國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
以非量測性相機進行近景攝影測量探討
Analysis of Close-range Photogrammetry by Using
Non-metric Camera
研 究 生:鄒芳諭
指導教授:史天元
II
以非量測性相機進行近景攝影測量探討
Analysis of Close-range Photogrammetry by Using
Non-metric Camera
研 究 生:鄒芳諭
Student:Fang-Yu Tsou
指導教授:史天元
Advisor : Tian-Yuan Shih
國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master in
Civil Engineering July 2010
Hsinchu, Taiwan, Republic of China
I
以非量測性相機進行近景攝影測量探討
學生:鄒芳諭
指導教授:史天元
國立交通大學土木工程學系
摘要
三維模型之需求逐日增加,利用非量測性數位相機獲取之目標物影像,得到三維空 間資訊,已成為一項極具經濟效益之課題。非量測性數位相機之量測性應用,內方位參 數為關鍵因素,本研究選用三套近景攝影測量商用軟體 PhotoModeler、iWitness 及 Lensphoto 探討相機率定結果及像距與物距之關係。使用 Lensphoto 軟體以近景攝影測量 技術生成目標物之點雲,並與地面雷射掃描儀獲得之點雲,探討近景攝影測量之限制。 以平行及旋轉多基線攝影之方式,拍攝目標物影像,生成點雲資料並分析其精度。 研究成果顯示,兩次實驗在輻射距離最大之輻射透鏡畸變差之差值:PhotoModeler 為11.135 μm,iWitness 為 3.489 μm,Lensphoto 為 1.664 μm,PhotoModeler 之差值為最 大;最大輻射透鏡畸變差之平均:PhotoModeler 為 336.097 μm,iWitness 為 343.531 μm, Lensphoto 為 320.847 μm。相機率定時受率定標涵蓋影像畫面之限制,使鏡頭對焦距離 非無窮遠,則率定所得的焦距為像距。其中,由於 PhotoModeler 相機率定標之尺寸不同, 造成攝影物距不同,導致率定所得攝影像距差值達 1.04 mm。 鏡面雕塑之三維建模難以在近景攝影測量中實現,因鏡面會隨不同拍攝角度而呈現 不同之反射影像,造成立體像對無法匹配。載入 Lensphoto 軟體之影像受目標物涵蓋影 像範圍之限制,使匹配難以生成整體模型點雲。以平行與旋轉多基線攝影方式取得目標 物影像並經空三解算後生成點雲,平行多基線攝影之控制點及檢核點整體精度以 RMSE (Root Mean Square Error)表示,分別為 0.0066m 及 0.0678m,旋轉多基線交會攝影則分II 別為 0.0016m 及 0.0425m,顯示旋轉多基線交會攝影之精度高於平行多基線攝影方式。 在近景攝影測量與地面雷射掃描之精度比較,地面雷射掃描之控制點及檢核點整理精度 之 RMSE 分別為 0.0376m 及 0.0382m,結果顯示近景攝影測量之精度略高於地面雷射掃 描之精度。 關鍵字:非量測性相機、近景攝影測量、相機率定、地面雷射掃描、旋轉多基線交會攝 影、點雲。
III
Analysis of Close-range Photogrammetry by Using
Non-metric Camera
Student : Fang-Yu Tsou
Advisor : Tian-Yuan Shih
Department of Civil Engineering
National Chiao Tung University
Abstract
The demand of 3D models increased day by day, using non-metric digital camera to capture the image with 3D information, has a great economic benefit. In the non-metric digital camera applications, the interior orientation parameters are very important. This study used three sets of close-range photogrammetry software : PhotoModeler, iWitness and Lensphoto, and analyze the result of camera calibration and the relationship between image distance and object distance. Using Lensphoto software to generate point clouds of objects, analyze the limitations of close-range photogrammetry with the point cloud from ground laser scanner. Finally, analyze the accuracy of parallel multi-baseline and panning and multi-baseline digital close-range photogrammetry.
Results show that difference of the largest radial lens distortion on the largest radial : PhotoModeler is 11.135μm, and iWitness is 3.489μm, and Lensphoto is 1.664μm. Average of the largest radial lens distortion on the largest radial : PhotoModeler is 336.097μm, and iWitness is 343.531μm, and Lensphoto is 320.847μm. When object distance is equal to infinity, the image distance is equal to the focal length. Due to the different sizes of targets in PhotoModeler, the object distances are different and the difference of image distance up to 1.04mm.
IV
It is difficult that modeling 3D mirror sculpture in the close-range photogrammetry, because mirror will reflect rays in different angles and different reflectance sights, resulting stereopairs not match. Because the softwares of close-range photogrammetry have some restrictions of images, the object is difficult to reconstruct overall 3D model. The two methods of taking images are parallel multi-baseline and panning and multi-baseline, and generate point clouds. The RMSE (Root Mean Square Error) of control points and check points for parallel multi-baseline are 0.0066m and 0.0678m, and for panning and multi-baseline are 0.0016m and 0.0425m. From the result of Terrestrial Laser Scanning, it shows that the RMSE of control points and check points are millimeter. From the result of Terrestrial Laser Scanning, it shows that the RMSE of control points and check points are 0.0376m and 0.0382m. From the result of this research, the accuracy of close-range photogrammetry is slight higher than the accuracy of Terrestrial Laser Scanning.
Keyword: non-metric camera, close-range photogrammetry, camera calibration, Terrestrial Laser Scanning, panning and multi-baseline ,point cloud.
V
誌謝
我畢業了!!!兩年的碩士生涯終於結束了!!! 期間非常感謝恩師史天元教授,老師在學術研究上的執著精神及待人處事的態度, 使我刻骨銘心;老師在我課業與研究上的細心指導,及學習態度的諄諄教誨,使我獲益 匪淺,在此致上最真誠的謝意。另外,承蒙曾義星老師、蔡榮得老師與張智安老師在學 生論文口試期間不吝指正,並提供寶貴意見,使此論文得以順利完成,學生感激之情盡 在不言中。 這兩年,我有幸遇上俊毅學長與雅信學姐,不僅在課業與學習上無私地提供自身經 驗與技術支援,在日常生活中也很照顧我、幫助我,非常感謝你們。謝謝一起學習與成 長的同學們:凱程、卡拉、美芳、千惠、洵頡,也謝謝建成學長、恩銘學長、逸如學姐、 暐尊、佳筠與沐崧,謝謝研究所一起相處的所有人,使我彷彿身處在一個大家庭中,生 活中的酸、甜、苦、辣都可一同分享與承擔。 此外,謝謝靜玫跟小竹紫,我的可愛室友們,為我緊繃壓頂的碩二生活增添不少樂 趣,炮製一帖舒壓良藥。非常感謝老伴兒-依吟,傾聽我訴說心事,陪伴我迎面挑戰, 還有常常留在我桌上的驚喜便條,都是給予我最大的鼓勵。謝謝律吟、秉豬、家儀、凱 惠與小月,「有福同享、有難同當」用在我們身上最適合不過了。 最後要謝謝我親愛的爸爸、媽媽,總是把最好的留給我,並給我最大的支持與鼓勵, 謝謝你們給我最安心的避風港。VI
目錄
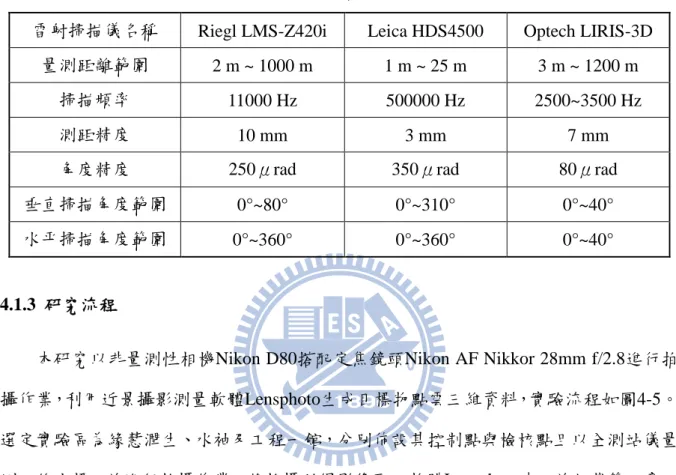
摘要 ... I ABSTRACT ... III 誌謝 ... V 圖目錄 ... VIII 表目錄 ... XI 第一章 前言 ... 1 1.1 研究動機與目的 ... 1 1.2 文獻回顧 ... 2 1.3 研究方法與流程 ... 3 1.4 論文架構 ... 4 第二章 近景攝影測量基礎理論 ... 5 2.1 透鏡成像幾何 ... 5 2.2 物空間坐標系統與像坐標系統之關係 ... 6 2.2.1 內方位參數 ... 6 2.2.2 透鏡畸變差 ... 7 2.2.3 外方位參數 ... 9 2.2.4 共線方程式 ... 9 2.2.5 空間前方交會 ... 11 2.3 核幾何原理 ... 12 2.4 影像匹配 ... 13 2.4.1 標準化互相關法 ... 14 2.4.2 最小二乘匹配法 ... 15 2.5 LENSPHOTO軟體處理影像之攝影方式 ... 17 2.5.1 平行多基線攝影 ... 18 2.5.2 旋轉多基線交會攝影 ... 18 第三章 內方位參數與其率定 ... 20 3.1 實驗資訊與流程 ... 20 3.1.1 資料獲取系統 ... 20 3.1.2 實驗流程 ... 21 3.2 相機率定程序 ... 22 3.2.1 PhotoModeler ... 22 3.2.2 iWitness ... 28 3.2.3 Lensphoto ... 34VII 3.3 實驗成果與分析 ... 41 3.3.1 內方位參數率定結果 ... 41 3.3.2 輻射透鏡畸變差 ... 45 3.3.3 像距與物距之關係 ... 49 3.3.4 相機率定之程式集評比 ... 51 第四章 三維模型點雲生成 ... 55 4.1 研究相關資訊與流程 ... 55 4.1.1 實驗區資訊 ... 55 4.1.2 研究數據介紹 ... 56 4.1.3 研究流程 ... 57 4.2 近景攝影測量點雲生成程序 ... 58 4.2.1 外業控制點量測與拍攝作業 ... 58 4.2.2 載入影像與空三匹配 ... 64 4.2.3 影像之控制點量測 ... 66 4.2.4 生成點雲 ... 67 4.3 實驗成果與分析 ... 69 4.3.1 實例一-鏡面雕塑 ... 69 4.3.2 實例二-應用近景攝影測量生成目標物點雲 ... 73 4.3.3 實例三-平行與旋轉多基線攝影測量 ... 77 4.3.4 近景攝影測量與地面雷射掃描精度比較 ... 82 第五章 結論與建議 ... 86 參考文獻 ... 88 附錄一、相機鏡頭拆裝實驗 ... 90 附 1.1 相機率定處理 ... 90 附 1.2 率定成果與分析 ... 93 附 1.3 小結 ... 95
VIII
圖目錄
圖 1-1 、研究流程圖 ... 3 圖 2-1、透鏡成像原理 ... 5 圖 2-2、近景攝影測量垂直攝影之示意圖(Arias, 2005) ... 6 圖 2-3、對稱輻射畸變差與離心畸變差示意圖(柯濤,2008) ... 9 圖 2-4、近景攝影測量垂直攝影時示意圖(龔健彬,1997) ... 11 圖 2-5、核幾何示意圖 ... 13圖 2-6、NCC 影像匹配之示意圖(修改自 Wolf & Dewitt, 2000) ... 15
圖 2-7、左右影像間幾何變形 ... 16 圖 2-8、考慮幾何變形之最小二乘匹配法圖示(修改自 Schenk, 1999) ... 16 圖 2-9、平行多基線攝影示意圖(柯濤, 2008) ... 18 圖 2-10、旋轉多基線交會攝影示意圖(柯濤, 2008) ... 19 圖 3-1、相機率定實驗流程圖 ... 21 圖 3-2、PhotoModeler 率定標 ... 22 圖 3-3、拍攝 PhotoModeler 率定標影像的位置示意圖 ... 23 圖 3-4、拍攝 PhotoModeler 率定標之影像 ... 24 圖 3-5、以 PhotoModeler 進行影像量測之結果 ... 26 圖 3-6、PhotoModeler 相機率定報告 ... 27 圖 3-7、iWitness 率定標及檢驗場佈設 ... 28 圖 3-8、拍攝 iWitness 率定標之實際位置 ... 29 圖 3-9、拍攝 iWitness 率定標之影像 ... 30 圖 3-10、以 iWitness 進行影像量測之結果 ... 32 圖 3-11、iWitness 參數率定結果之視窗 ... 33 圖 3-12、本實驗所用 Lensphoto 之網格 ... 35 圖 3-13、拍攝 Lensphoto 率定標影像的位置示意圖 ... 36 圖 3-14、拍攝 Lensphoto 率定標之影像組 set5 ... 37 圖 3-15、拍攝 Lensphoto 率定標之影像組 set6 ... 38 圖 3-16、Lensphoto 操作視窗 ... 39 圖 3-17、以 Lensphoto 進行影像量測之結果 ... 40 圖 3-18、Lensphoto 參數率定結果之視窗 ... 41 圖 3-19、PhotoModeler 之鏡頭對稱輻射畸變差折線圖 ... 46 圖 3-20、iWitness 之鏡頭對稱輻射畸變差折線圖 ... 46 圖 3-21、Lensphoto 之鏡頭對稱輻射畸變差折線圖 ... 47 圖 3-22、各軟體兩組率定結果之鏡頭輻射畸變差折線圖 ... 48 圖 3-23、六組實驗之輻射畸變差折線圖 ... 48 圖 3-24、拍攝 PhotoModeler 率定標位置 ... 53
IX 圖 3-25、拍攝 iWitness 率定標位置 ... 53 圖 3-26、拍攝 Lensphoto 率定標位置 ... 53 圖 4-1、緣慧潤生鏡面雕塑群組作品 ... 55 圖 4-2、實驗區之一-緣慧潤生外觀尺寸示意圖 ... 56 圖 4-3、實驗區之二-水袖外觀尺寸示意圖 ... 56 圖 4-4、實驗區之三-工程一館外觀尺寸示意圖 ... 56 圖 4-5、近景攝影測量生成點雲流程圖 ... 58 圖 4-6、緣慧潤生之控制點與檢核點示意圖 ... 59 圖 4-7、水袖之控制點與檢核點示意圖 ... 60 圖 4-8、工程一館之控制點與檢核點示意圖 ... 60 圖 4-9、拍攝緣慧潤生之影像 ... 61 圖 4-10、拍攝水袖之影像 ... 62 圖 4-11、平行多基線拍攝工程一館之影像 ... 63 圖 4-12、旋轉多基線拍攝工程一館之影像 ... 63 圖 4-13、建立專案之視窗,在此將影像分條帶後續處理 ... 64 圖 4-14、人工點選種子點操作視窗 ... 65 圖 4-15、粗略空三匹配之成果 ... 65 圖 4-16、影像控制點初步量測 ... 66 圖 4-17、影像控制點精密校正 ... 67 圖 4-18、經空三匹配與加密匹配之成果 ... 68 圖 4-19、未經編修之點雲展示 ... 68 圖 4-20、鏡面雕塑之立體像對 ... 70 圖 4-21、以 Photosynth 展示緣慧潤生點雲,(a)紅框表示 100% ... 71 圖 4-22、五個掃描站所生成之緣慧潤生全景點雲模型 ... 72 圖 4-23、五個掃描站生成之緣慧潤生點雲模型 ... 72 圖 4-24、經人工邊修後之緣慧潤生三維點雲資料 ... 73 圖 4-25、緣慧潤生邊修後之三維模型 ... 73 圖 4-26、水袖之環繞影像空三匹配成果 ... 74 圖 4-27、再次實驗所使用之水袖影像 ... 74 圖 4-28、使用之控制點及其與影像位置之關係 ... 74 圖 4-29、水袖之點雲展示 ... 75 圖 4-30、以 Photosynth 展示水袖之點雲 ... 76 圖 4-31、以地面雷射掃描儀獲取之水袖點雲 ... 77 圖 4-32、平行多基線攝影之點雲正視與俯視圖 ... 78 圖 4-33、旋轉多基線交會攝影之點雲正視與俯視圖 ... 79 圖 4-34、控制點及檢核點之位置關係 ... 79 圖 4-35、工程一館之光達點雲模型(正視圖) ... 83 圖 4-36、工程一館之光達點雲模型(斜視圖) ... 83
X 圖 4-37、工程一館之光達點雲模型(俯視圖) ... 84 圖 4-38、工程一館之光達點雲模型(局部放大圖) ... 84 附圖 1-1、拍攝 Lensphoto 率定標之影像 set7 ... 91 附圖 1-2、拍攝 Lensphoto 率定標之影像 set8 ... 92 附圖 1-3、拍攝 Lensphoto 率定標之影像 set9 ... 93
XI
表目錄
表 3-1、數位相機之相關規格表 ... 20 表 3-2、定焦鏡頭之相關規格表 ... 21 表 3-3、PhotoModeler 率定參數及精度之整理 ... 27 表 3-4、iWitness 率定參數之整理 ... 33 表 3-5、Lensphoto 率定參數之整理 ... 41 表 3-6、各組實驗之內方位參數率定結果 ... 42 表 3-7、各組實驗之內方位參數標準差 ... 43 表 3-8、各組實驗之相機鏡頭畸變程度 ... 44 表 3-9、輻射畸變差實驗之差值與平均 ... 47 表 3-10、六組實驗之攝影物距 ... 49 表 3-11、物距與像距之關係 ... 50 表 3-12、近景攝影測量軟體相機率定之評比 ... 51 表 3-13、率定標影像拍攝位置及數量 ... 52 表 4-1、地面雷射掃描儀參數表 ... 57 表 4-2、平行與旋轉多基線攝影之控制點精度 ... 81 表 4-3、平行與旋轉多基線攝影之檢核點精度 ... 81 表 4-4、兩種攝影方法涵蓋控制點之影像數 ... 82 表 4-5、控制點精度比較表 ... 85 表 4-6、檢核點精度比較表 ... 85 附表 1-1、相機經鏡頭拆裝及率定後之內方位參數與標準差 ... 94 附表 1-2、相機鏡頭經拆裝及率定後之鏡頭畸變程度 ... 951
第一章
前言
1.1 研究動機與目的
攝影測量(Photogrammetry)技術從早期類比攝影測量時代演變於現今數位攝影測 量時代,舉凡資料獲取、軟硬體設備、處理效率等皆大幅提升。近景攝影測量(Close-range Photogrammetry)是透過對目標物進行攝影,且攝影物距不超過 300 公尺之攝影測量 (Wolf & Dewitt, 2000)。近景攝影測量為對目標物拍攝影像並經由影像量測處理後,確 定目標物形狀、大小、運動型態、三維空間坐標及其周邊環境空間資訊之一種獲取方法。隨著相機的普及,今日可用不斷推陳出新且價格較低的高解析度非量測性數位相機 (Non-Metric Digital Camera)來代替量測性相機。Karara & Faig(1980)對非量測型相 機的定義是:內方位元素全部或部份未知,或已知但不穩定者。Fryer(1996)因非量測 性相機之內方位元素較不穩定,且鏡頭畸變差較嚴重,進行量測性應用時必頇經過相機 率定,決定其內方位元素與鏡頭畸變差。 數位三維模型之需求逐日增加,可應用之領域廣泛,包含土木、測量、數位典藏及 文化資產等。目前產製三維模型方法有兩種,一種為近景攝影測量獲取之影像經相機率 定,外方位解算,影像匹配,獲得目標物三維資訊,成為一項極具經濟效益之課題。另 一種常用於建物模型重建測量方法為雷射掃描儀(Laser Scanning),又稱為光達(LIght Detection and Ranging, LIDAR),可快速且高精度獲取大量的點雲(Point Cloud)資料。 針對非量測性相機所發展之近景攝影測量軟體,皆各自具備相機率定方式與操作程 序,因此本研究使用非量測性相機及三個近景攝影測量軟體進行相機率定,探討其率定 處理流程與成果差異。利用能生成點雲之旋轉多基線攝影測量軟體,生成目標物點雲, 加入地面雷射掃描之點雲數據,探討近景攝影測量軟體之限制及精度比較,並以實例分 析平行多基線攝影與旋轉多基線攝影方式之精度及適用時機。
2
1.2 文獻回顧
龔健彬(1997)使用非量測性相機APS、非量測性數位相機DC210及量測性相機P32, 進行三個實例(MONIWA試驗體、成大檢定場及交大電子資訊大樓)的模擬測試,當 APS相機像片比例尺約1/500時,相對精度可達平均物距之1/500;DC210相機相對精度可 達平均物距之1/330。 劉虹妤(2001)設計一種可供自動辨識及定位的人工標點及自動量測之程序,以達 到相機率定之自動化,整合自動辨識及量測功能於相機率定系統中。其可解決自率光束 法繁重之量測工作,並以研究成果顯示相機率定及定位標準差可達公分級以下精度。 廖彥舒(2004)以六種不同性質的非量測型數位相機,真實畫素由300萬到600萬不 等,針對自訂的模型,物距1620 mm拍攝立體像對,透過自行設計整合的像對點位量測 系統,進行控制點與檢核點的直接線性轉換法(Direct Linear Transformation,DLT)解 算,經實證結果得到檢核點中誤差與物距比為1/3406 ~ 1/2140,成果顯示非量測性相機 之解算已達相當精度。 柯濤(2008)研究一種可提高測量精度與生產效率的近景攝影測量方法-旋轉多基 線數值近景攝影測量,其透過旋轉攝影增加攝影視場角,應用多基線交會攝影增大攝影 交會角以提高交會精度,且解決近景攝影測量中大交會角影像難實現自動匹配的困難。 同時將傳統的區域網空中三角測量原理應用於影像外方位元素的解算,並實現對旋轉多 基線攝影數據的全自動處理。 吳笛豪(2008)將近景攝影測量獲取實驗區之數位影像以iWitness軟體進行三維模 型重建,並以全測站量測物空間控制點及檢核點之三維坐標,以控制點及檢核點之均方 根誤差呈現近景攝影測量及地面雷射掃描儀所達到之模型量測精度。近景攝影測量之量 測精度,控制點及檢核點之總均方根誤差皆為8 mm;地面雷射掃描成果分析,控制點 及檢核點之總均方根誤差皆為11 mm。根據實驗成果,近景攝影之平面精度略高於地面 雷射掃描,地面雷射掃描之高程(景深)精度則略高於近景攝影。3
1.3 研究方法與流程
本研究分為兩部分進行,第一部分:以商用近景攝影測量軟體進行相機率定,第二 部分:以旋轉多基線數值近景攝影測量系統生成點雲。圖1-1為本研究流程圖。 內方位率定 Lensphoto軟體處理 與點雲生成 外業量測控制點 與拍攝作業 佈設率定檢驗場 實驗區選定 實例探討與分析 拍攝作業 不同程式集 率定成果比較 圖 1-1、研究流程圖 1. 以近景攝影測量軟體率定相機參數 選擇三個商用數值近景攝影測量軟體PhotoModeler、iWitness及Lensphoto進行相機 率定。首先分別佈設相機率定檢驗場,並以非量測性數位相機Nikon D80搭配28mm定焦 鏡頭進行拍攝作業,將影像匯入軟體處理相機率定。分析相機參數率定結果,並探討像 距與物距之關係。 2. 以旋轉多基線數值近景攝影測量軟體生成點雲 以非量測性相機Nikon D80拍攝目標物影像,並用全站儀量測目標物控制點與檢核 點之三維坐標,將所得影像及控制點坐標載入旋轉多基線數值近景攝影測量軟體- Lensphoto中,以兩種攝影方式:平行多基線攝影及旋轉多基線交會攝影生成目標物點雲, 探討其使用時機。加入地面雷射掃描之點雲資料,比較近景攝影測量與地面雷射掃描之4 精度,並探討近景攝影測量之限制。
1.4 論文架構
第一章:說明本研究之動機與目的及本研究之方法與流程。 第二章:與本研究相關近景攝影測量基礎理論,包含內外方位參數、透鏡畸變差、 共線式方程式、影像匹配、攝影方式等。 第三章:以三軟體 PhotoModeler、iWitness 及 Lensphoto 進行內方位率定實驗,分 析率定成果及操作流程、可靠性等評比。 第四章:以旋轉多基線攝影測量軟體 Lensphoto 生成目標物點雲資料,並加入地面 雷射掃描所獲得之點雲資料,探討近景攝影測量之限制及精度分析。 第五章:整體實驗成果之結論與建議。5
第二章
近景攝影測量基礎理論
攝影測量之中心透視投影,光線經三維空間之物點通過透視投影中心至像平面上對 應物點之像點,三點共線,其為攝影測量原理之主軸。本章先介紹透鏡成像原理,再引 出近景攝影測量基礎理論。2.1 透鏡成像幾何
簡易透鏡由一片光學玻璃所組成,其可以是兩球面或一球面、一平面之組合,通過 透鏡各面曲率中心之直線為透鏡之光軸(Optical Axis),如圖 2-1 中 連線。平行光軸 之光線射入透鏡後,聚焦於透鏡之光軸上一點,是為焦點(Focal Point),圖中之 F 與 F’。 透鏡中心至焦點之距離為焦距(Focal Length),記作 f,通過焦點且垂直光軸的平面稱 為焦平面(Focal Plane)。透鏡前方的物體,每個物點經光束通過透鏡並聚集在透鏡後方 成一像點,涵蓋整個物體之無窮多個像點聚集於像平面(Image Plane)。當物距 o(物體 與透鏡中心間之距離)為無窮遠時,物點上所有光束會聚焦於焦平面上;若物距非無窮 遠,則像距 i(透鏡中心至像平面之距離)會大於焦距。以透鏡成像公式(Lens Equation) 來表達物距 o、像距 i 與焦距 f 之關係: ··· (2-1) 若透鏡之焦距與物距為已知,可用透鏡成像公式來推算像平面的位置。 圖 2-1、透鏡成像原理6
2.2 物空間坐標系統與像坐標系統之關係
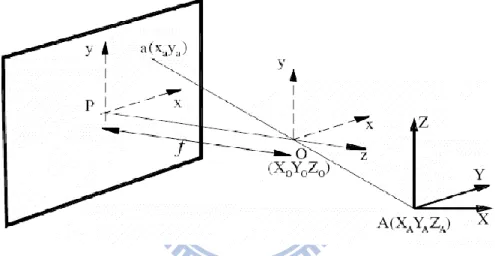
物空間坐標系統與像空間坐標系統之關係可由中心透視投影(Central Perspective Projection)描述。所謂中心透視投影是由物體所發出或反射的光線,依照光線的直進性 經過一投影中心,投影在像平面上。圖 2-2 中,三維物空間之物點 A(XA , YA , ZA)穿過
透視投影中心 O(X0 , Y0 , Z0),投影在像平面上為像點 a(xa , ya),其三點共線(Collinearity)。
點 P 為像平面上之像主點(Principal Point, PP),像主點至透視投影中心之距離為像主距 (Principal Distance),物距無窮遠時像主距等於焦距 f。
圖 2-2、近景攝影測量垂直攝影之示意圖(Arias, 2005)
2.2.1 內方位參數
內方位元素(Element of Interior Orientation)為恢復拍攝瞬間,相機透視投影中心 與像片或影像間相對關係之參數,包含相機率定後焦距及像主點在像坐標系統之坐標改 正值。除了上述三個廣義之內方位元素(f , xp , yp),尚包含透鏡畸變差改正量Δx、Δy,
在 2.2.2 描述。
(1) 率定後焦距(Wolf & Dewitt, 2000)
相機透鏡之後節點(Rear Nodal Point)沿著攝影光軸到像平面上像主點之距離,為 率定後焦距(Calibrated Focal Length, CFL),亦可稱作率定後像主距(Calibrated Principal
7 Distance)。相機製造時,會盡量將率定後焦距接近光學透鏡焦距,但仍有差異,因此以 率定後焦距稱之。一般以 f 標記之。 (2) 像主點 相機攝影光軸垂直交於像平面上之點稱之,此為像平面坐標之真正原點。傳統光學 量測性相機皆以影像上對邊框標兩兩連線之交點為影像中心,稱為框標中心(Fiducial Center, FC),為框標坐標系統之原點。理論上框標中心與像主點應為同一點,但事實上 有差異,其微小偏差量為(xp , yp),應改正為以像主點為原點之坐標值。 2.2.2 透鏡畸變差 相機鏡頭由球面透鏡所組成,拍攝影像時,投射光線通過相機鏡頭產生折射現象, 導 致 影 像 形 變 且 像 點 偏 移 而 無 法 投 影 在 像 點 正 確 位 置 , 造 成 無 法 滿 足 共 線 條 件 (Collinearity Condition)。因此率定相機時,除了 2.2.1 所敘述的內方位元素外,尚頇對 造成影像形變之透鏡畸變差進行率定。主要有輻射透鏡畸變差(Radial Lens Distortion)、 離心透鏡畸變差(Decentric Lens Distortion),說明如下:
(1) 輻射透鏡畸變差
輻射畸變差一般是由於鏡頭形狀缺陷(Imperfect Lens Shape)所引起,只與像點離 像主點的距離有關,使成像點沿輻射方向偏離其理準確位置(Weng, 1992)。其以對稱 像主點(Principal Point of Symmetric, PPS)為中心,像點沿著輻射方向產生移位,有輻 射對稱的特性,故又稱對稱輻射透鏡畸變差(Symmetric Radial Lens Distortion),且離對 稱像主點之輻射距離越大則輻射畸變量越大。包含正輻射畸變差與負輻射畸變差,像點 相對於對稱像主點往外移者,為正輻射畸變差;像點相對於對稱像主點往內移者,為負 輻射畸變差,如圖 2-3(a)所示,黑色框線為正確的影像點位,a、b 分別為正、負輻射畸 變差所造成的影像變形。Wolf & Dewitt(2000)輻射畸變差改正公式:
8 其中, , , 。求得輻射畸變差後,可依幾何關係 計算像點於像坐標 x 軸與 y 軸方向之改正量(δx, δy): , ··· (2-3) : 對稱輻射畸變差 k1, k2, k3, k4 : 對稱輻射畸變差係數 r : 像點至像主點之輻射距離 , : 改正像主點偏移之像坐標 x , y : 量測而得之像坐標 xp , yp : 像主點偏移量 δx, δy : 對稱輻射畸變差之改正量 (2) 離心透鏡畸變差 組裝相機鏡頭時,鏡片排列中心未對準相機主軸,或製造鏡片時兩球面中心對 準之誤差,造成入射相機之光線行進方向非一直線,當光線投射至像平面時,影像 產生非對稱形變,如圖 2-3(b)所示。離心透鏡畸變差可分為輻射方向之分量(Radial Component)與正切方向之分量(Tangential Component)之畸變差,正切方向之分 量垂直於輻射方向之分量。Brown(1971)提出改正方程式如下: ··· (2-4) ··· (2-5) : 離心畸變差之改正量 p1, p2, p3, p4 : 離心畸變差係數 將對稱輻射畸變差與離心畸變差合併,得透鏡畸變差在像坐標 x 軸方向之總改正量 ,及在 y 軸方向之總改正量 ,影像上之像點位置改正公式如下:
9 ·· (2-6) ·· (2-7) xc , yc : 改正像主點偏移及透鏡畸變差後之像坐標 (a) 對稱輻射畸變差 (b) 離心畸變差 圖 2-3、對稱輻射畸變差與離心畸變差示意圖(柯濤,2008) 2.2.3 外方位參數
外方位元素(Element of Exterior Orientation)為重建攝影瞬間相機透視投影中心於 物空間坐標系統之位置(Position)與姿態(Attitude),其以六個參數表達。三個位置參 數,包含攝影瞬間透視投影中心之物空間坐標(X0 , Y0 , Z0);三個姿態參數,包括攝影 瞬間相機之旋轉姿態角(ω, φ, κ)。當恢復相機內方位元素(f , xp , yp)及外方位元素(X0 , Y0 , Z0 , ω, φ, κ)後,可達到物點 A、相機攝影中心 O 與像點 a 之三點共線條件,如圖 2-2 所示。 2.2.4 共線方程式 數學上物點、像點與透視投影中心之關係,可用共線方程式(Collinearity Equations) 來表示,其應用於攝影測量各個層面,如空間前方交會與後方交會、空中三角測量及影
10 像正射糾正等。圖 2-2 為中心透視投影幾何之物點 A、透視投影中心 O 及像點 a 三點共 線,其數學方程式如下: ··· (2-8) ··· (2-9) xa, ya : a 點之影像坐標 xp , yp : 像主點偏移量 f : 相機焦距長 XA , YA , ZA : 點 A 之物空間坐標 X0 , Y0 , Z0 : 攝影中心之物空間坐標 m11 ~ m33 : 為 3×3 旋轉矩陣 R 之元素 δx, δy : 對稱輻射畸變差之改正量 旋轉矩陣 R 為旋轉元素 ω,φ,κ 之函數:
11 像點、物點及透視投影中心三點共線之關係,實際上和理論上會有些微差異,因存 在系統誤差而造成像平面上之點位坐標偏移,影響點位物空間坐標之解算精度。系統誤 差主要來源為鏡頭畸變差、底片變形或不平坦、大氣折光及地球曲率等因素,在近景攝 影測量中,通常不考慮大氣折光及地球曲率的影響。為消除系統誤差之影響,可將附加 參數(Additional Parameters)加入共線式中,以做為系統誤差之補償。將 2.2.2 所描述 的對稱輻射透鏡畸變差改正量(δx, δy)及離心畸變差改正量(Δx, Δy)加入共線式中, 則原有共線式可改寫為: ··· (2-10) ··· (2-11) 2.2.5 空間前方交會 空間前方交會(Space Intersection)數學模式是以共線方程式為基礎,利用立體對 重疊影像之共軛光束實施前方交會為攝影測量獲取物點坐標的基本做法,如圖 2-4 所示, 將線性化的共線方程式以最小二乘法平差模式迭代求解未知物空間坐標。理論上單像光 束無交會點,故無法求解三維空間物點坐標(X, Y, Z),但若結合數值地形模型(Digital Terrain Model, DTM),利用光束與數值模型表面交會為物點之原理亦可解算空間坐標。 X Z O2 O1 Y x y x y x1 y1 y x2 2 f2 f1 B X Y P 圖 2-4、近景攝影測量垂直攝影時示意圖(龔健彬,1997) A
12 在一般垂直攝影情況(如圖 2-4 所示),假設攝影機光軸與物空間坐標系統之 Z 軸 平行,O1和 O2為攝影站位置,A 點為物空間中的物點,則 A 點在左右兩張影像之像坐 標分別為(x1, y1)和(x2, y2), 為左影像旋轉矩陣之元素, 為 右影像旋轉矩陣之元素。其數學模式如下: 左影像: ··· (2-12) ··· (2-13) 右影像: ··· (2-14) ··· (2-15)
2.3 核幾何原理
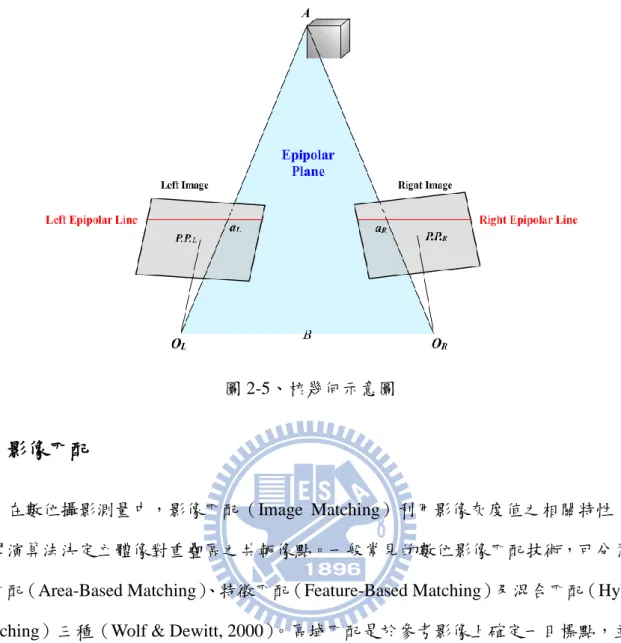
以共面條件式為基礎所建立之核幾何(Epipolar Geometry)原理,在攝影測量中最 常用於影像自動匹配,可將影像匹配由二維搜尋簡化之一維搜尋,提高效率及可靠性。 如圖 2-5 所示,左、右兩影像之透視投影中心 OL、OR及物點A在物空間中所組成之平面,稱為核面(Epipolar Plane)。物點對應之像點 aL、aR,位於核面與左、右影像像平
面相交之直線上,為核線(Epipolar Lines)。兩立體像對之左、右核線為共軛核線 (Conjugate Epipolar Lines),左影像像點 aL與右影像像點 aR為共軛點,其必然分別落
於左核線與右核線上。以兩透視投影中心連線 為核軸(Epipolar Axis),物空間中每 個物點與其構成一個核面,故核面有無窮多個,其與像平面相交之核線也無窮多。影像 匹配時,可將左影像上之像點作為參考點,搜尋右影像上之共軛點時將共軛點的搜尋建 立在一維核線上,節省搜尋次數與時間而提升自動化效能。
13
圖 2-5、核幾何示意圖
2.4 影像匹配
在數位攝影測量中,影像匹配(Image Matching)利用影像灰度值之相關特性,以 數學演算法決定立體像對重疊區之共軛像點。一般常見的數位影像匹配技術,可分為區 域匹配(Area-Based Matching)、特徵匹配(Feature-Based Matching)及混合匹配(Hybrid Matching)三種(Wolf & Dewitt, 2000)。區域匹配是於參考影像上確定一目標點,並以 其為中心設計目標視窗,至另一影像之搜尋視窗中尋找最相似區域,找尋方式為計算搜 尋視窗中像元之灰度值相似程度,並以相關係數作為相似度指標,最相似區域之中心像 元位置代表共軛像點;特徵匹配之目的為在影像中灰度值變化較明顯的地方,萃取影像 目標物之點、線、面特徵,根據不同特徵與應用發展出不同特徵匹配演算法:基於點特 徵(Point-based)、邊界特徵(Edge-based)及區塊特徵(Segment-based)等匹配法,針 對特徵之幾何屬性加以描述並作相似性評估,獲得共軛像點;混合匹配為結合上述兩種 方法,先強調左右影像中之邊界特徵,再以區域匹配得到共軛像點(Wolf & Dewitt, 2000)。
14
小二乘匹配法(Least Squares Matching, LSM)等。柯濤(2008)提及 Lensphoto 軟體在 空三匹配之粗略匹配時使用標準化互相關法,而空三精密匹配時使用最小二乘匹配法。 此兩種方法茲加以介紹如下。
2.4.1 標準化互相關法
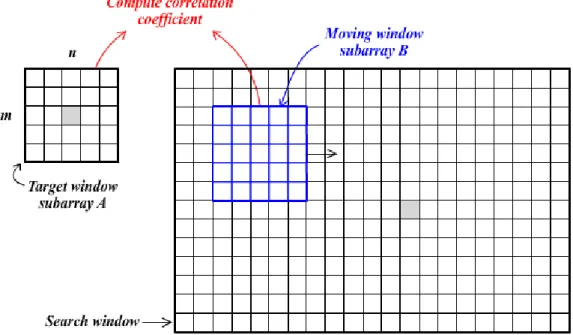
標準化互相關法(NCC)是依統計相關原理進行影像匹配,經找尋目標視窗與其搜 尋視窗中相重疊區域之灰度值互相關係數(Cross Correlation Coefficient)最大者,為最 佳匹配位置(吳怡燊,2003)。Wolf & Dewitt(2000)說明在立體像對之左、右影像分 別選取相同大小(m×n)之子陣列 A、B,其相關係數是透過子陣列內像元灰度值之計算 得到,方程式如下: ··· (2-16) c : 相關係數(-1 ≦ c ≦ 1) i, j : 子陣列中像元所在之行列值 Aij , Bij : 子陣列之像元灰度值 , : 子陣列中像元灰度平均值 圖 2-6 為標準化互相關法計算相關係數之示意圖,此影像匹配法以左影像上目標點 之像元為中心,選取 m×n 灰度值子陣列作為目標視窗 A,在右影像上設計較目標視窗大 且易找到共軛像點之搜尋視窗,與目標視窗相同大小之移動視窗 B 將在搜尋視窗內以公 式(2-16)計算,得到相關係數矩陣,其中最大相關係數值即為匹配點位置。 計算所得相關係數值為:-1 ≦ c ≦ 1,當 c = 1 為高相關性之完美匹配,實際上影像 受到噪聲(noise)干擾等因素影相關係數僅能接近 1,通常設定一門檻值(例如:0.7), 當相關係數值超過門檻值便視為匹配(Wolf & Dewitt, 2000)。當 c = 0 表示匹配點位與 目標點無相關性;當 c = -1 代表匹配點與目標點為負相關性,例如:正、負片之匹配。
15
圖 2-6、NCC 影像匹配之示意圖(修改自 Wolf & Dewitt, 2000)
2.4.2 最小二乘匹配法 最小二乘匹配法(Ackermann, 1983)主要為求取目標視窗與搜尋視窗中像元灰度值 差異最小之位置,其為最佳匹配位置。數學模式上,是以影像灰度值進行最小二乘法平 差計算,可獲得共軛點位之次像元(Sub-pixel)精度。最小二乘匹配法分為兩大類,一 種為僅考慮輻射變形而不考慮幾何變形之最小二乘匹配法(LSM1),另一種為輻射變形 與幾何變形皆考慮之最小二乘匹配法(LSM2),本文在此介紹 LSM2。LSM2 同時考慮 兩種影像灰度值之變形:輻射變形與幾何變形,輻射變形由照明條件、目標物輻射面方 向、大氣與相機物鏡之衰減等原因所造成;產生幾何變形之因是由相機透鏡畸變差、傾 斜攝影造成影像透視畸變及地形造成之影像畸變等。 圖 2-7 為左右影像間之幾何變形示意圖,根據中心透視投影原理,目標物區塊為四 邊形 ABCD,兩攝影中心 S1 與 S2,對應目標物區塊之影像視窗分別為左影像之矩形 a1b1c1d1,右影像之任意四邊形 a2b2c2d2。圖 2-8 為 LSM2 圖示,目標視窗 m0經參數轉換 後在搜尋視窗中變成 m1形狀,並在搜尋視窗中與各個相對應灰度值相減,組成觀測方 程式,利用最小二乘法原理解算對應中心像元之坐標,即共軛像點之位置。
16 圖 2-7、左右影像間幾何變形 (柯濤,2008) 圖 2-8、考慮幾何變形之最小二乘匹配法圖 示(修改自 Schenk, 1999) 以 表示目標視窗像元位置之灰度值函數, 為搜尋視窗像元 位置之灰度值函數,利用仿射轉換(Affine Transformation)來描述目標視窗與搜尋視窗 之幾何轉換,基本方程式如下: ··· (2-17) ··· (2-18) ··· (2-19) 以(2-18)與(2-19)式改寫(2-17)式,如下: ··· (2-20) 其中 ,a0~a2、b0~b2 為仿射轉換六個參數, 表示 經 A 仿射轉換後所對應搜尋視窗之像元灰度值;h1:輻射灰度值平移參數,h2:
17 尺度參數;寫為誤差方程式(2-21),並將 G1及 G2中分別存在之隨機雜訊 n1及 n2同殘 差(Residual)處理。 ··· (2-21) 式(2-21)中元素解釋如下: ··· (2-22) ··· (2-23) 其中觀測值 為搜尋視窗與目標視窗相對應像元之灰度差值,改正數 為搜尋視窗與目標視窗之隨機雜訊差值。因式(2-21)為非線性方程式,將 F 對 h1、h2、a0、a1、a2、b0、b1及 b2八個未知數偏微分予以線性化後,可依最小二乘法
進行迭代計算求解。
2.5 Lensphoto 軟體處理影像之攝影方式
Lensphoto 軟體處理之影像主要攝影方式有二種:一種為平行多基線攝影,另一種 為旋轉多基線交會攝影。兩種方法皆是基於共線方程式空間前方交會法求解近景物體之 三維空間坐標,並且可利用多餘觀測值(多張影像)和最小二乘平差原理進行多片前方 交會(柯濤,2008)。 在數值近景攝影測量中,無論是量測性數位相機還是非量測性數位相機,其最大缺 點為像幅小,導致相機之視場角小。因此若依傳統垂直攝影方式進行攝影,會降低攝影 光線之交會角,而降低交會精度;交會攝影是近景攝影測量中常用的方式,藉由交會攝 影可增大交會角,進而提高精度。但當交會角度超過 15 度時,影像的自動化匹配尌變 得困難(張祖勛,2007)。所以為了解決交會精度及影像自動化匹配的矛盾,可採用多 基線交會攝影。18 2.5.1 平行多基線攝影 對目標物之攝影距離相同,以攝影光軸約略垂直目標物方向進行拍攝,如圖 2-9 所 示,S1~Sn為攝影站有 n 站,O1~On為每個攝影站僅拍攝 1 張影像之攝影光束,各個攝 影光束間約略平行且垂直攝影目標物。依 Lensphoto V2.0 操作手冊所述,相鄰攝影站所 拍攝影像之左右重疊率頇達 80%,且攝影站的個數至少要 3 個以上,會有較佳的成功率。 圖 2-9、平行多基線攝影示意圖(柯濤, 2008) 2.5.2 旋轉多基線交會攝影 旋轉多基線交會攝影流程如下(柯濤,2008): (1) 根據目標物寬度及相機拍攝之地面覆蓋範圍,將目標物依水平方向劃分為若干「條 帶(Strips)」,且兩兩劃分的條帶頇具 60%以上重疊度,以確保條帶間有足夠的連結點。 (2) 根據攝影距離決定攝影基線長度及攝影站個數。相鄰攝影站個數間的基線長度應小 於攝影距離的 20%,以確保相鄰攝影站影像間的交會角α小於 10°,易於自動化匹配; 同時首尾攝影站的基線長度應大於攝影距離的 55%,以保證測區內影像間的最大交會角 β不小於 30°,確定交會精度(交會角越大,基線越多,影像數也越多,考慮數據處理 效率及精度之平衡,30°為較合理的交會角;若相鄰基線交會角為 10°,此時攝影基線個 目標物
19 數為 3,因此攝影站個數至少為 3 個以上)。 (3) 將相機焦距調整至無窮遠,拍攝時保證每張影像焦距及景深不變。 (4) 在每個攝影站上手持相機,透過旋轉攝影方式,對準每一條帶中心進行連續攝影。 圖 2-10 中,待攝目標物被劃分為 5 個條帶,共設置 4 個攝影站,每個攝影站旋轉 拍攝 5 張影像。黑色與白色粗線為被攝目標物之條帶劃分,黑色圓點 S1~S4代表攝影站, 黑色直線為攝影光束,阿拉伯數字為影像拍攝順序,虛線矩形區為同條帶內影像的地面 覆蓋範圍。 圖 2-10、旋轉多基線交會攝影示意圖(柯濤, 2008) 條帶 1 條帶 2 條帶 3 條帶 4 條帶 5 S1 S2 S3 S4 目標物
20
第三章
內方位參數與其率定
使用非量測性相機獲取之影像,進行量測性應用時,內方位參數為重要關鍵。而非 量測性相機所發展之攝影測量軟體,皆各自具備有相機率定的方式與處理程序,因此本 研究選用三套近景攝影測量商用軟體,以實驗方式探討率定結果及像距與物距之關係。3.1 實驗資訊與流程
3.1.1 資料獲取系統 內方位參數率定資料取得由相機拍攝影像而來,本實驗選用非量測性數位單眼相機 Nikon D80 搭配 Nikon AF Nikkor 28mm f/2.8 定焦鏡頭進行拍攝作業,表 3-1、表 3-2 分 別為相機與鏡頭相關規格資訊。 表 3-1、數位相機之相關規格表 相機型號 數位單眼相機 Nikon D80 感測器說明 1020 萬有效畫素,Nikon DX format CCD 感測器大小 23.6 × 15.8 mm 影像尺寸 3872 × 2592 pixels (L) 2896 × 1944 pixels (M) 1936 × 1296 pixels (S) ISO 感光度 Auto, 100 ~ 1600, up to 3200 像素大小 0.006 mm 快門速度 30 ~ 1/4000 秒 對焦模式 手動/自動對焦 儲存系統 NEF (RAW), JPEG21 表 3-2、定焦鏡頭之相關規格表 鏡頭型號 Nikon AF Nikkor 28mm f/2.8 最小光圈 f 22 對焦距離 25 cm ~ ∞ 最大重現比率 1/5.6 3.1.2 實驗流程 近景攝影測量軟體有各自處理相機率定方式,本研究選擇三個數值近景攝影測量軟 體及其版本:2007 年加拿大 EOS 公司所開發之 PhotoModeler V6,2006 年澳洲 Photometrix 公司所發表之 iWitness V1.2.3,及 2006 年武漢大學與朗視軟件公司合作研 發之 Lensphoto V2.0,搭配上述數位相機與鏡頭,分別佈設檢驗場,進行拍攝作業,軟 體操作相機率定,探討相機率定結果,率定實驗流程圖如圖 3-1 所示。在實地拍攝過程 中,相機設定為影像最大解析度(3872 × 2592 pixels),鏡頭光圈設定為最小值(f 22), 增加景深。拍攝時將變焦模式改為手動,但為使率定標成像清晰並未將鏡頭對焦距離調 整至無窮遠(∞)。在拍攝過程中,相機安置於三腳架上,避免手震晃動影響影像品質。 佈設相機率定 檢驗場 拍攝作業 程式集相機率定 率定結果 探討與分析 圖 3-1、相機率定實驗流程圖
22
3.2 相機率定程序
本研究選用三套近景攝影測量軟體:PhotoModeler、iWitness 及 Lensphoto 進行相機 率定,各軟體皆有各自率定標、拍攝模式及率定處理流程等,本小節對此三軟體之相機 率定程序分別作說明。 3.2.1 PhotoModeler 佈設檢驗場 PhotoModeler 軟體可自動化處理相機率定,隨軟體附有兩種規格正方形率定標,一 為邊長 21.0 cm,另一為邊長 91.44 cm,圖 3-2 為兩種規格之率定標。兩種尺寸率定標皆 以高色彩反差的白底黑圓點等距排列成正方形。邊長 21.0 cm 的率定標有 100 個點,邊 長 91.44 cm 的率定標有 144 個點,皆含有 4 個控制點,分別位於率定標 4 個角落,如圖 3-2 紅框所示。佈設檢驗場時,將兩種規格率定標電子檔出圖,拉平黏貼於白色木板, 再擺置於地板上。 圖 3-2、PhotoModeler 率定標,左為 21.0 cm,右為 91.44 cm23 拍攝作業 對兩種規格率定標各拍攝一組影像,21.0 cm 所拍得的影像以 set1 表示,91.44 cm 拍得的影像以 set2 表示。圖 3-3 為拍攝位置示意圖,在方形率定標的 4 個邊方向各拍 3 張影像,相機正拍一張、正 90 度旋轉相機與負 90 度旋轉相機各拍一張,因此共有 12 張影像,兩組率定標皆以此方式拍攝。 圖 3-4 為拍攝之影像,上排:正拍所得,中排:正 90 度旋轉相機拍得影像,下排: 負 90 度旋轉相機拍得影像。軟體進行率定處理時,限制率定標成像必頇涵蓋影像範圍 80%,拍攝 set1 影像之率定標涵蓋範圍為 90%,set2 影像之率定標涵蓋範圍為 92%。拍 攝 set1 影像後,鏡頭經拆卸、裝載才進行 set2 拍攝。 相機正拍 相機機身+90°旋轉拍攝 相機機身-90°旋轉拍攝 圖 3-3、拍攝 PhotoModeler 率定標影像的位置示意圖
24 set1 set2 圖 3-4、拍攝 PhotoModeler 率定標之影像 率定處理及結果 在 PhotoModeler 相機率定中,影像坐標改正函數使用 7 個參數模型,包含廣義的 3 個內方位參數和 4 個附加參數表示鏡頭畸變差。其率定參數分別為:
相機內方位參數(Camera interior orientation):f , xp , yp
輻射畸變差參數(Radial distortion parameters):K1 , K2
25 相關數學函式如下: ... (3-1) ... (3-2) ... (3-3) ... (3-4) ... (3-5) ... (3-6) ... (3-7) 式中 , : 改正像主點偏移之像坐標 x , y : 量測而得之像坐標 xp , yp : 像主點偏移量 r : 像點至像主點之輻射距離 dr : 對稱輻射透鏡畸變差 xc ,yc : 改正後之像點像坐標 將拍攝影像匯入軟體進行自動化影像量測與參數率定,圖 3-5 為軟體處理率定標影 像量測結果。白色中空十字標表示可量測到率定標正確位置;灰色十字標表示可量測出 率定標的圓點形心像素,但因殘差太大而不加入率定解算;無十字標的圓點表示成像不 清晰無法量測,也不加入率定解算。若影像中的 4 個控制點有其中一個無法量測,此張 影像便不加入解算,如 set1 編號 2、4、8 影像,圖 3-5 之紅框所示。
26 set1 set2 圖 3-5、以 PhotoModeler 進行影像量測之結果 圖 3-6 為率定報告,表 3-3 為率定參數與精密度(Precision)之整理。內方位參數 (f , xp , yp):set1 為 30.638 mm、0.046 mm、0.124 mm,set2 為 29.598 mm、0.043 mm、 0.011 mm,其兩組內方位參數之率定後焦距差異達 1.04 mm,在 3.3.3 討論。內方位參 2 4 8
27 數之標準差(Deviation):set1 為 0.007 mm、0.006 mm、0.006 mm,set2 為 0.001 mm、 0.001 mm、0.001 mm,顯示 set2 的標準差較 set1 小,即邊長 91.44 cm 率定標的率定結 果較邊長 21.0 cm 率定標之精度高。 Set1 Set2 圖 3-6、PhotoModeler 相機率定報告 表 3-3、PhotoModeler 率定參數及精度之整理 相機參數 set1 標準差 set2 標準差 f (mm) 30.6383 0.007 29.5983 0.001 xp (mm) 0.0464 0.006 0.0426 0.001 yp (mm) 0.1238 0.006 0.0112 0.001 K1 1.404×10-4 9.6×10-7 1.481×10-4 3.2×10-7 K2 -1.238×10-7 3.8×10-9 -1.427×10-7 1.2×10-9 P1 2.228×10-5 1.4×10-6 2.696×10-5 3.2×10-7 P2 -1.630×10-5 1.5×10-6 -1.900×10-5 3.5×10-7
28 3.2.2 iWitness 佈設檢驗場 本實驗以 iWitness 原廠設計的率定標完成相機自動率定,其率定標共有 12 片紙板, 每片皆由黑色紙板為主體且內含排列成「T」字的 5 個實心圓點,共有 60 個率定標點。 圓點大小相同,顏色為螢光的紅色或綠色,每片的圓點顏色組合不盡相同,但皆與黑色 紙板呈現明顯對比。佈設檢驗場時,將 12 片率定標擺置地板上,其中 2 片置於高約 10 公 分的物體上,使與另外 10 片率定標位於不同平面,如圖 3-7 紅色方框所示的兩片率定 標。 圖 3-7、iWitness 率定標及檢驗場佈設
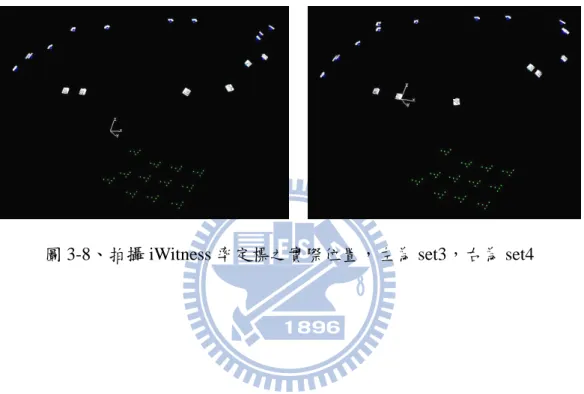
29 拍攝作業 對率定標拍攝兩組影像(以 set3、set4 表示),拍攝兩組影像過程中無拆卸相機鏡頭。 環繞率定標作 8 個方向(4 個邊及 4 個對角方向)正拍,並在檢驗場四個對角線方向以 正、負 90 度旋轉相機機身拍攝,共拍得 18 張影像。圖 3-8 為實際拍攝率定標的位置, 圖 3-9 為拍攝所得的影像。
30 set3 set4 圖 3-9、拍攝 iWitness 率定標之影像 率定處理及結果 iWitness 近景攝影軟體影像坐標改正函數使用 10 個參數模型,除了廣義的 3 個內方 位參數外,尚包含 7 個附加參數來表示鏡頭畸變差。其率定參數分別為:
31
相機內方位參數(Camera interior orientation):f , xp , yp
輻射畸變差參數(Radial distortion parameters):K1 , K2 , K3
離心畸變差參數(Decentring distortion parameters):P1 , P2
仿射、非正交參數(Affinity, non-orthogonality parameters):B1 , B2
相關數學函式除了式(3-1)、式(3-2) 與式(3-3)外,其輻射透鏡畸變差(dr)及改正後之像點 坐標(xc , yc)如下: ... (3-8) ... (3-9) ... (3-10) 式中 , : 改正像主點偏移之像坐標 r : 像點至像主點之輻射距離 dr : 對稱輻射透鏡畸變差 xc ,yc : 改正後之像點像坐標 完成拍攝後將影像載入軟體中進行自動化影像量測與參數率定,圖 3-10 為軟體操 作影像量測。藍色編號為像點預測位置,綠色編號為像點正確位置,紅色框為出現錯誤 訊息區域。由於拍攝影像之傾斜角度不同,會有不同程度之像點偏移,而出現錯誤訊息 的像點在其他影像中仍可量測到,因此可進行初步相機率定,得到參數 f , xp , yp , K1 , K2 , K3。再將原預設固定的參數(P1 , P2 , B1 , B2)取消掉,便可再次率定得到完整率定結果。
32
set3
set4
圖 3-10、以 iWitness 進行影像量測之結果
圖 3-11 為初步率定及二次率定對照圖,視窗中左排數據為初步率定、右排數據為 二次率定之結果,自率光束法平差之單位權中誤差:set3 為 0.22 pixels,set4 為 0.42 pixels。 兩組參數率定結果整理於表 3-4,內方位參數(f , xp , yp):set3 為 29.051 mm、0.064 mm、
33 -0.139 mm,set4 為 29.062 mm、0.049 mm、-0.159 mm,其兩組內方位參數之率定後焦 距差異僅 0.011 mm。 set3 set4 圖 3-11、iWitness 參數率定結果之視窗 表 3-4、iWitness 率定參數之整理 相機參數 set3 set4 f (mm) 29.0508 29.0621 xp (mm) 0.0643 0.0491 yp (mm) -0.1389 -0.1587 K1 1.414×10-4 1.373×10-4 K2 2.622×10-8 3.549×10-8 K3 -6.729×10-10 -5.863×10-10 P1 1.958×10-5 2.343×10-5 P2 -8.269×10-6 3.057×10-6 B1 7.659×10-6 -1.049×10-4 B2 1.098×10-4 5.504×10-5
34 3.2.3 Lensphoto 佈設檢驗場 此軟體可設定率定網格點的大小與間距,使網格點在拍攝時成像清晰,並可選擇以 電腦液晶螢幕(LCD)顯示平面網格點或列印網格點成紙張,進行相機率定。本實驗以 19 吋電腦液晶螢幕(30.4 cm × 37.9 cm)顯示平面網格點,將其置於高度 74 公分的桌上, 完成檢驗場佈設。圖 3-12(a)設定格點直徑 3 mm 及間距 12 mm,共有 567 個格點規 則排列成 21 列、27 行。圖 3-12(b)為 LCD 所顯示的平面網格點,除了率定標中央有 三個控制點為紅、綠、藍色外,其於網格點皆為黑色,與白色背景呈明顯對比。圖 3-12 (c)為控制點放大圖,紅、綠、藍點編號 0、1、2,為後續相機率定處理時標定控制點 之順序。
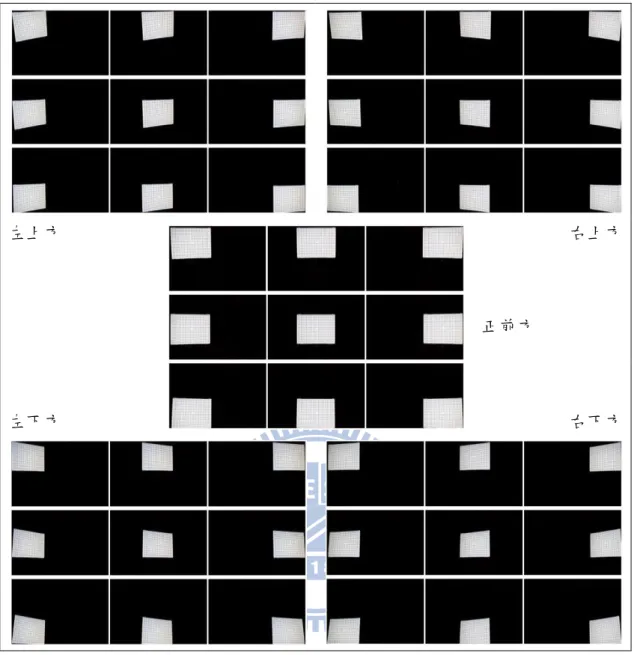
35 (a) (c) (b) 圖 3-12、本實驗所用 Lensphoto 之網格,(a)網格設定視窗, (b)平面網格點,(c)率定標網格控制點 拍攝作業 於 LCD 前面 5 個不同的位置拍攝影像,如圖 3-13 中的星形標記(S1~S5)所示, 分別為面對 LCD 的正前方、左上方、右上方、左下方及右下方位置。在每個攝影站藉 由旋轉或俯仰相機拍攝以獲取影像,影像數量取決於率定標成像範圍的大小,且頇確保 於每個攝影站上之率定標均勻成像在像幅的不同範圍。例如:率定標可清晰成像且佔滿 整個像幅,則每個攝影站只需拍一張影像。本研究在每個攝影站上拍攝了 9 張影像,使 率定標成像均勻分佈在像幅的不同位置,呈九宮格排列,如圖 3-13 像幅分佈及編號 1~9。
36 圖 3-13、拍攝 Lensphoto 率定標影像的位置示意圖 本研究共拍攝兩組率定影像,以 set5、set6 表示,兩組影像拍攝過程中鏡頭未拆卸。 圖 3-14、圖 3-15 為拍攝所得影像,在 LCD 的正前方、左上方、右上方、左下方及右下 方各拍攝 9 張影像,使此 9 張影像均勻成像在像幅的不同位置,形同九宮格的安排。一 攝影站拍攝 9 張影像,五個攝影站,共拍得 45 張影像。拍攝時,關閉室內檢驗場燈光, 以利 LCD 明亮顯示率定標網格點,白底黑圓點的率定標與黑暗背景皆成良好色彩反差。
37
左上方 右上方
正前方
左下方 右下方
38 左上方 右上方 正前方 左下方 右下方 圖 3-15、拍攝 Lensphoto 率定標之影像組 set6 率定處理及結果 Lensphoto 在相機率定所使用的參數與相關數學模式和 PhotoModeler 相同。其率定 參數為:
相機內方位參數(Camera interior orientation):f , xp , yp
輻射畸變差參數(Radial distortion parameters):K1 , K2
39 將拍攝所得的 45 張率定標影像匯入軟體中進行半自動相機率定,圖 3-15 為加載率 定標影像後之操作視窗。圖 3-16 中編號 a 及 b 的區塊為影像列表,區塊 c 為展示所選擇 的率定標影像並可縮放影像,接著在放大視窗(區塊 d)以手動的方式點選控制點坐標 方位,順序為圖 3-12(c)所示之數字編號(0→1→2):紅→綠→藍,即軟體設定率定 標之坐標方位:原點→X 軸→Y 軸。每張影像皆需人工點選 3 個控制點,點選完三個控 制點時,系統會自動量測網格點坐標,提取所有點的輪廓及其坐標方位,圖 3-17 為系 統量測坐標後以紅色十字標標記每個網格點之位置。手動點選完 45 張影像後,可執行 控制點平差與相機率定,求得內方位參數,解算成果與精度在區塊 e 展示。 圖 3-16、Lensphoto 操作視窗
a
d
b
c
e
40 圖 3-17、以 Lensphoto 進行影像量測之結果 圖 3-18 為解算結果,因求得的 K1、K2、P1、P2參數代入解算畸變差之值為改正量, 將其表示成參數於表 3-5。內方位參數(f , xp , yp):set5 為 28.713 mm、0.008 mm、-0.130 mm,set6 為 28.815 mm、0.073 mm、-0.136 mm,其兩組內方位參數之率定後焦距差異 僅 0.102 mm。內方位之標準差:set1 為 1.080×10-5 mm、2.790×10-6 mm、2.806×10-6 mm, set2 為 9.055×10-6 mm、2.340×10-6 mm、2.354×10-6 mm,兩組參數率定結果之精度差異 不大。
41 set5 set6 圖 3-18、Lensphoto 參數率定結果之視窗 表 3-5、Lensphoto 率定參數之整理 相機參數 set5 標準差 set6 標準差 f (mm) 28.7134 1.080×10-5 28.8145 9.055×10-6 xp (mm) 0.0082 2.7907×10-6 0.0732 2.340×10-6 yp (mm) -0.1302 2.806×10-6 -0.1357 2.354×10-6 K1 1.456×10-4 4.109×10-9 1.485×10-4 3.416×10-9 K2 -1.678×10-7 3.506×10-11 -1.793×10-7 2.901×10-11 P1 4.852×10-5 1.548×10-8 2.676×10-5 1.291×10-8 P2 -1.454×10-5 2.457×10-8 -1.778×10-5 2.043×10-8
3.3 實驗成果與分析
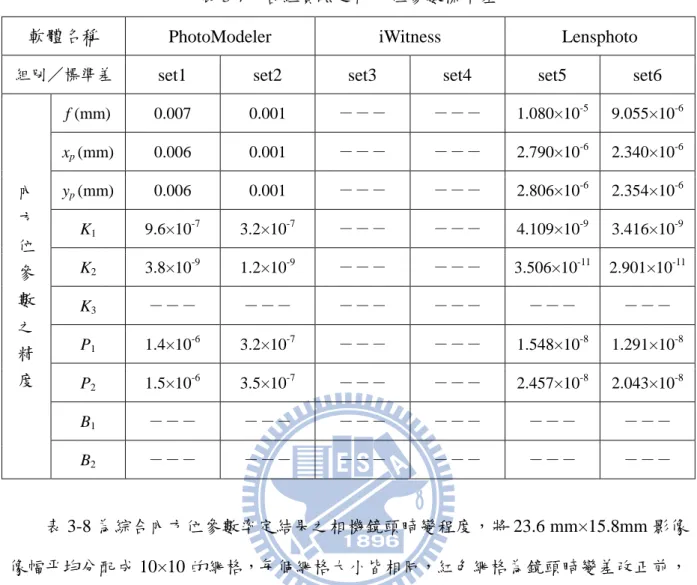
以三軟體率定非量測性數位相機之內方位參數,其結果以相機鏡頭透鏡畸變差來作 探討,並引出像距與物距之關係,再將三軟體之相機率定程序作整理比較。 3.3.1 內方位參數率定結果 在相機率定時,其所使用的附加參數不盡相同,PhotoModeler 與 Lensphoto 系統皆 使用四個附加參數:對稱輻射畸變差參數 K1、K2及離心畸變差參數 P1、P2,對影像進 行改正;而 iWitness 使用 7 個附加參數:除了上述 4 個外,尚包含對稱輻射畸變差 K342
及仿射參數 B1、B2,對影像進行改正。六組實驗之內方位參數率定結果整理於表 3-6,
其中 PhotoModeler 兩組實驗,set1 使用 21.0 cm 率定標,率定後的焦距(f)為 30.6383 mm; set2 使用 91.44 cm 率定標,率定後的焦距為 29.5983 mm,兩組實驗之率定後焦距差異 大,在 3.3.3 討論。各組實驗之內方位參數標準差整理於表 3-7,其中 iWitness 軟體無提 供內方位參數率定後的標準差,因此 set3 與 set4 沒有數據;比較 PhotoModeler 及 Lensphoto 軟體的內方位參數率定結果,Lensphoto 軟體的標準差較小,精度較高。
表 3-6、各組實驗之內方位參數率定結果
軟體名稱 PhotoModeler iWitness Lensphoto 組別 set1 set2 set3 set4 set5 set6
內 方 位 參 數 f (mm) 30.6383 29.5983 29.0508 29.0621 28.7134 28.8145 xp (mm) 0.0464 0.0426 0.0643 0.0491 0.0082 0.0732 yp (mm) 0.1238 0.0112 -0.1389 -0.1587 -0.1302 -0.1357 K1 1.404×10 -4 1.481×10-4 1.414×10-4 1.373×10-4 1.456×10-4 1.485×10-4 K2 -1.238×10 -7 -1.427×10-7 2.622×10-8 3.549×10-8 -1.678×10-7 -1.793×10-7 K3 --- --- -6.729×10 -10 -5.863×10-10 --- --- P1 2.228×10-5 2.696×10-5 1.958×10-5 2.343×10-5 4.852×10-5 2.676×10-5 P2 -1.630×10 -5 -1.900×10-5 -8.269×10-6 3.057×10-6 -1.454×10-5 -1.778×10-5 B1 --- --- 7.659×10 -6 -1.049×10-4 --- --- B2 --- --- 1.098×10 -4 5.504×10-5 --- ---
43
表 3-7、各組實驗之內方位參數標準差
軟體名稱 PhotoModeler iWitness Lensphoto
組別/標準差 set1 set2 set3 set4 set5 set6
內 方 位 參 數 之 精 度 f (mm) 0.007 0.001 --- --- 1.080×10-5 9.055×10-6 xp (mm) 0.006 0.001 --- --- 2.790×10-6 2.340×10-6 yp (mm) 0.006 0.001 --- --- 2.806×10-6 2.354×10-6 K1 9.6×10 -7 3.2×10-7 --- --- 4.109×10-9 3.416×10-9 K2 3.8×10 -9 1.2×10-9 --- --- 3.506×10-11 2.901×10-11 K3 --- --- --- --- --- --- P1 1.4×10 -6 3.2×10-7 --- --- 1.548×10-8 1.291×10-8 P2 1.5×10 -6 3.5×10-7 --- --- 2.457×10-8 2.043×10-8 B1 --- --- --- --- --- --- B2 --- --- --- --- --- --- 表 3-8 為綜合內方位參數率定結果之相機鏡頭畸變程度,將 23.6 mm×15.8mm 影像 像幅平均分配成 10×10 的網格,每個網格大小皆相同,紅色網格為鏡頭畸變差改正前, 黑色網格為改正鏡頭畸變差後之示意圖。六組實驗相機未率定前之紅色網格變形,皆與 圖 2-3(a)之 b 線較為接近,像主點偏移量及像點最大變形量如表 3-8 所示。像主點偏移 量:set1 為 22.03 pixels,set2 為 7.34 pixels,set3 為 25.51 pixels,set4 為 27.69 pixels, set5 為 21.74 pixels,set6 為 25.70 pixels;以 iWitness 軟體率定後之像主點偏移量較大, PhotoModeler 軟體率定邊長 91.44 cm 率定標之像主點偏移量為最小。像點最大變形量: set1 為 70.40 pixels,set2 為 59.62 pixels,set3 為 75.10 pixels,set4 為 76.33 pixels,set5 為 66.87 pixels,set6 為 71.70 pixels;同樣以 iWitness 軟體率定後之像點最大變形量為較 大,PhotoModeler 軟體率定邊長 91.44 cm 率定標之像點最大變形量為最小。
44 表 3-8、各組實驗之相機鏡頭畸變程度 set1 set2 像主點偏移量:22.03 pixels 像主點偏移量:7.34 pixels 像點最大變形量:70.40 pixels 像點最大變形量:59.62 pixels set3 set4 像主點偏移量:25.51 pixels 像主點偏移量:27.69 pixels 像點最大變形量:75.10 pixels 像點最大變形量:76.33 pixels set5 set6 像主點偏移量:21.74 pixels 像主點偏移量:25.70 pixels 像點最大變形量:66.87 pixels 像點最大變形量:71.70 pixels
45 3.3.2 輻射透鏡畸變差 將對稱輻射畸變差繪製成折線圖,以影像上對稱像主點為原點,橫軸模擬以像主點 為中心至像點之輻射距離 r(單位:mm),縱軸為對稱輻射畸變差 dr(單位:μm)。在 對稱輻射畸變差的折線上,每隔 1 mm 輻射距離便標記其所對應的對稱輻射畸變量,本 研究所使用相機影像感測器大小為 23.6 mm×15.8 mm,在影像上最大輻射距離(影像像 幅對角線之半)為 14.2 mm。圖 3-19、圖 3-20、圖 3-21 分別為軟體 PhotoModeler、iWitness、 Lensphoto 兩組實驗對稱輻射畸變差折線圖,橫軸之輻射距離為 0~15 mm,縱軸之對稱 輻射畸變量為 0~400 μm,紅色數值表示影像上像點在最大輻射距離之對稱輻射畸變差。 以軟體作區別,圖 3-22 為各軟體分別兩次實驗率定結果之輻射畸變量折線圖,各 軟體內兩組實驗之最大對稱輻射畸變量折線差異程度由大至小:PhotoModeler>iWitness >Lensphoto。圖 3-23 為六組實驗數據之輻射畸變差折線圖,六組數據很接近,Lensphoto 兩組對稱輻射畸變量數值較小,曲線在最下方;iWitness 兩組對稱輻射畸變量較大,曲 線在最上方;而 PhotoModeler 兩組差異較大的曲線介於前述兩軟體間。最大對稱輻射畸 變差之差值與平均整理於表 3-9,影像上最大輻射距離所對應之最大輻射畸變差,兩組 實驗差值最大為 PhotoModeler 的 11.136 μm,最小為 Lensphoto 的 1.664 μm;兩組實驗 平均值最大為 iWitness 的 343.531 μm,最小為 Lensphoto 的 320.847 μm,差異小僅達 22.684 μm。
46 圖 3-19、PhotoModeler 之鏡頭對稱輻射畸變差折線圖 圖 3-20、iWitness 之鏡頭對稱輻射畸變差折線圖 0.14 1.13 3.82 9.07 17.7130.57 48.4071.87 101.44137.33 179.37 226.82 278.26 331.28 382.30 341.79 0 100 200 300 400 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 dr (μm) set3 0.14 1.10 3.71 8.81 17.22 29.76 47.19 70.22 99.36 134.96 177.00 225.02 277.97 333.95 345.28 390.06 0 100 200 300 400 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 r (mm) set4 0.14 1.12 3.76 8.86 17.16 29.36 46.08 67.8395.04 128.02 166.93 211.81 262.49 318.67 330.53 379.84 0 100 200 300 400 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 dr (μm) set1 0.15 1.18 3.96 9.33 18.0730.88 48.4071.15 99.54133.83 174.14 220.41 272.39 329.64 341.66 391.47 0 100 200 300 400 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 r (mm) set2
47 圖 3-21、Lensphoto 之鏡頭對稱輻射畸變差折線圖 表 3-9、輻射畸變差實驗之差值與平均 軟體 組別 最大輻射畸變差 (μm) 差值 (μm) 平均 (μm) PhotoModeler set1 330.529 11.136 336.097 set2 341.665 iWitness set3 341.787 3.488 343.531 set4 345.275 Lensphoto set5 320.015 1.664 320.847 set6 321.679 0.15 1.16 3.89 9.15 17.68 30.14 47.12 69.05 96.23128.87 166.77 209.84 257.58 309.28 320.01 363.98 0 100 200 300 400 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 dr (μm) set5 0.15 1.18 3.97 9.32 18.00 30.68 47.92 70.16 97.67130.54 168.78 211.99 259.68 311.05 321.68 365.03 0 100 200 300 400 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 r (mm) set6
48 圖 3-22、各軟體兩組率定結果之鏡頭輻射畸變差折線圖 圖 3-23、六組實驗之輻射畸變差折線圖 330.53 341.66 0 100 200 300 400 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 PhotoModeler set1 set2 341.79 345.28 0 100 200 300 400 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 dr (μm) iWitness set3 set4 320.01 321.68 0 100 200 300 400 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 r (mm) Lensphoto set5 set6 0 100 200 300 400 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 dr (μm) r (mm) set1 set2 set3 set4 set5 set6
49 3.3.3 像距與物距之關係 拍攝率定標影像時,若將鏡頭對焦距離調整至無窮遠(∞),為使控制點成像清晰, 造成率定標涵蓋影像畫面不足而軟體無法處理相機率定。受到率定標涵蓋影像畫面之限 制,在拍攝時欲取得清晰控制點影像,未將鏡頭對焦距離調整至無窮遠,導致軟體率定 結果之 f 非為率定後焦距長,而是像距。 表 3-10 是以固定相機鏡頭焦距長 28 mm 及軟體率定報告得到的像距,代入透鏡成 像公式,得到拍攝率定標影像的物距。因 set1 為 21.0 cm 之率定標,拍攝時為了率定標 成像清晰且涵蓋足夠畫面,物距較小,僅 32.5 cm;set2 為 91.44 cm 之率定標,拍攝時 為使率定標控制點皆在影像畫面中,需較長的物距,為 51.9 cm;物距差 19.4 cm,解釋 set1 與 set2 所得 f 值率定結果之差值達 1.04 mm。 表 3-10、六組實驗之攝影物距 軟體 組別 像距(mm) 物距(m) PhotoModeler set1 30.6383 0.325 set2 29.5983 0.519 iWitness set3 29.0508 0.774 set4 29.0621 0.766 Lensphoto set5 28.7134 1.127 set6 28.8145 0.991 根據透鏡成像公式,焦距為定值,拍攝時物距不同會造成像距的不同。本實驗使用 28 mm 定焦鏡頭,焦距為定值,定焦物距範圍 25 cm ~ ∞,可推算不同物距所對應的像 距,表 3-11 為物距與像距之關係。 根據透鏡成像公式,式(2-1),焦距 f = 28 mm 為定值: (1) 當物距 o = 25 cm, ,得到像距 i = 31.5315 mm