NCDR 103-T28
103 年大規模崩塌災害防治技術與 防災地圖建置
NCDR 103-T28
103 年大規模崩塌災害防治技術與 防災地圖建置
張志新、劉哲欣、林聖琪、吳亭燁、林忠義、劉嘉騏、鳳雷 蕭玲鳳、廖泰杉、陳銘福、賴君怡、陳佑杰、黃泰綸、陳怡如
中文摘要
本整合計畫共分為三個部分,分別為儀器科技研究中心之「崩塌 災害評估儀器與預警系統技術發展」、台灣颱風洪水研究中心之「山 區定量降雨短時預報技術與預報系統」、以及國家災害防救科技中心 之「大規模崩塌災害防治技術與推動策略研擬」的研究課題。
本年度的技術研發主要包括三個部分,監測、降雨預測、以及風 險地圖的產製等。首先,監測技術的研發在於提升資料傳輸、資料分 析與取得等,成果包括坡地多點感測器模組與通信架構系統可行性技 術發展、坡地崩塌區域之快速取像評估系統開發、以及坡地崩塌近景 觀測系統之演算法分析與整合等。降雨預測則是提供更高精度及更短 預測區間之降雨資料,成果包括雷達資料同化研究成果與改進,以及 極短時定量降雨預報作業化版本等。最後,防災地圖的產製,綜合災 害歷史紀錄蒐整與分析,並以示範區域進行大規模崩塌潛勢區防災地 圖製作,和災害防治推動策略研擬等。
關鍵詞:儀器、近景、雷達資料同化、定量降雨預報、大規模崩塌、
防災地圖。
ABSTRACT
This research includes three parts, which are 1) Development of Assessment Instrument and Early Warning System of Collapse Disaster prevention, by Instrument Technology Research Center, ITRC, 2) very short range quantitative precipitation forecast technique and forecast system for the mountain area by Taiwan Typhoon and Flood Research Institute, TTFRI, 3) Promotion on landslide disaster prevention and risk map technology, by National Science and Technology Center for Disaster Reduction, NCDR.
The important achievements in this year are key references for large-scale landslide disaster prevention work, including technology of monitoring, rainfall forecasting, and risk map production. First, the monitoring technology provides improvements on data communication and image acquirement and analysis, such as evaluation of slope multi-sensor modules and communication system, fast imager identification system in slope collapse area, and real-time close-range image monitor for potential slope collapse region. The rainfall forecasting technology mainly increases resolution and period of forecasting, including radar data assimilation operational version, and short-term quantitative precipitation forecast. Finally, the risk map production technology includes database for large-scale landslide disasters,
quantitative precipitation forecast, large-scale landslide, risk map
目錄
第一章 前言... 1
第二章 崩塌災害評估儀器與預警系統技術發展 ... 3
2.1 坡地多點感測器模組與通信架構系統可行性技術發展 ... 3
2.1.1 節點系統架構 ... 6
2.1.2 實作與結論 ... 12
2.2 坡地崩塌區域之快速取像評估系統開發 ... 16
2.3 坡地崩塌近景觀測系統之演算法分析與整合 ... 24
2.3.1 表面模型重建流程與方法 ... 26
2.3.2 地形變遷分析結果 ... 33
2.3.3 近景觀測系統故障後更新維修與整合 ... 35
第三章 山區定量降雨短時預報技術與系統 ... 39
3.1 雷達資料同化研究成果與改進 ... 39
3.1.1 系集實驗成果比較 ... 39
3.1.2 雷達資料同化技術與策略的改進 ... 39
3.2 極短時定量降雨預報作業化版本 ... 44
4.1.1 建立歷史重大崩塌災害蒐整機制 ... 49
4.1.2 大規模崩塌基本資料蒐集 ... 53
4.2 大規模崩塌潛勢區防災地圖製作之示範 ... 56
4.2.1 災害防救相關地圖種類 ... 56
4.2.2 防災地圖圖元種類 ... 60
4.2.3 地圖使用者 ... 61
4.2.4 資料來源與展示比例尺 ... 62
4.2.5 防災地圖製作流程 ... 65
4.2.6 案例示範區操作 ... 70
4.2.7 結論 ... 89
4.3 大規模崩塌災害防治推動策略研擬 ... 90
4.3.1 大規模崩塌災害論壇暨研發成果研討會 ... 95
4.3.2 大規模崩塌災害防治行動綱領 ... 98
4.3.3 103 年莫拉克重建區潛在大規模崩塌地區訪視 ... 101
第五章 結論與建議 ... 110
5.1 崩塌災害評估儀器與預警系統技術發展 ... 110
圖目錄
圖 1.1 應科方案「大規模崩塌災害防治」研發技術里程圖 ... 2
圖 2.1 節點系統架構圖 ... 5
圖 2.2 節點系統架構圖 ... 7
圖 2.3 使用者介面 ... 11
圖 2.4 實驗實體 ... 13
圖 2.5 實驗一的實驗環境示意圖 ... 13
圖 2.6 資料接收站接收的封包成功率與總接收筆數分析圖 ... 14
圖 2.7 各節點網路連結更換次數與傳輸成功率 ... 15
圖 2.8 溫度與濕度變化資料 ... 16
圖 2.9 第一代快速取像系統 ... 17
圖 2.10 第一代快速取像系統重落地損毀 ... 18
圖 2.11 第一代與第二代取像系統大小比較 ... 19
圖 2.12 近紅外改裝 ... 21
圖 2.13 光譜圖... 22
圖 2.14 自穩式兩軸穩定雲台 ... 23
圖 2.18 相機率定獲取多交會幾何影像示意圖 ... 28
圖 2.19 原始影像與雲霧去除影像之對照 ... 29
圖 2.20 以 SURF 法進行立體對影像特徵匹配之成果 ... 29
圖 2.21 核影像轉換示意圖 ... 31
圖 2.22 原始與核影像立體對 ... 31
圖 2.23 原始視差與空間內差後之視差影像 ... 32
圖 2.24 三維視圖之深度影像 ... 33
圖 2.25 上視圖... 33
圖 2.26 前後兩期之核影像立體對 ... 34
圖 2.27 前後兩期之視差圖 ... 34
圖 2.28 崩塌地區地形變化 ... 35
圖 2.29 新視角立體像對 ... 36
圖 2.30 大範圍崩塌之三維模型 ... 37
圖 2.31 三維模型上視圖 ... 37
圖 2.32 近景觀測系統與嵌入式系統整合 ... 38
圖 3.1TAPEX 實驗平台 2013 年有無雷達資料同化結果之比較 ... 39
圖 3.4 凡那比颱風個案,在不同模式解析度下降雨預報結果 ... 41
圖 3.5 使用不同背景場誤差變異矩陣之同化分析增量比較圖 ... 42
圖 3.6 不同快速循環同化策略測試方案示意圖 ... 43
圖 3.7 不同快速循環同化策略同化雷達資料後之時雨量預報圖 ... 44
圖 3.8 修正之雷達資料同化策略方案設計示意圖 ... 45
圖 3.9 小林村區域與模式網格相關位置示意圖 ... 45
圖 3.10 蘇花公路段流域集水區與模式校驗區域示意圖 ... 46
圖 3.11 所有個案有無雷達資料同化之降雨預報,平均模式預報得分 比較圖 ... 47
圖 4.1 各中心整合與分工架構 ... 49
圖 4.2 NCDR 坡地災害資料災點位置 ... 50
圖 4.3 國科會整理臺灣早期(1967~1992) 251 處重大崩塌點位 ... 50
圖 4.4 水保局重大土石災情彙整格式 ... 52
圖 4.5 地調所山崩災害歷史資料庫 ... 53
圖 4.6 地調所非莫拉克受災地區潛在大規模崩塌地區圖資 ... 54
圖 4.7 示範區位置圖 ... 56
圖 4.8 崩塌災害風險地圖圖元種類 ... 61
圖 4.11 大武地區大規模滑動塊體範圍(緊鄰聚落上方之黑色線範圍
內) ... 69
圖 4.12 邊坡穩定分析結果與警戒區劃設結果 ... 72
圖 4.13 現地調查與徵兆位置圖 ... 74
圖 4.14 地表徵兆與 NGRB 影像比較圖 ... 75
圖 4.15 文峰聚落現勘調查後地形地貌圖劃設結果 ... 76
圖 4.16 文峰聚落防災地圖 ... 78
圖 4.18 現地調查與徵兆位置圖 ... 81
圖 4.19 大武聚落現勘調查後地形地貌圖劃設結果 ... 82
圖 4.20 大武聚落防災地圖 ... 84
圖 4.21 警戒區劃設結果 ... 85
圖 4.22 現地調查與徵兆位置圖 ... 86
圖 4.23 小林二村聚落現勘調查後地形地貌圖劃設結果 ... 87
圖 4.24 小林聚落防災地圖 ... 88
圖 4.25 大規模崩塌災害防治分析尺度(國家災害防救科技中心,2012) ... 90
圖 4.26 大規模崩塌災害防治分析尺度示意圖 ... 91
照 4.4 會中來賓發言提問 ... 97 圖 4.27 行動綱領三大面向及九大策略示意圖 ... 98 圖 4.28 現階段與下階段(中、長期)重點工作流程 ... 100
表目錄
表 2.1 實驗平台軟硬體對照表 ... 13
表 2.2 鏡頭規格比較表 ... 20
表 2.3 紅外線濾鏡規格表 ... 22
表 2.4 四波段快速取像系統比較表 ... 24
表 2.5 更新後之相機內方位參數 ... 36
表 4.1 臺灣早期 251 處重大崩塌災害統計 ... 51
表 4.2 年度各部會在大規模崩塌領域具體成果產出(災防科技中心彙 整) ... 55
表 4.3 災害潛勢資料彙整表 ... 65
表 4.4 崩塌影響(警戒)區域經驗法則畫設比較表 ... 68
表 4.5 經驗法則警戒區範圍彙整表 ... 72
表 4.6 大武聚落警戒區畫設參數彙整表 ... 79
表 4.7 小林二村聚落警戒區畫設參數彙整表 ... 85
表 4.8 大規模崩塌災害防治工作推動歷程重要紀實 ... 91
表 4.9 歷次專家座談會重要結論 ... 93
表 4.13 臺東縣大武鄉大鳥村「大鳥聚落」現地訪視說明表 ... 103 表 4.14 臺東縣卑南鄉東興村「東園三街住戶」現地訪視說明表 .. 104 表 4.15 臺東縣鹿野鄉「瑞豐村住戶」現地訪視說明表 ... 105 表 4.16 南投縣仁愛鄉大同村「定遠新村聚落」現地訪視說明表 .. 106 表 4.17 南投縣仁愛鄉大同村「忠孝新村聚落」現地訪視說明表 .. 107 表 4.18 南投縣仁愛鄉大同村「忠孝新村聚落」現地訪視說明表 .. 108 表 4.19 南投縣廬山溫泉北坡監測系統現地訪視說明表 ... 109
第一章 前言
本期(100 至 103 年)行政院災害防救應用科技方案(以下簡稱 應科方案)所擬定之「大規模崩塌災害防治科技」研發技術里程,涵 蓋了發展技術、推動時程,以及工作目標等三大部分(如圖 1.1)。在 發展技術內容的第一階段,是以基礎資料調查為主,工作內容包含 了,(1)歷史災害、潛勢區與保全對象等基礎資料調查,以及(2)
建置潛勢資料等兩個項目。工作目標則以公開災害潛勢,避免災害重 複發生,或不當之土地利用為主。第二階段為警戒模式開發,工作內 容包含了,(1)潛勢評估技術,與(2)降雨引致崩塌預警技術等兩 個項目。工作目標為建立崩塌潛勢評估與警戒技術,以及提昇災害防 治效能。第三階段為災害管理操作,工作內容包含了,(1)建立大規 模崩塌管理作業機制,(2)潛勢區域監測技術研發,以及(3)防災 地圖製作技術與推廣等三個項目。工作目標為建立防災地圖,以及推 動社區自主防災。透過三個階段整合之技術研發成果,期望能提供未 來國內面對大規模崩塌災害防減災之工作參考。
本計畫遵循著應科方案「目標與整體架構」之規劃內容,將三個 研究中心之研究課題予以整合,進行技術之研發。共包含了,(1)國 家實驗研究院儀器科技研究中心之「崩塌災害評估儀器與預警系統技 術發展」研究課題,(2)國家實驗研究院台灣颱風洪水研究中心之「山 區定量降雨短時預報技術與預報系統」研究課題,以及(3)行政法
圖 1.1 應科方案「大規模崩塌災害防治」研發技術里程圖
本年度計畫主要是以崩塌災害目錄,建置大規模崩塌的資料庫,
以及快速取向判釋系統,獲取即時資料等初步工作,來建置各項基礎 資料。另一方面,將即時預報技術和預報系統的山區降雨資料、整合 之監測技術、境況模擬,以及災因選擇等各項技術之研發成果彙整 後,希望可以提供作為未來發展大規模崩塌災害預警,以及防災地圖 繪製時的重要參考。本報告之第二章至四章,分別為儀科中心、颱洪 中心、以及災防中心之年度成果彙整,第五章則為三個研究課題之結 論與建議,最後則為相關參考文獻。
第二章 崩塌災害評估儀器與預警系統技術發展
由於科技日新月異,人類的生活品質逐漸提高,對於天然災害防 治的觀念日益加深,雖然部分天然災害的發生及結束時間可以由氣象 報告來預估,但其損害程度常常是無法掌握的,如風災、水災,土石 流,其影響範圍通常廣泛,災況變動速率大,災害對環境及人民生命 財產的影響量很難及時獲得。此計畫目的,儀科中心整合國內相關技 術與資源,針對特用型之災害預警儀器監測系統趨勢,研發坡地潛勢 崩塌災害評估儀器與坡地崩塌即時監測影像觀測技術,降低坡地防災 之成本及提高其時效性。
2.1 坡地多點感測器模組與通信架構系統可行性技術發展 台灣地處歐亞大陸板塊和菲律賓海板塊交界處地震頻繁發生,且 夏季有西南季風、冬天有東北季風、春末至秋初更有梅雨颱風肆虐,
這一切使得台灣的土質更為的鬆軟不穩定,在與湍急的河流交互作用 下土石流、山崩等崩塌災害不斷的發生奪去眾多的生命,無奈災害的 發生的源頭往往是地處偏遠且公路、電力、水力、通訊等基礎建設難 以到達的地點,造成災難預警系統設置受限無法即時監測災難源頭,
除此之外目前災難預警系統還面臨的幾個重大的問題:維護成本高 昂、佈建系統困難、監測設備昂貴無法做大範圍監測,為此我們提出 以無線感測網路為核心的災難預警系統來解決傳統災難系統所無法 解決的問題。
如何從路由到目標節點或基站。現今有提出很多 MAC(Ye et al., 2002, Dam and Langendoen, 2003, Buettner et al., 2006, Liu et al., 2007, Rhee et al., 2008)和路由(Al-Karaki and Kamal, 2004)的設計,在文獻中 許多方面表現優異,但其設計仍尚缺乏實際和長期的測試,以確保在 實際環境中的可靠性。此外媒體存取控制層至網路層的效能容易受到 底層硬體特性的影響。因此,此技術發展選擇另行設計一種軟體,直 接整合媒體存取控制層至應用層(Application Layer),此種設計可免除 四層中四種設計上下相容上的疑慮並使得設計更為一致,易於找出各 種軟體造成的問題。
而在泛用室外環境監測的無線感測網路平台設計中,泛用設計需 具有低硬體成本、低耗能與高度目的設計自由,鑑於以上要點採用挪 威 Nordic 半導體公司推出的 2.4GHz 無線射頻收發芯片與美國 ATMEL 半導體公司生產搭載 ATMEGA328 微處理器的 Arduino Uno 開發板來做為泛用硬體平台。選用兩者結合而成具有多跳網路的節點 成本僅不到 30 美元,相較於主流的無線感測網路裝置 Mote 價格更是 擁有 72%的優勢,泛用平台成功的推動將降低技術與時間成本,並加 速領域知識普及與降低跨領域門檻。
圖 2.1 節點系統架構圖
戶外無線感測網路環境總是多變且難以預測,感測器網路可能隨 著放置地點、間隔距離、時間、溫度、濕度、季節氣候變化,甚至動 物與人類的活動皆會對網路拓樸產生不可預期影響,因此網路需具備 有能高度適應環境變化的拓樸。再者戶外無線感測網路的建置通常有 長時間且不易配線等特性,通訊協定必須是依靠獨立電源能長時間穩 定運作。最後作為低成本的嵌入式系統限制,微處理器有限的處理能 力無法負荷龐大的網路拓樸,所以應採用輕量級的傳輸協議。
ZigBee(ZigBee Alliance., 2008)作為至今成熟的無線個人區域 網路(Low-Rate Wireless Personal Area Network)的代表協定,其具備了 低耗電、低成本、支援大量網路節點、支援多種網路拓撲並且可靠。
但作為戶外無線感測網路的通訊協定其拓樸與提供的功能存在著一
唯一能執行低功耗操作的只有 End Device。有鑒於此在 Router 無法執 行低功耗操作的 ZigBee 無線感測網路架構下,系統的運作時間將因 作為 Router 節點的無線射頻模組無法關閉而大大下跌。這也促使我 們必須實現一個能適應戶外無線感測網路環境的通訊協定。
根據 Huang-Chen Lee 教授提出針對通用室外環境監測無線傳感 器網絡平台(Lee., 2012)的概念一文中,從多種感測網路的通訊機 制所整理出的結論:在多數節點和基站(Sink)做時間同步的應用中,
節點皆需要取得準確的時間戳記(time stamped),基站才能識別該資料 串流。由此同步彼此時間時使用時分多址(TDMA)通信協議會是較好 的選擇。
在 建 立 網 路 中 各 節 點 的 關 係 中 我 們 參 考 了 D.S.J. De Couto
(Couto et al., 2002, 2003), K.-W. Chin(Chin et al., 2002)等人的研 究成果,研究成果表明:一個純粹基於跳數來選擇傳輸路徑,常常導 致所選的並不是最好的路由路徑。基於此原因我們選擇統計接收到最 多 Beacon 封包的節點來做為我們的路徑節點,以確保由一跳到下一 跳的通訊品質。
2.1.1 節點系統架構
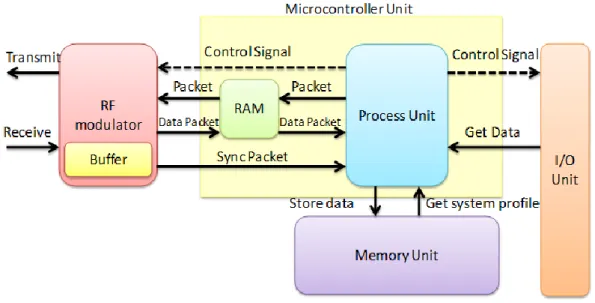
下圖 2.2 表示節點系統架構,其中分為五大單元:負責接收發送 的無線射頻模組(RF modulator)、緩存資料用的快閃記憶體(RAM)、
處理網路封包與偵測資料的中央處理單元(Process Unit)、偵測資料與
圖 2.2 節點系統架構圖
(1)無線射頻模組(RF modulator)
無線射頻模組由中央處理單元輸送控制訊號(Control Signal)來驅 動,中央處理單元在正確的時間點喚醒無線射頻模組,無線射頻模組 在依據控制訊號決定目前該執行的動作,控制訊號有四:睡眠訊號、
喚醒訊號、傳送訊號、接收訊號。
睡眠訊號與喚醒訊號負責控制無線射頻模組電源狀態,從接收睡 眠訊號起無線射頻模組將進入省電模式(Power down),進入省電模式 時無線射頻模組將使用最低限度的電流維持運作(近似於 900 nA) [4],待喚醒訊號到達後進入待機模式(Standby Mode)等待任務。
傳送訊號與接收訊號負責控制無線射頻模組工作狀態,在取得傳 送訊號後,無線射頻模組會從快閃記憶體中取出待傳送的資訊,將資
間的封包等,將會由中央處理單元直接做處理;而封包類型屬於非時 間重點型封包,如資料封包等,則會先存入快閃記憶體中,待節點切 換至處理模式再做資料處理。
無線射頻模組於接收封包時,對封包做迅速分類的原因源自於在 嵌入式系統裡中央處理的單元的時脈並非如個人電腦般的高,本文的 系統如果採用接收即處理的方式,在中央處理單元處理封包時,將造 成新的網路封包持續堆積於無線射頻模組的資料緩衝記憶體,直至無 線射頻模組的緩衝記憶體無法容納導致封包丟失,而我們知道重新取 得資料是十分高昂的成本,所以為了避免這個問題我們採用封包分類 的方式。時間重點型的封包由於喪失時間特性會導致封包失去意義必 須第一時間處理;非時間重點型的封包則否,處理時只需把無線射頻 模組裡的資料取出放入節點的快閃記憶體,省去的封包處理時間將使 中央處理單元能快速的處理更多的封包,避免無線射頻模組的封包丟 失問題。
(2)中央處理單元(Process Unit)
中央處理單元為整個節點的核心,負責統合無線射頻模組、快閃 記憶體、輸出輸入單元與記憶單元此四大單元,使其在正確的時間點 運作即是中央處理單元的工作。
在初始化模式時,中央處理單元從記憶單元中取出系統參數,系 統參數包含節點身份編號、最大節點總數、最大子節點數、時隙(Time
進入空閒模式時中央處理單元將會依照節點身份編號、時隙長 度、工作周期與感測頻率四樣做傳送模式、接收模式、處理模式與感 測模式四者間的切換。
(3)記憶單元(Memory Unit)
記憶單元主要工作有兩項:感測資料的保存與節點參數的讀取。
感測資料的保存能有效避免節點在長時間無法順利將資料傳送回父 節點時,造成的快閃記憶體容量不夠資訊遺失問題。節點參數由使用 者藉由使用者介面寫入 micro SD 卡,節點再從 micro SD 卡讀取近節 點中,節點將會獲取本次感測目的中的所有參數後再行運作。
(4)輸入輸出單元(I/O Unit)
輸入輸出單元主要的元件有感測器與按鈕,按鈕的部分我們設有 安裝資訊按鈕、記憶體單元開關與初始化模式重啟按鈕,這些按鈕將 方便我們在環境現場安裝我們的節點。節點的感測器有三軸加速度 計、溫濕度感測器、土壤濕度計與雨量計四種,此四種感測器是我們 整理眾多的無線感測網路應用後決定使用(詳情請參閱第三節),在節 點中會包含這些感測元件的各種設定資料,使用者只需在使用者介面 輸入相關的偵測頻率與資料傳送條件即可使資料順利傳回。
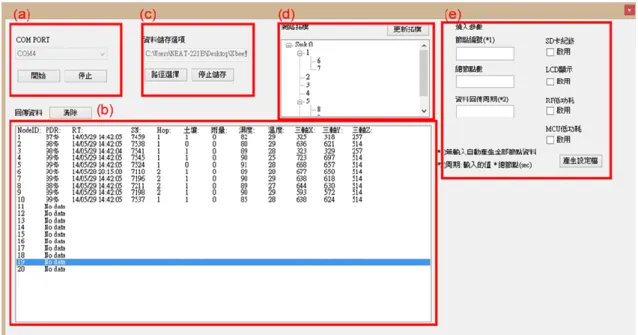
(5)使用者介面
首先從使用者介面與節點的溝通,我們採用串列埠(Serial port)
成有效的資訊顯示在訊息列表中,應用專家能輕易解讀節點傳回來的 溫度、濕度、三軸加速度等等感測元件的感測值,且程式將記錄最後 一筆訊息接收的時間與至今的傳輸成功率,應用專家亦能迅速且輕易 的觀察到部署的節點是否正常運作。此舉將以往只有節點看得懂的封 包內容和只有無線感測網路系統專家才看得懂的訊息記錄檔(Log)化 為即時的資訊供應用專家使用。
接著在資料儲存的方面如圖 2.3(c),我們提供直接在使用者電腦 上儲存的功能,應用專家能依據使用習慣儲存在不同的空間並且輕易 的做資料搬移與分析,而不用關閉運作中的網路,除此之外儲存的資 料會記錄資料收到的時間並且依天數、節點做分類,能使資料做有效 率的使用。
節點安裝的地點是否合適,除了可以從圖 2.3(b)紅框中的傳輸成 功率做判斷之外,我們也提供如圖 2.3(d)紅框中的方式。框中我們採 用樹狀列表的方式完整還原我們的樹狀網路拓樸,應用專家能一目了 然的看出系統中的節點目前的父節點與子節點,從而判斷目前各節點 負載是否過大,亦或是當一部分節點失去聯繫時,判斷是否為單一節 點故障導致沒有任何路徑可以選擇的節點無法傳送資料等等情況。
最後應用專家可以從圖 2.3(e)設定一個無線感測網路系統的參 數,可以設定的參數從節點數、資料回傳周期、SD 卡記錄功能、LCD 顯示器開啟到節點低功耗的設定接可以做更改,這跳過了以往要安裝
圖 2.3 使用者介面
2.1.2 實作與結論
系統評價方式必須公平且有公信力,為此選用 Digi International 所出產的 XBee 做為我們比較的對象。XBee 是一種在 2.4GHz 頻段上 工作的 IEEE802.15.4 產品,其作為商業化的無線射頻模組有一定程 度上的穩定與使用率。XBee 擁有眾多不同的通訊協定版本,其中包 含基礎的 IEEE802.15.4 版本、在其基礎之上的 Zigbee 版本與 DigiMesh 2.4 版本,在做為一個好的對照組的抉擇中我們認為 DigiMesh 2.4 擁 有幾個重要的特性是跟我們研究相似的:(1)DigiMesh 只有一種節點 狀態,相較於 Zigbee 網絡設置更簡單、(2)DigiMesh 不論任何的節點 皆有擴展網路的功能而 Zigbee 中只有 Coordinator 與 Router 擁有擴展 網路的能力、(3) DigiMesh 並不依靠單一的 Coordinator 或 Gateway 來同步,透過提名與投票的機制來決定時間由誰同步,進一步使得網 路能有較高的抗干擾與損壞能力。(4) DigiMesh 裡允許任何的節點進 行睡眠而非像 Zigbee 只能允許 End Device 進行睡眠。而以上提及的 特點做為戶外無線感測網路平台的對照組是非常重要的,因此我們採 用 XBee DigiMesh 為實驗對照組。
在硬體架構上我們為了追求公平,XBee 所搭配的微處理器與本 研究同樣使用 ATmega328P,如此可以免除微處理器的處理效率差易 導致的封包遺失的問題,在輸出功率上面 XBee 與 nRF24l01 同樣為 1mW 輸出功率的版本,天線方面採用同強度的天線,以讓整體硬體 差異最小化,詳細實驗硬體規格比較如表 2.1,實驗實體如圖 2.4。
表 2.1 實驗平台軟硬體對照表
圖 2.4 實驗實體
實驗將系統與對照組放置於中正大學電通館二樓,並設置十一個 節點於二樓走廊。兩邊的實驗系統配置皆為每分鐘傳一筆感測資料;
每 二 十 秒 發 送 一 次 特 殊 封 包 , 接 收 到 的 節 點 會 重 置 看 門 狗 (Watchdog);每一百秒沒收到特殊封包看門狗會讓節點重開機。實驗 運行共五天,各節點的擺放位置如圖 2.5 所示。
本研究 對照組
通訊協定 自行研發之感測網路協定 IEEE802.15.4 , DigiMesh
微處理器 ATmega328P ATmega328P
無線射頻模組 nRF24l01 Xbee DigiMesh 2.4
工作頻段 2.4GHz 2.4GHz
RF功率 1mW 1mW
天線 SMA RP-SMA
省電模式 全節點皆可 只有End Device可執行
實驗數據的分析上,我們主要分析資料收集站(圖 2.5 中的綠色節 點)所接收的封包訊息並將資訊統整於圖 2.6。圖 2.6 中我們將節點的 資料順利到達資料收集站做為一次成功的傳輸,反之沒收到資料當作 失敗,並在封包中夾帶封包編號以利我們統計節點總共傳輸的封包 數。圖 2.6 中我們也加入各個節點總共傳輸次數的直條圖,以便觀察 各節點是否正常運作,從圖 2.6 中可以看出 XBee 的六號節點並沒有 成功的運行至最後一天,其設置的地點電源疑似遭人為撞擊導致無法 正常供電,所以在實驗探討的部分六號節點將不做討論。
圖 2.6 資料接收站接收的封包成功率與總接收筆數分析圖
從資料接收站接收到封包的成功率來看,我們可以看出在大部分 的節點中,我們節點的傳輸成功率互有高低且差異不到 1%,這顯然 是很好的現象,因為 XBee DigiMesh 模組雖然任意節點皆可以進行低 功耗操作,但網路中每隔一段距離後,仍然需要一個節點主動持續監
1 2 3 4 5 6 7 8 9 10
Xbee(筆) 4518 4524 4523 4523 4524 1478 4478 4486 4488 4522 本研究(筆) 5951 6024 6028 6028 6008 5675 5755 5744 5745 6025 Xbee(%) 99.42% 99.69% 99.93% 99.93% 99.25% 89.31% 97.97% 95.99% 94.45% 99.78%
本研究(%) 99.90% 99.40% 99.35% 99.39% 99.08% 90.68% 90.43% 87.60% 90.62% 99.32%
10001500 20002500 30003500 40004500 50005500 60006500 70007500 80008500
40.00%
45.00%
50.00%
55.00%
60.00%
65.00%
70.00%
75.00%
80.00%
85.00%
90.00%
95.00%
100.00%
節 點 總 傳 送 封 包 筆 數 封
包 接 收 成 功 率(
%)
接收封包成功率與筆數
耗。我們認為兼具全節點低功耗功能的我們佔有優勢。
而在節點資料差異較大的七、八、九號節點我們嘗試分析原因並 找出一些特異點,發現位於七號、八號與九號位置的節點連線的環境 十分不穩定,我們將不穩定的證據實際資料繪製成圖 2.7。圖 2.7 中 我們將各節點更換父節點的次數做統計並與傳輸成功率做比較,發覺 此三顆節點的更換次數遠高於其他節點。在圖 2.7 中有趣的一點是一 號節點同樣有相似的問題,但其傳輸成功率卻維持著 99.90%的高水 準表現,這讓我們做出以下推測:更換次數過高的七、八、九節點,
距離間隔較其他節點長兩至三公尺,這使得通訊距離接近臨界值,導 致必須時常更換網路連結,而在此條件下仍維持近 90%的傳輸水準我 們認為是可以接受的。
圖 2.7 各節點網路連結更換次數與傳輸成功率
0.00%
10.00%
20.00%
30.00%
40.00%
50.00%
60.00%
70.00%
80.00%
90.00%
100.00%
0 50 100 150 200 250 300 350
1 2 3 4 5 6 7 8 9 10
傳 輸 成 功 率(
%) 網
路 連 結 更 換 次 數( 次)
網路連結更換次數 傳輸成功率
利用此次實驗的結果我們將在未來把網路連結的更換次數放入 使用者介面,並且告知可能需要新增節點的地方以利提升傳輸成功 率。
103 年 11 月底時將多物理量測型態感測器之置於中正大學之戶 外測試,此期間南部天氣晴朗,無下雨,也無地震,因此多物理量測 型態感測器只有溫濕度有較明顯之變化,如下圖 2.8 所示。
圖 2.8 溫度與濕度變化資料
溫度於攝氏 20 度到 30 度之間變化,戶外濕度 40%至 90%之間 變化,此驗證多物理量測型態感測器與硬體網路架構是可行的方式。
2.2 坡地崩塌區域之快速取像評估系統開發
災區大多屬於局部性或區域性之小面積測區,以專業設備進行災 況資訊獲取則成本過高,並且災況資訊極具時效性,必須考量設備的 即時性及機動性,傳統設備(衛星影像、航空影像)因受其公轉週期及 雲層遮蔽等因素限制,及時性與機動性不足,拍照後需做幾何精度修 正與正射化等影像處理,時間費時不利防災救災單位迅速作出正確決 策。因此,如何在最緊急關鍵時刻,快速蒐集災況的原始面貌,是我
2 台各 1210 萬有效畫素的全片幅 CMOS 感測器,具有高感光度、高 動態範圍、低雜訊等優點,並包含 R、G、B 和 NIR(Near Infrared)共 四種波段,系統機構以碳纖維及鋁管材設計製作而成,保有剛性和承 載性,又能大幅減輕重量,此系統含 4 波段相機模組僅重 4.6KG,符 合旋翼 UAV 載重限制 5KG 以下之規範,系統如下圖 2.9 所示。
圖 2.9 第一代快速取像系統
在 102 年 9 月一次雲林坪頂地區航拍任務時,為閃避山區道路上 的電線,下降重落地,起落架應聲從中折斷,系統鏡頭直接撞擊地面,
造成了鏡頭損毀,如下圖 2.10 所示:
圖 2.10 第一代快速取像系統重落地損毀
事後我們檢討,除了操作環境複雜,造成這次的事故,在系統設 計上,是否能再強固性一點,尤其是載台的設計部分。故 103 年在第 二代系統開發上,進一步針對載台強固性、重量及系統性能上,改進 與優化;首先是感測器本體選擇部分,由於科技的進步,新型態的全 片幅感測器,已經可以捨棄五稜鏡,讓影像直接投射在 CMOS 上,
直接由 LCD 取景,也就是全片幅式的微單眼相機,不僅把體積縮到 極為輕巧,更完整保留了全片幅 DSLR 的專業特性及高 ISO 畫質表 現,跟第一代系統相比,感測器本體重量一口氣從 995 公克減到 416 公克,變成一半不到的重量,如下圖 2.11 所示:
圖 2.11 第一代與第二代取像系統大小比較
在鏡頭選擇上,由於全片幅微單眼相機為新產品,其可搭配的 FE-Mount 鏡頭中,定焦鏡目前只有兩款,分別是 Carl Zeiss Sonnar T*
FE 35mm F2.8 ZA 和 Carl Zeiss Sonnar T* FE 55mm F1.8 ZA,其規格 表如下表 2.2 所示,以旋翼 UAV 航高約 600 公尺以下,在考量覆蓋 率及地面解析度後,我們選定 Carl Zeiss Sonnar T* FE 35mm F2.8 ZA 為第二代取像系統的鏡頭,如未來採用定翼 UAV,則可選用長焦段 定焦鏡,提升地面解析度至公分等級。
表 2.2 鏡頭規格比較表
Carl Zeiss Sonnar T* FE 35mm F2.8 ZA
Carl Zeiss Sonnar T* FE
55mm F1.8 ZA
濾鏡口徑 49mm 55mm
光圈 f/2.8 f/1.8
視角 63°(對角) 43°(對角)
光圈葉片數 7 9
直徑 x 鏡長
61.5 x 36.5 mm 64.4 x 70.5 mm
重量
120 g 281g
接著進行近紅線改裝,新的感測器模組像素高達 2400 萬畫素,
尺寸為全片幅大小,為能塞進這狹小的機身,電路板層層堆疊,以軟 排線互相連結,光是機構拆解就費了好大一番功夫,一不小心可能就 會傷到電路板,拆下後的這片 Exmor CMOS 如下圖 2.12 所示:
近紅外改裝
拆下的CMOS
圖 2.12 近紅外改裝
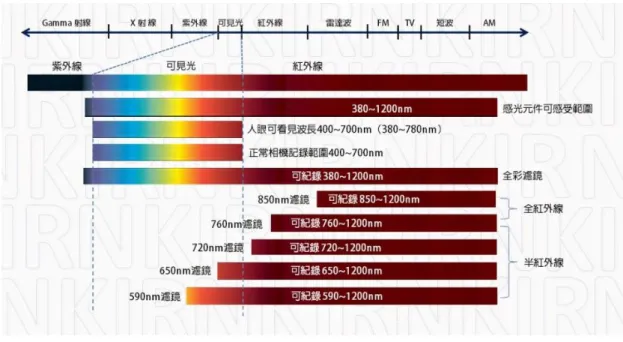
典型的 CCD 感測器或 CMOS 感測器,光譜響應曲線約 380nm 至 1200nm,可見光波長在 380nm~780nm 之間,光譜響應曲線大於 780nm 低於 1200nm 是 CCD 或 CMOS 感測器可應用的近紅外光範圍,如下 圖 2.13 所示,但是多數的數位相機在出廠時,為了增加色彩的鮮豔 度以及降低雜訊,都會在 CCD 感測器或 CMOS 感測器前加裝紅外去 除濾波器(IR-Cut Filter),因此只要透過置換 IR-Cut Filter,加上光路 折射率的修正,即可讓數位相機變成近紅外相機,關於選擇何種規格 紅外光學濾波器就跟觀測何種物體,水,植物或礦物等特徵波長有 關,表 2.3 為 SCHOTT 紅外光學濾波器光學性質規格,RG 型號表示 可使紅外光線透過之紅色和黑色玻璃,RG 後面之數字表示以下範圍 之可見光被濾除,如 RG_800 為 800nm 以下可見光範圍被濾除,只 通過 800nm 以上之紅外光。
圖 2.13 光譜圖 表 2.3 紅外線濾鏡規格表
SCHOTT 型號 以上紅外波長通過 RG_695 695nm RG_710 710nm RG_780 780nm RG_800 800nm RG_830 830nm RG_850 850nm RG_1000 1000nm
最後是機構部分,由於第一代系統四波段感測器部分占了快 4 公 斤的重量,為了減輕系統重量,載台採用鋁管材設計製作,的確是達 到了 5 公斤內的目標,之後經多次的任務執行,在一次的重落地後折 損,造成系統損毀,於是在 103 年的計畫,我們在載台部分採全碳纖 維製作,強化剛性,並加上自穩式兩軸穩定雲台,及抗震阻尼,來增 進穩定度,如下圖 2.14 所示:
圖 2.14 自穩式兩軸穩定雲台
其系統總重量壓低至 2.2 公斤,與第一代系統相比減輕了 52%的 重量,未來在載具的選擇上可以更多元,例如搭載於多旋翼機上使 用;以四旋翼為例,在四旋翼機的外尺寸與傳統直升機主旋翼直徑相 等的原則下,四旋翼機之載重能力只有傳統單旋翼直升機的一半,但 在操控上以四旋翼機較為簡易,在設計及應用上也較有彈性,也是未 來應用的主流。因此,減輕一半重量的第二代系統快速取像評估系 統,更適合搭載於多旋翼機上使用,下表 2.4 為第一代與第二代的系 統比較表。
圖 2.15 第二代 4 波段快速取像系統_任務執行與拍攝成果
表 2.4 四波段快速取像系統比較表
項目 第一代 4 波段快速取像系
統(102 年開發)
第二代 4 波段快速取像 系統(103 年開發) 光學波段 R、G、B 及 NIR R、G、B 及 NIR 感測元件數 1200 萬畫素 2400 萬畫素
重量 4.6 公斤 2.2 公斤
地面解析度(35mm 鏡頭航 高 600 公尺)
優於 12 公分 優於 10 公分
穩定裝置 單軸自穩式 雙軸自穩式
記憶裝置 可擴充 64GB 可擴充 256GB RGB 及 NIR 波段影像拍攝
時間同步誤差
< 1/100 sec < 1/100 sec
單次飛行拍攝張數
900 張/次
340 張/次性價比 中 高
2.3 坡地崩塌近景觀測系統之演算法分析與整合
坡地崩塌區之定點近景即時觀測系統之研發,102 年雖然完成崩 塌監測系統之實驗雛型建置,包括實驗地點選定、相機率定程序、相 機架設安裝與調校、核影像糾正程序、密集匹配方法等工作,已經可 以網際網路由遠端即時監控與取像,然後在 PC 上以監測軟體進行坡 地崩塌的即時解算與監測,103 年繼續將近景即時監測系統之演算法
土石流的發生。且受到近幾年極端氣候的影響,強降雨模式將增加崩 塌發生的機率,對於山區有人居住的村落將造成強烈威脅。103 年計 畫中,則利用兩台能即時回傳影像的 IP Camera 組成立體像對,針對 山區部落裸露之崩塌地區進行監測,並透過近景攝影測量技術,藉由 影像拍攝求解影像方位並重建物體的三維表面模型(Digital Surface Model, DSM),同時透過多時序表面模型的差異分析,並能評估是否 有崩塌現象與土方量的即時計算。考慮供電,交通,幾何等因素,IP Camera 的選址原則與建置有以下幾點考量:
(1) 無線射頻模組(RF modulator)目標點與相機之距離在 500 公尺
~1000 公尺間;
(2) 監測地點已有明顯崩塌跡象或在可預期的未來仍有機率發生崩 塌;
(3) 監測點需與村落鄰近,並能提供電力與網路設備以進行即時資料 傳輸;
(4) 兩台相機的架設須有 50~100 公尺長的基線距離。
於是根據上列條件,IP Camera 選擇小林國小對岸的大範圍崩塌 作為監測目標,並架設在小林國小頂樓兩側約 50 公尺的基線進行長 期監測,其位於新建小林村的對岸,如下圖 2.16(a)所示即為本研究中 監測的大範圍崩塌地。(b)為監測目標與獻度山崩塌之相對位置,其
(a)小林村對岸大範圍崩塌影像
(b)小林村對岸大範圍崩塌與獻度山崩塌相對位置 圖 2.16 小林國小對岸之大範圍崩塌
IP Camera 已於 2013 年底完成架設並正常運作,至 2014 年 12 月 間,約有一年的完整時間,其中台灣分別受到麥德姆颱風(7/21-7/23) 與鳳凰颱風(9/19 與 9/22)的兩次侵襲,本文即針對麥德姆颱風後的地 形變遷進行分析,而鳳凰颱風後本亦進行地形分析,卻發生相機故障 問題,因而緊急帶回修理,且亦針對目標物的拍攝角度有所調整。因 此本報告則針對兩點進行說明,第一為麥德姆颱風後的地形變遷,第 二為目前新調整的變遷與說明。
2.3.1 表面模型重建流程與方法
像機率定
立體對影像
方位求解
核影像糾正
SGM密匹配
表面模型重建
雲霧去除
圖 2.17 表面模型重建流程圖
(1) 透鏡畸變修正
由於相機無法避免因鏡頭所產生的畸變現象,因而需針對各相機 進行像機率定,以求取包含相機焦距(f),像主點(x_0,y_0),輻射畸變 參數(K_1,K_2,K_3)及偏心輻射參數(P_1,P_2)之內方位參數。率定 時,本研究藉由拍攝一佈滿人造標之旋轉圓盤(Rau and Yeh, 2012),
以 30-45 度的傾斜角進行拍照,透過旋轉圓盤即可得到 60-90 度的相 片交會幾何,經附加參數光束法平差模式以計算相機幾何畸變參數,
示意圖如圖 2.18 所示。在式(1)中,其表示附加參數光束法平差的數 學模型,其中(x, y)為影像之量測座標,(x_0,y_0)為像主點座標,
r_11~r_33 為相片之旋轉矩陣, (X, Y, Z)為 像點的物空間座標,
(X_o,Y_o,Z_o)為相片的投影中心,而(∆x,∆y)則為附加參數之改正
y − 𝑦0+ ∆𝑦 = −𝑓(𝑋 − 𝑋𝑜)𝑟21 + (𝑌 − 𝑌𝑜)𝑟22 + (𝑍 − 𝑍𝑜)𝑟23 (𝑋 − 𝑋𝑜)𝑟31 + (𝑌 − 𝑌𝑜)𝑟32 + (𝑍 − 𝑍𝑜)𝑟33
∆𝑥 = (𝐾1𝑟2+ 𝐾2𝑟4+ 𝐾3𝑟6)(𝑥 − 𝑥0) + 𝑃1(2(𝑥 − 𝑥0)2+ 𝑟2) + 2𝑃2(𝑥 − 𝑥0)(𝑦 − 𝑦0)
∆𝑦 = (𝐾1𝑟2+ 𝐾2𝑟4+ 𝐾3𝑟6)(𝑦 − 𝑦0) + 𝑃2(2(𝑦 − 𝑦0)2+ 𝑟2) + 2𝑃1(𝑥 − 𝑥0)(𝑦 − 𝑦0)
(2)
圖 2.18 相機率定獲取多交會幾何影像示意圖
(2) 雲霧去除
山區時常有陰影、雲霧、霾氣等因水氣或灰塵而造成影像失真的 現象,因此有必要針對原始影像進行雲霧之去除,不僅恢復色彩也增 加對比度,進而提升影像匹配之可靠度。在本研究中採用暗通道雲霧 去除法,將原始影像上的霾氣現象去除,而一組原始影像與雲霧去除 後之影像展示於圖 2.19,可很明顯發現山區色彩飽和度與對比度皆有 所提升。
(a)原始影像 (b)雲霧去除後之影像
圖 2.19 原始影像與雲霧去除影像之對照
(3) 方位解算
由於相機架設地點位於山區,且因岩層裸露,植披覆蓋等問題,
難以利用人工方式進行共軛點的量測以解算相機方位。同時考慮匹配 方法應具備高效率,抗雜訊等條件,本研究選用 Speed-Up Robust Feature (SURF) (Bay et al., 2008)法進行立體對影像之特徵匹配,透過 光束法平差計算兩相機之相對方位。圖 2.20 即為應用 SURF 匹配法 所萃取的影像特徵。
(4) 核影像糾正
在影像內外方位皆已求解之後,便能將原始影像轉換至核影像空 間,以減少匹配的搜尋空間並增加後續影像密匹配的效率。核影像具 備以下的幾點特性:
線彼此平行,且影像每一列即為一條核線;
y 視差,僅保有 x 視差,故能重建立體視覺;
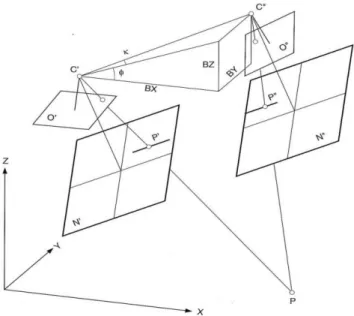
圖 2.21 為核影像轉換之示意圖(Cho and Schenk, 1992)。首先由原 始影像的旋轉角R(ω,ϕ,κ)轉換為垂直影像,再透過基線之偏移量(BX, BY, BZ)計算核影像旋轉矩陣 R_N(ω_N,ϕ_N,κ_N)。最後透過透視投影 轉換,便能將原始影像轉換至核影像空間,式(4)即為轉換公式其中 (x_n, y_n)為核影像座標,(x, y)為原始影像座標。在圖 2.22 中則呈現 一組原始影像與核影像之示意圖,可明顯發現原本具有 y 視差的共軛 點,在經轉換後已不具 y 視差,如此進行密匹配時能增加執行效率與 可靠度。
𝜅𝑁 = tan−1 𝐵𝑌𝐵𝑋 𝜙𝑁= tan−1 𝐵𝑍
√𝐵𝑋2+𝐵𝑌2 𝜔𝑁= (𝜔′+ 𝜔")/2 m3×3= 𝑅𝑁𝑅𝑇
(3)
𝑥 = −𝑓𝑚11𝑥 + 𝑚12𝑦 − 𝑚13𝑓
圖 2.21 核影像轉換示意圖
(a)左像原始影像 (b) 右像原始影像
(c)左像之核影像 (d)右像之核影像
一維搜尋以提升效率。在所選用的密匹配法,本研究採用 Semi-Global Matching (SGM)(Hirschmuller, 2008)法,其能快速可靠的獲得核影像 的視差值。然而匹配得到的視差值仍然具有漏洞,如圖 2.23(a),因此 則另外使用克利金內插法以獲得整幅的視差影像如圖 2.23(b)。
(a)原始視差影像 (b)空間內差後之視差影像
圖 2.23 原始視差與空間內差後之視差影像
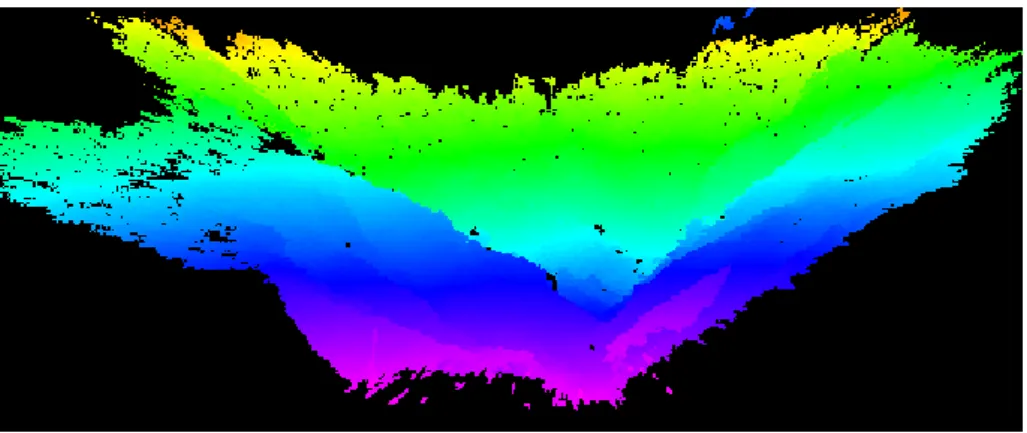
由密匹配求得的視差圖,便能依式(5)在核影像空間重建三維視 圖的深度影像(如圖 2.24)及上視圖(圖 2.25),其中 B 為兩台相機之基 線長,f 為核影像之焦距,Disparity 則為匹配求得的視差。而不同時 期的深度影像透過差異分析,便能了解是否有地形上的變化。
Z =𝐷𝑖𝑠𝑝𝑎𝑟𝑖𝑡𝑦𝐵×𝑓 , X = Z ×𝑥𝑓𝑅, Y = Z ×𝑦𝑓𝑅 (5)
圖 2.24 三維視圖之深度影像
圖 2.25 上視圖
2.3.2 地形變遷分析結果
在監測小林國小對岸崩塌地之地形變化及有無崩塌現象中,本研 究以 20131220(冬)與 20140625 (夏)時隔半年的立體像對,利用本研究 提及的方法重建兩時期的數值表面模型,並以差異分析比較是否有崩 塌現象發生。圖 2.26 中展示兩時期的影像立體對,由影像的變化來 看,可發現隔了半年植被生長更為茂密,而這也反映了台灣植物在季 節上的變化。另一方面,單純就影像上來看該區域似乎無明顯崩塌現
(a)20131220 核影像立體對
(b)20140625 核影像立體對 圖 2.26 前後兩期之核影像立體對
透過密匹配得到兩期的視差圖如圖 2.27,兩者可說是無明顯變 化,但在 20140625 的視差圖相對粗糙,由其差異亦反應出植被的生 長變化。而由表面模型重建及進行差異分析後呈現於圖 2.28,在黑色 邊界線之上部呈現許多雜亂現象,這主要是因該地區為天空,其視差 值是透過內差得到,因此相當不可靠。而下半部則為主要目標物,可 以看到地形上的變化主要是呈現正值,主要也是植被生長造成(紅色 區塊),而在幾個舊有崩塌區(紅圈內,與 2.26(a)紅圈對應),其地形變 化約為零,可說是無崩塌現象之發生。
圖 2.28 崩塌地區地形變化
2.3.3 近景觀測系統故障後更新維修與整合
(1) 相機保養與維護
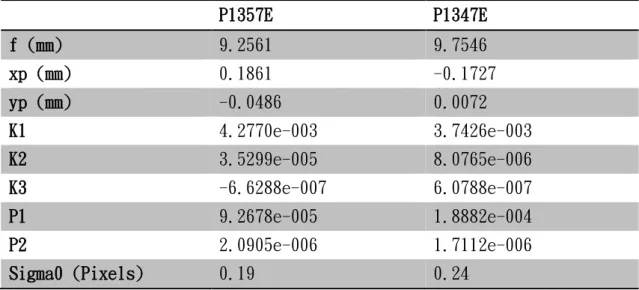
由於鳳凰颱風後 IP Camera 發生無法連線之情況,現場查看後推 測是當機問題,又因為久未維護,則帶回來重新進行相機率定與簡易 清潔。在本次的清潔中發現外置保護鏡頭之壓克力片有磨損,同時內 部的鏡頭對焦環亦有鬆動現象,上述現象都將造成影像模糊,且對焦 失真,將無法應用率定之內方位參數進行求解。因此在處理上,則將 前置的壓克力板更換成玻璃片,鏡頭部分則重新對焦並以防水膠固 定,並更新其內方位參數。如 2.5 所示即為更新後的相機內方位參數,
由 Sigma0 來看,其精確度亦能在 0.25 像元以內,說明像機率定成果
表 2.5 更新後之相機內方位參數 P1357E P1347E
f (mm) 9.2561 9.7546
xp (mm) 0.1861 -0.1727 yp (mm) -0.0486 0.0072 K1 4.2770e-003 3.7426e-003 K2 3.5299e-005 8.0765e-006 K3 -6.6288e-007 6.0788e-007 P1 9.2678e-005 1.8882e-004 P2 2.0905e-006 1.7112e-006 Sigma0 (Pixels) 0.19 0.24
(2) 相機安裝與視角變更
透過本次維修,亦與現場小林國小老師做簡單訪談,其生活經驗 告知這兩次颱風侵襲不像往年有造成重大災害且地形上無明顯變 化。因此本次重新安裝時,更改相機視角將本來監測的大規模崩塌向 右移動,以監測如圖 2.29 新立體像對中紅框處的裸露區,且亦能涵 蓋舊有大範圍崩塌之範圍。
為了提供完善地形資料以建置地形地真,可以考量利用地面光達 掃描、航空照片建置,或地面高解析度影像的拍攝來建置地形真值以 進行成果精確度的分析。然而地面光達不僅設備昂貴,且距離、點雲 密度無法符合該區域的大範圍掃描故不考慮,航空照片則因視角差異 將使成果有不一致之問題。因此本研究則以手持式高解析度之單眼相 機,透過多視角與多基線的拍攝,利用 Agisoft 軟體重建該地區的三 維模型。如圖 2.30 為利用高解析度單眼相機重建之三維模型。圖 2.31 為三維模型之上視圖,因遮蔽關係造成之破洞亦與 2.25 相仿。
圖 2.30 大範圍崩塌之三維模型
圖 2.31 三維模型上視圖
(4) 嵌入式系統整合
15 瓦,內建英特爾(N455_1.666GHz)中央處理器,具有 2 組 RS232 與 4 組 USB 端口,DDR3 記憶體 2GB,並有 2.5 英吋之 STAA 硬碟,或 固態硬碟皆可,採用 Linux 系統軟體,穩定性高,重量低於 1 公斤,
用於戶外須加裝防熱裝置,以免造成記憶體失效;嵌入式系統採整組 系統與兩部攝影機可以連結,完成耗電量低於 50 瓦之演算分析與嵌 入式系統整合,近景觀測系統觀測演算分析與嵌入式系統整合如下圖 2.32 所示。
圖 2.32 近景觀測系統與嵌入式系統整合
第三章 山區定量降雨短時預報技術與系統
3.1 雷達資料同化研究成果與改進 3.1.1 系集實驗成果比較
本計畫在 2013 年建置了一套雷達資料同化系統,並透過本中心 執行的 TAPEX 系集實驗平台實際模擬了一整年,並選擇一實驗成員 為其對照組,其結果如圖 3.1 所示,顯示 0-6 小時之雨量預報,有雷 達資料同化的實驗明顯優於無雷達資料同化的實驗,証明雷達資料同 化可改進極短期定量降雨預報,但隨著預報時間增加,其優勢逐漸減 少。
雖然雷達資料同化在 0-6 小時有其優勢,但在目前 TAPEX 實驗 設計的架構下,前六小時的預報結果無法及時提供給後續應用端做使 用,因此在極短時定量降雨預報的需求之下,勢必對對流尺度資料同 化策格以及預報的時間做更有效的規劃,本計劃在今年度進行了三項 主要的研究成果的改進,以期能達到極短期定量降雨預報的目的。
矩陣;(3)修改同化策略進行快速循環測試。以下將分別說明此三種 改進的影響。
首先是提高模式解析度的影響,為符合水文、防災使用端的需 求,同時考慮雷達可提供高解析度觀測資料,將模式解析度由三層分 別為 45/15/5(公里),提高為二層 15/3(公里),如圖 3.2 所示。
圖 3.2 模式解析度前後比較示意圖
以 2010 年凡那比颱風為例,如圖 3.3 所示,在同化雷達回波後,
5 公里解析度的模式範圍無法立即反映出回波的特徵,而在 3 公里解 析度的模式範圍設定下,可以較快顯示出回波的分佈;5 公里模式解 析度則要在預報三小時後才會明顯出現回波的特徵。而後進行預報如 圖 3.4 所示,也可以看出預報累積六小時雨量不論是在強降雨的位置 或是極值,使用較高模式解析度的雨量預報結果會明顯優於使用較低 模式解析度的結果。
圖 3.3 凡那比颱風個案,在不同模式解析度下同化雷達回波後之分析場回波圖及 預報回波圖
點為能透過熱力風關係來建立變數間的相關性,然而在對流尺度下沒 有熱力風關係,而其缺點為在求解𝜓、𝜒𝑢的過程會有邊界條件和平滑 的問題。因此本研究使用新的控制變數
u
、v
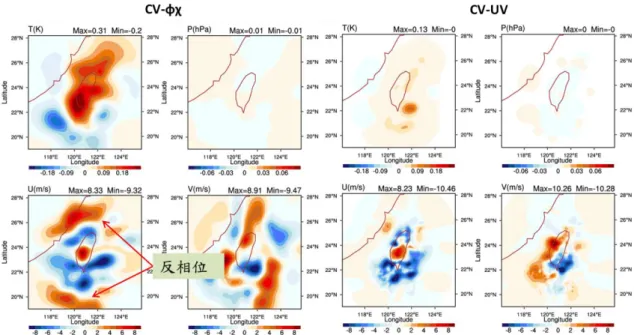
、𝑃𝑠、𝑇、𝑅𝐻𝑠,其優點 為沒有變數轉換的問題,可以透過快速同化循環(rapid update cycle),使模式在不斷同化觀測資料中達到平衡,而且直接使用 u、v 作為背 景場誤差協方差之控制變數於對流尺度下,可以解析較小尺的觀測擾 動,也可避免使用𝜓、𝜒𝑢時,因為放大長波效應,使得同化雷達資料 後,在遠處產生反相位的分析增量,如圖 3.5 所示。
圖 3.5 使用不同背景場誤差變異矩陣之同化分析增量比較圖
本計畫第三項研究工作為進行快速循環(rapid update cycle)同化 實驗,由於雷達資料可快速進行更新,而且通常對流系統發展相當迅 速,因此若可利用多筆雷達資料快速同化進模式中,將有助於分析場
年 6 月的梅雨個案為例,其預報每小時雨量累積結果如圖 3.7 所示,
從圖中可看出,若能進行快速循環同化,可修正北部的延遲降雨,且 對南部降雨預報結果也較佳。
圖 3.6 不同快速循環同化策略測試方案示意圖
圖 3.7 不同快速循環同化策略同化雷達資料後之時雨量預報圖
3.2 極短時定量降雨預報作業化版本 3.2.1 修正雷達資料同化策略
本計畫考量雷達資料可快速提供最新的掃描結果,有鑑於上一節 的研究成果顯示快速循環同化有助於將雷達資料更新進模式中,同 時,為提供極短時定量降雨資訊給水文端應用,以及配合「作業化」
計算時程,在有限計算資源之下,本計畫提出修正之雷達資料同化策 略,包含改變同化方式由 cold start 變成 30 分鐘快速循環同化,以及 逐時進行雷達資料同化,並提供未來 1-7 小時的定量降雨預報結果,
其同化策略示意圖如圖 3.8 所示。
圖 3.8 修正之雷達資料同化策略方案設計示意圖
為配合本總計畫大規模崩塌災害防治技術與風險地圖建置的目 的,將研究分析區域選定為小林村區域,然而因為小林村範圍太小,
因此本研究選定其附近 16 個模式網格點,來進行雨量校驗的工作,
其分析範圍如圖 3.9 所示。另外,本計畫為提供下游應用端有關土石 流預警及道路安全性評估等研究,也選定了近年來易致災的蘇花公路 段,進行模式的預報和校驗,蘇花公路上游集水區和模式分析範圍如 圖 3.10 所示。
圖 3.10 蘇花公路段流域集水區與模式校驗區域示意圖
在分析個案的挑選方面,本研究共選定了梅姬、奈格、蘇拉、桑 達、南瑪都、蘇力、康芮颱風,以及 2012 年 5 月份的梅雨個案,總 共預報時間為 220 個預報時段,進行系統性的評估有無雷達資料同 化,對於降雨預報的影響。將每個預報時間之 1-7 小時累積降雨,與 QPESUMS 觀測降雨做比較,結果顯示有經過雷達資料同化的降雨預 報皆優於無雷達資料同化的結果,尤其在大雨的時候更為明顯,如圖 3.11 所示。
圖 3.11 所有個案有無雷達資料同化之降雨預報,平均模式預報得分比較圖
本計畫已完成新版模式範圍設定,以及同化策略設計,同時也在 本中心的計算設備上建置完成如圖 3.8 所示的準作業化系統,逐時提 供未來 1-7 小時的降雨預報資訊。研究成果顯示雷達資料同化的確具 有改進極短期定量降雨預報的能力,未來本中心也會持續改進同化技 術,並評估使用不同同化方法,例如:系集卡曼濾波、四維變分資料 同化等方法,進行系統性的評估和測試,期望能進一步得到更好的定 量降雨預報資訊。而本計畫也會將此研究成果,提供給水文端的使用 者,做為河道演算、逕流模擬、邊坡穩定分析、都市淹水模擬等等相 關的研究工作所需之雨量資訊。
第四章 大規模崩塌災害防治技術與推動策略研擬
本年度災防科技中心所負責之「大規模崩塌災害防治技術與推動 策略研擬」部分,共分為 3 個子項計畫來執行,主要任務是為推動崩 塌災害的防治工作、蒐整階段性成果與後續推動策略研擬。
這個計畫除了延續災防科技中心 100 年度所執行之大規模崩塌 災害防治推動策略的成果外,並依據 100 年 08 月 17 日第 19 次行政 院災害防救會報中之建議,大規模崩塌災害防治調查工作需要參考日 本、義大利與香港等方法技術,並以保全對象為優先,從全國流域尺 度、集水區尺度,以及山坡地尺度等三個不同之規模,分別進行調查 工作,以篩檢出坡地崩塌災害之高潛勢區域。另外配合儀科中心發展 坡地崩塌災害之監測技術,以及颱洪中心發展定量降雨短時預報技術 等兩個中心之研發成果,應用於集水區或山坡地尺度之崩塌監測及預 警工作中。各中心之整合與分工如圖 4.1 所示。
103 年度之「大規模崩塌災害防治技術與推動策略研擬」子項計 畫下,有 3 項主要的工作,包括:(1)災害歷史紀錄蒐整與分析;(2) 大規模崩塌潛勢區防災地圖制作之示範;(3)大規模崩塌災害防治推 動策略研擬等,各項主要的工作說明如後。
圖 4.1 各中心整合與分工架構
4.1 災害歷史紀錄蒐整與分析
此部分工作最主要的目的有兩項,其一是建立歷史重大崩塌災害 蒐整機制,另外則是有關大規模崩塌基本資料的蒐集與分析。
4.1.1 建立歷史重大崩塌災害蒐整機制
災防科技中心目前對於坡地災害的歷史資料蒐整主要的來源有 幾個部分,除了災防科技中心建置的坡地災害資料庫及水保局的重大 土石災情報告之外,本年度新增介接地調所的山崩災害歷史資料庫,
各部分的資料相關說明則詳述如後。
災防科技中心的坡地災害資料庫,最主要是彙整 1990-2014 年約 10,000 筆全臺坡地災害紀錄(圖 4.2)。資料來源包括地質調查報告
料外,去年度(102 年)也完成彙整及數化國科會早期(民國 56 年 至 81 年期間),全台 251 處重大山崩災害事件之詳細資料,如災害發 生的時間、地點、居住型態、自然環境(地形、岩層、邊坡類型)、
土地利用類型、崩塌種類、崩塌地相對於災區位置、災害誘因、傷亡
(傷、亡)、損傷(全毀、半毀、其他)、工程地質參數、潛在地質災 害,以及災後土地使用狀況等。此處所稱之「重大崩山災害」係指因 崩塌而有人員傷亡、房屋或其他構造物損毀之災害而言,詳細資料整 理如圖 4.3 及表 4.1。
圖 4.2 NCDR 坡地災害資料災點位置 圖 4.3 國科會整理臺灣早期 (1967~1992) 251 處重大崩塌點位
表 4.1 臺灣早期 251 處重大崩塌災害統計
地區 統計期間 案例數 損失 資料來源
北北基 民國 57~75 年 87
死亡:130 人 受傷:20 人 屋損:195 間
張石角 (1988) 桃園、新竹、
苗栗、台中 民國 58~78 年 48
死亡:45 人 受傷:14 人 屋損:256 間
張石角 (1991) 彰化至高雄七
縣市 民國 58~79 年 59
死亡:46 人 受傷:33 人 屋損:179 間
張石角 (1991) 屏東及台東 民國 59~79 年 18 死亡:23 人
屋損:342 間
張石角 (1991) 花蓮及宜蘭 民國 56~81 年 39
死亡:69 人 受傷:33 人 屋損:475 間
張石角 (1993)
合計:
死亡:313 人 受傷:100 人 屋損:1447 間
水保局的重大土石災情報告,為近期(民國 95 年起)重要的坡 地土砂災害參考資料,彙整災害的類型包括崩塌、土石流及洪水災害 等類型,彙整的內容除了災害發生地點、時間、類型外,另外整理了 鄰近參考雨量站的資訊、災損描述及統計、相關現地調查的照片等(如 圖 4.4),相關資訊建置於水保局土石流防災資訊網,提供了詳細的參 考資料供各界查詢及應用。
圖 4.4 水保局重大土石災情彙整格式
地調所新建置的山崩災害歷史資料庫,最主要是彙整 1987-2013 年約 950 筆經現地調查完成的全臺坡地歷史災害紀錄(圖 4.5)。彙整 的內容包含基本資料、地形與地質、致災雨量、其他資訊及影像等類 別,目前相關資料已介接至災防科技中心及應科方案平台中展示。
(a) 查詢介面
(b) 資料展示格式
圖 4.5 地調所山崩災害歷史資料庫
4.1.2 大規模崩塌基本資料蒐集
大規模崩塌基本資料蒐集方面,本年度除地調所提供非莫拉克受
(a) 新北市、桃園縣潛在大規模崩塌影響之聚落分布圖