多元衛星雷達影像於臺灣北部 執行PS-InSAR之研究 - 政大學術集成
86
0
0
全文
(2) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v.
(3) 致謝 在完成這本論文的長長路上,感謝我的指導老師林士淵,從一開始任 由我選擇了一個在國內較不為人熟知的題材,並在過程中不斷的為我找尋 瓶頸後的出路,縱使前方的路我們一無所知,老師還是一路支持並帶領我 們突破再突破。在這一段摸索的過程中,老師給予了我不同於我認知的「夥 伴關係」 ,不再是那些刻板的老師傳授學生學的模式,而是指導我自行推理、 思考以及嘗試、印證,影響了我這一輩子做事、思考、表達的方式,改變了 我的一生。. 治 政 大 老師、中央大學吳究老師、成功大學蔡展榮老師以及楊佳祥學長、台灣大學 立 胡植慶老師、林耕霈同學以及童忻學姊,感謝你們對於 SAR 相關知識無私 SAR 在臺灣可以說是一塊非常小卻又專業的領域,感謝高應大謝嘉聲. ‧ 國. 學. 的付出與幫助,我們才得以完成這一篇論文,為後起之輩提供一點貢獻。. ‧. 感謝我的老爸老媽,雖然我了解你們完全不知道我在研究所念的是什 麼、做的是什麼,但是你們還是願意支持我,給予我在精神上強大的支持與. y. Nat. sit. 安慰;我所愛的地政系女籃陪伴我走過大大小小的歡樂和緊繃,看著不同. al. er. io. 階段的學妹們有著我的從前的模樣,就感到自己心中充滿著希望,也要求. v i n Ch 湯舜閔、洪連吉,感謝研究所的大家給我的支持和歡樂;特別感謝洪翊甯的 engchi U n. 自己可以成為他們的榜樣,也讓他們看見希望;感謝學弟廖思睿、洪翊甯、. 爸爸、媽媽,在我去高應大研習的時候無償提供我住所以及代步工具,多次 打擾你們的生活,還給予我無限的關心,實在萬分感謝:林文喻這一個好朋 友,感謝你在我悲傷和難過的時候給我無法言喻的感動,我知道我們好朋 友的關係會是一輩子的。 最後感謝在作為一個研究生的時光裡,你一直相伴我左右的詹宛庭, 在我因為資格考大哭的時候安慰我,在我因為研究待到三更半夜時陪伴我, 在我期初、期末報告緊張時安撫我,你帶給我的不只是一篇論文,是更長遠 的感動,而我一輩子會記得。.
(4) 沒有前述的你們,就沒有現在的我以及這一本論文,謝謝你們。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v.
(5) 摘要 許多研究已證實 PS-InSAR 技術可藉由長時間序列中的永久散射點之 變化量,準確獲取地表變動速度。然各衛載雷達系統所選用的雷達波長不 盡相同,其對於地表各擁有不同的散射特性,而此特性使得各類衛星雷達 影像所得到的 PS-InSAR 成果不盡相同。 本研究為探求不同雷達影像類型所得到的 PS-InSAR 成果的差異,以 臺灣北部為實驗區,利用 ERS-2、ENVISAT ASAR 與 ALOS PALSAR 三類 型衛星雷達影像,以 StaMPS V3.2 軟體執行 PS-InSAR 技術。結果成功於臺. 政 治 大 變化量。而後並以經濟部水利署所建置之地層下陷資料檢核地表變動成果, 立. 灣西北部及宜蘭平原等地區獲取大量的 PS 點,同時獲得該 PS 點位之地形. ‧ 國. 學. 得到與水準資料相似的變化趨勢,顯示出 PS-InSAR 於各雷達影像獲取之 時間點,解算大面積地表變化量的優勢。. ‧. n. al. er. io. sit. y. Nat. 關鍵字:PS-InSAR、ERS-2、ENVISAT、ALOS、臺灣北部. Ch. engchi. I. i n U. v.
(6) Abstract Permanent Scatterer Synthetic Aperture Radar Interferometry (PS-InSAR) has been proved as a useful technique for detecting ground surface deformation with up to centimeter level precision. Although the displacement velocity could be derived, the characteristics of PS-InSAR processing with different kinds of SAR data over different land cover types remained unclear. For the purpose of the detection and monitoring of surface processes, and to find the characteristics of PS-InSAR analysis with multiple SAR image data, we employed C-band ERS 2 and ENVISAT ASAR data, and L-band ALOS PALSAR images covering Northern Taiwan for PS-InSAR processing. As a result, the displacement velocity. 政 治 大 respectively. Moreover, the results were validated using ground surveying data. 立 At last, the implementation of PS-InSAR using three types of SAR data was. field of the testing area using ERS-2, ASAR and PALSAR data was obtained. ‧ 國. 學. discussed and summarised.. Nat. n. al. er. io. sit. y. ‧. Keywords: PS-InSAR, ERS-2, ENVISAT, ALOS, Northern Taiwan. Ch. engchi. II. i n U. v.
(7) 目錄 摘要 .............................................................................................................. I 目錄 ........................................................................................................... III 圖目錄 ....................................................................................................... IV 表目錄 ....................................................................................................... VI 第一章 緒論 .............................................................................................. 1 第一節 研究背景與動機 ........................................................................ 1 第二節 研究目的 .................................................................................... 3. 政 治 大. 第三節 研究方法及流程 ........................................................................ 4 第四節 章節架構 .................................................................................... 5. 立. 第二章 理論基礎與文獻回顧 .................................................................. 7. ‧ 國. 學. 第一節 合成孔徑雷達 ............................................................................ 7 第二節 合成孔徑雷達干涉 .................................................................. 11. ‧. 第三節 合成孔徑雷達差分干涉 .......................................................... 20 第四節 永久散射點雷達差分干涉 ...................................................... 28. Nat. sit. y. 第五節 小結 .......................................................................................... 37. er. io. 第三章 研究方法 .................................................................................... 39. al. n. v i n Ch 第二節 研究工具 .................................................................................. 45 engchi U 第一節 資料選取 .................................................................................. 39. 第三節 PS-INSAR 處理流程 ................................................................ 46 第四章 研究成果及分析 ........................................................................ 49 第一節 實驗成果 .................................................................................. 49 第二節 PS-INSAR 成果檢核 ................................................................ 59 第五章 結論與建議 ................................................................................ 67 參考文獻 .................................................................................................... 69 附錄 1. 臺北市主幹線 31 個水準點位歷年高程變動量. III.
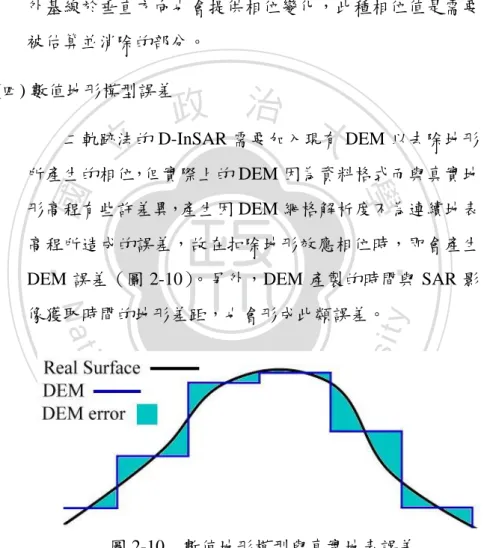
(8) 圖目錄 圖 1-1. 研究流程圖 ................................................................................... 4. 圖 2-1. 電磁光譜 ....................................................................................... 8. 圖 2-2. 雷達波的植被穿透力 ................................................................... 9. 圖 2-3. 太空梭雷達製圖任務 ................................................................. 11. 圖 2-4. 橫軌式幾何示意圖 ..................................................................... 13. 圖 2-5. 全相位回復示意圖 ..................................................................... 13. 圖 2-6. 沿軌式幾何示意圖 ..................................................................... 14. 雷達干涉幾何示意圖 ................................................................. 16. 學. 圖 2-8. ‧ 國. 圖 2-7. 政 治 大 重複軌道式幾何示意圖 ............................................................. 15 立. 圖 2-9 D-InSAR 幾何示意圖 ................................................................. 21. ‧. 圖 2-10. 數值地形模型與真實地表誤差 ............................................... 26. Nat. sit. y. 圖 2-11 人工角反射器示意圖 ............................................................... 28. 圖 3-1. 研究範圍 ERS-2、ASAR 雷達影像示意圖 .............................. 41. n. al. er. 永久散射體效果示意圖 ........................................................... 29. io. 圖 2-12. Ch. engchi. i n U. v. 圖 3-2 DESCW 查詢影像資訊 .............................................................. 42 圖 3-3. 研究範圍 PALSAR 雷達影像示意圖 ........................................ 44. 圖 3-4 StaMPS PS-InSAR 處理流程 ..................................................... 46 圖 3-5 Doris D-InSAR 二軌跡法流程 ................................................... 47 圖 4-1 ERS-2 (a)像對基線資訊 (b)像對干涉條紋圖 ............... 50 圖 4-2. 調整後 ERS-2(a)像對基線資訊 (b)像對干涉條紋圖 .... 52. 圖 4-3 ASAR (a)像對基線資訊 (b)像對干涉條紋圖 ............... 53 圖 4-4. 調整後 ASAR (a)像對基線資訊 (b)像對干涉條紋圖 .. 54 IV.
(9) 圖 4-5 PALSAR (a)像對基線資訊 (b)像對干涉條紋圖 ........... 55 圖 4-6 ERS-2 LOS 年平均變動量 ......................................................... 57 圖 4-7 ASAR LOS 年平均變動量 ......................................................... 58 圖 4-8. PALSAR LOS 年平均變動量 ..................................................... 58. 圖 4-9. 臺北市水準測量主幹線水準網圖 .............................................. 59. 圖 4-10 ERS-2 水準資料與 PS-InSAR 成果 ........................................ 62 圖 4-11 ASAR 水準資料與 PS-InSAR 成果 ......................................... 64 圖 4-12 PALSAR 水準資料與 PS-InSAR 成果 .................................... 65. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. V. i n U. v.
(10) 表目錄 表 3-1 ERS-2 雷達影像資訊 ................................................................. 43 表 3-2 ASAR 雷達影像資訊 ................................................................. 43 表 3-3 PALSAR 衛星影像資訊 ............................................................. 44 表 4-1. 各衛星影像 PS 點位數量 ........................................................... 56. 表 4-2. 水準變動量與各類雷達影像涵蓋時間 ..................................... 60. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. VI. i n U. v.
(11) 第一章. 緒論. 第一節 研究背景與動機 合成孔徑雷達(Synthetic Aperture Radar, SAR)為一遙測工具,具有穿 透雲霧之能力與日夜皆可施測之特點,其延伸技術包含合成孔徑雷達干涉 技術(Interferometric Synthetic Aperture Radar, InSAR)與合成孔徑雷達差分 干涉技術(Differential Interferometric SAR, D-InSAR),能應用於斷層、火 山、地層下陷及地震等地表形變監測,其監測精度可達到公分級的變化情 勢(Gabriel & Goldstein, 1988; Massonnet & Feigl, 1998;謝嘉聲,2006) 。現. 政 治 大 進行監測及記錄,所得到的衛星雷達影像涵蓋面積大,可一次針對大面積 立 研究區域進行相關技術處理。此類相關技術輸出的產品擁有多層面的應用 今許多衛星載具皆有承載合成孔徑雷達儀器,以固定週期持續對地球表面. ‧ 國. 學. 價值,對於變遷偵測分析(Change detection analysis)、微小表面位移偵測 (Detection of small surface movement)或生成數值表面模型皆具備相當高. ‧. 的潛力 (Gens & Genderen, 1996; Stabel & Fischer, 2001; Ferretti et al., 2007:1;. sit. y. Nat. Xia, 2010)。. er. io. D-InSAR 雖可偵測出地形變化,但對地表的變遷偵測仍受制於雷達影. al. n. v i n Ch U 覆蓋的影響而降低技術成功機率(Ferretti 蕭逸凡,2010;Fan et e n g c h iet al.2007; 像的品質,無法有效且連續的獲得地區變化情勢,且容易受到大氣與植被. al., 2011; Ng et al., 2011) 。針對 D-InSAR 的限制,永久散射體雷達干涉技術. (Persistent Scatterer, PS-InSAR)因應而生,其可藉由永久散射體概念,以 多幅雷達影像挑選出同調性高的像元,接續利用多幅干涉圖的相同像元計 算區域內變化情形,計算橫跨多張 SAR 影像獲取期間的變化量,監測大範 圍地區。 然雷達波長從約為 1 公厘至 100 公分不等,不同的波長對不同類型的 植被區各擁有其不同的散射特性,且現今衛載雷達系統所選用的雷達波長 也不盡相同,在不同研究目的以及實驗地區中,必須考量選用的雷達影像 類型,才能獲得預期成果,以達到偵測地形變化的目標。 1.
(12) 由於臺灣本島百分之七十為山區,擁有眾多的植被覆蓋,本研究為探 討不同類型 SAR 影像執行 PS-InSAR 技術對於北臺灣的特性,欲以不同類 型 SAR 影像執行 PS-InSAR 技術,探討理論與實作的差異,並比較各類型 雷達影像的 PS-InSAR 成果。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 2. i n U. v.
(13) 第二節 研究目的 本研究以臺灣北部為主要實驗地區,選定三種不同雷達波長之 SAR 影 像,利用 SAR 影像於實驗區內執行 PS-InSAR 技術,獲取地形變化速率。 比對經濟部水利署的精密水準資料與 PS-InSAR 成果,評估 PS-InSAR 技術 於此實驗地區偵測地表變化的可行性與適宜性。 綜合以上所述,本研究目的分為下列三點: 一、依據多元 SAR 影像特性與 PS-InSAR 技術原理,歸納影像選取之 條件,並依其準則選取偵測實驗區地表變化合適的 SAR 影像以. 政 治 大 PS-InSAR 技 二、利用選定之各類型雷達影像數張,於實驗區內執行 立 及像對組合。. ‧ 國. 學. 術,獲取永久散射點及其變化速率。. 三、以經濟部水利署地層下陷資料庫所公布之精密水準測量資料,檢. ‧. 核 PS-InSAR 成果精度,評估此項技術應用於本研究實驗區的可. n. al. er. io. sit. y. Nat. 靠性。. Ch. engchi. 3. i n U. v.
(14) 第三節 研究方法及流程 依據本研究四項目的,本研究選用三類型雷達影像,以 PS-InSAR 技 術獲取地形變動量。在檢核與成果分析中,加入經濟部水利署所發佈之水 準歷年變動量,以供成果可靠性的判定。圖 1-1 為本研究流程圖。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. 圖 1-1. engchi. 研究流程圖. 4. i n U. v.
(15) 第四節 章節架構 本論文各章節編排內容如下: 第一章緒論包含研究背景與動機、研究目的與研究方法與流程,分別 講述本研究重要性、實際內容與目的。 第二章文獻回顧針對研究中主要技術:SAR、InSAR、D-InSAR 與 PSInSAR 技術作說明,歸納前述技術對本研究目標的條件以及限制。 第三章 PS-InSAR 執行策略描述 PS-InSAR 的影像選擇條件,並介紹本 研究所選用的影像資訊,而後介紹本研究使用工具以及處理流程。. 政 治 大. 第四章分三部分,首先展示 PS-InSAR 技術前端的 D-InSAR 成果,評. 立. 估選用雷達影像獲得干涉成效,以及像對篩選成果;其次依據經濟部水利. ‧ 國. 學. 署與工業技術研究院建置之地層下陷資料庫,以歷年水準測量資料檢核本 研究實驗成果精度。. ‧. 第五章結論與建議承接第四章研究結果,綜合探討本研究成果與研究. n. al. er. io. sit. y. Nat. 目的,並給予未來研究建議。. Ch. engchi. 5. i n U. v.
(16) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v.
(17) 第二章. 理論基礎與文獻回顧. SAR 具有日夜皆可施測,且可穿透雲霧之能力,當多被雲霧壟罩的地 區發生災害,而無法等候適合的大氣環境攝取光學影像時,SAR 就成為了 一項重要的工具。近年來合成孔徑雷達應用於災害防制的優勢逐漸受到重 視,國內對 SAR 影像用於臺灣地區各項地表形變分析,多擁有不錯的成果 (張中白等,2004;王志添等,2005;謝嘉聲,2006;陳錕山,2006; Hu et al., 2011)。 本研究欲使用之永久散射點雷達干涉技術,其主要建構在 InSAR 與 D-. 治 政 InSAR 以及 PS-InSAR 技術之理論基礎、技術成果以及國內外各項應用與 大 立 研究,最後一小節總結本章節所描述之各項技術之間的差異及其承接性。 第一節 合成孔徑雷達. 學. ‧ 國. InSAR 技術的基礎上,故本章分四節描述 SAR 影像波長理論、InSAR、D-. ‧. 雷達遙測系統為一種微波遙測系統,使用波長遠大於可見光與紅外線. y. Nat. 的微波,其波長從約 1 公厘至 100 公分不等,而不同的波長對地表特徵各. io. sit. 擁有其不同的散射特性,現今衛載雷達系統多使用 2 公分至 30 公分波長. n. al. er. (X、C、S 與 L 波段) 。由於雷達波長遠長於可見光與紅外線,使雷達能夠. i n U. v. 穿透大氣層,不受天候的影響,其特殊的主動式微波系統,提供了大尺度結. Ch. engchi. 構、地表粗糙度、地表物徵與物徵性質等多樣資訊(圖 2-1)。. 7.
(18) 立. 政 治 大. io. sit. 電磁光譜(Campbell, 2002:2). y. ‧. ‧ 國. 學. Nat. 圖 2-1. n. al. er. 雷達波長越長,其對於樹冠的穿透力越佳,而波長越短,其影像對地表. i n U. v. 的解析度越佳。圖 2-2 說明不同波長雷達波對植被的穿透能力,X 波段(約. Ch. engchi. 3 公分)的雷達波在樹冠頂層即會因樹葉、樹枝等遮擋形成散射,C 波段 (約 5.8 公分)的雷達波能部份穿越樹冠頂層,但仍會受到中間枝葉遮蔽, 無法達到地表,而 L 波段(約 23.5 公分)雷達波對樹冠與枝葉則擁有最佳 的穿透力,部份雷達波能到達地表,反映地表資訊,藉此分辨出不同大小與 結構之植物。波長越短,能得到面散射(Surface scattering)資訊越多,而 波長越長,則能擁有較佳的穿透力,並得到越多物質的體散射(Volume scattering)資訊(Jensen, 2007: 293-320)。. 8.
(19) 圖 2-2. 政 治 大 雷達波的植被穿透力(Jensen, 2007:320) 立. ‧ 國. 學. 歐洲太空總署 (European Space Agency, ESA)於 1991 年 7 月發射 ERS-1 衛星,於 1995 年又發射 ERS-2 衛星,此兩衛星皆是以太陽同步軌道. ‧. 方式運行,軌道高度約為 785 公里,軌道傾斜角約為 98.5°,軌道周期目前. y. Nat. 是以 35 天為一週期運作,使用雷達波長皆為 C 波段(5.6 公分) ,此兩衛星. io. sit. 皆已完成監測任務。其中 ERS-2 所酬載之合成孔徑雷達影像系統,是以 23°. n. al. er. 入射角斜視地面物攝取雷達回波資料,掃瞄軌跡寬約為 100 公里,其一幅. i n U. v. 影像大小約為 100 公里×100 公里,解析度約為 30 公尺,雖已於 2011 年 9. Ch. engchi. 月完成監測任務,但自 2001 年起,因衛星上儀器故障,無法有效記錄衛星 位置。 緊接著 ESA 又於 2003 年 3 月發射 ENVISAT 衛星,用以取代即將退役 的 ERS 衛星,其為一太陽同步衛星,飛行高度約 800 公里,重複觀測週期 為 35 天。衛星承載多個感測器,其中包括一合成孔徑雷達感測器,名為 ASAR(Advanced SAR),波長 5.3 公分,是一多極化雷達系統,然而在經 過十年的地球監測任務之後,於 2012 年五月正式宣告任務終結。 日本地球觀測衛星計畫於 2006 年 1 月發射 ALOS 衛星,負責針對陸域 進行觀測,其主要工作包括國土監測、精密製圖及自然資源調查等。ALOS 9.
(20) 承載的合成孔徑雷達系統名為 PALSAR(Phased Array type L-band Synthetic Aperture Radar) ,為使用 L 波段(23.6 公分)之主動式雷達影像系統,其影 像可提供製作土地覆蓋分類圖,用以進行環境監測與災害監測等工作,如 作物地區與森林監測。 臺灣地區氣溫高且濕熱,且同一地區可能包含多種不同的植被區,使 用何種類型波長之雷達影像能適應臺灣中緯度地區的大氣環境,並且於植 被區獲取地形變化量,是為本研究主要目的之一。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 10. i n U. v.
(21) 第二節 合成孔徑雷達干涉 合成孔徑雷達干涉技術最早應用在觀測金星(Venus)及月球的表面 (Rogers & Ingalls, 1969) ,是以雷達複數資料(Complex data)與相位(Phase) 值萃取地表的三維資訊,可用作決定高精度的地形資料。其後 Graham 於 1974 年以空載雙天線 SAR 系統同時獲得雷達訊號,達到干涉效果計算地 面的高程值。1989 年 Goldstein 等應用重複軌道處理 Seasat 衛星 SAR 影像, 以時間間隔三天的資料獲得地形圖等高線,並與 USGS(United States Geological Survey)地形圖資料擁有一定程度的吻合。. 治 政 大 是由美國 NASA 噴射推進實驗室與德國太空中心、義大利太空中心共同合 立 作,以雙雷達天線架置於同一載台上,產製涵蓋全球 80%、覆蓋範圍介於. 2000 年太空梭雷達製圖任務(Shuttle Radar Topography Mission, SRTM) ,. ‧ 國. 學. 北緯 60 度到南緯 57 度環帶狀區域的數值地形模型。圖 2-3 說明 SRTM 太 空梭結構,包括雙雷達天線以及定位系統。. ‧. n. er. io. sit. y. Nat. al. Ch. 圖 2-3. engchi. i n U. v. 太空梭雷達製圖任務. 自雷達干涉技術被證實擁有強大的實用潛力後,已成功的應用在許多 領域,包括地形圖製圖、產製數值地形模型、植物樹高研究與海岸線變化等 (蕭逸凡,2010)。 合成孔徑雷達干涉技術可以快速且大範圍的偵測區域的地形起伏,加 11.
(22) 上穿透雲霧與主動式光源的優勢,有助於獲得熱帶、極區或常年雲霧盤據 地區的地形資訊。本節包含 InSAR 取像模式、InSAR 原理以及 InSAR 成功 的條件等,其內容分項敘述如下。 一、InSAR 取像模式 合成孔徑雷達干涉技術是以兩張雷達影像中的複數資料與相位值 計算地表的三維資訊,依據雷達影像接收的時間以及天線間不同的幾 何位置關係,主要可分為三種資料獲取方式,分別是橫軌式(Acrosstrack)、沿軌式(Along-track)以及重複軌道式(Repeat-track / Multipass) (Gens & Genderen, 1996) ,以下分別敘述此三種取像模式原理,. 政 治 大. 並綜合敘述模式之間基本條件與差異。. 立. (一) 橫軌式(Across-track). ‧ 國. 學. 橫軌式取像模式須同時裝載兩個雷達天線於一載台上,. 且兩天線連線與飛行方向垂直,同時蒐集飛行方向一側資. ‧. 料(圖 2-4) ,其中 H 為航高,O1、O2 為取像位置 1、取像. Nat. sit. y. 位置 2,r1、r2 是位置 1 取像斜距、位置 2 取像斜距,B 為. er. al. n. θ。. io. 取像位置 1 與取像位置 2 基線, 90°減去雷達天線視角為. Ch. engchi. 12. i n U. v.
(23) 政 治 大 圖 2-4 橫軌式幾何示意圖. 立. ‧ 國. 學. 此種取像方式只需全相位回復(Phase unwrap)完成後,. 即可獲得高程資訊,缺點是無法有效分辨地形斜坡與飛機. ‧. 傾斜所造成的誤差,因此,擁有固定軌道及週期的衛星載. sit. y. Nat. 具較空載穩定,實際運作的有 SRTM 系統等。圖 2-5 以 ERS. io. er. 波長 5.6 公分為例,說明全相位回復利用不連續的相位資 訊計算出相位整數值。. n. al. Ch. 圖 2-5. engchi. i n U. v. 全相位回復示意圖(周峰泯,2009). 13.
(24) (二) 沿軌式(Along-track) 沿軌式的需求裝置類似於橫軌式,需要載台上搭載兩 部雷達天線,而差異點為雷達天線的掃描方向與載具的飛 行方向相同,圖 2-6 為其幾何示意圖。. 政 治 大. 立. ‧. ‧ 國. 學. 圖 2-6. 沿軌式幾何示意圖. y. Nat. io. sit. 因雷達天線的掃描方向與橫軌式不同,所以蒐集到的. n. al. er. 訊號所產生的相位差,主要來源為目標瞬間相對於感測器. i n U. v. 的變動量,如水流變動,因此沿軌式掃描方式無法分辨靜. Ch. 止不動的物體。. engchi. (三) 重複軌道式(Repeat-track / Multi-pass) 重複軌道模式載台只需配置一個雷達天線,利用載台 通過相同區域兩次的方式,得到接近相同的天線位置(圖 2-7)。. 14.
(25) 圖 2-7. 重複軌道式幾何示意圖. 政 治 大 此種取像模式需要依靠精密的軌道位置參數,以相近 立 的天線位置蒐集雷達資料,較適用於飛行穩定的衛星雷達. ‧ 國. 學. 載具。歐洲太空總署有特別針對 InSAR 設計了串聯任務. (Tandem Mission),以 ERS-1、ERS-2 兩顆衛星對同一區. ‧. 域蒐集僅相差一天的資料,其中有許多影像能夠得到良好. sit. y. Nat. 的干涉結果。此外,因為此模式只須單載台單天線,對於所. io. er. 有的雷達系統都能以此模式獲取所需雷達資料。. al. n. v i n C h InSAR 技術只需單一天線載台,即可依幾 部雷達天線,唯重複軌道式 engchi U 綜上所述,橫軌式與沿軌式資料獲取模式需要於同一載台裝置兩. 何條件的合適程度選取所需影像,實現 InSAR 技術。而就偵測內容區 分,唯沿軌式取像模式所形成的干涉條紋為物體瞬間變動量,橫軌式 與重複軌道式干涉條紋皆是代表物體高程資訊。 現今衛載雷達系統多以一載台搭配一雷達天線,如 ERS、ASAR、 PALSAR 等,以重複軌道式作為執行 InSAR 技術的資料獲取模式。本 研究以多數衛載 SAR 系統 InSAR 取像模式為主,選擇以重複軌道模 式執行 InSAR 技術。. 15.
(26) 二、InSAR 原理 InSAR 技術是以不同時間或不同位置所獲取的雷達資料,利用相 位值的差異解算地表的三維資訊,其概略幾何關係如圖 2-8。其中 H 為航高,O1、O2 為取像位置 1、取像位置 2,r 是位置 1 取像斜距, 為位置 1 至目標距離與位置 2 與目標距離差距,B 為取像位置 1 與取 像位置 2 基線, 為雷達天線視角。. 政 治 大. 立. ‧. ‧ 國. 學. 圖 2-8. 雷達干涉幾何示意圖. y. Nat. io. sit. 兩位置對同一地面點所接收到的相位差值為 ,而相位差代表意義. n. al. er. 為距離差值( )的波長數乘以 2 π ,其波長的差即為相位差,故以距. Ch. i n U. v. 離差值除以雷達波長( )再乘以 2 π ,即得相位差值(式 2-1)。. . 2 .. engchi. (2-1). . 因雷達訊號所傳遞的距離是由雷達天線出發,經目標點反射回雷 達接收天線,故位置 1 與位置 2 訊號傳遞總距離差距為 2 ,依式 21 可得到兩幅雷達影像對同一目標物所得到的相位差值應為:. . 2 4 . 2 .. . (2-2). . 16.
(27) 以式 2-4 推求其距離差為:. . . 4. (2-3). 由圖 2-8 可得知∠O2O1Z 為 90°- +α,依三角餘弦定理可得式 24:. r . 2. r 2 B 2 2.. r B.cos 90 . r 2 B2 2.. r B.sin( ). (2-4). 依據式 2-4 可以求得:. sin( ) . . 2. 2. 2. 2.. r B. r 2 2.. r 2 r 2 B2 2.. r B. 學 ‧. ‧ 國. 立. 政 治 大 (r ) r B. n. 移項後可得:. B. . Ch. sin . B. . y. sit. io. al. . 2 B2. er. Nat. 2.. r 2 B2 2.. r B. 2.. r B. engchi. i n U. v. 2 B2. (2-5). (2-6). 2.. r B. 根據前式 2-8 可推導取像位置 1 至目標點距離 r: r. 2 B2 2.[ B.sin ]. (2-7). 在圖 2-7 中可知:. Z y H r.cos. (2-8). 17.
(28) 最後將 2-5 式、2-7 式代入 2-8 式,即可得到目標點位高程值: . 2 B 4 Z y H .cos . 2.[ B.sin ] 4 2. (2-9). 依式 2-9 結果可得知,在雷達干涉技術的處理中,只需獲得軌道相 關參數,包括航高、視角、基線長等資訊,加上雷達觀測資料,即可 計算點位的高程值。 三、形成干涉條紋之限制條件與因素. 政 治 大. InSAR 技術主要為生成干涉條紋,用以解算連續地表資訊,如要. 立. 獲得理想的干涉條紋,則必須符合以下五項條件(Massonnet & Feigl,. ‧ 國. 學. 1998):. (一) 必須為複數影像(Complex Image). ‧. SAR 影像格式與處理後的層級眾多,唯有同時包括振. Nat. sit. y. 幅(Amplitude)及相位(Phase)資訊的複數影像才可以作. al. er. io. 干涉之用,其中振幅資料用以影像對位,類似真實地表;而. v. n. 相位資訊則是記錄雷達波波形的完整度,用作解算干涉條 紋。. Ch. engchi. i n U. (二) 兩次取像時間內,地表散射情形沒有改變 若在兩幅影像的獲取時間間隔內,地表變化情勢過大, ,此類現象多發生在植被覆蓋區與 為不相關(Decorrelation) 海岸線潮汐變化大等地區。為了解影像間的相關性,可以 同調性影像(Correlation image)輔助了解像對產製干涉條 紋的可能。. 18.
(29) (三) 相位值變化符合要求 干涉條紋的生成,是藉由鄰近像元間的變化性,當鄰 近像元間的相位變化值超過 2 π 時,像元間即會產生不相關 的現象。依前述 InSAR 原理可得知雷達相位差值與雷達波 長之關係。如同一位置像元在兩幅 SAR 影像中,雷達視距 方向上變化量超過 λ /2 時,該像元就會呈現不相關,以 ERS 衛星 SAR 影像為例,該衛星雷達波長為 5.6 公分,當同一 位置像元變化量超過 2.8 公分,即被判別為不相關。 (四) 不確定值(Ambiguity). 政 治 大. 雷達影像所記錄的相位資訊是相位的分數值,而整數. 立. 部份即為不確定值,必須利用相位回復技術計算該整數值,. ‧ 國. 學. 以得到正確的距離量,雖目前已有許多自動的相位回復方 式,但無法確保所得到的結果皆為正確。. ‧. 雷達為一側視系統,以記錄由地表反射後所接受的訊. sit. Nat. y. (五) 其他限制. n. al. er. io. 號與時間,其地表對於接收的訊號強度擁有相當的影響力,. i n U. v. 會因地表的起伏與粗糙度而喪失部分回訊,導致同調性的. Ch. engchi. 降低或資料空缺的情形。. 19.
(30) 第三節 合成孔徑雷達差分干涉 合成孔徑雷達差分干涉最早是由 Gabriel 等學者於 1989 年以三幅 Seasat 雷達影像生成兩幅干涉條紋圖,接著依此兩幅干涉條紋圖利用差分干涉技 術推求地表變形量,率先證實以合成孔徑雷達差分干涉法可以獲得公分級 的變形情形。其後,有許多研究陸續針對 InSAR 技術作更進一步的發展與 探討,延伸出 D-InSAR 不同的組成方式。本節主要介紹 D-InSAR 原理與公 式推導,以及 D-InSAR 組成方式所對應的國外歷年應用,接續為 D-InSAR 主要誤差來源,最後為台灣地區 D-InSAR 應用,以下就前述各項分別敘述 之。 一、D-InSAR 原理. 立. 政 治 大. 合成孔徑雷達差分干涉技術係利用不同時期所產生的干涉條紋圖,. ‧ 國. 學. 去除干涉條紋所包含的相同地理訊息與其他雜訊後,可以得到因地表 變形所產生的相位差距,且同樣以干涉條紋呈現,此項技術經證實可. ‧. 獲得公分等級精度。. y. Nat. sit. 由於雷達偵測是沿著天線至目標物的雷達視距方向,因此 D-. er. io. InSAR 所得到的地表變動量同樣為雷達視距方向。圖 2-9 說明 D-. al. v i n Ch 無變動情形發生時的地形高程資訊,作為地形對(Topo-pair) ,再以 engchi U n. InSAR 組成的幾何關係,其中以 O1O2 形成第一張干涉條紋圖,代表. O1O3 形成第二張干涉條紋圖,包含地形資訊以及地表變動的訊息,作 為變形對(Defo-pair) ,B 為 O1O2 基線,可依 O2 雷達視距方向分為垂 直基線 B 與水平基線 B/ / 。. 20.
(31) 治 幾何示意圖 政 D-InSAR 大. 圖 2-9. 立. 從 InSAR 原理可得知,因雷達獲取地表資訊方式為訊號由天線至. 為雷達波長, 為 r2 r1 :. Nat. . . io. n. er. 依據餘弦定理可得知三角形 O1O2P 中:. al. (2-10). y. 4. ‧. . sit. ‧ 國. 學. 目標再返回天線,所以相位差值( )與路徑距離差的關係為,其中. i n U. v. r22 r12 B2 2 r1 B cos(90 ). Ch. engchi. r12 B2 2 r1 B sin( ). (2-11). 經過移項整理後可得式 2-12:. r2 r1 . 2 r1 B B2 sin( ) (r2 r1 ) (r2 r1 ). (2-12). 因 r1 r2, 為 r1 與 r2 的距離差,且 B 遠大於 r1 與 r2,可將上式約 化為:. B sin( ) B//. (2-13). 21.
(32) 上述式中 B/ / 為基線的水平分量,故地形對的相位差值可表示為:. . 4. B/ /. . (2-14). 變形對的相位差值( ' )除了包含地形資訊外,亦包含地表變動 量所造成的距離差( r ) ,令 B ' 為 r3 r1 , B// ' 為 B ' 的平行分量,依前 述像對關係式,可將變形對關係表示如下:. '. 4. [r1 (r3 r )] . . 4. . ( B/ / ' r ). (2-15). ,將其代入式 2-15 可得: 政 4治 B 大. 依據地形對關係式 2-14 得知 . ‧ 國. ( B// ' r ) . B//. B// ' 4 r B// . 學. '. 立. . //. (2-16). ‧. 初步產生干涉圖時,因各個地面點與感測器間的距離不同,相位 差值會包含距離差值,因此在干涉處理的過程中,必須將此類差距予. y. Nat. sit. 以消除,才能正確的推算地面點位相應的高程值,此項程序稱為平坦. n. al. er. io. 化處理。其公式如式 2-17,式中 f 為經過平坦化處理的相位差值, 0 為第一個像元點的雷達視角:. f . 4. . Ch. engchi. i n U. B [sin( ) sin(0 )]. v. (2-17). 變形對的相位值經平坦化處理後,為簡化方程式,令 0 、. 0 ,其關係式可表示為:. f ' . 4. . [ B sin( ) B sin ]. 將上式展開後,因 很小,故可約化為:. 22. (2-18).
(33) f ' . 4. . 4. . [ B (sin cos ) B sin ]. B cos . (2-19). 地形對在第一個像元方向上的垂直分量( B )可表示為 B cos , 0. 代入式 2-19,可得:. f . 4. . B0. (2-20). 同理可得變形對經平坦化後的相位差值,其中 B ' 為變形對在第 0. 政 治 大. 一個像元方向的垂直分量:. 立4 B. 0. . '. 4. . r. (2-21). 學. ‧ 國. f ' . 將式 2-20 移項後代入式 2-21,可得:. . r. (2-22). y. 4. sit. B0. f . ‧. B0 '. Nat. f ' . n. al. er. io. 依據式 2-22 可得知,以地形對與變形對的垂直基線值與兩者的相. i n U. v. 位差值,即可依此計算在雷達視距方向上的變形量。. Ch. 二、D-InSAR 組成方法. engchi. D-InSAR 建構在兩張不同時期的干涉條紋圖上,其中一張代表地 表高程,另一張除了包含地形影響量之外,還包括地表形變量,兩張 干 涉 條 紋 圖 依 相 對 關 係 可 分 為 二 軌 跡 法 ( Two-pass differential interferogram)、三軌跡法(Three-pass differential interferogram)與四 軌跡法(Four-pass differential interferogram)三種(謝嘉聲,2006), 分別敘述如下:. 23.
(34) (一) 二軌跡法 以兩張橫跨地表位移時間的雷達影像作為變形對,產 製一張干涉條紋圖,包含地形資訊以及地表形變資訊,再 利用地表位移前既有的數值地形模型模擬成干涉條紋,依 此計算地表變動情形。 Massonnet 等學者(1993)以兩幅 ERS-1 衛星所獲得之 雷達影像產製干涉條紋圖,並利用現有數值地形模型去除 地形效應,得到代表地震變動的干涉條紋圖,用以偵測 1992 年美國加州 Lander 地區 7.3 級地震,結果有效的偵測出地. 政 治 大. 震所引起的地表變形量。 (二) 三軌跡法. 立. ‧ 國. 學. Zebker 等學者(1994)對 Lander 地區地震變形以三幅. ERS-1 衛星雷達影像產製干涉條紋圖,續以差分干涉技術. ‧. 偵測出 Lander 地震變形量,並以全球衛星定位系統(Global. Nat. sit. y. Positioning System, GPS)以及全站儀的地面量測技術加以. al. er. io. 檢核,比較結果同樣得到公分級的精度,證實了此項技術. n. 實際應用的可靠性。. Ch. engchi. i n U. v. 此法是利用一主影像(Master image)與兩張副影像 (Slave image) ,以地表發生形變前的主影像與一副影像形 成地形對(Topo-pair)反應地形資訊,再以主影像搭配地表 形變後的另一張副影像組成變形對(Defo-pair) ,反映地表 形變資訊與地形資訊,最後依據差分干涉原理去除地形高 程,進而得到地表形變資訊。 (三) 四軌跡法 此種模式使用四張 SAR 影像,由第一張主影像與第一 張副影像組成地形對,該像對拍攝期間地表沒有形變產生, 24.
(35) 再以橫跨地表變動時期的第二張主影像與第二張副影像形 成變形對,生成第二張干涉條紋圖,依此進行 D-InSAR 處 理,得到地表形變所產生的相位差值。 1998 年 Massonnet 等學者使用四幅 ERS-1 的衛星雷達 影像組成六幅像對組合,以 D-InSAR 技術偵測加州 East Mesa 地熱區的地層下陷情形,並與水準測量成果進行比較, 得到相同的下陷結果。2011 年 Bayuaji 等學者利用 2006 年 至 2008 年的 ALOS PALSAR 影像形成七組像對,成功的偵 測出印度的一座泥火山變化情勢,成果同樣與 GPS 變化量. 政 治 大 上述三種影像處理方式,必須將 SAR 影像間所組成的像對做精密 立 相符,證實 D-InSAR 技術的可靠性。. ‧ 國. 學. 套合,尤其是處理三張以上 SAR 影像的三軌法與四軌法,各形成的干 涉條紋必須準確的對應到代表相同地表的像元,使後續的差分干涉處. ‧. 理能得到正確的產出資訊。. sit. y. Nat. 三、D-InSAR 主要誤差來源. er. io. D-InSAR 技術已日趨成熟且被廣泛地運用在各類型地表變動監測,. al. 然此技術容易因許多因素導致干涉效果降低,包括地表物特徵、大氣. n. v i n Ch 效應、基線長誤差、數值地形模型誤差與時間性誤差 (Hooper, 2006) , engchi U 以下分別簡述其意義。 (一) 地表物特徵 在 SAR 影像中,雷達的回波強度與影像同調性有著正 相關性,當地表物特徵對於雷達波容易形成散射時,會降 低回波強度,導致同調性降低,影響干涉成像。 (二) 大氣效應 衛載雷達系統訊號在大氣中的傳遞會受到大氣中粒子 一定程度的散射影響,如電離層與對流層皆會對雷達波產 25.
(36) 生訊號延遲,使得相位值的解算出現誤差。 (三) 基線長誤差 衛星雷達干涉法多是利用重複軌道的方式組成干涉像 對,雷達系統兩次對同一地物接收反射回訊時衛星位置間 的距離即為基線,而基線越長 SAR 影像於山區的幾何變形 也會越嚴重,使得 SAR 影像間的對位時產生對位誤差。此 外基線於垂直方向也會提供相位變化,此種相位值是需要 被估算並消除的部分。 (四) 數值地形模型誤差. 政 治 大 二軌跡法的 D-InSAR 需要加入現有 DEM 以去除地形 立. 所產生的相位,但實際上的 DEM 因為資料格式而與真實地. ‧ 國. 學. 形高程有些許差異,產生因 DEM 網格解析度不為連續地表 高程所造成的誤差,故在扣除地形效應相位時,即會產生. ‧. DEM 誤差(圖 2-10) 。另外,DEM 產製的時間與 SAR 影. Nat. n. al. er. io. sit. y. 像獲取時間的地形差距,也會形成此類誤差。. Ch. 圖 2-10. engchi. i n U. v. 數值地形模型與真實地表誤差. (五) 時間性誤差 若獲取形成干涉條紋圖的兩張 SAR 影像的時間間隔過 長,地表特徵容易因時間而改變,如植被的生長、建築物拆 遷等,降低像對同調性而無法形成有效干涉。. 26.
(37) 四、臺灣地區各項 D-InSAR 研究 臺灣地區近年來廣受地震及地層下陷之威脅,1999 年 9 月 21 日 發生在南投的集集地震,是臺灣近幾年來規模最大的地震,Suga 等 (2001)首先以同調性影像以及 D-InSAR 成果,偵測西部平坦地區的 災害變形狀況,而後各研究團隊陸續發表以不同的 D-InSAR 處理方式 偵測集集地震的變形結果(張中白等,2004;王志添等,2005;陳錕 山,2006;謝嘉聲,2006)。 屏東平原、雲林與台南等地區由於地質構造特殊與人為因素,近 年來飽受地層下陷困擾,2004 年以來,相繼許多研究依據 GPS 以及. 政 治 大 Hu, 2006;謝嘉聲,2006;盧玉芳,2007;王志添,2010) 。 立. 水準測量資料比對 D-InSAR 成果,皆有不錯的收獲(張中白,2004;. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 27. i n U. v.
(38) 第四節 永久散射點雷達差分干涉 繼 InSAR 技術日趨成熟,D-InSAR 技術因應而生,雖 D-InSAR 可得到 大範圍連續的地表變化量,且所需影像數量只需介於地表變化前後 2 至 4 張即可,但影像要求條件嚴苛,欲成功的得到干涉情況良好的像對必須符 合多種條件,使得以 D-InSAR 技術求得地表變動量須跨過一定限度門檻。 在選擇衛載雷達影像時,往往必須因為其條件,限縮可研究範圍。 為解決沒有清晰訊號的問題,最早的辦法是在地表建立人工角反射器 (圖 2-11),其原理如圖 2-11(b)所示,當雷達訊號到達角反射器,訊號 會依原方向返回接收器,此法解決了單點監測的問題,但由於人工角反射. 政 治 大. 器必須由人工設置並維護,花費大量人事成本,成為此法不易成功推廣之. 立. 一大主因。而後學者發現自然界中存在此類型角反射器,可視為人工角反. ‧ 國. 學. 射器對待,2001 年 Ferretti 等人提出藉由此類自然角反射體,依研究區內部 分散射特性較為穩定的目標,發現相隔數年的干涉像對,對此類目標仍有. ‧. 較高的同調性,接著從一時間序列上的 SAR 影像中萃取此類散射特性的亮 點,並作全相位回復(Unwrapping) ,成功於未有完整連續相位資訊的地區. y. Nat. n. er. io. al. sit. 獲取地表高程變化的實例。. Ch. (a) 圖 2-11. engchi. i n U. v. (b) 人工角反射器示意圖. 28.
(39) 圖 2-12 中表示像元中擁有永久散射體對雷達訊號的效果,當一個像元 中沒有任何的永久散射體,則 100 次的接收訊號會於 與 之間呈現無規 律性分布,如圖 2-12(a);一旦像元所包含的地表中擁有永久散射體,如 圖 2-12(b),接收的雷達訊號會擁有較為穩定的一致性,在像對間則會擁 有較佳的同調性。. 立. ‧. ‧ 國. 學 y. 永久散射體效果示意圖 (Hooper et al., 2007). sit. Nat. 圖 2-12. 政 治 大. er. io. PS-InSAR 技術是利用 SAR 影像所包含的資訊檢測各像元,挑選出相. al. v i n C hSAR 影像中的穩定相位資訊後,可利用其原理 射特性,提取出長時間序列 engchi U n. 位變化穩定的永久散射體,因此類型點位在 SAR 影像具有穩定的雷達波散. 分離出一定範圍內的大氣效應誤差,同時利用多幅 SAR 影像像對與衛星基 線資訊,以 D-InSAR 技術去除地形效應,估算地形所產生的地形效應誤差。 此方式可將對 D-InSAR 結果影響最大的兩項因素去除。 自永久散射體概念被發表以後,許多永久散射體選擇方式相繼而生. (Ferretti et al., 2001; Crosetto et al., 2003; Lyons and Sandwell, 2003; Werner et al., 2003; Kampes, 2005) ,其主要是利用模型選取 PS 候選點(PS candidate, PSC),在城市地區皆能有效獲得 PSC 以及地形變動量。然 Ferretti 所提出 的永久散射體技術必須加入當地線性的平均地表速度場,以求得非線性的 地表變化量。此法擁有兩大限制,皆與篩選 PSC 時是以尚未進行全相位回 29.
(40) 復的相位觀測值作為評斷依據有關,其一,若一 PSC 與另外的 PSC 之間的 距離過大則兩 PSC 之間會受到大氣與其他誤差所影響,無法有效地回復 PSC 相位,降低其可靠性,通常會發生在植被覆蓋率較高的地區,因人為 建築距離過遠,使得找尋到的 PSC 間距過長;其二,建立相似模型必須先 自相位資訊中排除大氣誤差、軌道誤差、地形與其他相位誤差,此時必須先 求得實驗地區上述的誤差估值,藉以求得穩定且可靠的 PSC,此法在大氣 環境改變或其他相位誤差出現時,則容易失去 PSC,使得影像範圍內的 PSC 連結不穩固(Hooper et al., 2004) 。前述兩項限制使得 PS-InSAR 在植被覆 蓋率大的地區容易搜尋不到合適的永久散射候選點,導致解算地表變動量 失敗。. 政 治 大 2004 年 Hooper 等人研發一套 PS-InSAR 技術流程,取名為 StaMPS 立 (Stanford Method for Persistent Scatterers)採用影像振幅資訊與同調性結合. ‧ 國. 學. 的方式識別永久散射體候選點,此種作法不需要先驗知識,可在任何地形 區域提取永久散射點,消除前述 Ferretti 等所提出的方法的第一項限制。又. ‧. StaMPS 利用現有 DEM 以及長時間序列的雷達影像,估算每張雷達影像獲. sit. y. Nat. 像時間點的大氣及軌道誤差,降低因此誤差所無法辨識出 PSC 的可能。此. io. er. 法回應 Ferretti 等所提出的方法的第二項限制。2007 年 Hooper 等人於擁有 植被覆蓋的加拉帕哥斯火山群島(Volcan Alcedo, Galapagos)進行實驗,結. n. al. Ch. i n U. v. 合水準測量、GPS 測量以及電子測距結果,分析形變資訊,發現結果擁有 相當高的一致性。. engchi. StaMPS 軟體係利用振幅影像以及同調性影像初步篩選永久散射體候 選點,再於各像對所組成的干涉條紋圖內計算 PSC 點位的相位資訊,而後 建立候選點與周遭候選點之間的相位關聯,用以判別穩固永久散射體。以 下分 PS 點為選取、相位解算、數值地形模型殘差估算以及大氣效應估算逐 步敘述其原理。. 30.
(41) 一、PS 點位選取 永久散射體點位擁有穩定的散射特性,故先以雷達影像的振幅資 訊以及同調性影像分別挑選 PSC,接續取其交集,最後利用相位資訊, 篩選出時間序列上相位穩定的點位,作為合適 PS 候選點。 Ferretti 於 2001 年提出從振幅影像中挑選合適 PSC 方程式: DA . A A. (2-23). 其中: DA 為影像中像元振幅強度的分布指標. 政 治 大. A 為各像元在時間序列上的振幅強度標準差. 立. A 為各像元在所有 SAR 影像中的平均強度. ‧ 國. 學. 同時訂定 DA 門檻值作為初步篩選 PS 候選點依據,若像元的 DA 小. ‧. 於門檻值,代表此像元於時間序列中的強度較強且散射效果相對穩定, 便定義此為 PSC。Hooper 於 2004 年對於加拉帕哥斯火山群島之門檻. y. Nat. sit. 設定為 0.4,StaMPS 方法則可選擇 0.4~0.6。除利用振幅強度篩選 PSC. n. al. er. io. 之外,StaMPS 另外加上同樣以式 2-23 分析同調性影像,選取此兩種. i n U. v. 方式所得的 PSC 交集,作為第二階段 PSC,接續判定其像元在相位中 的穩定度。. Ch. engchi. 以像對的干涉條紋圖與現有 DEM 形成二軌跡法 D-InSAR 後,其 所得的干涉條紋圖相位資訊,除了包含代表地形變動的相位差之外, 還包括了大氣效應、軌道誤差以及數值地形模型造成的相位(Hooper et al., 2004) ,其方程式如式 2-24。. x,i def , x,i , x,i orb, x,i , x,i nx,i. (2-2 4). 其中: x ,i 為第 x 像元於第 i 組干涉條紋圖中的相位. 31.
(42) def , x ,i 為地表於 LSO 方向的變形所代表的相位 , x ,i 為大氣效應所代表的相位. orb, x ,i 為衛星精密軌道誤差所代表的相位. , x ,i 為數值地形模型誤差所代表的相位 nx ,i 為雜訊,包含熱雜訊(Thermal noise)以及對位誤差. (Coregistration error)等。 以 x 像元為中心,在一定範圍內的 PSC 一起加入解算分析,取所. 政 治 大 中一隨機分布,若範圍內擁有足夠 PSC,則此誤差在平均後會趨近於 立. 有 PSC 的相位資訊平均,可得式 2-25。其中原 DEM 誤差 , x ,i 為空間. ‧ 國. 學. 零,故可忽略不計。. x,i def , x,i , x,i orb, x ,i n x,i. (2-. ‧ y. Nat. er. io. sit. 將式 2-24 減去式 2-25 可得: '. x,i x,i , x,i nx,i n x,i. n. al. Ch. 25). engchi U. v ni. (226). '. 其 n x,i n x,i ( def , x,i def , x,i ) ( , x,i , x,i ) ( orb, x,i orb, x,i ) 。由於 PSC 之間的距離短,其地表變化、大氣效應以及軌道效應的變化量及 '. 小,在強度及同調性皆為穩定的情況下,雜訊的干擾相對微弱,故 n x ,i 值非常小且可忽略。而 DEM 的誤差與像對的空間垂直基線成一線性 關係,故可得式 2-27。. , x,i B, x,i K , x. (227). 32.
(43) 其中 K ,x 為一常數,將式 2-27 代回式 2-26 後可得式 2-28。. x,i x,i B, x,i K , x. (228). 而 x ,i 與 x ,i 可由干涉圖中取得,B, x ,i 則可自衛星精密軌道中求得, ~. 解算出常數 K ,x ,再由式 2-27 解算 DEM 誤差的相位量估值 , x ,i 。 Hooper 等學者於 2004 年提出估算像元穩定度公式(式 2-29) ,將 各干涉圖中 PSC 的相位量與解算出的 DEM 誤差相位量估值代入此 式,求得各 PSC 的像元穩定度。其中 x 為第 x 像元的相位於時間序列. N. . i 1. . 學. ‧ 國. 治 政 大 上的穩定度, N 為干涉圖的數量,而在時間序列中以隨機相位值出現 立 的像元,很難獲得高的像元穩定度。 . x (1/ N ) exp 1 x ,i x,i , x,i ~. . (229). Nat. y. ‧. . er. io. sit. 為篩選所有的 PSC 成為真正的 PS 點,必須訂定穩定度門檻值 *, 而此門檻值的訂定方式,是利用機率密度函數(Probability Density. n. al. Ch. i n U. v. Function, PDF) ,此函數是對於像元穩定度的一項加權總和方程式,對. engchi. 於相位隨機出現的像元,定義 PDF 為 p ( x ) ;對於相位穩定出現的像 元,定義 PDF 為 p ps ( x ) ,其相關方程式如式 2-30。 p( x ) (1 ) p ( x ) p ps ( x ). (230). 其中 為 0 至 1 的正數,若 x 值相當小(例:小於 0.3),則 p ps ( x ) 0,且假設 p( x ) 與 p ( x ) 關係如式 2-31,便可初步估計 ,. 計算得門檻值 * 。. 33.
(44) . 0.3. 0. p( x )d x (1 ) . 0.3. 0. p ( x )d x. (231). 依上式求解出 * 後,便可依此門檻值持續化算 PS 點所定義的 PDF, 直至選出的 PS 點為數量收斂,即接受最後所得 PS 點為可信的永久散 射體點位,進行後續的 PS 解算。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 34. i n U. v.
(45) 二、相位解算 選出穩定的 PS 點後,便進行 PS 點全相位回復,還原原始相 位資訊所代表的地形變動量。相較於 D-InSAR 技術,PS-InSAR 除 了平面坐標之外,還須加入時間參數解算全相位回復,然現階段 尚未發展出有效解算三維資訊的演算法,因此 Hooper 等學者將此 三維資訊模擬成二維資訊作解算。首先計算出 PS 點在各從影像上 的相位變化,應用最小均方根對同一個 PS 參考點於各 SAR 影像 內反覆解算相位,如此得到其他 PS 點於各 SAR 影像相對於 PS 參 考點的變化量,最後扣除各 PS 點在時間上的相位變化,即可獲得. 政 治 大 的形變,甚至可以完整的解讀出三維的相位資訊。 立. 各點於時間序列上的變化量,此法擁有足夠的能力解讀地表緩慢. ‧ 國. 學. 三、數值地形模型殘差估算. 在選出具有可信度的 PS 點後,即可依式 2-28 得到各點對於地形. ‧. ~. 效應的誤差估值 , x ,i ,將此相位值同樣進行前述的相位解算,便可獲. Nat. sit. y. 得 DEM 誤差,但此 DEM 誤差是以計算 K ,x 後所得的估算值,與真. n. al. er. io. ,其中 ' , x ,i 即為 DEM 實的 DEM 誤差( , x ,i )仍有些許差異(式 2-32) 殘差(Residual DEM error)。 ~. Ch. engchi. i n U. v. x,i , x,i def , x,i , x,i orb, x,i nx,i ' , x,i. (232). ~. 由式 2-27 解算 DEM 誤差的相位量估值 , x ,i 時,已相當接近 , x ,i, 故在一小區域、短時間內處理時可忽略不計,但此值可能會因為處理 的範圍擴大,或時間的延長而累積成較大的誤差值。 四、大氣效應估算 全相位回復後,式 2-32 中除了我們所需的地形變化量 def , x ,i 之外, 其他四項誤差依然存在相位資訊中,然此四項誤差與地形變化量最大 35.
(46) 的差異在於地形變化量主要是時間相關(Temporally correlated) ,故接 續將相位資訊在時間作高通濾波(High-pass filtering) ,在空間上做低 通濾波(Low-pass filtering) ,如此便可得到代表此四項誤差的相位值, 而剩餘與空間不相關的誤差則可歸類為雜訊(Ferretti et al., 2007) 。然 四項誤差中 orb, x ,i 可由精密軌道資料估算, ' , x ,i 與 nx ,i 已於前述相位分 析時將之逼近於很小可忽略,故此步驟所濾除的相位值,主要代表大 氣誤差量 , x ,i ,最後即可獲得代表地形變化量的相位值 def , x ,i 。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 36. i n U. v.
(47) 第五節 小結 D-InSAR 架構在 InSAR 技術上,而 PS-InSAR 則架構在 D-InSAR 技術 上,其最大的不同點分為兩項,其一,在於 D-InSAR 是藉由連續的相位資 訊獲得面狀地形變動量,而 PS-InSAR 則是雷達影像序列中點位資料的單 點變化量;其二 D-InSAR 技術是獲取地形對以及變形對時間內的變化量, 而 PS-InSAR 則是獲得各影像間的單點變化量,用以估算時間內各雷達影 像連續的變化量。 本章節回顧 SAR 影像、InSAR、D-InSAR 與 PS-InSAR 技術,欲以 PSInSAR 技術消除 D-InSAR 獲取地表變動量的限制,偵測實驗區內地表形變,. 政 治 大. 求得的永久散射點各點的變化量,用以計算長時間序列的單點地表連續變. 立. 化量。此種技術對影像的幾何條件較 D-InSAR 低,使未能形成良好干涉條. ‧ 國. 學. 紋的像對也可計算單點的變化量,唯因時間連續性的要求,所需影像數量 較 D-InSAR 多,用以準確的求得到穩固的永久散射點。. ‧. 本研究選擇 2004 年 Hooper 與其研究團隊所研發之 StaMPS PS-InSAR. sit. y. Nat. 處理方法,依據本章所描述的技術原理以及特性處理 SAR 影像,得到的產. io. al. n. 可能。. er. 出成果套疊精密水準資料,評估此技術於臺灣北部區域獲取地形變化量的. Ch. engchi. 37. i n U. v.
(48) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v.
(49) 第三章. 研究方法. PS-InSAR 技術主要架構在 InSAR 及 D-InSAR 技術上,而此兩技術對 於影像有其一定的限制,本章首先介紹 InSAR、D-InSAR 技術對於 SAR 影 像的條件,並依其準則與參考文獻選取涵蓋本研究實驗區的 SAR 影像,而 後介紹本研究所使用的 PS-InSAR 技術處理軟體 StaMPS,最後說明以 StaMPS 執行 PS-InSAR 流程中各步驟主要執行內容。. 第一節 資料選取 不同的雷達波長對地物擁有不同的回訊特性,長波長能穿透較多的覆. 政 治 大 小一半的地表變化情勢。然而在臺灣高溫且溼熱的環境中,島內的植被區 立 蓋植被,得到較佳的同調性;短波長則對地表變化較敏感,可偵測出波長大. ‧ 國. 學. 複雜,於不同植被區上執行 PS-InSAR 技術時,各類型 SAR 影像所呈現的 差異則為本研究主要探討目標。本研究選取影像獲取時間包含檢核資料日. ‧. 期的 ERS-2(波長 5.6 公分)、ENVISAT ASAR(波長 5.3 公分)與 ALOS PALSAR(波長 23.6 公分)三種不同類型衛星雷達影像,比較 InSAR 與 PS-. y. Nat. io. sit. InSAR 技術於本實驗區成果。. n. al. er. 如欲獲得良好 InSAR 與 D-InSAR 成果,則須考慮第二章文獻回顧中所. i n U. v. 提及的誤差來源與限制條件,包括像對間垂直基線的選擇以及時間的間隔. Ch. engchi. 等,以下分此兩項介紹,並依其描述作為影像選擇依據。 一、影像垂直基線選擇 在重複軌道干涉處理的過程中,基線長度是非常重要的參數,當 選取的像對基線值太長時,會因幾何關係的差異,導致像元間不相關; 基線長度太短時,很容易造成相位值無法回復,同時對大氣干擾及雜 訊非常敏感。因此,要執行干涉技術的影像像對需要事先經過基線長 度的篩選,才可能得到較好的成果。 依據 D-InSAR 原理,垂直基線的大小會影響干涉所得到的成果, 不同的基線值適合不同的應用處理,對於產製數值地形模型為主的像 39.
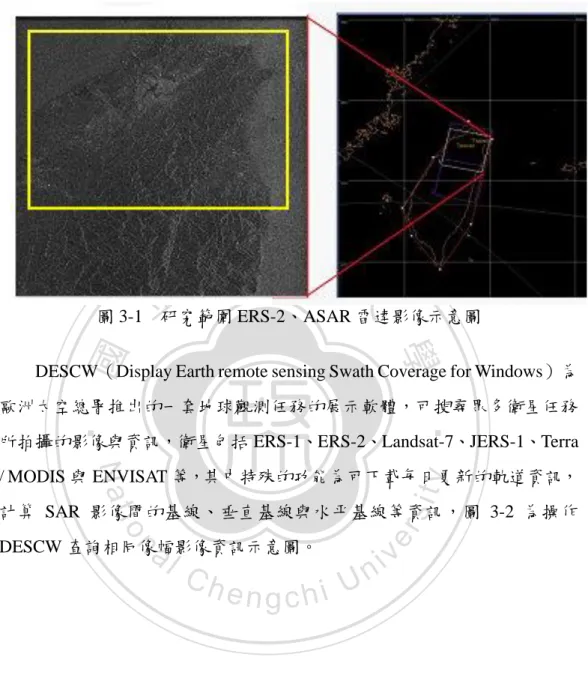
(50) 對,ERS-2 與 ASAR 兩類 C 波段衛星 SAR 影像需擁有較短的時間間 隔以及中高級(約 100 至 450 公尺)的垂直基線,而偵測地表位移的 像對,則需擁有橫跨地表形變的時間間隔以及 0 至 30 公尺的短垂直 基線(Ferretti et al., 2007;謝嘉聲,2006)。 Bayuaji 等學者(2011)使用垂直基線 108 公尺至 2166 公尺的 PALSAR 衛星雷達影像對,成功獲取干涉條紋圖,另外 2010 年 Yu 與 Ge 學者使用 757 公尺至 2992 公尺垂直基線的像對,同樣以 PALSAR 成功的獲取數值地形模型。 本研究依據前述文獻對於垂直基線的準則做為參考,選取垂直接. 政 治 大. 線不大於 3000 公尺的 PALSAR 影像像對作為實驗對象。 二、影像日期選擇. 立. ‧ 國. 學. 每一張干涉條紋圖皆是由兩張 SAR 影像所組成,想要獲得良好的 干涉效果,就必須藉由高同調性像元解算干涉效果,而此兩張 SAR 影. ‧. 像的時間間隔,則是影響此兩張 SAR 影像之間同調性的重要因素。在. Nat. sit. y. 重複軌道的衛星雷達系統中,通常時間間隔為一次重複拜訪週期的. er. io. SAR 影像像對會擁有較佳的同調性,代表週期內地表地物無明顯改變,. al. 而時間間隔越大,則地表地物改變的機率也越大,容易降低其同調性,. n. v i n Ch 因此選用合適的衛星雷達影像時間也是影響本研究成果的重要因素。 engchi U ERS-2 與 ENVISAT 兩衛星於臺灣北部所拍攝的雷達影像,因衛星同為 ESA 所設計,其像幅及軌道資訊所對應的地表相同,皆為 Track : 461 、 Frame : 3108 的 SAR 影像。而 ALOS PALSAR 設計不同於前兩衛星,因此 軌道與像幅資訊不同,以下分別就此三衛星說明本研究所選擇的 SAR 影像。 由於 InSAR 技術是以兩張 SAR 影像作干涉處理,首先必須經過 SAR 影像對位,求得兩張 SAR 影像的相對方位,而此動作是利用影像的振幅資 訊作為對位的基準,以罩窗計算兩張影像的同調性,故此動作在影像邊緣 會容易產生無法對位的情形。本研究為排除前述情形,選擇原影像中遠離 影像邊緣區域,圖 3-1 以 ERS-2 1995 年 12 月 9 日的單觀點複數影像(Single 40.
(51) Look Complex image, SLC image)為例,黃色方框為此兩類 SAR 影像於本 研究中實驗的影像範圍,主要包含各類型的地表利用與覆蓋。. 政 治 大. 圖 3-1. 立研究範圍 ERS-2、ASAR 雷達影像示意圖. ‧ 國. 學. DESCW(Display Earth remote sensing Swath Coverage for Windows)為. ‧. 歐洲太空總署推出的一套地球觀測任務的展示軟體,可搜尋眾多衛星任務 所拍攝的影像與資訊,衛星包括 ERS-1、ERS-2、Landsat-7、JERS-1、Terra. Nat. sit. y. / MODIS 與 ENVISAT 等,其中特殊的功能為可下載每日更新的軌道資訊,. al. n. DESCW 查詢相同像幅影像資訊示意圖。. Ch. engchi. 41. er. io. 計算 SAR 影像間的基線、垂直基線與水平基線等資訊,圖 3-2 為操作. i n U. v.
(52) 立. 圖 3-2. 政 治 大. DESCW 查詢影像資訊. ‧ 國. 學. 本研究使用 DESCW 作為影像查詢工具,可獲 SAR 影像獲取日期與幾 何基線等資訊,同時考量 SAR 影像像對間隔時間以及衛載雷達系統壽命與. ‧. 資料完整度,以涵蓋本實驗區的像幅(Track:461, Frame:3108)且已獲取的. sit. y. Nat. SAR 影像為主,選取 ERS-2 衛星雷達影像自 1995 年至 2003 年影像 12 張. io. er. 與 ASAR 自 2003 年至 2008 年影像 14 張,其影像資訊如表 3-1、表 3-2,. al. 其中 B⊥為從影像相對於主影像的垂直基線長,另外包含衛星、影像獲取日. n. v i n Ch 期、軌道以及從影像與主影像獲取時之時間間隔。不同於 ERS-2 與 ASAR, engchi U 臺灣北部所對應的 PALSAR 衛星軌道及像幅資訊為 Track:444 / Frame:480, 其 SLC 示意圖與涵蓋臺灣北部之雷達影像位置如圖 3-3。 依據前述兩項 InSAR 條件,選擇與其他影像垂直基線最小,且較位於 整體影像獲取時間中點的 SAR 影像作為主影像,用以獲得各像對間良好的 干涉成果。. 42.
(53) 表 3-1. ERS-2 雷達影像資訊. NO.. Satellite. year/month/date. orbit. 1 2 (master) 3 4 5 6 7 8 9 10 11 12. ERS-2. 1995/12/09. 3321. B⊥ (m) 296. ERS-2. 1996/01/13. 3822. 0. 0. ERS-2 ERS-2 ERS-2 ERS-2 ERS-2 ERS-2 ERS-2 ERS-2 ERS-2 ERS-2. 1997/12/13 19980117 19991113 19991218 20000122 20000506 20011222 20020302 20030111 20030322. 13842 14343 23862 24363 24864 26367 34884 35886 40395 41397. -337 -195 475 665 138 275 413 570 682 524. 700 735 1400 1435 1575 2170 2170 2240 2555 2625. ASAR. 20040515. 11537. 20041002 20041106 20041211 20051126 20060311 20070120 20070224 20070331 20071201 20080105 20080209. 13541 14042 14543 19553 21056 25565 26066 26567 30074 30575 31076. io. ASAR ASAR ASAR ASAR ASAR ASAR ASAR ASAR ASAR ASAR ASAR. n. al. Ch. engchi. B ⊥ -307 306. Days -175 -70. 0. 0. y. Orbit 9032 10535. 123 308 216 231 283 -323 116 -179 -39 664 -44. sit. Date 20031122 20040306. ‧. Sensor ASAR ASAR. Nat. NO. 1 2 3 (Master) 4 5 6 7 8 9 10 11 12 13 14. -35. ASAR 雷達影像資訊. 學. ‧ 國. 表 3-2. er. 立. 政 治 大. Days. i n U. v. 140 175 210 560 665 980 1015 1050 1295 1330 1365. PALSAR 衛 星 影 像 資 訊 是 以 日 本 宇 宙 航 空 研 究 開 發 機 構 ( Japan Aerospace Exploration Agency, JAXA)所公布,因 ALOS 衛星主要觀測日本 境內區域,對於臺灣地區監測策略為一年重覆觀測同一地表涵蓋兩次,時 間約為每年 11 月至隔年 3 月,故影像選擇有限。同時因 PALSAR 影像的涵 蓋範圍(圖 3-3)與 ERS-2、ASAR 不同,故本研究將包含實驗區內已獲取 之 PALSAR 影像皆加入 PS-InSAR 處理,所得 PALSAR 影像 6 幅,其資訊 43.
(54) 如表 3-3 所示。. 表 3-3 Sensor PALSAR. Date 20070112. Track/Frame 444/480. B ⊥ -1980. Days -46. PALSAR. 20070227. 444/480. 0. 0. PALSAR PALSAR PALSAR PALSAR. 20071130 20080115 20100120 20100307. 444/480 444/480 444/480 444/480. 882 1283 556 985. 276 322 1058 1104. 立. 政 治 大. 學 ‧. ‧ 國 io. sit. y. Nat. al. er. NO. 1 2 (master) 3 4 5 6. PALSAR 衛星影像資訊. v. n. 圖 3-3 研究範圍 PALSAR 雷達影像示意圖. Ch. engchi. 44. i n U.
(55) 第二節 研究工具 PS-InSAR 的處理過程繁複,雖市面上擁有相關的商業處理軟體,但過 高的價格使一般研究人員不易跨入此技術相關的應用及研發。隨近年來世 界各地災害頻傳,SAR 影像系統因其不受日夜與雲覆影響的優勢使得越來 越多研究者加入開發相關軟體的行列。 StaMPS(Stanford Method for Persistent Scatterers)於 2004 年由美國 Stanford 大學地球物理系 Hooper 與其研究團隊發佈,為一針對大形變區域 的免費永久散射體實驗程式,主要結合多種免費軟體(如 Doris、ROIPAC、 SNAPHU 與 triangle 等)進行 SAR 影像處理,以永久散射體概念消除 D-. 政 治 大. InSAR 技術對於影像品質的高門檻限制求得地表形變。其主程式呼叫其他. 立. SAR 影像處理軟體執行所需步驟,各軟體處理步驟及內容於本章第三節 PS-. ‧ 國. 學. InSAR 處理流程(圖 3-4)中說明。. 國內周峰泯(2009) 、張中白等(2010)使用此軟體處理北臺灣 ASAR. ‧. 影像,成功獲得與 GPS 與水準資料相符的成果,同樣於 2010 年,蕭逸凡處. sit. y. Nat. 理 ERS 資料用以偵測臺灣中部斷層地形變化,得到與斷層趨勢相同的升降. io. er. 結果。Ng 等學者於 2011 年利用此軟體針對桃園新竹進行 PS-InSAR 偵測地 表變化,得到的斷層活動變化與 GPS 監測成果相符。然而自 2007 年 ALOS. n. al. Ch. i n U. v. 衛星發射升空後,國內甚少使用 PALSAR 影像作為實驗資料執行 PS-InSAR. engchi. 技術,本研究為探討各類型資料於臺灣之差異,目的為比較已於臺灣實驗 過的 ERS、ASAR 以及未來可能運用之 PALSAR 衛星雷達影像,評估於臺 灣地區執行 PS-InSAR 技術之特性。. 45.
(56) 第三節 PS-InSAR 處理流程 PS-InSAR 是利用自然界中穩定的散射體作為角反射器,作為變遷偵測 的固定單點,省去人工放設置角反射器的步驟,更有機會達到大範圍、各種 地貌的觀測(蕭逸凡,2010)。本研究執行 PS-InSAR 技術流程以研究工具 StaMPS V3.2 為主(圖 3-4),以 PALSAR、ASAR 與 ERS-2 雷達影像資料 執行 PS-InSAR 技術。StaMPS 主要結合 ROIPAC、Doris、SNAPHU、Triangle 與以 MATLB 所撰寫的 PS 主程式構成 PS-InSAR 的處理。. 立. 政 治 大. ‧. ‧ 國. 學. n. al. er. io. StaMPS PS-InSAR 處理流程. sit. y. Nat. 圖 3-4. Ch. i n U. v. 合成孔徑雷達是以合成天線獲得高解析度雷達影像的技術,ROI_PAC. engchi. 在 SAR 影像的前處理中解算都卜勒相位中心,用以獲取接近地表之單觀點 複數影像,供後續 Doris 產製干涉條紋圖,Doris 利用處理層級 1.1 的 SLC 雷達影像進行 D-InSAR 二軌跡法處理(圖 3-5) 。而後 PS 候選方式依據 2001 年 Hooper 等學者所提出,分別利用影像振幅資料以及同調性資料作為選擇 PSC 的基準,接續加入影像相位資訊解算於各像對中穩固的永久散射體, 全相位回復相位週波整數值後分離相位資訊所包含的各像相位來源,包括 大氣誤差、數值地形模型誤差以及地表形變資訊。. 46.
(57) 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v. 圖 3-5 Doris D-InSAR 二軌跡法流程 在 Doris 處理軟體中,首先利用精密軌道資料初步套疊主、從雷達影 像,而後模擬現有 DEM 為雷達振幅影像,對位主影像以及模擬 DEM 雷達 影像,接續計算主影像與從影像之間的同調性精密對位,而後產製干涉條 紋影像,再利用衛星精密軌道資料對干涉圖進行平坦化處理,消除衛星於 47.
(58) 太空中拍攝地表形勢時,因為各像元與雷達天線間的距離不同,所產生因 地表曲率所造成的距離差值。D-InSAR 處理係利用現有 DEM 模擬相位資 訊,消除原干涉條紋相位資訊中所包含的地形差值,進而得到代表形變量 的數值形變干涉條紋圖。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 48. i n U. v.
(59) 第四章. 研究成果及分析. PS-InSAR 可以偵測地表變化,而此偵測地形變化的技術架構在 DInSAR 技術上,故本章節首先展示 D-InSAR 以及 PS-InSAR 成果,最後套 疊經濟部水利署於臺灣北部所做的精密水準測量資料,檢核 PS-InSAR 所 得到的地表變動量,用以提供完整的資料支持此研究執行 PS-InSAR 技術 對於地形變化的推估,並比較以各類型 SAR 影像於臺灣北部執行 PS-InSAR 技術的差異。. 第一節 實驗成果. 一、D-InSAR 成果. 立. 政 治 大. InSAR 技術所得到的干涉條紋圖是以兩張 SAR 影像依據干涉原理. ‧ 國. 學. 所得到的成果,用以建構影像涵蓋地區的地形模型,在干涉條紋較為 明顯的地區,即代表該地區的相位資訊完整度高,且可利用相位於區. ‧. 域的連續性,解算範圍內數值地形模型。而 D-InSAR 則是 InSAR 成. Nat. sit. n. al. er. io. 現。. y. 果去除因地形效應後所得到的相位資訊,同樣以干涉條紋圖的方式呈. i n U. v. 以下展示最終 ERS-2、ASAR 與 PALSAR 的 D-InSAR 成果,分別. Ch. engchi. 為像對基線以及 SAR 影像像對所組成的干涉條紋圖,其中像對基像 資訊是以表 3-1、表 3-2 與表 3-3 中的主影像為基準,計算各影像相對 於主影像的垂直基線長,圖中每一個圓圈代表一張 SAR 影像,而將兩 圓圈相連的線段則代表使用兩端的 SAR 影像所組成的像對,像對干 涉條紋則對應像對基線資訊中的像對,展示所形成的干涉條紋圖,用 以判別 D-InSAR 成果執行 PS-InSAR 的適宜性。. 49.
(60) 立. (a) 治 政 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. i n U. v. (b) 圖 4-1 ERS-2 (a)像對基線資訊 (b)像對干涉條紋圖 對應圖 4-1(a)像對基線資訊與圖 4-2(a)像對干涉條紋後可發 現,能形成較佳的干涉條紋的像對,基線長度通常介於 400 公尺內, 超過 400 公尺後則干涉成果明顯削減,如像對 1999/12/18-2000/05/06 雖擁有比像對 1999/11/19-2000/05/06 較短的時間間隔,但垂直基線約 為-432 公尺,較像對 1999/11/19-2000/05/06(垂直基線約-247)高出約 200 公尺,使得像對 1999/11/19-2000/05/06 干涉效果較像對 1999/11/192000/05/06 不明顯。另外影響干涉效果的重要因素為兩幅 SAR 時間間. 50.
(61) 隔,若像對橫跨過長時間,則不容易形成良好干涉。 然 2001 年以後 ERS-2 影像幾乎無法在初步對位時利用精密軌道 資料完成對位,故需加入人工調整的步驟。本研究利用 ESA 於近年內 推出的 NEST(Next ESA SAR Toolbox)開啟 SAR 影像的振幅資料, 手動量測各像對間的位移量作為對位的初始值,在,同調性的計算成 果中符合初步對位的要求,完成初步對位,進行後續 D-InSAR 計算。 依據圖 4-1 中藍色方框中的 D-InSAR 結果可以發現,所有 2001 年 以後的雷達影像與其他影像所組成的干涉像對皆無法形成良好干涉, 因為 PSC 的解算是利用相位資訊與周遭 PSC 共同求解,故此現象將. 政 治 大 排除 2001 年以後四張的 ERS-2 雷達影像,再次進入 PS-InSAR 處理 立 降低聯合解算 PSC 的可能。在考慮 PS 解算的方式與程序後,本研究. ‧ 國. 學. 程序,所組成的像對資訊以及 D-InSAR 成果如圖 4-2。在刪去 2001 年 以後的四張雷達影像後,雖仍有部分像對干涉效果無其他像對明顯,. ‧. 但其中的雷達影像皆有與其他雷達影像形成良好干涉,故使用此像對 組合進行 PS-InSAR 解算。. y. Nat. io. sit. 同樣在 ASAR 出現與 ERS-2 類似的情況,圖 4-3 展示本研究所選. n. al. er. 擇的 ASAR 14 張雷達影像所組成的干涉像對以及 D-InSAR 成果,圖. i n U. v. 4-3(b)中可以明顯發現,雖 2006/03/11 雷達影像與各雷達影像的垂. Ch. engchi. 直基線落於合適範圍,但所得到的 D-InSAR 成果皆未能於西部平原區 獲得良好的面狀干涉,在考慮 PSC 解算的因素下,排除 2006/03/11 雷 達影像解算 PS-InSAR。由於 ASAR 於 2005 年至 2006 年間較少垂直 基線合適之雷達影像,又 2006/03/11 雷達影像與其他雷達影像所組成 的像對干涉成果較差,在不加入前述雷達影像執行 PS-InSAR 處理的 前提下,2005~2007 年間則剩下一張 SAR 影像加入解算,故增加此影 像與其他影像所組成的像對,使該時期能得到可靠且有效的 PS-InSAR 成果(圖 4-4)。. 51.
(62) (a). 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. 圖 4-2. Ch. engchi. i n U. v. (b) 調整後 ERS-2(a)像對基線資訊 (b)像對干涉條紋圖. 52.
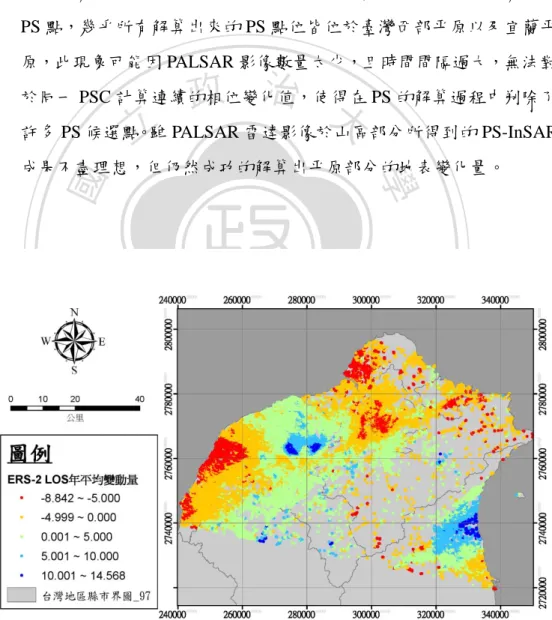
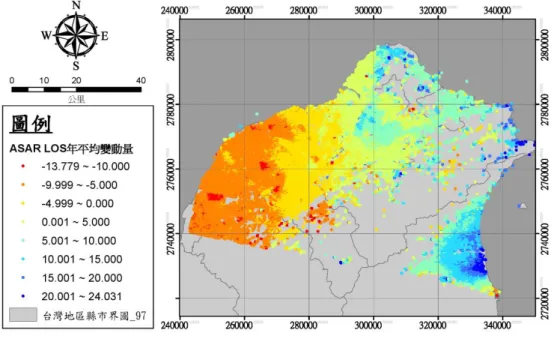
(63) 立. 治 政 (a) 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. 圖 4-3. Ch. engchi. i n U. v. (b) ASAR (a)像對基線資訊 (b)像對干涉條紋圖. 相較於 ERS-2 的 InSAR 成果,ASAR 在像對所構成的干涉圖中表 現較為良好,由圖 4-4 可看出幾乎所有像對干涉圖在西部平原皆可以 得到大範圍面狀的干涉成果,部分像對在宜蘭平原也可以形成干涉, 此現象表示在穩定出現干涉的地區能夠長時間的獲得穩定的相位資 訊,有利於找尋穩定的 PS 候選點,以供 PS 點為的解算。. 53.
數據
Outline
相關文件
In Paper I, we presented a comprehensive analysis that took into account the extended source surface brightness distribution, interacting galaxy lenses, and the presence of dust
The growth of the Chinese bamboo: Coaching, teaching and learning in promoting reading literacy in Hong Kong primary schools – Hong Kong students in PIRLS 2011.
Intel-臺大創新研究中心(Intel-NTU Connected Context Computing Center)成立於2011 年。這是英特爾實驗室( Intel Labs)與世界頂尖大學進行的「英特爾合作研究機構(Intel
看臺灣的攝影機就有四百多部(其中二百 多部是落於臺北市區),而這個網站甚至
“Water control and useful knowledge: river management and the evolution of knowledge in China, Northern Italy and the Netherlands.” Paper presented at the Global Economic
In this paper, by using Takagi and Sugeno (T-S) fuzzy dynamic model, the H 1 output feedback control design problems for nonlinear stochastic systems with state- dependent noise,
In this chapter, the results for each research question based on the data analysis were presented and discussed, including (a) the selection criteria on evaluating
(5)The Direction-Giving Language and the Empathetic Language of the principal have reach to the outstanding level of anticipa t i on f or t he t e a c he r ’ s j ob
