國立臺灣大學工學院機械工程學系 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
彈簧靜平衡機構之能量效率分析 Energy Efficiency Assessment of
Statically Spring-Balanced Articulated Manipulators
楊智涵 Chih-Han Yang
指導教授:陳達仁 博士 Advisor: Dar-Zen Chen, Ph.D.
中華民國 105 年 7 月
July 2016
中文摘要
靜平衡機構係指該機構在重力的影響下,不需要增加任何外力支撐,即可在任 意構型下維持靜力平衡狀態的機構。驅動靜平衡機構只需使用相對較少的致動力,
因此靜平衡機構能提升能源效率並提高系統之最大負載,在應用上有許多優點。
本研究提出用以評估彈簧靜平衡機構之能量效率的方法。透過將重力位能及 彈力位能轉換成矩陣型態,剛性方塊矩陣(stiffness block matrix)能以相同的形式呈 現重力及彈力位能對於機構的影響。彈簧配置矩陣(spring configuration matrix)則指 定了彈簧在靜平衡機構中鄰接的桿件。根據保守能守恆的概念,透過研究重力位能 與彈力位能在剛性方塊矩陣中的相互抵消關係,可以決定彈簧安裝配置參數,如彈 簧鄰接角度,並更進一步得到彈力位能的方向性質。部分與重力位能具有相同方向 性質之彈力位能,對於達成靜平衡目的提供負貢獻;部分與重力位能具有相反方向 性質之彈力位能,對於達成靜平衡目的提供正貢獻。定性效率指標(qualitative efficiency index)被定義為彈力位能正貢獻與總貢獻在剛性方塊矩陣中的數量比例。
在彈簧靜平衡機構之具體質量參數已知的情況下,可以推得重力及彈力位能貢獻 的數值大小以計算定量效率指標(quantitative efficiency index),定義為彈力位能正 貢獻與總貢獻在剛性方塊矩陣中的數值比例。定量效率指標代表彈力位能中實際 上有助於達成靜平衡的比例,其數值越大則靜平衡機構之能量效率越好。本論文中 所提出的效率指標,能協助設計者在機構設計的過程中,利用量化的評估方式找出 具有最佳能量效率的彈簧靜平衡機構。
關鍵詞:彈簧、彈簧配置、靜平衡、能量效率
Abstract
Statically balanced articulated manipulators are mechanisms which are able to self-
balance effects of gravitational force caused by weight of the system itself within the
workspace. Only relatively less actuating force is required to activate statically balanced
mechanisms compared with general mechanisms. Hence, statically balanced mechanisms
have advantages such as energy efficient and easily controlled for applications.
This paper presents a method to assess energy efficiency of statically balanced
articulated manipulators. The gravitational and elastic potential energy is presented in
quadratic form and arranged into the same representation of stiffness block matrices
respectively. The spring configuration matrix specifies the attached links of installed
springs and distribution of elastic potential energy in stiffness block matrix. Based on the
concept of energy conservation and the stiffness block matrix, spring installation
configurations are determined. The direction properties of elastic potential energy are
aligned with or against the gravity can be further obtained. Elastic energy contributions
providing effects aligned with gravity are redundant for static balance and regarded as
negative contributions. Elastic energy contributions counteracting against gravity and
redundant elastic effects are regarded as positive contributions. A qualitative efficiency
elastic energy contributions. Furthermore, in the case that the magnitudes of gravitational
energy contributions are taken into consideration, a quantitative efficiency index can be
defined and proposed as the magnitude ratio of positive elastic energy contributions to
total elastic energy contributions. The quantitative efficiency index indicates the
proportion of elastic energy contributions assisting in static balance. Thus, the higher the
quantitative efficiency index is, the better the energy efficiency the mechanism is. Energy
efficiency of statically balanced articulated manipulators can be assessed according to the
efficiency indexes. A design example is demonstrated to illustrate the practical uses of the
efficiency indexes. The proposed methodology can be adopted to help designers to
compare the energy efficiency among different statically spring-balanced mechanisms
and obtain the most efficient one from energy perspective.
Key words: Spring, Spring configuration, Static balance, Energy efficiency
Contents
Chapter 1 Introduction ... 1
1.1 Background ... 1
1.2 Overview of related works ... 3
1.3 Motivation and preview ... 6
Chapter 2 Stiffness block matrix representation ... 9
2.1 Gravitational stiffness block matrix ... 9
2.2 Property of gravitational stiffness block matrix ... 12
2.3 Elastic stiffness block matrix ... 15
2.4 Property of elastic stiffness block matrix ... 18
Chapter 3 Spring installation configurations ... 22
3.1 Examination of energy counteraction from vector perspective ... 22
3.2 Characteristics for determination of spring installation configurations ... 24
3.3 Determination of spring attachment angles ... 29
Chapter 4 Qualitative efficiency index ... 34
4.1 Identification of energy contributions by spring installation configurations ... 34
4.2 Derivation of qualitative efficiency index ... 36
4.3 Comparison of energy efficiency of each spring ... 39
4.4 Comparison of energy efficiency by qualitative efficiency index ... 40
Chapter 5 Quantitative efficiency index ... 42
5.1 Derivation of quantitative efficiency index ... 42
5.2 Comparison of energy efficiency by quantitative efficiency index ... 48
Chapter 6 Design example ... 52
6.1 Articulated manipulator with equal link mass ... 52
6.2 Articulated manipulator with descending link mass ... 53
Chapter 7 Conclusions ... 58
Reference ... 60
List of Tables
Table 1 Rules for determination of spring attachment angles from admissible spring configuration matrices ... 29 Table 2 Spring installation configurations and qualitative efficiency indexes for four-
link articulated manipulators ... 37 Table 3 Spring installation configurations and qualitative efficiency indexes for five-
link articulated manipulators ... 38 Table 4 Quantitative efficiency index of four-link articulated manipulators ... 47 Table 5 Quantitative efficiency index of five-link articulated manipulators ... 48 Table 6 Quantitative efficiency index of five-link articulated manipulators with
descending link mass ... 55
List of Figures
Fig. 1. Applications for static balance: (a) the angle-poised lamp [2]; (b) the surgical light apparatus [5]; (c) the camera support [3]; (d) the arm supporting device [8];
(e) the lower limb orthosis [6] ... 2
Fig. 2. Spring balancing method with auxiliary linkages to deliver the vertical vectors [16] ... 4
Fig. 3. Spring balancing method with auxiliary linkages to locate the mass center [19] . 4 Fig. 4. Direct spring balancing method by iteratively compensating gravitational effects [22] ... 5
Fig. 5. Coordinate system of an n-link articulated manipulator ... 10
Fig. 6. Spring attached between links i and k of an n-link articulated manipulator ... 16
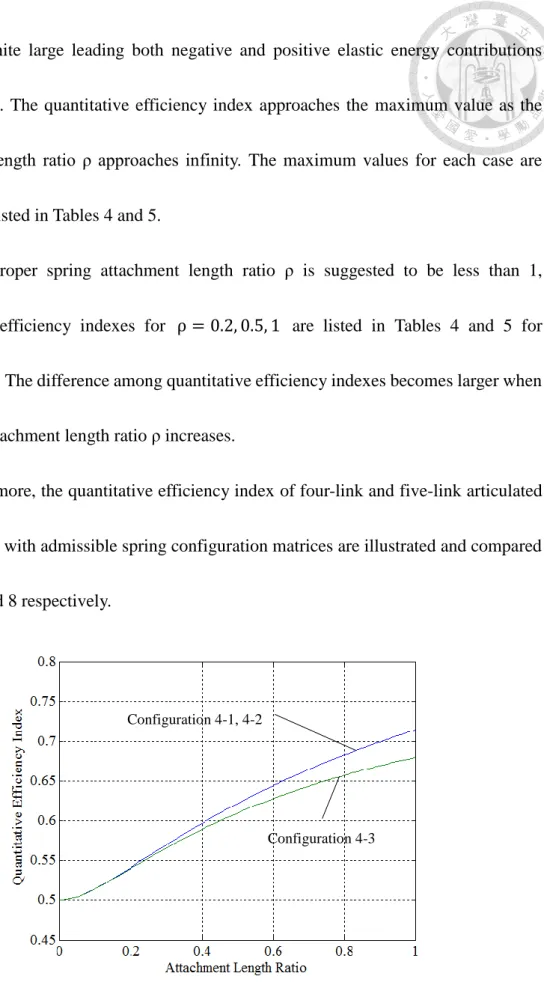
Fig. 7. Quantitative efficiency index of four-link articulated manipulators ... 49
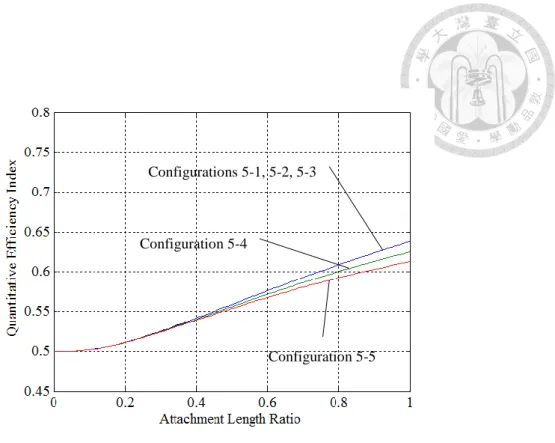
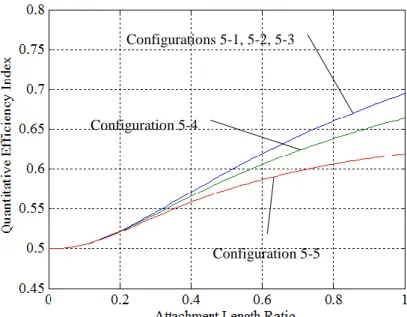
Fig. 8. Quantitative efficiency index of five-link articulated manipulators ... 50
Fig. 9. Quantitative efficiency index of five-link articulated manipulators with descending link mass ... 56
Chapter 1 Introduction
1.1 Background
Apparatuses or manipulators tend to move to the location with lowest gravitational
potential energy in gravitational field. It is necessary to neutralize the gravitational effects
on the mechanisms in many cases. Statically balanced articulated manipulators are
mechanisms capable of self-balancing the gravitational effects caused by weight of the
system itself within the workspace. Hence, statically balanced mechanisms are efficient
and easily controlled for no actuating force is required to sustain the system weight.
Technology and new system designs for static balance have been developed in recent
decades [1], and a wide range of applications have been proposed, such as lamps [2],
camera supports [3], surgical light apparatus [4,5], orthoses, rehabilitation devices for
supporting or training [6-9], statically balanced manipulators and robots [10-13], as
shown in Fig. 1.
(a) (b) (c)
(d) (e)
Fig. 1. Applications for static balance: (a) the angle-poised lamp [2]; (b) the surgical light apparatus [5];
(c) the camera support [3]; (d) the arm supporting device [8]; (e) the lower limb orthosis [6]
Static balance can be achieved by numerous methods such as the joint friction
method, the counterweight method, and the spring method. The counterweight method
requires additional masses to balance the system and may reduce the strength of the
system when the total mass of the system increases [14,15]. The joint friction method
failure of the system may occur as the joint friction decays. The spring method is therefore
considered the most favorable method among numerous methods proposed to achieve
statically balanced condition for the reason that the elastic potential energy requires only
little additional inertia to neutralize the change in gravitational potential energy induced
by the displacement of the manipulators.
1.2 Overview of related works
The concept to satisfy the statically balanced condition is to keep the total
conservative energy constant. That is to say, the gravitational potential energy UG and
the elastic potential energy UE have to compensate the change of each other within the
entire workspace as represented in Eq. (1) where UTotal indicates the total potential
energy.
Total G E
U U U constant (1)
One spring balancing method, as illustrated in Fig. 2 was to install springs with
parallelogram auxiliary mechanisms which delivered the vertical vectors. With the help
of vertical vectors, each link with a parallelogram mechanism on it was independently
balanced by a single spring, and the total potential energy for an n-link manipulator was
kept unchanged [16,17]. Auxiliary parallelogram mechanisms were applied in another
spring balancing method to form a pantograph shape to locate the mass center as shown
in Fig. 3. Springs were attached to the mass centers to keep the total potential energy
balanced [18-20]. However, methods with auxiliary linkages have some disadvantages,
such as additional inertia and interference caused by auxiliary linkages.
Fig. 2. Spring balancing method with auxiliary linkages to deliver the vertical vectors [16]
Fig. 3. Spring balancing method with auxiliary linkages to locate the mass center [19]
By adding ground-attached springs to each link of an n-link manipulator, net force
on each link could be reduced to the form of a virtual spring attached to ground. As shown
in Fig. 4, The manipulator were iteratively balanced without auxiliary linkages [21,22].
However, too many ground-attached springs must be installed, which causes problems
such as installation difficulty of springs and interference in workspace.
Fig. 4. Direct spring balancing method by iteratively compensating gravitational effects [22]
Another spring balancing method was the stiffness block matrix approach [23-25].
Gravitational potential energy and elastic potential energy was transformed into the
matrix form and arranged as the gravitational stiffness block matrix [𝐆𝐮𝐯] and the elastic
stiffness block matrix [𝐊𝐮𝐯𝐢𝐤]. The concept of conservation in Eq. (1) were proved to be
equal to that all off-diagonal entries of the summation of the gravitational and elastic
stiffness block matrix were zero [23,24], represented as Eq. (2) where [𝐓𝐮𝐯] indicated
the total stiffness block matrix.
N diagonal
Tuv Guv
Kikuv (2)Considering the properties of stiffness block matrices, admissible spring
configurations were derived under objectives of minimum number of springs and
minimum span over number of springs [25].
1.3 Motivation and preview
Based on the stiffness block matrix approach, spring attachment angles were
predetermined and discussed before the discussion about criteria of admissible spring
configurations in previous study [25]. However, previous research focused on the location
and configuration of installed springs, valuable insight from the determination of spring
attachment angles for understanding the function and efficiency of elastic energy was not
well described. The properties of stiffness block matrix can be further discussed to
understand the energy efficiency of statically spring-balanced articulated manipulators.
In this study, the spring installation configurations such as the spring attachment
angles and direction properties of elastic energy contributions are discussed based on the
Rules for determination of spring installation configurations are elaborated; therefore, the
spring attachment angles and direction properties of elastic energy contributions can be
found for articulated manipulators with different spring configuration matrices. Elastic
energy contributions are therefore identified to be positive contributions or negative
contributions by their direction properties. Elastic energy contributions providing effects
aligned with gravity are redundant for static balance and regarded as negative
contributions. Elastic energy contributions counteracting against gravity and redundant
elastic effects are regarded as positive contributions. A qualitative efficiency index is
proposed as the number ratio of positive elastic energy contributions to total elastic energy
contributions. Furthermore, in the case that the magnitudes of gravitational energy
contributions are taken into consideration, a quantitative efficiency index is proposed as
the magnitude ratio of positive elastic energy contributions to total elastic energy
contributions. Energy efficiency of an n-link statically spring-balanced articulated
manipulators can be assessed according to the proposed efficiency indexes. Comparisons
among four-link and five-link statically balanced articulated manipulators with different
admissible spring configuration matrices are illustrated respectively. A design example is
demonstrated to highlight the practical uses of the efficiency indexes. The energy
efficiency of statically spring-balanced articulated manipulators can be assessed and
compared during the design processes to help the designer obtained the articulated
manipulator design with minimum energy wastes without trails and errors.
Chapter 2
Stiffness block matrix representation
2.1 Gravitational stiffness block matrix
On the basis of Denavit-Hartenberg representation [26], the coordinate system of the
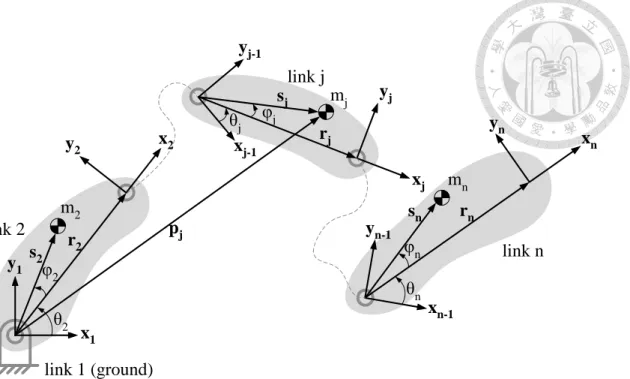
n-link planar articulated manipulator is constructed as shown in Fig. 5. The Cartesian
planar coordinate system is applied on each link. Unit axes x𝐣 and y𝐣 are orthonormal
vectors and axis x𝐣 is aligned on link vector r𝐣. Each succeeding coordinate system with
respect to its preceding coordinate system can be represented by a rotation matrix 𝐑(θj)
[25]. θj is the joint angle from the (j − 1)th coordinate to the jth coordinate frame.
Moreover, θik is defined as the relative angle from the ith coordinate frame to the kth
coordinate frame.
Fig. 5. Coordinate system of an n-link articulated manipulator
Referring to the n-link articulated manipulator as shown in Fig. 5, the position vector
of mass center of link j denoted by 𝐩𝐣 is expressed as Eq. (3):
j-1
w=2
= +
j j w
p s r (3)
where 𝐫𝐰 is the link vector of link w, and 𝐬𝐣 is the vector from the joint of link j to the
mass center of link j. 𝐫𝟏 is defined to be equal to 𝐱𝟏 to keep the symbol consistency in
the following derivations. By expressing each vector as the form of a transformation
matrix times a direction vector [25], the gravitational potential energy denoted by UG is
derived as Eq. (4):
link 1 (ground) link 2
link j
link n
x1
x2 xj-1
xj
xn-1
xn
y1
y2
yj-1
yj
yn-1
yn
θ2
θj
θn φn φj
s2
sj
sn r2
rj
rn m2
mj
mn pj
φ2
n
G j
j=2
U = -
m g p T j (4)where mj represents the mass of link j, and g represents the gravitational acceleration
vector. The gravitational potential energy in Eq. (4) can be arranged as the form of
stiffness block matrix representation [23,25], as shown in Eq. (5):
T
G
U 1 2
1 1
2 2
uv
j j
n n
r r
r r
r G r
r r
(5)
where [𝐆𝐮𝐯] is named the gravitational stiffness block matrix [23,25]. The terms 𝐆𝐮𝐯
in the gravitational stiffness block matrix are named the gravitational energy components,
where subscribes indicating the term is located in the uth row of vth column. Values of
gravitational energy components are expressed as Eq. (6):
v v
v n w w=v+1 vg 270 - m s - m for u = 1, v = 2, 3, ..., n r
0 for u 1
T uv
R R I
G (6)
where R represents the rotation matrix, and I is the 2 × 2 identity matrix. The gravitational stiffness block matrix [𝐆𝐮𝐯] is expressed as a symmetric matrix in which
only upper triangular matrix is considered [23,25], the distribution of gravitational
stiffness block matrix is shown in Eq. (7):
0
0 0
0
12 1v 1n
uv
G G G
G (7)
2.2 Property of gravitational stiffness block matrix
Each non-zero gravitational energy component 𝐆𝟏𝐯 represents the gravitational
energy contribution that acts between ground and link v. Thus, non-zero gravitational
energy components are located only in the first row of the gravitational stiffness block
matrix as expressed in Eq. (7).
Because energy components are mathematically representing planar vector space,
we can rearrange and divide each gravitational energy component into a direction and a
magnitude as expressed in Eq. (8):
mag dir for v = 2, 3, ..., n
1v 1v 1v
G G R G (8)
where dir(𝐆𝟏𝐯) is the direction and mag(𝐆𝟏𝐯) is the magnitude of the gravitational
energy component 𝐆𝟏𝐯. Moreover, the direction and magnitude can be expressed as Eqs.
(9a) and (9b):
v
v v
v
n v
v v w
w=v+1 v
v
m s sin φ
dir arctan r 270
m s cos φ + m
r φ' 270
1v
G (9a)
1
2 n 2 2
v v
v v v v w
w=v+1
v v
s s
mag g m sin φ + m cos φ + m
r r
G1v (9b)
The directions of gravitational energy components are the gravitational direction
270° plus an arctangent angle denoted as φ’v as represented in Eq. (9a). In the case that
the mass center deflection angle φv is not equal to zero, the angle φ’v will not be equal
to zero correspondingly. To be more specifically, the range of φ’v can be discussed
according to some basic assumptions to obtain a general understanding. If all magnitudes of mass center deflection angles |φv| are not greater than 45°, all mass mv are equal
to each other, and all mass center length ratio srv
v are not greater than 0.5, the angle ranges of all φ’v are determined to be between −22.5° and 22.5°. Since the angle ranges of φ’v are not considerable in magnitude, it is found that the directions of all gravitational
energy components dir(𝐆𝟏𝐯) are approximately 270°. On the other hand, the direction
of gravitational energy component dir(𝐆𝟏𝐯) becomes far from 270° only when the link
shape is extremely strange, designed deliberately to make φ’v considerably great in
magnitude.
In this paper, all mass center deflection angles φv are assumed to be zero. In other
words, all mass centers of links are assumed to be exactly on the line through the joints
of links. Under the zero φv assumption, the direction and magnitude of each
gravitational energy component can be simplified as Eqs. (10a) and (10b):
dir G1v 270 (10a)
v v n ww=v+1 v
mag g m s + m
r
G1v (10b)
The direction of every gravitational energy component dir(𝐆𝟏𝐯) is exactly 270°,
as expressed in Eq. (10a), making the discussion in the following sections more clearly
to understand. However, the findings in this study are also valid for the cases with
reasonable mass center deflection angle φv.
The mass center is approximately located in the centroid of each link so that the mass center length ratio srv
v is generally suggested to be less than 1 intuitively. Under the circumstances, the magnitudes of gravitational energy components mag(𝐆𝟏𝐯) are
distinct to each other in a descending order from v = 2 to v = n according to Eq. (9b).
2.3 Elastic stiffness block matrix
For a statically balanced articulated manipulator, a spring configuration matrix [Suv], an n × n matrix, is defined to represent the configuration of installed springs
[24,25]. Only one spring at most is allowed to be attached between two links. The non-
zero element of Suv = # which lies in the uth row of vth column stands for a spring
attached between links u and v. Only the upper triangular spring configuration matrix is
considered because of the symmetry and redundancy [24,25].
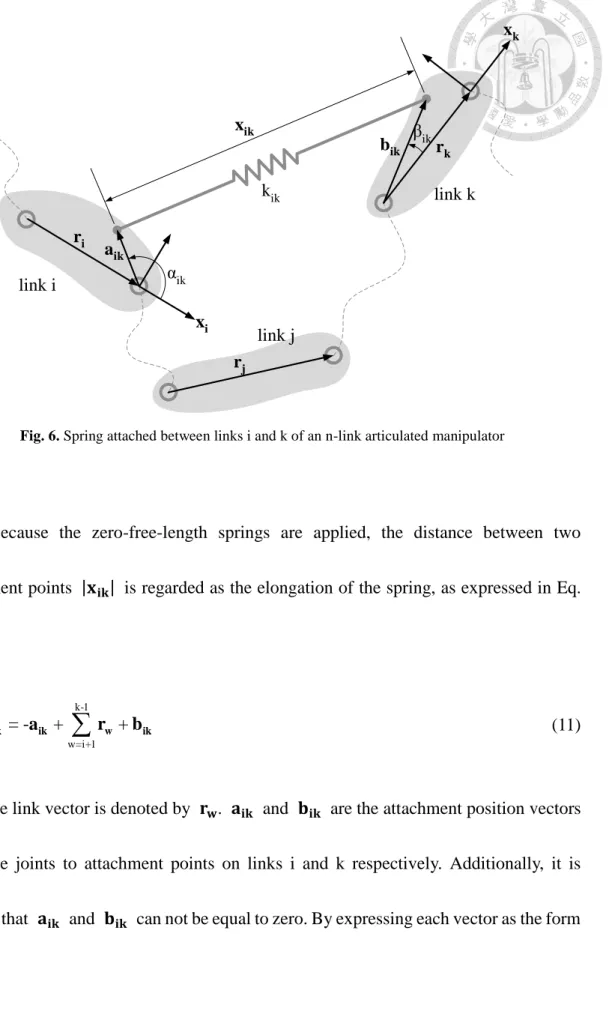
As illustrated in Fig. 6, a spring with spring constant kik attached between links i
and k of an n-link articulated manipulator is denoted by Sik= # in the spring
configuration matrix. Furthermore, since link i is the proximal attached link and link k is
the distal attached link, i is defined to be less than k.
Fig. 6. Spring attached between links i and k of an n-link articulated manipulator
Because the zero-free-length springs are applied, the distance between two attachment points |𝐱𝐢𝐤| is regarded as the elongation of the spring, as expressed in Eq.
(11):
k-1
w=i+1
= - +
+ik ik w ik
x a r b (11)
The link vector is denoted by 𝐫𝐰. 𝐚𝐢𝐤 and 𝐛𝐢𝐤 are the attachment position vectors
from the joints to attachment points on links i and k respectively. Additionally, it is
defined that 𝐚𝐢𝐤 and 𝐛𝐢𝐤 can not be equal to zero. By expressing each vector as the form link i
link j
link k
rj ri
rk
xk
bik βik xik
kik
xi αik aik
of a transformation matrix times a direction vector [25], the elastic potential energy from
spring Sik is denoted by UEik and derived as Eq. (12):
ik
E ik
U = 1k 2
T ik ik
x x (12)
Notice that UE shown in Eq. (1) denotes the elastic potential energy of the whole
system, while UEik represents the elastic potential energy from spring Sik. The elastic
potential energy in Eq. (12) can be arranged as the form of stiffness block matrix
representation as shown in Eq. (13) [23,25]:
T
ik
UE 1 2
1 1
2 2
ik uv
j j
n n
r r
r r
r K r
r r
(13)
where [𝐊𝐮𝐯𝐢𝐤] is named the elastic stiffness block matrix [23,25]. The terms 𝐊𝐮𝐯𝐢𝐤 in the
elastic stiffness block matrix are named the elastic energy components [23,25]. The
superscripts indicate that the term is induced by the spring attached between links i and
k, and the subscripts indicate that the term is located in the uth row of vth column.
Diagonal elastic energy components 𝐊𝐮𝐯𝐢𝐤 with u = v are expressed as Eqs. (14a-
c):
2 ik ik
i 2 ik ik
k
ik
k ar u = v = i (a)
k b u = v = k (b)
r
u = v = i+ 1, , k- 1 (c) k
ik uv
I
K I
I
(14)
Off-diagonal elastic energy components 𝐊𝐮𝐯𝐢𝐤 with u ≠ v are expressed as Eqs.
(15a-d):
ik
ik ik
i ik
ik ik
k ik ik
ik ik ik
i k
ik
a u i; v i 1, , k - 1 (a)
k 180 -
r
b u i 1, , k - 1; v k (b)
k r
a b
u i; v k (c)
k 180 -
r r
u, v i 1, , k - 1 (d)
k 0
ik p
ik ik D
uv
ik L
ik S
R K
R K
K
R K
R K
(15)
where αik and βik are the proximal and distal attachment angles respectively; arik
i and
bik
rk are the proximal and distal attachment length ratios respectively.
2.4 Property of elastic stiffness block matrix
Energy components are mathematically representing planar vector space, and can
therefore be divided into a direction and a magnitude. Notice that the representation of
elastic energy components expressed in Eqs. (14a-c) and (15a-d) are already divided into
a direction and a magnitude as the form shown in Eq. (16):
mag dir
ik ik ik
uv uv uv
K K R K (16)
Each non-zero elastic energy component 𝐊𝐮𝐯𝐢𝐤 stands for the elastic energy
contribution that acts between links u and v caused by the spring attached between links i and k (Sik).
The change of the relative angle θuv causes an energy variation of 𝐫𝐮𝐓𝐊𝐮𝐯𝐢𝐤𝐫𝐯.
Therefore, the elastic energy contribution from the diagonal elastic energy component 𝐊𝐮𝐯𝐢𝐤 with u = v does not vary when the relative position of links change, since the
relative angle θuv with u = v is always zero. That is to say, the diagonal energy
components in Eq. (14a-c) are irrelevant to statically balanced condition; therefore, only
off-diagonal energy components are considered during the discussion about static balance.
The total number of off-diagonal elastic energy components for the spring attached
between links i and k is determined to be (k−i+1)(k−i)
2 , and is regarded as the number of total elastic energy contributions. The number of total elastic energy contributions are
listed in Tables 2 and 3 respectively for the four-link and five-link articulated
manipulators with the spring configuration matrices assessed in this study. Intuitively, the
number of total elastic energy contributions should be as little as possible for the reason
that springs with less number of total contributions are less complicated in the form of
energy performance, leading the possible energy waste less likely to occur. Thus, the
examples demonstrated in this study shown in Tables 2 to 5 are ordered ascendingly by
the number of total elastic energy contributions as a brief guess that the less the number
of total contributions is, the more efficient the articulated manipulator is.
Off-diagonal elastic energy components are denoted by the symbol 𝐊𝐮𝐯𝐢𝐤 with
different subscripts according to the locations. However, only four distinct values exist
among them. It is confusing when symbols with different subscripts are representing the
same value. Therefore, the denotations of off-diagonal elastic energy components are
further simplified as 𝐊𝐏𝐢𝐤, 𝐊𝐃𝐢𝐤, 𝐊𝐋𝐢𝐤, 𝐊𝐒𝐢𝐤.
Elastic energy components dominated by the proximal installation configurations
aik
ri and αik of the spring are called the proximal elastic energy components, denoted as 𝐊𝐏𝐢𝐤 shown in Eq. (15a). All the proximal elastic energy components 𝐊𝐏𝐢𝐤 are located in
the ith row. Elastic energy components dominated by the distal installation
configurations brik
k and βik of the spring are called the distal elastic energy components, denoted as 𝐊𝐃𝐢𝐤 shown in Eq. (15b). All the distal elastic energy components 𝐊𝐃𝐢𝐤 are
located in the kth column. Elastic energy component dominated by both proximal and
distal installation configurations arik
i, αik, brik
k and βik of the spring is called the leading elastic energy component, denoted as 𝐊𝐋𝐢𝐤 shown in Eq. (15c). The leading elastic energy
𝐢𝐤 th th
with value kik𝐑(0°) are called the side effect elastic energy components, denoted as 𝐊𝐒𝐢𝐤 expressed in Eq. (15d). All the side effect elastic energy components 𝐊𝐒𝐢𝐤 are
located in the (i + 1)th to (k − 1)th rows of (i + 1)th to (k − 1)th columns,
directions of which are all 0°. Side effect elastic energy components 𝐊𝐒𝐢𝐤 are considered
troublesome and needed to be balanced by other springs.
The distribution of elastic stiffness matrix [𝐊𝐮𝐯𝐢𝐤] is expressed in Eq. (17):
0 0 0 0 0 0 0
0 0 0 0 0 0
ik ik ik ik ik
uv P P P L
ik ik ik ik
uv S S D
ik ik ik ik
uv uv S D
ik ik
uv D
ik uv
K K K K K
K K K K
K K K K
K K
K
(17)
Only the upper triangular matrix is considered since the 𝐊𝐯𝐮𝐢𝐤 is the transpose of 𝐊𝐮𝐯𝐢𝐤 [23,25].
Chapter 3
Spring installation configurations
3.1 Examination of energy counteraction from vector perspective
For four-link and five-link articulated manipulators, admissible spring configuration
matrices under the objective of minimum span over number of springs [25] are listed in
Tables 2 and 3 respectively. Starting from an admissible spring configuration matrix, the
energy contributions in the total stiffness block matrix of a specific spring configuration
can be presented according to the definition of gravitational and elastic stiffness block
matrix shown in Eqs. (7) and (17).
For example, starting from the spring configuration matrix 5-4 shown in Table 3,
following the definition of gravitational and elastic stiffness block matrix shown in Eqs.
(7) and (17), the energy contributions in the total stiffness block matrix can be expressed
as shown below in Eq. (18):
N
ik
uv uv
15 14 12 15 14 15 14 15
12 P P L 13 P P 14 P L 15 L
15 25 14 23 15 25 14 15 25
S P S L S P D D L
15 25 14 15 25
S S D D D
15 25
D D
G K
* G + K + K + K G + K + K G + K + K G + K
* K + K + K + K K + K + K K + K
* K + K + K K + K
* K + K
*
(18)
Once the distribution of the total stiffness block matrix is acquired, equations derived
from the entries of total stiffness block matrix can be obtained according to the fact that
summation of energy components in the same entry equal to zero.
Energy components are 2 × 2 matrices which consist of four terms for each of them,
so the fact that summation of energy components in the same entry equal to zero ought to
provide four linear equations. However, only two out of the four linear equations are
independent because both gravitational and elastic energy components are
mathematically representing planar vector space which consist of only two independent
variables, directions and magnitudes. By dividing each energy component into a direction
and a magnitude as expressed in Eqs. (8) and (16), the general knowledge of vector
operations can be applied throughout the study.
Thus, it is much easier to understand the philosophy of the neutralization among
energy components for static balancing if each energy component is considered as a
vector; while it is more compact to present the whole system in matrix form. By
examination of the total stiffness block matrix, which expresses the counteraction
between gravitational and elastic potential energy, the spring attachment angles are found
to be determined according to some specific rules.
3.2 Characteristics for determination of spring installation configurations
First of all, only energy components 𝐆𝟏𝐧 and 𝐊𝐋𝟏𝐧 exist in entry 1n for every
admissible spring configuration. Since the sum of 𝐆𝟏𝐧 and 𝐊𝐋𝟏𝐧 is equal to zero to
achieve static balance, 𝐊𝐋𝟏𝐧 must have the opposite direction and the equal magnitude
compared with 𝐆𝟏𝐧. On account of the direction property of gravitational energy
components, rule 1 can be derived as shown in Table 1: for the spring attached between ground and end link (S1n), the attachment angle β1n− α1n must be 270°.
If no spring is attached between link 3 and end link, Eqs. (19a) and (19b) can be
obtained considering the neutralization within entry 2n and entry 3n. Therefore, for the spring attached between link 2 and end link (S2n), 𝐊𝐋𝟐𝐧 must be equal to 𝐊𝐃𝟐𝐧 to keep
both Eqs. (19a) and (19b) satisfied; hence, the attachment angle α2n must be 180° and
attachment length ratios ar2n
2 must be 1 to keep 𝐊𝐋𝟐𝐧 and 𝐊𝐃𝟐𝐧 equal. Therefore, rule 2 can be obtained as shown in Table 1.
0
1n 2n
D L
K K (19a)
0
1n 2n
D D
K K (19b)
General equations based on the neutralization within entries 1(k+1), 1k and 1(k-1)
derived by subtracting Eq. (20a) from Eq. (20b). For a spring attached between ground and link k (S1k), if no spring or only spring whose direction of energy components
𝐊𝐏𝟏(𝐤+𝟏)− 𝐊𝐋𝟏(𝐤+𝟏) equals to 270° is attached between ground and link (k+1),
considering Eq. (20d) on account of the direction property and magnitude property of
gravitational energy components, it is required that the direction of energy component 𝐊𝐋𝟏𝐤 must be 90° to keep entry 1k balanced because the direction of the summation of
all the other energy components in Eq. (20d) is 270°. Therefore, the attachment angle β1k− α1k for S1k must be 270°. Rule 3 shown in Table 1 is obtained accordingly.
n
v=k+2
1v 1(k+1) 01(k+1) P L
G K K (20a)
n
v=k+1
1v 1k 01k P L
G K K (20b)
n
v=k
1v 1(k-1) 01(k-1) P L
G K K (20c)
G1k G1(k+1)
K1(k+1)P K1(k+1)L
K1kL 0 (20d)
G1(k-1) G1k
K1kP K1kL
K1(k-1)L 0 (20e)Eq. (20e) can be derived by subtracting Eq. (20b) from Eq. (20c). For a spring attached between ground and link k (S1k), if no spring or only spring with attachment
angle β1(k−1)− α1(k−1) = 90° is attached between ground and link (k-1), considering
Eq. (20e) on account of the direction property and magnitude property of gravitational
energy components, the direction of energy components 𝐊𝐏𝟏𝐤− 𝐊𝐋𝟏𝐤 must be 90° to
keep entry 1k balanced because the direction of the summation of all the other energy
components in Eq. (20e) is 270°. Therefore, rule 4 can be obtained as shown in Table 1.
It is noticed that rule 4 does not provide direct constraints on spring attachment angles
and only gives a relationship between elastic energy components. Nevertheless this
relationship is useful for the determination of spring attachment angles, if other
constraints are considered at the same time. For example, if rules 3 and 4 are applied to a
spring S1k at the same time, the attachment angle β1k− α1k must be 270° according
to rule 3; the attachment angle α1k must be 90° according to the constraints provided
by both rules 3 and 4. Another example is that if rules 4 and 5 are applied to a spring S1k
at the same time, the attachment angle β1k must be 180° according to rule 5; the
attachment angle α1k must be 90° according to the constraints provided by both rules
4 and 5.
Considering the neutralization within an arbitrary entry ik with i ≠ 1 and k ≠ n, all springs attached between links u and v (Suv) for 1 ≤ u ≤ i − 1 and k + 1 ≤ v ≤ n
elastic energy components are inevitably to be 0° as mentioned in the aforementioned
section shown in Eq. (15d). Hence, to neutralize these 0° direction energy components
in entry ik, the direction of the summation of all the following elastic energy components
contributed to entry ik must be 180°: the leading elastic energy components from springs
attached between links i and k, the proximal elastic energy components from springs
attached between links i and v for each k + 1 ≤ v ≤ n, and the distal elastic energy
components from springs attached between links u and k for each 1 ≤ u ≤ i − 1. Thus,
some of the spring attachment angles can be determined in order to neutralize the 0°
direction energy components caused by other springs.
A spring attached between links i and k (Sik) with k − i ≥ 2 must contribute its
distal elastic energy component as a 180° direction energy component to balance the
entry (i+1)k, if no spring or only springs with attachment angle βuk = 0° are attached
between links u and k for each 1 ≤ u ≤ i − 1, and if no spring or only springs with
attachment angle α(i+1)v = 180° are attached between links (i+1) and v for each k + 1 ≤ v ≤ n, and if no spring or only spring with attachment angle β(i+1)k− α(i+1)k =
180° is attached between links (i+1) and k. Therefore, the attachment angle βik for Sik
must be 180° and rule 5 is obtained in Table 1 accordingly.
A spring attached between links i and k (Sik) with k − i ≥ 2 and i ≠ 1 must
contribute its proximal elastic energy component as a 180° direction energy component
to balance the entry i(k-1), if no spring or only springs with attachment angle αiv= 180°
are attached between links i and v for each k + 1 ≤ v ≤ n, and if no spring or only
springs with attachment angle βu(k−1) = 0° are attached between links u and (k-1) for
each 1 ≤ u ≤ i − 1, and if no spring or only spring with attachment angle βi(k−1)− αi(k−1) = 180° is attached between links i and (k-1). Hence, the attachment angle αik
for Sik must be 0° as rule 6 describes shown in Table 1.
A spring attached between links i and k (Sik) with i ≠ 1 must contribute its leading
elastic energy component as a 180° direction energy component to balance the entry ik,
if no spring or only springs with attachment angle αiv= 180° are attached between links
i and v for each k + 1 ≤ v ≤ n, and if no spring or only springs with attachment angle βuk = 0° are attached between links u and k for each 1 ≤ u ≤ i − 1 .Thus, the
attachment angle βik− αik for Sik must be 0°, and rule 7 can be obtained accordingly
as described in Table 1.
Table 1
Rules for determination of spring attachment angles from admissible spring configuration matrices
3.3 Determination of spring attachment angles
The determination of spring attachment angles following the rules described in the
aforementioned section is demonstrated in this section.
First of all, rule 1 is always valid for any admissible spring configuration, because the spring attached between ground and end link (S1n) is the only spring able to neutralize
the gravitational energy contribution in entry 1n. It is determined that the attachment
angle β1n− α1n is equal to 270° according to rule 1. Then, based on the requirement
described in rule 2, if no spring is attached between link 3 and end link, for the spring attached between link 2 and end link (S2n), it is determined that the attachment angle α2n
is equal to 180° according to rule 2. Take the spring configuration matrix 5-4 as an
example, it is determined that the attachment angle β15− α15 is equal to 270° for S15
according to rule 1, and that the attachment angle α25 is equal to 180° for S25
according to rule 2.
Based on rule 5, for each spring attached between ground and link k (S1k) where
2 ≤ k ≤ n, if no spring attached between links 2 and v for k ≤ v ≤ n contributes an
energy component with 180° direction to entry 2k, the sufficient condition of rule 5 is
satisfied for the spring S1k. Therefore, the spring S1k is in charge of contributing an
energy component with 180° direction to entry 2k and the attachment angle β1k is
determined to be 180° according to rule 5. Take the spring configuration matrix 5-4 as
an example, because no spring is attached between links 2 and 4 and the attachment angle α25 is 180° for the spring attached between links 2 and 5 according to rule 2. It is
determined that the attachment angle β14 is equal to 180° for S14 according to rule 5.
In accordance with rule 3, if S1k = # and S1(k+1) = 0 in the first row of spring
configuration matrix, it is determined that the attachment angle β1k− α1k is equal to 270° for S1k. After the attachment angles of spring S1k is determined, in the case that
S1(k−1) = #, it is determined that the attachment angle β1(k−1)− α1(k−1) is equal to
270° for S1(k−1) if the direction of energy components 𝐊𝐏𝟏𝐤− 𝐊𝐋𝟏𝐤 is equal to 270°
for S1k according to rule 3. Likewise, in the case that S1(k−2)= #, S1(k−3) = #, and so
according to rule 3. Take the spring configuration matrix 5-4 as an example, because no
spring is attached between ground and link 3, it is determined that attachment angle β12− α12 is equal to 270° for S12 according to rule 3.
On the basis of rule 4, if S1k = # and S1(k−1) = 0 in the first row of spring
configuration matrix, it is determined that the direction of energy components 𝐊𝐏𝟏𝐤− 𝐊𝐋𝟏𝐤 must be 90° for S1k. After the attachment angles of S1k is determined, in the case
that S1(k+1) = #, it is determined that the direction of energy components 𝐊𝐏𝟏(𝐤+𝟏)− 𝐊𝐋𝟏(𝐤+𝟏) must be 90° for S1(k+1) if the attachment angle β1k− α1k is equal to 90°
for S1k according to rule 4. Likewise, in the case that S1(k+2)= #, S1(k+3) = #, and so
on, attachment angles can be determined iteratively if the requirements are achieved
according to rule 4. Take the spring configuration matrix 5-4 as an example, because no
spring is attached between ground and link 3, it is determined that the direction of energy
components 𝐊𝐏𝟏𝟒− 𝐊𝐋𝟏𝟒 must be 90° for S14 according to rule 4. Combined with the
fact that the attachment angle β14 is equal to 180° for S14 according to rule 5, the
attachment angle α14 is determined to be 90° accordingly. Iteratively, it is determined
that the direction of energy components 𝐊𝐏𝟏𝟓− 𝐊𝐋𝟏𝟓 must be 90° for S15 according to
rule 4 because the attachment angle β14− α14 is equal to 90° for S14. Combined with
the fact that the attachment angle β15− α15 is equal to 270° for S15 according to rule
1, the attachment angle α15 is determined to be 90° accordingly.
To ensure that the neutralization is accomplished for every entry in the non-first rows
of the total stiffness block matrix, at least one energy component with 180° direction
must be contributed to each entry in the non-first rows. Hence, for every the non-zero
element in the spring configuration matrix, the requirements according to rules 5, 6 and
7 have to be examined, starting from springs with larger span over number k − i to those
with smaller span over number.
If a spring attached between links i and k (Sik) is the only spring able to contribute
an energy component with 180° direction to entry (i+1)k, it is determined that the
attachment angle βik is equal to 180° for Sik according to rule 5. If a spring attached between links i and k (Sik) is the only spring able to contribute an energy component with
180° direction to entry i(k-1), it is determined that the attachment angle αik is equal to
0° for Sik according to rule 6. If a spring attached between links i and k (Sik) is the only
spring able to contribute an energy component with 180° direction to entry ik, it is
determined that the attachment angle βik− αik is equal to 0° for Sik according to rule
7. Take the spring configuration matrix 5-4 as an example, it is determined that the
β 180° for S
attachment angle β25− α25 has to be 0° for S25 according to rule 7, and that the
attachment angle β23− α23 has to be 0° for S23 according to rule 7.
Chapter 4
Qualitative efficiency index
4.1 Identification of energy contributions by spring installation configurations
Attachment angles of installed springs are determined dependent on the spring
configuration matrix. Moreover, for a spring configuration under the objective of
minimum span over number of springs [25], all spring attachment angles must be
determined according to the described rules because the design parameters of springs are
just enough to satisfy the constraint equations derived from the total stiffness block matrix.
Therefore, the spring attachment angles are not arbitrary choices but determined values
when the spring configuration matrix is selected. That is to say, we can select an
admissible spring configuration matrix and determine the attachment angles of installed
springs by examining the counteraction between gravitational and elastic potential energy
expressed in the total stiffness block matrix.
The direction properties of elastic energy components are also determined
simultaneously. For the elastic energy contributions in the first row, contributions with 270° direction are providing effects aligned with gravity and identified as negative
contributions which are harmful for static balance; elastic energy contributions with 90°
which are beneficial for static balance. For the elastic energy contributions in the non-
first rows, contributions with 0° direction are redundant spring side effects which are
undesired for static balance and identified as negative contributions; elastic energy
contributions with 180° direction are counteracting against spring side effects and
identified as positive contributions.
Take the articulated manipulator with spring configuration matrix 5-4 as the example,
attachment angles of spring S14 are α14= 90° and β14 = 180° as described in Table
3. The direction of the proximal elastic energy component 𝐊𝐏𝟏𝟒 is 90° according to Eq.
(15a); therefore, 𝐊𝐏𝟏𝟒 is a positive contribution. Likewise, the distal elastic energy
component 𝐊𝐃𝟏𝟒 is a positive contribution with 180° direction according to Eq. (15b);
the leading elastic energy component 𝐊𝐋𝟏𝟒 is a negative contribution with 270°
direction according to Eq. (15c); the side effect elastic energy component 𝐊𝐒𝟏𝟒 is a
negative contribution with 0° direction according to Eq. (15d).
The distribution of total stiffness block matrix can be rearranged as the form
expressed below in Eq. (21) where the positive contributions are placed in the right side
and the negative contributions are placed in the left side.
![Fig. 1. Applications for static balance: (a) the angle-poised lamp [2]; (b) the surgical light apparatus [5];](https://thumb-ap.123doks.com/thumbv2/9libinfo/9600007.628747/9.892.171.783.118.807/applications-static-balance-angle-poised-surgical-light-apparatus.webp)
![Fig. 2. Spring balancing method with auxiliary linkages to deliver the vertical vectors [16]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9600007.628747/11.892.284.608.366.1014/spring-balancing-method-auxiliary-linkages-deliver-vertical-vectors.webp)
![Fig. 4. Direct spring balancing method by iteratively compensating gravitational effects [22]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9600007.628747/12.892.303.583.412.684/direct-spring-balancing-method-iteratively-compensating-gravitational-effects.webp)