國 立 交 通 大 學
機械工程學系
碩 士 論 文
微磁性粒子操縱之力學探討理論研究
Manipulation of Micro-magnetic Particles Numerical Study
研 究 生:白杰民
指導教授:陳慶耀 博士
2
微磁性粒子操縱之力學探討理論研究
Manipulation of Micro-magnetic Particles Numerical Study
研 究 生 :白 杰 民 Student:Jay-Min Pai 指 導 教 授 :陳 慶 耀 Advisor:Ching-Yao Chen 國 立 交 通 大 學 機 械 工 程 學 系 碩 士 論 文 A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of The Requirements
for the Degree of Master of Science
in
Mechanical Engineering July 2011
Hsinchu, Taiwan, Republic of China
i
摘要
本文探討磁性粒子於不同型式磁場之下所產生的運動模式。利用物理方 程式及模擬解來計算影響運動模式的各種受力:包括因磁性流體中懸浮的 微米尺度大小之磁性粒子之順磁性質,將磁性流體置於隨時間改變之不同 大小以及不同方向的外加磁場下後,所產生之磁偶極力、粒子接觸面之間 的正向力及摩擦力、旋轉時所需的向心力還有在流體中移動所產生的阻力 等受力作分析。並使用商用軟體 FLUENT 來模擬磁性粒子串在旋轉磁場中 的行動模式,以計算磁性粒子於流體中所受到的流體阻力。在此之環境流 體為蒸餾水,在設定上採用二維及三維暫態層流和不可壓縮流模式來解 Navier-Stokes Equation,並利用 SIMPLE 法和移動網格來模擬暫態下變動的 流場:粒子串在流場中因為旋轉磁場而造成之旋轉、擺動等行為。ii
致謝
在這邊我要感謝我的家人在我的學業和研究上給了我相當大的鼓勵以 及支援,使得我能夠專心於我的研究之上。接下來要感謝陳慶耀老師,陳 老師不管在研究上或生活上均給了我許多相當實用的建議,因為陳老師的 努力,讓我加入複雜性流體實驗室後不管是在課業和生活上都十分的充實 與快樂。 在碩士班的兩年中,研究上所遇到的問題能迎刃而解也得感謝實驗室中 的同窗好友 世聰、文良、國安以及已經畢業的宏元、奇軒、詒翔、佳芬、 啟鳴、柏瑋等學長姐在我剛進實驗室的時候給了我許多的建議,讓我能夠 在研究上和生活上能夠適應碩士班的生活。博士班的學長姐 琦雯、裕盛、 聖焱、彥宏、程雄、鴻筠 也常分享他們的經驗給我,讓我能夠順利的完成 研究,並能以更好的方法表達出來,也要感謝實驗室的學弟 彥志、定弘、 隆福、育辰在我們忙碌時的貼心舉動,讓我們可以專心於研究上。 最後要再次感謝實驗室全體同學的協助,在生活上都能感受到和樂融融 的氣氛,各位同學在不同領域上的研究也讓我們有不同的觀點,這讓實驗 室中各個同學都能有更多元化的發展。iii
目錄
摘要 ... i 致謝 ... ii 目錄 ... iii 圖目錄 ... v 第一章: ... v 第二章: ... v 第三章: ... v 第四章: ... vi 符號說明 ... x 第一章 緒論 ... 1 1.1 前言 ... 1 1.2 文獻回顧 ... 3 1.3 研究目的及動機 ... 5 第二章 物理模型 ... 9 2.1 物理模型 ... 9 2.2 受力分析 ... 9 2.2.1 徑向分力 ... 11 2.2.2 切線方向分力 ... 12iv 2.3 形變分析 ... 15 2.4 斷裂分析 ... 17 第三章 數值方法 ... 21 3.1 前言 ... 21 3.2 方法驗證 ... 23 3.3 移動網格 ... 24 3.3.1 移動網格守恆方程式 ... 24 3.3.2 移動網格之網格重建方法 ... 26 3.4 滑移網格 ... 27 第四章 初步模擬結果與分析 ... 32 4.1 模擬結果之分析與比較 ... 32 4.1.1 二維模擬結果 ... 32 4.1.2 三維模擬結果 ... 37 第五章 結論與未來方向 ... 70 5.1 結論 ... 70 5.2 未來方向 ... 71 參考文獻 ... 72
v
圖目錄
第一章: 圖 1- 1 熱磁對流效應示意圖 ... 6 圖 1- 2 喇叭結構圖 ... 6 圖 1- 3 微游泳器行動示意圖 ... 7 圖 1- 4 利用聚乙烯醇(PVA)與磁性流體合成的穿透式電子顯微鏡 (TEM)圖 ... 7 圖 1- 5 為各種 Mason Number 下的混和狀態。 ... 8 第二章: 圖 2- 1 磁性粒子串受力示意圖 ... 18 圖 2- 2 磁性粒子直流電串接後示意圖 ... 18 圖 2- 3 流場邊界條件示意圖 ... 19 圖 2- 4 流體阻力計算方法示意圖 ... 19 圖 2- 5 粒子串所受內力矩分析 ... 20 第三章: 圖 3- 1 模擬計算流程圖 ... 28 圖 3- 2 Stokes Flow 所使用網格與流場速度分布圖 ... 29vi 圖 3- 3 移動網格之彈簧平滑模型示意圖 ... 30 圖 3- 4 移動網格之層模型示意圖 ... 30 圖 3- 5 移動網格之部分網格重新劃分模型示意圖 ... 31 圖 3- 6 網格畸變率的定義中的網格體積及最佳網格體積示意圖 . 31 第四章: 圖 4- 1 流場之基本狀態 ... 44 圖 4- 2 二維 15 顆粒子串所使用之網格 ... 44 圖 4- 3 二維 15 顆粒子串流場在時間 T=0.1 sec ~ 0.5 sec 中壓力分布 圖 ... 45 圖 4- 4 二維 15 顆粒子串所受之徑向磁偶極力... 45 圖 4- 5 二維 15 顆粒子串所受之向心力 ... 46 圖 4- 6 二維 15 顆粒子串所受之正向力 ... 46 圖 4- 7 二維 15 顆粒子串所受之流體阻力 ... 47 圖 4- 8 二維 15 顆粒子於 t=0.26 sec 時所受之流體阻力 ... 47 圖 4- 9 二維 15 顆粒子於 t=0.26 sec 時流體阻力所造成角加速度變化 ... 48 圖 4- 10 二維 15 顆粒子於 t=0.26 sec 時流體阻力所造成粒子於鄰近 粒子的角加速度差 ... 48 圖 4- 11 15 顆粒子串最大擺動角度 64.107°時,粒子串斷裂瞬間截圖。
vii ... 49 圖 4- 12 二維 20 顆粒子串所使用之網格 ... 50 圖 4- 13 二維 20 顆粒子串流場在時間 T=0.1 sec ~ 0.5 sec 壓力分布 圖 ... 50 圖 4- 14 二維 20 顆粒子串所受之徑向磁偶極力 ... 51 圖 4- 15 二維 20 顆粒子串所受之向心力 ... 51 圖 4- 16 二維 20 顆粒子串所受之正向力 ... 52 圖 4- 17 二維 20 顆粒子串所受之流體阻力 ... 52 圖 4- 18 二維 20 顆粒子串於 t=0.26 sec 時所受之流體阻力 ... 53 圖 4- 19 二維 20 顆粒子串於 t=0.26 sec 時流體阻力造成角加速度變 化 ... 53 圖 4- 20 二維 20 顆粒子於 t=0.26 sec 時流體阻力所造成粒子於鄰近 粒子的角加速度差 ... 54 圖 4- 21 20 顆粒子串最大擺動角度 73.161°時,粒子串斷裂瞬間截圖。 ... 54 圖 4- 22 三維 11 顆粒子串所使用之網格 ... 55 圖 4- 23 三維 11 顆粒子串流場(Z=0)於時間 T=0.1 sec ~0.5 sec 之壓力 分布圖 ... 55 圖 4- 24 三維 11 顆粒子串所受之徑向磁偶極力 ... 56 圖 4- 25 三維 11 顆粒子串所受之向心力 ... 56
viii 圖 4- 26 三維 11 顆粒子串所受之正向力 ... 57 圖 4- 27 三維 11 顆粒子串所受之流體阻力 ... 57 圖 4- 28 三維 11 顆粒子串於 t=0.26 sec 時所受之流體阻力 ... 58 圖 4- 29 三維 11 顆粒子串於 t=0.26 sec 時流體阻力造成角加速度變 化 ... 58 圖 4- 30 三維 11 顆粒子串於 t=0.26 sec 時流體阻力所造成粒子於鄰 近粒子的角加速度差 ... 59 圖 4- 31 11 顆粒子串最大擺動角度 76.001°時,粒子串斷裂瞬間截圖。 ... 59 圖 4- 32 三維 15 顆粒子串所使用之網格 ... 60 圖 4- 33 三維 15 顆粒子串流場(Z=0)於時間 T=0.1 sec ~0.5 sec 之壓力 分布圖 ... 60 圖 4- 34 三維 15 顆粒子串所受之徑向磁偶極力 ... 61 圖 4- 35 三維 15 顆粒子串所受之向心力 ... 61 圖 4- 36 三維 15 顆粒子串所受之正向力 ... 62 圖 4- 37 三維 15 顆粒子串所受之流體阻力 ... 62 圖 4- 38 三維 15 顆粒子串於 t=0.26 sec 時所受之流體阻力 ... 63 圖 4- 39 三維 15 顆粒子串於 t=0.26 sec 時流體阻力造成角加速度變 化 ... 63 圖 4- 40 三維 15 顆粒子串於 t=0.26 sec 時流體阻力所造成粒子於鄰
ix 近粒子的角加速度差 ... 64 圖 4- 41 15 顆粒子串最大擺動角度 64.107°時,粒子串斷裂瞬間截圖。 ... 64 圖 4- 42 三維 20 顆粒子串所使用之網格 ... 65 圖 4- 43 三維 20 顆粒子串流場(Z=0)於時間 T=0.1 sec ~0.5 sec 之壓力 分布圖 ... 65 圖 4- 44 三維 20 顆粒子串所受之徑向磁偶極力 ... 66 圖 4- 45 三維 20 顆粒子串所受之向心力 ... 66 圖 4- 46 三維 20 顆粒子串所受之正向力 ... 67 圖 4- 47 三維 20 顆粒子串所受之流體阻力 ... 67 圖 4- 48 三維 20 顆粒子串於 t=0.26 sec 時所受之流體阻力 ... 68 圖 4- 49 三維 20 顆粒子串於 t=0.26 sec 時流體阻力造成角加速度變 化 ... 68 圖 4- 50 三維 20 顆粒子串於 t=0.26 sec 時流體阻力所造成粒子於鄰 近粒子的角加速度差 ... 69 圖 4- 51 20 顆粒子串最大擺動角度 73.161°時,粒子串斷裂瞬間截圖。 ... 69
x
符號說明
磁偶極矩 磁偶極 粒子半徑 磁化率 外加磁場 真空中之磁導率 溶劑之磁導率 形狀阻力 摩擦阻力 靜壓 剪應力 流體阻力 流體密度 流體黏滯係數 流體速度 應力張量 相關變數xi 相對速度 局部速度 擴散係數 來源係數 對流項 幾何因子 P 到 N 之向量 面擴散係數 通過面 j 和 的質通量 移動網格的網格速度 擴散係數 來源項 控制體積 的邊界 面 j 的面積向量 控制體積面 j 在 的時間中所掃過的體積 粒子串擺動之最大角度 粒子串擺動頻率 第 N 顆粒子所受之磁偶極力 k 粒子串之總粒子數
xii 代表第 N 顆粒子所受之向心力 M 粒子之質量 r 粒子質心和旋轉半徑之間的距離 旋轉之角速度 粒子之密度 第 N 顆粒子及第 N+1 顆粒子之間之正向力 力矩 轉動慣量 角加速度 慣性力 摩擦力 最大靜摩擦係數
1
第一章 緒論
1.1 前言
磁性流體(Ferrofluid)為一種人工製成之智慧型流體,是於無磁性溶 劑中加入多數體積質量相等(直徑為微米尺度或者奈米尺度大小)的順 磁性固體粒子所製成的,並利用粒子為順磁性之特性以及不同型態之 外加磁場以改變粒子在溶劑中的排列狀態以及運動模式。磁性流體因 為上述的組成所以只要外加磁場就會產生可以承受劇烈的運動、近乎 完全的可逆性,因此常運用於先進生物技術或者微奈米之機械系統。 磁性流體的發展主要是從 1969 年由美國航空太空總署(NASA)的 Papell[1]發明,是以鐵磁礦(Magnetite)與表面活性劑結合,經由研磨形 成超微顆粒(粒徑在 10 nm 以下),並將表面活性劑包覆於顆粒表面,使 磁性顆粒分散於溶媒中,形成奈米級之磁性流體。 磁性液體也可用於增加熱磁對流效應[2]的影響,由於磁性粒子受磁 場影響,所以我們可以利用改變磁場來改變流場的形式及狀態,進而 改變熱對流之效果,最終達到改變散熱功率的成果。圖 1-1 即是熱磁對 流效果的示意圖。 利用磁性液體可利用磁場來改變流體之黏滯度這特性,即發展出利 用磁性液體來當作阻尼[3]的方法,如圖 1-2 即是在喇叭中利用磁性流 體來扮演阻尼之角色,並利用兩側的磁鐵來控制。 在應用上,由於粒子在不同磁場下會產生不同的行動,所以就產生 了兩種主流的使用方法:利用磁場操縱磁性粒子以及利用磁場操縱磁2 性粒子,進而操作溶液的行動。利用磁場操作磁性粒子常應用於仿生 機構的驅動[4]或藥物的輸送[5],見圖 1-3、圖 1-4。而利用磁場進而操 作溶液的方法則用於控制太空船的角動量,以控制太空船旋轉等姿勢 控制等方面。 而本文中所要探討的則是上述利用磁場操縱磁性粒子運動的部分。 磁性粒子在外加直流電磁場後會形成鏈狀的粒子串,再施加另一方向 與直流電磁場垂直之交流電磁場,如此即可產生一讓粒子串擺動之磁 場,文中主要是探討二維及三維流場中磁性粒子串擺動之機制,並利 用商業軟體及物理模型來分析微米級磁性粒子串的運動及受力,希望 能在微磁性粒子操控上能建立一套完整的理論架構。
3
1.2 文獻回顧
本文著重於微磁性粒子之運動模式及受力形態,所以於文獻回顧部 分著重於微磁性粒子之力學運動機制發展以及近期之研究發展。
隨 著 半 導 體 製 程 技 術 之 突 飛 猛 進 , 微 機 電 系 統 (Micro Electro Mechanical Systems, MEMS)技術也可達到實驗室晶片(Lab-on-a-Chip) 的程度,因此磁性液體也被拿來與半導體製程技術做結合。
A.Ghanbari 等 人 [6] 則 研 究 了 利 用 磁 場 來 控 制 微 游 泳 器 (Micro Swimmer)的行動,並分析其游動時功率、外型等因素。主要是利用於 微小侵入式手術、區域性藥物傳遞等地方。
Tae Gon Kang 等人[7]則是模擬旋轉磁場使粒子串旋轉,以達微機 電系統中之微攪拌器之效果,並測試不同的 Mason number 來比較不同 流體混合之效率。見圖 1-5,可以看出不同流體混合之狀態。
Sonia 等人[8]則是對磁性粒子之磁偶極對磁偶極之吸引力做了解釋: 影響吸引力之磁偶極矩 可表為下式
4 磁化磁性粒子之外加磁場 、粒子之磁化率 及粒子之半徑 為影響 磁偶極矩之因素,而磁偶極對磁偶極之吸引力在 Sonia 等人[8]之簡化 下可表示為 (1-2) 在此假設兩粒子之中心連線與磁場之夾角 為 ,也就是無相位 差,即可把(式 1-2)簡化成: (1-3) 在此 為真空中之磁導率, 為溶劑之磁導率。 而對於在流場中的阻力,TACHIBANA 等人[9]將流場中圓柱體的 流體阻力 以靜壓 及剪應力 之函數表示出來: (1-4) (1-5) (1-6) 在此代表形狀阻力, 在此代表摩擦阻力。
5
1.3 研究目的及動機
在研究旋轉磁場之微磁性粒子運動中,了解粒子之運動型態以及受 力是很重要的問題,Mason Number 的比較等都是在探討磁偶極力與流 體阻力之間的關係。所以本文中以各種力學基礎及計算流體力學 (Computational Fluid Dynamics)來模擬空間中的流場變化,並以此作為 基礎來計算磁性粒子所受之各種力來做比較,並以力學上的角度切入 並探討磁性粒子串運動及斷裂的情形。
由於在文中大多數的情況下,粒子串中各粒子是連接在一起,所以 在此不是直接使用由自由流速(Free Stream Velocity)所求出來的阻力來 計算粒子串上各粒子所受到之阻力,而是利用商用軟體 FLUENT 模擬 出粒子表面的靜壓和剪應力來求出粒子所受到的阻力。 本文研究目的在於利用商用軟體 FLUENT 來模擬二維及三維流場 中磁性粒子之運動,並分析所受到的磁偶極力、正向力、向心力、流 體阻力及摩擦力等五種力。並與實驗結果做比較,並預測可能的斷裂 位置以及最大擺動角度,以便利用磁性流體來製作微米級機構(微攪拌 器等)之參考及應用。
6
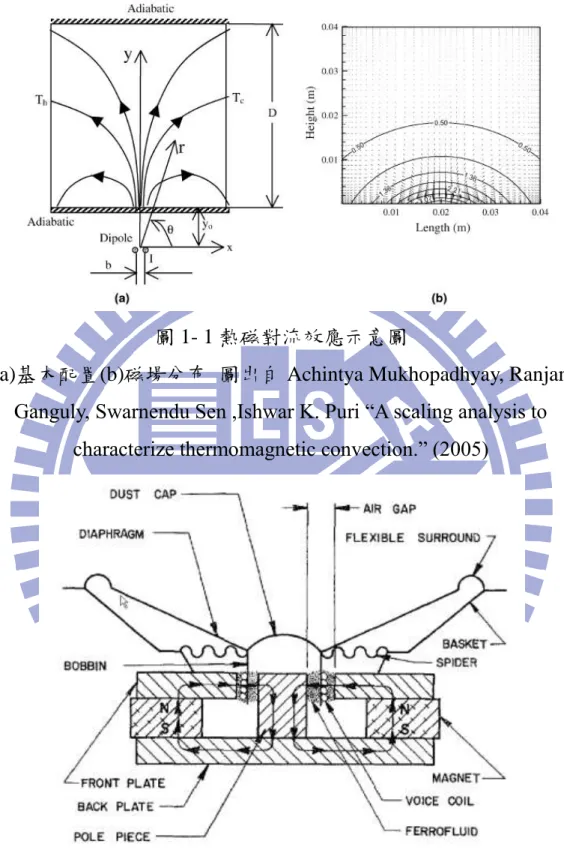
圖 1- 1 熱磁對流效應示意圖
(a)基本配置(b)磁場分布 圖出自 Achintya Mukhopadhyay, Ranjan Ganguly, Swarnendu Sen ,Ishwar K. Puri “A scaling analysis to
characterize thermomagnetic convection.” (2005)
圖 1- 2 喇叭結構圖
利用了磁性流體來扮演阻尼的角色 圖出自 K. Raj and R. Moskowitzn “A REVIEW OF DAMPING APPLICATIONS OF FERROFLUIDS”
7
圖 1- 3 微游泳器行動示意圖
利用外加磁場 來控制微游泳器行動其行動 圖出自 Erik Gauger1 and Holger Stark” Numerical study of a microscopic
artificial swimmer” (2006)
圖 1- 4 利用聚乙烯醇(PVA)與磁性流體合成的穿透式電子顯微鏡(TEM) 圖
圖出自 Suprabha Nayar, Aparna Mir, Aarti Ashok, Avijit Guha and Vikas Sharma” Bovine Serum Albumin Binding and Drug Delivery Studies with
8
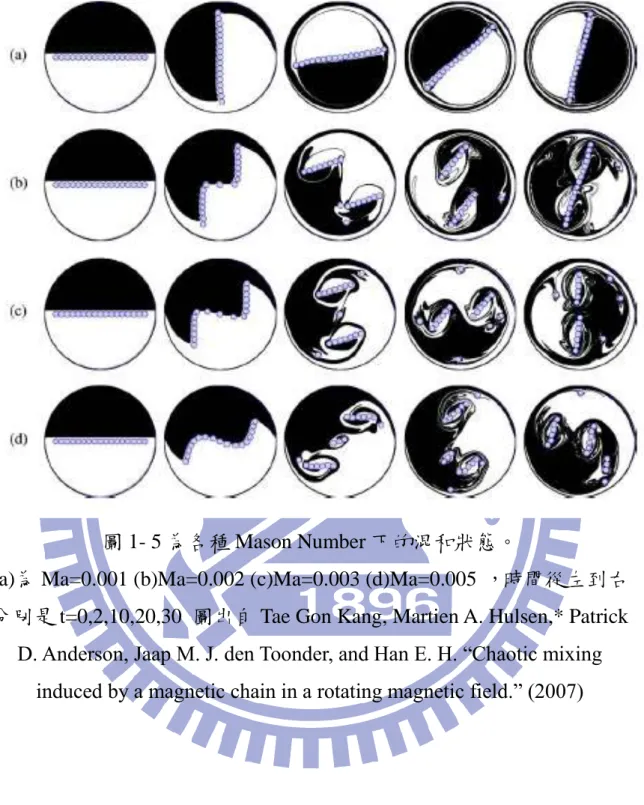
圖 1- 5 為各種 Mason Number 下的混和狀態。
(a)為 Ma=0.001 (b)Ma=0.002 (c)Ma=0.003 (d)Ma=0.005 ,時間從左到右 分別是 t=0,2,10,20,30 圖出自 Tae Gon Kang, Martien A. Hulsen,* Patrick
D. Anderson, Jaap M. J. den Toonder, and Han E. H. “Chaotic mixing induced by a magnetic chain in a rotating magnetic field.” (2007)
9
第二章 物理模型
2.1 物理模型
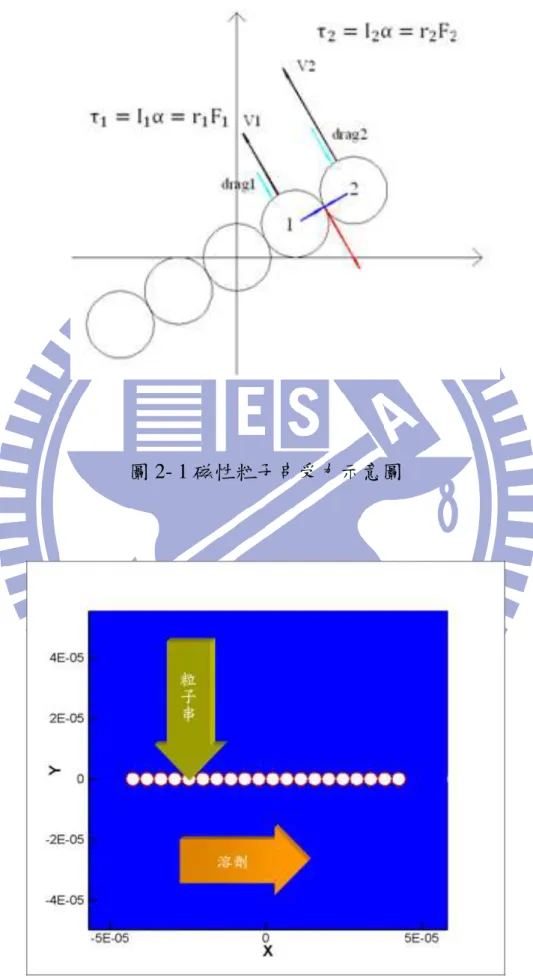
磁性液滴主要是以溶劑以及順磁性固體粒子所組成。在磁性液 滴上外加直流電所形成的磁場後,即可將分布於溶劑中的固體粒子 串成鏈狀,之後再外加不同大小並與直流電方向垂直的交流電磁場 後即可使粒子串有各種不同的行動模式。 本 文 所 使 用 的 溶 劑 為 蒸 餾 水 , 順 磁 性 固 體 粒 子 則 是 使 用 Dynabeads M-450 Epoxy,並使用直流電源做為串接磁場、交流電 源來形成週期性磁場,以操縱磁粒子串形成擺動之運動。 本文主要是分析及預測二維及三維磁性粒子串於各種行動模 式下之斷裂位置,並比較在不同最大角度、粒子串長度對粒子串之 影響。2.2 受力分析
粒子串在受磁力操作而擺動時,其受力可分成兩類:徑向以及 切線方向兩種。而徑向上的力有:因磁場磁化磁性粒子所產生的磁 偶極力、粒子接觸時所產生的正向力以及維持旋轉運動所需要的向 心力三種。而切線方向的則是在流場中運動所產生的流體阻力以及 物體接觸所產生的摩擦力這兩種。見圖 2-1。10 本文中主要分析的粒子串運動模式為擺動,粒子串擺動之角速度的 函數可表示成下式: (2-1) 代表粒子串擺動之角速度 代表粒子串之最大擺動角度 代表粒子串擺動頻率 在此我們做了下列幾項假設來簡化物理模型的分析: 1.粒子串擺動時不會發生粒子串外型的改變。 2.粒子串擺動時其擺動之運動模式與磁場相同,粒子串與磁場之間 沒有相位差。 3.在接下來物理模型分析時,以粒子串外型的軸為新的座標軸,以 此省略粒子串慣性的影響。
11
2.2.1 徑向分力
在本段落中將會分析粒子串所受到的徑向分力:粒子串所受之徑向 磁偶極力、維持粒子作旋轉運動之向心力以及粒子接觸時所產生之正 向力三種。 首先是粒子串所受到之徑向磁偶極力。在 1-3 式當中,可以求得兩 顆粒子之間所產生的磁偶極力,而粒子串中粒子所受之總磁偶極力則 是將一顆一顆的磁偶極力加總起來,因此可得下式: (2-2) 在此 代表第 N 顆粒子所受之磁偶極力、 k 代表粒子串之總粒子 數、 代表真空中的磁導率、 代表溶劑的磁導率、m 代表磁偶極 矩、d 代表粒子之直徑。 而向心力是為了維持物體做旋轉運動的力,可表示如下: (2-3) FRN 代表第 N 顆粒子所受之向心力、M 代表磁性粒子之質量、r 代表粒 子質心和粒子旋轉中心之間的距離、 0代表粒子串旋轉之角速度、 p代 表磁性粒子之密度。 最後則是粒子所受之正向力。正向力是物體接觸後所產生的力,因 此只產生於面上,而在這邊可以表示成:12 FN 1N ko N 1 FoD ko N 1F Ro (2-4) 在這裡FNN 1代表在第 N 顆粒子及第 N+1 顆粒子之間的接觸面所產 生之正向力。
2.2.2 切線方向分力
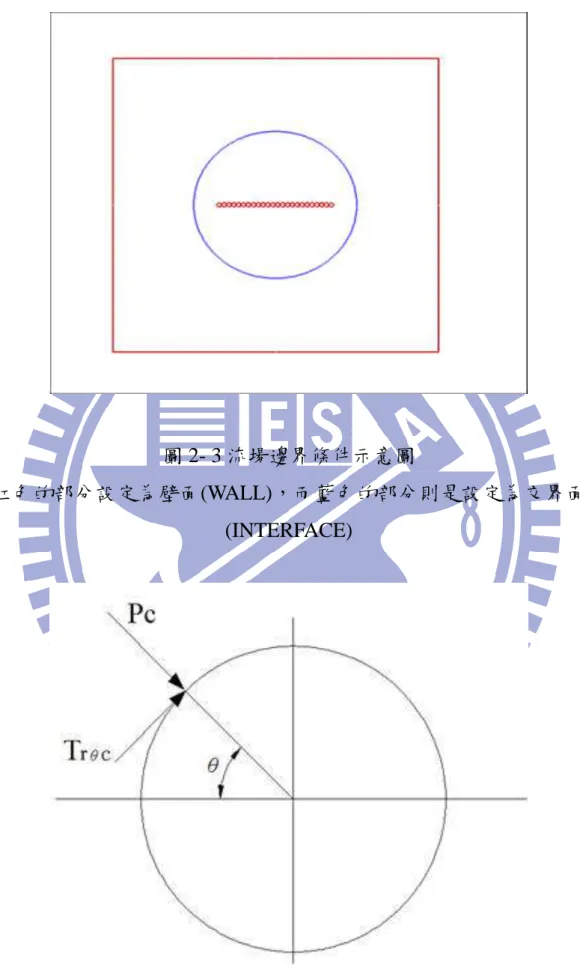
本段落則是以分析粒子串中粒子所受之切線方向分力為主。在 此粒子串所受之切線方向分力主要為粒子所受到之流體阻力以及 粒子接觸時所產生之摩擦力。 首先是粒子所受到的流體阻力,本文是利用商用軟體 FLUENT 來模擬流場,在此先介紹流場模擬時之分析假設以及統御方程式。 並利用模擬所得出之流場靜壓以及剪應力來計算粒子串所受之流 體阻力。 在此為了方便分析磁性粒子於流場中之行為,我們做了下列幾 項假設: (1) 假設我們使用之蒸餾水為不可壓縮流體(incompressible fluid)及 牛頓性流體(Newtonian fluid),且其密度為 998 2 kg m3 、黏滯 係數 0 001003 kg m s (2) 流體和固體之邊界滿足無滑移條件(No-slip Condition) (3) 流場狀況為層流 (Laminar Flow)13 流體之統御方程式則有連續方程式及動量方程式兩種: [1]連續方程式: t V 0 (2-5) [2]動量方程式: V V V p (2-6) 上式之 為應力張量(Stress tensor) 可表示如下: V V T (2-7) 於本模擬中,我們利用直流電來維持粒子串的形狀,交流電則是來 控制粒子串的行動,而我們為了簡化模擬流程在此假設粒子串的形狀 為固定的,見圖 2-2,並使用實驗所做出來的結果來做比較。利用實驗 所得出來的最大角度和頻率可以模擬粒子串的擺動模式,以簡化粒子 串形狀變化的變因。 本文中模擬之流場著重於觀察區域中粒子串擺動的行為。首先將直 流電打開,使得粒子連成一串。此為起始狀態之粒子串,見圖 2-3。當 開啟交流電時,粒子串開始擺動,流場即開始變化。以下介紹使用到 的邊界類型: (1) 固體邊界(Wall) 在最外面的方型壁面及粒子串之面均是使用此類型的邊界,
14 以無滑移邊界(no-slip Condition)來做計算。 (2) 交界面(Interface) 為了減少移動網格改變的網格數,使用交界面來劃分網格重 劃區以及非重劃網格的區域。 在此使用 FLUENT 所模擬出來的結果進行運算:首先將粒子分成 左右半面(見圖 2-4),左右半面上的網格數分別為 m、n,再將由模擬所 得的各網格上的靜壓PC取阻力方向之分量後相加起來再分別除以左右 兩面的網格數 m、n,最後在乘上表面積即為切線方向之形狀阻力。而 將模擬所得的各網格上的剪應力Tr C取阻力方向之分量後相加起來再 除以各面的網格數 m、n,最後再乘上表面積即為切線方向之黏滯阻力。 可表示成下式: FDP PCcos P A 2m PCcos P A 2n (2-8) FDF Tr Csin P A 2m Tr Csin P A 2n (2-9) 上式FDP代表形狀阻力、FDF代表黏滯阻力、P_A 代表粒子表面積。 摩擦力之產生是因為磁性粒子互相接觸所產生的力。在此也可以將 摩擦力當成抵抗外力所造成形變的力。粒子串在斷裂時所產生的最大 淨摩擦力之大小主要是由正向力來決定: FF K FNN 1 (2-10) FF代表摩擦力,K代表最大靜摩擦係數,FNN 1代表第N+1顆粒子和
15 第N顆粒子之間的正向力。
2.3 形變分析
由於粒子串在切線方向上的變化是以旋轉軸為軸心,而且粒子 串所受之流體阻力是會隨時間所變化的,所以在形變分析上需要由 時間 t 和 t+ Δ t 這兩時間下對角速度來做分析。 在時間 t 時: 粒子 1 與粒子 2 之速度可表示為下式: V1 t r1 0 (2-11) V2 t r2 0 (2-12) 而在時間 t + Δ t 時: 粒子 1 與粒子 2 之速度受流體阻力所造成角加速度影響,流體阻力 所造成角加速度可表示成下式: Drag r FDrag I (2-13)FDrag代表流體阻力、FF代表摩擦力、I 代表轉動慣量、 Drag代 表流體阻力造成的角加速度。而每顆粒子之轉動慣量可表示成下 式: I 2 5Ma 2 Mr2 (2-14) 在此 M 代表粒子質量、a 代表粒子半徑、r 代表粒子質心至旋轉中 心之距離。
16 所以在此粒子 1 與粒子 2 之速度可表示成: V1 t Δt r1 0 Drag 1 Δt (2-15) V2 t Δt r2 0 Drag 2 Δt (2-16) 在此決定粒子 1 和粒子 2 之間是否有相對位移的是V1 t 與V2 t 之比值, 當V1 t Δt 和V2 t Δt 之比值與V1 t 與V2 t 之比值相等時,2 粒子 之間不會有阻力造成之相對位移。在此先做簡化: VV1 t 2 t r1 0 r2 0 V1 t Δt V2 t Δt r1 0 Drag 1 Δt r2 0 Drag 2 Δt (2-17) 簡化後可得到當 Drag 1 = Drag 2 時,兩粒子之間不會有因阻力所產生之 相對位移。
17
2.4 斷裂分析
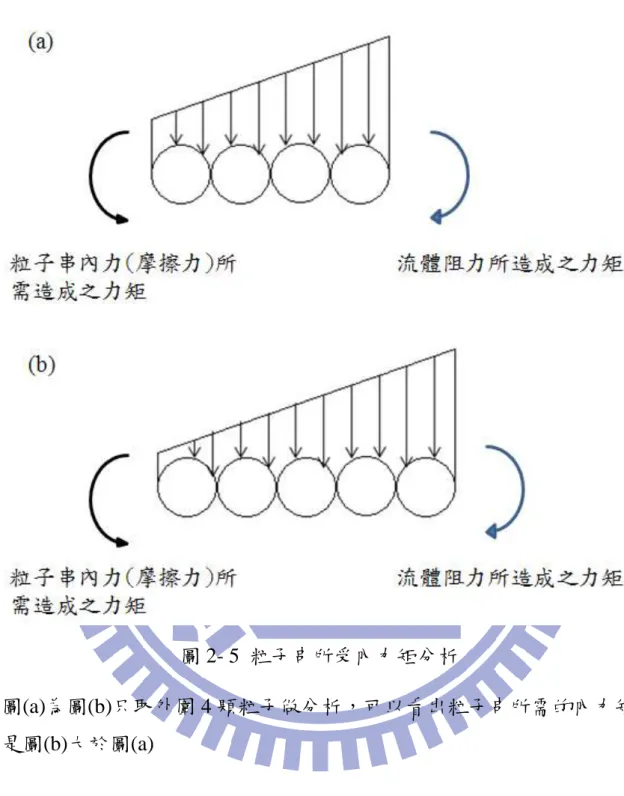
粒子串在受流體阻力影響下,有可能會發生前小節所討論的粒 子串形變,但形變至某種程度後,粒子串則會產生斷裂的情形,本 小節就是要討論粒子串的斷裂原因。 粒子串在此受流體阻力影響,可以約略表示成圖 2-5 所示,在 此因流體阻力會受轉動慣量影響才能夠對粒子串做出切線方向的 斷裂,所以在此均是使用流體阻力所造成之角加速度來分析,在圖 中可看到,圖(a)的粒子串因流體阻力所造成之力矩較圖(b)的流體 阻力所造成之力矩小,所以同樣的粒子串所需的內力矩也比較小, 也就代表圖(a)的粒子截面比起圖(b)的粒子截面較難斷裂。所以可 以看出,在粒子串所需要內力矩最大的地方,也就是流體阻力所造 成角加速度所產生力矩最大的地方會比較容易產生斷裂的情況。 所以同樣可以得知,因為粒子串受到流體阻力之積分為流體阻 力所造成之力矩,所以在粒子串受到流體阻力所產生之角加速度差 值最小的地方會有角加速度所產生力矩最大的情形產生,所以在此 我們斷裂分析主要是探討粒子串所受流體阻力所產生之角加速度 差值最小的地方。18
圖 2- 1 磁性粒子串受力示意圖
19
圖 2- 3 流場邊界條件示意圖
紅色的部分設定為壁面(WALL),而藍色的部分則是設定為交界面 (INTERFACE)
20
圖 2- 5 粒子串所受內力矩分析
圖(a)為圖(b)只取外圍 4 顆粒子做分析,可以看出粒子串所需的內力矩 是圖(b)大於圖(a)
21
第三章 數值方法
3.1 前言
本文是利用數值方法來模擬磁性粒子受磁場操縱行動模式後以簡 化其受所受之流體阻力,在此採用計算流體力學(CFD)模擬平台
FLUENT 作為基礎,在層流(Laminar Flow)和不可壓縮流(Incompressible Flow)狀態下求解二維暫態之連續方程式和動量方程式,並利用 SIMPLE 法來計算暫態流場,在移動邊界的部分採用移動網格來處理。 計算程序如圖 3-1。 有限體積法的守恆方程式(conservation equation)可表示如下: x div V r grad S (3-1) 其中V r V V c為流體速度V 與局部速度V c之相對速度, 為任意相關 變數, 和S 分別為擴散係數(diffusion)和來源係數(source)。 將(3-1)式積分後可得: d dt dVVp Vj Sj r grad dS SV dV (3-2) 根據(3-2)式,對各項作離散: 1.擴散項(diffusion terms) TDiffusion Vj r S j j grad S j Cj j Dj j (3-3)
22 擴散項用中點近似法可下列來表示: Dj j fjl N P grad S fjlgrad d PN j (3-4) 其中fj為幾何因子,d PN為 P 到 N 之向量, j為面擴散係數。 2.來源項(Source Term) TSource s1 s2 P (3-5) 3. 對流項(Convection Term)
對流項以 Upwind Differencing Scheme 處理,根據(3-3)式的推 導,對流項可由下列表示: CjUD Fj P Fj N Fj (3-6) 其中 Fj V S r j (3-7) Fj為通過面 j 和 j的質通量,輔助值 和 可由內插法得到。 總和上述,(3-2)式可表示成: V n V 0 t Fj 0 (3-8)
23 或 AP Pn Am m mn s1 BP Po (3-9) 和 AP Am m mn s2 BP (3-10)
3.2 方法驗證
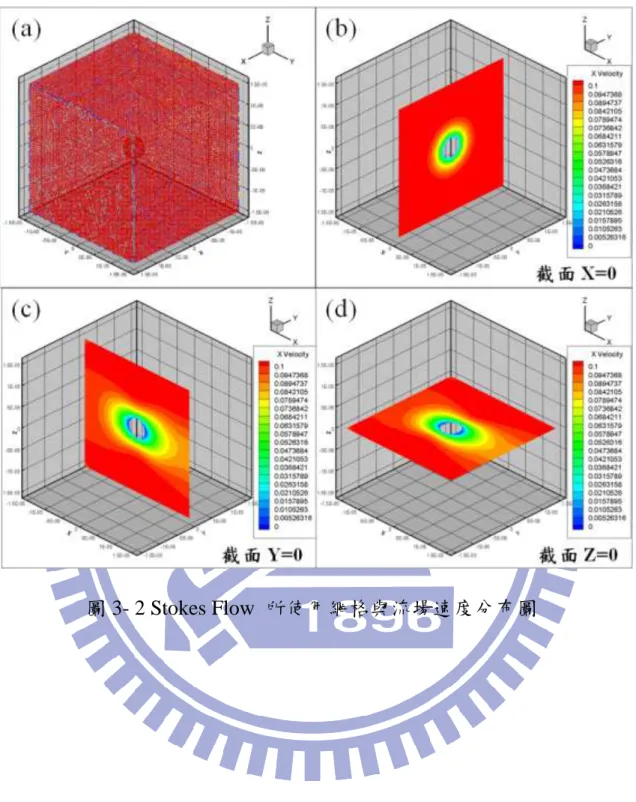
在此為了要確認 Fluent 所模擬出來流場之精確度,在此利用 Stokes Flow 來做驗證,並利用式(2-8)、式(2-9)所求出之之流體阻力來比較阻 力係數之數值解與解析解之間的誤差。 在此建立一 Stokes Flow 流場,流場參數如下: 流體密度=998.2 kg/m3 粒子直徑=4.5*10-6 m 流體之黏滯度=0.001003 kg/(m*sec) 進口速度=1 m/s (X 方向) 所使用的網格可從圖(3-2)中的圖 a 看出,流場之 X 方向速度則可 從圖(3-2)中的圖 b、c、d 中看出。在此我們將 Fluent 所模擬出的靜壓 以及剪應力輸出並代入式(2-8)、式(2-9)加以運算來求得流體阻力。並 利用所求出的流體阻力來計算阻力係數並跟解析解之阻力係數做比 較。 阻力係數之解析解可從下式得之:24 CD 24 Re (3-11) 在此流場之雷諾數 Re=4.478 ,代入式(3-11)後可求得解析解之阻力 係數為 5.36。 而數值解之阻力係數則是由式(3-12)中求得: CD 2FDrag V2A (3-12) 在此FDrag代表粒子所受之流體阻力、 代表流體密度、V 代表流體 和粒子間之相對速度,A 代表參考面積,在此球體之參考面積為 r2。 各項參數代入後可求得數值方法所計算出來的阻力係數為 5.59,所 以算出解析解阻力係數的誤差約為 4.11%。
3.3 移動網格
移動網格(Dynamic Mesh)乃是商用軟體 FLUENT 中一種處理動態 邊界以及動態網格的方法。像是邊界的移動、形變等均可使用。因此 這種方法常使用在輪葉泵(Vane pump)、活塞、飛機上的活動襟翼等地 方。
3.3.1 移動網格守恆方程式
在任意一個控制體積下,不因座標軸所改變的物理量 的基本守恆 方程式如下:25 d dt dVV V V u dAg dA V SV dV(3-13) 上式中 為流體密度,V 為速度向量,u 為移動網格的網格速度, 為g 擴散係數,S 為來源項, V為控制體積V的邊界。 在(3-11)式中的時間一次微分項可以以一階前向差分 (first-order forward difference)來表示: d dt dVV V n V n 1 Δt (3-14) 其中 n 和 n+1 代表不同的時間,而 n+1 時的 V 用下式來做計算 Vn 1 Vn dVdt Δt (3-15) 上式中 dV dt 是控制體積的時間導數。根據網格守恆定律,控制體積 的時間導數可由下式來得出: dV dt u V dAg u Ag j j nf j (3-16) 式中是nf控制體積的面網格數,A 為面 j 的面積向量。 j 而u 和Ag j 則可以表示成 j u Ag j j Vj Δt (3-17) Vj為控制體積面 j 在Δt的時間中所掃過的體積。
26
3.3.2 移動網格之網格重建方法
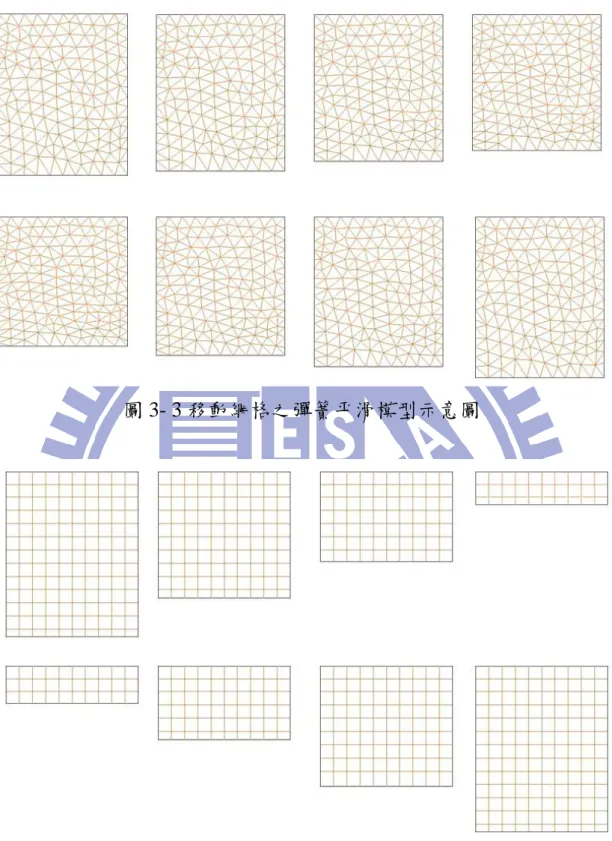
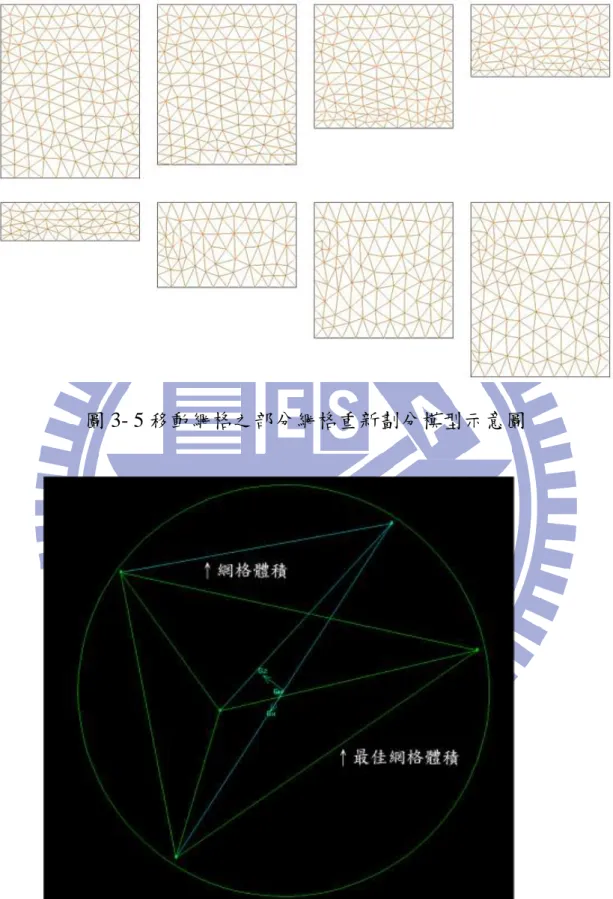
移動網格在計算時,是隨著邊界移動來更新網格的大小及 外型。而判斷其改變的方法主要共有三種:彈簧平滑模型 (Spring Smoothing)、層模型(Layering)以及部分網格重新劃分模 型(Local Remeshing)這三種。 首先是彈簧平滑模型(Spring Smoothing)的部分。彈簧平滑 模型的網格變化方式就像彈簧的伸縮一樣,如圖 3-2 所示。這 種方法的優點在於在物體移動的時候網格的連續性是沒有變 化的,且可以用於三角型和四面體的網格上。 相對於彈簧平滑模型,層模型(Layering)則是在邊界移動的 時候,會將被壓縮或拉伸的網格併入其他排或者是新增一排來 做處理,見圖 3-3。而在做處理的時候,要先設定分割係數 s及 合併係數 c這兩項參數:當網格的高度比 1 s h0來得大時, 會將網格做分割的動作,而當網格的高度比 ch0小時,則會將 網格合併,h0在此表示所定義的理想網格高度。但此方法會變 更網格的連續性,而且只適用於四邊形、六邊形及楔形這三種 方法。而判斷網格併入或新增的條件則有兩種:固定高度法和 固定比例法這兩種。若是固定高度法的話,所分割出來的網格 高度是產生和之前相同高度的網格,而固定比例法的話則是產 生高度比例為 s的網格。27 而部分網格重新劃分模型(Local Remeshing)的概念與層模型十分 相近,部分網格重新劃分模型會將被壓縮或拉伸的網格併入其他的網 格,見圖 3-4。而兩者的差別則是在於部分網格重新劃分模型是直接設 定網格的大小的上下限,而層模型是設定比例。而且,部分網格重新 劃分模型的網格劃分條件還多加了一項:最大網格畸變率(Max Cell Skewness),當網格畸變率超過最大網格畸變率時,即會產生新的網格。 網格畸變率 Skewness 的定義如下(見圖 3-5): Skewness 最佳網格體積 網格體積 最佳網格體積 (3-18)
3.4 滑移網格
滑移網格是在模擬時,區域的邊界與其他區域之邊界處於滑動的狀 態下可使用的網格變化方式。在使用滑移網格時,區域中的網格不像 移動網格計算時會有網格外形的變化或數量的增減,而是整個區域的 網格依照著指定的模式做運動。使用滑移網格可以使得模擬計算的時 間縮短,但是其使用之限制較多,包括會受到運動模式、模型邊界等 影響。在本文中三維的粒子串的模擬則可適用滑移網格,所以在此三 維之模擬均是使用滑移網格來模擬。而此處滑移網格之移動模式也和 粒子串之擺動模式相同: t 2 Maxf cos 2 ft (3-19)28
29
30
圖 3- 3 移動網格之彈簧平滑模型示意圖
31
圖 3- 5 移動網格之部分網格重新劃分模型示意圖
32
第四章 初步模擬結果與分析
本章節將對 Fluent 模擬計算所得之二維及三維結果進行分析。本流 場之觀察重點在於粒子串上各粒子之受力,本文中會改變擺動最大角 度 MAX以及粒子串之顆數來分析其影響,並利用流場中觀察到的粒子 串上各粒子之受力來分析並預測其擺動斷裂位置及斷裂時間。4.1 模擬結果之分析與比較
基本的流場可從圖 4-1 中看出,此流場主要可以分成 2 大部分:溶 劑的蒸餾水以及溶質之 Dynabeads M-450 Epoxy 的磁性粒子。而磁性粒 子之操縱是採用 FLUENT 當中的 UDF(USER DEFINED FUNCTION) 掛載於運動模式當中來控制的。 本文中模擬所使用的基本參數如下: 粒子之直徑d 4 5 m、蒸餾水的密度為 998 2 kg m3 、黏滯係 數 0 001003 kg m s 、粒子串之擺動頻率f 1 次 sec4.1.1 二維模擬結果
本段落要討論的二維模擬是以 15 顆粒子所串成的粒子串以及 20 顆 粒子所串成的粒子串以及粒子串所受到的各種力以及可能造成的結 果。 二維 15 顆粒子串的參數如下: 粒子串之最大擺動角度:64.107° 粒子串所含粒子顆數:15 顆33 粒子串之斷裂時間:t=0.35 sec 二維 15 顆粒子串所使用的網格可以從圖 4-2 中看到,在圖中紅色 網格的部分是移動網格的部分網格重新劃分模型所改變的部分,而綠 色的部分則是移動網格不會影響到的部分。 二維 15 顆粒子串流場於 t=0.1 sec ~ 0.5 sec 時所變化的情形則可以 在圖 4-3 中看出,圖中包含模擬內容之前半周期,t=0.1 sec、0.2 sec、 0.25 sec、0.3 sec、0.4 sec、0.5 sec 等 6 個時間下流場之壓力分布圖。圖 中可以看出,粒子串於較邊緣的部分有著較大的壓力梯度差,在此也 代表了外側的磁性粒子有著較大的形狀阻力。 二維 15 顆粒子串所受的徑向磁偶極力可以由圖 4-4 看出其大小約 在 10-11牛頓,而二維 15 顆粒子串所受的向心力則可以由圖 4-5 中看出 大小約為 10-16牛頓,兩種力相互比較後可以看出徑向之磁偶極力遠大 於向心力。在徑向方向上主要影響粒子串運動的有徑向的磁偶極力以 及向心力,而在此當向心力遠小於徑向之磁偶極力時則代表徑向上的 磁偶極力可供給足夠的動量來維持向心力所造成的運動模式,所以這 也代表徑向上的斷裂是不會發生的,而且因為徑向磁偶極力遠大於向 心力,所以在此可以忽略向心力所造成的影響。所以在此正向力可表 示成圖 4-6 所示。 由於之前的假設我們在切線方向上忽略了影響粒子串運動的慣性 力,主要著重於分析讓粒子串形變或斷裂的流體阻力,圖 4-7 為二維 15 顆粒子串所受的流體阻力,在此我們要特別分析的是在 t=0.26 sec 時的流體阻力,因為在實驗時粒子串的狀態除了在 t=0.25 sec、t=0.26 sec、 t=0.75 sec、t=0.76 sec 這 4 個時間點才會保持粒子串呈現直線的外型,
34
而且粒子串實際在實驗上斷裂或形變時之外型均不會保持成一直線的 情況,所以需要從粒子串保持直線外型的狀態下做分析以得到其所受 內力的趨勢。在此粒子串均於 t=0.25 sec~ t=0.5 sec 產生形變,所以本 文主要是從 t=0.25 sec~ t=0.5 sec 中的 t=0.26 sec 開始分析,所以我們在 粒子串切線方向上之斷裂以討論 t=0.26 sec 的粒子串受力情形為主。 圖 4-8 為二維 15 顆粒子串在 t=0.26 sec 時各粒子所受的流體阻力, 此流體阻力所造成的粒子串角加速度變化則可以於圖 4-9 中看出。但是 粒子的形變是由粒子於其相鄰的粒子之角加速度差所造成的,所以在 此我們需求得粒子與其相鄰粒子之角加速度差(見圖 4-10),圖中可以看 出,粒子串中與粒子串旋轉中心的相鄰的兩顆粒子的角加速度為最大, 但是由於在旋轉中心的形變發生較不容易觀察,所以在此先討論非旋 轉中心處的形變。圖 4-10 中可以看出,在第三顆粒子和第五顆粒子與 第十一顆粒子和第十三顆粒子之間有著角加速度差較小的情形,而在 角加速度最小的情況下也就代表著粒子串相對位移最小的地方是座落 於此處,也代表著此處所受的內力矩會是最大的,所以斷裂基本上會 是在角加速度差較小的地方產生。二維 15 顆粒子串斷裂處可以在圖 4-11 中看出大約是在第三顆與第四顆中間以及第十二顆與第十三顆中 間,相互比較後發現斷裂處都約在粒子之角加速度差較小的地方產 生。 二維 20 顆粒子串的參數如下: 粒子串之最大擺動角度:73.161° 粒子串所含之粒子顆數:20 顆 粒子串之斷裂時間:t=0.29 sec
35 二維 20 顆粒子串所使用的網格可以從圖 4-12 中看到,在圖中紅色 網格的部分是移動網格的部分網格重新劃分模型所改變的部分,而綠 色的部分則是移動網格不會影響到的部分。在此使用較二維 15 粒子串 大範圍的邊界以減少邊界的影響。 二維 20 顆粒子串流場於 t=0.1 sec ~ 0.5 sec 時所變化的情形則可以 在圖 4-13 中看出,圖中包含模擬內容之前半周期,t=0.1 sec、0.2 sec、 0.25 sec、0.3 sec、0.4 sec、0.5 sec 等 6 個時間下流場之壓力分布圖。圖 中一樣可以看出,粒子串於較邊緣的部分有著較大的壓力梯度差,在 此也代表了外側的磁性粒子有著較大的形狀阻力,這也和二維 15 顆粒 子串有同樣的結果。 二維 20 顆粒子串所受的徑向磁偶極力可以由圖 4-14 看出其大小 約在 10-11牛頓,而二維 20 顆粒子串所受的向心力則可以由圖 4-15 中 看出大小約為 10-16牛頓,兩種力相互比較後可以看出徑向之磁偶極力 遠大於向心力。在徑向方向上主要影響粒子串運動的有徑向的磁偶極 力以及向心力,而在此當向心力遠小於徑向之磁偶極力時則代表徑向 上的磁偶極力可供給足夠的動量來維持向心力所造成的運動模式,也 就是代表徑向上的斷裂是不會發生的,而且因為徑向磁偶極力遠大於 向心力,所以在此可以忽略向心力所造成的影響。這結果和二維 15 顆 粒子串所得的結論相同,所以我們可以先假設二維磁性粒子串不會有 徑向斷裂的情形產生。因此,徑向上忽略向心力影響後,正向力就如 圖 4-16 所示。 由於之前我們假設我們是在於慣性軸上之觀察,所以在此可以忽略 影響粒子串運動的慣性力,切線方向上可主要著重於讓粒子串形變或 斷裂的流體阻力,圖 4-17 為二維 20 顆粒子串所受的流體阻力,在此我 們要特別分析的是在 t=0.26 sec 時的流體阻力,因為在實驗時粒子串的
36
狀態除了在 t=0.25 sec、t=0.26 sec、t=0.75 sec、t=0.76 sec 這 4 個時間 點才會保持粒子串呈現直線的外型,而且粒子串實際在實驗上斷裂或 形變時外型均不會保持成一直線的情況,所以需要從粒子串保持直線 外型的狀態下做分析以得到其所受內力的趨勢。在此粒子串均於 t=0.25 sec~ t=0.5 sec 產生形變,所以本文主要是從 t=0.25 sec~ t=0.5 sec 中的 t=0.26 sec 開始分析,所以我們在粒子串切線方向上之斷裂以討論 t=0.26 sec 的粒子串受力情形為主。 圖 4-18 為二維 20 顆粒子串在 t=0.26 sec 時各粒子所受的流體阻力, 此流體阻力所造成的粒子串角加速度變化則可以於圖 4-19 中看出。但 是粒子的形變是由粒子於其相鄰的粒子之角加速度差所造成的,所以 在此我們需求得粒子與其相鄰粒子之角加速度差(見圖 4-20),圖中可以 看出,粒子串中與粒子串旋轉中心的相鄰的兩顆粒子的角加速度為最 大,但是由於在旋轉中心的形變發生較不容易觀察,所以在此先討論 非旋轉中心處的形變。圖 4-20 中可以看出,在第六顆粒子和第八顆粒 子與第十三顆粒子和第十五顆粒子之間有著角加速度差較小的情形, 而在角加速度最小的情況下也就代表著粒子串相對位移最小的地方是 座落於此處,也代表著此處所受的內力矩會是最大的,所以斷裂基本 上會是在角加速度差較小的地方產生。二維 20 顆粒子串扭曲處可以在 圖 4-21 中看出大約是第四顆至第六顆以及第十五顆至第十七顆之間, 相互比較後發現形變處都約在粒子之角加速度差較小的地方產生。 至此二維模擬之結果可以有下列幾項結論: 1.粒子串擺動時不會有徑向方向之斷裂產生,會以切線方向之斷裂 為主。 2.粒子串由於使用於慣性座標軸上的分析,所以不考慮慣性座標軸 的影響,只看流體阻力造成之影響的話,粒子串形變或斷裂之位置
37 會在流體阻力所造成的角加速度差最小的地方產生。
4.1.2 三維模擬結果
本節要討論的三維模擬是以 11 顆粒子所串成的粒子串、15 顆粒子 所串成的粒子串以及 20 顆粒子所串成的粒子串為主,並分析粒子串所 受到的各種力以及可能造成的結果。 三維 11 顆粒子串的參數如下: 粒子串之最大擺動角度:76.001° 粒子串所含粒子顆數:11 顆 粒子串之斷裂時間:t=0.35 sec 圖 4-22 是三維 11 顆粒子串所使用的網格,其中紅色的部分是滑移 網格所影響的部分,而綠色部分則是不受滑移網格所影響的部分。在 此因三維的模擬已達 Fluent 所支援的網格數上限,所以會限制模擬邊 界的大小以將計算網格數減少來使得 Fluent 可以加以運算。 在圖 4-23 中可以看到三維 11 顆粒子串於 t=0.1 sec ~0.5 sec 之間流 場(Z=0)之變化圖,其中包含了模擬內容之前半周期,t=0.1 sec、0.2 sec、 0.25 sec、0.3 sec、0.4 sec、0.5 sec 等 6 個時間下流場之壓力分布圖。在 此可以看到因為使用了滑移網格,所以在交界處(Interface)的部分有邊 界的影響的出現。三維 11 顆粒子串所受的徑向磁偶極力可以由圖 4-24 看出其大小 約在 10-11牛頓,而三維 11 顆粒子串所受的向心力則可以由圖 4-25 中
38 遠大於向心力。在徑向方向上主要影響粒子串運動的有徑向的磁偶極 力以及向心力,而在此當向心力遠小於徑向之磁偶極力時則代表徑向 上的磁偶極力可供給足夠的動量來維持向心力所造成的運動模式,也 代表著徑向上的斷裂是不會發生的。且因為徑向磁偶極力遠大於向心 力,所以可以忽略向心力所造成的影響。因此,徑向上忽略向心力影 響後,簡化之正向力可從圖 4-26 中得知。 由於之前的假設,所以在此可以忽略影響粒子串運動的慣性力,切 線方向上可主要著重於讓粒子串形變或斷裂的流體阻力,圖 4-27 為三 維 11 顆粒子串所受的流體阻力,在此我們要特別分析的是在 t=0.26 sec 時的流體阻力,因為在實驗時粒子串的狀態除了在 t=0.25 sec、t=0.26 sec、 t=0.75 sec、t=0.76 sec 這 4 個時間點才會保持粒子串呈現直線的外型, 而且粒子串實際在實驗上斷裂或形變時其外型不會保持成一直線的情 況,所以需要從粒子串保持直線外型的狀態下做分析以得到其所受內 力的趨勢。在此粒子串均於 t=0.25 sec~ t=0.5 sec 產生形變,所以本文 主要是從 t=0.25 sec~ t=0.5 sec 中的 t=0.26 sec 開始分析,所以我們在粒 子串切線方向上之斷裂以討論 t=0.26 sec 的粒子串受力情形為主。 圖 4-28 為三維 11 顆粒子串在 t=0.26 sec 時各粒子所受的流體阻力, 此流體阻力所造成的粒子串角加速度變化則可以於圖 4-29 中看出。但 是粒子的形變是由粒子於其相鄰的粒子之角加速度差所造成的,所以 在此我們需求得粒子與其相鄰粒子之角加速度差(見圖 4-30),圖中可以 看出,粒子串中與粒子串旋轉中心的相鄰的兩顆粒子的角加速度為最 大,但是由於在旋轉中心的形變發生較不容易觀察,所以在此先討論 非旋轉中心處的形變。圖 4-30 中可以看出,在第四顆粒子和第五顆粒 子與第七顆粒子和第八顆粒子之間有著角加速度差較小的情形,而在 角加速度最小的情況下也就代表著粒子串相對位移最小的地方是座落
39 於此處,也代表著此處所受的內力矩會是最大的,所以斷裂基本上會 是在角加速度差較小的地方產生。三維 11 顆粒子串斷裂處可以在圖 4-31 中看出大約是第四顆粒子和第五顆粒子之間,相互比較後發現實 驗所觀察到的斷裂處也是在粒子之角加速度差較小的地方產生。 三維 15 顆粒子串的參數如下: 粒子串之最大擺動角度:64.107° 粒子串所含粒子顆數:15 顆 粒子串之斷裂時間:t=0.35 sec 圖 4-32 是三維 15 顆粒子串所使用的網格,其中紅色的部分是滑移 網格所影響的部分,而綠色部分則是不受滑移網格所影響的部分,在 此因三維的模擬已達 Fluent 所支援的網格數上限,所以會限制流場邊 界的大小以將計算網格數減少來使 Fluent 可以運算。 在圖 4-33 中可以看到三維 15 顆粒子串於 t=0.1 sec ~0.5 sec 之間流 場(Z=0)之變化圖,其中包含了模擬內容之前半周期,t=0.1 sec、0.2 sec、 0.25 sec、0.3 sec、0.4 sec、0.5 sec 等 6 個時間下流場之壓力分布圖。在 此可以看到因為使用了滑移網格,所以在交界處(Interface)的部分有邊 界的影響的出現。 三維 15 顆粒子串所受的徑向磁偶極力可以由圖 4-34 看出其大小 約在 10-11牛頓,而三維 15 顆粒子串所受的向心力則可以由圖 4-35 中 看出大小約為 10-16牛頓,兩種力相互比較後可以看出徑向之磁偶極力 遠大於向心力。徑向主要影響粒子串運動的有徑向的磁偶極力以及向 心力,而在此當向心力遠小於徑向之磁偶極力時則代表徑向上的磁偶 極力可供給足夠的動量來維持向心力所造成的運動模式,也就是代表 徑向上的斷裂是不會發生的,而且因為徑向磁偶極力遠大於向心力,
40 所以在此可以忽略向心力所造成的影響。這結果也和二維 15 顆粒子串 所得的結論相同。所以同樣的,粒子串所受的正向力可以表示成圖 4-36。 由於之前的假設,所以在此可以忽略影響粒子串運動的慣性力,主 要著重於讓粒子串形變或斷裂的流體阻力,圖 4-37 為三維 15 顆粒子串 所受的流體阻力,在此我們要特別分析的是在 t=0.26 sec 時的流體阻力, 因為在實驗時粒子串的狀態除了在 t=0.25 sec、t=0.26 sec、t=0.75 sec、 t=0.76 sec 這 4 個時間點才會保持粒子串呈現直線的外型,而且粒子串 實際在實驗上斷裂或形變時外型不會保持成一直線的情況,所以需要 從粒子串保持直線外型的狀態下做分析以得到其所受內力的趨勢。在 此粒子串均於 t=0.25 sec~ t=0.5 sec 產生形變,所以本文主要是從 t=0.25 sec~ t=0.5 sec 中的 t=0.26 sec 開始分析,所以我們在粒子串切線方向上 之斷裂以討論 t=0.26 sec 的粒子串受力情形為主。 圖 4-38 為三維 15 顆粒子串在 t=0.26 sec 時各粒子所受的流體阻力, 此流體阻力所造成的粒子串角加速度變化則可以於圖 4-39 中看出。但 是粒子的形變是由粒子於其相鄰的粒子之角加速度差所造成的,所以 在此我們需求得粒子與其相鄰粒子之角加速度差(見圖 4-40),圖中可以 看出,粒子串中與粒子串旋轉中心的相鄰的兩顆粒子的角加速度為最 大,但是由於在旋轉中心的形變發生較不容易觀察,所以在此先討論 非旋轉中心處的形變。圖 4-40 中可以看出,在第三顆粒子和第五顆粒 子與第十一顆粒子和第十三顆粒子之間有著角加速度差較小的情形, 而在角加速度最小的情況下也就代表著粒子串相對位移最小的地方是 座落於此處,也代表著此處所受的內力矩會是最大的,所以斷裂基本 上會是在角加速度差較小的地方產生。三維 15 顆粒子串扭曲處可以在 圖 4-41 中看出大約是第三顆與第四顆以及第十二顆與第十三顆之間,
41 相互比較後發現形變處都約在粒子之角加速度差較小的地方產生。 三維 20 顆粒子串的參數如下: 粒子串之最大擺動角度:73.161° 粒子串所含之粒子顆數:20 顆 粒子串之斷裂時間:t=0.29 sec 圖 4-42 是三維 20 顆粒子串所使用的網格,其中紅色的部分是滑移 網格所影響的部分,而綠色部分則是不受滑移網格所影響的部分。在 此因三維的模擬已達 Fluent 所支援的網格數上限,所以需限制流場邊 界的大小以將計算網格數減少來使 Fluent 可以運算。在此也因為三維 20 顆粒子串所需模擬時間過長,所以在此只截取前半周期 (t=0sec~=0.5sec)來做分析與討論。 在圖 4-43 中可以看到三維 20 顆粒子串於 t=0.1 sec ~0.5 sec 之間流 場(Z=0)之變化圖,其中包含了模擬內容之前半周期,t=0.1 sec、0.2 sec、 0.25 sec、0.3 sec、0.4 sec、0.5 sec 等 6 個時間下流場之壓力分布圖。在 此可以看到因為使用了滑移網格,所以在交界處(Interface)的部分有邊 界的影響的出現。 三維 20 顆粒子串所受的徑向磁偶極力可以由圖 4-44 看出其大小 約在 10-11牛頓,而三維 20 顆粒子串所受的向心力則可以由圖 4-45 中 看出大小約為 10-16牛頓,兩種力相互比較後可以看出徑向之磁偶極力 遠大於向心力。徑向主要影響粒子串運動的有徑向的磁偶極力以及向 心力,而在此當向心力遠小於徑向之磁偶極力時則代表徑向上的磁偶 極力可供給足夠的動量來維持向心力所造成的運動模式,也就是代表 徑向上的斷裂是不會發生的,而且因為徑向磁偶極力遠大於向心力,
42 所以在此可以忽略向心力所造成的影響。因此,徑向上忽略向心力影 響後之正向力就如圖 4-46 所示。 由於之前的假設,所以在此可以忽略影響粒子串運動的慣性力,切 線方向上可主要著重於讓粒子串形變或斷裂的流體阻力,圖 4-47 為三 維 20 顆粒子串所受的流體阻力,在此我們要特別分析的是在 t=0.26 sec 時的流體阻力,因為在實驗時粒子串的狀態除了在 t=0.25 sec、t=0.26 sec、 t=0.75 sec、t=0.76 sec 這 4 個時間點才會保持粒子串呈現直線的外型, 而且粒子串實際在實驗上斷裂或形變時外型均不會保持成一直線的情 況,所以需要從粒子串保持直線外型的狀態下做分析以得到其所受內 力的趨勢。在此粒子串均於 t=0.25 sec~ t=0.5 sec 產生形變,所以本文 主要是從 t=0.25 sec~ t=0.5 sec 中的 t=0.26 sec 開始分析,所以我們在粒 子串切線方向上之斷裂以討論 t=0.26 sec 的粒子串受力情形為主。 圖 4-48 為三維 20 顆粒子串在 t=0.26 sec 時各粒子所受的流體阻力, 此流體阻力所造成的粒子串角加速度變化則可以於圖 4-49 中看出。但 是粒子的形變是由粒子於其相鄰的粒子之角加速度差所造成的,所以 在此我們需求得粒子與其相鄰粒子之角加速度差(見圖 4-52),圖中可以 看出,粒子串中與粒子串旋轉中心的相鄰的兩顆粒子的角加速度為最 大,但是由於在旋轉中心的形變發生較不容易觀察,所以在此先討論 非旋轉中心處的形變。圖 4-50 中可以看出,在第四顆粒子和第六顆粒 子與第十五顆粒子和第十八顆粒子之間有著角加速度差較小的情形, 而在角加速度最小的情況下也就代表著粒子串相對位移最小的地方是 座落於此處,也代表著此處所受的內力矩會是最大的,所以斷裂基本 上會是在角加速度差較小的地方產生。三維 20 顆粒子串斷裂處可以在 圖 4-51 中看出大約是第三顆粒子和第六顆粒子之間以及第十五顆至第 十八顆之間,相互比較後發現實驗所觀察到的斷裂處也是在粒子之角
43 加速度差較小的地方產生。 至此三維模擬之結果可以有下列幾項結論: 1.粒子串擺動時不會有徑向方向之斷裂產生,會以切線方向之 斷裂為主。 2.粒子串由於使用於慣性座標軸上的分析,所以不考慮慣性座 標軸的影響,只看流體阻力造成之影響的話,粒子串形變或斷 裂之位置會在流體阻力所造成的角加速度差最小的地方產 生。 3.三維模擬較能貼近實驗的結果,二維模擬還是有一定以上的 誤差。
44
圖 4- 1 流場之基本狀態
45
圖 4- 3 二維 15 顆粒子串流場在時間 T=0.1 sec ~ 0.5 sec 中壓力分布圖
46
圖 4- 5 二維 15 顆粒子串所受之向心力
47
圖 4- 7 二維 15 顆粒子串所受之流體阻力
48
圖 4- 9 二維 15 顆粒子於 t=0.26 sec 時流體阻力所造成角加速度變化
圖 4- 10 二維 15 顆粒子於 t=0.26 sec 時流體阻力所造成粒子於鄰近粒子 的角加速度差
49
50
圖 4- 12 二維 20 顆粒子串所使用之網格
51
圖 4- 14 二維 20 顆粒子串所受之徑向磁偶極力
52
圖 4- 16 二維 20 顆粒子串所受之正向力
53
圖 4- 18 二維 20 顆粒子串於 t=0.26 sec 時所受之流體阻力
54
圖 4- 20 二維 20 顆粒子於 t=0.26 sec 時流體阻力所造成粒子於鄰近粒子 的角加速度差
55
圖 4- 22 三維 11 顆粒子串所使用之網格
圖 4- 23 三維 11 顆粒子串流場(Z=0)於時間 T=0.1 sec ~0.5 sec 之壓力分 布圖
56
圖 4- 24 三維 11 顆粒子串所受之徑向磁偶極力
57
圖 4- 26 三維 11 顆粒子串所受之正向力
58
圖 4- 28 三維 11 顆粒子串於 t=0.26 sec 時所受之流體阻力
59
圖 4- 30 三維 11 顆粒子串於 t=0.26 sec 時流體阻力所造成粒子於鄰近粒 子的角加速度差
60
圖 4- 32 三維 15 顆粒子串所使用之網格
圖 4- 33 三維 15 顆粒子串流場(Z=0)於時間 T=0.1 sec ~0.5 sec 之壓力分 布圖
61
圖 4- 34 三維 15 顆粒子串所受之徑向磁偶極力
62
圖 4- 36 三維 15 顆粒子串所受之正向力
63
圖 4- 38 三維 15 顆粒子串於 t=0.26 sec 時所受之流體阻力
64
圖 4- 40 三維 15 顆粒子串於 t=0.26 sec 時流體阻力所造成粒子於鄰近粒 子的角加速度差
65
圖 4- 42 三維 20 顆粒子串所使用之網格
圖 4- 43 三維 20 顆粒子串流場(Z=0)於時間 T=0.1 sec ~0.5 sec 之壓力分 布圖
66
圖 4- 44 三維 20 顆粒子串所受之徑向磁偶極力
67
圖 4- 46 三維 20 顆粒子串所受之正向力
68
圖 4- 48 三維 20 顆粒子串於 t=0.26 sec 時所受之流體阻力
69
圖 4- 50 三維 20 顆粒子串於 t=0.26 sec 時流體阻力所造成粒子於鄰近粒 子的角加速度差
70
第五章 結論與未來方向
5.1 結論
本研究在針對磁性粒子串於流場中擺動之情形,成功建立一套模組 來模擬此情形,並嘗試改變粒子串中所含有粒子之顆數、粒子串所擺 動之最大角度等可控制之變因來分析。並在下列前述假設之下,可以 得到下列幾項結論: 1. 由於磁性粒子串因徑向磁偶極力大於向心力,所以不會產生 徑向方向的破壞。 2. 於磁性粒子串之模擬運算上,三維之模擬比二維之模擬較能 貼近實驗之結果。 3. 磁性粒子串之切線方向之形變或破斷主要來自於阻力的影 響。 4. 磁性粒子串之形變或破斷較容易產生於流體阻力所造成的 角速度差較小的地方。71
5.2 未來方向
對於本研究之模擬而言,雖然成功建立以商用軟體來模擬磁性粒子 運動的模組,但是還仍有許多可加以改進的空間,以下列出幾點需改 進的部分: 1. 計算時間的短縮:在本文中所提到三維的模擬,要完成至少需約三 個月的時間,若是有需途中修改或變更的設定則會大幅延長模擬時 間。所以在此計算時間的短縮是必頇的。 2. 運動模式的耦合:本模組中使用 Fluent 的模擬,粒子串均符合外形 不變的假設,而且其運動模式是從實驗所得而來,並不是外加擺動 磁場來使磁性粒子串做出擺動的動作。所以要有更完整的模擬結果 必頇將磁場的統御方程式寫入 Fluent 來計算並且頇將原粒子串分 成一顆一顆的粒子來分析。 3 計算分析流程的簡化:在本分析中,後處理的部分程序首先頇撰寫 批次檔將 Fluent 中的壓力等資料用 ASCII 格式輸出,之後再撰寫巨 集將 ASCII 檔轉換成 EXCEL 檔,最後再利用 Matlab 將 EXCEL 檔 讀入後做運算。這樣在進行後處理運算之前頇先撰寫 2 個巨集來將 檔案轉換成後處理 Matlab 可使用的格式,在這邊若是可以簡化這 程序則後處理的部分可以節省很多時間。72
參考文獻
[1] By S. Stephen Papell and Otto C. Faber, Jr. “ON THE INFLUENCE OF NONUNIFORM MAGNETIC FIELDS ON FERROMAGNETIC COLLOIDAL SOLS .” NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, D. C. (1968)
[2] Achintya Mukhopadhyay, Ranjan Ganguly, Swarnendu Sen ,Ishwar K. Puri “A scaling analysis to characterize thermomagnetic convection.” International Journal of Heat and Mass Transfer 48 (2005)
[3] K. Raj and R. Moskowitzn “A REVIEW OF DAMPING APPLICATIONS OF FERROFLUIDS” IEEE TRANSACTIONS ON MAGNETICS, VOL. MAG-16, NO. 2, (1980)
[4] Erik Gauger1 and Holger Stark” Numerical study of a microscopic artificial swimmer” PHYSICAL REVIEW E 74, (2006)
[5] Suprabha Nayar, Aparna Mir, Aarti Ashok, Avijit Guha and Vikas Sharma” Bovine Serum Albumin Binding and Drug Delivery Studies with PVA-Ferrofluid” Journal of Bionic Engineering 7 (2010)
[6] A. Ghanbari, M. Bahrami,* and M. R. H. Nobari “Methodology for artificial microswimming using magnetic actuation.” PHYSICAL REVIEW E 83, 046301 (2011)
[7] Tae Gon Kang, Martien A. Hulsen,* Patrick D. Anderson, Jaap M. J. den Toonder, and Han E. H. “Chaotic mixing induced by a magnetic chain in a rotating magnetic field.” PHYSICAL REVIEW E 76, 066303 (2007) [8] Oscar G Calder´on and Sonia Melle “Dynamics of simple magnetorheological suspensions under rotating magnetic fields with modulated Mason number.” J. Phys. D: Appl. Phys. 35 (2002)
[9] Motoyoshi TACHIBANA and Yoshiyuki IEMOTO “Steady flow around, and drag on a circular cylinder moving at low speeds in a viscous liquid between two parallel planes.” Fluid Dynamics Research 2 (1987)