行政院國家科學委員會補助專題研究計畫
成 果 報 告
□期中進度報告
水下載具應用於海底管線檢修之關鍵技術研發-子計畫一
水面工作載台動態定位系統之數值模擬與操控(3/3)
計畫類別:□ 個別型計畫
■ 整合型計畫
計畫編號:NSC 96-2221-E-006-329-MY3
執行期間:
96 年
8 月
1 日至
99 年
7 月 31 日
計畫主持人:方銘川
計畫參與人員:李子宜
、歐家銓
成果報告類型(依經費核定清單規定繳交):□精簡報告 ■完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
■出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:國立成功大學系統及船舶機電工程學系
中
華
民
國
99
年
10
月
15
日
中文摘要 本研究計畫是為建立一與水下載具配合的工作載台之定位控制系統,包括水面工作 平台之外力計算模式之推導建立與模擬,水面工作平台之動態定位系統之配置設計與控 制方法之研究與驗證,以及海上實體之整合測試驗證。由於目前國內一般海底管線之檢 測無法隨時備有一專用之工作母船,且不一定有定位系統,因此常以一般之非專業之船 隻來代替使用,因而造成沒有準確的定位,無法完成任務。本計畫擬針對此項需求,針 對工作載台之動態定位作一深入研究,第一年將針對風力、洋流力以及波浪引起之非線 性力之數學模式作深入探討。第二年將建立一以 PD 或 PID 控制之海上工作載台定位最 佳化系統,並做小型模型測試。第三年則配合其他子計畫擬以一駁船配置本子計畫之定 位控制系統與水下載具搭配作海上試驗證計算模擬,並規劃設計駁船工作平台之一般佈 置圖以及相關穩度安全評估,整個子計畫將建立國內第一艘外加組合之工作平台的動態 定位系統,有助於國內海底管線檢測能力之提升。 關鍵詞:水下載具、水面工作平台、動態定位、非線性力
ABSTRACT
The present sub-project is to establish a dynamic positioning system of supported vessel to match up underwater vehicle operation in the ocean, which includes the calculation model for external forces on the surface supported vessel, the research of the arrangement design and control technique, and the sea trial test at sea. At present the ocean piping investigation can not be always made by an exclusive supported vessel. Besides, the vessel may not equip with the dynamic positioning system and is usually replaced by unprofessional one. Therefore the mission can not be achieved without precise positioning. Based on this requirement, the present project will make a deep research on such subject. The first year is to establish the mathematical model with the external forces including the wind, the current and the nonlinear drifting force due to waves. The second year is to establish the optimal control system, either by PD technique or PID technique, for the supported vessel and the model test is included. The third year is to make the sea trial test computational simulation to verify the integrated model and the general arrangement for the control system on board and the stability analysis are also included. The present sub-project is going to establish the first supported vessel with the external assembly dynamic positioning system which will promote the ability for the ocean piping investigation.
Keywords: underwater vehicle, surface supported vessel, dynamic positioning, nonlinear force
目
錄
頁次 中文摘要...I ABSTRACT ...II 目錄... III 一、前言... 1 二、相關研究與文獻... 1 三、研究方法... 2 四、成果... 3 五、總結... 43 六、計畫成果自評... 44 參考文獻... 44 誌謝... 46 附錄: (已發表之相關論文) ... 46 出席國際學術會議 ICHD 心得報告及發表之論文 ... 47一、前言 本 ROV 研究團隊(包含成功大學與中山大學)於前一階段三年期國科會專題研究計 畫中,對於國內水下無人載具 ROV 之相關關鍵技術與系統整合已培養了初步開發之能 力。為因應石油和天然氣探勘產業快速拓展的需要,船舶動態定位的需求已迅速成長。 具有船舶動態定位功能的船隻可運用在採樣、探勘生產鑽井、佈放修理海纜及海管、水 文調查、海洋學研究等方面的工程或應用。由於動態定位船昂貴且國內使用的數量極 少,因此本計劃的目的在於使用組合式動態定位平台取代一般動態定位專業船,不僅機 動性較一般船隻較佳,所需動力亦較小,並且可搭配水下載具完成需要定位移動才能完 成上述的檢測工作。因此如何使水面工作載台有準確之動態定位並整合水面定位平台及 水下載具上各系統的電力供應及訊號傳輸而能正常作用,使水下載具順利達成海底管線 檢測及相關的維修,將是此整合計畫最重要的目標。 目前國內有許多機構(例如八里汙水廠、台電、海軍、海巡署等等)均有海底管線 之維修與檢測問題均必須藉助於水下載具之協助。然而光有水下載具沒有水面工作母船 之配合,水下載具將無法發揮功能,因為水下載具是由水面工作母船上來控制的,因此 其所需的電力配置、動態定位之配合以及相關之控制系統之設計,均需工作母船,而水 下載具為了達成檢測之目的,亦要有定位控制以及辨識甚至採樣的能力,此外,海底輸 送管線因為颱風造成管線底部填方遭海流淘空,亦必須設法進行填補與覆蓋維修作業, 此時便必須要有精準的投石填方覆蓋,因此水面工作母船或載台與水下載具之完整搭配 極為重要。而傳導的水面工作母船均配合完整之設備,除了水下載具之遙控與監控系統 外,本身均備有動態定位系統,例如裝有船推器或 Azimuth 推進系統,因為整個設備包 括船舶本身之經費昂貴,不可能只為海底管線之檢測用。因此若能有一套外加式之臨時 組裝水面工作載台可以達到同樣功能,來搭配水下載具,將可為海底相關之管線檢測帶 來一經濟且實用之工具,解決許多有關單位之問題。 二、相關研究與文獻 本子計畫即針對此問題,擬研究以目前常用之駁船加以搭配相關之動態定位系統, 除了研究如何設計以外加組合之方式加入簡易之推進系統外,並加入動態定位控制之研 究,其中將包括外力之數值模擬,以及定位控制之方法選擇。因此為了配合整合計畫之 研發。本計畫將針對水面工作載台之外力包括風力、洋流力及波浪之非線力(即漂移力) 動態定位控制方法之整體數學模式,以及相關之模型與實體測試,作一深入研究。在風 力、洋流力方面均已有相關之經驗式可用如 [1] [2]。而波浪之非線性漂移力方面,一般 有較簡單之遠流場之詳法二維之方法,如[3][4] 。三維之方法如[5]。另外亦可用近流場 之方法,較複雜但較正確容易分析。二維方法如[6][7],三維方法如[8][9]。本計畫主持 人多年來對此兩種方法均有深入瞭解,在計畫中將特別針對三維之方式,以及找出可搭 配平台運動模式之時程領域之解法。為達到簡易之模擬亦可考慮以二維方式來處理。至 於動態控制之理論分析方面,設計的方法有許多種,國外亦有一些相關之文獻。1976 年,Balchen 等[10][11]利用線性最佳控制與 Kalman 波浪理論。1979 年,Grimble 等[12] 利用 PID 控制系統結合 Kalman 濾波器,並將環境外力分成高頻和低頻來模擬。1980 年, Antonio 等[13]利用 PD 控制理論。1987 年,Aalber 等[14]亦使用 PID 控制系統,風和波 浪等外力是採量測波高的方式來計算力的大小。1990 年,Donha 等[15]的控制系統是採 用 LQG 和 Adaptive 控制系統,外力採用數值模擬方式,並有海上的實船測試。
早期的動態定位系統大多使用 PID 控制,針對船的縱移、橫移以及橫搖這三個自由 度來做運動控制,由於高頻運動僅為週期性的震盪並不會使船舶的平均位置產生變化, 因此通常忽略高頻運動,僅對低頻運動加以控制。由於船舶運動數非線性之運動,因此
PID 的效能受到一定的限制,所以將 Kalman 濾波器加入動態定位系統中,以求更廣泛 的應用。不管是一開始的 Kalman 濾波器或是後來的擴展 Kalman 濾波器,其主要作用 是透過量測得到之船舶運動位置訊息估算低頻運動狀態,並加以回饋,以獲得船舶低頻 運動的線性隨機最優控制,即 LQG 控制。除了 PID 控制器之外,還有許多種的控制系 統 可 以 應 用 於 船 舶 動 態 定 位 , 如 Nonlinear Dynamic Surface Control [16] 、 Fuzzy control[17]、CMAC (Cerebellar Model Articulation Controller)[18]等,都有人加以研究。
而國內有 Liang 等[19]利用 SQ(Sequential quadratic)方法[20]來作其最佳化之控制。 本計畫初期將嘗試以簡單的 PD 或 PID 的方法來控制,再經由系統模型之建立,以評估 決定使用何種控制架構以獲得較佳的控制性能。本計畫在動態定位系統之研究上,主要 著重在數學模型之建立以及控制系統模擬,而在控制系統實現上,將結合「子計畫三: 水面工作載台動態定位之推進器及驅動控制系統設計與實現」進行理論與實作之整合。 由於在本研究中之控制推進器初步設定擬以三個模仿類似可轉動之 azimuth 推進器為 對象,因此屬於一多重輸入多重輸出之控制方式,再配合加上非線性之運動模式,因此 屬於相當複雜之控制型式。另外為了找到最後的增益係數,亦可能採用基因演算法來求 取。本計畫所擬使用之水面工作載台,並非一具動態定位控制系統之專業船,而是另外 提出一創新的想法,即擬設計一可機動組合的載台可隨時搭配水下載具作業,因此必須 作詳細之規劃。分三年實施,本年度為第三年,已順利完成。以下就三年來計畫之進行, 作一整體說明: 第一年,目標如下: (1)彙整適用之風力、洋流以及波浪漂移力(即非線性力)之相關理論。 (2)風力與洋流力將以經驗公式為主,而波浪之非線性流體動力,將仍以三維勢流理 論為基礎,建立一時域模擬之數學模式。 (3)配合水面工作載台之三度運動方程式,建立一具有漂流力、風力、洋流力以及水 下載具偶合之數學模式。 第二年,目標如下: (1)安排設計控制水面工作載台之控制配置,包括前進及側移,兩大功能之控制器。 (2)加入自動控制於水面工作載台之運動數值模式,建立最佳控制模式。 (3)建立小尺寸模型實驗與數值模擬作驗證。 (4)規劃整合水面工作載台之實測系統。 第三年,目標如下: (1)建立完整之實體之運作模式。 (2)規劃設計配置水面工作載台之控制系統。 (3)完成整體海上作業之試驗計算模擬及水面工作載台之一般佈置圖與穩度評估。 三、研究方法 第一年,研究方法如下: 1 針對水面工作載台遭遇之外力數值需求,先彙整風力與洋流力之相關經驗公式。 2 針對波浪非線性力,將以近流場之勢流理論並加入時程領域之觀念,並擬利用不規 則波的線性重疊法來運算相關之時程模擬。 3 以過去發展成功具臍帶之 ROV 運動方程式加入水面工作載台之運動方程式整合與 水下載具成一完整的之偶合運動方程式。
2 擬先採用簡便之控制方法 PD 及 PID 兩種方法來控制定位問題,並同時評估其他設 計方式以便可比較擇優選用,並與子計畫三配合。 3 利用小尺寸之模型試驗至戶外水池或水庫與 GPS 搭配來驗證可行性。 4 為了未來可用於海上實測,先行規劃水面工作載台之各種配置,提供配合作海上駁 船試驗計算模擬與其他子計畫作參考。 第三年,研究方法如下: 1 選定水面工作載台之型式大小(暫以駁船為目標)。 2 與各子計畫研商必需之周邊設備及其相關資料,計算其安全穩度評估。 3 與各子計畫配合作海上駁船試驗計算模擬,並作修正控制器。 四、成果 第一年,成果如下: 4.1 彙整風力與洋流力之相關經驗公式: 4.1.1 風力 對於上層結構較大的船型而言,水面上的投影面積會比水面下的還大,此時的風力 作用會對操船產生不小的影響。作用在船舶上的風力,可由下式公式來算得: 2 2 1 ) ( R a f R W WF X A V X (4-1) 2 2 1 ) ( R a S R W WF Y A V Y (4-2) 2 2 2 1 ) ( S R a R W WF V L A K K (4-3) 2 2 1 ) ( R a S R W WF N A LV N (4-4) 式中的 XW、YW、KW和 NW為風力係數,是相對風向角的函數;AR f和 AS分別代表船隻 在水面上的縱向與側向投影面積,是空氣密度,而 Va R是船隻與風的相對速度。風力 係數 XW、YW和 NW可參考文獻[1]的各型船舶風力試驗結果,而文獻[27]提到風力所造成 的橫搖力矩對一般船舶的影響很小可予以忽略,故在此設 KW為零。 4.1.2 洋流力 潮流與船的相對作用關係在船體固定座標系之定義如下: cos cx c c G V V x (4-5) sin cy c c G V V y (4-6) c V = 潮流速率 c = 潮流方向與固定座標系的夾角 , G G x 通過船體重心之固定座標系統y
圖 4-1 洋流與船體座標系統 依據船體所在位置,設定船體所遭遇的潮流作用力。 2 2 cx c G c G cx 1 F = [(V cos - x ) +(V sin - y ) ]BdC 2 (4-7) 2 2 cy c G c G pp cy 1 F = [(V cos - x ) +(V sin - y ) ]L dC 2 (4-8) 2 2 2 C c G c G pp cn 1 N = [(V cos - x ) +(V sin - y ) ]L dC 2 (4-9) 其中 arctan( cy) cr cx V V (4-10) 固定座標系與船之夾角 4.1.3 非線性力計算方法 以 Salvesen[25]提出的船體非線性力計算法,在自由液面,船殼上的作用力為 2 1 | | 2 B F S S S d F nds n ds dt n
(4-11) SB 為船體浸水面積,S∞為遠流場之控制表面,SF 為遠流場控制表面下之部份自由液面。 使用 Newman[26]的假設,如果船舶為瘦型船舶,或是潛入較深的水中,可假設其為一 弱振體(Weak Scatterer),也就是繞射波與輻射波位勢極小於入射波位勢(
B
I ),並浸水面積 SB。 為了求取非線性力的平均值,對(4-12)取時間平均值 dt t F T F t T t
0 0 ) ( 1 (4-13) 再利用動量定理,得到穩態二階力為
B S I B B ds n n F ( ) * 2 1 Re (4-14) 其中 D m m R m B S
6 1 (4-15) 若只考慮水平分量則 * 0 * ) sin (cos I I iK i j (4-16) 將(4-16)代入(4-14)得 ) sin (cos ) ( 2 Re 0 *ds i j n n K i F B S I B B
(4-17) 再把(4-15)帶入(4-17)結果為 ) sin (cos ) ( 2 ) ( 2 Re * 0 6 1 * 0 j i ds n n K i ds n n S K i F B B S I D D m S I R m R m
(4-18) 假設
B S I m R m m ds n S K i F1 0 * 2 Re (4-19)
B S I m R m m ds n S K i F 0 * 2 2 Re (4-20)
B B S I D S I D ds n K i ds n K i F 0 * * 0 3 2 2 Re (4-21) 結果簡化為 ) sin (cos ) ( 6 1 3 2 1 j i F F F F m m m
(4-22) 其中由 Salvesen 方法計算出的船體平均漂流力F 與平均附加阻力D F ,其表示式分別如A 下 ( ) sin sin | | 6 1 3 2 1
m m m D F F F F F (4-23) ( ) cos sin | | 6 1 3 2 1
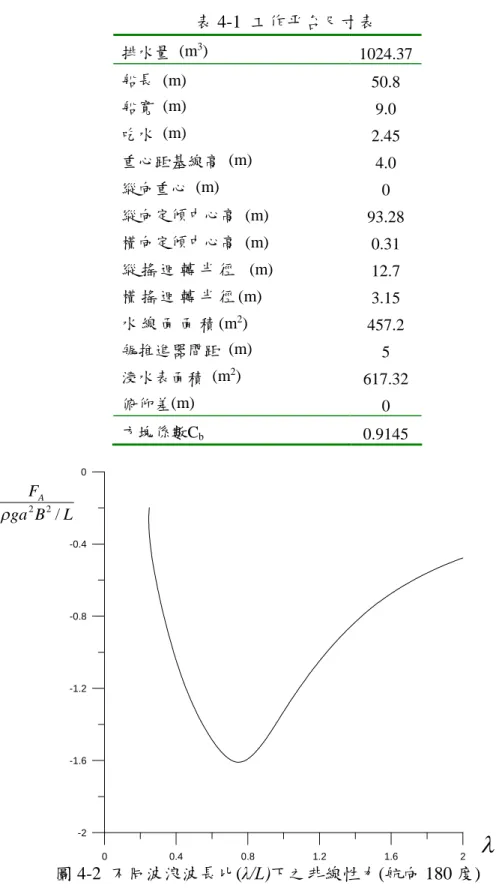
m m m A F F F F F (4-24) 非線性力之 RAO 計算,以一工作平台為測試模型,其詳細尺寸如表 4-1,計算結果如圖 4-2 所示,圖中可觀察到非線性力為負值,代表此模擬條件下,非線性力為一阻力,在 λ/L=0.75 時,達到無因次化最大值-1.6,此頻率下工作平台會明顯受到非線性力影響。表 4-1 工作平台尺寸表 0 0.4 0.8 1.2 1.6 2 -2 -1.6 -1.2 -0.8 -0.4 0 圖 4-2 不同波浪波長比(λ/L)下之非線性力(航向 180 度) 為了計算非線性力對工作平台的移動軌跡的影響,同樣以上表 50.8 公尺之工作平台 為模型,模擬 3 種波長船長比 λ/L=0.5、1.0 及 1.5,波向 0 度及 180 度,規則波波高 H=0.5 排水量 (m3) 1024.37 船長 (m) 50.8 船寬 (m) 9.0 吃水 (m) 2.45 重心距基線高 (m) 4.0 縱向重心 (m) 0 縱向定傾中心高 (m) 93.28 橫向定傾中心高 (m) 0.31 縱 搖 迴 轉 半 徑 (m) 12.7 橫 搖 迴 轉 半 徑 (m) 3.15 水 線 面 面 積 (m2) 457.2 艉推進器間距 (m) 5 浸水表面積 (m2) 617.32 俯仰差(m) 0 方塊係數Cb 0.9145 L B ga FA / 2 2
L
/
度、λ/L=1.0 包含非線性力計算之船體六度運動時間歷程圖。 -200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir ec ti o n 90 deg. 0 deg. 180 deg. 270 deg. 圖 4-3 航向 180 度之船體軌跡, (λ/L=0.5 ,H=0.5m) -200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir e c ti o n 90 deg. 0 deg. 180 deg. 270 deg. 圖 4-4 航向 0 度之船體軌跡, (λ/L=0.5 ,H=0.5m)
-200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir e c ti o n 90 deg. 0 deg. 180 deg. 270 deg. 圖 4-5 航向 180 度之船體軌跡, (λ/L=1.0 ,H=0.5m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir e c ti o n 90 deg. 0 deg. 270 deg.
-200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir e ct io n 90 deg. 0 deg. 180 deg. 270 deg. 圖 4-7 航向 180 度之船體軌跡, (λ/L=1.5 ,H=0.5m) -200 -100 0 100 200 Y0(m) -200 -100 0 100 200 X0 (m ) Original
with Nonlinear Force
w a v e d ir e c ti o n 90 deg. 0 deg. 180 deg. 270 deg. 圖 4-8 航向 0 度之船體軌跡, (λ/L=1.5 ,H=0.5m)
0 100 200 300 400 (sec.) -1 0 1 (d e g .) ROLL 0 100 200 300 400 (sec.) -0.8 -0.4 0 0.4 0.8 (d e g .) PITCH 0 100 200 300 400 (sec.) 162 180 198 (d e g .) YAW 0 100 200 300 400 (sec.) 0 0.001 0.002 0.003 0.004 (m ) HEAVE 0 100 200 300 400 (sec.) -1 0 1 (m ) SWAY 0 100 200 300 400 (sec.) -0.1 0 0.1 0.2 (m ) SURGE 圖 4-9 船體六度運動(航向 180 度,λ/L=1.0 ,H=0.5m) 4.2 建立一時域模擬之數學模式 4.2.1 船體動態數學模式 座標系統 分析船體運動模式通常需要訂定三個不同基準之座標系統,一為大地座標系,一為 船體座標系,一為水平船體座標系;前三種是船體所使用之座標系,定義如圖 4-10 所 示。
圖 4-10 座標系示意圖 其中 G-xyz 為船體座標系統,OX Y Z0 0 0為大地座標系,Gxyz為水平船體座標系。 1、1、1為船體的尤拉角,並利用尤拉角表示水平船體座標系與船體座標系之間的 座標轉換,並假設船體為左右對稱的細長體,且船體在運動時的縱搖角度很小。船體重 心六度運動模擬程式係依據這些假設並且參閱文獻[23,24]和 Hamamoto 等人[21,22] 推導的數學模式。有關水平船體座標系下的詳細數學模式推導,可參閱文獻[23]。 船體運動方程式 對於船體,假設其所具備的六個自由度運動包括縱移(SURGE)、橫移(SWAY)、起 伏(HEAVE)、橫搖(ROLL)、縱搖(PITCH)以及平擺(YAW)。由牛頓第二運動定律可得到 船體運動方程式。 縱移
0 ( ) ( ) ( ) ( ) 1 y e v x e Z e FK WF p D cx Tx x m u v m X v m u m w X X T t R X F F F (4-25) 橫移
0 y ( ) ( ) ( ) ( ) F x e y e v vv FK DF e WF D cy Ty v m v u m u m v Yv Y Y Y v v Y v Y Y Y Y Y F F (4-26) 起伏 0( )
( )
( )
( )
( )
( )
( )
F
z e w e e e e FK DF e zmw
m
w Z
w Z
Z
Z
Z
Z
mg
(4-27)橫搖 0 ( ) ( ) ( ) ( ) ( ) ( ) ( ) xx e xx e xx e xx e v H FK DF e WF Tx x I I J J K Y v Y z K K K N M
(4-28) 縱搖 0 y( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
yy e xx e xx e yy e e e w e w e FK DF e TyI
I
J
J
M
M
M
w M
w M
M
N
M
(4-29) 平擺 2 2 0 z ( ) ( ) ( ) ( ) ( ) ( ) ( ) zz e xx e xx e zz e v v vv v v v v v v H FK DF e WF D C Tz I I J J N v N v N N N v N v N N v N Y v Y Y v v Y v Y x N N N N N N M (4-30) 綜上所述,船體六度運動模式的各項符號可以整理如表 4-2,除移動速度分量係在水平 座標系下,附加質量、質量慣性矩與附加質量慣性矩其各軸之定義皆是在船體座標系 下。m 是船體質量,g 是重力加速度。在方程式(4-27)和(4-29)之中,可在 Frank close-fit 方法求得起伏和縱搖的流體動力係數;ω為波頻。(4-25)到(4-30)式中,下標 FK 和 DF 分別表示 Froude-Krylov 力、繞射力;XD、YD、ND為波浪漂流力及力矩;Fcx、Fcy、Nc 為洋流力及力矩;Fx、Fy、Fz、Mx、My、Mz為繫纜之張力的分力。 表 4-2 船體六度運動模式之符號 x y z 移動速度分量 u v w 附加質量 mx( ) my( ) mz( ) 質量慣性矩I
xxI
yyI
zz 附加質量慣性矩 Jxx( ) Jyy( ) Jzz( ) 4.2.2 ROV 動態數學模式 分析 ROV 運動模式通常需要訂定兩個不同基準之座標系統,一為大地座標系,另 一則為船體座標系(如圖 4-11)。其中 OXYZ 為大地座標系統亦隨附於一固定支援母船 上面,以及 oxyz 為附隨在 ROV 的動座標系統。而 Z 軸方向朝下表示海面下為正,X 和 x 座標方向分別指向支援母船船艏以及 ROV 船艏。一般而言,o 的位置通常指定於 ROV 的重心位置,用來簡化 ROV 動態方程式推導。圖 4-11 ROV 之大地座標與船體座標示意圖 ROV 運動方程式 縱移 ( ) ( ) ( ) ( ) ( ) ( )sin u G G G G G w G v u u u thruster umbilical m X u mz q my r mp y q z r mx q mw Z w q mx r mv Y v r X X u u W B F F (4-31) 橫移 ( ) ( ) ( ) ( ) ( ) ( ) cos sin v G G G w G G G u v v v thruster umbilical m Y v mz p mx r p my q mw Z w mq z r x p my r mu X u r Y Y v v W B F F (4-32) 起伏 ( ) ( ) ( ) ( ) ( ) ( )cos cos w G G G v G u G G w w w thruster umbilical m Z w my p mx q p mz p mv Y v q mz q mu X u mr x p y q Z Z w w W B F F (4-33) 橫搖 ( ) ( ) ( ) ( ) ( ) ( )
( ) ( )cos cos ( )cos sin
G G x p xy xz G G w G G v yz xz z r yz xy y q p p p G B G B thruster umbilical mz v my w I K p I q I r mu y q z r v Z w my p mw w mv mz p Y v I q I p I r N r q I r I p I q M q r K K p w y W y B z W z B M M (4-34) 縱搖 ( ) ( ) ( ) ( ) ( ) ( )
( ) ( )sin ( ) cos cos
G G xy y q yz G w G G u G yz xz z r xz yz x p q q q G B G B thruster umbilical mz u mx w I p I M q I r u mx q mw Z w mv z r x p w X u mz q mu I q I p I r N r p I r I q I p K p r M M q q z W z B x W x B M M (4-35) 平擺
( )
( ) ( ) ( )
( ) ( )
( ) ( ) cos sin ( )sin
G G xz yz z r G v G u G G yz xy y q xz xy x p r r r G B G B thruster umbilical my u mx v I p I q I N r u mx r mv Y v v my r mu X u mw x p y q I r I p I q M q p I r I q I p K p q N N r r x W x B y W y B M M (4-36) 4.3 含漂流力、風力、洋流力之水面工作載台與水下載具偶合運動之數學模式。 本研究計劃中,利用到下列兩種數值方法來解船體與 ROV 之運動方程式以及纜繩 之形狀與張力 4.3.1 四階 Runge-Kutta 數值方法 設
x
f t x
( , )
(4-37) 則6
2
2
2 3 4 1 1K
K
K
K
x
x
n
n
(4-38))
,
(
1t
f
t
nx
nK
(4-39))
5
.
0
,
5
.
0
(
1 2t
f
t
t
x
K
t
K
n
n
(4-40))
5
.
0
,
5
.
0
(
2 3t
f
t
t
x
K
t
K
n
n
(4-41))
,
(
3 4t
f
t
t
x
K
t
K
n
n
(4-42) 若為多變數,如)
,
,
(
1 2 1 1f
t
x
x
x
(4-43))
,
,
(
1 2 2 2f
t
x
x
x
(4-44) 6 2 2 2 3 4 1 1 1 1 K K K K x x n n (4-45)6
2
2
2 3 4 1 2 2 1L
L
L
L
x
x
n n
(4-46))
,
,
(
1 2 1 1t
f
t
x
nx
nK
n (4-47))
,
,
(
1 2 2 1t
f
t
x
nx
nL
n (4-48) 2 1( n 0.5 , 1n 0.5 1 , 2n 0.5 1 ) K t f t t x K t x L t (4-49) 2 2( n 0.5 , 1n 0.5 1 , 2n 0.5 1 ) L t f t t x K t x L t (4-50) 3 1( n 0.5 , 1n 0.5 2 , 2n 0.5 2 ) K t f t t x K t x L t (4-51) 3 2( n 0.5 , 1n 0.5 2 , 2n 0.5 2 ) L t f t t x K t x L t (4-52) 4 1(n , 1n 3 , 2n 3 ) K t f t t x K t x L t (4-53) 4 2(n , 1n 3 , 2n 3 ) L t f t t x K t x L t (4-54) 依此類推。4.3.2 多重局部搜索方法 計算步驟如下: 1.選擇一開始點(
T
、
、
),以及j
方向的之步幅
T
j、
j、
j,j
=1,2,3…,n。 2.求(T
T
1、
、
)、(T
、
1、
)、(T
、
、
1)等點之目標函數值, 並與((T
、
、
)比較保留最佳點(T
、
+
1、
)。 3.再求(T
T
2、
+
1、
)、(T
、
+
1
2、
)、(T
、
+
1、
2)等 點之目標函數值,並與(T
、
+
1、
)比較,保留最佳點(T、
+
1、
-
2)。 4.重複步驟 3.的方法在各方向加減設定之步幅求其目標函數值,並保留最佳者,直至 各變數方向均已探測過。 5.假如局 部搜 索階 段完 成 , 無 所進 展 , 則將 步幅減 半 (
T
i=T
i2
、
i = i2
、 i
= i2
),再進行局部搜索。 6.如果步幅已小於或等於設定之允許誤差範圍,即 i iT
(4-55) i i
(4-56) i i
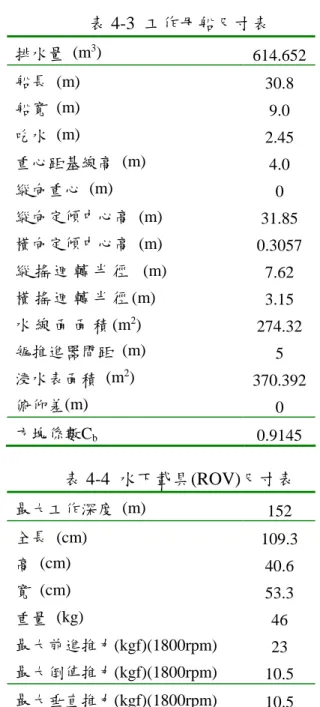
(4-57) 則搜索停止,以最後的最佳點為所求之解。 4.3.3 船體運動與 ROV 運動偶合效應 由於母船與 ROV 為一整合系統,其運動將相互影響。因此處理本問題,可依下列 步驟來進行。 1.先利用多重射擊法一次來設定初期狀態。 2.先假設船體位置固定,利用 ROV 之運動方程式,找出 ROV 之新位置,並依多重射 擊法找出纜繩之新形狀及新張力。 3.將 ROV 之新位置固定,利用船體在波浪中之動態反應方程式及新張力,找出瞬時之 船體運動,並計算出船上下放 ROV 之下放點之新座標,並以多重射擊法找出纜繩新 形狀與新張力。 4.將步驟 3 所計算之船上 ROV 下放點新座標固定,配合水下 ROV 之動態方程式與新 張力及多重射擊法,找出此時之攬繩新形狀及新張力,以及 ROV 知心位置。 重複步驟 3、4 即可找出船體與 ROV 之偶合運動。 本研究使用一艘水面工作母船,在不同海況影響下有、無動態定位系統之六自由度 運動反應及臍帶電纜形狀和張力變化影響水下載具之六自由度運動反應,計算船型及水 下載具之主要項目表如表 4-3、表 4-4 及圖 4-12。所示從圖 4-13 與圖 4-14 比較,可看出 在 DP 控制下,工作母船可保持一定點,使 ROV 在固定工作範圍內順利作業。表 4-3 工作母船尺寸表 排水量 (m3) 614.652 船長 (m) 30.8 船寬 (m) 9.0 吃水 (m) 2.45 重心距基線高 (m) 4.0 縱向重心 (m) 0 縱向定傾中心高 (m) 31.85 橫向定傾中心高 (m) 0.3057 縱 搖 迴 轉 半 徑 (m) 7.62 橫 搖 迴 轉 半 徑 (m) 3.15 水 線 面 面 積 (m2) 274.32 艉推進器間距 (m) 5 浸水表面積 (m2) 370.392 俯仰差(m) 0 方塊係數Cb 0.9145 表 4-4 水下載具(ROV)尺寸表 最大工作深度 (m) 152 全長 (cm) 109.3 高 (cm) 40.6 寬 (cm) 53.3 重量 (kg) 46 最大前進推力(kgf)(1800rpm) 23 最大倒俥推力(kgf)(1800rpm) 10.5 最大垂直推力(kgf)(1800rpm) 10.5
圖 4-12 水下載具(ROV)外觀
圖 4-13 工作母船與 ROV 位置變化(無 DP 控制) ROV
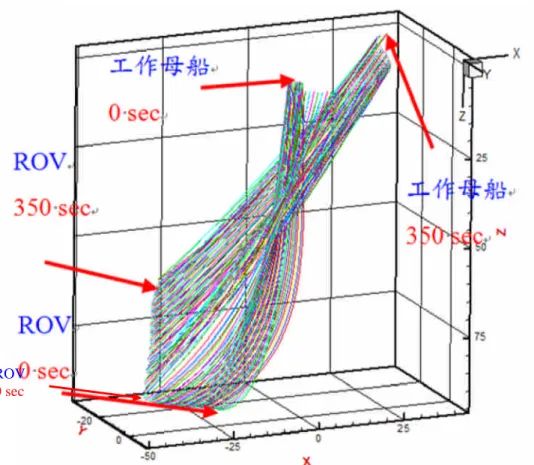
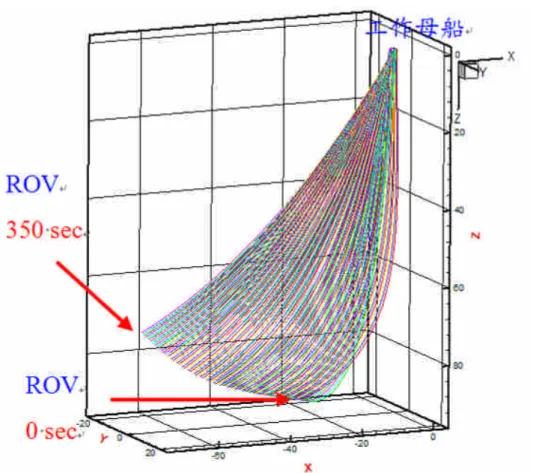
圖 4-14 工作母船與 ROV 位置變化(有 DP 控制) 圖4-15、圖4-16為波向180度之環境下,有、無動態定位系統之工作平台及水下載具 偶合動態模擬。工作平台受波浪漂流力與波浪同向之風力及洋流,模擬海況為二級海況 (不規則波長峰波,有義波高H1/3=0.43公尺、平均週期=2.9秒、風速=5.14公尺/秒、洋流 速度1.0公尺/秒)。 圖4-15為二級海況下無動態定位系統具有臍帶電纜影響之模擬結果,其工作平台、 水下載具運動狀態與電纜變化情況,由圖中工作平台運動時程模擬,平台有較大之縱向 偏移,拉扯電纜造成水下載具姿態相當之改變。 圖4-16為二 級海況下 開啟動態定 位系統之 模擬結果,PD 控制中 之k值依序為 k1=-88、k2=-270、k3=-3、k4=-18、k5=-100,由圖中動態定位系統之工作平台位置軌跡, 得知工作平台可維持在定點±3(公尺)內。 由以上工作平台有、無船舶動態定位系統的運動模擬結果可得到以下之結論: (1)由於工作平台位置偏移速度加快,臍帶電纜被快速拉扯造成緊繃狀態,水下載具所受 拉力更為明顯,導致其姿態不穩定,以致任務失敗。 (2)由於波浪力、洋流及風力之影響,控制海上工作平台之位移,藉由偶合作用影響電纜 狀態及水下載具運動軌跡與姿態的改變,是完成海上作業需求的關鍵技術。
圖 4-15 臍帶電纜之立體軌跡(二級海況,無動態定位系統,工作平台波向角 180 度)
第二年,成果如下: 4.4 側移與前進所需之推進器形式與配置 為了符合無動力之海上工作載台的動態定位控制系統的需求,在此使用三具無轂式 推進器,其中兩具安裝在船艉,負責控制船舶的前進與後退,並利用轉速不同時,可產 生一力矩,修正工作載台的航向;而另一具則安裝在船側,負責修正橫向的位置誤差。 圖 4-17 推進器形式與配置 4.5 採用簡便之控制方法 PD 來控制定位問題 PD 控制器可簡化成根據航向誤差、縱移、橫移、縱移速度及橫移速度,來調整各 推進器轉速(rps),相關的控制方程式表示如下: 轉速控制: 1 1 2 3( d) n K xK xK (4-58) 2 1 2 3( d) n K xK xK (4-59) 3 4 5 n K y K y (4-60) 其中 1 n 和n 為主前進推器之轉速,2 n 為側推器之轉速。3 x、y分別為縱移與橫移速度。為 目前航向角, 為欲保持航向角。Kd i 為對應之控制增益值。 各推進器之推力可由下式計算 2 4 i i P T T n D K (4-61) 各推進器作用於船體之推力及力矩如下 1 2 ( )(1 ) Tx F T T t (4-62) 3(1 ) Ty F T t (4-63) 3(1 ) Tx N T t d (4-64) 1 2 ( )(1 ) Ty N T T t d (4-65)
第二年規劃設計測試船型大小為 50.8 公尺,詳細尺寸如表 4-5、表 4-6,模擬以 4 種不同波向條件:0 度、45 度、90 度及 180 度,模擬海況參照 ITTC 波譜:長峰波、有 義波高 0.67 公尺、平均週期 3.4 秒,風速及洋流速度分別為 6.17 公尺/秒、0.3 公尺/秒。 波浪、風及洋流方向假設為同方向。模擬中使用的增益值(gain)是採取試誤法(trial and error method)決定,分別為 K1=-15, K2=-80, K3=-50, K4=-15, K5=-200,增益值可能不是最 佳化(optimal)所求得,但仍可達到動態定位的目的。 波向 0 度、45 度、90 度及 180 度之水面平台動態定位軌跡計算結果分別為圖 4-18 至圖 4-21 所示,實線部分為 DP 平台重心移動的軌跡,箭頭則代表平台的位置與航向。 重心(CG)的初始位置設定在原點(0,0),圖 4-18 中可以觀察到平台因為波浪作用的方向 而稍稍的前進,且因計算數值誤差(numerical error)及 DP 控制產生少許的橫向位移誤 差,整體來說,在 500 秒的模擬內,只產生了 0.5 公尺的總誤差量,相當於船長的 1%, 可以滿足定位作業的需求。在斜向波的模擬中如圖 4-19,同樣時間內 x,y 方向最大偏離 原點的誤差量增大為 0.7 公尺(約船長的 1.4%)。圖 4-20 橫浪的模擬中也出現類似的模擬 結果。圖 4-21 在頂浪的模擬中,在 x 方向最大偏離原點 0.25 公尺(約船長的 0.5%),y 方向 0.2 公尺(約船長的 0.4%)。可以推論出動態定位控制系統在模擬頂浪的海況下,有 較好的定位效果。 表 4-5 第二年規劃設計工作平台尺寸表 排水量 (m3) 1024.37 船長 (m) 50.8 船寬 (m) 9.0 吃水 (m) 2.45 重心距基線高 (m) 4.0 縱向重心 (m) 0 縱向定傾中心高 (m) 93.28 橫向定傾中心高 (m) 0.31 縱 搖 迴 轉 半 徑 (m) 12.7 橫 搖 迴 轉 半 徑 (m) 3.15 水 線 面 面 積 (m2) 457.2 艉推進器間距 (m) 5 浸水表面積 (m2) 617.32 俯仰差(m) 0 方塊係數Cb 0.9145
-1.0 -0.5 0.0 0.5 1.0 Y0(m) -1.0 -0.5 0.0 0.5 1.0 X0 (m ) PATH SHIP DIRECTION 0sec. 300sec. 500sec. w av e d ir ec ti o n 圖 4-18 航向 0 度軌跡 -1.0 0.0 1.0 2.0 X0 (m ) PATH SHIP DIRECTION 0sec. 300sec. 500sec. w av e d ir ec ti o n
-3.0 -2.0 -1.0 0.0 1.0 2.0 3.0 Y0(m) -3.0 -2.0 -1.0 0.0 1.0 2.0 3.0 X0 (m ) PATH SHIP DIRECTION 0sec. 200sec. 500sec. w av e d ir ec ti o n 圖 4-20 航向 90 度動態定位平台軌跡 -0.75 -0.5 -0.25 0 0.25 0.5 0.75 Y0(m) -0.75 -0.5 -0.25 0 0.25 0.5 0.75 X0 (m ) PATH SHIP DIRECTION 0sec. 200sec. 300sec. 500sec. w a v e d ir ec ti o n 圖 4-21 航向 180 度動態定位平台軌跡
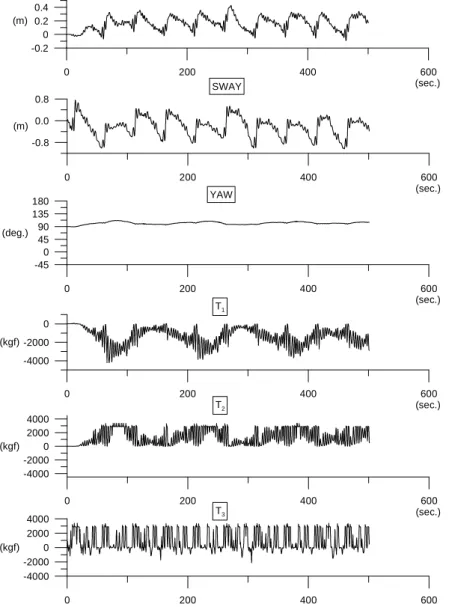
圖 4-22 為在長峰波下,波向 90 度時,Surge、Sway 及 Yaw 方向船體運動在 500 秒 內的變化,T1、T2 及 T3則分別代表兩顆艉推進器與側推進器之推力變化,艉推進器(T1 及 T2)利用運轉方向的差異產生一力矩,抵抗 Yaw 方向之環境外力。在本模擬中,艉推 進器及側推進器約分別需要產生 4000 公斤、3000 公斤的推力,相當於是 270kW 及 200kW 的功率需求。圖 4-23 為螺槳的推力-扭距(K-J)變化圖。 0 200 400 600 (sec.) -45 0 45 90 135 180 (deg.) YAW 0 200 400 600 (sec.) -0.8 0.0 0.8 (m) SWAY 0 200 400 600 (sec.) -0.2 0 0.2 0.4 0.6 (m) SURGE 0 200 400 600 (sec.) -4000 -2000 0 (kgf) T1 0 200 400 600 (sec.) -4000 -2000 0 2000 4000 (kgf) T2 0 200 400 600 (sec.) -4000 -2000 0 2000 4000 (kgf) T3 圖 4-22 船體水平運動之時間歷程及各推進器之推力變化 表 4-6 螺槳尺寸資料 Propeller Diameter (m) 2.8 Propeller Pitch (m) 2.255
0 0.2 0.4 0.6 0.8 1 J(v/nd) 0 0.2 0.4 0.6 0.8 KT & 10*KQ K-J CHART 圖 4-23 K-J 圖 2 -0.0907 - 0.3355 0.4378 KT J J (4-67) 2 -0.0189 - 0.0348 0.0607 KQ J J (4-68) 4.6 小尺寸之模型試驗至戶外海邊與 GPS 搭配來驗證可行性 同子計畫三進行小尺寸( 3 公尺)模型試驗,實驗情形如圖 4-24、圖 4-25,配合全球 衛星定位系統(GPS)進行定位,目的為量測推進器之相關實驗數據,以驗證模擬數值與 提供未來海上實測之參考。圖 4-26 至圖 4-28 則為此實驗條件下之數值模擬結果。 圖 4-24 小尺寸模型
圖 4-25 於港邊進行實驗 小尺寸模型數值模擬條件為:測試船型大小約為 3.67 公尺,詳細尺寸如表 4-7,本 模擬以 2 種不同波向條件:0 度及 180 度,模擬海況以 ITTC 波譜:長峰波、有義波高 0.09 公尺、平均週期 1.4 秒,無風速及洋流。模擬中使用的增益值(gain)是採取試誤法(trial and error)決定,分別為 K1=-300, K2=-2000, K3=-3000, K4=-1000, K5=-2000,由於此次平 台的尺寸較小,受環境外力影響而產生的運動幅度大,建議調高增益值有助於增加反應 靈敏度。 波向 0 度及 180 度之水面平台動態定位軌跡計算結果分別為以下圖 4-26 至圖 4-28 所示,圖 4-26 中可以觀察到平台因為波浪作用的方向而稍稍的前進,整體來說,在 500 秒的模擬內,只產生了 0.2 公尺的總誤差量,可以滿足定位作業的需求。圖 4-27 在頂浪 的模擬中,最大偏離原點 0.2 公尺。圖 4-28 為在長峰波下,波向 180 度時,Surge、Sway 及 Yaw 方向船體運動在 500 秒內的變化,T1、T2 及 T3則分別代表兩顆艉推進器與側推 進器之推力變化。螺槳直徑 0.24 公尺。
表 4-7 小尺寸模型尺寸表 排水量 (m3) 2.738 船長 (m) 3.672 船寬 (m) 1.76 吃水 (m) 0.466 重心距基線高 (m) 0.5 縱向重心 (m) -0.2 縱向定傾中心高 (m) 2.8375 橫向定傾中心高 (m) 0.5549 縱 搖 迴 轉 半 徑 (m) 0.918 橫 搖 迴 轉 半 徑 (m) 0.616 水 線 面 面 積 (m2) 6.2359 艉推進器間距 (m) 0.9 浸水表面積 (m2) 8.6263 俯仰差(m) 0 方塊係數Cb 0.9105 -0.50 -0.25 0.00 0.25 0.50 Y0(m) -0.50 -0.25 0.00 0.25 0.50 X0 (m ) PATH SHIP DIRECTION 0sec. 100sec. 500sec. w av e d ir ec ti o n 圖 4-26 波向 0 度之動態定位平台軌跡圖
-0.5 -0.25 0 0.25 0.5 Y0(m) -0.5 -0.25 0 0.25 0.5 X0 (m ) PATH SHIP DIRECTION 0sec. 100sec. 500sec. w a v e d ir ec ti o n 圖 4-27 波向 180 度之動態定位平台軌跡圖 0 200 400 600 (sec.) 135 180 225 (deg.) YAW 0 200 400 600 (sec.) -0.002 0.000 0.002 0.004 (m) SWAY 0 200 400 600 (sec.) -0.2 -0.1 0 0.1 0.2 (m) SURGE 0 200 400 600 (sec.) -0.04 0 0.04 (kgf) T1 0 200 400 600 (sec.) -0.04 -0.02 0 0.02 0.04 0.06 (kgf) T2 T3
4.7 規劃水面工作載台之實測系統 規劃水面工作載台之實測系統,包括駁船大小、推進器安裝、貨櫃屋、柴油發電機 組、吊具、ROV 周邊配件及其他子計畫所需的設備需求。 圖 4-29 規劃工作駁船及無轂式推進器配置 第三年,成果進度如下: 4.8 收集實測所需之載台、地點以及周邊設備之相關資料 4.8.1 實驗載台之選擇(駁船) 經空間評估後,選擇一駁船為實驗載台之主體,其長、寬、深為 20 m× 6 m× 3m, 排水量約 200 噸,吃水 2.0 公尺,實際的尺寸會依可租賃之駁船而略有差異。以蒐集之 資料看來,100 英呎(33 公尺) 之駁船,亦可做為選擇參考。 4.8.2 貨櫃屋 供人員工作、休息及電子儀器之存放,目前選用 20 呎長的貨櫃屋(6.06 × 2.44 × 2.59 公尺),另可選用 40 呎長的貨櫃屋(12.19 × 2.44 × 2.59 M)。需空調以供人員工作及休息。 表 4-8 20 呎鐵櫃容量尺寸表 容量(m3 ) 最大裝載量(Kg) 淨重(Kg) 33.2 21,850 2,150 貨櫃尺寸 長 寬 高 內部尺寸(m) 5.9 2.35 2.39 外部尺寸(m) 6.06 2.44 2.59 門徑(m) 2.35 2.27
4.8.3 發電機
供給整個實驗平台之動力來源,選擇發電機之發電功率大小之前,先估算各設備所 需之功率大小:
(a)推進器
表 4-9 各推進器所需功率
Propulsor# Propulsor name Max thrust
(kN) Required power (kW) 1 Forward-Thruster 15.7 110 2 Forward-Thruster 15.7 110 3 Side-Thruster 4.9 40 上述推進器功率恰能抵抗最大外力所需,要達到控制的反應的靈敏度,估計需要兩倍的 功率,約(110+110+40)×2=520kW。 (b)水下載具(ROV) 隔離放大器01 隔離放大器05 隔離放大器04 隔離放大器03 隔離放大器02 隔離放大器06 AC 220V(三相) 由船上電力提供 26 + 以下紅色為 +, 黑色為 -260V DC 150V DC 探照燈 3個 110V AC Switch Power 12V 5V G Video 15V G 485 485通訊 + 17 + 18 -8 + 15 -G 推 進 器 命 令 12 V INS + INS -110V AC 110V AC (電燈用) 110V AC PC104 1020 520 300 520 環 場 聲 納 I N S 485通訊 -環場聲納+ 環場聲納-DATA + DATA -AC/AC 穩 壓 器 110V 34 34 35 35 各 三 對 , 共 十 二 條 1 2 3 4 5 6 G 12V com G 12V com DC12 V To AC 110V DC12 V To DC15 V 24V G G G Com Com 260V DC 150V DC G G 9 -AC 220V To DC 260V 27 + 28 - 29 - 26 27 28 29 AC 220V To DC 150V 30 + 31 + 32 - 33 - 30 31 32 33 14 + 壓 力 計 高 度 計 未 定 DC12 V To DC24 V 24V G 12V G 【COM 2】 磁羅經 12V G G 12V RXD TXD RXD TXD D A T A + D A T A -G
表 4-10 ROV 之設備所需功率一覽 設備名稱 使用功率 電壓 電流 用電型態 工業電腦 2W +5V 9.7A DC D/A 卡 1.1W 2.1W +5V +12V 0.22A 0.175A DC 520 推進器(兩顆) 300W +150V 2A DC 300 推進器(一顆) 300W +150V 2A DC 1020 推進器(三顆) 1586W +260V 6.1A DC Transponder 自備電源 INS(定位) 自備電源 磁羅經 4.2W +12V 0.35A DC 壓力計 0.36W +12V 0.03A DC 通訊、控制器材 12W +12V 1A DC 攝影機 6W +15V 0.4A DC 探照燈 (三顆) 100W 110V 0.91A AC 聲納 5W +24V 0.21A DC 整體使用時間 3 小時 根據以上資料估算,ROV 設備所需功率約 5,789W,故所需總功率選定為 6kW。
(c)電腦設備,包含 ROV 控制器,訊號處理器,LCD 螢幕,約需要 1kW (d)吊具 負責起吊 ROV,作業時有些許的額外負載,估計吊車吊臂長度約 2 公尺,起吊能力約 1 噸重,功率約 2kW。由於非頻繁的起吊作業要求,亦可採手搖式吊具之設計,則無功率 之需要,就可省掉電力需求。但兩者均須注意固定方式。 (e)空調 坪數約一個貨櫃屋的大小 4.47 坪(6.06M×2.44M×0.3025),考慮日曬條件(在海上接近於 頂樓的狀況)及坪數,需 8000~10000BTU。估計約需要 3kW。 表 4-11 工作載台所需功率一覽表 項目 功率 (a)推進器 520kW (b)水下載具(ROV) 6kW (c)電腦設備 1kW (d) )簡易吊具(採用油壓電動式) 2kW (e)空調 3kW 總電力 532kW 以上(a)至(e)設備所需電壓有 220V 與 110V 兩種,故需選定匹配之變壓器。綜合以上需 求選定 550kW 以上之柴油發電機組(建議兩台 275kW 以上並聯組合)。 4.8.4 柴油消耗及儲存 以定位作業實驗時間估計,550kW 以 85%運轉功率運行 6 小時,1kW 一小時約消 耗 259c.c.,消耗燃油約(550×0.85×6×259/1000=727 公升),所需的儲油鐵櫃大小約一公 尺立方。 表 4-12 海上測試所需主要經費估算 項目 價格 駁船(買斷) 200 萬 駁船(租用) 1 萬/日 20 呎貨櫃屋 7 萬 發電機(兩部) 260 萬 推進器(三部) 150 萬
油壓電動式吊具(負載約 1 噸) 85 萬 可拆卸活動式手動吊具(負載 約 1 噸) 25 萬 具有執照之船員、技術人員薪 資 0.5 萬/人日 其他費用:(含運送、施工、拖 船、油料、桌椅、儲水櫃、等) 10 萬 以上駁船與吊具,均有兩種選擇方式。建議當駁船採買斷方式,則吊具採油壓電動式, 而駁船若採租用方式時,則採可拆卸活動式手動吊具。 海上實際測試經費估算最少約 500 萬元,由於子計畫二未獲通過及實測經費被刪除,設 備經費嚴重不足,故海上測試改採模擬規劃方式進行。 4.8.5 實驗地點 由於子計畫二及實測經費被刪除,故以沿海附近,以小尺度之模型試驗(子計畫三)為主。 4.9 配置水面工作載台之一般佈置圖與並計算其安全穩度評估 4.9.1 水面工作載台一般佈置圖配置 設計配置水面工作載台之控制系統,包括水面工作載台大小、推進器、貨櫃屋、柴 油發電機組、吊具配置,ROV 操控台周邊配件及其他子計畫所需的設備需求。圖 4-31 為 以實際駁船作為水面工作載台之一般佈置圖之設計。圖 4-32 與圖 4-33 為 ROV 操縱台 佈置圖之正視圖與上視圖
圖 4-32 ROV 操縱台佈置圖 圖 4-33 ROV 操縱台佈置圖 4.9.2 安全穩度評估 根據上述水面工作載台之一般佈置圖及載台上各項裝備物件之重量位置與重心,將 水面工作載台的設計諸元進行靜水性能(HYDROSTATIC)與安全穩度評估分析,各項靜 水性能曲線(HYDROSTATIC CURVES) 與安全穩度曲線表示如下:
0.000 50.000 100.000 150.000 200.000 250.000 300.000 1.500 1.600 1.700 1.800 1.900 2.000 2.100 2.200 2.300 2.400 DRAFT(m) DISPT(+SS, t) DISPT(mld, t) 圖 4-34 排水量(DISPLACEMENT)、模排水體積(DISPLACEMENT MOLDED) 0.000 0.200 0.400 0.600 0.800 1.000 1.200 1.400 1.600 1.800 2.000 1.500 1.600 1.700 1.800 1.900 2.000 2.100 2.200 2.300 2.400 DRAFT(m) TPC(t) MTC(t-m)
圖 4-35 每公分吃水差噸數(TONS PER CM IMMERSION)、每公分俯仰差力矩 (MOMENT TO CHANGE TRIM BY ONE CM)
0.000 0.500 1.000 1.500 2.000 2.500 3.000 3.500 1.500 1.600 1.700 1.800 1.900 2.000 2.100 2.200 2.300 2.400 DRAFT(m) LCB(m) LCF(m) KB(m) TKM(m)
圖 4-36 縱向浮心中心位置(LONGITUDINAL CENTER OF BUOYANCY FROM AMIDSHIPS (+, AFT))、縱向浮面中心位置(LONGITUDINAL CENTER OF FLOATATION FROM AMIDSHIPS (+, AFT))、垂向浮心中心距基線高度(HEIGHT OF CENTER OF BUOYANCY ABOVE BASELINE)、橫向定傾中心距基線高度(HEIGHT OF
TRANSVERSE METACENTER ABOVE BASELINE)
0.000 50.000 100.000 150.000 200.000 250.000 1.500 1.600 1.700 1.800 1.900 2.000 2.100 2.200 2.300 2.400 DRAFT(m) WSA(m^2) WPA(m^2)
圖 4-37 浸水表面積(AREA OF WETTED SURFACE)、水面面積(AREA OF WATER PLANE)
0.000 5.000 10.000 15.000 20.000 25.000 30.000 1.500 1.600 1.700 1.800 1.900 2.000 2.100 2.200 2.300 2.400 DRAFT(m) AM(m^2) LKM(m)
圖 4-38 舯剖面面積(AREA OF MIDSHIP SECTION)、縱向定傾中心距基線高度(HEIGHT OF LONGITUDINAL METACENTER ABOVE BASELINE)
0.000 0.200 0.400 0.600 0.800 1.000 1.200 1.500 1.600 1.700 1.800 1.900 2.000 2.100 2.200 2.300 2.400 DRAFT(m) CB CP CM CW
圖 4-39 方塊係數(BLOCK COEFFICIEN)、稜塊係數(PRISMATIC COEFFICIENT)、舯剖 面係數(MIDSHIP SECTION COEFFICIENT)、水線面係數(WATER PLANE
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0 10 20 30 40 50 60 HEEL ANGLE(degrees) G Z (m )/ D Y N A M IC A L S T A B .( m -r a d ) GZ DYNAMICAL STAB. 圖 4-40 穩度曲線(STABILITY CURVE) 由以上圖表顯示本研究之水面工作載台設計符合安全穩度,可達到一般海上作業之要 求。 4.10 海上實體測試控制器之可行性 由於子計畫二及實測經費被刪除,其他經費亦被縮減近 1/3,故重新評估後,採縮 小尺寸及紙上規劃設計模擬方式處理。並以沿海附近,以小尺度之模型試驗(子計畫三) 為主。 而第三年規劃設計海上實體測試船型大小為 20 公尺,詳細尺寸如表 4-13,模擬以 4 種不同波向條件:0 度、45 度、90 度及 180 度,模擬海況參考 ITTC 波譜:長峰波、 有義波高 0.3 公尺、平均週期 2.4 秒,風速及洋流速度分別為 4.37 公尺/秒、0.3 公尺/秒。 波浪、風及洋流方向假設為同方向。模擬中使用的增益值(gain)是採取試誤法(trial and error method)決定,分別為 K1=-35, K2=-250, K3=-50, K4=-35, K5=-250,增益值可能不是 最佳化(optimal)所求得,但仍可達到動態定位的目的。螺槳直徑及螺槳螺距分別為 1.70 公尺、1.34 公尺。 波向 0 度、45 度、90 度及 180 度之水面平台動態定位軌跡計算結果分別為以下圖 4-41 至圖 4-45 所示,圖 4-41 中可以觀察到平台因為波浪作用的方向而稍稍的前進,且
因計算數值誤差(numerical error)及 DP 控制產生少許的橫向位移誤差,整體來說,在 500 秒的模擬內,只產生了 0.3 公尺的總誤差量,相當於船長的 1.5%,可以滿足定位作業的 需求。在斜向波的模擬中如圖 4-42,同樣時間內 x 方向最大偏離原點的誤差量增大為 0.7 公尺(約船長的 3.5%),y 方向增大為 1.0 公尺(約船長的 5.0%)。圖 4-43 橫浪的模擬 中,x 方向最大偏離原點的誤差量增大為 1.5 公尺(約船長的 7.5%),y 方向增大為 2.0 公 尺(約船長的 10.0%)。圖 4-44 在頂浪的模擬中,在 x 方向最大偏離原點 0.5 公尺(約船長 的 2.5%),y 方向 0.3 公尺(約船長的 1.5%)。亦可推論動態定位控制系統,相對於橫浪和 斜浪的海況下,在模擬頂浪的海況有較好的動態定位效果。 表 4-13 第三年規劃設計模擬工作平台尺寸表 排水量 (m3) 199.004 船長 (m) 20.0 船寬 (m) 6.0 吃水 (m) 2.0 重心距基線高 (m) 1.95 縱向重心 (m) 0 縱向定傾中心高 (m) 16.42 橫向定傾中心高 (m) 0.82 縱 搖 迴 轉 半 徑 (m) 5.0 橫 搖 迴 轉 半 徑 (m) 2.1 水 線 面 面 積 (m2) 114.46 艉推進器間距 (m) 5 浸水表面積 (m2) 180.79 俯仰差(m) 0 方塊係數Cb 0.8292
-0.50 -0.25 0.00 0.25 0.50 Y0(m) -0.50 -0.25 0.00 0.25 0.50 X0 (m ) PATH SHIP DIRECTION 0sec. 100sec.500sec. w av e d ir ec ti o n 圖 4-41 波向 0 度之平台動態定位軌跡圖 -2.0 -1.0 0.0 1.0 2.0 Y0(m) -2.0 -1.0 0.0 1.0 2.0 X0 (m ) PATH SHIP DIRECTION 0sec. 100sec.500sec. w av e d ir ec ti o n 圖 4-42 波向 45 度之平台動態定位軌跡圖
-3.0 -2.0 -1.0 0.0 1.0 2.0 3.0 Y0(m) -3.0 -2.0 -1.0 0.0 1.0 2.0 3.0 X0 (m ) PATH SHIP DIRECTION 0sec. 100sec. 200sec. 500sec. w av e d ir ec ti o n 圖 4-43 波向 90 度之平台動態定位軌跡圖 -0.5 -0.25 0 0.25 0.5 0.75 X0 (m ) PATH SHIP DIRECTION 0sec. 99sec. 200sec. 300sec.400sec.500sec.
w av e d ir ec ti o n
圖 4-45 為在長峰波下,波向 90 度時,Surge、Sway 及 Yaw 方向船體運動在 500 秒 內的變化,T1、T2 及 T3則分別代表兩顆艉推進器與側推進器之推力變化。在本模擬中, 艉推進器及側推進器約分別需要產生 800 公斤、160 公斤的推力,相當於是 55kW 及 15kW 的功率需求。 0 200 400 600 (sec.) -45 0 45 90 135 180 (deg.) YAW 0 200 400 600 (sec.) -0.8 -0.4 0.0 0.4 0.8 (m) SWAY 0 200 400 600 (sec.) 0 1 2 (m) SURGE 0 200 400 600 (sec.) -400 0 400 800 1200 (kgf) T1 0 200 400 600 (sec.) -1200 -800 -400 0 400 800 1200 (kgf) T2 0 200 400 600 (sec.) 0 80 160 (kgf) T3 圖 4-45 船體水平運動之時間歷程及各推進器之推力變化(波向 90 度) 五、總結 以上三年研究成果可綜合總結為如下: 第一年: (1) 完成風力、洋流與波浪非線性力之數學模式。 (2) 完成完整之水面載台六度偶合運動電腦程式。 (3) 完成電腦程式測試與修正。 第二年: (1) 完成水面平台之動態定位控制方法評估。 (2) 完成完整之動態定位控制電腦模擬程式。 (3) 完成小尺度動態定位模型試驗模擬。
(4) 完成大尺度海上實測試驗規劃。 第三年: (1) 完成實測所需之載台、地點以及周邊設備之相關資料收集。 (2) 完成水面工作載台規劃與一般佈置圖設計。 (3) 完成載台穩度評估。 (4) 完成載台與水下載具海上動態定位實測測試模擬。 故以上述本三年度之計畫研究成果來看,已完成各年度所達到之目標。整體而言,本子 計畫一所達到的貢獻有: (1) 配合水面工作載台運動方程式,已建立一具有漂流力、風力、洋流力以及水下載具 偶合之數學模式,可供載台運動模擬評估。 (2) 加入了自動控制於水面工作載台之運動數值模式,建立動態定位控制模式。使水面 工作載台之動態定位變得可行。 (3) 規劃、設計配置水面工作載台之控制及實測系統與一般佈置圖設計。可提供海上可 機動組合且隨時搭配水下載具作業之的載台設計參考。 (4) 提供完成整體海上作業平台之穩度評估方法,確定符合安全穩度,可達到海上作業 之要求。 六、計畫成果自評 第一年所有進度包括風力,洋流力與波浪之非線性流體動力之時域模擬之數學模式以及 船體運動與 ROV 運動偶合效應數學模式已整合完成,可供海上載台運動模擬評估。 第二年所有進度包括加入自動控制於水面工作載台之運動數值模式,以建立最佳控制模 式。安排設計控制水面工作載台之控制配置,包括前進及側移,兩大功能之控制器亦整 合完成。協同子計畫三,完成進行小尺寸模型實驗與數值模擬作驗證。 第三年水面工作載台之實測系統部分,由於經費被縮減近 1/3,故實驗器材租用與購買, 重新評估後,採縮小尺寸及紙上實測規劃方式處理,並規劃、設計配置水面工作載台之 控制與一般佈置圖設計。而整體海上作業平台之穩度評估是符合安全穩度,可達到海上 作業之要求。本計畫成果與經驗仍可提供國內外相關作研究參考用,尤其是對國內水下 技術將有很大的幫助。 參考文獻
[1].Isherwood,R.M.,“Wind ResistanceofMerchantShips”,Trans.RINA,Vol.115, 1973 [2]. Nienhuis, Ir. U., “Simulation of low frequency motions of dynamically positioned
offshorestructures”,Theroyalinstitution ofnavalarchitects,127-145,1986
[3].Maruo,H.“TheDriftofaBody Floating on Waves”JSR,Vol.4,No.3,pp.1-10, 1960
[4]. Newman, J.N., “The Drift Forces and Moments on Ship in Waves”, JSR, Vol. 11, pp.51-60, 1967
[5].Hong,Y.S.,“Computation ofWaveDriftForcesActing on Semi-SubmersiblePlatform”, Proceedings of 5thInternational OMAE Symposium, pp. 304-310, 1986
[8]. Pinkster, J.A., “Low Frequency Second Order Wave Exciting Forces on Floating Structures”,NetherlandsShip ModelBasin,Report 650, 1980
[9].Standing,R.G.,Dacunha,N.M.C.and Matten,R.B.,“Mean WaveDriftForces:Theory and Experiment”,NationalMatitimeInstitute,ReportR124,1981
[10].Balchen,I.G.,N.A.Jenssen and S.Salid,”Dynamic Positioning Using Kalman Filtering and OptimalControlTheory”.IFAC/IFIP Symposium on Automation in OffshoreOil Field Operation, Amsterdam, The Netherlands, pp. 183-186,1976
[11].Balchen,I.G.,N.A.Jenssen,E.Mathisen and S.Salid,“A DynamicPositioning System Based Kalman Filtering and OptimalControl”MIC,Vol.1,No.3,pp.135-163, 1980.
[12].Grimble,M.J.,R.J.Patton and D.A.Wise,“TheDesign ofDynamicShip Positioning Control Systems Using Extended Kalman Filtering Technique,” IEEE Oceans Conference, pp.488-497, 1979.
[13].Antonio,Loria,ThorI.Fossen and ElenaPanteley,“ A Separation PrincipleforDynamic Positioning ofShips:Theoreticaland ExperimentalResults”,IEEE Trans.On Control Systems Technology. Vol.8, No.2, pp.332-343, 2000
[14]. Aalbers, A.B. and Nienhuis U.,“WaveDirection Feed-Forward on Basis of Relative Motion Measurements to Improve Dynamic Positioning Performance,” Offshore Technology conference, Paper 5445, pp. 225-232, 1987.
[15]. Donha, D.C. and Brinati H. L., “Design of Dynamic Semisubmersible Platform Positioning ControlSystem,”OffshoreTechnology Conference,Paper6257,pp.505-514, 1990.
[16]. Girard, A. R. and Hedrick, J. K., “Dynamic Positioning of Ships Using Nonlinear DynamicSurfaceControl,”TheUniversity ofCaliforniaatBerkeley ,Ocean Engineering Graduate Group.
[17].Lee,T.H.,Cao,Y and Lin,Y.M.,“Dynamicpositioning ofdrilling vesselswith a fuzzy logic controller, International Journal of Systems Science, vol. 33, no. 12, pages 979-993, 2002.
[18]. Xia, G., Shi. X., Fu, M., Wang, H and Bian. X., “Design of Dynamic Positioning Systems Using Hybrid CMAC-based PID ControllerforA Ship,”IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada, July 2005.
[19]Liang,C.C.,and W.H.Cheng,“TheOptimalControl of Thruster system for Dynamic Positioned Vessels”,V0l.31,pp.97-110, 2004.
[20].Arora,Jasbir,S.,”Introductin to Optimum Design”McGraw-Hill Book Company, 1989 [21].Hamamoto,M.and Kim,Y.S.,“A new coordinatesystem and theequationsdescribing
maneuvering motion ofaship in waves(in Japanese),”JournaloftheSociety of Naval Architects of Japan, Vol. 173, pp. 209-220, 1993.
[22].Hamamoto,M.,Matsuda,A.,and Ise,Y.,“Ship motion and thedangerouszoneofaship in severe following seas (in Japanese),”Journal of the Society of Naval Architects of Japan, Vol. 175, pp. 69-78, 1994.
[23]. 徐玉樹,順浪中船舶之穩度安全性,國立成功大學造船暨船舶機械工程研究所碩 士論文,民國八十六年。
[24]. 羅志宏,船隻在順波中波向穩定性與運動之分析,國立成功大學造船暨船舶機械 工程研究所碩士論文,民國九十年。
[25]. Salvesen,N.,“Second-Order Steady State Forces and Moments on Surface Ships in ObliqueRegularWaves”,Int.Symp.on DynamicsofMarineVehiclesand Structuresin Waves, Univ. College, London, pp.212-226, 1974.
[26].Newman,J.N.,“TheSecond-Order Time-Average Vertical Force on a Submerged Body Moving Beneath aRegularWaveSystem”,unpublished.1970.
![圖 4-1 洋流與船體座標系統 依據船體所在位置,設定船體所遭遇的潮流作用力。 2 2 cx c G c G cxF =1[(V cos - x ) +(V sin - y ) ]BdC 2 (4-7) 2 2 cy c G c G pp cyF =1[(V cos - x ) +(V sin - y ) ]L dC 2 (4-8) 222 C c G c G pp cnN =1[(V cos - x ) +(V sin - y ) ]L dC 2 ](https://thumb-ap.123doks.com/thumbv2/9libinfo/9002918.288776/10.892.150.738.102.544/=VBdC=LC=V.webp)
![圖 4-10 座標系示意圖 其中 G-xyz 為船體座標系統, O X Y Z 0 0 0 為大地座標系, G x y z 為水平船體座標系。 1 、 1 、 1 為船體的尤拉角,並利用尤拉角表示水平船體座標系與船體座標系之間的 座標轉換,並假設船體為左右對稱的細長體,且船體在運動時的縱搖角度很小。船體重 心六度運動模擬程式係依據這些假設並且參閱文獻[23,24]和 Hamamoto 等人[21,22] 推導的數學模式。有關水平船體座標系下的詳細數學模式推導,可參閱文獻[23]。 船](https://thumb-ap.123doks.com/thumbv2/9libinfo/9002918.288776/17.892.279.615.100.595/與船體座標系之間座標轉換並假設船體為左右對稱體且模式有關水平.webp)