國
立
交
通
大
學
運 輸 科 技 與 管 理 學 系
博 士 論 文
雷達車輛偵測及衝擊波技術應用於緊鄰路
口號誌控制之研究
Radar Vehicle Detection and Shockwave
Techniques for Signal Control of Closely
Spaced Intersections
研究生: 曾明德
指導教授:卓訓榮 教授
雷達車輛偵測及衝擊波技術應用於緊鄰路口號誌控制之研究
Radar Vehicle Detection and Shockwave Techniques for Signal
Control of Closely Spaced Intersections
研 究 生:曾明德
Student:Ming-Te Tseng指導教授:卓訓榮
Advisor:Hsun-Jung Cho國 立 交 通 大 學
運輸科技與管理學系
博 士 論 文
A DissertationSubmitted to Department of Transportation Technology and Management College of Management
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Doctor of Philosophy
in
Transportation Technology and Management
July 2012
Hsinchu, Taiwan, Republic of China
雷達車輛偵測及衝擊波技術應用於緊鄰路口號誌控制
之研究
學生:曾明德
指導教授:卓訓榮
國立交通大學運輸科技與管理學系 博士班
摘 要
在尖峰時刻,市區或高速公路匝道附近,常常會有數個緊鄰路口
的交通擁塞問題,其中號誌控制不當也常是擁堵主因。而在作智慧型
的號誌控制中,車輛偵測器的車流偵測能力更是關鍵因子。因此本研
究從車輛偵測器開始研究,除了偵測傳統流量、速度之外,並偵測十
字路口衝擊波,並應用該衝擊波技術作緊鄰路口的號誌控制。
本研究首先針對雷達車輛偵測器,提出車種、車速的演算法。該
演算法以最佳辨識演算法為基礎,結合影像處理來學習,使用支持向
量機 (Support Vector Machine)來辨識車種、支持向量迴歸 (Support
Vector Regression)來估計車長及分辨車種。以市區道路蒐集到的真實
資料驗證,並比較 K-mean 及線性判別分析法 (Linear Discriminant
Analysis)後,証實支持向量機及支持向量迴歸可成功精確地辨識機車、
小車、大車及超大車等多種車長及推估其速度。
接著,本研究利用前述雷達偵測器的偵測結果,提出新的三個交
通參數:空車、有車及停車,並利用此三參數結合車流理論導出路口衝
擊波的偵測方法,而且也在模擬環境成功驗證其可行性及精確程度。
最後本研究,提出一個以傳統觸動控制為基礎的臨界路徑控制方
法,該方法以關鍵行車路徑來設計時相、依車流回堵情形動態調整路
徑時相最大綠燈時間並在萬一車流在綠燈停止不動時,切換時相以避
免路口容量損失。該方法中,並以衝擊波理論為基礎推估各臨界路徑
上需求綠燈時間,進而提出最佳化模式,求解各路徑最佳均衡綠燈時
間。另外,也在一個實際的緊鄰路口組成的群組路口,模擬運作情形,
比起傳統觸動模式有顯著改善。
Radar Vehicle Detection and Shockwave Techniques for
Signal Control of Closely Spaced Intersections
Student: Ming-Te Tseng
Advisors: Hsun-Jung Cho
Department of Transportation Technology and Management
National Chiao Tung University
ABSTRACT
A complementary metal-oxide semiconductor based radar with
sensitivity time control antenna is successfully implemented for advanced
traffic signal processing. The collected signals from the radar system are
processed with developed optimization algorithms for vehicle-type
classification and speed determination. In course of optimization, a video
recognition module is further adopted as a supervisor of support vector
machine and support vector regression. In the meanwhile, skew training
data set and numerous classification scenarios are used to test the classifiers.
Finally, the results are analyzed and compared.
Beside, this investigation provides two traffic flow detection methods
for oversaturated signalized intersection. The first method detects
intersection shockwaves by innovative traffic parameters involving stopped
duration, moving duration, and empty duration. The second method
provides upstream arrival rate and speed by shockwaves, signal timing, and
traffic flow model. This research has a contribution to the detection of
shockwaves and upstream traffic parameters under over-saturated condition
which traditional detectors cannot provide.
Finally, a novel actuated critical path control model for designing
signal timings on closely spaced intersections is presented in this study.
Shockwaves are utilized to dynamically adjust maximal green time for each
critical path with unstable traffic demands. Combined with path-based
progression, this methodology suggests a novel way to deal with closely
spaced intersections. A real network had been exemplified with
micro-simulation to illustrate the effectiveness of the proposed method. The
numerical example demonstrates a satisfying result compare to ordinary
full-actuated scheme.
誌 謝
首先,感謝指導老師卓訓榮教授,多年指導;尤其在其身兼交通
部科技顧問室主任,犧牲奉獻國家之餘,尚且撥空幫忙;師母周幼珍
老師的仁慈關愛,亦是深感於心。李義明老師給予的文章協助,也深
表謝意。也感激張新立老師、韓復華老師、莊晴光老師、彭松村老師
在論文口試時的指導;另外也感謝吳宗修老師及蘇昭明老師於實務應
用上的指導。
接著,感謝父親曾兩傳及母親侯秋蓮女士的含辛茹苦的栽培,太
太譚小珠在就學期間的支持,以及兩個小孩曾致淳、曾祐謙的可愛陪
伴!
最後,對於藍健綸博士的文章寫作協助,特別感謝。學弟黃恆、
怡穎、柏元、威廷、楷霖的協助也表謝意。
Table of Contents
摘要 ... i Abstract ... ii 致謝 ... iii Table of Contents ... iv List of Figures ... vi List of Tables ... ix I Introduction ... 1 1.1 Background ... 1 1.2 Problem definition ... 3 1.3 Research objectives ... 4 1.4 Research Contributions ... 4 1.5 Research layout... 5 II Literature Review ... 62.1 Radar vehicle detection ... 6
2.2 Shockwave estimation ... 13
2.3 Signal control methods ... 17
III Research methodology ... 29
3.1 Radar vehicle detection algorithm ... 29
3.2 Three new traffic parameters ... 40
3.3 Shockwave detection ... 41
3.4 Upstream speed and flow detection ... 55
3.5 Signal control algorithm ... 57
IV Results and Discussion ... 67
4.1 Radar vehicle detection ... 67
4.2 Three new traffic parameters ... 75
4.3 Shockwave detection ... 78
4.5 Traffic signal control algorithm ... 84 V Conclusions ... 89 Reference ... 92
LIST OF FIGURES
Figure 2.1 Side-fired radar detector ... 6
Figure 2.2 Radar signal power over road surface ... 6
Figure 2.3 FMCW Radar concept ... 9
Figure 2.4 Doppler frequency in FMCW Radar ... 9
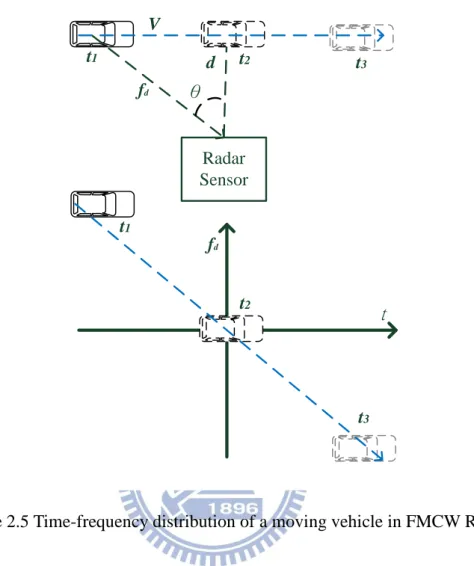
Figure 2.5 Time-frequency distribution of a moving vehicle In FMCW Radar ... 10
Figure 2.6 Shockwaves at an intersection ... 14
Figure 2.7 Shockwaves in flow-density curve ... 15
Figure 2.8 Shockwaves in time-distance diagram ... 15
Figure 2.9 Shockwaves and queue length detection in an intersection ... 16
Figure 2.10 Shockwaves in time-space domain for a signalized intersection ... 17
Figure 2.11 Actuated phase intervals ... 21
Figure 2.12 A maximum band along an arterial ... 26
Figure 3.1 (a) A picture of a vehicle passing through the detection area of a radar (b) The spectrogram of the vehicle in (a) ... 30
Figure 3.2 The flowchart of the vehicle detection algorithm ... 31
Figure 3.3 Video training and calibrating system ... 38
Figure 3.4 Moving, empty and stopped duration ... 41
Figure 3.5 (a) Ideal shockwaves (b) Ideal shockwaves and general shockwaves (c) Five shockwaves relations (d) Five shockwaves in time-space diagram ... 42
Figure 3.6 The relation between shockwaves ... 43
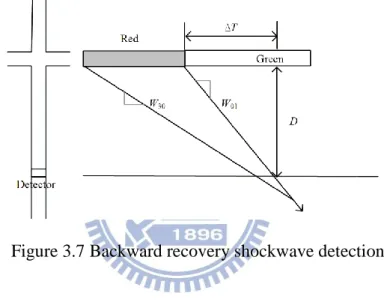
Figure 3.7 Backward recovery shockwave detection ... 45
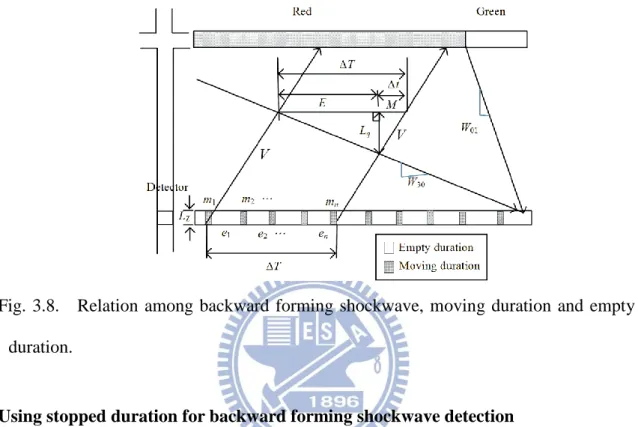
Figure 3.8 Relation among backward forming shockwave , moving and empty duration ... 48
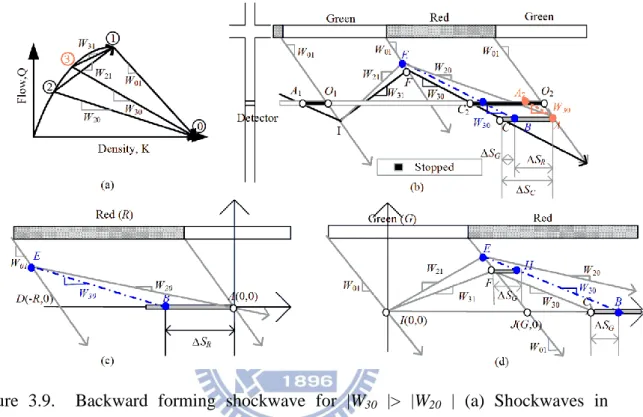
Figure 3.9 Backward forming shockwave for |W30 |> |W20 | ... 49
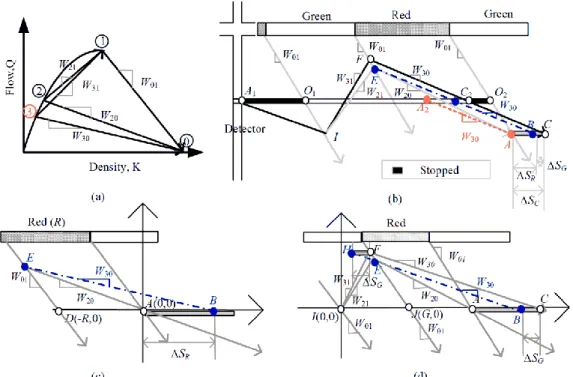
Figure 3.10 Backward forming shockwave for |W30 |< |W20 | ... 50
Figure 3.11 A vehicle‟s stopped duration is equal to red phase time ... 54
Figure 3.12 (a) The flowchart for five shockwaves detection. (b) The flowchart for backward forming shockwave detection ... 56
Figure 3.13 Four critical paths in three closely spaced intersections ... 59
Figure 3.14 (a) One-way progression in time-space diagram (b) Four-way Progression in path-intersection diagram ... 60
Figure 3.15 Full-actuated control with (a) gap out (b) max out when a vehicle stops on detection zone. ... 61
Figure 3.16 (a) Three traffic parameters: empty, moving and stopped durations (b) Enhanced actuated control with a “stopped out” condition. ... 62
Figure 3.17 Four critical paths in three closely spaced intersections ... 63
Figure 3.18 Flowchart of actuated critical path control algorithm ... 65
Figure 4.1 (a) Installation of radar sensor (b) The echo powers distribution for each lane of road ... 68
Figure 4.2 Block diagram of the proposed X-band FMCW sensor ... 69
Figure 4.3 Vehicle output lengths from SVR ... 74
Figure 4.4 Estimated vehicle speeds ... 74
Figure 4.5 Relationships between the three traffic parameters and VD distance from the stop bar ... 77
Figure 4.6 (a) Stopped, Moving and Empty durations in VD1 (b) Stopped, Moving and Empty durations in VD2 (c) △Stopped duration in VD1 and VD2 (d) Moving/(Moving+Empty) in VD1 and VD2 ... 78
Figure 4.7 The intersection of simulation ... 79
Figure 4.8 (a) The phase times of the intersection (b) The input flow of the link ... 79
Figure 4.9 (a) The stopped duration, moving duration and empty duration of detector 1 (b) The stopped duration, moving duration and empty duration of detector 2 ... 80
Figure 4.10 Relation between the stopped duration and red phase time ... 80
Figure 4.11 Results of the backward forming shockwave detection algorithm ... 81
Figure 4.12 Comparison of calculated / directly-measured shockwaves of the approach ... 82
Figure 4.13 The comparison of different arrival pattern and its
corresponding bias in shockwave estimation ... 83 Figure 4.14 The predicted traffic flow of state 3 ... 84 Figure 4.15 The predicted traffic speed of state 3 ... 84 Figure 4.16 Relation between the maximal green time and traffic
flow for proposed model. ... 87 Figure 4.17 Queue times of paths under (a) stable demand
(b) unstable demand. ... 87 Figure 4.18 Queue delay of paths under (a) stable demand
(b) unstable demand ... 87 Figure 4.19 Speed of paths under (a) stable demand
(b) unstable demand ... 88
LIST OF TABLES
Table 4.1 The specifications of radar sensor ... 67
Table 4.2 Set of vehicles used to test the classifiers ... 70
Table 4.3 The classification rate of classifiers ... 71
Table 4.4 Vehicles obtained from a field ... 71
Table 4.5 Leave-one-out recognition rate for different classifiers and categories. ... 72
Table 4.6 Leave-one-out error matrix for SVM( fm2)... 73
Table 4.7 Virtual loop length for each lane ... 74
Table 4.8 Summarized relationships between three traffic parameters and the environment. ... 76
Table 4.9 Experimental scenarios for model evaluation ... 85
I. Introduction
1.1 Background
Accurate methods of collecting traffic information are essential in an intelligent
transportation system (ITS). Traffic data has been gathered primarily via inductive loop
detectors, pneumatic road tubes, and temporary manual counts. However, traffic
detectors developed recently use video, sonic, ultrasonic, radar or infrared energy. These
detectors are non-intrusive and mounted either overhead or to the side of traffic lanes.
Considering the cost, radar and video sensors both have multi-lanes capability. A single
detector of either of these types can detect up to eight or ten lanes. However, poor
weather conditions, such as snow and heavy rain, can seriously impact video sensors. In
contrast, radar sensors still function effectively in poor weather. Therefore, radar sensors
are a good choice in ITS applications owing to their multi-lane coverage and resistance
to weather impacts.
Numerous classifiers have been developed and tested for data cluster or pattern
recognition, and these classifiers are categorized into two types: supervised and
unsupervised. In supervised learning, the aim is to learn a mapping from the input to an
output whose correct vehicle classes are provided by a supervisor. In unsupervised
learning, there is no such supervisor and we only have input of data. K-mean cluster is a
famous unsupervised classifier that has been used for numerous applications.
Furthermore, support vector machine (SVM) and linear discriminated analysis (LDA)
are two supervised classifiers. LDA was originally developed in 1936 by R.A. Fisher.
SVMs have been used for isolated handwritten digit recognition, object recognition,
speaker identification and face detection in images. To find the optimal classifier, this
a virtual loop concept that requires vehicle and virtual loop length to make an estimate.
Support vector regression (SVR) is used to predict vehicle length, while a video
calibrating system is used to measure virtual loop length. A skew training data set and
numerous classification scenarios are used to test the classifiers.
According to the Doppler Effect, the frequency of the radio wave will become
higher than the original frequency when the object approaches the radar device, and the
frequency of the radio wave will become lower than the original frequency when the
object moves away from the radar device. Therefore, the frequency variations of the
reflective signal is analyzed to acquire vehicle‟s speed; in other word, when a vehicle
moves at a high enough speed to generate the Doppler Effect, the reflective radio wave
from the vehicle will generate the Doppler shift. The Doppler frequency versus time
variations of the reflective radio wave is recorded and the relative speed of the vehicle
and the radar can be computed.
Real-time upstream traffic information is important because adaptive models must
have them to predict future traffic flow and compute the signal timing. Under
non-oversaturated situation, vehicle detectors can provide such real-time upstream
information. However, vehicle detectors are not capable to provide upstream flow
accurately under oversaturated traffic condition; vehicles often have a full stop at
detection zone and the detected flow is not “arrival” but “departure”. Hence, this
research utilizes another robust oversaturated traffic parameter, shockwave. The
shockwave detection methodology is also proposed to show its effectiveness.
To estimate shockwaves under oversaturated traffic situation, this research utilizes
innovative traffic parameters, including stopped duration, moving duration, and empty
Closely spaced intersections are characterized as having short link distance
between intersections; the physical spacing between the intersections is small. These
intersections often become traffic bottleneck during peak hours due to its physical
configuration. With inappropriate signal design and short links, traffic queues are likely
to spill-back and cause an inefficient signal operation. The jammed traffic is generally
derived from poor progression or unstable demands. Poor coordination of the signals
leads to queue spill-back from one intersection that can seriously disrupt operation of
the adjacent intersection. Furthermore, although several methods have been used to
mitigate the congestion of closely spaced intersection, they seldom focused on the
crooked traffics of the adjacent minor approaches. As the traffic demand on minor
approaches grows, progression on those approaches should also be introduced. Despite
the contribution of those researches, most of such models have not addressed such
progression issue. Traffics in closely spaced intersections are treated as paths in this
study. These paths would unfold hiding conflict points which would not easily be seen
while considering flows on different approaches only. These conflict points often cause
safety and efficiency issues, especially during oversaturated periods. Therefore,
progressions in these closely spaced intersections have a multi-path nature rather than
two-way progression on arterials.
1.2 Problem definition
The mixing of motorcycles and other traffic is hazardous in Asia. Currently, most
radar detection algorithms classify vehicles into three or five categories, but generally
exclude motorcycles from the classification system. How to detect motorcycles by radar
sensor should be focused. Beside, speed estimation is not accurate for single transceiver
Vehicle detectors are not capable to provide upstream flow accurately under
oversaturated traffic condition; vehicles often have a full stop at detection zone and the
detected flow is not “arrival” but “departure”. The shockwave is a robust detectable
parameter under oversaturated traffic condition and has been applied to traffic control
for a long time. An accurate estimation method for shockwave needs to be developed.
Closely spaced intersections often become traffic bottleneck during peak hours due
to its physical configuration. The jammed traffic is generally derived from poor
progression or unstable demands. Therefore, phasing sequence design and dynamic
green time adjustment need to be solved analytically.
1.3 Research objectives
The main objectives of this research effort can be summarized as follows:
To find a high recognition rate optimization algorithm for the vehicle-type
classification and speed determination of radar detector.
To provide two upstream flow estimation methods for oversaturated signalized
intersections; both methods are based on shockwaves of a signalized intersection. The
first method calculates shockwaves by combining the new traffic parameters and traffic
flow model. The second method makes use of the shockwaves derived from method one
and provides upstream flow estimation.
To find a signal control method to mitigate the oversaturated traffic condition in
closely spaced intersections.
1.4 Research contributions
This study illustrates a radar sensor classification scheme that classifies vehicles
successfully combine two supervised learning algorithms to do vehicle classification
and speed estimation: support vector machine and support vector regression.
The shockwave estimation method contributes 1) providing a general estimation
method for five shockwaves in an intersection, 2) the model formulation takes dynamic
signal timing into consideration, 3) the capability of predicting required green time to
discharge traffic queue, and 4) introducing an upstream flow estimation method that
capable to provide information beyond the detection zone of vehicle detectors.
The proposed signal control method which can: (1) improve signal operation by
path-based progression instead of two-way progression, (2) introduce a novel phase
change concept for full-actuated control to prevent capacity loss, and (3) modify
existing full-actuated control to suit the closely spaced intersections and to dynamically
adjust maximal green time according to unstable traffic demands.
1.5 Research layout
This dissertation is organized as follows. First, the introduction chapter gives an
overview of the background, problem definition, research objectives, contributions and
overview of this dissertation. Second, chapter 2 presents a literature review of related
researches in the relevant areas. The literature review chapter concerns about topics,
including: i) radar vehicle detection algorithms, ii) Shockwave detection and iii) signal
control methods.
Radar vehicle detection algorithm, shockwaves detection model and optimal signal
control algorithm for closely spaced intersections are proposed in chapter 3. In chapter 4,
numerical examples with real data for radar vehicle detector are discussed; shockwaves
and closely spaced intersections are simulated. The last chapter presents the conclusions
II Literature Review
This chapter provides literature reviews relevant to the formulation and solution algorithm of radar vehicle detection, shockwave estimation and closely spaced signal control problem. The following sections are organized as (i) radar detection algorithms, (ii) shockwave detection algorithms, (iii) signal control methods
2.1 Radar vehicle detection
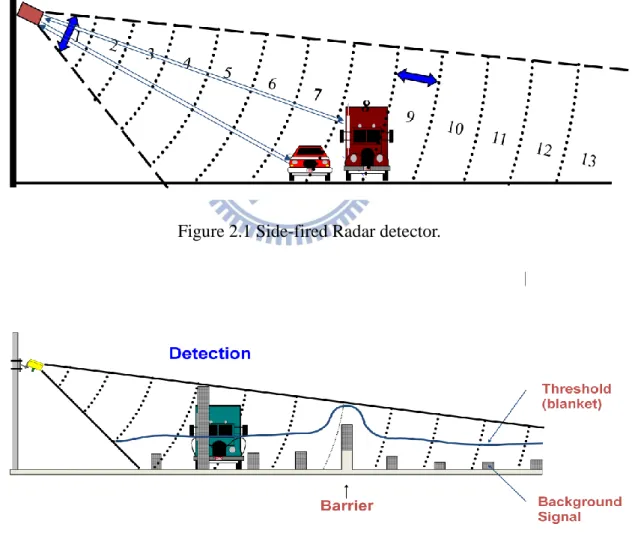
Figure 2.1 Side-fired Radar detector.
Microwave radar was developed for detecting objects. The word radar was derived
from the function that it performs: Radio Detection and Ranging. The term microwave
refers to the wavelength of the transmitted energy of 1GHz to 30 GHz. Microwave
sensors designed for traffic data collection are limited to intervals near 10.525 or 24.0
GHz. Sensors with 10.525GHz have lower range resolution , bigger size and lower cost
than sensors with 24Ghz.
Microwave sensors are generally mounted as side-fire configuration (as Figure
2.1). Side-fire mode is mounted on a roadside pole with its footprint aimed at right
angle to the traffic lanes. Side-fire mode can monitor up to 10 lanes for each sensor.
The sensor receives the reflected signals from all surfaces within its beam – pavement,
barriers, vehicles and trees. It maintains a background signal level from fixed objects in
each range slices. Vehicles are detected when their reflected signal exceeds the
background level of their range slice by a certain amount called threshold (see Figure
2.2).
The main types of microwave radar sensors are used in roadside are Frequency
Modulated Continuous Wave (FMCW) radar [1, 2] in which the transmitted frequency
is constantly changing with respect to time, as illustrated in Figure 2.3. The FMCW
radar operates as a presence detector and can detect motionless vehicles.
The carrier frequency increases linearly with time. The ramp slope is given byΔf/Δt.
The echo is received after the round trip time Tr = 2R/c where R is the distance to the
target. The echo is mixed with a portion of the transmitted signal to produce an output
beat frequency,
(2.1)
A moving vehicle will superimpose a Doppler frequency shift on the beat
frequency fd. One portion of the beat frequency will be increased and the other portion
will be decreased. For a target approaching the radar, the received signal frequency is
increased (shifted up in the diagram) decreasing the up-sweep beat frequency and
increasing the down-sweep beat frequency (see Figure 2.4)
fb(up) = fb - fd, (2.2)
fb(dn) = fb + fd.
If we look at the Doppler frequency when a vehicle passes through the radar
antenna beam, the Doppler shift of a reflected signal is proportional to the velocity of
the vehicle and to the angle at which the signal is reflected. This relationship is
described by the equation: For small angle Sinθ=θ, hence
(2.3)
Therefore, the Doppler shift changes linearly and pass through zero as the vehicle
pass through the sensor‟s field of view [3](As Figure 2.5). The slope of this linear
change is a function of the velocity of the target and the distance of the target‟s path
from the sensor. The Doppler shift of reflected angle is measured multiple times as the
vehicle passes through the field of view of side fire sensor. A linear fit is applied to the
Doppler shift measurements and results in a slope m. The slop m is converted to a speed
by
. (2.4) Another vehicle speed estimating method is to use the virtual loop concept [4, 5, 6],
Figure 2.3 FMCW Radar concept.
Radar Sensor θ d fd t V t2 t2 t1 t1 t3 t3 fd
Figure 2.5 Time-frequency distribution of a moving vehicle in FMCW Radar.
The speed of vehicle is calculated as
, (2.5) where L is the length of detection zone, Lv is the average effective length of
vehicles and Δt is the detector on time. The virtual loop speed can be a good result for
average speed. But it is not accurate in general.
Radar and inductive loop detectors have historically performed vehicle
classification by providing estimates of vehicle length based on vehicle speed ,v , and
the detector on time. The equation for vehicle length, Lv, is given by
H. Roe and G. S. Hobson (1992) [7] have described a forward-looking FMCW
Radar which can separate traffic into five classes. This single lane detector uses the
profile of vehicle to do vehicle classification. The profile is formed by the vehicle
height and length. The vehicle speed is calculated from Doppler effect. Park et al. (2003)
[8] have developed a FMCW side-looking vehicle detection radar. The velocity is
estimated by using the appearance duration of the reflected signal and the length of
detection zone and Doppler shift. The classification of a vehicle, as large, medium or
small size, is possible by processing received power and spectrum pattern
Numerous statistic learning methods have been developed and tested for data
cluster or pattern recognition, and these classifiers are categorized into two types:
supervised and unsupervised. In supervised learning, the aim is to learn a mapping from
the input to an output whose correct vehicle classes are provided by a supervisor. In
unsupervised learning, there is no such supervisor and we only have input of data.
K-mean cluster is a famous unsupervised classifier that has been used for numerous
applications. Furthermore, support vector machine (SVM)[9, 10] and linear
discriminated analysis (LDA) [11, 12] are two supervised classifiers. LDA was
originally developed in 1936 by R.A. Fisher [13]. SVMs have been used for isolated
handwritten digit recognition, object recognition, speaker identification and face
detection in images.
K-means is one of the best known data clustering methods. The goal of k-means is
to find k points of a dataset that best represent the dataset in a certain mathematical
sense. These k points are also known as cluster centers. After obtaining these cluster
centers, they can be used for data classification.
LDA is a supervisory classifier. LDA obtains a linear transformation ("discriminant
that provides more accurate discrimination than either predictor alone. A transformation
function is found that maximizes the ratio of between-class to within-class variance.
The transformation seeks to rotate the axes so as to maximize the differences between
the groups when the categories are project on the new axes. In the ideal case, a
projection can be found that completely separates the categories. However, in most
cases no transformation exists that provides full separation, so the objective is to obtain
the transformation that minimizes the overlap among the transformed distributions. The
LDA can be derived as a plug-in Bayes classifier. LDA projects the nine feature
dimension space considered in this study into a three dimension linear discriminant (LD)
space. The plug-in classifier finds the average group centers for each vehicle category
and saves it. When predicting a test sample vehicle, the classifier measures the
Mahalanobis distance between the group center and the LD project point of the vehicle
features. The plug-in classifier then estimates the posterior probability of each group
using Mahalanobis distance, the prior probability which is the group probability of
training set, and the covariance matrix. The testing vehicle belongs to the group with
the highest posterior.
SVM is also a supervisory classifier. SVMs attempt to identify a set of support
vectors, two support hyperplanes, and an optimal hyperplane for separating two groups.
SVM is a binary classifier. Two strategies can be developed to support multiple
classifications: one-against-one and one-against-rest. The one-against-rest strategy
constructs k SVMs to separate k groups. The m-th SVM separates the m-th group from
the others. For k groups, the one-against-one strategy constructs k(k-1)/2 SVMs to
2.2 Shockwave estimation
The theory of shockwaves had first developed by Lighthill and Whitham[14] .
Such shocks are generated at the discharge rates fall due to congestion or the
termination of a phase. The shockwave appears due to vehicle speed change, and this
configuration is very comprehensive to analyze traffic behaviors. As Figure 2.6 [15],
the trajectories of shockwaves were derived by assuming an average arrival rate at the
queue tail. It is noted that y1(0), y1(c) represent the initial and final queue length and the
line A1,C1,M1,D1,E1 the trajectory of the queue tail at which a shockwave is formed, l1
and l2 are the lost time during phase transitions and g1 is effective green time. By the
shockwave concepts at a signalized intersection, the required green time, queue length
and the end time of shockwave are listed as following equations.
The minimal green time for under-saturated approach is
1) (2.6)
The end time of shockwave A1,C1 is
) (2.7)
The final queue length for E1 is
t x B1 D 1 C M 3 2 L N c Y y (0) A y (c) 2 1 1 g1 l1 l2+g2 1 1 B1 , F1 1 E1 1
Figure 2.6 Shockwaves at an intersection [15].
A.D. May [16] have analysis the shockwave at signalized intersection as Figure 2.7.
A flow-density curve and approaching traffic flow states A, B, C and D are specified. A
distance-time diagram is shown in Figure 2.8 so that the slopes WAB, WBC, WAC and
WAD in two diagrams represent shockwave speeds. Then, the required green time to
discharge the traffic is
(2.9)
The maximal queue length is
(2.10)
Although some green time and queue length had been explored in the article, the
shockwave speeds are calculated by the flow and density difference between flow
A UA UC WAC C B D W BC W AB WDB WDC W DA Density (veh/mile/lane) F lo w ( v eh /h r/ la n e) 0
Figure 2.7 Shockwave in flow-density curve[16].
D is ta n ce t0 t1 t2 B t3 A WAD A A Time A WAB B WCD D WAD T4 t5 t6 A A WDC D C C WDB WAB WBC W AC
Figure 2.8 Shockwave in time-distance diagram[16].
Instead of counting arrival traffic flow in the current signal cycle, Xinkai et al.
(2009)[17] solve the problem of measuring intersection queue length by exploiting the
queue discharge process in the immediate past cycle. As Figure 2.9 , the authors find the
break points for A, B and C by detector occupancy time, and applying Lighthill–
Whitham–Richards (LWR) shockwave theory, the authors are able to identify the
Figure 2.9 Shockwaves and queue length detection in an intersection [17].
Shockwave analysis has long been applied to traffic flows [18, 19]. Shockwaves
are defined as boundaries in the time-space domain that indicate a discontinuity in
flow-density conditions [16], or the motion of a change in concentration and flow [20].
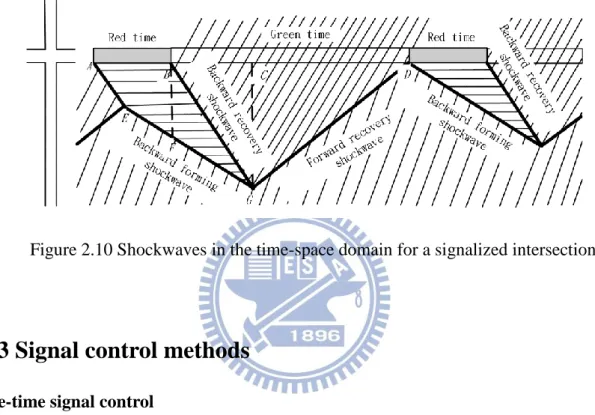
A typical time-space diagram at a signalized intersection is illustrated in Figure 2.10,
where the trajectories of individual vehicles are shown as thin black lines. Three types
of shockwaves are represented as thick black line segments:EG, a backward forming
shockwave; BG , a backward recovery shockwave; andGD, a forward recovery
shockwave [16]. Shockwave analysis can effectively analyze flow and queuing
problems [21, 22]; queue can be describe as BF and CGin Figure 2.10. Researchers
have applied shockwaves to compute delay (area AEGB in Figure 2.10) and green phase
time (BD in Figure 2.10) for traffic signals control [23, 24, 25]Numerous schemes have
also been proposed for plotting shockwaves and forecasting traffic system performance
[18, 21].
by traditional traffic parameters including volume, speed, and density [22, 26, 23, 25, 27,
28]. While others calculate shockwave by combining gap time, headway and speed [21],
or make use of high-resolution vehicle actuation data and signal information [29, 17,
30]. Skabardonis estimates upstream flow with flow, occupancy and phase timing while
traffic queue beyond vehicle detector[31] .
Figure 2.10 Shockwaves in the time-space domain for a signalized intersection.
2.3 Signal control methods
Pre-time signal control
The pre-timed control, which has fixed cycle lengths and preset phase times,
operates according to a predetermined time schedule. The pre-timed controllers are best
suited for locations with stable volumes and traffic patterns such as downtown areas.
Timing plans are usually selected on a time-of-day/ day-of-week basis. Although
pre-timed controllers have a degree of flexibility for daily traffic, they can cause
excessive delay when the traffic signal controller uses timing plans determined from
historical demands. The Webster method can be used to determine the optimum cycle
lengths for minimal delay.
the cycle length is obtained by the equation
(2.11)
where:
C = optimal cycle length (second); L = total lost time per cycle (second);
yi = the critical lane group volume (i th phase, vph) / saturation flow (vph);
n = number of phases.
The total lost time is the time not used by any phase for discharging vehicles. Total
lost time is given as
(2.12)
where:
li = lost time for phase i, which is usually 4 seconds; R = the total all-red time during the cycle.
The total effective green time, available per cycle, is given by
(2.13)
To obtain minimum delay, the total effective green time should be distributed
among the different phases in proportion to their y values to get the effective green time
for each phase,
(2.14)
The actual green time for each phase (not including yellow time) is obtained by
(2.15)
Actuated signal control
An actuated signal [33] operates with variable vehicular timing and phasing
intervals that depend on traffic volumes. The signals are actuated by vehicular detectors
placed in the roadways. The cycle lengths and green times of actuated control may vary
from cycle to cycle in response to demands. Actuated controllers include semi-actuated,
fully actuated, and density controllers.
In semi-actuated operation, the main street has a “green” indication at all times
until a vehicle or vehicles have arrived on one or both of the minor approaches. The
signal then provides a “green” phase for the side street that is retained until vehicles are
served, or until a preset maximum side-street green is reached. Non-actuated phases
may be coordinated with nearby signals on the same route, or they may function as an
isolated control. Non-actuated phases usually operate with fixed minimum green times
and may be extended by using green time that is not used by actuated phases with low
demand. That is, the green duration will be extended beyond the minimum green time
until a vehicle actuates the detector on the side street. At a semi-actuated controlled
intersection, detectors installed on the side street collect information for timing the
signal.
In fully actuated operations, all signal phases are controlled by detector actuations.
In general, each phase has a minimum green duration, but it also is shorter than the
maximum green time. A phase in the cycle may be skipped entirely if no demand exits
for that phase. The right of way does not return automatically to a specific phase under
the fully actuated mode unless recalled by a special setting in the controller. That is, the
controller shows green indication in the phase last served until conflicting demand
appears.
reduce the allowable gap according to several rules as vehicles show up or as time
progresses. The specifications allow gap reduction based only upon time waiting on the
red. This type of controller also has a variable initial interval, thus allows a variable
minimum green. Detectors are normally place farther back of the intersection stop line,
particularly on high-speed approaches to the intersection of major streets.
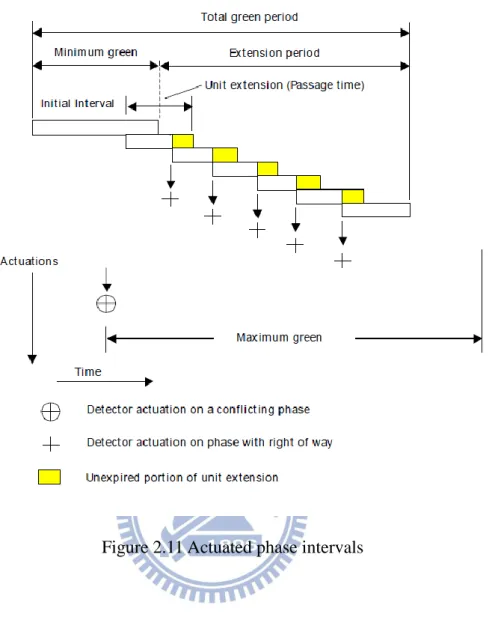
The timing characteristics of actuated signal operation are introduced here. In an
actuated phase, there are three timing parameters: the minimum green interval, the unit
extension, and the maximum green interval. These intervals are a function of the type
and configuration of the detectors installed at the intersection. These three intervals are
shown in Figure 2.11. This figure shows a case that the phase terminates before it
reaches the maximum green period because there is no vehicular actuation in the last
unit extension period.
The unit extension is time by which a green phase could be increased during the
extendable portion after an actuation on that phase. It depends on the average speed of
the approaching vehicles and the distance between the detectors and the stop line.
Initial interval is the first portion of the green phase that is adequate to allow
vehicles waiting between the stop line and the detector during the red phase to clear the
intersection. This time depends on the number of vehicles waiting, the average headway,
and the starting delay.
The minimum green interval is the shortest time that should be provide for a green
interval during any traffic phase. In basic design of actuated phase intervals, the
Figure 2.11 Actuated phase intervals
The maximum green interval is the limit that a phase can hold green in the
presence of conflicting demand. Normal range of maximum green is between 30 and 60
seconds depending on traffic volumes. Webster‟s model for pre-timed controllers can be
used to compute the maximum green interval. The computed green intervals are
multiplied by a factor ranging between 1.25 and 1.50 to obtain the maximum green.
Traffic-actuated controllers automatically determine cycle lengths and phase
durations based on detection of traffic on the various approaches. The cycle lengths and
green times are random variables, which depend on the real-time traffic demand.
Synchro software
Synchro [34] is a macroscopic and deterministic signal timing tool. Synchro has
the following features: it is able to simultaneously optimize lead-lag phase ordering in
addition to cycle lengths, phase lengths, and coordinated offsets, Percentile Delay
estimation method, data input and comprehensive output options, capability of
modeling RTOR, U-turns and six-legged intersections, capability of modeling
signalized and signalized intersections and roundabouts and it allows exporting its files
to CORSIM and HCS.
Synchro implements the HCM 2000 procedures for signalized intersections
capacity and delay calculation. Also, it possesses percentile delay calculation method
and intersection capacity utilization (ICU) 2003 methods. The basic premise of the
percentile delay method is that traffic arrivals follow a Poisson distribution. The
percentile delay method calculates vehicle delays for five different scenarios (i.e., 10th,
30th, 50th, 70th and 90th percentiles) and takes a volume weighted average of delays
predicted for each scenario. The ICU method sums the amount of time required to serve
all movements at saturation for a given cycle length. It is similar to taking sum of
critical volume to saturation flow ratios (v/s), yet allows minimum timing to be
considered. The ICU can tell how much reserve capacity is available or how much the
intersection is overcapacity.
Synchro does not use the Genetic Algorithm for optimization of signal timings.
The optimization objective function available is minimizing the percentile delay. It
optimizes the four signal timing parameters by evaluating a series of cycle lengths,
The best cycle length is found by calculating a performance index (PI).
The PI is calculated as follows.
(2.16) where
PI = Performance Index;
D = Percentile Signal Delay (s);
QP = Queue Penalty (vehicles affected);
ST = Vehicle Stops (vph);
D= ;
VD10 = 10th percentile Vehicle-Delay per
hour;
v10 = 10th percentile volume rate (vph).
TRANSYT 7F
TRAffic Network StudY Tool (TRANSYT) is one of the most widely used signal
timing programs. The original version of TRANSYT was developed by Dennis
Robertson at the Transportation and Road Research Laboratory in UK in 1967. Though
TRANSYT is most commonly used as an offline optimization tool, it may also be used
in an online fashion to compute signal settings every few minutes and download these
settings to the field. TRANSYT is a macroscopic, deterministic simulation and
optimization model. The model requires the link flows and link turning proportions as
inputs and assumes them to be constant for the entire simulation period. The program
optimizes splits and offsets given a set cycle length and carries out a series of iterations
module. TRANSYT-7F (Traffic Network Study Tool, version 7, Federal) [35] was
“Americanized” for the Federal Highway Administration (FHWA) in 1981 by the University of Florida Transportation Research Center. TRANSYT-7F Release 10.1
introduced in January 2004 included the ability to optimize cycle length, phase
sequence, green splits and offsets using a genetic algorithm (GA) and a traditional
hill-climb technique. Recent versions of TRANSYT-7F introduced the CORSIM
simulator in its optimization of cycle length, green splits and offset only. The
direct-CORSIM optimization in T7F consists of the CORSIM simulator and the GA
optimizer. It uses the CORSIM input file (*.trf) as an input so that T7F can directly
import all information related to the network and signal timing plan from the CORSIM
input file.
TRANSYT-7f includes detailed simulation of platoon dispersion, queue spillback,
queue spillover, traffic-actuated control, and the flexibility to perform lane-by-lane
analysis. Beside link wise simulation, TRANSYT-7F provides stepwise simulation
which updates all links one time step at a time. With stepwise simulation,
TRANSYT-7F can explicitly model queue spillback condition. TRANSYT-7F provides
left-hand drive right-hand drive option and it can only simulate two-way stop-controlled
(TWSC) intersections. HCS files can be loaded directly into T7F and timing plans can
be exported from T7F to HCS. Many traffic principles embedded in TRANSYT-7F such
as arrival type, delay calculation, level of service, capacity calculation and saturated
flow calculation are based on HCM 2000 procedures. TRANSYT-7F includes measures
of effectiveness (Throughput) for use in optimization of congested networks.
TRANSYT-7F has twelve distinct criteria. These criteria include functions designed to
The performance index (PI) may be defined as follow: PI= (2.17) MAXBAND
In 1966, John D. C. Little and his research colleagues at MIT defined the new state
of the art, called MAXBAND[36, 37, 38], ending with a set of algorithms to
synchronize fixed-timed traffic lights for streets with two-way traffic. It is one of the
representatives of the Fixed-Time Coordinated Control Strategies. By their nature,
fixed-time strategies are only applicable to under-saturated traffic conditions.
MXBAND considers a two-way arterial with n signals from S1 to Sn (intersections)
and specifies the corresponding offsets in order to maximize the number of vehicles
traveling at given range of speed without stopping at any signal (green wave).
MAXBAND considers splits as given (in accordance with the secondary street
demands); hence the problem consists in placing the known red durations of the
arterial‟s signals to maximize the inbound and outbound bandwidths In_B and Out_B, respectively (See Figure 2.12). In order to make MAXBAND work for a network of
arterials, Little (1966) extended the basic MAXBAND method by incorporation of
some cycle constraints. MAXBAND used into several networks into North America and
Figure 2.12 A maximum band along an arterial [36].
The underlying optimization model in MAXBAND is a Mixed Integer Linear
Programming (MILP) model. MAXBAND include its freedom to provide a range for
the cycle time and speed and it can operate a traffic signal effectively through the
interlocking control of neighboring intersections. Its disadvantages are the lack of
incorporated bus flows, limited field tests and because it is based on off-line analysis, it
is impossible for it to cope actively with irregularities in the traffic environment.
MAXBAND optimizes the signal by maximizing arterial progression bandwidth.
The output of the program includes cycle time, offsets, speeds and order of left turn
phases to maximize the weighted combination of bandwidths. The program can
automatically choose cycle time from a given range, allow the design speed to vary
within given tolerances, select the best lead or lag pattern for left turn phases from a
specified set, allow a queue clearance time for secondary flow accumulated during red,
network in the form of a three artery triangular loop.
The limitation of Maximization existing bandwidth is that the progression bands do
not correspond to the actual traffic flows on the arterial links. Therefore, bandwidth
maximization will not always lead to optimal system performance in terms of stops,
delay, and fuel consumption.
Near researches
The jammed traffic of closely spaced intersections is generally derived from poor
progression, unstable demands and inefficient signal operation. Poor regression of the
signals leads to queue spill-back from one intersection to upstream intersections. To
solve the aforementioned problems, researches focused on oversaturated demand,
closely spaced intersections, and traffic flow theories should be considered together.
Abu-Lebdeh and Benekohal [23] had developed a traffic control method and queue
management procedures for oversaturated arterials. Chang and Sun [39] had optimized
an oversaturated network by utilizing a bang-bang like model for the oversaturated
intersections and TRANSYT-7F for the undersaturated intersections. Michalopoulos and
Stephanopoulos brought the concept of shockwave theory to traffic signal control [29].
Tian, Urbanik and Gibby [40] had an application of diamond interchange control
strategies on a site of six closely spaced intersections. Messer [41] had studied the
traffic operations at oversaturated, closely spaced signalized intersection by NETSIM
simulations. Liu and Chang [42] had an arterial signal optimization model to do with
queue spill-back and lane blockage. Existing researches usually paid attention to
through traffics of the arterial; however, they seldom focused on the crooked traffics of
the adjacent minor approaches. As the traffic demand on minor approaches grows,
progression on those approaches should also be introduced. Despite the contribution of
Existing full-actuated signal scheme can only be applied to arterials; not much it
can do while facing a path-based progression situation. Zheng and Chu [43] and
Skabardonis [31] suggest methods to dynamically adjust maximal green for
full-actuated control under oversaturated traffic. With adjustable maximal green,
full-actuated control scheme have the potential to adaptive to oversaturated demands.
However, full-actuated schemes are focused on approach or arterial; they never focused
on path-based progression. Therefore, they should be modified to suit the specific
III. Research methodology
In this chapter, some essential concepts of the critical path signal control of closely
spaced intersections are discussed. Begin with the introduction to Radar vehicle
detection algorithm, the brief introduction to three new traffic parameters is addressed
in section 3.2. Section 3.3 shows the shockwave detection at intersection. The
estimation for upstream flow and speed by shockwave concept is illustrated in section
3.4. A critical path signal control algorithm is introduced, in section 3.5.
3.1 Radar vehicle detection algorithm
The radar cross section (RCS) of a vehicle is the key information used in vehicle
classification and speed estimation. Figure 3.1 shows a sample RCS signal of a car
received from the installation of Figure 3.1(a). The closed area indicated by a dashed
line is the detection area of the radar detector. The profile of a vehicle signal resembles
a mountain, and different vehicles create different shaped mountains. The vehicle
classifier extracts features from the profiles and classifies vehicles accordingly.
The speed estimator also identifies features from the profiles and calculates the
vehicle speed. Vehicle RCS is influenced by radar height and angle, radar distance from
the first lane, vehicle speed, vehicle shape and vehicle distance to radar. Most of these
factors are only fixed on the completion of radar sensor installation. Restated, the
vehicle profiles were completely changed when the environmental installation was
adjusted. This is a constraint for the supervised classifier, which needs to be retrained
for each new environmental installation. Generally, traffic managers hope that sensor
setup minimally impacts traffic condition. It means that the sensor setup time must be
If a training classifier is provided, the learning data is gathered during setup. Short setup
time results in a skewed distribution of vehicle types. The number of cars may be large
while the number of trucks is few. This forms the second constraint: short training time
and skewed training data.
Figure 3.1 (a) A picture of a vehicle passing through the detection area of a radar
detector. (b) The spectrogram of the vehicle shown in Figure (a).
Figure 3.2 presents a flowchart of an algorithm for these two constraints. The
algorithm includes four phases, namely signal processing, calibration, learning and
„classification and speed estimation‟. The rectangles which are enclosed by a dashed line comprise four major phases: signal processing, calibration, learning and
„classification and speed estimation‟. After retrieving the radar signal, a high pass filter is applied to filter background clutter signals. Fast Fourier transformation is to get the
range profiles of vehicles on lanes. Then, a constant false alarm rate (CFAR) thresholds
are used to detect the presence of vehicles. If the calibrating work is needed, the video
calibrating system will be used to calibrate the virtual loop lengths. When the
calibrating job is finished, the vehicle profiles will be complemented by the range of
step is to extract nine features from the complemented vehicle profile. While the
training job has never been done before, these features will be saved in vehicle training
database. The category and length of vehicle, which is the output of video recognition
system, will be saved into training database, too. If the number of vehicles is bigger
than a threshold, SVM and SVR will finish the learning step. When the learning job is
done, SVM will use vehicle features to classify vehicle‟s category. Finally, SVR will
predict the length of vehicle and output the vehicle speed. The details of the algorithm
will be presented in following subsections. The pseudocode of algorithm is shown as
following.
Figure 3.2 The flowchart of the vehicle detection algorithm. Online training ?
Retrieve the signal High pass filter Fast Fourier transfer
CFAR detection
Feature Extraction
SVM Traning SVM classification
SVR regressing SVR predicting Vehicle training Database :
Category, Length, Features Video traning system
Vehicle > n ? Output vehicle
category
Output vehicle
speed Speed estimation
Stop training Range complement
Find vehicle profile
Virtual loop length Video calibrating system Online calibrating ? Stop calibrating Each lane OK ? no yes yes no no yes yes no Begin Calibration Signal processing Learning Classification
Void Vehicle_classifier_and_speed_estimation_algorithm() begin while true Signal_processing(); if need calibrating Calibrating(); endif if vehicle<n Feature_extracting(); endif if need training Learning() endif if training done Vehicle_classification_and_speed_estimation(); endif endwhile End void Signal_processing() begin
retrieve signal from system;
apply high pass filter; do fast Fourier transform;
find vehicle profile; end
void Calibrating() begin
for each lane of street
check vehicle in/out by vehicle profile and clutter-map CFAR threshold if vehicle-in
capture vehicle-in image from video endif
if vehicle-out
capture vehicle-out image from video
compute virtual loop length by vehicle-in-out images classify vehicle category by images
compute vehicle length by images compute speed
save above results into training database endif endfor end void Feature_extrating() begin if vehicle-out
compute square energy
compute sum,maximal, mean and mean square error of vehicle magnitude profile
compute vibration of vehicle profile compute square vibration
save all features into database endif
end
void Learning() begin
retrieve vehicle features from database
retrieve vehicle length, speed, type, and loop length from database do SVM training do SVR regression end void vehicle_classification_and_speed_estimation() begin do vehicle classification by SVM do vehicle length prediction by SVR estimate vehicle speed
Signal processing
Most of the signal processing is performed during this phase. A discrete signal
frame xt[n] is retrieved from the time domain during a pulse interval t. Each discrete
signal frame has 128 points (n=1..128), and there are a total of 1500 signal frames per
second (pulse repeating frequency =1500). Since noise and background clutter disturb
normal vehicle echo signals, a simple high pass filter H(z)=1-z-1 is used to cancel the
background clutter. The filtered signal yt[n] is shown in Eq. (3.1).
yt[n]=xt[n]-xt-1[n] (3.1)
Furthermore, the high pass filter can also emphasizethe moving of vehicles. Since
a high magnitude of some frequencies means that some vehicles present on some lanes,
fast Fourier transform (FFT) is performed on yt[n] to get the frequency domain data
Yt[n]. That is to say, when a vehicle is presented at distance 3*n meters at time t ,
|Yt[n]| is great than some threshold. To avoid false alarms of vehicle presence, the
clutter-map constant false alarm rate (CFAR) [44] technique is adopted. The basic
characteristic of clutter-map CFAR is that the false alarm probability remains
approximately constant in clutter by a dynamic threshold. Vehicles with an echo power
exceeding the threshold thus can still be detected. Eq. (3.2) shows the clutter-map
CFAR threshold for the range n during pulse t.
) ] [ ) 1 ( ] [ ( ] [n Y 1n Y 2n Tt t t (3.2) where α=2 and γ=0.9.
The final step in signal processing is to collect the vehicle profile Vt[m] presented
at m-th range bin Yt [m] during the time interval in which vehicle is presented on
detection area. All classification methods are based on the vehicle profile from which
features are extracted. Eq. (3.3) defines the profile of the vehicle signal. Each
magnitude of m-th range bin |Yt [m]| is multiplied by power k of range frequency fm to
compensate for the decay of received power.
Vt[m]= |Yt[m]|×fmk (3.3) (
where T1<t<T2 and T1 and T2 are the first and last detection times of a vehicle
which passes through the radar detection area.
Feature Extraction
Nine features need to be extracted from the vehicle profile, most of which are
based on the physical characteristics of the vehicle. First, the energy of the vehicle
profile is shown in Eq. (3.4). A large vehicle implies large RCS, which in turn means
high energy. Square energy is used to emphasize this characteristic. Other features are
obtained from the statistical parameters associated with the vehicle magnitude profile.
These features include the maximal, mean and mean square error for elements of Vt[m].
2 1 ) ( T T t t m V Energy (3.4)Another physical phenomenon of vehicles is the vibration of the vehicle profile.
Small vehicles have low vibration while large vehicles have high vibration. Eq. (3.5)
calculates vehicle vibration. To increase the weighting of these characteristics, the
and the energy is the same concept as doing mathematical integration. These features
of each vehicle profile form a point in the feature space.
| ) ( ) ( 1 2 1 m V -m |V Vibration t T T t t
(3.5)Learning and Classification
This section aims to identify a classifier for effectively classifying vehicles into
one of four categories: motorcycles, small, medium and large.
First, this study tries the K-means clustering (denoted as K-means). Here K-means
is used as a method of partitional clustering in which the numbers of clusters and
random centers are specified before starting the clustering process. The number of
clusters is set to four. An objective function is then defined as the sum of the square
distances between a point in a feature space and the nearest cluster centers. The standard
K-means procedure is then followed to minimize the objective function iteratively by
finding a new set of cluster centers. These cluster centers can reduce the value of the
objective function at each iteration. Here the maximal iteration is set to 10.
The next classifier is LDA, which is a supervisory classifier. LDA measures the
Mahalanobis distance between the group center and the LD project point of nine vehicle
features. The LDA then estimates the posterior probability of each group using
Mahalanobis distance, the testing vehicle belongs to the group with the highest
posterior.
The last classifier is SVM, which is also a supervisory classifier. SVM is a binary
classifier. The one-against-one strategy is developed to support multiple classifications
For k groups, the one-against-one strategy constructs k(k-1)/2 SVMs to separate each
pair of groups. This study tests SVM using the one-against-one approach, in which six
Prediction is performed by voting, where each classifier makes a prediction and the
most frequently predicted class wins (“Max Wins”). In cases where two groups receive an identical number of votes, this study simply selects the one with the smallest index.
For supervisory classifiers LDA and SVM, the environmental installation problem
leads to retraining of the classifier for each installation of radar sensors. To resolve the
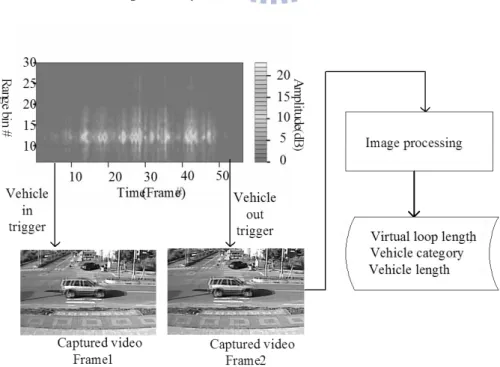
problem, this study proposes a learning method based on a video training system, as
shown in Figure 3.3. The system receives vehicle-in and vehicle-out triggers when a
vehicle is either inside or outside the detection area. After receiving the triggers, the
system captures two video frames. The image processing unit then outputs virtual loop
length, vehicle category and vehicle length. Using clutter-map CFAR, the radar system
can know the in and out time of a vehicle. When the radar system sends vehicle-in or
vehicle-out triggers to the video system, the video system immediately captures a video
frame. These two video frames can then be used to perform image processing to obtain
the vehicle type. The vehicle type and its features are saved in a training database which
can be used to train a supervisory classifier.
Calibration and speed estimation
In general, the radar speed detecting method is based on the Doppler principle.
When a radio wave bumps onto a tracked object, the radio wave is reflected, the
frequency and the amplitude of the reflective wave are influenced by the moving state
of the tracked object. If the tracked object is stable in its position, the frequency of the
reflective radio wave will not be changed and the Doppler effect will not be generated.
If the tracked object moves forward in the transmitted direction of the radio wave, the
frequency of the reflective radio wave will be increased; on the other hand, if the object
moves oppositely to the propagated direction of the radio wave, the frequency will be
decreased. As a result, the effects of the Doppler Shift are produced. However, the
Doppler effect is not obviously and stable for roadside fired Radar. It is almost zero
when vehicle pass through the detection zones. The RCS of vehicle is so complicated
such that equations 2.2-2.4 are not possible to be applied.
Hence, the vehicle speed is estimated using Eq. (3.6). The detection zone of each
lane forms a virtual loop. The key to correctly estimating the speed is to more precisely
calculate the three parameters of Eq. (3.6).
ΔT L L
Speed v z , (3.6) (
where Lv denotes the length of the vehicle, Lz represents the length of the
virtual loop and ΔT is the time of vehicle occupation.
It is easy to obtain the vehicle occupation time ΔT from clutter-map CFAR. The
length of the virtual loop Lzmust be carefully calibrated. The length of the virtual loop
is also an environmental installation problem. The length differs between environmental
installations. Theoretically, the virtual loop length can be obtained from radar equations,
![Figure 2.6 Shockwaves at an intersection [15].](https://thumb-ap.123doks.com/thumbv2/9libinfo/8752973.206256/25.892.170.740.127.712/figure-shockwaves-at-an-intersection.webp)