子計畫一:以 OFDM 為基礎之 DAB 與 DVB-T 系統整合型接收
機架構設計(2/3)
計畫類別: 整合型計畫 計畫編號: NSC92-2220-E-009-018- 執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日 執行單位: 國立交通大學電信工程學系 計畫主持人: 黃家齊 計畫參與人員: 鄭有財,林香君,劉肖真,林家輝,黃俊元 報告類型: 完整報告 報告附件: 出席國際會議研究心得報告及發表論文 處理方式: 本計畫可公開查詢中 華 民 國 93 年 5 月 28 日
行政院國家科學委員會補助專題研究計畫
□ 成 果 報 告
■期中進度報告
用於軟體無線電基頻處理之系統晶片設計技術
子計劃一:以 OFDM 為基礎之 DAB 與 DVB-T 系統整合型接
收機架構設計(2/3)
計畫類別:□ 個別型計畫
▓
整合型計畫
計畫編號:NSC92-2218-E-009-004
執行期間: 九十二 年 八 月 一 日至 九十三 年 七 月 三十一 日
計畫主持人:黃家齊 教授
共同主持人:無
計畫參與人員:鄭有財、林香君、劉肖真、林家輝、黃俊元
成果報告類型(依經費核定清單規定繳交):□精簡報告
▓
完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
的架構設計。由於數位音響廣播系統(以下簡稱 DAB 系統) 中採用的是差分調變 系統,並不需要進行通道估測,可直接解調出資料。所以我們針對數位影像地面 廣播系統(以下簡稱 DVB-T 系統) ,利用散射領航信號(scattered pilot)設計其 通道估測及訊號偵測之子系統架構,做為 SDR 設計的參考。我們以三種利用領 航符元的方法:一維通道估測、二維通道估測及改良型最小均方差通道估測法, 來估計通道並且說明這些方法的優點和缺點。而在訊號偵測部分則設計一個通道
等化器(channel equalizer)與決策器(data decision unit)。由於 DVB-T 為 OFDM
系統,通道等化器為單閥等化器(one-tap equalizer)在此我們採用逼零演算法 (zero forcing)。此外,我們亦利用通道估計估出通道的特性,加上等化器及決 策器所估出的傳送資料,而估出傳送資料經過通道所受到的效應,分別取出每一 個 路 徑 的 訊 號 以 排 除 多 路 徑 的 干 擾 , 再 以 最 大 比 例 匹 配 ( Maximum ratio combining)重建出較為準確的接收訊號,可以反覆的進行,先得到更新之後的 每一個路徑的訊號,而又重建出更準確的接收訊號,最後得到更準確的傳送訊號。 關鍵詞:OFDM 接收機,通道估測,訊號偵測,數位音響廣播系統,數位影像 地面廣播系統,領航符元,一維通道估測,二維通道估測,改良型最小均方差通 道估測,通道等化器,單閥等化器,決策器,多路徑的干擾,最大比例匹配。
The project this year is focused on designing architectures for the channel estimation and data detection subsystems of the OFDM receiver. Because the transmission method of the digital audio broadcasting system (DAB) is differential modulation, it does not require channel estimation and the data can be detected directly. Therefore, we focus on the digital video broadcasting – terrestrial (DVB-T) system. By using scattered pilot signals, we designed the architecture of the channel estimation and signal detection subsystems as a reference for SDR design. Three kinds of pilot-symbol-based channel estimation methods, which are called 1-D channel estimation method, 2-D channel estimation method, and the modified MMSE channel estimation method, are designed for a DVB-T receiver. We also discussed the advantages and disadvantages of these methods. In the aspect of signal detection, we designed the channel equalizer and the data decision unit. Because the DVB-T system is a OFDM system, the most commonly used channel equalizer is the one-tap equalizer. Here, we adopt the zero-forcing algorithm for this channel equalizer. Besides, we get the channel characteristic from channel estimation and utilize the estimated data from equalizer and data decision unit to separate the received signal in each path by eliminating the multipath interference. Afterwards, we use the maximal ratio combining method to collect the energy in the received multipath signals. By repeating this process, we are able to refine the received signals and achieve more reliable data detection.
Key Word: OFDM receiver, channel estimation, signal detection, DAB, DVB-T, pilot-symbol, 1-D channel estimation, 2-D channel estimation, modified MMSE channel estimation, channel equalizer, one-tap equalizer, data decision unit, multipath interference, maximum ratio combining.
圖目錄 ... 2 表目錄 ... 4 1 序論... 5 1.1 DVB-T 系統簡介 ... 5 1.1.1 傳輸訊號及碼框結構 ... 6 1.1.2 參考訊號 ... 7 1.2 DAB 系統簡介 ... 9 1.2.1 傳輸訊號及碼框結構 ... 9 1.3 DVB-T 通道估測 ... 13 1.4 數位音響廣播與數位影像廣播地面廣播系統之整合 ... 13 2 DVB-T 通道估測方法 ... 15 2.1 傳輸通道之描述 ... 15 2.1.1 寬頻傳輸訊號之通道模型 ... 15 2.1.2 窄頻傳輸之通道模型 ... 16 2.1.3 通道模型 ... 16 2.2 利用領航訊號通道估測方法 ... 17 2.2.1 領航訊號之放置 ... 17 2.2.2 一維通道估測 ... 19 2.2.2.1 一維線性內插法 ... 19 2.2.2.2 一維快速傅立葉轉換內插法(I) ... 19 2.2.2.3 一維快速傅立葉轉換內插法(II) ... 22 2.2.3 二維通道估測 ... 24 2.2.3.1 二維快速傅立葉轉換內插法 ... 24 2.2.3.2 串連型一維線性內插與一維快速傅立葉轉換內插法 ... 26 2.2.4 適應性估計通道方法 ... 26 2.2.4.1 線性最小均方差通道估測法 ... 26 2.2.4.2 改良式線性最小均方差通道估測法 ... 27 2.2.4.3 通道路徑的選擇(Path Selection) ... 29 2.2.5 用於 DVB-T 系統的通道估測法 ... 31 2.2.5.1 一維快速傅立葉轉換內插法 ... 31 2.2.5.2 二維快速傅立葉轉換內插法 ... 32 2.2.5.3 串連一維線性內插與一維快速傅立葉轉換法 ... 33 2.2.5.4 用於 DVB-T 系統的改良式線性最小均方差通道估測法 ... 33 3
通道等化器
... 35 3.1 逼零等化器 ... 354 訊號偵測與決策器 ... 36
4.1 DAB 系統資料偵測與決策器(SYMBOL-BY-SYMBOL DIFFERENTIAL DETECTION) . 36 4.2 DVB-T 系統資料偵測與決策器 ... 37
4.2.1 非資料重建(Non Data reconstructed)資料偵測與決策器.... 37
4.2.2 資料重建(Data reconstructed)資料偵測與決策器... 38 5 數位音響廣播與數位影像廣播地面廣播系統整合之架構設計 ... 42 5.1 DAB 與 DVB-T 系統解調器(DEMODULATOR)之整合... 42 6 電腦模擬 ... 44 6.1 DVB-T 通道估測 ... 44 6.1.1 模擬參數 ... 44 6.1.2 模擬結果 ... 46 6.1.2.1 AWGN 通道下多重路徑與能量關係 ... 46 6.1.2.2 接收機移動速度之影響 ... 48 6.2 DVB-T 通道等化器與訊號檢測 ... 54 6.2.1 模擬參數 ... 54 6.2.2 模擬結果 ... 54 6.2.2.1 AWGN 通道 ... 55 6.2.2.2 行動接收通道 ... 55 7 結論... 58 8 未來展望 ... 58 參考文獻 ... 59 圖目錄 圖1.1 DVB-T 系統之傳輸端方塊圖 ...5 圖1.2 Eureka 147 數位音響廣播系統方塊圖 ...10 圖1.3 數位音響廣播系統之多工碼框圖...10 圖1.4 數位音響廣播系統主要訊號產生器之方塊圖...11 圖1.5 簡化之 OFDM 同調解調接收端架構...13
圖2.6 取樣後訊號經過反離散傅立葉轉換之結果:出現 Sf 組大小變為原本頻率 響應1/ Sf 的訊號 ...30 圖2.7 改良式線性最小均方差通道估測法...30 圖2.8 數位影像廣播系統散射領航訊號之排列...31 圖2.9 基於一維快速傅立葉轉換之通道估計...31 圖2.10 基於二維快速傅立葉轉換之通道估計...32 圖2.11 經過線性內插法估計出時間軸通道響應的散射領航訊號...33 圖2.12 兩串連一維線性內插及快速傅立葉轉換法...33 圖2.13 用於 DVB-T 系統的改良式線性最小均方差通道估測法 ...34 圖3.1 傳送訊號經通道至接收端簡圖...35
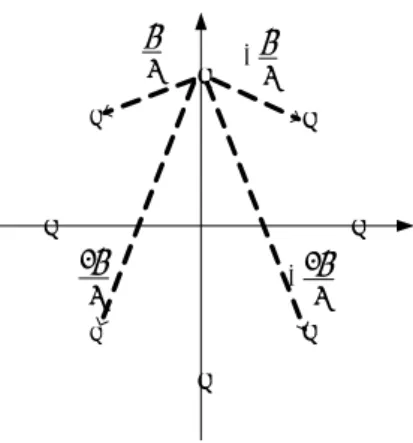
圖4.1 π/4-shift DQPSK signal space ...36
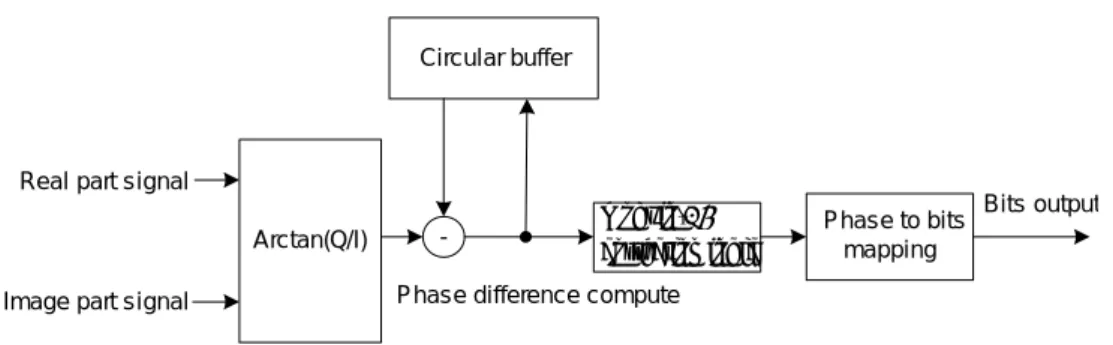
圖4.2 Symbol-by-symbol differential detection block ...37
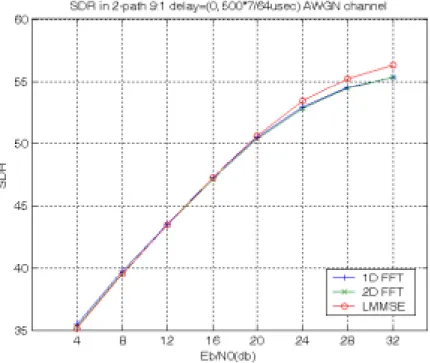
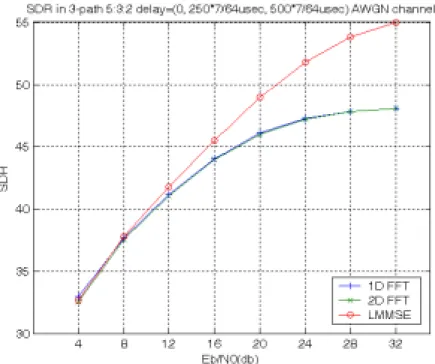
圖4.3 DVB-T 訊號解調器 ...38 圖4.4 正交分頻多工系統架構下傳送端及通道的影響...38 圖4.6 通道估計所估計出的時域通道特性...40 圖4.7 傳送資料經過編碼的機制...41 圖6.1 1:1 AWGN 通道的 SDR...46 圖6.2 9:1 AWGN 通道的 SDR...47 圖6.3 1:8:1 AWGN 通道的 SDR...47 圖6.4 5:3:2 AWGN 通道的 SDR...48 圖6.5 2K 模式下,通道延遲為 50*7/64µsec 的估計結果 ...49 圖6.6 2K 模式下,通道延遲為 500*7/64µsec 的估計結果 ...49 圖6.7 雙重路徑,路徑能量比 1:1 Delay=50×7/64usec 車速 30km/hr 的 SDR ...50 圖6.8 雙重路徑,路徑能量比 1:1 Delay=50×7/64usec 車速 90km/hr 的 SDR ...50 圖6.9 雙重路徑,路徑能量比 1:1 Delay=500×7/64usec V=30km/hr 的 SDR 51 圖6.10 雙重路徑,路徑能量比 9:1 Delay=50×7/64usec V=30km/hr 的 SDR..51 圖6.11 三路徑,路徑能量比 1:8:1 V=30km/hr 的 SDR ...52 圖6.12 三路徑,路徑能量比 1:8:1 V=90km/hr 的 SDR ...52 圖6.13 三路徑,路徑能量比 5:3:2 V=30km/hr 的 SDR ...53 圖6.14 三路徑,路徑能量比 5:3:2 V=90km/hr 的 SDR ...53 圖6.15 逼零等化器在 AWGN 通道下的 BER...55 圖6.16 逼零等化器在行動接收通道下的 BER(車速 30km/hr) ...56 圖6.17 逼零等化器在行動接收通道下的 BER(車速 90km/hr) ...56 圖6.18 逼零等化器在兩條路徑下行動接收通道下的 BER(車速 30km/hr and 90km/hr)...57 圖6.19 逼零等化器在三條路徑下行動接收通道下的 BER(車速 30km/hr and
90km/hr)...57 表目錄 表1.1 8K 及 2K 兩種傳輸模式在 8MHz 通道的相關參數表...6 表 1.2 傳輸參數訊號 ...9 表 1.3 四種傳輸模式的相關參數表 ...13 表 6.1 模擬通道估測之數位廣播系統相關參數 ...44 表 6.2 模擬等化器之數位廣播系統相關參數 ...54
1
序論1.1 DVB-T 系統簡介
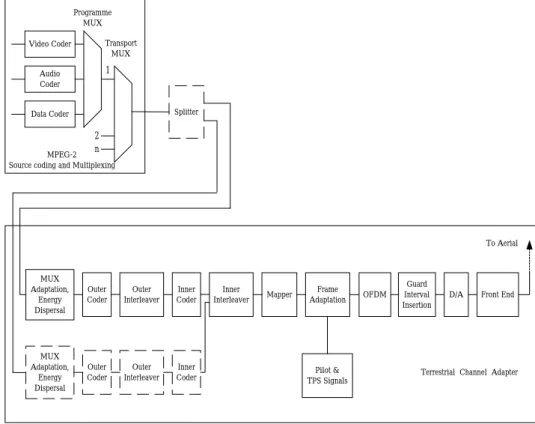
DVB-T 為歐洲 ETSI 所制定的數位影像廣播標準[1],圖 1.1 為系統之傳輸 端方塊圖,DVB-T 的特色之一是具階層式傳輸(Hierarchical Transmission)觀念 ,將一個射頻頻道分成兩個虛擬的頻道來傳送不同重要性的資料。首先利用分離
器(Splitter)將傳輸資料流(Transport Stream)分為高優先權(High Priority)及低優先 權(Low Priority)。這兩筆資料各自可有不同的通道編碼及調變方式,相同的節目 可分成高畫質和低畫質,同時以高優先權及低優先權傳輸。 Splitter Video Coder Audio Coder Data Coder Programme MUX Transport MUX 2 n 1 MPEG-2 Source coding and Multiplexing
MUX Adaptation, Energy Dispersal Outer Coder MUX Adaptation, Energy Dispersal Outer Coder Outer Interleaver Outer Interleaver Inner Coder Inner Coder Inner Interleaver Mapper Frame Adaptation Pilot & TPS Signals OFDM Guard Interval Insertion
D/A Front End
Terrestrial Channel Adapter To Aerial
圖1.1 DVB-T 系統之傳輸端方塊圖
在解調時先判斷訊號在座標 (Constellation)上的象限可先解調出高優先權資 料,再經由判斷訊號在座標上對應的位置來解調出低優先權資料。影音訊號經過 編碼壓縮(MPEG-2 coded TV signals)及傳輸層多工(Transport Multiplexing)後產
生 一 個 長 188 位元組的封包(Packet) ,必須先經過傳輸多工調整(Transport
Multiplexing Adaptation) 調 整 訊 號 能 量 分 布 並 增 加 傳 輸 訊 號 的 隨 機 性 質
(Randomization)。這個長 188 位元組的封包(Packet),包含一個同步字元
(Sync-Word Byte=47HEX)和 187 個資料位元組(Data Bytes),每八個封包一組被乘
上由產生多項式為X15+X14+ 的一組假隨機二進位數列(Pseudo Random Binary 1
Sequence),第一個封包的同步字元再由47HEX被轉換成B8HEX,如此就完成傳輸
系 統 共 有 兩 層 通 道 編 碼 及 交 錯 器 。 外 層 通 道 編 碼 使 用 里 德- 所羅 門 碼 (Reed-Solomon code,RS(204,188,t=8)),使封包由 188 位元組變為 204 位元組﹔ 外層交錯器是一個以位元組為單位的迴旋交錯器(Convolutional Interleaver),這種 交錯器比區塊交錯器(Block Interleaver)有較短的處理時間延遲。內層通道碼是編 碼率為二分之一的迴旋碼,可藉由間空法提高編碼率至2/3、3/4、5/6 或 7/8。內 層位元交錯器則為區塊位元交錯器,首先打散位元與位元間之順序,再打散整個 符元所對應的次載波順序。經過位元交錯器的資料再根據不同的調變方式將資料 對應成複數資料,可使用的調變方式共有四相移鍵調變、16 點二維振幅調變、 64 點二維振幅調變(64-QAM)、不均勻的 16 點二維振幅調變(non-uniform 16-QAM)
以及不均勻的64 點二維振幅調變(non-uniform 64-QAM)。系統有兩種傳輸模式:
2K 模式以及 8K 模式。根據不同的模式使用不同長度(2048/8192)的反快速傅立 葉轉換以得到正交分頻多工符元。整個系統屬於哪一種傳輸模式,是否使用階層 式傳輸,內層通道編碼的編碼率,以及所使用的調變方法都紀錄在傳輸參數訊號 (Transmission Parameter Signaling) 所攜帶的資訊位元區塊當中。
1.1.1 傳輸訊號及碼框結構 每個傳輸的碼框包含68 個正交分頻多工符元,每四個碼框再構成一個大碼 框(Super-frame)。在每個時間 t 所傳的訊號可由下列數學式表示: max c min K 67 j2 f t , , , , =0 =0 =K S(t)=Re{e Cm l k m l k( )} m l k t π
∑∑ ∑
∞ ×ψ (1.1) U k j2 ( 68 ) T . . ( ) e ( 68 ) ( 68 1) 0 total total t l T m T total total m l k t l m T t l m T else π ψ ′⋅ −∆− × − × × + × × ≤ ≤ + × + × = (1.2) 每個符元由[K , Kmin max] 之間次載波上所載的複數資料Cm l k, , 經由反快速傅立葉轉 換後得到。TU是有效符元的長度﹔Ttotal是完整符元長度包含一個有效符元及護 衛間隔, Kmax Kmin 2 k′ = −k + 。 兩種傳輸模式相關的參數如表1.1 所示,每一種傳輸模式都可根據需要選擇 適當的護衛間隔長度(為有效符元長度的 1/4、1/8、1/16 或 1/32)。sec 896µ U 1/T U T K max K min K max min and K K carriers between Spacing (K-1)/TU
Parameter 8K mode 2K mode
Number of carriers Vaule of carrier number Vaule of carrier number Duration Carrier spacing 6817 1705 0 0 6816 1704 1116 Hz 4464 Hz 7.61 MHz 7.61 MHz sec 224µ 1.1.2 參考訊號 數位影像廣播在許多已知的次載波位置放參考訊號,藉用這些參考訊號,可 以修正整數頻率偏移量、估計傳輸經過之通道,甚至傳輸相關參數(如調變方式、 編碼率…等)都放在參考訊號中。系統共有三種參考訊號:散射領航訊號
(Scattered Pilots)、連續領航訊號(Continual Pilots)及傳輸參數訊號(Transmission
Parameter Signaling, TPS),將一一介紹。 散射領航訊號(Scattered Pilots):
散射領航訊號可用來估計通道響應,一個碼框中第 l 個符元的散射領航訊號 位置可由下列式子得到:
min min max
K 3 ( mod 4) 12 integer, 0, k [K ,K ]
k= + × l + ×p p p≥ ∈ (1.3)
就2K 模式而言 Kmax = 1704,8k 模式的 Kmax = 6816,兩個模式的 Kmin皆為0。在
一 個 符 元 中 散 射 領 航 訊 號 每 隔 12 個 次 載 波 間 隔 出 現 一 次 , 利 用 內 插 (Interpolation)可以得到傳輸通道頻率響應估計。 連續領航訊號(Continual Pilots): 每個符元的一些固定次載波位置放置了連續領航訊號。藉由比對每個符 元的之間連續領航訊號可以找出整數載波頻率偏移量。 散射領航訊號和連續領航訊號所載的都是由一組產生多項式為X11+X2+1 的假隨機二進位數列wk 構成。散射領航訊號和連續領航訊號在次載波位置k 所 載的資料為: , , , , Re{Cm l k} 4 / 3 (1 2 ) , Im{C= × − wk m l k}=0 (1.4) 所以一個符元的連續領航訊號和散射領航訊號的值只和其所在次載波位置有關。 傳輸相關參數(Transmission Parameter Signaling, TPS):
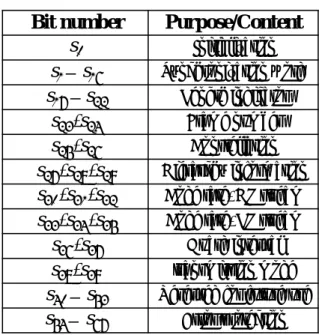
傳輸參數訊號同樣地被載在一些固定的次載波位置上,藉由和前一個正交分 頻多工符元比對可以得到一個傳輸參數訊號的資訊位元(TPS bit)S ,比對方式l 如下,第 m 個碼框第 l 個符元的第 k 個次載波位置上的 TPS 值為: , , , 1, C ( 1)Sl C , 1,2,3,...,67 m l k = − × m l− k l= (1.5)
而每個碼框的第一個符元的傳輸參數訊號則由上述w 經由下列方式產生: k ,0, ,0, Re{Cm k} 1 2= − wk , Im{Cm k}=0 (1.6) 因此每一個碼框上的68 個符元可傳遞一組 68 個位元的傳輸參數訊號資訊位 元區塊。傳輸方式、同步位元的資訊就可藉此區塊傳遞,每個傳輸參數訊號資訊 位元所代表的意義如表1.2 所示。因此在每個接收符元完成頻率同步後,藉由匹 配同步位元組(Synchronization Word, S1-S16)可以估計符元在一個碼框的開頭。
表1.2 傳輸參數訊號
Bit number Purpose/Content
0 s 24 23, s s 29 28 27,s ,s s 32 31 30,s ,s s 35 34 33,s ,s s 26 25, s s 37 36, s s 39 38, s s 16 1 s s 22 17 s s 53 40 s s 67 54 s s Initialization Synchronization word Length indicator Frame number Constellation Hierarchy information
Code rate, HP stream Code rate, LP stream
Guard interval transmission mode Reserved for future use
Error protection
1.2 DAB 系統簡介
歐規的數位音響廣播系統(Eureka 147 DAB System)是採用正交分頻多工傳 輸技術來傳送訊號。由於正交分頻多工傳輸技術的特性,特別是可以抵抗碼際干 擾,因此許多國家在數位音響廣播系統的規格上都採用了此歐規的系統,包括台 灣在內。我們將在這章節中對此系統做簡單的敘述。
1.2.1 傳輸訊號及碼框結構
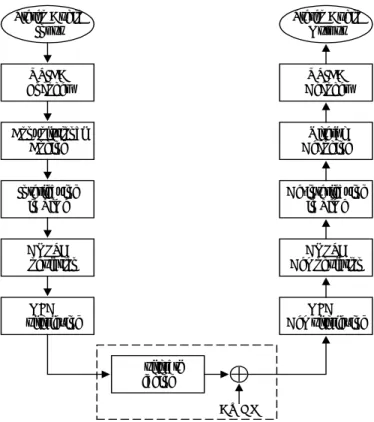
此系統方塊圖如圖 1.2 所示,聲音訊號先經由 MUSICAM(Masking pattern
adaptive Universal Sub-band Integrated Coding And Multiplexing)編碼方式將資料
量由原先每秒768,000 位元壓縮至每秒 128,000 位元,再由編碼率(Code Rate)為
1/4 的迴旋編碼器(Convolutional Encoder)對壓縮過的聲音訊號做通道編碼以降低 傳輸通道對訊號造成的錯誤率,其中藉由打孔法(Puncturing)可以得到更高的編碼 率。舉例來說,快速資訊頻道(Fast Information Channel,FIC)內的資料,其編碼
率約為 1/3。編碼後的資料先經過一個深度約為 384 毫秒的區塊交錯器(Block Interleaver),打亂每筆資料間的相關性來提高迴旋編碼器的效能,再依照差分四 相位移鍵(DQPSK)調變方式使得每兩個位元可以得到一個相對應的複數資料 (Complex Data)。最後利用反快速傅立葉轉換將每個複數資料載在不同的次載波 上再傳送出去。由於此系統有四種不同的傳輸模式,各有不同個數的次載波,快 速傅立葉/反快速傅立葉轉換的長度依次可為 2048/512/256/1024。反快速傅立葉 轉換的結果再加上一段護衛間隔就可以得到一個完整的正交分頻多工符元。
Stereo Audio Input Stereo Audio Output MUSICAM Encoder Convolutional Coding Interleaving in Time OFDM Multiplexing DQPSK Modulation MUSICAM Decoder Viterbi Decoding De-interleaving in Time OFDM Demultiplexing DQPSK Demodulation Multipath fading AWGN 圖1.2 Eureka 147 數位音響廣播系統方塊圖 而一個碼框包含了三種邏輯頻道:同步頻道(Synchronization Channel)、快速資 訊頻道、主要服務頻道(Main Service Channel,MSC)[12][13] ,如圖 1.3 所示。
Radio 1 Radio 2 Radio 3 Radio 4 Radio 5 Other Data
Synchronization Channel
Fast Information Channel ( FIC )
Main Service Channel
5 Program Services
Other Data
Audio Dta PAD
圖1.3 數位音響廣播系統之多工碼框圖
Mux Mux Block Partitioner QPSK Symbol Mapper Frequency Interleaver NULL Symbol Generator Phase Reference Symbol Generator Differential Modulation Mux OFDM Symbol Generator Mux FIBs CIFs FIC Inputs MSC Inputs TRANSMISSION FRAME MULTIPLEXER SYNCHR. CHANNEL SYMBOL GENERATOR FIC AND MSC SYMBOL GENERATOR
OFDM SIGNAL GENERATOR
k 1, Z k l, Z k l m),, ( Z ) (t S 1 > l 0 > l 圖1.4 數位音響廣播系統主要訊號產生器之方塊圖 三種頻道的資料可經由圖1.4 產生主要訊號。主要訊號產生器可以分為四個
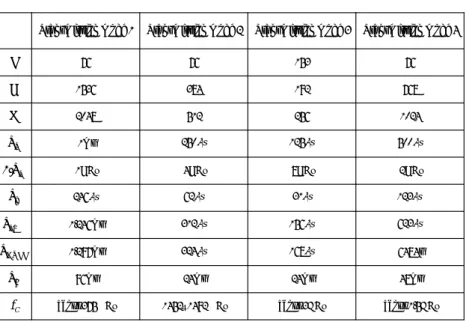
部分:傳輸碼框多工器(Transmission Frame Multiplexer)、快速資訊頻道和主要服 務頻道符元產生器(FIC and MSC Symbol Generator)、同步頻道符元產生器 (Synchronization Channel Symbol Generator) 以 及 正 交 分 頻 多 工 訊 號 產 生 器 (OFDM Signal Generator)。在傳輸碼框多工器中,快速資訊區塊(Fast Information Block,FIB)及普通交錯碼框(Common Interleaved Frame,CIF)資料分別被整 合在快速資訊頻道及主要服務頻道中,然後再將這兩種頻道的資料多工整合在一 起。快速資訊頻道和主要服務頻道符元產生器包含三個功能方塊:區塊分割器 (Block Partitioner)、四相位移鍵符元對映器(QPSK Symbol Mapper)以及頻率交錯 器(Frequency Interleaver)。各方塊的功能敘述如下:區塊分割器把由多工器輸出 的快速資訊頻道資料以及主要服務頻道資料,依照次載波個數分割成長度適當的 區塊,每個區塊的大小為一個正交分頻多工符元的長度;經由四相位移鍵調變把 {0,1}的資料位元兩兩對應成振幅為 1,相位為 } 4 3 , 4 {±π ± π 的複數資料;經過頻率 交 錯 器 把 相 鄰 的 複 數 資 料 載 到 不 相 鄰 的 次 載 波 上 以 減 少 頻 率 選 擇 性 衰 減 (Frequency Selective Fading)對訊號解碼造成的破壞。同步頻道符元產生器是用來 在每個傳輸碼框的最前面產生一個空符元(NULL Symbol)及一個相位參考符元 (Phase Reference Symbol),這兩個符元可以用來完成訊號同步。複數資料經過相 位差分調變後,在每個碼框的開頭加上一個空符元以及一個相位參考符元,接著 經由正交分頻多工訊號產生器(主要的動作為反快速傅立葉轉換)就可以得到一
個正交分頻多工碼框訊號。 傳輸訊號可以表示為: U L 2 2 , , , F NULL SYM 0 2 2 ( T ) , T SYM SYM U g ( ) Re{ ( T T ( 1)T } 0 for 0 ( ) Rect( ) for 1,2,3,...., L T T =T +T c g K j f t m l k k l K m l k j k t k l S t e Z g t m l l g t t e l π π ∞ =−∞ = =− − = ⋅ − ⋅ − − − = = ⋅ =
∑ ∑ ∑
(1.7) 每個碼框包含了 L 個符元及一個空符元,每個符元則由 K 個次載波上所載的複 數資料構成。 f 是載波的中心頻率;c TF是整個傳輸碼框的長度;TNULL是空符元 的長度;TSYM是一個完整符元的長度,包含一個有效符元的長度(T )和一個護U 衛間隔的長度(T );一個有效符元的長度有 N 個取樣,即是一個快速傅立葉轉換g /反快速傅立葉轉換的長度; SYM Rect( ) T t 是一個寬度為TSYM的方波﹔Zm l k, , 為第m 個碼框的第l個符元上第k個次載波所載的差分四相移鍵調變複數資料(Complex DQPSK data)。訊號取樣頻率為每秒 2.048 百萬個取樣,有效頻寬為 1.536MHz。 數位音響廣播系統一共有四種傳輸模式,每一種傳輸模式各有不同的載波中 心頻率,依次約為 375MHz/1.5GHz/3GHZ/1.5GHz。每種傳輸模式的相關參數如 表1.3 所示。護衛間隔的長度約為有效符元長度的四分之一;因為取樣時間、護 衛間隔和有效符元長度間的比例以及有效頻寬皆相同,從這個表中可以發現:有 一些參數,例如有效次載波的個數(K)、快速傅立葉轉換/反快速傅立葉轉換的長 度(N)、兩個相鄰次載波間的頻率間隔(1/T )、有效符元的長度(U T )、護衛間隔的U 長度(T )以及完整符元的長度(g TSYM)等等,在這四種傳輸模式中的數值成固定的 倍數比例。傳輸模式三的載波中心頻率為3GHz,此傳輸模式適用於衛星廣播; 傳輸模式二及四的載波中心頻率約為 1.5GHz,這兩種傳輸模式適用於一般區域 性地面及衛星廣播;傳輸模式一的護衛間隔最大,這個傳輸模式適用於大範圍的 地面廣播,其傳輸訊號的發射機最遠可以相隔約75 公理,所以可以應用於所謂表1.3 四種傳輸模式的相關參數表 Transmission mode 1 Transmission mode 2 Transmission mode 3 L K 76 76 153 1536 384 192 96ms 24ms 24ms 1.297ms 1.246ms s µ 324 168µs s µ 312 156µs s µ 250 125µs s µ 246 62µs 1ms F T NULL T SYM T U T Transmission mode 4 76 768 48ms s µ 500 s µ 31 123µs s µ 623 648µs g T U 1/T C
f about 375MHz 1452~1492MHz about 3GHz about 1.5GHz
1KHz 4KHz 8KHz 2KHz
N 2048 512 256 1024
1.3 DVB-T 通道估測
對一個同調調變系統而言,在接收機同步動作完成後,由於快速傅立葉轉換 輸出的訊號帶有經由通道所造成的隨機相位偏移(random phase shift)和振幅變 動(amplitude variation),必須經由等化器消除通道效應,再進行資料的解碼及 檢測[2][3],因此等化接收訊號前必須先估計通道以提供等化器傳輸通道的資
訊。圖1.5 是一個簡化的 OFDM 接收機架構:
RF Rx ADC FFT Coherent
detection Deinterleaving Decoding
Binary output data Equalization Synchronization Channel Estimation 圖1.5 簡化之 OFDM 同調解調接收端架構 因此只要在傳輸的訊號當中加入一些已知的參考訊號,在接收瑞就可藉由隱 藏在參考訊號中的通道資訊,估計還原出整個通道響應。參考訊號可以載在一些 已知的次載波上(稱之為領航次載波) ,如 DVB-T 系統中的散射領航次載波訊號 (Scattered Pilots)。 1.4 數位音響廣播與數位影像廣播地面廣播系統之整合 由前面介紹已知這兩種系統之架構,可知 DAB 與 DVB-T 之運作有甚多相
似之處,因此利用函式共用之原理可將這兩種系統整合,如圖1.6 所示。由圖 1.6 可以清楚看到系統有共用部份可予以整合,在不同的運算方式再予以區分為不同 處理路徑。詳細的整合方法我們將在第5 章有詳細的討論。 Front End A/D Guard Interval Removal Symbol Timing &
Fractional Frequency
Offset Detection FFT
Inner
De-interleaving (Viterbi Decoding)Inner Decoding De-interleavingOuter Outer Decoding(R-S Decoding) Demultiplexing andSource Decoding
Frame Synchronization by Using Null Symbol
DVB-T DAB DAB DVB-T Mode Detector One-Tap Equalizer Frame Synchronization Integral Frequency Offset Detection Integral Frequency Offset Detection Channel Estimation DVB-T DAB Symbol-by-Symbol Differential Detection Data Detection 圖1.6 DAB 與 DVB-T 系統整合之接收機架構圖
2
DVB-T 通道估測方法2.1 傳輸通道之描述
多重路徑是造成無線通訊之接收訊號失真的主要因素,它是來自於傳輸訊號 經過周遭環境物體反射所造成。通道特性可經由量測通道延遲方均根值(Root Mean Square Value of Delay Spread)得知,通道延遲之方均根值是一個很適合用 來描述通道特徵的數值,其倒數和通道的同調頻寬(Coherent Bandwidth)成正 比。所謂的同調頻寬,經常被定義為頻域上兩個不同頻率的訊號彼此能夠維持相 關係數(Correlation Coefficient)大於 0.9 的最大頻率差。加上接收端或傳送端的 移動,會造成通道隨著時間而有增強減弱的情形,此情形稱為通道的衰變 (Fading)。 如果一個訊號的傳輸頻寬大於其通道的同調頻寬,則這個訊號可被稱為寬頻 訊號,在時域上通道的不同路徑可被分別出來。由於訊號頻寬大於通道的同調頻 寬,造成在頻譜上每個頻率的衰變都不同,這樣的通道被稱之為頻率選擇性衰變 (Frequency Selective Fading)通道。
反之,如果傳輸訊號的頻寬小於同調頻寬,此訊號則稱做窄頻訊號。窄頻訊 號在時域上無法分辨出各路徑之訊號,而這樣的通道被稱之平緩衰變(Flat Fading)通道。 2.1.1 寬頻傳輸訊號之通道模型 一個寬頻傳輸訊號之通道模型可用多重路徑延遲來表示: 1 0 ( , ) ( ) ( ) L i i i h tτ r t δ τ τ − = =
∑
− (2.1) t 為時間,τi為第i 個路徑的延遲量,ri(t)為第i 個路徑的增益。接收機在一小 區域內所收到的每個路徑,都可看做來自各方向窄頻的複數訊號之和。每個路徑 之增益可以用複數訊號表示如下: , 1 ( ) , 0 ( ) ( ) i n N j t i i n n r t A t eφ − = =∑
(2.2)根據中央極限定理(Central Limit Theory),當 N 值很大時,ri(t)將近似於
一個高斯隨機程序(Gaussian Random Process)。因此複數訊號之振幅成 Rayleigh
分佈,Jake’s Model 就可用來描述 ri(t),將在下一節有較多的介紹。此外,通
道的每一條路徑彼此間也都是不相關(Uncorrelated)的,因此整個通道可以用 一個Gaussian Wide-sense-stationary Uncorrelated-scattering Channel 來作為通道 的模型。
2.1.2 窄頻傳輸之通道模型 當訊號的傳輸頻寬遠小於通道的同調頻寬,亦即通道的延遲遠小於訊號的 寬度(Pulse width),其經過之通道就可用窄頻通道模型來描述。在此情況下, 接收端無法分辨不同的路徑,而在傳輸的有效頻寬內通道的頻率響應幾乎是平的 (flat),通道對於訊號的影響將反映在接收訊號的振幅上。假設接收機在行進中 接收訊號,所接收訊號的振幅也會隨著時間和接收機移動的速度而改變,其振幅 r 的分佈可以由 Rayleigh 分佈來近似: < ≥ = − 0 0 0 ) ( 2 2 r r e r p N r N r (2.3) N 為其變異數(variance)。
使用 Jake’s Model 可以近似 Rayleigh 分佈,很適合用來描述一個窄頻傳輸的 通道模型。一個基頻等效(Equivalent Baseband)的窄頻衰變模型(Narrow Band Fading Profile)可以表示成來自 N 個方向之複數訊號和: n n N n t w j t j i f w e N E e t A t T n n n i π φ α θ 2 , ) ( ) ( 1 0 ] cos [ 0 ) ( = = =
∑
− = + (2.4) Ai(t)是振幅在時間 t 的衰變,θi(t)是隨機相位(Random Phase),E0是T(t)的平均 功率;fn,αn,φn分別是第 n 個路徑的最大都卜勒(Doppler)頻率偏移量,入射 角度,入射方向訊號之相位。假設αn 和 φn 在[0 , 2π]內均勻分佈(UniformDistribution)。只要N 夠大,上式之振福就可近似於 Rayleigh 分佈(Distribution)。
2.1.3 通道模型
利用2.1.1 節和 2.1.2 節中所介紹的通道模型,可模擬出寬頻傳輸之通道。假
設共有 L 個路徑,每個路徑的延遲為 τi,下圖就是一個利用時變(Time variant)
1
τ
∑
) ( 1( ) 1 t j e t A θ 2 τ ) ( 2( ) 2 t j e t A θ L τ 2τ
Lτ
Input ) ( ) ( j t L L e t A θ AWGN Output 圖2.1 產生多重路經衰變通道之模型 2.2 利用領航訊號通道估測方法 利用領航符元估計通道頻率響應的方法是指在每個符元頻率軸上的一些固 定次載波位置放置一些參考次載波訊號,利用這些參考次載波訊號作內插來估計 通道頻率響應,例如DVB-T 系統。這類通道估計的方法包含應用各種不同的內 插法來估計通道的頻率響應,我們將依次在以下五個次小節中分別介紹一維線性 內插法、兩種基於離散傅立葉轉換之一維內插法、基於離散傅立葉轉換之二維內 插法以及同時串連應用一維線性內插法和離散傅立葉轉換之一維內插法等等五 種估計通道響應的方法。同時,我們將以簡單的數學推導來說明這些方法的特性。 2.2.1 領航訊號之放置 假設一個長度為 TU的正交分頻多工有效符元,共有 N 個可用的次載波。 每隔Sf個次載波間隔放置一個參考次載波訊號P[k],P[k]稱為領航次載波訊號, 其他次載波位置上則放置要傳送的資料D[k]。如此第 k 個次載波位置上的訊號可 被表示為: ≤ ≤ ≠ − = ⋅ = = 1 N 0 , ] D[ 1 N ,...., 2 , 1 , 0 , ] P[ -k k k k S q S q k k k q f f q (2.5) 只要一個完整正交分頻多工符元的護衛間隔長度大於通道的最大延遲時 間,在沒有時序誤差的情況下(即取樣視窗內的資料是沒有碼際干擾的資料),每 個符元經過通道時和通道作用形成的線性旋積(Linear Convolution)就等效於環旋 積(Circular Convolution)。經過接收端的離散傅立葉轉換至頻率軸,等效於每個 次載波位置的資料和其通道頻率響應H[k]作乘績。假設符元時間及載波頻率偏移的同步動作皆完成的情況下,第 k 個次載波位置上的接收訊號為: ≤ ≤ ≠ ⋅ − = ⋅ = = ⋅ 1 N 0 , ] H[ ] D[ 1 N ,...., 2 , 1 , 0 , ] H[ ] P[ -k k k k k S q S q k k k k q f f q (2.6) 由於P[k]是已知的領航次載波訊號,因此可以在接收端得到所有次載波位置 為 kq的通道頻率響應值P[kq]。假設在次載波位置不為 kq的次載波上其值定為零, 則相當於得到通道頻率響應的取樣訊號。假設沒有白高斯雜訊(AWGN)存在,則 此通道頻率響應的取樣訊號估計值如下所示: ≤ ≤ ≠ − = ⋅ = = = 1 -N 0 , 0 1 N ,...., 2 , 1 , 0 , ] H[ ] [ H~ k k k S q S q k k k k q f f q (2.7) 經由內插法(Interpolation)就可以估計出整個通道的頻率響應。我們定義∆f 是兩個相鄰次載波之間的頻率間隔,其相當於每個有效OFDM 符元長度 TU的倒 數。則此通道頻率響應取樣訊號在頻率軸上的取樣率必須大於通道的最大延遲時 間,以避免時間軸上重疊(Aliasing)現象的發生,此條件可表示如下: MAX f MAX f f S S ⋅∆ >τ ⋅ ⇒ >τ N T 1 (2.8) MAX τ 個 取 樣 時 間 是 通 道 的 最 大 延 遲 時 間 , 和 通 道 同 調 頻 寬(Coherent Bandwidth)成反比,而 T 為訊號的取樣時間。 如果傳輸的通道並非固定不變,則接收機就必須每隔一段時間(例如是 St個 完整OFDM 符元時間)估計一次通道,其中 St的大小則取決於通道響應在時間軸 上變化的快慢。通道響應在時間軸上的變化通常是因為接收機移動造成都卜勒 (Doppler)頻率偏移,其結果是相位的改變及振幅大小的衰變。都卜勒頻率偏移量 則和通道的同調時間(Coherent Time)成反比,和車速成正比。如果車速愈快則都 卜勒頻率偏移量愈大,通道的變化也愈快,所以估計通道響應的時間間隔要愈 短,因此需要較小的 St 值。同樣地,通道頻率響應取樣訊號在時間軸上的取樣 率必須大於兩倍的通道最大都卜勒頻率偏移量以避免頻率軸上重疊(Aliasing)現
2.2 為放置參考次載波訊號的例子,實心點為參考次載波訊號而空心點為資料次 載波訊號,此例中St為4 而 Sf為5,如下所示: Frequency Time ) (TSYM ) ( f∆ 圖2.2 參考訊號在時間軸及頻率軸上放置情形的示意圖 如此每St個完整OFDM 符元時間估計一次通道響應,且在這 St個完整OFDM 符元時間內等化器都採用相同的通道估計值。在通道變化較快速的情況下,除了 選擇較小的St值外,利用二維內插法(Two-Dimensional Interpolation)[4][5]也可提 高通道估計的準確度。 以數位影像廣播之地面廣播系統(DVB-T)的散射領航次載波訊號為例,St為 1 而 Sf為12。若通道最大延遲時間以最長的護衛間隔( TU 4 1 )計算,則等式(2.8) 並不會被滿足。但若在收到四個完整 OFDM 符元時間的取樣訊號後,先完成時 間維度上的估計,則St為1 而 Sf 縮小為3,此時就可以滿足等式(2.8)。這個方 法我們將在下一節說明。 2.2.2 一維通道估測 2.2.2.1 一維線性內插法[17] 要回復每個領航次載波之間其他次載波位置的通道頻率響應值,最簡單的方 法就是採用一維線性內插法。在第 k 個次載波位置的通道頻率響應值可由其相鄰 領航次載波訊號之次載波位置上的通道響應取樣值經由下式得到: f f f f f f f i S k i S S S i k S i S i S i k]=H[ ⋅ ]+{H[( +1)⋅ ]-H[ ⋅ ]}⋅ − ⋅ for ⋅ ≤ ≤( +1)⋅ H[ (2.10) 一維線性內插法的優點在於方法簡單但相對地準確度較低,較適用於估計沒 有劇烈變化起伏的通道頻率響應。 2.2.2.2 一維快速傅立葉轉換內插法(I)[6,7,8] 如前一節所述,利用已知次載波位置上的領航次載波訊號我們可以得到通道
頻率響應的取樣訊號。這個取樣訊號為一筆長度為N 個取樣的數列 H~: } 0,...,0 ], 1) -N H[( 0, 0,...., ], H[2 0, ...., 0, ], H[ 0, .., 0, H[0], { H~ f f f f S S S S = (2.11) 假設 f S N 是整數且 f S N 個取樣時間長度大於通道響應的最大延遲時間,根據 離散傅立葉轉換的特性,等式(2.11)經過反離散傅立葉轉換(至時域),可以得到 Sf 個等距且重複出現的訊號,其大小等於真實通道脈衝響應的 1/Sf ,以下將會 說明這個特性。H[k]是完整的通道頻率響應, h(n)則是通道時域上的脈衝響應; 而H~[k 則是通道頻率響應的取樣訊號,] h~(n)則是通道時域上的脈衝響應取樣訊 號。其中訊號在時域和頻域之間的關係如下所示: ] [ H~ ) ( ~ , ] H[ ) ( DFT DFT k n h k n h → → (2.12) 而H[k] 和H~[k 的關係和等式(2.7)相似,如下所示: ] = + ⋅ = − = otherwise 0 1 N ,...., 2 , 1 , 0 , for ] H[ ] [ H~ f f S q S q a k k k (2.13) 假設上式中的 a、q、Sf 和 f S N 都是整數,a 為此取樣訊號的起始次載波位置, 則H~[k 經過反離散傅立葉轉換之結果可經由下式推導: ]
∑
∑
= ⋅ + = ⋅ ⋅ + = ⋅ = 1 -N 0 ) ( N 2 1 -N 0 N 2 e ] H[ N 1 e ] [ H~ N 1 ) ( ~ S n S q a j f k kn j f f S q a k n h π π此等式由兩層加法組成,後面的那層加法可以化簡如下: ) ) N (( otherwise 0 integer) an is (z N for 1 e N 1 1 0 N 1 -N 0 N 2
∑
∑
− = = ⋅ − ⋅ − = = ⋅ = f f f S z f f S q x q S j f S z x S z x S δ π Q (2.14b)∑
∑
∑
− = = − ⋅ − = − ⋅ − ⋅ − − = = ∴ 1 0 N 1 -N 0 ) ( N 2 1 -N 0 ) ( N 2 ) ) N (( N e e f f f f f S z f f S q n x q S j S q n x S q j S z n x S δ π π (2.14c) 將等式(2.14c)代入等式(2.14b)中,等式(2.14a)可以繼續化簡為:∑
∑
∑
∑
∑
= − = = − − = = − ⋅ − − − ⋅ ⋅ + = ⋅ − − ⋅ = ⋅ = 1 -0 2 N 1 -N 0 1 -0 N ) ( N 2 1 -N 0 1 -N 0 ) ( N 2 ) ( N 2 e ) ) N ( ( 1 ) ) N (( N e ) ( N 1 e e ) ( N 1 ) ( ~ f f f f f S z az S j f f x S z f f n x a j x S q n x S q j n x a j S z n h S S z n x S x h x h n h π π π π δ (2.14d) 由上述推導可看出,當通道的最大延遲時間小於 f S N 個取樣時間長度時,經 過反離散傅立葉轉換後會重複出現 Sf 個通道脈衝響應;但若通道的最大延遲時 間大於 f S N 個取樣時間時,各個重複出現的通道脈衝響應會發生時間軸上重疊的 現象。因此領航次載波訊號在頻率軸上放置的密度必須滿足等式(2.8),即是要 確保通道的最大延遲時間在有效符元長度的1/ Sf 以內。 圖2.3 是上述方法的示意圖。圖 2.3 (a)為完整的通道脈衝響應與頻率響應示 意圖,兩者間存在 N 點快速傅立葉轉換之關係。圖 2.3 (b)為通道響應的取樣過 程。由領航次載波位置上所得到的通道頻率響應的量值,相當於是得到通道頻率 響應的取樣訊號。此通道頻率響應的取樣訊號在時域上等同於通道的脈衝響應和 一個連串的脈衝波(Impulse Trains)作環旋積的動作。通道的脈衝響應和一個連串 的脈衝波作環旋積則相當於通道的脈衝響應在這個連串脈衝波的位置上複製如 圖2.3 (c)所示。由圖 2.3 (c)可知,當通道的最大延遲時間小於 f S N 個取樣時間時, 各個複製的通道脈衝響應不會互相重疊干擾,我們可以使用一個時域上的低通濾波器取出第一個通道的脈衝響應,此即為通道脈衝響應的估計值。 ) (n h H[k] spacing) (carrier ncy Freque (sample) Time → FFT ←IFFT MAX τ (sample) Time f S N 0 f S 2N f f S S 1)N ( − MAX τ spacing) (carrier ncy Freque f S → FFT ←IFFT ) (n p (sample)Time ) (n h (sample)Time MAX τ
⊗
] [ H~k f S N ) ( ~ n h (a) (b) (c) 圖2.3 (a)完整通道響應 (b)通道響應的取樣過程 (c)通道脈衝響應之取樣訊號 2.2.2.3 一維快速傅立葉轉換內插法(II)[9,10,11] 在此我們將介紹另一種利用離散傅立葉轉換特性之通道估計方法。如同在上 一節所描述,於頻率軸上每隔 Sf 個次載波間隔就放置一個領航次載波訊號,在 接收端收到一個長度為 N 個取樣的正交分頻多工符元並完成訊號同步後,我們 可以取出此 f S N 個領航次載波位置上的通道頻率響應估計值。這組長度為 f S N 個 取樣的訊號經過 f S N 點的反離散傅立轉換後,其結果等於完整通道脈衝響應的前為: 1 N ,...., 2 , 1 , 0 for ] [ H ] [ H~′ = + ⋅ = − f f S q S q a k (2.15) 同樣地假設 f S N 是整數而 a 為領航次載波的起始位置,則H~′[k]經過 f S N 點的反離 散傅立葉轉換之結果h ′~(n)如下所示: e N 1 e ) ( e e ) ( N 1 e ] H[ N 1 e ] [ H~ N 1 ) ( ~ 1 -N 0 1 -N 0 ) ( N 2 ) ( N 2 1 -N 0 ) ( N 2 1 -N 0 ) ( N 2 1 -N 0 ) ( N 2 1 -N 0 N 2
∑
∑
∑∑
∑
∑
= = − ⋅ − − − = ⋅ + = ⋅ + − = ⋅ + = ⋅ = ⋅ ⋅ = ⋅ ⋅ + = ⋅ ′ = ′ x S q n x S q j f n x a j S q n S q a j x x S q a j f S q n S q a j f f S k kn j f f f f f f f f f S x h x h S S q a S k S n h π π π π π π (2.16a) 將等式(2.14c)代入等式(2.16a)中,等式(2.16a)可以繼續簡化為: f MAX f S z az S j f x S z f n x a j x S q n x S q j f n x a j S S n n h S z n h S z n x x h S x h n h f f f f f N and 1 -N ., 0,1,2,.... for ) ( e ) ) N (( ) ) N (( e ) ( e N 1 e ) ( ) ( ~ 1 0 2 N 1 -N 0 1 0 N ) ( N 2 1 -N 0 1 -N 0 ) ( N 2 ) ( N 2 < = = ⋅ + = ⋅ − − ⋅ = ⋅ = ′∑
∑
∑
∑
∑
− = − = − = − − = = − ⋅ − − − τ δ π π π π (2.16b) 因此只要通道脈衝響應 h(n)的最大延遲時間長度小於 f S N 個取樣時間,再將等式 (2.16b)所得到的訊號h ′~(n)的後端補上零使其變成長度為N 個取樣的訊號,則 在沒有白高斯雜訊的情形下此訊號完全等同於通道的脈衝響應。我們可以由此方 法得到通道脈衝響應的估計值,即是可以得到通道頻率響應的估計值。2.2.3 二維通道估測 2.2.3.1 二維快速傅立葉轉換內插法[4,5,6] 由於OFDM 接收機的移動,或者週遭環境的改變,通道會隨著時間而變化。 以圖2.2 為例,所有的一維內插法都只利用頻率軸方向的通道資訊,如果能夠同 時利用時間軸及頻率軸兩個維度的通道資訊,利用二維內插法還原通道,可以更 正確地掌握通道響應在時間軸上的變化。 類似一維傅立葉轉換估計通道響應的方法,此時我們將幾個有效OFDM 符 元看成一整個區塊來處理。在每個區塊中,所有領航次載波位置上的量值即是通 道響應的取樣值,同時我們將不是領航次載波位置上的量值設為零,如此這個區 塊的訊號可以看成是通道響應的二維取樣訊號。將這個區塊訊號經過二維反離散 傅立葉轉換,其結果也會有通道響應訊號複製的情形出現。通道響應訊號在一個 區塊中重複出現的位置和次數則是由領航次載波訊號的排列方式決定。經由下列 數學式的推導我們可以得到通道響應訊號轉換後的結果。 H[m,n] 是指在第 m 個符元中第 n 個次載波位置上的通道響應量值,h(k,l) 則 是此二維區塊訊號H[m,n] 經過二維反離散傅立葉轉換的結果,二者關係如下: ) , ( ] , H[ 2D-IDFT l k h n m → (2.17a) 其中H[m,n]和 h(k,l)的數學關係式為:
∑∑
= = − − ⋅ ⋅ =M-1 0 1 -N 0 N 2 M 2 ) , ( ] , H[ k l nl j mk j e e l k h n m π π (2.17b)∑∑
= = ⋅ ⋅ ⋅ = M-1 0 1 -N 0 N 2 M 2 ] , H[ N M 1 ) , ( m n nl j mk j e e n m l k h π π (2.17c) 等式(2.17b)及(2.17c)是二維離散傅立葉轉換及二維反離散傅立葉轉換的 關係式。這兩個等式是將M 個符元當作一個區塊來處理,每個符元共有 N 個次 載波。將這個區塊訊號中領航次載波位置的量值取出當作二維通道響應的估計值 且其它次載波位置上的量值補零,則可以得到另一個區塊訊號H~[m,n]。這個區] , [ H~ m n 經過二維反離散傅立葉轉換後,其訊號h~(k,l)如下所示:
∑∑
∑ ∑
∑ ∑ ∑∑
∑ ∑
∑∑
= = = = − − − − = = = = = = = = ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = − − 1 -M 0 1 -N 0 1 -M 0 1 -N 0 ) ( N 2 ) ( M 2 1 -M 0 1 -N 0 N 2 M 2 1 -M 0 1 -N 0 1 -M 0 1 -N 0 N 2 M 2 1 -M 0 1 -N 0 n N 2 M 2 e e ) ( N M 1 e e } e e ) ( { N M 1 e e ] , H[ N M 1 e e ] , [ H~ N M 1 ) , ( ~ N 2 M 2 x y S p S q l y q S j k x p S j S p S q ql S j pk S j x y S p S q ql S j pk S j f t m nl j mk j t f f t t f f t qy f S j px t S j t f f t x,y h x,y h qS pS n m l k h π π π π π π π π π π (2.19a) 等式(2.19a)和等式(2.14)相似,可以繼續化簡。等式(2.19a)的後面兩個加法 可以轉換如下:∑ ∑
∑ ∑
− = − = = = − − − − ⋅ − − ⋅ − − = ⋅ ⋅ ⋅ ⋅ 1 0 1 0 M N 1 -M 0 1 -N 0 ) ( N 2 ) ( M 2 ) ) N ( , ) M (( e e N M 1 t f t f f t S r S s t f S p S q l y q S j k x p S j f t S s l y S r k x S S δ π π (2.19b) 將等式(2.19b)代入等式(2.19a),則等式(2.19a)可以化簡為:∑ ∑
∑∑
∑ ∑
∑∑
∑ ∑
− = − = = = − = − = = = = = − − − − ⋅ + ⋅ + ⋅ = ⋅ − − ⋅ − − ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = 1 0 1 0 N M 1 -M 0 1 -N 0 1 0 1 0 N M 1 -M 0 1 -N 0 1 -M 0 1 -N 0 ) ( N 2 ) ( M 2 ) ) N ( , ) M (( 1 ) ) N ( , ) M (( N M ) ( N M 1 e e ) ( N M 1 ) , ( ~ t f t f t f f t S r S s t f f t x y S r S s t f f t x y S p S q l y q S j k x p S j S s l S r k h S S S s l y S r k x S S x,y h x,y h l k h δ π π (2.19c) 由等式(2.19c)可看出,訊號h~(k,l)在 k 軸上會重複 St次而在 l 軸上會重複 Sf 次,所以在整個區塊訊號中會有St ⋅ Sf個重複的訊號。如果領航次載波訊號的 排列夠密,也就是滿足等式(2.8)和等式(2.9)取樣定理的條件,則可以確保 上述的區塊訊號中,重複出現的訊號彼此間不會重疊在一起。如此一來,在沒有 白高斯雜訊存在的情形下,我們可以使用二維低通濾波器將訊號 h(k,l) 取出。把 訊號 h(k,l) 經過二維離散傅立葉轉換即可得到通道響應的估計值 H[m,n]。2.2.3.2 串連型一維線性內插與一維快速傅立葉轉換內插法[17] 基於離散傅立葉轉換的二維內插法可以較準確地掌握隨時間而改變的通道, 但二維離散傅立葉轉換的計算量相當龐大,相對地硬體架構也較複雜。在運算 量、複雜度等成本的考量下,利用離散傅立葉轉換的二維內插法較不易實現。 通常通道的頻率響應,在頻率軸上訊號的變化幅度,往往遠大於在時間軸上 的變化,因此並不需要在兩個維度同時使用如此高解析度卻複雜的內插法。相反 地,我們可以把二維內插法利用兩個串連的一維內插法來實現。在時間軸上由於 訊號變化緩慢,一些簡單的方法就可有相當準確的估計,在頻率軸則可實行一些 較高解析度的內插法。在這裡我們提出先利用一維線性內插法來估計通道在時間 軸上的變化,再利用離散傅立葉轉的一維內插法來還原通道的頻率響應。圖 2.4 中原本 St等於二而 Sf等於六。若我們先利用一維線性內插法來估計通道在時間 軸上的變化,則此時 St變為一而 Sf變為三。這樣一來通道響應的取樣訊號在頻 率軸上變的更緊密,也更能忍受較大的通道延遲時間。 Linear Interpolation in Time Frequency Time ) (TSYM ) ( f∆ Frequency Time ) (TSYM ) ( f∆ 圖2.4 時間軸上先做內插法的通道響應取樣訊號示意圖 2.2.4 適應性估計通道方法 2.2.4.1 線性最小均方差通道估測法 [18,19] 在此我們要介紹另一種通道估測方法,線性最小均方差通道估測法,首先我們假 設要估測的通道HˆLMMSE和接收到的信號 Y 彼此之間呈一線性的關係,即: Hˆ =KY,而且通道和雜訊之間是無相關的(uncorrelated),則真實通道與估計
其中 RHY =E[HY H ] =E[H(XH+Z)H] =E[H(HHXH+ZH)] =E[HHHXH+HZH]] =E[HHH ]XH+E[HZH]=RHHX H (2.22) N Z H HH H H H YY I X XR ZZ E Z XH Z XH E YY E R 2 H H ] [ ]X XE[HH ] ) )( [( ] [ σ + = + = + + = = (2.23) 將(2.22)、(2.23)代入(2.21)可得到通道的頻率響應: LS H Z HH HH N Z H HH H HH YY HY LMMSE H X X R R Y I X XR X R Y R R H ˆ ) ) ( ( ) )( ( ˆ 1 1 2 1 2 1 − − − − + = + = = σ σ (2.24) 其中HˆLS為Least square 的通道估計。 在這個方法中我們可以看到需要知道通道的autocorrelation,但實際上通道 是未知的,我們很難去知道通道的 autocorrelation,另一方面由式 (2.22)可知這 種方法隨X 的改變必須不斷的去計算 (X HX)-1這個反矩陣的值,這將使系統變得 更為複雜。因此我們在下一節要介紹的是一種改良式的線性最小均方差通道估測 法,它比傳統的LMMSE estimator 更為簡單,而且它不必事先知道通道的統計特 性,這將使我們在實際的應用上更為容易。 2.2.4.2 改良式線性最小均方差通道估測法[16] 本節我們將介紹一改良式的線性最小均方差通道估測方法,這個方法我們不 必事先知道通道的統計特性。首先,我們假設欲估計的通道與h 間呈一線性的LS 關係,即 ˆ ˆ LMMSE LS h =h k (2.25) 其中 )]) 1 ( ˆ , ), 1 ( ˆ ), 0 ( ˆ ([ ˆ ] , , , [ 0 1 1 − = = − N h h h diag h k k k k LS LS LS LS T N L L (2.26) 因此,可計算出均方誤差為
(2.27) 同理我們們要找出一 k 使得估計通道與真實通道間的均方誤差(ε)最小 (2.28) 令式(2.28)為零, 可得 其中 ]) } | {| , , } | {| , } | {| ([ )] ( ) ( [ )] ( ) ( [ )] ( ) ( [ ] ˆ ˆ [ 2 2 1 2 2 1 2 2 0 z z N z H H H LS H LS h E h E h E diag z diag z diag E h diag h diag E z h diag z h diag E h h E σ σ σ + + + = + = + + = − L (2.30) 2 2 2 0 1 1 ˆ [ ] [ ( ) ] = [ ( ) ] =[ { }, { },..., { }] H H LS H T N E h h E diag h z h E diag h h E h E h E h − = + 將式(2.30)、式(2.31)代入式(2.29),可得 假設通道和雜訊為uncorrelated,即 {| | } |2 ˆ |2 ˆ2 LS z E h ≈h −σ ,代入(2.32)可得 2 ˆ [ ] ˆ ˆ = [( ) ( )] LS H LS LS E h h k E h h k h h k ε = − − −
{
}
*( ) * [( ˆ ) ( ˆ )] ˆ ˆ [ ( )] ˆ ˆ ˆ [ ] [ ] H k LS LS k H LS LS H H LS LS LS E h h k h h k E h h h k E h h E h h k ε ∇ = ∇ − − = − − = − + *( ) 0 k ε ∇ = 1 ˆ ˆ ˆ { [ H ]} [ H ] LS LS LS k = E h h − E h h 1 2 2 2 0 1 1 2 2 2 2 2 2 0 1 1 ˆ ˆ ˆ { [ ]} [ } { } { } { } = , ,..., { } { } { } H H LS LS LS T N z z N z k E h h E h h E h E h E h E h σ E h σ E h σ − − − = + + + 2 2 2 T (2.29) (2.31) (2.32)其中hˆLS為least square channel estimation,而 2 z σ 為 由式(2.34)可看到,這種改良式的線性最小均方差通道估測方法我們只需要知道 least square 的通道估測和雜訊的能量,如此一來即可大大的簡化計算的複雜 度。在這樣的方法中,我們假設hˆLMMSE =h kˆLS ,這可以看成是將hˆLS 經過一個
one-tap 的濾波器所得到的結果,我們知道hreal =hˆLS+z,也就是說傳統的 lease
square 通道估計是無法有效濾除雜訊的干擾的,因此我們將它再經過一個 one-tap 濾波器”k ”做濾波,如此一來可以更進一步的抵抗雜訊所造成的干擾,由 式(2.34)可看出 k 其實就是一個加權值,當雜訊的能量相較於通道的能量越大
時,其所得的加權值越小,反之則相反。因此這種方法將比least square estimation
的方法更能有效的抵抗雜訊,而且它的複雜度並不比 least square 的方法高出許
多。
2.2.4.3 通道路徑的選擇(Path Selection)
為了能更進一步的濾除雜訊的效應,我們必須做通道路徑的選擇,在一般的 正交分頻多工系統中,我們往往假設通道的最大延遲會小於時間護衛的長度,如 此一來方可避免碼際干擾(Inter Symbol Interference)的效應,因此我們可以進一步
將通道中大於時間護衛長度的值都視為是雜訊並令之為零,如圖2.5 所示。 0 1 1 2 2 2 1 2 2 2 2 2 2 0 1 { } { } { } , ,..., { } { } { } T LS LS LS N sub optimum LS LS LS z z N z E h E h E h k E h σ E h σ E h σ − − − = + + + 1 2 2 1 ˆ ˆ ( ) g N z LS n N g h n N N σ − = = −
∑
(2.34) (2.35)圖2.5 通道之最大延遲小於等於時間護衛 在2.2.2.2 節或 2.2.3.1 節中所提到的基於快速傅立葉轉換內差法中,估出的通道 在時域是重覆的出現的,如同圖2.6 所示: 圖2.6 取樣後訊號經過反離散傅立葉轉換之結果:出現 Sf 組大小變為原本頻率 響應1/ Sf 的訊號 因此,在做路徑選擇時,第一步我們必需先將t> f S N 的點其值設為0,儘管如此, 通道中 t< f S N 的值還是有可能包含雜訊,因此,我們可以用一個簡單的方法來 判別,首先,在 t< f S N 的點中找出一最大值的路徑,利用這最大的值我設定一 門檻值,當路徑的能量小於這個門檻值時,該路徑即被視為是雜訊,反之則視為 通道,因此,式2.35 可以改寫成
其中L 為選中為 path 的總數,l 則為選中 path 的 index。
因此將通道路徑的選擇應用在式(2.34)可得 因此整個改良式線性最小均方差通道估測法的流程圖可由圖2.7 所表示 0 1 1 1 1 0 2 2 2 2 2 2 2 2 2 { } { } { } , ,..., { } { } { } L L T LS LS LS l l l l LS LS LS l z l z l z E h E h E h k E h E h E h
σ
σ
σ
− − = + + + (2.37) 2 2 1 ˆ ˆ ( ) / z LS n l f h n N S L σ ∉ = −∑
(2.36)2.2.5 用於 DVB-T 系統的通道估測法 數位影像廣播系統利用每個符元中的散射領航訊號來估計通道: 圖2.8 數位影像廣播系統散射領航訊號之排列 這個系統共有兩個操作模式,2K 模式(每個符元 2048 個次載波)與 8K 模 式(每個符元 8192 個次載波)。兩種操作模式的 Kmin 皆為 0, Kmax則分別為1704 與 6816。每個散射領航訊號的值只和它所在的次載波位置有關(即不同符元但 相同次載波位置的散射領航訊號仍有相同的值)。上述的一維離散傅立葉轉換內 插法、二維離散傅立葉轉換內插法、串連一維內插法與一維離散傅立葉轉換法以 及線性最小均方差法都適用於這個系統,並使用快速傅立葉轉換以增加運算的速 度,在此將針對每種方法有較詳細的介紹: 2.2.5.1 一維快速傅立葉轉換內插法 圖2.9 為接收端一維快速傅立葉轉換通道估計示意圖,假設在接收端碼框位 置及頻率皆已同步。 圖2.9 基於一維快速傅立葉轉換之通道估計 首先必須估計出所有領航訊號上的通道取樣,其他非散射領航訊號位置的值
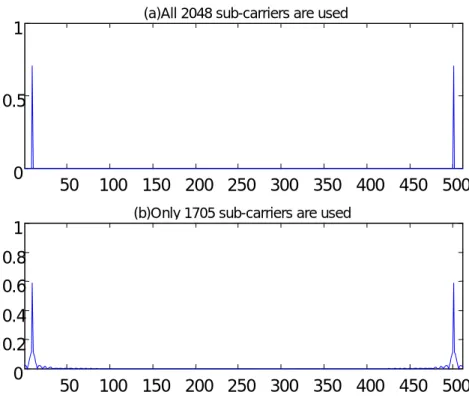
則設為0,接著對這組訊號作一維反快速傅立葉轉換,如果系統是2K 模式則反 快速傅立葉轉換的點數為2048,若系統操作在8K 模式下則為8192 點。由於一 個符元只用了Kmax 個次載波載,為了要做N 點的快速傅立葉轉換,補0 使其長 度變為N。這樣子的動作相當於在原本長度為N 的通道頻率響應乘上一個長度為 Kmax 的方波;在時域則等效和一個sinc 函數作環捲積,因此必須補償這個環捲 積效應。 取出這個時域訊號的前N/12 點並乘上12,通道響應就已經被還原了。但實 際的情況下訊號經過通道會加上雜訊,且頻率的同步如果出現誤差,每個次載波 上的訊號還會受其他次載波上訊號干擾(Inter Carrier Interference)。這些都會使 估計的準確度降低。因此在這之後還需要經過一些處理來降底雜訊及干擾。經由 平均數個連續的符元(Symbol-by-symbol average)可以降低雜訊及干擾的能量(必 須確定通道在這幾個符元內沒有太大的改變)。 在經過平均後的通道估計,再經由「路徑選擇」(Path Selection)還可再減 少一些雜訊及干擾。路徑選擇其實就是一個區分雜訊與通道估計的動作。首先必 須設定一個區別雜訊的門檻,在時域通道響應估計的每個取樣點能量只要小於這 個門檻就把它視為雜訊並捨去。 最後再經由快速傅立葉轉換就可以得到通道頻率響應估計值。這種估計法適 用於通道的最大延遲小於整個有效符元長度的12 分之一。 2.2.5.2 二維快速傅立葉轉換內插法 二維內插法可以更準確地估出時變的通道頻率響應,以下將以2K 模式為 例,以四個符元當作一個區塊處理為例,利用4*2048 點數的二維快速傅立葉轉 換來估計通道,其步驟如下圖 2.10 所示:
元的通道頻率響應。 2.2.5.3 串連一維線性內插與一維快速傅立葉轉換法 前述的兩個方法都必須滿足通道的最大延遲小於整個有效符元的1/12。通常 由一個OFDM 系統每個符元的保護區段長度,可以得知系統可容忍的最大通道 延遲。而數位影像廣播系統共有四種不同長度的保護區段,最長可到有效符元的 1/4,當最大延遲是1/4 有效符元長度時,前述兩種方法就不適用,必須使用其它 的方法來估計通道。如果首先利用線性內插法估計時間軸的通道響應,由於系統 的散射領航訊號的特殊排列方式,會使得每個符元中的領航訊號的密度會變為原 來的4 倍。 圖2.11 經過線性內插法估計出時間軸通道響應的散射領航訊號 由上圖看出,可容忍的通道延遲由原本的1/12 增加為1/3 個有效符元長度。 圖2.12 兩串連一維線性內插及快速傅立葉轉換法 2.2.5.4 用於 DVB-T 系統的改良式線性最小均方差通道估測法 在DVB-T 的標準中用的是散射領航訊號來估計通道,因此我們只能知道特 定次載波位置上的hˆLS,但在2.2.4.2 所題到的改良式線性最小均方差通道估測法 卻必須知道完整的hˆLS,因此我們可以利用2.2.3.2 節中所提到的串連型一維線性
內插與一維快速傅立葉轉換內插法方法來求得完整的hˆLS,接著再做2.2.4.2 中的 線性最小均方差通道估測法,整個流程圖如圖2.13 所示 Remove Guard Interval FFT LS channel estimation samples Linear Interpolation in Time Axis IFFT Path Selection Estimate noise Power LMMSE weighting Zero Padding 圖2.13 用於 DVB-T 系統的改良式線性最小均方差通道估測法