國立高雄大學電機工程學系產業碩士班
碩士論文
利用光纖光柵於電壓感測技術之研究
The Study of Voltage Sensing by Using Fiber Bragg
Grating.
研究生:林瑋晉 撰
指導教授:施明昌 博士
ii
摘要
利用光纖光柵於電壓感測技術之研究
指導教授:施明昌 博士 國立高雄大學電機工程學系 學生:林瑋晉 國立高雄大學電機工程學系產業碩士班 本論文最主要希望發展一項光纖感測器技術,可應用於智慧家庭監控系統上。本 研究利用布拉格光纖光柵來量測電壓;針對直流電源的量測,系統中將光纖光柵固定 於壓電式機構,利用外加電壓與光纖光柵布拉格波長之位移關係,得到線性穩定的直 流電壓的感測,量測電壓範圍:0V~150V 精確度可以達到±10V,針對交流電源量測 時,將光柵固定於一交流驅駛振動機構,利用振動諧頻的振幅與外加驅駛電源之關 係,再利用光纖光柵訊號解調儀系統,把所量測到的光纖光柵與外加電壓變化量的關 係,量測交流電壓範圍 80V~110V 精確度可以達到±5V。 關鍵字:光纖光柵、光纖光柵電壓感測器、驅駛振盪iii
ABSTRACT
The Study of Voltage Sensing by Using Fiber Bragg
Grating.
Advisor: Professor Ming Chang, Shih Department of Electrical Engineering
National University of Kaohsiung
Student: Wei Chin , Lin Institute of Electrical Engineering National University of Kaohsiung
In this thesis we demonstrate an AC/DC power measurement system based on the fiber Bragg grating sensing technique for the development of smart house safety monitoring. A fiber Bragg grating DC voltage transducer constructed by the piezo-electric tube is able to achieve DC voltage measurement within 0 V-150 V ranges with an accuracy of ±10 V, and a fiber Bragg grating AC voltage transducer constructed by the electro-magnetic vibrator is able to achieve AC voltage measurement within 0 V-150 V RMS with accuracy of ±5 V. In addi-tion, a theoretical model of the fiber grating AC transducer base on the driven oscillation sys-tem was developed to analyze key parameters of factors of the fiber grating AC voltage trans-ducer such as mass, spring constant and damping factor.
iv
誌謝
來到研究所的一年的多日子裡,首先要感謝的是指導我的老師施明昌老師,在 老師的不厭其煩一次又一次的教導我,除了學到很多光電領域上的知識外,也讓我 學到許多有關人生觀的寶貴經驗,更讓我學習到從事研究應有的專注以及耐心,且 在老師循序漸進的方式教導之下,受益良多。尤其是老師研究方向的經驗談,對論 文撰寫上有極大的幫助,才得以順利完成學業。再者要感謝口試委員,藍文厚博士、 李孟恩博士撥冗對本論文的指導,於口試時所給予的建議與想法,才可使論文得以 更加完善。 感謝實驗室學長志賢,同學彥廷、子緯,學弟穎宏,在實驗上幫忙許多,當在 實驗上有遇到困難或是瓶頸時彼此鼓勵加油打氣,也不忘在每天的生活日子裡相 互關懷,歡樂與共,在研究所的日子有更多的快樂時光,每天心情愉快使得實驗得 以順利進行。感謝助理琬淇、瓊萱的幫忙,關於實驗室有許多行政事物的協助,讓 我可以專心的從事研究。 感謝我的爸媽,給予我很多很多精神上的支持與鼓勵,且讓我在無後顧之憂 的環境順利的完成我學業;在我研究所的兩年裡,因為有你們的陪伴,這一路走 來都不孤單。最後,也謝謝在高大所認識所幫助過我的每一個人。v
目錄
論文審定書 ... i 摘要 ... ii ABSTRACT ... iii 誌謝 ... iv 目錄 ... v 圖目錄 ... vii 表圖錄 ... ix 第一章 研究背景 ... 1 第二章 光纖光柵原理 ... 3 1. 光纖光柵 ... 3 2. 布拉格光纖光柵製作 ... 5 (1) 相位光罩法 ... 5 (2) 布拉格光纖光柵製作 ... 6 第三章 實驗架構 ... 16 1. 光纖光柵直流電壓感測系統 ... 16 2. 光纖光柵交流電壓感測系統 ... 18 3. 光纖光柵電壓傳感器的構造 ... 19 4. Labview 軟體簡介 ... 20 5. 實驗儀器 ... 21 第四章 實驗結果 ... 23 1. 直流電壓感測 ... 23 2. 交流電壓感測 ... 25(1) 簡諧振盪(SHM,simple harmonic oscillation) ... 25
vi (3) 驅駛振動原理(driven osillator) ... 28 (4) 改變光纖光柵及驅駛振盪的起始位置 ... 30 (5) 質量對光柵感測器驅駛振盪影響 ... 34 (6) 光纖光柵傳感器之彈性係數量測 ... 36 (7) 實驗數據理論模擬分析 ... 37 第五章 結論 ... 39 參考文獻 ... 40
vii
圖目錄
圖 2-1-1:光繞射示意圖 ... 3 圖 2-1-2:短週期光纖光柵繞射示意圖 ... 5 圖 2-2-1:相位光罩法示意圖...6 圖 2-2-2:布拉格光纖光柵製作系統架構示意圖...7 圖 2-2-3:EDFA 頻譜圖...8 圖 2-5-4:布拉格光纖光柵反射頻譜圖...9 圖 2-2-5:布拉格光纖光柵反射頻譜圖...9 圖 2-5-6:布拉格光纖光柵製作系統架設...9 圖 2-2-7:EDFA 及 OSA...10 圖 2-2-8:相位光罩...10 圖 2-2-9:布拉格光纖光柵反射頻譜圖...13 圖 2-2-10:布拉格光纖光柵反射頻譜圖...13 圖 2-2-11:布拉格光纖光柵反射頻譜圖...15 圖 2-2-12:布拉格光纖光柵反射頻譜圖...15 圖 3-1-1 :光纖光柵直流電壓感測系統...16 圖 3-1-2 光纖光柵訊號解調之波長即時感測模式...17 圖 3-2-1 :光纖光柵交流電壓感測系統...18 圖 3-2-1 :傳感器構造...19 圖 3-2-2 :光纖光柵傳感器完成圖...19 圖 3-4-1 :光纖光柵解調儀...21 圖 3-4-2 :壓電控制器...21viii 圖 3-4-3 :三軸精密平台...21 圖 3-4-4:壓電式軸向控制器...21 圖 3-4-5:交流電變壓器...21 圖 3-4-6:自製直流電感測平台...22 圖 3-4-7:自製交流電感測平台...22 圖 3-4-8:1554nm 光纖光柵...22 圖 3-4-9:光纖光柵固定座...22 圖 3-4-10:光纖光柵承載座...22 圖 3-4-11:交流電磁閥開關...22 圖 4-1-1: 波長與直流電壓關係圖...24 圖 4-2-2-1:阻尼振盪的三個解...26 圖 4-3-2-1:頻域分析模式...29 圖 4-3-2-2:頻域分析模式...29 圖 4-2-4-1 起始波長位置示意圖...30 圖 4-2-4-2~5: 改變光纖光柵及驅駛振盪的起始位置...31 圖 4-2-4-6~9: 改變光纖光柵及驅駛振盪的起始位置...32 圖 4-2-4-1-1: 電壓對振幅的關係...33 圖 4-2-5-1~5:改變質量之電壓振幅關係圖...34 圖 4-2-5-6:質量與振幅之關係圖...35 圖 4-2-6-1:量測傳感器彈性係數模型...36 圖 4-2-6-2:傳感器加質量與移動距離關係...37 圖 4-2-7-1:質量-振幅值漸進式線...38
ix
表圖錄
表 2-2-3-1: 相位光罩 A 之參數...11 表 2-2-3-2: 相位光罩 B 之參數...12 表 2-2-3-3: 掺鍺高感光性光纖參數...13 表 2-2-3-4: 為高壓載氫光纖之參數...141
第一章研究背景
於西元 1978 年,在加拿大通訊研究中心(Canada Research Centre, CRC)的 K. O. Hill 與研究夥伴在接錯的光纖中,無意發現了光子誘導光柵。K. O. Hill 的光纖是使用 488nm 的可見光波長的氬離子激光器,照射到光纖纖蕊上,經 過增加和延長光照時間後,讓光纖纖核中形成光柵 [1]。在西元 1989 年時, 於美國康乃狄克州,Glenn、 Meltz 與 Morey 採用兩道波長為 244nm 高強度 的紫外光於光纖的照射區上產生干涉條紋,製作一布拉格光柵長度為一公分 [2]。這種由光纖側面照射紫外光的方式比在 1978 年時 K.O.Hill 所使用的方法 更為快速且簡單。西元 1993 年,K. O. Hill 與研究夥伴提出相位光罩法。是利 用相位光罩(Phase mask)製造特性相近的光纖光柵,代表著光纖光柵已是可以 大量製造的,而光柵也就已經具備光纖本身的優點了 [3]。 傳統的布拉格光纖光柵感測其中心反射能量在於輸入能量強度和布拉格 光纖光柵本身的波長反射強度能量,會因距離而有所限制,如果用於環境的監 控時,可能需要更長更遠的距離的來監測,效能與預期的有所落差。 在發展出光纖光柵環型雷射訊號解調系統,在系統裡由於加入了摻鉺光 纖,而且居量反轉的放大效果,對於從布拉格光纖光柵反射端所反射回來的測 量訊號也隨之放大,改善了傳統方式的布拉格光纖光柵傳輸距離較短的缺點。 光纖感測器技術在近年來已高度被受到矚目,從一開始主要使用在石油 化工、軍事、航太、航海,至今以擴展到醫療器材以及智慧型土木結構感測系 統上 [4]。在土木環境的結構感測系統方面,研究發現我們可以使用光纖感測 器來監測結構體的目前結構受到外力影響的狀態,例如:管路、隧道、水壩、 橋樑和摩天大樓結構。 電子式感測系統佈線成本高及不同感測元件間各自電器規格不相容,在 整合智慧型感測網有困難,由於光纖具有高頻寬、低損失、不受電磁干擾、重
2 量輕、體積小、價格低廉等優點,因此可以取代電子式感測系統佈線是智慧感 測網理想的傳輸介質。 光纖光柵感測器利用光的反射波長來達到理想溫度、振動的感測,目前比 較常用的是溫度與應變感測元件,為了因應家庭安全監測的目標需要開發電 源設備的感測元件。 近幾年來隨著物聯網(IoT)的技術拓展,在技術層面上已拓展至各個領域 面向,其中以家庭最貼近的智慧生活,如家庭自動化控制、居家保全與監控和 居家照護、智慧能源管理監控等應用也成為近年來智慧家庭發展的重點。 本論文就是針對智慧家庭裡的監控系統中的交流電壓感測器做研究並 建立感測器模型,目前光纖光柵感測器在溫度與應變之感測已有很多研究,然 而在電源感測這一方面比較少,因此本論文主要利用光纖光柵感測的高敏感 度製作光纖光柵電壓感測器。
3
第二章光纖光柵原理
1. 光纖光柵
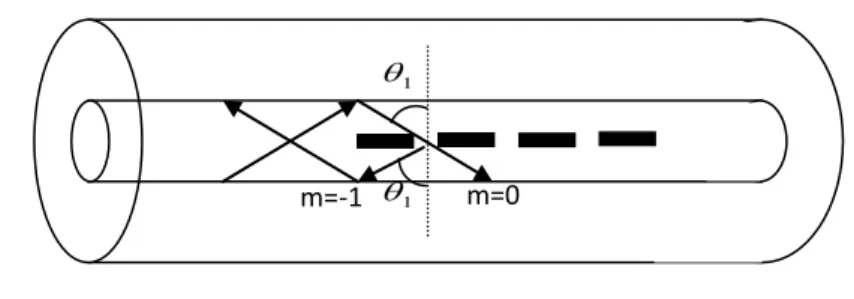
[5] 圖 2-1-1:光繞射示意圖 如圖 2-1 所示,光由入射端進入,入射角為 θ1。經過狹縫的繞射後 所產生的 m 為 0 階、±1 階、±2 階…等之繞射光。θ2為-1 階繞射之繞 射角;Λ 為光柵每個週期間隔長度寬度。光在光纖之中模態傳遞常數為 β,由式(1)表示。 β =2π𝑛𝑒𝑓𝑓 λ = 2π𝑛𝑐𝑜𝑟𝑒sin 𝜃1 λ (1) 等效折射率:neff 核心折射率:ncore 光波波長:λ 由司乃耳定律(Snell's Law)得式(2) 𝑛𝑐𝑜𝑟𝑒sin θ2 = 𝑛𝑐𝑜𝑟𝑒sin θ1+ mλ Λ (2) 兩邊同乘2π/λ 得式(3) β2 = β2+2πm Λ (3)4 當 m=0,0 階繞射,表示光源直接進入;m=-1,-1 階繞射,令 m=-1 代入式(3)則 β2 = β1− 2π Λ (4) 式(4)表示光在光纖裡進行 β1的傳播模態,受到光柵的擾動2π/λ 後,產生傳播模態β2的繞射,對布拉格光柵,以-1 階繞射光公式推 導。 週期性的光柵間隔(Λ)其長度與波長長度接近。布拉格光纖光柵的 偏移量比2π/λ 大,因此會使得入射光造成反射的效果,所以我們又稱為 反射式光纖光柵。將 m=-1 代入式(2),我們可以得到下面的式(5): 𝑛𝑐𝑜𝑟𝑒sin θ2 = 𝑛𝑐𝑜𝑟𝑒sin θ1− λ Λ (5) 由式(1)模態常數的定義,我們得到下面的式(6): 𝑛𝑒𝑓𝑓2 = 𝑛𝑒𝑓𝑓1− λ Λ (6) 則 λ=(neff1+neff2)Λ (7) 光幾乎是把正向所傳遞的光 couple 給反方向同模態的光,我們可 以得到布拉格波長為式(8): λBragg=2neff1Λ (8) 其中兩倍的光柵間隔寬度Λ 等於光罩光柵波長 λgrating,將上式(8) 改寫成下式(9)。 λBragg=2neffΛ (9)
5
下圖為光纖光柵繞射情形。
圖 2-1-2:短週期光纖光柵繞射示意圖
因此光纖光柵週期滿足布拉格波長條件,就會有強布拉格反射又稱 布拉格光纖光柵(Fiber Bragg Granting)。
2. 布拉格光纖光柵製作
布拉格光纖光柵的製作方法主要可分為全像干涉法(holography method)和相位光罩法(phase mask method)。由於相位光罩法可以大批 量的製作出我們所需要的布拉格光纖光柵。所以在本論文中,所使用的 布拉格光纖光柵為相位光罩法製作而成。
(1) 相位光罩法
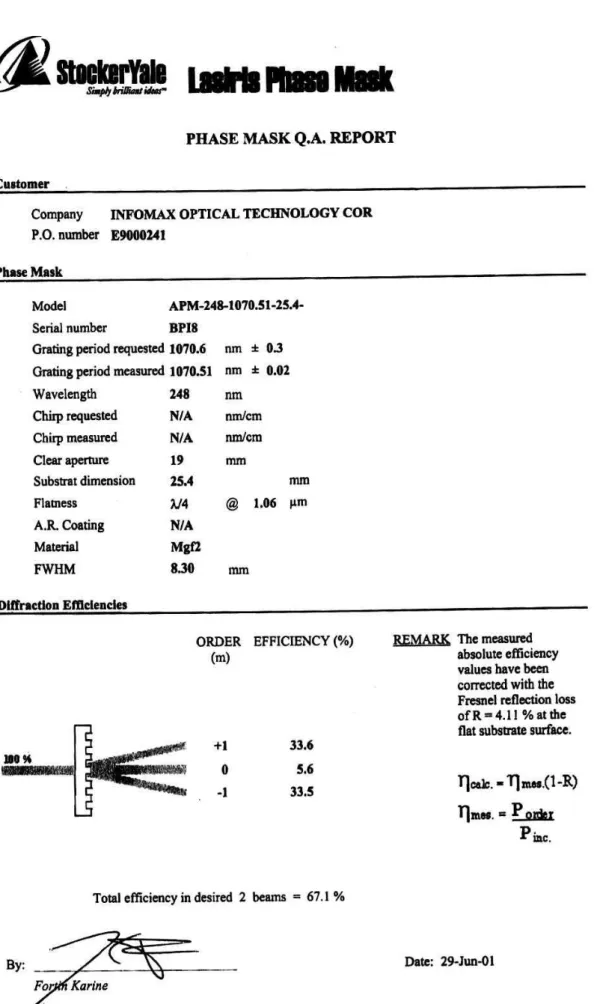
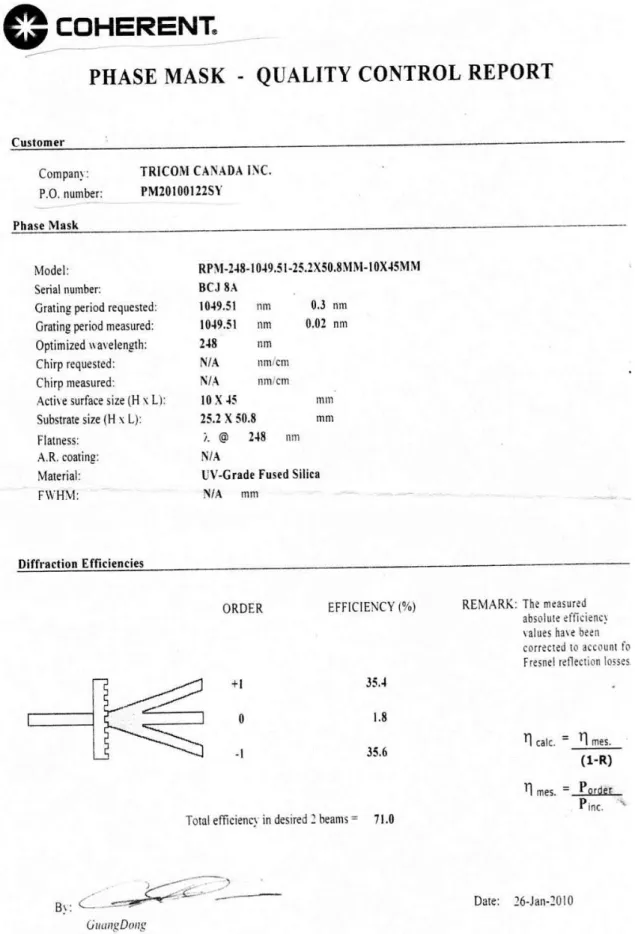
將所需的數位式圖案蝕刻在石英玻璃基板上,製作成具有產生 繞射功能的相位光罩(phase mask),接著用紫外光照射光罩,產生 1 階繞射光,±2 階繞射光,當繞射光互相干涉時,便會形成明暗相 間條紋來曝照在光纖上,製作成布拉格光纖光柵。因為相位光罩法 不易受到環境震動的影響,對光的同調性要求也沒那麼高,所以目 前被普遍使用。如圖 2-2-1 所示: 1 1 m=0 m=-16 圖 2-2-1 相位光罩法示意圖
(2) 布拉格光纖光柵製作
本論文中採用相位光罩法製作布拉格光纖光柵,圖 3-7 為相位 光罩法實驗架構示意圖。所使用儀器有: (1)準分子雷射 (2)光圈 (3)聚焦鏡 (4)光罩 (5)光罩載台 (6)光纖 (載氫光纖或感光性光纖) (7)掺鉺光纖放大器(EDFA) (8)光譜分析 儀(OSA)。 實驗中使用 48nm(KrF)準分子雷射對掺鍺高感光性光纖或高壓 載氫光纖進行曝光,使得感光性光纖或載氫光纖內的纖核折射率產 生改變,形成具有布拉格光纖光柵的結構。 248nm(KrF)準分子雷射發出紫外光以後,先經過光圈及聚焦鏡 的聚焦成為線型光,當光進入相位光罩後,會產生繞射的現象,在 光纖上形成亮暗間距的雷射強度分布,進而改變光纖中纖核層的折 射率,折射率具有週期性變化。7 圖 2-2-2 布拉格光纖光柵製作系統架構示意圖 布拉格光纖光柵的製作過程:開啟準分子雷射,測量雷射能量的 強度,如果準分子雷射能量強度過強將會造成相位光罩的毀損,能 量強度太弱則會影響布拉格光纖光柵的製作與製程時間,接著調整 雷射光聚焦位置到光纖載具上的光纖完成聚焦。然後在光罩載台上 放入相位光罩後置於光纖載具前。把光纖的披覆層(package )剝 除,在將光纖至於光纖載台上並使用酒精棉片去擦拭,確切的把光 纖擦拭乾淨,否則在曝光過程中殘渣會損害相位光罩。然後調整光 纖載台使相位光罩與光纖之間沒有空隙。實際聚焦的位置大概在光 罩跟光纖之後,要是聚焦在光罩上,會因為能量太強而造成光罩上 結構的破壞,由於光纖為裸光纖,聚焦能量如果過強的話會可能造 成光纖的斷裂。
8
在光纖另一端,會接上光纖偶合器(Coupler)來連接 EDFA 與 OSA 便於觀察光纖光柵的形成,Coupler 一端注入 EDFA 的光源,在 另一端接上 OSA,Coupler 單端接上製作成布拉格光纖光柵的光纖, 將 EDFA 光源開啟後,可以於 OSA 觀測到 EDFA 頻譜圖。如圖 2-2-3 所示。
圖 2-2-3 EDFA 頻譜圖 接著打開準分子雷射遮罩,在經過數分鐘的曝光後,在 OSA 的 觀察可以看到反射波長能量漸漸的穩定,此時布拉格光纖光柵結構 已經趨於飽和,如果繼續曝光的話會破壞布拉格光纖光柵結構。製 作布拉格光纖光柵反射頻譜如圖 2-2-4 及圖 2-2-5 所示,圖 2-2-4 為使用相位光罩 A(反射中心波長 1556nm ),圖 2-2-5 為使用相位 光罩 B(反射中心波長 1549nm )。
9
圖 2-5-4 布拉格光纖光柵反射頻譜圖(反射中心波長 1556nm )
圖 2-2-5 布拉格光纖光柵反射頻譜圖(反射中心波長 1549nm )
布拉格光纖光柵製作系統架設圖:
10
圖 2-2-7 EDFA 及 OSA 圖 2-2-8 (左上)相位光罩 B(左下)光罩 載台 B(右上)光罩 A(右下) 載台 A
11
12
13 表 2-2-3-1 為掺鍺高感光性光纖之參數,圖 2-2-10、圖 22-11 為使用摻鍺高 感光性光纖製作而成的布拉格光纖光柵反射頻譜圖: 表 2-2-2-3 掺鍺高感光性光纖參數 圖 2-2-9 布拉格光纖光柵反射頻譜圖 圖 2-2-10 布拉格光纖光柵反射頻譜圖 圖 2-2-9 所示,此為使用相位光罩 A 所製作的布拉格光纖光柵,其中心反射 波長 1556nm ,中心反射波長強度-34.47dBm。 圖 2-2-10 所示,此為使用相位光罩 B 所製作的布拉格光纖光柵,其反射中 心波長 1549nm ,中心反射波長強度-34.12dBm。
14
表 2-2-2-4 為高壓載氫光纖之參數
15 圖 2-2-11 布拉格光纖光柵反射頻譜圖 圖 2-2-11 所示,此為使用相位光罩 A 所製作的布拉格光纖光柵,其中心反 射波長 1556nm ,中心反射波長強度為-44.94dBm。 圖 2-2-12 布拉格光纖光柵反射頻譜圖 圖 2-2-12 所示,此為使用相位光罩 A 所製作的布拉格光纖光柵,其中心反 射波長 1556nm ,中心反射波長強度為-42.03dBm。
16
第三章實驗架構
1. 光纖光柵直流電壓感測系統
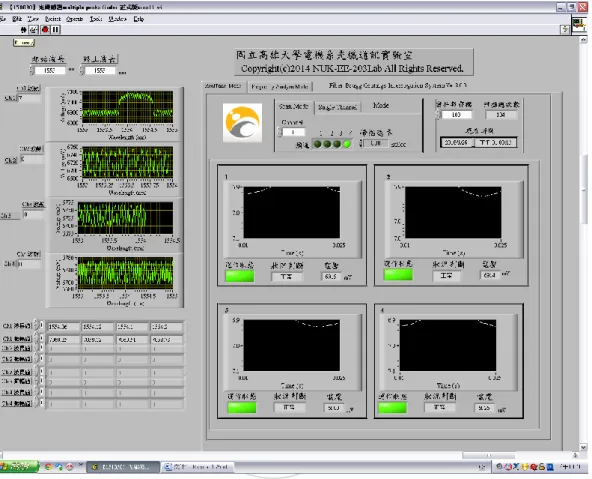
光纖光柵電壓感測系統主要由,EDFA(摻鉺光纖放大器)、 Tunable Filter(可調波長濾波器)、Coupler(光纖偶合器)、FBG (布拉格光纖光柵)、Isolator(光隔離器)等光電元件加上不同性質的 電壓所建立的硬體模型所組成。如下圖(3-1-1)和圖(3-2-1)。 光束從 EDFA 輸出後經過一光隔離器後,再經過光纖偶合器A,布 拉格光纖光柵的反射光90%經過光纖耦合器B有80%的光回到光纖 迴圈裡,形成一個環型共振腔,利用可調波長濾波器固定環型雷射的波 長,B coupler 的20%的光會進到光訊號轉換器後通過 NI 的介面卡 將訊號數位化再把訊號傳至電腦記錄分析,透過 Labview 軟體運算得到 光纖光柵反射波長的位移。 直流電壓感測架構,如圖(3-1-1)可程式控制電源(MDT-694A) 來控制壓電式的軸向移動平台,待測直流電壓( 0~150V)經一電 壓匹配器輸入到可程式控制電源(THORLABS MDT-694A),再輸入適當 的電壓於壓電式移動平台,光纖光柵受到壓電移動平台的拉伸產生布拉 格反射波長之位移,經光纖光柵信號解調系統測得波長的位移量。 圖 3-1-1:光纖光柵直流電壓感測系統17
依照我們所建立的直流電壓感測器的架構(圖 3-1-1),利用光纖光 柵解調系統的波長即時感測模式中所測量到的光纖光柵波長位移量。如 (圖 3-1-2)所示;
18
2. 光纖光柵交流電壓感測系統
至於交流電源的感測器架構,如圖(3-2-1)是將待測交流電壓 (80~110V)經變壓器(Tramsfomer)輸出至 1.42KΩ 的水泥電 阻降壓至(23~30V)驅動一磁簧振盪器,光纖光柵固定於傳感器 上,傳感器受到磁簧振盪器產生驅駛振盪,光纖光柵的振動信號借由光 纖信號解調儀量得頻率響應而得到輸入交流電壓值。 圖 3-2-1:光纖光柵交流電壓感測系統19
3. 光纖光柵電壓傳感器的構造
[12] 圖 3-3-1:光纖光柵傳感器四個主體 光纖光柵傳感器構造,如圖(3-3-1),下層墊片組裝完成,如下 圖(3-3-2)所示。在設計時下層墊片預留了四個螺絲孔,主要是能將 感測器任意的固定在需要量測的物體上,並且達到隨時可拆裝之功用。 而兩組相對之菱形結構是經過 SAP2000 模擬,設計出量測物之頻率所需 範圖,並能夠將振動源準確的傳達至光纖光柵上及保護光纖光柵不易受 到損壞。 圖 3-3-2:光纖光柵傳感器完成圖20
4. Labview
軟體簡介
[13] LabView提供很多外觀件與傳統儀器(如示波器、萬用表)類似的 控制項,讓使用者能更方便地創建介面。使用者介面在 LabVIEW中被稱 為前面板。使用圖示和連線,在此面板中,主要是讓使用者來設定輸入 端的數值,另一方面也提供輸出及輸入物件的選擇,猶如像真實儀表ㄧ 樣之控制面板,包含了控制端及顯示端;中為程式方塊流程圖的架構, 也就是程式主要部份,而這些圖形化程式再藉由圖像連接器的功能,將 每個圖形程式用線段相連接來達到資料傳輸的目的。LabVIEW集成了與 滿足 GPIB、VXI、RS-232和 RS-485 協定的硬體及資料獲取卡通訊的全 部功能。21
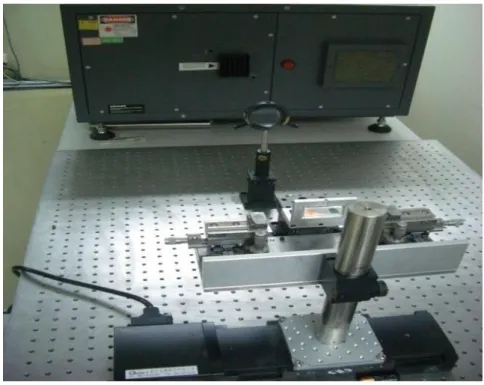
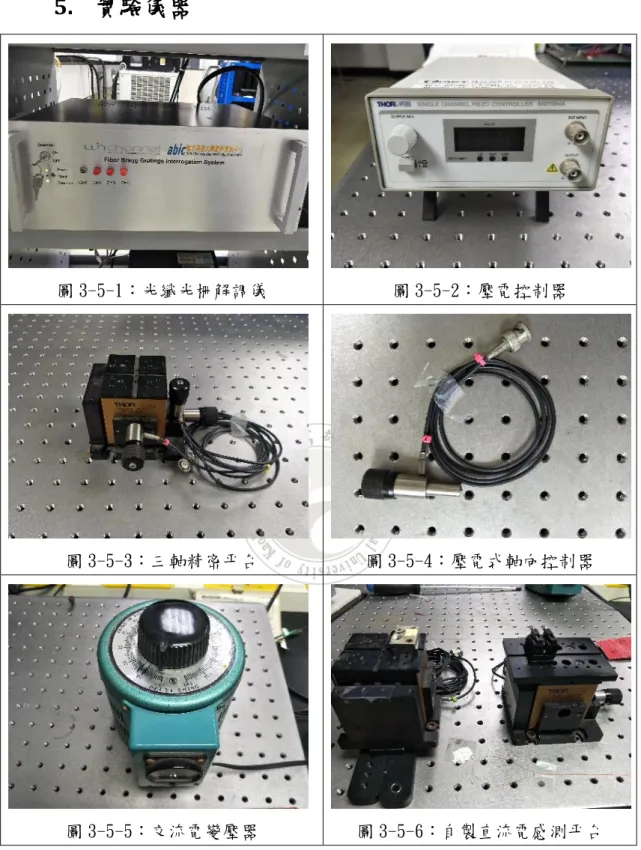
5. 實驗儀器
圖 3-5-1:光纖光柵解調儀 圖 3-5-2:壓電控制器
圖 3-5-3:三軸精密平台 圖 3-5-4:壓電式軸向控制器
22
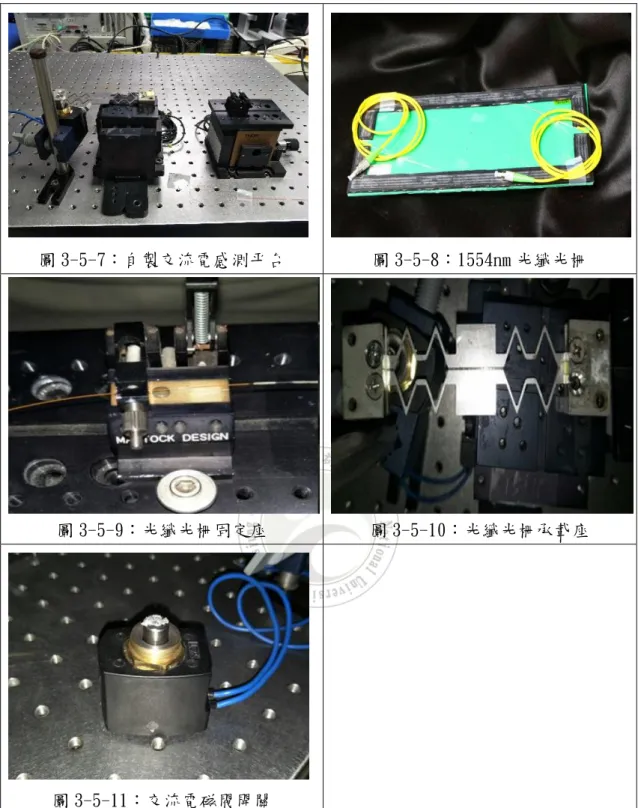
圖 3-5-7:自製交流電感測平台 圖 3-5-8:1554nm 光纖光柵
圖 3-5-9:光纖光柵固定座 圖 3-5-10:光纖光柵承載座
23
第四章實驗結果
1. 直流電壓感測[6]
當布拉格光纖光柵受到外在環境溫度改變或外部應力改變時,會讓 光柵產生形變,造成光的反射波長有所變化,藉由測量此波長位移量來 建構感測系統。如圖所示。 以下以應變和溫度做為推導。和所受的應變及溫度變化關係如式(10) 表示: ΔλFB = 2nΛ {1 − (neff 2 2 ) [P12+ υ(P12− P11)]} ε + (α dneff neffdT) ΔT (10) 布拉格光纖光柵反射波長的飄量:
B 光纖的應變張力:P11、P12 光纖的波松比(Possion’s ratio) :υ 所受的應變:ε 光纖的膨脹系數:α 外在溫度改變量:ΔT 我們可以式(10)作簡化,可表示: ΔλB λB = (1 − Pe)ε + (α + ξ)ΔT = Kεε + KTT (11) 光纖的光彈係數(potoelastic constant):Pe=(n2eff/2)[P12+υ(P12-P11)]光纖的熱光係數(thermal optical cofficient):ξ=dn2
eff/neffdT 外在應變作用的敏感係數:Kε 外在溫度改變作用的敏感係數:KT 由式(11)我們得知當改變布拉格光纖光柵受到外在應力作用及外在 溫度改變時會使布拉格光纖光柵的中心反射波長會有飄移量,所以我們 可以利用此飄移量的大小測量外在所受應力作用量或外在溫度改變量。
24 以下我們討論有關外在應力作用下布拉格光纖光柵中心反射波長的位移 量,也就是我們假設在恆溫下(ΔT=0),我們修正式(1),如下式表示: ΔλB λB = (1 − Pe)ε = Kεε (12) 光彈常數( Photoelastic Constant):
12
11 12
2 2 P v P P n P e e 當光纖受到外力拉扯的影響時,會產生形變,因此造成光纖光柵中 的折射率產生變化,使得中心波長產生飄移。 當壓電元件受到直流電壓長度會伸長/縮小,光柵的週期也會受 壓電元件的拉伸影響,造成光纖光柵的週期改變,借由光纖光柵訊號解 調儀系統來掃瞄其光纖光柵波長。下圖(4-1-1)是改變電壓對光纖光柵 所做的關係圖: -10 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 1563.8 1563.9 1564.0 1564.1 波長 (n .m. ) 電壓 第一趟 第二趟 第三趟 第四趟 圖 4-1-1 波長與直流電壓關係圖25 由圖 4-1-1 我們可以觀察到以光纖光柵直流電壓感測模型所得到 的實據結果可發現,當電壓從 0 伏到 150 伏特往返四趟所得的數據是滿 穩定也很線性,因此我們可以借由波長的變化能得知目前的電壓值。
2. 交流電壓感測
(1) 簡諧振盪(SHM,simple harmonic oscillation)
[8]是一種週而復始的線性折返運動,也是最基本最簡單的機械振 動。當某物體進行簡諧運動時,物體所受的力跟位移成正比,且所受 的力總是指向平衡位置,表示如下式(13) F=− kx (13) 按照牛頓的第二定律,其運動方程式如下式(14)表示 F=m𝑑𝑥dt22=− 𝑘𝑥 (14) 令𝑘 𝑚= 𝜔0 2,可得到以下式(15) 𝑑2𝑥 𝑑𝑡2 + 𝜔02 = 0 (15) 把式子整理為式(16)表示 x = 𝑥0cos(𝜔0𝑡 + 𝛿) (16) 𝑥0和𝛿是由起始的條件所決定的常數項,週期為T = 2𝜋 𝜔⁄ 。 0
(2) 阻尼振盪(damped oscillation)
[9] 在實際的振盪系統中,因存在著摩擦力、空氣阻力等常有著耗散 的現象,系統中的振盪力會隨著時間的變化而減小,這一類的系統我 們稱之為阻尼振盪。較常見到的最簡單的狀況為阻尼力與運動動速成26 正比,而阻尼力方向與速度方向成反比。恢復力為−kx,加上阻尼力 為R= −cv,由牛頓運動定律可以得到式(17)如下 ΣF = −kx − cv = ma => −𝑘𝑥 − 𝑐𝑑𝑥𝑑𝑡 = 𝑚𝑑𝑑𝑡2𝑥2 (18) 將式(18)整理一下可得到式(19) 𝑑2𝑥 𝑑𝑡2 + 2𝛾 𝑑𝑥 𝑑𝑡+ 𝜔0 2𝑥 = 0 (19) 其中2γ = 𝑚𝑐、𝜔02 = 𝑘 𝑚,皆為正數。要解此類型的微分方程式 時, 我們可以令解為x(t) = Aeλt,過阻尼情況的程式的兩個解以下式 (20)表示: λ1,2 = −γ−+√γ2− ω 0 2 (20) 微分方程式的解可以以下式(21)表示 x(t) = A1eλ1t+ A2eλ2t (21) 其中的A1與A2是可以由起始條件而來改變。振幅會隨著時間的變化我 們以下圖(4-2-2-1)的 a 線條來看 圖 4-2-2-1:阻尼振盪的三個解
27 另一種情況為臨界阻尼的狀況下γ2=ω 0 2 時,此情況的方程式的兩解 為相等λ1=λ2 = −γ,振幅可寫為式(22) x=Ae−γt (22) 振幅會隨著時間而衰減圖(4-2-2-1)b 線條。 另一種情況為欠阻尼的狀況的狀況下γ2<ω 0 2 下,方程式的解為共軛 複數,其振幅可以以式(23)表示 x = e−γt(C1eiωt́ + C2e−i ώt) (23) 其中ώ =√ω02− γ2,令x為實數,故C 1和C2必為共軛複數,最後 解可以以下式(24)表示 x=A0e−γtcos (ώt + θ) (24) A0與 θ隨著起始的條件決定,在欠阻尼的狀況下,振子的振幅隨著時 間呈指數衰減如圖(4-2-2-1)的 c 線條。
28
(3) 驅駛振動原理(driven osillator)
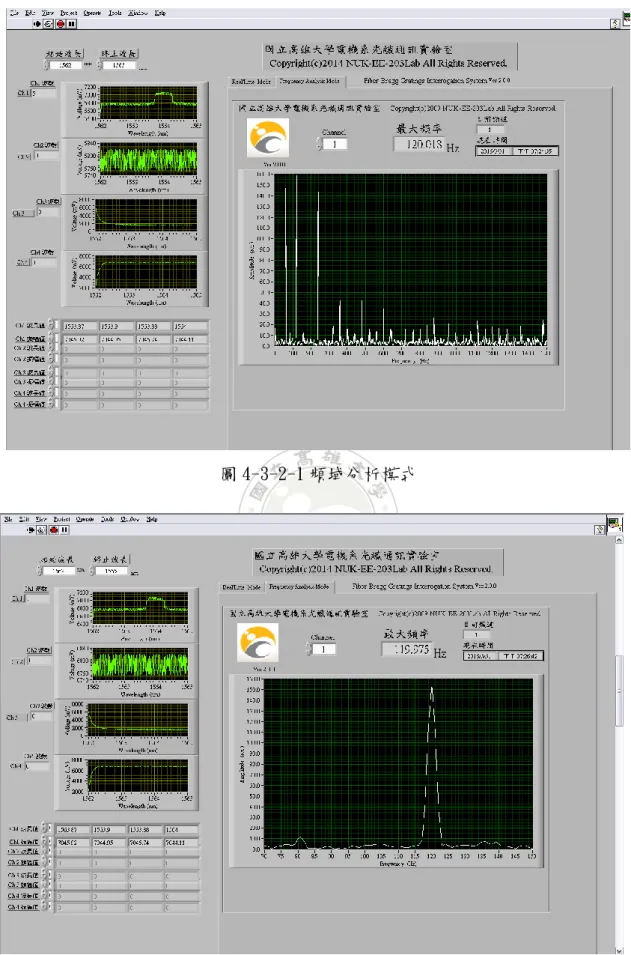
[10] 當一阻尼振盪子受到一週期函數形式的外力驅動,如F = F0cosωt 時的情況,其中的ω為外力週期之角頻率,而F0為常數。所以驅駛振 盪的運動方程式可以寫成下(25)表示: x(t) = Ahe −γt sin(ώt + φh) + Acos(ωt − φ) (25) 實驗時我們發現在是穩定態的解,也就是不隨時間衰減的解。這裡穩 定狀態的解也與系統的起始條件無關。[11]其中φ=tan−1[ cω k−mω2],為 振幅與驅動訊號間的相位差。振幅的穩定狀態解為x = Acos(ωt + φ),其中振幅以下式(26)表示: A= F0⁄m √(ω02 −ω2)2+4( 𝑐 2𝑚) 2 ω2 (26) 方便計算我們把式子(26)同乘上m,其式子為式(27)表示: A= F0 𝑚√(𝑚𝑘−ω2)2+4(𝑐 2𝑚) 2 ω2 (27) 振幅:A 自然頻率:ω0 = √𝑘 𝑚⁄ 質量: m 阻尼係數:c 依照我們所建立的交流電壓感測器的模型下,利用光纖光柵訊號解調儀 系統裡頻域分析模式中所測量到,在實驗中由交流驅動器所產生的基頻 60 赫 茲(HZ)外,因為交流電質量的關係所產生出來的諧頻[14],如二倍頻 120HZ、三倍頻 180HZ 等,我們發現它的二倍頻 120HZ 也是相當的穩定、雜訊 低、振幅響應也比其它頻率的響應來的大。如下圖 4-2-3-1、4-2-3-2 所示; 以下二張圖為此系統畫面,該畫面主要是用來量測頻率的振幅響應值。29
圖 4-3-2-1 頻域分析模式
30 所以我們選擇以 120HZ 的振幅響應強度來做數據的量測的基準點,主要 是我們將交流電輸入到系統後,觀察除交流電的基頻外它的二倍頻 120HZ 的 振幅響應強度也很大又穩定且與交流電 60HZ 互相沒有干擾疑慮。我們先用所 建立的交流電感測模型測得的數據,數據將以軟體 OriginPro 9.0 以圖型的 方式來呈現。以下的圖示是依照光纖光柵交流電壓感系統架構(圖 3-2-1) 下,改變不同的參數後電壓以來回(80V~110V)四次的量測,試看能不能得 到一個比較線性又穩定的數據;並在驅駛振動的公式裡也發現質量(m)與 振幅也有其關係,所以我們也將在交流電壓傳感器的驅駛振動機構端加上m 1、m2....等來觀察其振幅響應對質量的關係,如果未來機傳感器上的某 一機構有做調整,也可以有參數值能做對應。以下為改變不同參數所測得的 數據。
(4) 改變光纖光柵及驅駛振盪的起始位置
交流電壓傳感器是將光纖光柵固定於一磁簧振盪器,磁簧振盪器 受到外加交流電壓驅動而產生光柵的布拉格反射波長位移的週期變 化,再利用光纖光柵信號解調系統將光柵反射波長的變化轉換成環形 光纖雷射光強度變化,而其光強度會隨著光纖光柵起始的波長,以及 磁簧震盪器的震盪特性參數如彈力常數、質量、起始的相位有關,以 下的實驗主要是借由改變振盪器的起始位置及波長位置改變時,電壓 增加與輸出的振幅響應是否可以達到線性、穩定振幅響應高的數據。 圖 4-2-4-1 起始波長位置示意圖 1563.8 1563.9 1564.0 1564.1 1564.2 6700 6800 6900 7000 7100 Vlotag e( mV) 波長 Vlotage(mV) A B C D31 實驗中調整磁簧振盪器軸柱與光纖光柵傳感器的間距從起始點的 高度移動-0.1mm 後,再將光纖光柵的起始位置如圖 4-2-4-1 從A點到 D點,改變電壓來觀察其振幅值做往返四趟所測得的數據如下: 80 85 90 95 100 105 110 3.0 3.5 4.0 4.5 5.0 第一趟 第二趟 第三趟 第四趟 振幅 電壓 80 85 90 95 100 105 110 80 85 90 95 100 105 110 115 120 125 130 135 140 145 150 155 160 165 第一趟 第二趟 第三趟 第四趟 振幅 電壓 圖 4-2-4-2A點 圖 4-2-4-3B點 80 85 90 95 100 105 110 10 12 14 16 18 第一趟 第二趟 第三趟 第四趟 振幅 電壓 80 85 90 95 100 105 110 2.0 2.2 2.4 2.6 2.8 振幅 電壓 第一趟 第二趟 第三趟 第四趟 圖 4-2-4-4C點 圖 4-2-4-5D點 如上步驟,當光纖光柵系統模型的驅駛振盪器,從起始點的高度 移動-0.2mm 後,再將光纖光柵改變起始位置從A點到D點時,再來改變 電壓來觀察其振幅值做往返四趟所測得的數據如下:
32 80 85 90 95 100 105 110 3 4 5 6 第一趟 第二趟 第三趟 第四趟 振幅 電壓 80 85 90 95 100 105 110 75 80 85 90 95 100 105 110 115 第一趟 第二趟 第三趟 第四趟 振幅 電壓 圖 4-2-4-6A點 圖 4-2-4-7B點 80 85 90 95 100 105 110 35 40 45 50 55 60 65 70 75 80 第一趟 第二趟 第三趟 第四趟 振幅 電壓 80 85 90 95 100 105 110 3.5 4.0 4.5 5.0 5.5 6.0 第一趟 第二趟 第三趟 第四趟 振幅 1 電壓 圖 4-2-4-8C點 圖 4-2-4-9D點
1.
數劇分析
以上所列出的數據圖是由改變振盪器的起始位置,及改變光柵的 波長所量測到的電壓增加振幅響應的關係圖;由關係圖中可以發現當波 長由A點至D點量測時所得到的振幅響應會有所不同,是由於A點為最 高點所以振幅比較小,在B點時斜率相對比較大所以輸出的振幅響應值 會比較大,C點及D點振幅響應就有變小的趨勢;由圖中可發現當振盪 器從原本高度移動-0.2mm 且波長起始位置在B點時所量測得到的數據是 比較線性比較穩定,所以我們推測傳感器的自然振盪頻率與驅動器的振 盪頻率接近或者穩合,所以可以完全被驅動器所控制,也如在振動原理 裡的穩定態所說明,加上驅駛振盪器後,振幅不會因時間而衰減。33 因此我們選擇了圖 4-2-4-3 的B點,在光纖光柵傳感器還未加上其它 質量時,圖 4-2-4-3 所測得的往返四趟的平均值所做的振幅對電壓的關 係圖。如下圖 4-2-4-1-1 所示: 80 85 90 95 100 105 110 80 85 90 95 100 105 110 振幅 電壓ACV 振幅 圖 4-2-4-1-1 電壓對振幅的關係 由此實驗數據所呈現,當交流電壓為 80 伏特時量測到的振幅也落 在約莫 80 ,電壓每上升 5 伏特振幅也等比例的上升,外加電壓與傳感 器振幅呈正比關係,與前面驅使振盪數學模型(式 26),傳感器振幅與驅 使力的振幅成正比的關係符合。
34
(5) 質量對光柵感測器驅駛振盪影響
在驅駛振盪的數學模型(式 26)我們可以得知質量的改變會影響 輸出的振幅值,我們將以上圖 4-2-4-22,所量測的的數據做加質量的實 驗;在傳感器的驅駛振動器那一端陸續加上質量,以下是質量固定改變 電壓往返四次所量測到的數據以下圖 4-2-5-1~圖 4-2-5-5 所示: 圖 4-2-5-1 mi+0.00196KG 圖 4-2-5-2 mi+0.00385KG 圖 4-2-5-3 mi+0.00579KG 圖 4-2-5-4 mi+0.00773KG 圖 4-2-5-5 mi+0.00965KG 圖 4-2-5-5 mi+0.01155KG 80 85 90 95 100 105 110 50 55 60 65 70 75 80 85 90 95 振幅 電壓 第一趟 第二趟 第三趟 第四趟 80 85 90 95 100 105 110 55 60 65 70 75 80 85 90 95 100 振幅 電壓 第一趟 第二趟 第三趟 第四趟 80 85 90 95 100 105 110 40 45 50 55 60 65 70 75 80 85 90 振幅 電壓 第一趟 第二趟 第三趟 第四趟 80 85 90 95 100 105 110 42 44 46 48 50 52 54 56 58 60 62 64 66 68 振幅 電壓 第一趟 第二趟 第三趟 第四趟 80 85 90 95 100 105 110 38 40 42 44 46 48 50 52 54 56 58 60 62 64 66 振幅 電壓 第一趟 第二趟 第三趟 第四趟 80 85 90 95 100 105 110 35 40 45 50 振幅 電壓 第一趟 第二趟 第三趟 第四趟35 從以上的數據是每當加一質量後往返四趟改變壓所測得的電壓與 振幅的關係圖,每在傳感器加一質量時,振幅也有變小的趨勢,在以上 的實驗數據裡我們發現質量改變時,電壓在100V時的振幅還滿穩定 的,圖 4-2-5-6 為電壓100V時質量與振幅響應的關係。 -0.0025 0.0000 0.0025 0.0050 0.0075 0.0100 0.0125 50 55 60 65 70 75 80 85 90 95 100 105 振幅 質量(kg) 電壓AC100V固定改變質量之振幅響應值 圖 4-2-5-6 質量與振幅關係圖 為了估算光纖光柵傳感器的自然頻率需要一些重要的參數,其中 一項為彈力常數K值,以下我們說明K值的實驗量測。
36
(6) 光纖光柵傳感器之彈性係數量測
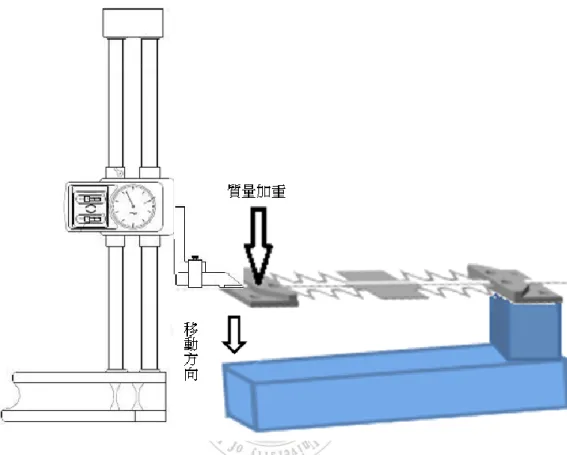
如圖 4-2-6-1 所示,我們在傳感器的一端加上質量來觀察傳感器 的移動來再計算出其彈性係數。
37 實驗中利用高度規(精密度 0.01 mm)來測量當在傳感器上加質量後 的移動量,以下圖 4-2-6-2 是外加質量與傳感器移動的關係圖 0.0 8.4 16.8 25.2 33.6 42.0 0.0 1.2 2.4 3.6 4.8 6.0 移動量 (mm ) 重量(g) 移動量 圖 4-2-6-2 傳感器加質量與移動量關係 利用虎克定律公式計算出傳感器的彈性係數(K 值)。公式如下式 31 所示:
k=
(m2−m1)∗9.8∗10−3 (d2−d1)∗9.8∗10−3(31)
k = 74.56 𝑛𝑡 𝑚
⁄
(7) 實驗數據理論模擬分析
如圖 4-2-7-1 所示,將前面實驗所得到外加電壓與光柵 120Hz 的 頻率響應與外加質量的關係,使用前面所量測得到的彈力常數 k 代入式 (式 17) A= F0 𝑚√(𝑚 − ω𝑘 2)2+ 4 ( 𝑐 2𝑚) 2 ω238
利用 OrigenPro9 數學處理軟體進行最小方差擬合(least mean
square fitting),得到如圖 4-2-7-1 的擬合曲線及擬合參數阻尼係數 𝑐 = 10−6,傳感器質𝑚 0 = 1.288 × 10−4𝑘𝑔,若將 m0及上面所求得的彈力 常數 k=74.56 nt/m 代入求傳感器的自然頻率ω0 = √𝑘 𝑚⁄ ,得到ω0= 121 Hz 與我們的量測頻率 120 很接近,這也合理說明光柵傳感器在 120Hz 有比較好的響應。 -0.0025 0.0000 0.0025 0.0050 0.0075 0.0100 0.0125 50 55 60 65 70 75 80 85 90 95 100 105 振幅 質量(kg) 電壓AC100V固定改變質量之振幅響應值 帶入驅駛振盪公式Fit
Model NewFunction4 (User)
Equation y=A*55/((10*(75.46-(M*100+x)*(120*6.28)^2)^2 +(C)^2*(120*6.28)^2)^0.5)*(10^4) Reduced Chi-Sqr 11.89814 Adj. R-Square 0.95524
Value Standard Error
振幅
C 1E-6 0
A 3.99268 0.36695
M 1.28683E-4 1.45922E-5
39
第五章結論
本論文完成光纖光柵交/直流電源感測器,在直流電源的方面可以量測電壓 範圍從0V 到150V 精準度可達到±10V,雖然目前的精準度還未達到理想目 標,未來可以在傳感器的機構設計上加強,希望可以朝向家庭所使用的弱電,如 電話電源、網路控制器電源,LED 燈電源及警報器電源等的監控,在交流電源的 方面可以量測電壓範圍從80V 到110V 精準度可達到±5V,以上二個類別的 電壓感測器可以運用在智慧家庭電源做即時的監控,讓智慧家庭監控系統方面得 以更完整及提高安全性。 論文中所建立光纖光柵傳感器的驅使震盪理論模型,有助於光纖光柵電壓量 測的改良,由實驗的數據得知當阻尼係數趨近於0時,可以得到的頻寬較窄且振 幅響應值高、雜訊少這也有助於量測的精確度,光纖光柵傳感器的質量愈輕則所 得到的信號響應愈大。40
參考文獻
[1] K. O. Hill, Y. Fujii, D. C. Johnson and B. S. K, "Photosensitivity in optical fiber waveguides: Application to reflection filter fabrication," Communications Research Centre, Canada, 1978.
[2] J. L. Hall, J. Ye, S. A. Diddams, L.-S. Ma, S. T. Cundiff and D. J. Jones,
"Ultrasensitive Spectroscopy, the Ultrastable Lasers,the Ultrafast Lasers, and the Seriously Nonlinear Fiber: A New Alliance for Physics and Metrology," IEEE
JOURNAL OF QUANTUM ELECTRONICS, vol. 37, pp. 1482-1492, 2001.
[3] G. Meltz, W. W. Morey and W. H. Glenn, "Formation of Bragg gratings in optical fibers by a transverse holographic method," Optics Letters, vol. 14, pp. 823-825, 1989.
[4] 彭朋群 且 賴暎傑, “科學發展,” 編號 386, pp. 28-33, 2005.
[5] T. Erdogan, "Fiber Grating Spectra - Lightwave Technology," IEEE, vol. 15, no. 8, pp. 1277 - 1294, 6 8 2002. [6] 方世維, “利用鎖模技術於光纖光柵信號解調及其量測特性分析研究,” 2015. [7] 梁肇基,基礎物理學,譯者,旗文書局, 1985.pp.507 [8] 林宸生 和 陳德清, 雷射工程導論, 第 2 版 編者, 全華科技圖書股份有限 公司, 2001. [9] 蔡仲尼,林誠孝,羅煜聘,洪耀正,蔡振凱,楊勝州,吳添全,劉育松, 普通物理 學上, 第一版, 編譯, 歐亞書局, 2013 ,pp.221 [10] 李怡嚴, 大學物理學, 第十五版 編者, 東華書局, 1987.
[11] J. B. Marion, Classical Dynamics of Particles & Systerns 3nd ed. (歐亞書局,台灣 版,1985 ), pp. 114
41
[12] 謝文軒, “環型光纖信號解調儀係統及量測特性之研究,” 2010.
[13] 林穀欽, LVIEW 基礎程式設計及應用, 第三版, 編著, 全華圖書股份有限公 司,pp.1-2,2004.