國
立
交
通
大
學
土木工程學系
碩
士
論
文
狀態空間 DLV 法在剪力構架之地震損傷探測分析與實驗驗證
An Analytical and Experimental Verification of State-Space DLV method in Seismic Damage Detection of Shear Buildings
研 究 生:王智洋
指導教授:王彥博 教授
狀態空間 DLV 法在剪力構架之地震損傷探測分析與實驗驗證
An Analytical and Experimental Verification of State-Space DLV method in Seismic Damage Detection of Shear Buildings
研 究 生:王智洋 Student:Chih-Yang Wang 指導教授:王彥博 博士 Advisor:Dr. Yen-Po Wang
國 立 交 通 大 學 土 木 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University In Partial Fulfillment of the Requirement
For the Degree of Master of Science
in
Civil Engineering July 2011
Hsinchu, Taiwan, Republic of China
i
狀態空間 DLV 法在剪力構架之地震損傷探測分析與實驗驗證
研究生:王智洋 指導教授:王彥博 博士 國立交通大學土木工程研究所摘要
本研究結合 SRIM 系統識別分析與狀態空間 DLV 損傷識別法,發展出 一套以結構地震反應監測訊號為基礎之結構破壞偵測技術。DLV 損傷識別 法係以結構受損前、後之柔度矩陣為基礎,由其差異矩陣之奇異值分解找 出損傷定位向量,凡在此特定荷載作用下應力為零之桿件,即為潛在之受 損桿件。由於柔度矩陣對於高階模態較不敏感,因此僅以部份低階模態即 可有效建構出柔度矩陣,靈敏反映結構之受損狀態。 本研究以平面結構為分析對象,經由數值模擬及一系列振動台地震模 擬試驗,充分驗證本研究提出之狀態空間 DLV 損傷識別法可由結構之全 域反應(樓層絕對加速度)定位出局部受損。試驗與分析結果顯示,在完全 觀測條件下,無論是單一或複數樓層受損,皆可精準定位出受損樓層;在 觀測不足之情況下,若受損樓層有觀測時,無論是單一或複數樓層受損, 在所考慮之各種觀測組合下,都能將受損樓層成功定位出來;惟在受損樓 層未作觀測時,本研究提出之方法皆無法成功辨識受損位置。建議未來實 際建置結構健康監測系統時,應優先考慮於結構之軟弱層配置感應器。 關鍵字:結構破壞偵測、柔度矩陣、系統識別、破壞定位向量、觀測不足ii
An Analytical and Experimental Verification of State-Space DLV
method in Seismic Damage Detection of Shear Buildings
Student:Chih-Yang Wang Advisor:Dr. Yen-Po Wang
Department of Civil Engineering College of Engineering National Chiao Tung University
Abstract
In this study, a method for structural damage detection based on seismic
response data is developed using the state-space damage localization technique
and system realization of information matrix (SRIM). The method of damage
locating vectors (DLV) is based on the flexibility matrix that the DLVs are
obtained by performing singular value decomposition on the flexibility
differential matrix of the structure before and after the damage state. Members
with zero stress under the DLVs as external loads to the structure are
considered potentially damaged. As the flexibility matrices are less sensitive to
higher modes, they can be effectively constructed by considering only part of
the lower modes, yet sensitively reflecting the damaged states of the structures.
In this study, a planner shear-type structure is considered as the objective to verify, via a series of the numerical simulation and shaking table tests, the feasibility of identifying local structural damages from seismic global responses (specifically the absolute accelerations of the
iii
floors ) using the state-space damage localization method. Both analytical and experimental results indicate that, under the condition of full observation, localized storey damages can be precisely identified, regardless of single or
multiple damages. In the case of insufficient observation, if the damaged floors
are observed (co-located observation), then the damaged stories can still be
identified, regardless of single or multiple damages. However, if the damaged
floors are not observed (not co-located observation), then the proposed scheme
fails to identify the damaged stories. Therefore, in real applications, response monitoring of the soft-and-weak stories in the structural health monitoring system are suggested with the highest priority.
Keyword:structural health monitoring, flexibility matrix, system identification,
iv
誌謝
感謝恩師 王彥博教授兩年來的悉心指導,使學生論文更加完整,特 別是在論文寫作期間,不厭其煩的指正與修改。此外,吾師常常提供許多 新穎的觀念,以解決工程實務之問題,讓學生增加許多思考的方向,在此 特向吾師致上最誠摯的謝意。 論文口試期間,承蒙 盧煉元教授、 趙文成教授、 張奇偉教授撥冗 指正,提供學生寶貴意見,使得論文疏漏之處得以獲得改進,特別在此表 達最誠摯的謝意。 感謝學長李建良博士、張簡嘉賞博士、陳逸軒博士、志儒與厚餘於研 究及試驗上之指導,使得試驗能夠順利完成;感謝同學連峰、柏霖與柏翰 於研究及試驗上的協助;感謝學弟黃崗與學妹怡廷在撰寫論文期間分擔研 究室之工作,使得論文能順利完成,在此一並致上最誠摯的謝意。 最後,衷心感激一路給予我鼓勵及支持的家人及朋友,感謝你們的付 出、鼓勵與包容,讓我得以完成研究所的求學生涯,謝謝你們。 謹誌於交大工程二館 2011 年 7 月v
目錄
中文摘要...i 英文摘要...ii 誌謝...iv 目錄...v 表目錄...vii 圖目錄...xv 第一章 緒論...1 1.1 前言...1 1.2 論文構架...6 第二章 SRIM 識別法...8 2.1 前言...8 2.2 SRIM 系統識別理論回顧...9 2.2.1 萃取系統矩陣...13 2.2.2 萃取系統模態參數...18 2.3 SRIM 參數設定...20 第三章 DLV 損傷識別分析之理論...26 3.1 前言...26 3.2 狀態空間 DLV 法之理論回顧...27 3.3 結合 SRIM 之損傷探測分析...38 第四章 DLV 結構破壞診斷分析之數值模擬驗證...45 4.1 前言...45 4.2 三層樓二維剪力構架之結構損傷探測分析...45 4.3 五層樓平面剪力屋架之結構損傷探測...49 4.3.1 單一樓層破壞之診斷分析...49 4.3.2 複數樓層破壞之診斷分析...53 4.3.3 結構損傷探測之敏感度分析...58 4.3.3.1 單一樓層受損...58 4.3.3.2 複數樓層受損...61 4.4 觀測不足之破壞診斷分析...64vi
4.4.1 受損樓層有觀測(co-located observation) ...65
4.4.1.1 單一樓層受損...65
4.4.1.2 複數樓層受損...68
4.4.2 受損樓層未觀測(not co-located observation) ...70
4.4.2.1 單一樓層受損...71 4.4.2.2 複數樓層受損...72 4.4.3 利用模態正交性於觀測不足時之結構損傷探測分析...73 4.5 小結...82 第五章 DLV 破壞偵測技術之地震模擬試驗驗證...83 5.1 前言...83 5.2 振動台試驗設置...83 5.3 完全觀測(full observation)條件下試驗結果與分析(PGA=0.1g)....85 5.4 完全觀測(full observation)條件下試驗結果與分析(PGA=0.05g)….. ...93 5.5 觀測不足條件下之試驗與分析...100 5.5.1 受損層有觀測(co-located observation) ...100
5.5.2 受損層未觀測(not co-located observation) ...104
5.5.2.1 未以正交性重建振態...104
5.5.2.2 以正交性重建振態...105
5.6 小結...107
第六章 結論與建議...108
vii
表目錄
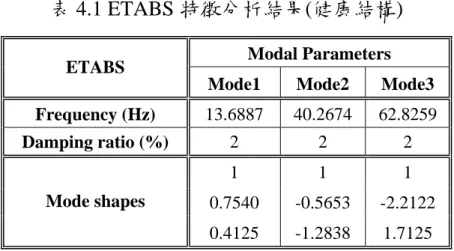
表 2.1 五層樓鋼結構剪力屋架之結構模態參數...113 表 2.2 五層樓鋼結構剪力屋架之結構參數(ETABS) ...113 表 2.3 不同噪訊比下識別之模態正交性誤差(N =3000,N0 = )...114 5 表 2.4 不同噪訊比下識別之模態正交性誤差(N =3000,N0 = )...114 4 表 2.5 不同 N 值下識別之模態正交性誤差(Kobe 地震,PGA=0.1g, 005 . 0 t = Δ sec,p=10)...115 表 2.6 不同 N 值下識別之模態正交性誤差(White Noise,PGA=0.1g, 01 . 0 = Δt sec,p=10) ...115 表 2.7 不同 N 值下識別之模態正交性誤差(White Noise,PGA=0.1g, 005 . 0 = Δt sec,p=10) ...116 表 3.1 五層樓剪力屋架之結構模態參數(健康狀態)...117 表 3.2 五層樓鋼結構剪力屋架之結構參數(健康狀態)...117 表 3.3 五層樓剪力屋架之結構模態參數(一樓受損)...118 表 3.4 五層樓鋼結構剪力屋架之結構參數(一樓受損)...118 表 4.1 ETABS 特徵分析結果(健康結構)...119 表 4.2 SRIM 識別之結構參數(健康結構)...119 表 4.3 ETABS 特徵分析結果(1 樓受損)...119 表 4.4 SRIM 識別之結構參數(1 樓受損)...120表 4.5 SRIM 識別之結構參數(Kobe 地震,PGA=0.1g,健康結構)...120
表 4.6 SRIM 識別之結構參數(Kobe 地震,PGA=0.1g,1 樓受損)...120
表 4.7 SRIM 識別之結構參數(Kobe 地震,PGA=0.1g,2 樓受損)...121
表 4.8 SRIM 識別之結構參數(Kobe 地震,PGA=0.1g,3 樓受損)...121
表 4.9 SRIM 識別之結構參數(Kobe 地震,PGA=0.1g,4 樓受損)...121
表 4.10 SRIM 識別之結構參數(Kobe 地震,PGA=0.1g,5 樓受損)...122
表 4.11 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,單一樓層受損)...122
表 4.12 SRIM 識別之結構參數(Hachinohe 地震,PGA=0.1g,健康結構)...122
表 4.13 SRIM 識別之結構參數(Hachinohe 地震,PGA=0.1g,1 樓受損)...123
表 4.14 SRIM 識別之結構參數(Hachinohe 地震,PGA=0.1g,2 樓受損)...123
表 4.15 SRIM 識別之結構參數(Hachinohe 地震,PGA=0.1g,3 樓受損)...123
viii
表 4.17 SRIM 識別之結構參數(Hachinohe 地震,PGA=0.1g,5 樓受損)...124
表 4.18 結構損傷探測分析結果(Hachinohe 地震,PGA=0.1g,單一樓層受 損)...124
表 4.19 SRIM 識別之結構參數(Kobe 地震,PGA=0.1g,1 及 5 樓受損)...125
表 4.20 SRIM 識別之結構參數(Kobe 地震,PGA=0.1g,2 及 4 樓受損)...125
表 4.21 SRIM 識別之結構參數(Kobe 地震,PGA=0.1g,3 及 5 樓受損)...125
表 4.22 SRIM 識別之結構參數(Kobe 地震,PGA=0.1g,1、3 及 5 樓受損)....126
表 4.23 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,複數樓層受損)...126
表 4.24 SRIM 識別之結構參數(Hachinohe 地震,PGA=0.1g,1 及 5 樓受損) ...126
表 4.25 SRIM 識別之結構參數(Hachinohe 地震,PGA=0.1g,2 及 4 樓受損) ...127
表 4.26 SRIM 識別之結構參數(Hachinohe 地震,PGA=0.1g,3 及 5 樓受損) ...127
表 4.27 SRIM 識別之結構參數(Hachinohe 地震,PGA=0.1g,1、3 及 5 樓受 損)...127 表 4.28 結構損傷探測分析結果(Hachinohe 地震,PGA=0.1g,複數樓層受 損)...128 表 4.29 SRIM 識別之結構參數(1 樓受損,楊氏係數縮減 1%)...128 表 4.30 SRIM 識別之結構參數(1 樓受損,楊氏係數縮減 2%)...128 表 4.31 SRIM 識別之結構參數(1 樓受損,楊氏係數縮減 5%)...129 表 4.32 SRIM 識別之結構參數(1 樓受損,楊氏係數縮減 25%)...129 表 4.33 SRIM 識別之結構參數(1 樓受損,楊氏係數縮減 50%)...129 表 4.34 SRIM 識別之結構參數(2 樓受損,楊氏係數縮減 1%)...130 表 4.35 SRIM 識別之結構參數(2 樓受損,楊氏係數縮減 2%)...130 表 4.36 SRIM 識別之結構參數(2 樓受損,楊氏係數縮減 5%)...130 表 4.37 SRIM 識別之結構參數(2 樓受損,楊氏係數縮減 25%)...131 表 4.38 SRIM 識別之結構參數(2 樓受損,楊氏係數縮減 50%)...131 表 4.39 SRIM 識別之結構參數(3 樓受損,楊氏係數縮減 1%)...131 表 4.40 SRIM 識別之結構參數(3 樓受損,楊氏係數縮減 2%)...132 表 4.41 SRIM 識別之結構參數(3 樓受損,楊氏係數縮減 5%)...132 表 4.42 SRIM 識別之結構參數(3 樓受損,楊氏係數縮減 25%)...132 表 4.43 SRIM 識別之結構參數(3 樓受損,楊氏係數縮減 50%)...133
ix 表 4.44 SRIM 識別之結構參數(4 樓受損,楊氏係數縮減 1%)...133 表 4.45 SRIM 識別之結構參數(4 樓受損,楊氏係數縮減 2%)...133 表 4.46 SRIM 識別之結構參數(4 樓受損,楊氏係數縮減 5%)...134 表 4.47 SRIM 識別之結構參數(4 樓受損,楊氏係數縮減 25%)...134 表 4.48 SRIM 識別之結構參數(4 樓受損,楊氏係數縮減 50%)...134 表 4.49 SRIM 識別之結構參數(5 樓受損,楊氏係數縮減 1%)...135 表 4.50 SRIM 識別之結構參數(5 樓受損,楊氏係數縮減 2%)...135 表 4.51 SRIM 識別之結構參數(5 樓受損,楊氏係數縮減 5%)...135 表 4.52 SRIM 識別之結構參數(5 樓受損,楊氏係數縮減 25%)...136 表 4.53 SRIM 識別之結構參數(5 樓受損,楊氏係數縮減 50%)...136 表 4.54 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,不同程度損傷, 1 樓受損) ...136 表 4.55 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,不同程度損傷,2 樓受損) ...137 表 4.56 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,不同程度損傷,3 樓受損) ...137 表 4.57 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,不同程度損傷,4 樓受損) ...137 表 4.58 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,不同程度損傷,5 樓受損) ...138 表 4.59 SRIM 識別之結構參數(1 及 5 樓受損,楊氏係數縮減 1%)...138 表 4.60 SRIM 識別之結構參數(1 及 5 樓受損,楊氏係數縮減 2%)...138 表 4.61 SRIM 識別之結構參數(1 及 5 樓受損,楊氏係數縮減 5%)...139 表 4.62 SRIM 識別之結構參數(1 及 5 樓受損,楊氏係數縮減 25%)...139 表 4.63 SRIM 識別之結構參數(1 及 5 樓受損,楊氏係數縮減 50%)...139 表 4.64 SRIM 識別之結構參數(2 及 4 樓受損,楊氏係數縮減 1%)...140 表 4.65 SRIM 識別之結構參數(2 及 4 樓受損,楊氏係數縮減 2%)...140 表 4.66 SRIM 識別之結構參數(2 及 4 樓受損,楊氏係數縮減 5%)...140 表 4.67 SRIM 識別之結構參數(2 及 4 樓受損,楊氏係數縮減 25%)...141 表 4.68 SRIM 識別之結構參數(2 及 4 樓受損,楊氏係數縮減 50%)...141 表 4.69 SRIM 識別之結構參數(3 及 5 樓受損,楊氏係數縮減 1%)...141 表 4.70 SRIM 識別之結構參數(3 及 5 樓受損,楊氏係數縮減 2%)...142 表 4.71 SRIM 識別之結構參數(3 及 5 樓受損,楊氏係數縮減 5%)...142
x 表 4.72 SRIM 識別之結構參數(3 及 5 樓受損,楊氏係數縮減 25%)...142 表 4.73 SRIM 識別之結構參數(3 及 5 樓受損,楊氏係數縮減 50%)...143 表 4.74 SRIM 識別之結構參數(1、3 及 5 樓受損,楊氏係數縮減 1%)...143 表 4.75 SRIM 識別之結構參數(1、3 及 5 樓受損,楊氏係數縮減 2%)...143 表 4.76 SRIM 識別之結構參數(1、3 及 5 樓受損,楊氏係數縮減 5%)...144 表 4.77 SRIM 識別之結構參數(1、3 及 5 樓受損,楊氏係數縮減 25%)...144 表 4.78 SRIM 識別之結構參數(1、3 及 5 樓受損,楊氏係數縮減 50%)...144 表 4.79 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,不同程度損傷,1 及 5 樓受損)...145 表 4.80 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,不同程度損傷,2 及 4 樓受損) ...145 表 4.81 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,不同程度損傷,3 及 5 樓受損) ...145 表 4.82 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,不同程度損傷,1、 3 及 5 樓受損) ...146
表 4.83 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 樓受損,co-located observation) ...146
表 4.84 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,2 樓受損,co-located observation) ...146
表 4.85 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,3 樓受損,co-located observation) ...147
表 4.86 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,4 樓受損,co-located observation) ...147
表 4.87 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,5 樓受損,co-located observation) ...147 表 4.88 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 及 5 樓受損, co-located observation) ...148 表 4.89 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,2 及 4 樓受損, co-located observation) ...148 表 4.90 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,3 及 5 樓受損, co-located observation) ...148 表 4.91 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1、3 及 5 樓受損, co-located observation) ...149
表 4.92 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 樓受損,not co-located observation) ...149 表 4.93 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,2 樓受損,not
xi
co-located observation) ...149
表 4.94 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,3 樓受損,not co-located observation) ...150
表 4.95 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,4 樓受損,not co-located observation) ...150
表 4.96 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,5 樓受損,not co-located observation) ...150
表 4.97 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 及 5 樓受損,not co-located observation) ...151
表 4.98 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,2 及 4 樓受損,not co-located observation) ...151
表 4.99 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,3 及 5 樓受損,not co-located observation) ...151
表 4.100 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1、3 及 5 樓受損, not co-located observation) ...152
表 4.101 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,not co-located observation,以正交性重建模態)...152 表 4.102 ETABS 特徵分析之結果(健康結構)...153 表 4.103 SRIM 識別之結構參數(輸入 1、輸出 4,健康結構,觀測 1245 樓) ...153 表 4.104 正交性重建之結構模態(健康結構)...153 表 4.105 ETABS 特徵分析之結果(3 樓受損) ...154 表 4.106 SRIM 識別之結構參數(輸入 1、輸出 4,3 樓受損,觀測 1245 樓) ...154 表 4.107 正交性重建之結構模態(3 樓受損) ...154 表 4.108 ETABS 特徵分析之結果(健康結構)...155 表 4.109 SRIM 識別之結構參數(輸入 1、輸出 4,健康結構,觀測 2345 樓) ...155 表 4.110 正交性重建之結構模態(健康結構)...155 表 4.111 ETABS 特徵分析之結果(1 及 5 樓受損)...156 表 4.112 SRIM 識別之結構參數(輸入 1、輸出 4,1 及 5 樓受損,觀測 2345 樓)...156 表 4.113 正交性重建之結構模態(1 及 5 樓受損)...156 表 5.1 鋼結構模型之參數...157 表 5.2 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.1g,未受損)...157
xii 表 5.3 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.1g,1 樓受損)...158 表 5.4 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.1g,2 樓受損) ...158 表 5.5 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.1g,3 樓受損) ...158 表 5.6 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.1g,4 樓受損) ...159 表 5.7 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.1g,5 樓受損) ...159 表 5.8 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.1g,1、5 樓受損) ...159 表 5.9 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.1g,1、3、5 樓受損) ...160 表 5.10 結構損傷探測分析之結果(Kobe 地震,PGA=0.1g)...160 表 5.11 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.1g,未受損) ...160 表 5.12 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.1g,1 樓受損) ...161 表 5.13 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.1g,2 樓受損) ...161 表 5.14 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.1g,3 樓受損) ...161 表 5.15 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.1g,4 樓受損) ...162 表 5.16 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.1g,5 樓受損) ...162 表 5.17 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.1g,1、5 樓受 損) ...162 表 5.18 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.1g,1、3、5 樓受損) ...163 表 5.19 結構損傷探測分析之結果(Hachinohe 地震,PGA=0.1g)...163 表 5.20 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.05g,未受損)...163 表 5.21 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.05g,1 樓受損)...164 表 5.22 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.05g,2 樓受損)...164 表 5.23 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.05g,3 樓受損)...164 表 5.24 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.05g,4 樓受損)...165 表 5.25 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.05g,5 樓受損)...165 表 5.26 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.05g,1、5 樓受損)..165
xiii 表 5.27 五層樓鋼結構之結構參數(Kobe 地震,PGA=0.05g,1、3、5 樓受 損)...166 表 5.28 結構損傷探測分析之結果(Kobe 地震,PGA=0.05g)...166 表 5.29 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.05g,未受損) ...166 表 5.30 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.05g,1 樓受損) ...167 表 5.31 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.05g,2 樓受損) ...167 表 5.32 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.05g,3 樓受損) ...167 表 5.33 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.05g,4 樓受損) ...168 表 5.34 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.05g,5 樓受損) ...168 表 5.35 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.05g,1、5 樓 受損) ...168 表 5.36 五層樓鋼結構之結構參數(Hachinohe 地震,PGA=0.05g,1、3、5 樓受損) ...169 表 5.37 結構損傷探測分析之結果(Hachinohe 地震,PGA=0.05g)...169 表 5.38 結構損傷探測分析之結果(Kobe 地震 PGA=0.1g,1 樓受損, co-located observation)...169 表 5.39 結構損傷探測分析之結果(Kobe 地震 PGA=0.1g,2 樓受損, co-located observation) ...170 表 5.40 結構損傷探測分析之結果(Kobe 地震 PGA=0.1g,3 樓受損, co-located observation) ...170 表 5.41 結構損傷探測分析之結果(Kobe 地震 PGA=0.1g,4 樓受損, co-located observation) ...170 表 5.42 結構損傷探測分析之結果(Kobe 地震 PGA=0.1g,5 樓受損, co-located observation) ...171 表 5.43 結構損傷探測分析之結果(Kobe 地震 PGA=0.1g,1 及 5 樓受損, co-located observation) ...171 表 5.44 結構損傷探測分析之結果(Kobe 地震 PGA=0.1g,1、3 及 5 樓受損, co-located observation) ...172 表 5.45 結構損傷探測分析之結果(Kobe 地震 PGA=0.1g,not co-located
xiv
表 5.46 觀測不足以模態正交性重建未知模態向量(觀測樓層為 1、2、3 及 5 樓,Kobe 地震 PGA=0.1g,3 樓受損)...173 表 5.47 觀測不足以模態正交性重建未知模態向量(觀測樓層為 1、3、4 及
xv
圖目錄
圖 2.1 ETABS 五層樓鋼結構模型示意圖...175 圖 2.2 五層樓剪力屋架各樓層加速度歷時(Kobe 地震 PGA=0.1g,無雜訊) ...176 圖 2.3 五層樓剪力屋架各樓層加速度歷時(Kobe 地震 PGA=0.1g,NSR=5%) ...177 圖 2.4 五層樓剪力屋架各樓層加速度歷時(Kobe 地震 PGA=0.1g, NSR=10%)...178 圖 2.5 五層樓剪力屋架各樓層加速度歷時(Kobe 地震 PGA=0.1g, NSR=15%)...179 圖 2.6 五層樓剪力屋架各樓層加速度歷時(Kobe 地震 PGA=0.1g, NSR=20%)...180 圖 2.7 Case NSR00 之各振態頻率識別結果(無噪訊,N=3000)...181 圖 2.8 Case NSR05 之各振態頻率識別結果(噪訊比=5%,N=3000)...181 圖 2.9 Case NSR10 之各振態頻率識別結果(噪訊比=10%,N=3000)...182 圖 2.10 Case NSR15 之各振態頻率識別結果(噪訊比=15%,N=3000)...182 圖 2.11 Case NSR20 之各振態頻率識別結果(噪訊比=20%,N=3000)...183 圖 2.12 不同噪訊比之模態正交性誤差(n = )...184 5 圖 2.13 不同噪訊比之模態正交性誤差(n = ,n 為有效模態)...184 4 圖 2.14 不同震波下之模態正交性誤差(p=10,PGA=0.1g)...185 圖 3.1 五層樓結構解析模型(健康狀態)...186 圖 3.2 五層樓結構解析模型(一樓受損)...186 圖 3.3 破壞定位向量加載於結構示意圖(DLV=L1)...187 圖 3.4 破壞定位向量加載於結構示意圖(DLV=L2)...187 圖 4.1 DLV 損傷探測分析流程...188 圖 4.2 三層樓平面剪力屋架結構解析模型(健康狀態)...189 圖 4.3 三層樓平面剪力屋架結構解析模型(一樓受損狀態)...189 圖 4.4 破壞定位向量示意圖...190 圖 4.5 五層樓平面剪力屋架結構解析模型(健康狀態)...190 圖 4.6 各樓層加速度歷時(Kobe 地震,PGA=0.1g,未受損)...191 圖 4.7 各樓層加速度歷時(Kobe 地震,PGA=0.1g,1 樓受損)...192xvi 圖 4.8 各樓層加速度歷時(Kobe 地震,PGA=0.1g,2 樓受損)...193 圖 4.9 各樓層加速度歷時(Kobe 地震,PGA=0.1g,3 樓受損)...194 圖 4.10 各樓層加速度歷時(Kobe 地震,PGA=0.1g,4 樓受損)...195 圖 4.11 各樓層加速度歷時(Kobe 地震,PGA=0.1g,5 樓受損)...196 圖 4.12 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,單一樓層受損) ...197 圖 4.13 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,未受損)...198 圖 4.14 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,1 樓受損)...199 圖 4.15 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,2 樓受損)...200 圖 4.16 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,3 樓受損)...201 圖 4.17 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,4 樓受損)...202 圖 4.18 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,5 樓受損)...203 圖 4.19 結構損傷探測分析結果(Hachinohe 地震,PGA=0.1g,單一樓層受 損)...204 圖 4.20 各樓層加速度歷時(Kobe 地震,PGA=0.1g,1 及 5 樓受損)...205 圖 4.21 各樓層加速度歷時(Kobe 地震,PGA=0.1g,2 及 4 樓受損) ...206 圖 4.22 各樓層加速度歷時(Kobe 地震,PGA=0.1g,3 及 5 樓受損) ...207 圖 4.23 各樓層加速度歷時(Kobe 地震,PGA=0.1g,1、3 及 5 樓受損) ...208 圖 4.24 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,複數樓層受損)...209 圖 4.25 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,1 及 5 樓受損)...210 圖 4.26 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,2 及 4 樓受損)...211 圖 4.27 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,3 及 5 樓受損)...212 圖 4.28 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,1、3 及 5 樓受損) ...213 圖 4.29 結構損傷探測分析結果(Hachinohe 地震,PGA=0.1g,複數樓層受 損)...214 圖 4.30 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 樓不同程度損害) ...215 圖 4.31 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,2 樓不同程度損害) ...216 圖 4.32 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,3 樓不同程度損害) ...217 圖 4.33 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,4 樓不同程度損害)
xvii ...218 圖 4.34 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,5 樓不同程度損害) ...219 圖 4.35 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 及 5 樓不同程度 損害) ...220 圖 4.36 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,2 及 4 樓不同程度 損害) ...221 圖 4.37 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,3 及 5 樓不同程度 損害) ...222 圖 4.38 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1、3 及 5 樓不同 程度損害)...223 圖 4.39 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 樓受損,co-located observation)...224 圖 4.40 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,2 樓受損,co-located observation)...225 圖 4.41 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,3 樓受損,co-located observation) ...226 圖 4.42 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,4 樓受損,co-located observation) ...227 圖 4.43 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,5 樓受損,co-located observation) ...228 圖 4.44 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 及 5 樓受損, co-located observation)...229 圖 4.45 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,2 及 4 樓受損, co-located observation)...230 圖 4.46 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,3 及 5 樓受損, co-located observation)...231 圖 4.47 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1、3 及 5 樓受損, co-located observation)...232 圖 4.48 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 樓受損,not co-located observation) ...233 圖 4.49 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,2 樓受損,not co-located observation) ...234 圖 4.50 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,3 樓受損,not co-located observation) ...235 圖 4.51 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,4 樓受損,not co-located observation) ...236
xviii
圖 4.52 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,5 樓受損,not
co-located observation) ...237
圖 4.53 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 及 5 樓受損,not co-located observation) ...238
圖 4.54 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,2 及 4 樓受損,not co-located observation) ...239
圖 4.55 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,3 及 5 樓受損,not co-located observation) ...240 圖 4.56 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,以正交性重建未觀 測樓層模態向量) ...240 圖 5.1 振動台尺寸詳圖...241 圖 5.2 MTS 407 控制器...242 圖 5.3 IMCμ-MUCIS 資料擷取系統...242 圖 5.4 五層樓鋼構結構立面圖(單位:cm )...243 圖 5.5 五層樓鋼結構(未受損)...244 圖 5.6 五層樓鋼結構(二樓受損,移除二樓雙邊斜撐)...244 圖 5.7 各樓層加速度歷時(Kobe 地震,PGA=0.1g,未受損)...245
圖 5.8 ARX 識別法之加速度傳遞函數(Kobe 地震,PGA=0.1g,未受損)...246
圖 5.9(a) ETABS 特徵分析之模態(健康結構)...247
圖 5.9(b) SRIM 識別之模態(健康結構)...247
圖 5.10 各樓層加速度歷時(Kobe 地震,PGA=0.1g,1 樓受損)...248
圖 5.11 ARX 識別法之加速度傳遞函數(Kobe 地震,PGA=0.1g,1 樓受損) ...249
圖 5.12(a) ETABS 特徵分析之模態(1 樓受損)...250
圖 5.12(b) SRIM 識別之模態(1 樓受損) ...250
圖 5.13 各樓層加速度歷時(Kobe 地震,PGA=0.1g,2 樓受損)...251
圖 5.14 ARX 識別法之加速度傳遞函數(Kobe 地震,PGA=0.1g,2 樓受損) ...252
圖 5.15(a) ETABS 特徵分析之模態(2 樓受損) ...253
圖 5.15(b) SRIM 識別之模態(2 樓受損) ...253
圖 5.16 各樓層加速度歷時(Kobe 地震,PGA=0.1g,3 樓受損)...254
圖 5.17 ARX 識別法之加速度傳遞函數(Kobe 地震,PGA=0.1g,3 樓受損) ...255
xix
圖 5.18(b) SRIM 識別之模態(3 樓受損)...256
圖 5.19 各樓層加速度歷時(Kobe 地震,PGA=0.1g,4 樓受損)...257
圖 5.20 ARX 識別法之加速度傳遞函數(Kobe 地震,PGA=0.1g,4 樓受損) ...258
圖 5.21(a) ETABS 特徵分析之模態(4 樓受損)...259
圖 5.21(b) SRIM 識別之模態(4 樓受損)...259
圖 5.22 各樓層加速度歷時(Kobe 地震,PGA=0.1g,5 樓受損)...260
圖 5.23 ARX 識別法之加速度傳遞函數(Kobe 地震,PGA=0.1g,5 樓受損) ...261
圖 5.24(a) ETABS 特徵分析之模態(5 樓受損)...262
圖 5.24(b) SRIM 識別之模態(5 樓受損)...262
圖 5.25 各樓層加速度歷時(Kobe 地震,PGA=0.1g,1 及 5 樓受損)...263
圖 5.26 ARX 識別法之加速度傳遞函數(Kobe 地震,PGA=0.1g,1 及 5 樓受 損) ...264
圖 5.27(a) ETABS 特徵分析之模態(1 及 5 樓受損)...265
圖 5.27(b) SRIM 識別之模態(1 及 5 樓受損) ...265
圖 5.28 各樓層加速度歷時(Kobe 地震,PGA=0.1g,1、3、5 樓受損)...266
圖 5.29 ARX 識別法之加速度傳遞函數(Kobe 地震,PGA=0.1g,1、3 及 5 樓受損)...267 圖 5.30(a) ETABS 特徵分析之模態(1、3 及 5 樓受損) ...268 圖 5.30(b) SRIM 識別之模態(1、3 及 5 樓受損) ...268 圖 5.31 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,單一樓層受損)....269 圖 5.32 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,複數樓層受損)...270 圖 5.33 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,未受損)...271 圖 5.34 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,1 樓受損)...272 圖 5.35 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,2 樓受損)...273 圖 5.36 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,3 樓受損)...274 圖 5.37 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,4 樓受損)...275 圖 5.38 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,5 樓受損)...276 圖 5.39 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,1、5 樓受損)...277 圖 5.40 各樓層加速度歷時(Hachinohe 地震,PGA=0.1g,1、3、5 樓受損)....278 圖 5.41 結構損傷探測分析結果(Hachinohe 地震,PGA=0.1g,單一樓層受 損)...279
xx 圖 5.42 結構損傷探測分析結果(Hachinohe 地震,PGA=0.1g,複數樓層受 損) ...280 圖 5.43 各樓層加速度歷時(Kobe 地震,PGA=0.05g,未受損)...281 圖 5.44 各樓層加速度歷時(Kobe 地震,PGA=0.05g,1 樓受損) ...282 圖 5.45 各樓層加速度歷時(Kobe 地震,PGA=0.05g,2 樓受損) ...283 圖 5.46 各樓層加速度歷時(Kobe 地震,PGA=0.05g,3 樓受損) ...284 圖 5.47 各樓層加速度歷時(Kobe 地震,PGA=0.05g,4 樓受損) ...285 圖 5.48 各樓層加速度歷時(Kobe 地震,PGA=0.05g,5 樓受損) ...286 圖 5.49 各樓層加速度歷時(Kobe 地震,PGA=0.05g,1、5 樓受損)...287 圖 5.50 各樓層加速度歷時(Kobe 地震,PGA=0.05g,1、3、5 樓受損)...288 圖 5.51 結構損傷探測分析結果(Kobe 地震,PGA=0.05g,單一樓層受損) ...289 圖 5.52 結構損傷探測分析結果(Kobe 地震,PGA=0.05g,複數樓層受損) ...290 圖 5.53 各樓層加速度歷時(Hachinohe 地震,PGA=0.05g,未受損)...291 圖 5.54 各樓層加速度歷時(Hachinohe 地震,PGA=0.05g,1 樓受損)...292 圖 5.55 各樓層加速度歷時(Hachinohe 地震,PGA=0.05g,2 樓受損)...293 圖 5.56 各樓層加速度歷時(Hachinohe 地震,PGA=0.05g,3 樓受損)...294 圖 5.57 各樓層加速度歷時(Hachinohe 地震,PGA=0.05g,4 樓受損)...295 圖 5.58 各樓層加速度歷時(Hachinohe 地震,PGA=0.05g,5 樓受損)...296 圖 5.59 各樓層加速度歷時(Hachinohe 地震,PGA=0.05g,1、5 樓受損)...297 圖 5.60 各樓層加速度歷時(Hachinohe 地震,PGA=0.05g,1、3、5 樓受損) ...298 圖 5.61 結構損傷探測分析結果(Hachinohe 地震,PGA=0.05g,單一樓層受 損) ...299 圖 5.62 結構損傷探測分析結果(Hachinohe 地震,PGA=0.05g,複數樓層受 損) ...300 圖 5.63 結構損傷探測分析結果(輸入 1、輸出 4,Kobe 地震,PGA=0.1g, 1 樓受損,co-located observation)...300 圖 5.64 結構損傷探測分析結果(輸入 1、輸出 3,Kobe 地震,PGA=0.1g, 1 樓受損,co-located observation)...301 圖 5.65 結構損傷探測分析結果(輸入 1、輸出 4,Kobe 地震,PGA=0.1g, 2 樓受損,co-located observation) ...302 圖 5.66 結構損傷探測分析結果(輸入 1、輸出 3,Kobe 地震,PGA=0.1g,
xxi 2 樓受損,co-located observation) ...303 圖 5.67 結構損傷探測分析結果(輸入 1、輸出 4,Kobe 地震,PGA=0.1g, 3 樓受損,co-located observation) ...304 圖 5.68 結構損傷探測分析結果(輸入 1、輸出 3,Kobe 地震,PGA=0.1g, 3 樓受損,co-located observation) ...305 圖 5.69 結構損傷探測分析結果(輸入 1、輸出 4,Kobe 地震,PGA=0.1g, 4 樓受損,co-located observation) ...306 圖 5.70 結構損傷探測分析結果(輸入 1、輸出 3,Kobe 地震,PGA=0.1g, 4 樓受損,co-located observation) ...307 圖 5.71 結構損傷探測分析結果(輸入 1、輸出 4,Kobe 地震,PGA=0.1g, 5 樓受損,co-located observation) ...308 圖 5.72 結構損傷探測分析結果(輸入 1、輸出 3,Kobe 地震,PGA=0.1g, 5 樓受損,co-located observation) ...309 圖 5.73 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 及 5 樓受損, co-located observation) ...310 圖 5.74 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,1 樓、3 樓及 5 樓 受損,co-located observation) ...311 圖 5.75 結構損傷探測分析結果(Kobe 地震,PGA=0.1g,not co-located
1
第一章 緒論
1.1 前言
近年來全球大地震不斷,震害之嚴重程度更是不斷上修。如台灣 九二一地震(1999,規模 7.3)、南亞地震(2005,規模 9.0)、中國汶川 地震(2008,規模 8.0)、海地地震(2010,規模 7.0)、智利地震(2010, 規模 8.8)、紐西蘭基督城地震(2011,規模 6.3 的淺層地震)、日本東 北大地震(2011,規模 9.0)等,均造成許多結構物或重要設施嚴重受 損,人命的傷亡及難以估計的財產損失。有鑑於此,如何在地震後快 速且有效的準確偵測出結構受損位置,評估其損傷程度,及時予以加 勁補強,以維持結構之耐震安全性,乃地震工程研究之重要課題。特 別是台灣科技產業飽受震害之苦【1-3】,尤以 TFT-LCD 產業為甚。 只要三級以上的地震,大型面板廠動輒要損失上億台幣【4】。相較 於沒有地震的韓國三星集團,台灣的業者必須承擔更大的營運風險。 如 何 在 地 震 後 快 速 進 行 廠 房 的 結 構 健 康 診 斷(Structural Health Monitoring),及時確認廠房結構安全,或採取修復補強措施,乃國內 科技業者降低震害風險,維繫產業競爭力所迫切需要的技術服務。國 內產學界應合作發展一套適用於科技廠房結構損傷定位的先進技 術,整合動態反應監測、系統識別(System Identification)與損傷探測 (Damage Detection)等技術,針對廠房之地震反應監測資料進行分析,2
由 結 構 之 全 域 反 應 (Global Response) 定 位 出 局 部 受 損 (Local Damage),以作為廠房結構安全評估與耐震補強設計的科學依據。
結構健康診斷(Structural health monitoring)為近年來土木工程— 特別是地震工程領域,極受重視的研究課題之一。結構破壞偵測觀念 之啟蒙和技術發展,初期為軍事與航太工業上的需求,針對機械設備 的故障進行診斷,後來逐漸廣泛應用於其他領域。結構破壞偵測之宗 旨乃基於不破壞結構或材料之前提下,對損傷位置及程度進行有效的 識別。結構健康診斷系統須以成熟的動態試驗、動態監測、系統識別 及損傷探測等技術為基礎,配合適當的健康診斷指標作為評估依據, 方能克竟其功。在動態試驗方面,因建築結構規模龐大,人為敲擊或 激振測試因輸入的能量有限,鮮能有效激發結構主要振態之反應。地 震是大自然提供結構動態反應最有效的足尺試驗,它所提供的擾動能 量遠超過任何人為測試方法,足以將結構動態行為激發出來,乃結構 系統識別分析最可靠的資料來源,本研究逐以震測資料為分析的基 礎;在動態反應監測方面,由於加速度的量測不需參考點,且加速規 的體積小、質量輕、成本低,因此比位移及速度等物理量更適合作為 監測對象;在系統識別方面,應儘可能選擇所需資料最少、直接應用 量測訊號(不必再經數值微分或積分等加工)的方法;在損傷探測方 面,則須選擇對結構的損傷有高度敏感性,不需仰賴高頻振態資訊(因
3 不易被激發),且能由全域反應定位出局部破壞的方法。本研究擬整 合能夠滿足前述要件之方法,發展具備嚴謹之理論基礎與實用價值的 結構損傷探測技術。 在結構損傷探測的研究上,尹世洵【5-6】在結構系統內加入非 線性回饋迴圈,使系統產生分歧行為(bifurcation),達到渾沌狀態,並 利用系統在渾沌狀態下對參數敏感的特性,以概率密度函數的形狀和 大小不同,判別損害位置與損害程度。王淑娟【7】根據推廣卡氏過 濾理論識別台電大樓,其利用單一輸入-單一輸出與雙向輸入-單一輸 出之兩種識別模式進行結構參數識別。謝豪駿【8】利用小波變換具 有表徵信號局部特徵的優點和古典結構模態參數辨識方法-分量分析 法,對梁結構損傷後之模態振形向量進行小波變換係數之奇異性檢 測,可清楚地對損傷或奇異性位置進行定位。楊淳皓【9】以 SRIM 系 統識別為基礎,發展扭轉耦合建築結構受震前後層間勁度折減比例之 層間損壞指標,同時考慮損壞前後偏心變化,以判別樓層之平面損壞 位置。 勁度矩陣似乎是與結構受損最直接相關的物理參數。惟結構勁度 矩陣的組成中,高頻振態的貢獻度相當大,然而卻不易由振動反應中 萃取出來,間接也影響了勁度矩陣的精確性。相對而言,柔度矩陣主
4
要由低頻振態所貢獻,因而較容易識別出來。因此,以柔度矩陣為基 礎的結構損傷探測方法具備極佳的發展潛力。Pandey and Biswas 【10-11】針對梁與桁架結構模型,由結構受損前與受損後之柔度矩 陣變化(changes in the flexibility)來作為損傷指標。Bernal【12】於 2002 年提出以柔度矩陣之變化為基礎的破壞定位向量法(Damage Locating Vectors,簡稱 DLV 法),依其訂定之指標作為破壞偵測判斷的依據。 該研究針對平面桁架結構進行分析,探討多重破壞位置及破壞程度之 損傷識別,結果顯示DLV 法可正確研判出破壞位置。Duan【13-14】 針對彈簧質塊系統與平面桁架結構,以 DLV 法進行結構損傷探測, 並考慮使用的模態數量對於識別分析結果的影響。其研究指出當結構 有兩處破壞位置時,使用前二、三模態可正確偵測出破壞位置。林裕 家【15】透過數值模擬與試驗,針對剪力構架與桁架結構以 DLV 損 傷識別方法進行全域性損害偵測,再進行局部性損害偵測。此研究驗 證DLV 損傷識別方法可準確地偵測出框架結構之損害位置。凃哲維 【16】利用 ARX 模型以 DLV 損傷探測法針對抗彎構架系統的損傷 問題進行一系列的數值模擬分析,並使用振動台試驗驗證,其研究結 果進一步驗證 DLV 損傷識別法應用於抗彎構架系統之損傷探測上 確屬可行。陳逸軒【17】利用 ARX 模型以 DLV 損傷探測法在有限 觀測的條件下定位出結構損傷位置,並以模態向量間之正交特性,重
5 建出結構系統各主要模態之特徵向量,做為建立柔度矩陣以及結構損 傷探測分析的基礎,亦完成數值範例及振動台試驗驗證其可行性。惟 其研究之結論亦指出,即使在足量觀測(full observation)條件下,系統 識別所得之各模態間的正交性並不理想,導致在觀測不足的情況下, 部分DLV 損傷探測分析結果的不確定性。究其原因,應為 ARX 法【18】 僅能萃取出結構之模態參數,建立柔度矩陣時質量矩陣須為已知。模 態正交性是基於質量矩陣為已知的前提所建立,一旦質量矩陣失真, 模態正交性自然就不理想,進而影響柔度矩陣的精度以及損傷探測的 判別結果。為克服這個困難,吾人須採用更先進的系統識別方法,避 免過多的前提限制,影響分析方法的可靠度。 Bernal【19】於 2006 年提出在狀態空間系統下建立 DLV 法,仍 以柔度矩陣之變化為基礎找出破壞定位向量(本文稱之為狀態空間 DLV 法)。由於結構係於狀態空間系統所建立,其柔度矩陣乃內含於 系統矩陣內,位移與輸入外力之傳遞函數(transfer function)在頻率為 零(即 Laplace variable s=0)時即為結構之柔度矩陣。因此,只要能識 別 出 狀 態 方 程 式(state equation) 及 其 對 應 之 輸 出 方 程 式 (output equation)的相關參數,就能建立系統之柔度矩陣。Juang【20】於 1997 年提出信息矩陣之系統辨識理論(system realization using information matrix;簡稱 SRIM),可針對多重輸入-多重輸出系統進行分析,適用
6
於複雜的結構模型。其主要概念為透過輸出與輸入資料之間的相關性 (correlation)建立自相關矩陣(autocorrelation matrices)與互相關矩陣 (cross-correlation matrices) , 組 成 信 息 矩 陣 , 進 而 由 可 觀 測 矩 陣 (observability matrix)與 Toeplitz 矩陣萃取出系統之狀態空間參數,從 而識別出結構之頻率、阻尼比及模態等動力特性參數。這個系統識別 方法正好可用來建立狀態空間 DLV 法所需之系統參數。本研究將以 SRIM 取代 ARX 法,針對剪力架構結構之地震反應資料進行系統識 別,並結合狀態空間 DLV 法進行結構損傷探測研究。經由數值模擬 分析之驗證以及一系列振動台地震模擬試驗,證明本研究所提出之方 法可由結構全域之地震反應定位出局部損傷位置,作為未來實際應用 的基礎。
1.2 論文構架
本論文共分為六章,各章內容如下所述:第一章為緒論,介紹研 究動機與目的、文獻回顧及論文架構。第二章將介紹SRIM 識別法, 介紹如何以輸入輸出資料之相關性重建結構系統之狀態系統參數,並 萃取頻率、模態與阻尼比等模態參數的方法與驗證。第三章將介紹狀 態空間 DLV 損傷識別法之原理與應用。第四章以數值模擬分析驗證 狀態空間 DLV 損傷識別法之可行性,考慮結構不同破壞之型式,不 同破壞程度之靈敏度分析。此外,亦針對結構多重破壞以及觀測不足7
的條件下作分析。第五章以振動台試驗驗證狀態空間 DLV 損傷探測 法於實際應用之可行性。第六章為結論與建議。
8
第二章
SRIM 系統識別分析討論
2.1 前言
無論是結構損傷評估或預估結構受地震作用之行為,都須先求得 結構系統之參數,包括模態參數。吾人可利用系統識別之技巧,經由 實際量測到之結構動態反應與輸入擾動,推算出結構系統的參數,如 自然頻率、阻尼比及模態等,或更進一步萃取出結構之阻尼、勁度矩 陣,作為後續分析之依據。 Juang【20】於 1997 年提出信息矩陣之系統辨識理論(system realization using information matrix;簡稱 SRIM)。此一方法利用資料 之相關性(data correlation),由輸出與輸入資料在狀態空間系統之架構 下,由可觀測矩陣(observability matrix)與 Toeplitz 矩陣決定結構系統 之狀態空間矩陣(A、B、C 與 D),可進而推算系統之模態參數,並用 於後續之結構損傷探測分析。本章將說明如何利用震測資料以 SRIM 法進行系統識別求得結 構系統之A與C矩陣,進而萃取出系統頻率、阻尼比與模態等模態參 數。此外,並探討SRIM 識別時最佳的參數設定以及雜訊之影響。
9
2.2 SRIM 系統識別理論回顧
考慮結構系統為 n 個自由度,在受外力作用下,以二階常微分方 程式表示為: Mx&&(t)+ &Ξx(t)+Kx(t) =Eu(t) (2.1) 其中,M 、Ξ及K分別為Rn×n之質量、阻尼及勁度矩陣; ) (t x&& 、x&(t)與x(t)分別為Rn×1之結構加速度、速度與位移向量; 1 ) (t ∈Rr× u 為外力向量,r 為外力輸入之數量; r n R × ∈ E 為外力配置矩陣,其矩陣元素取決於外力之分佈。 將式(2.1)以一階矩陣微分方程式表示: ( ) ) ( ) ( ) ( ) ( ) ( 1 1 1 t t t t t t u E M 0 x x Ξ M K M I 0 x x z ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = − − − & && & & (2.2) 定義狀態向量z(t)為: ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = ) ( ) ( ) ( t t t x x z & (2.3) 將式(2.2)改寫成: z&(t) =Acz(t)+Bcu(t) (2.4) 其中, ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = − − Ξ M K M I 0 Ac 1 1 , ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = − E M 0 Bc 1 ; 1 2 ) (t ∈R n× z 為連續時間之狀態向量; n n c R 2 2 × ∈ A 為連續時間之系統矩陣;10 r n c R × ∈ 2 B 為連續時間之輸入影響矩陣。 定義輸出向量y(t),由位移向量x(t)、速度向量x&(t)與加速度向量 ) (t x&& 所組成如下: y(t)=CDx(t)+CVx&(t)+CAx&&(t) (2.5) 其中,CD、CV與CA分別為Rm×n之位移、速度與加速度輸出影響矩陣。 由式(2.1)求解x&&(t)並代入式(2.5)可得:
[
]
( ) ) ( ) ( ) ( 1 1 1 t t t t D A V A CAM Eu x x Ξ M C C K M C C y − − + − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = & (2.6) 可改寫為: y(t) =Cz(t)+Du(t) (2.7) 其中,C=[C −C M−1K C −C M−1Ξ] A V A D ,D C M E 1 − = A ; 1 ) (t ∈Rm× y 為輸出向量,m 為感應器之數量; n m R ×2 ∈ C 為狀態輸出影響矩陣; r m R × ∈ D 為直接傳輸矩陣。 由於實際量測資料為離散之型式,故須將連續時間之狀態空間方 程式推展為離散時間之型式。令k =kΔt(Δt為取樣週期),其離散時間 之狀態空間方程式可表示成: z(k+1) =Az(k)+Bu(k) (2.8) y(k)=Cz(k)+Du(k) (2.9)11 其中,z(k)∈R2n×1為離散時間之狀態向量; 1 ) (k ∈Rr× u 為外力輸入向量; 1 ) (k ∈Rm× y 為輸出觀測向量; n n R2 ×2 ∈ A 為離散時間之系統矩陣; r n R × ∈ 2 B 為離散時間之輸入影響矩陣。 若取樣頻率高於最大等效阻尼自然頻率之兩倍,則連續時間系統 與離散時間系統式,兩者可相互轉換: A =eAcΔt, t c = Δ ) ln(A A (2.10) B =Ac−1(A−I)Bc ,Bc =(A−I)−1AcB (2.11) 將式(2.8)疊代 p 次,代入式(2.9),以矩陣型式表示: ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + + + ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + + + − − − − ( 1) ) 2 ( ) 1 ( ) ( ) ( ) 1 ( ) 2 ( ) 1 ( ) ( 4 3 2 1 2 p k k k k k p k k k k p p p p u u u u D B CA B CA B CA D CB CAB D CB D z CA CA CA C y y y y M L O M M M M M (2.12) 可改寫為: yp(k)=Opz(k)+Tpup(k) (2.13) 其中, 1 ) 1 ( ) 2 ( ) 1 ( ) ( ) ( ∈ × ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + + + = mp p R p k k k k k y y y y y M , 1 ) 1 ( ) 2 ( ) 1 ( ) ( ) ( ∈ × ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + + + = rp p R p k k k k k u u u u u M
12 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = −1 2 p p CA CA CA C O M , ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = − − − B CA B CA B D CA D CB CAB D CB D T L O M M M 4 3 2 p p p p n mp p R 2 × ∈ O 為可觀測性矩陣(observability matrix); rp mp p R × ∈ T 為 Toeplitz 矩陣,由馬可夫參數組成; p 為疊代次數。 狀態空間系統之結構參數 A 矩陣、C 矩陣即隱含於Op矩陣中, 此乃萃取 A 與 C 矩陣之關鍵。以 k+1 為起點,將式(2.8)疊代 p 次至 式(2.9),重複至 k+N-1 為起始點(共 N 次),可得式(2.14)之擴大型式: Yp(k)=OpZ(k)+TpUp(k) (2.14) 其中, N mp p p p p R N p k p k p k N k k k N k k k N k k k k × ∈ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + + + − + + + + − + + = − + + = ) 2 ( ) ( ) 1 ( ) ( ) 2 ( ) 1 ( ) 1 ( ) 1 ( ) ( ] ) 1 ( ) 1 ( ) ( [ ) ( y y y y y y y y y y y y Y L M O M M L L L N rp p p p p R N p k p k p k N k k k N k k k N k k k k × ∈ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + + + − + + + + − + + = − + + = ) 2 ( ) ( ) 1 ( ) ( ) 2 ( ) 1 ( ) 1 ( ) 1 ( ) ( ] ) 1 ( ) 1 ( ) ( [ ) ( u u u u u u u u u u u u U L M O M M L L L
[
k k k N]
R n N k) = ( ) ( +1) ( + −1) ∈ 2 × ( z z z Z L13 N 之最大值為資料長度減 p,Yp(k)與Up(k)皆由已知的輸出與輸 入量測資料組成,藉由兩者之相關性可求得Op矩陣。 各自相關(autocorrelation)與互相關(cross-correlation)矩陣定義如 下: (1/N) (k) T(k) p p yy Y Y R = (1/N) (k) T(k) p p yu Y U R = (1/N) (k) T(k) p p uu U U R = (1/N) (k) T(k) p yz Y Z R = (2.15) (1/N) (k) T(k) zz Z Z R = (1/N) (k) T(k) p zu Z U R = 其中,對稱矩陣 mpmp yy R × ∈ R 、 rp rp uu R × ∈ R 與 n n zz R 2 2 × ∈ R 分別為輸出觀測 矩陣Yp(k)、輸入矩陣Up(k)及未知狀態矩陣Z(k)的自相關矩陣;矩陣 rp mp yu R × ∈ R 、 mp n yz R 2 × ∈ R 與 n rp zu R × ∈ 2 R 分別為輸出觀測矩陣Yp(k)對於 輸入矩陣Up(k)、輸出觀測矩陣Yp(k)對於未知狀態矩陣Z(k)矩陣及未 知狀態矩陣Z(k)矩陣對於輸入矩陣Up(k)矩陣的互相關矩陣。 2.2.1 萃取系統矩陣 z A、C 矩陣 由式(2.14)左右兩邊乘上(1/N) T(k) p U 可得: Ryu =OpRzu +TpRuu (2.16) 若Ruu−1為非奇異矩陣,則由式(2.16)可得: =[ − ] −1 uu zu p yu p R O R R T (2.17)
14 同樣地,於式(2.14)左右兩邊乘上(1/N) T(k) p Y 可得: T yu p T yz p yy O R T R R = + (2.18) 又於式(2.14)左右兩邊乘上(1/N)ZT(k)可得: T zu p zz p yz O R T R R = + (2.19) 將式(2.17)之Tp代入式(2.18)與式(2.19)移項整理後可得: T p T zu uu zu zz p T yu uu yu yy R R R O R R R R O R − −1 = ( − −1 ) (2.20) 茲定義 T yu uu yu yy hh R R R R R = − −1 , T zu uu zu zz zz R R R R R~ = − −1 則式(2.20)可簡化為: T p zz p hh O R O R = ~ (2.21) 對 mp mp hh R × ∈
R 作奇異值分解(singular value decomposition;簡稱 SVD):
[
]
n[
n]
n n n n hh V V U S V S S U U USV R T T = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = = 0 0 0 0 0 (2.22) 其中, mp n n R 2 × ∈ U 為 T hh hhR R 之非零特徵值所對應之左側單位特徵向量; 0 0 n mp R × ∈ U 為 T hh hhR R 之零特徵值所對應之左側單位特徵向量, n mp n0 = −2 ; n n n R 2 2 × ∈ S 為 T hh hhR R 之非零奇異值所組成之對角矩陣; 0 0 0 n n R × ∈ S 為 T hh hhR R 之 理 想 零 奇 異 值 所 組 成 之 對 角 矩 陣 ; n mp n R 2 × ∈ V 為 T hh hhR R 之非零特徵值所對應之右側單位特徵向量; 0 0 n mp R × ∈ V 為 T hh hhR R 之零特徵值所對應之右側單位特徵向量。15 比較式(2.21)與式(2.22)可知: Op =Un (2.23) 以及 R~zz =Sn (2.24) 因此,可由Rhh矩陣之奇異值分解(SVD)求得可觀測性矩陣Op, 此為求取A 與 C 矩陣之關鍵。以下將以 MATLAB 語法說明如何由Op 矩陣求取A 與 C 矩陣: ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + −1 3 2 :) , : 1 ( p p m pm CA CA CA CA O M , ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = − −2 2 :) , ) 1 ( : 1 ( p p p m CA CA CA C O M (2.25) 其中,Op(m+1: pm,:)代表第m+1 至 pm 列和所有行向量組成之矩陣; :) , ) 1 ( : 1 ( p m p − O 代表第1 至(p-1)×m 列和所有行向量所組成之矩 陣。 將式(2.25)改寫成: A O A CA CA CA C CA CA CA CA O ( 1: ,:) (1:( 1) ,:) 2 2 1 3 2 m p pm m p p p p = − ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + − − M M (2.26) 由式(2.26)可求得 A 矩陣: A =O∗p(1:(p−1)m,:)Op(m+1: pm,:) (2.27)
16 其中, T n p m p p T p p p m p m p m R ) 1 ( 2 1 (1:( 1) ,:) :)] , ) 1 ( : 1 ( :) , ) 1 ( : 1 ( [ − × − ∗ = O − O − O − ∈ O 為 p O 的 偽 逆(pseudoinverse) 矩 陣 , 而 整 數 p 之 最 小 值 , 則 需 滿 足 :) , ) 1 ( : 1 ( p m p − O 的秩(rank)等於或大於 2n: ( −1) ≥2 ⇒ ≥ 2 +1 m n p n m p (2.28) 觀察Op矩陣可知,其前m 列為即 C 矩陣: C=Op(1:m,:) (2.29) z B、D 矩陣 觀察式(2.13)之Tp矩陣,可知系統矩陣B與D即隱含於其中。 將式(2.16)前乘 T 0 U 可得: p uu T zu p T yu TR U O R U T R U0 = 0 + 0 (2.30) 由於Op =Un,且根據 T 0 U 與Un之正交性可得: p uu T yu TR U T R U0 = 0 (2.31) 將式(2.31)後乘 −1 uu R 可改寫成: 0 0 1 − = T yu uu p TT U R R U (2.32) 將未知之Tp矩陣分成p 個子矩陣: Tp =[Tp(:,1:r) Tp(:,r+1:2r) L Tp(:,(p−1)r+1:pr)] (2.33) 其中,由式(2.13)之Tp矩陣與式(2. 23)可推得:
17 ⎥⎦ ⎤ ⎢ ⎣ ⎡ = + − ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = + ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = × − × × D 0 T B U D 0 T B U D 0 T B U D T r m p p n r m p n r m p n p pr r p m p r r m p r r m p r ) 1 ( 2 ] : 1 ) 1 ( [:, :] , ) 3 ( : 1 [ ) 3 : 1 2 (:, :] , ) 2 ( : 1 [ ) 2 : 1 (:, :] , ) 1 ( : 1 [ ) : 1 (:, M (2.34) 再將式(2.34)前乘 T 0 U 改寫成: D U T U B U U D U T U B U U D U T U B U U D U T U ] : 1 ) 1 ( [:, ] : 1 ) 1 ( [:, :] , ) 3 ( : 1 [ ) : 1 3 (:, ) 3 : 1 2 (:, ) 3 : 1 2 (:, :] , ) 2 ( : 1 [ ) : 1 2 (:, ) 2 : 1 (:, ) 2 : 1 (:, :] , ) 1 ( : 1 [ ) : 1 (:, ) : 1 (:, ) : 1 (:, 0 0 0 0 0 0 0 0 0 0 0 pm m p pr r p m p pm m m m r r m p pm m m m r r m p pm m m r T p T n T T p T n T T p T n T T p T + − = + − − + + + = + − + + + = + − + + = M (2.35) 或 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = B D U U0T 0n (2.36) 其中, ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + + = ] : 1 ) 1 ( [:, ) 3 : 1 2 (:, ) 2 : 1 (:, ) : 1 (:, 0 0 0 0 0 pr r p r r r r r p T p T p T p T T T U T U T U T U U M (2.37)
18 ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + − + − + + − + + = 0 U U U U U U U U U U U M M :] , ) 3 ( : 1 [ ) : 1 3 (:, :] , ) 2 ( : 1 [ ) : 1 2 (:, :] , ) 1 ( : 1 [ ) : 1 (:, ] : 1 ) 1 ( [:, ) 3 : 1 2 (:, ) 2 : 1 (:, ) : 1 (:, 0 0 0 0 0 0 0 0 m pm p m m p pm m m p pm m pm m p m m m m m n T n T n T T T T T n (2.38) 由於Tp為未知矩陣,因此式(2.37)中之UTΤp 0 亦未知矩陣。茲根據 式(2.32)將其改寫為: ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + + = − − − − ] : 1 ) 1 ( [:, ) 3 : 1 2 (:, ) 2 : 1 (:, ) : 1 (:, 1 0 1 0 1 0 1 0 0 pr r p r r r r r uu yu T uu yu T uu yu T uu yu T T R R U R R U R R U R R U U M (2.39) 即可求得B與D矩陣;亦即: T n 0 * 0 U U B D = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ (2.40) 其中,前m列即矩陣為D∈Rm×r,最後2n列即矩陣為B∈R2n×r; 0 ) 2 ( 0 1 0 0 * 0 ( ) pn n m T n n T n n R × + − ∈ = U U U U 為 U0n 之 擬 逆(pseudoinverse) 矩 陣。 2.2.2 萃取系統模態參數 由於在狀態空間法中,結構參數隱含於 A 與 C 矩陣,因此吾人 只需識別出 A 與 C 矩陣,便可計算求得結構系統之自然頻率、阻尼 比與模態等參數。
19 對A 矩陣進行特徵分析可得: AΨ=ΨΛ (2.41) 其中, ] [ψ1,ψ2,Kψ2n = Ψ , ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = n 2 1 0 0 λ λ L M M M M M K Λ (2.42) n n R2 ×2 ∈ Ψ 為特徵向量組成之矩陣; n n R2 ×2 ∈ Λ 為特徵值所組成之對角矩陣。 特徵向量Ψ為系統之模態向量矩陣,可經由C 矩陣將其轉換至輸 出座標上,即可求得降階系統之模態向量矩陣: Φ=CΨ (2.43) 其中,Φ∈Rm×2n。 結構系統之自然頻率與阻尼比,可由Λc的實部與虛部求得,將Λ 轉換為Λc如下: t c = Δ ) ln(Λ Λ ,Λc =diag(λc,1,λc,2,Lλc,2n) (2.44) 其中, 2 ,i i i i i i 1 i c α jβ ξω jω ξ λ = ± =− ± − (2.45) i ω 為系統第 i 模態之自然頻率; i ξ 為系統第 i 模態之阻尼比。 由式(2.45)可解得ωi與ξi: 2 2 i i i α β ω = + (2.46)