以全特徵模態展開法分析大角度、單方向傳播之緩變介電質波導
104
0
0
全文
(2)
(3)
(4)
(5) 誌. 謝. 本篇論文的完成,首先要感謝我的指導教授 張弘文博士,在他 悉心的教導之下,使我可以在數值理論的基礎上紮根,並且對於論文 理論以及程式方面給予多方的協助,並使我在對學習研究以及為人處 事上獲益良多。另外還要感謝所上的老師在學業上所提供的協助,由 於他們的教誨,使我獲得不少知識以及幫助。 同時要感謝在實驗室中的二位博士班學長程偉麒、劉先墉,碩士 班學長黎聯群,兩年來照顧我的學業以及生活的照顧,同時在作論文 過程時更是提供了不少寶貴的建議,也感謝學弟世敏、聲州、健華在 口試期間的幫忙,讓我能安心準備口試。 最後要感謝我父母辛苦的養育和栽培,以及我哥哥的熱切指導, 有了他們在背後的大力支持,我才能夠完成碩士學業以及論文研究。 本論文感謝國立中山大學發展國際一流大學及頂尖研究中心計 畫和國科會-特殊數值方法在積體光學圓柱座標的分析及應用(NSC 94-2215-E-110-012)的贊助。. 楊昇默 2007. 06 于西子灣. I.
(6) 中文摘要 積體光學中有許多大角度、單方向傳播之緩變介電質波導。如彎 曲波導、多模干涉器(MMI)、錐型波導(tapered waveguide)、階梯陣列 順向耦合器(GADC)等,他們都是集成光器件中不可缺少的部分。波 導的側向位移和連接都需要很多的彎曲波導來實現。 而現今用來分析光電元件最佳化的近似方法有光束傳播法 (BPM)、時域有限差分法 (FD-TD)、頻域有限差分法(FD-FD)等。有 別於光束傳播法沒有辦法計算大角度且計算結果不是很準確、時域有 限差分法、頻域有限差分法雙向傳播使用大量的計算,因此,此篇論 文中我們修改(couple transverse mode integral equation ,CTMIE) 僅考慮所有角度、單方向傳播近似,我們稱做全特徵模態展開法 (full eigenmode expansion technique, FEMET)來分析各角度彎曲波導傳播 及輻射損耗。FEMET 不需解代數聯立方程式、可大量降低計算量。 最後我們用 FEMET 來計算傾斜直線波導,來驗正其 FEMET 的精 確性。. II.
(7) Effectiveness of full eigen-mode expansion technique for studying adiabatic dielectric waveguides with wide-angle one-way traffic Abstract In integrated optics, there are many adiabatic dielectric waveguides. Examples include bending waveguides, multi-mode interferometers (MMI), taper waveguides, grating assisted directional couplers (GADC), etc.. Among these waveguide devices, adiabatic bending waveguides are. the most important basic devices. They are used to connect various vertical or horizontally displaced waveguides. There are many approximate methods such as the beam propagation method (BPM), finite-difference time-domain, (FD-TD) and finite-difference frequency-domain (FD-FD) methods that have been used to analyze and optimize the waveguide designs. BPM can not calculate wide angle optical traffic due to its intrinsic paraxial limitation. Both FD-TD, FD-FD handle wide-angle bi-directional traffic but both demand tremendous computational resources.. In this thesis, we develop a new. formulation called full eigen-mode expansion technique (FEMET) that considers only forward propagating but all wide-angle traffic.. It is a. simplified version of our existing bidirectional, coupled transverse-mode integral-equation (CTMIE) formulation. FEMET includes all forward propagating, high-order mode field but neglects reflection at the dielectric discontinuities.. Since FEMET uses no matrix equations, it is much. faster than CTMIE.. To verify the accuracy of FEMET we consider the. titled straight waveguide (TSR) as our test example.. TSR has an exact. solution in its natural coordinate system which allows us to study computational. characteristics. of. FEMET.. The. two. FEMET. computational control parameters are the total number of waveguide sections and the number of modes used in each section. control the speed and accuracy of FEMET. III. Together they.
(8) We use FEMET to analyze radiation and mode interference of both S-bend waveguides and two-corner bends. These results compare well with result computed by other methods.. IV.
(9) 目錄 第一章 1.1. 導論............................................................1. 簡介 ............................................................................1. 第二章. FEMET 理論分析傾斜式直線波導 .........5. 2.1. FEMET 理論基本觀念..............................................5. 2.2. 傾斜式直線波導座標系統轉換 ................................8. 2.3. FEMET 分析傾斜式直線波導..................................9. 2.4. 傾斜式直線波導數值模擬結果.............................. 11. 第三章. FEMET 理論分析 S 型彎曲波導 ...........34. 3.1. TE 入射 FEMET 理論架構與推導 .........................34. 3.2. S 型彎曲波導切區設計和數值模擬結果...............40. 第四章. FEMET 理論分析兩段式彎曲波導 .......59. 4.1. 兩段式彎曲波導數值模擬結果 ..............................59. 4.2. 彎曲波導能量分析..................................................69. 4.3. 彎曲波導的驗正......................................................75. 第五章. 結論與未來工作......................................83. 參考文獻. 84. 中英文對照表. 86. V.
(10) 圖表目錄 圖 1.1-1 S-bend 示意圖 ............................................................................ 4 圖 1.1-2 Two corner bend 示意圖 ............................................................. 4 圖 1.1-3 Tilted straight waveguide 示意圖 ............................................... 4 圖 2.1-1 Two corner bend 結構圖 ............................................................. 5 圖 2.1-2 Two corner bend 分區示意圖 ..................................................... 6 圖 2.1-3 tilted straight waveguide 示意圖 ................................................ 7 圖 2.2-1 座標系統轉換 ............................................................................. 8 圖 2.3-1 階梯近似示意圖 ......................................................................... 9 表 2.4-1 tilted straight waveguide 共同參數 .......................................... 11 圖 2.4-1 tilted straight waveguide 結構圖 .............................................. 12 圖 2.4-2 元件能量分佈圖 ....................................................................... 14 圖 2.4-3 元件場形分佈圖 ....................................................................... 14 圖 2.4-4 FEMET 輸入和輸出能量比較................................................ 15 圖 2.4-5 FEMET 和理論正解輸出場形的比較..................................... 15 圖 2.4-6 第一個模態轉換系數與 θ max 的關系........................................ 16 表 2.4-2 模態角度與分區對 MME 的影響 ........................................... 16 圖 2.4-7 元件能量分佈圖 ....................................................................... 17 圖 2.4-8 元件場形分佈圖 ....................................................................... 17. VI.
(11) 圖 2.4-9 FEMET 輸入和輸出能量比較................................................ 18 圖 2.4-10 FEMET 和理論正解輸出場形的比較................................... 18 圖 2.4-11 第一個模態轉換系數與 θ max 的關系 ...................................... 19 表 2.4-3 模態角度與分區對 MME 的影響 .......................................... 19 圖 2.4-12 元件能量分佈圖 ..................................................................... 20 圖 2.4-13 元件場形分佈圖 ..................................................................... 20 圖 2.4-14 FEMET 輸入和輸出能量比較.............................................. 21 圖 2.4-15 FEMET 和理論正解輸出場形的比較................................... 21 圖 2.4-16 第一個模態轉換系數與 θ max 的關系...................................... 22 表 2.4-4 模態角度與分區對 MME 的影響 .......................................... 22 圖 2.4-17 元件能量分佈圖. .............................................. 23. 圖 2.4-18 元件場形分佈圖 ..................................................................... 23 圖 2.4-19 FEMET 輸入和輸出能量比較.............................................. 24 圖 2.4-20 FEMET 和理論正解輸出場形的比較................................... 24 圖 2.4-21 第一個模態轉換系數與 θ max 的關系...................................... 25 表 2.4-5 模態角度與分區對 MME 的影響 .......................................... 25 圖 2.4-22 元件能量分佈圖 ..................................................................... 26 圖 2.4-23 元件場形分佈圖 ..................................................................... 26 圖 2.4-24 FEMET 輸入和輸出能量比較.............................................. 27. VII.
(12) 圖 2.4-25 FEMET 和理論正解輸出場形的比較................................... 27 圖 2.4-26 第一個模態轉換系數與 θ max 的關系...................................... 28 表 2.4-6 模態角度與分區對 MME 的影響 .......................................... 28 圖 2.4-27 元件能量分佈圖 ..................................................................... 29 圖 2.4-28 元件場形分佈圖 ..................................................................... 29 圖 2.4-29 FEMET 輸入和輸出能量比較.............................................. 30 圖 2.4-30 FEMET 和理論正解輸出場形的比較................................... 30 表 2.4-7~表 2.4-11 折射率為 1.5:1 其模態角度與分區對 MME 的 影響 .................................................................................................. 31~33 圖 3.1-1 S-bend 結構示意圖................................................................... 34 圖 3.1-2 S-bend 分區示意圖................................................................... 34 圖 3.1-3 階梯近似示意圖 ....................................................................... 35 圖 3.2-1 S-bend 結構圖........................................................................... 40 表 3.2-1 S-bend 定義的參數 .................................................................. 41 表 3.2-2 S-bend 共同參數....................................................................... 44 圖 3.2-2 元件能量分佈圖 ....................................................................... 46 圖 3.2-3 元件場形分佈圖 ....................................................................... 46 圖 3.2-4 輸入和輸出能量比較 ............................................................... 47 圖 3.2-5 最後一個模態轉換系數與 θ max 的關系.................................... 47. VIII.
(13) 表 3.2-3 穿透能量和偏移量 ................................................................... 47 圖 3.2-6 元件能量分佈圖 ....................................................................... 48 圖 3.2-7 元件場形分佈圖 ....................................................................... 48 圖 3.2-8 輸入和輸出能量比較 ............................................................... 49 圖 3.2-9 最後一個模態轉換系數與 θ max 的關系.................................... 49 表 3.2-4 穿透能量和偏移量 ................................................................... 49 圖 3.2-10 元件能量分佈圖 ..................................................................... 50 圖 3.2-11 元件場形分佈圖 ..................................................................... 50 圖 3.2-12 輸入和輸出能量比較 ............................................................. 51 圖 3.2-13 最後一個模態轉換系數與 θ max 的關系.................................. 51 表 3.2-5 穿透能量和偏移量 ................................................................... 51 圖 3.2-14 元件能量分佈圖 ..................................................................... 52 圖 3.2-15 元件場形分佈圖 ..................................................................... 52 圖 3.2-16 輸入和輸出能量比較 ............................................................. 53 圖 3.2-17 最後一個模態轉換系數與 θ max 的關系.................................. 53 表 3.2-6 穿透能量和偏移量 ................................................................... 53 圖 3.2-18 元件能量分佈圖 ..................................................................... 54 圖 3.2-19 元件場形分佈圖 ..................................................................... 54 圖 3.2-20 輸入和輸出能量比較 ............................................................. 55. IX.
(14) 圖 3.2-21 最後一個模態轉換系數與 θ max 的關系.................................. 55 表 3.2-7 穿透能量和偏移量 ................................................................... 55 圖 3.2-22 元件能量分佈圖 ..................................................................... 56 圖 3.2-23 元件場形分佈圖 ..................................................................... 56 圖 3.2-24 輸入和輸出能量比較 ............................................................. 57 圖 3.2-25 最後一個模態轉換系數與 θ max 的關系.................................. 57 表 3.2-8 穿透能量和偏移量 ................................................................... 57 表 3.2-9 25°~70°穿透能量和偏移量...................................................... 58 圖 3.2-26 穿透能量& θ ........................................................................... 58 表 4.1-1 Two corner bend 共同參數 ....................................................... 59 圖 4.1-1 Two corner bend 結構圖 ........................................................... 60 圖 4.1-2 元件能量分佈圖 ....................................................................... 62 圖 4.1-3 最後一個模態轉換系數與 θ max 的關系.................................... 62 表 4.1-2 穿透能量和偏移量 ................................................................... 62 圖 4.1-4 元件能量分佈圖 ....................................................................... 63 圖 4.1-5 最後一個模態轉換系數與 θ max 的關系.................................... 63 表 4.1-3 穿透能量和偏移量 ................................................................... 63 圖 4.1-6 元件能量分佈圖 ....................................................................... 64 圖 4.1-7 最後一個模態轉換系數與 θ max 的關系.................................... 64. X.
(15) 表 4.1-4 穿透能量和偏移量 ................................................................... 64 圖 4.1-8 元件能量分佈圖 ....................................................................... 65 圖 4.1-9 最後一個模態轉換系數與 θ max 的關系.................................... 65 表 4.1-5 穿透能量和偏移量 ................................................................... 65 圖 4.1-10 元件能量分佈圖 ..................................................................... 66 圖 4.1-11 最後一個模態轉換系數與 θ max 的關系.................................. 66 表 4.1-6 穿透能量和偏移量 ................................................................... 66 圖 4.1-12 元件能量分佈圖 ..................................................................... 67 圖 4.1-13 最後一個模態轉換系數與 θ max 的關系.................................. 67 表 4.1-7 穿透能量和偏移量 ................................................................... 67 表 4.1-8 S-bend 和 Two corner bend 穿透能量比較 ............................. 68 圖 4.1-14 S-bend 和 Two corner bend 比較圖 ..................................... 68 圖 4.2-1 single mode s 小對比 S-bend 元件能量分佈圖 ...................... 70 圖 4.2-2 single mode 大對比 S-bend 元件能量分佈圖 ........................ 70 表 4.2-1 S-bend 參數和模態數............................................................... 70 圖 4.2-3 single mode 小對比 S-bend 元件能量分佈圖 ........................ 71 圖 4.2-4 single mode 小對比 S-bend 元件能量分佈圖 ........................ 71 表 4.2-2 S-bend 參數和模態數............................................................... 71 圖 4.2-5 multi-modes 大對比 S-bend 元件能量分佈圖 ....................... 72. XI.
(16) 圖 4.2-6 multi-modes 大對比 S-bend 元件能量分佈圖 ....................... 72 表 4.2-3 S-bend 參數和模態數............................................................... 72 圖 4.2-7 single mode 小對比 Two corner bend 元件能量分佈圖 ......... 73 圖 4.2-8 single mode 小對比 Two corner bend 元件能量分佈圖 ......... 73 表 4.2-4 Two corner bend 參數和模態數............................................... 73 圖 4.2-9 multi-mode 大對比 Two corner bend 元件能量分佈圖 .......... 74 圖 4.2-10 multi-mode 大對比 Two corner bend 元件能量分佈圖 ........ 74 表 4.2-5 Two corner bend 參數和模態數............................................... 74 表 4.3-1 S-bend 參數.............................................................................. 75 表 4.3-2 S-bend 牆的位置對穿透能量及穿透系數的影響 .................. 75 表 4.3-3 S-bend 牆的位置對穿透能量及穿透系數的影響 .................. 76 表 4.3-4 S-bend 牆的位置對穿透能量及穿透系數的影響 .................. 76 表 4.3-5 S-bend 參數............................................................................... 77 表 4.3-6 S-bend 切的區域對穿透能量及穿透系數的影響 .................. 77 表 4.3-7 S-bend 切的區域對穿透能量及穿透系數的影響 .................. 78 表 4.3-8 S-bend 切的區域對穿透能量及穿透系數的影響 .................. 78 表 4.3-9 S-bend 參數............................................................................... 79 表 4.3-10 S-bend 所取的模態數對穿透能量及穿透系數的影響 ........ 79 表 4.3-11 S-bend 所取的模態數對穿透能量及穿透系數的影響......... 80. XII.
(17) 表 4.3-12 S-bend 所取的模態數對穿透能量及穿透系數的影響 ........ 80 圖 4.3-1 S-bend 牆對能量穿透的影響................................................... 81 圖 4.3-2 S-bend N λ 對能量穿透的影響.................................................. 81 圖 4.3-3 S-bend θ max 對能量穿透的影響 ................................................ 82. XIII.
(18) 第一章 導論 1. 1 簡介 一般我們直覺光以單模入射於彎曲波導傳播時,其特性會和 直線波導傳播一樣強度固定不會有大小的變化,但是事實上彎曲波導 在傳播時會有兩模或多模干涉的現象,尤其是在兩段式彎曲波導(two corner bend)如圖 1.1-2 所示,在彎曲時多模干涉現象會更加的顯著。 而近年來分析各種彎曲波導的方法有很多種,有光束傳播法 (beam propagation method, BPM) 、 時 域 有 限 差 分 法 (time-domain finite-difference, FD-TD) 、 頻 域 有 限 差 分 法 (frequency-domain finite-difference, FD-FD),而有別於光束傳播法雖然速度很快但是它 有角度的限制及高階模態計算不精準的缺點,沒辦法模擬長距離波 導,而時域有限差分法和頻域有限差分法為雙向傳播(bi-direction)使 用大量的計算,所以只能計算較小的結構。 分析彎曲波導的論文相當的廣泛,就以分析 S 型彎曲波導 (S-bend)如圖 1.1-1 所示來改善彎曲損耗方面就有很多種類型。而此篇 論文[1]就在探討設計最佳化的曲線公式來減少輻射損失的情形,而更 進一步減少彎曲損失的方法有很多篇論文提出,其中增加橫向偏移量 (lateral offset)就是其中之一,此篇論文[2]就是增加其彎曲波導的橫向 偏移量來改善彎曲時其能量的損失,而在[3]的論文中在探討匹配彎曲 1.
(19) 波導(matched bend)的方法來設計曲線波導,其中 S 型彎曲波導就是 由兩個匹配彎曲波導所組成,是一件很容易設計的方法,不過此方法 的缺點就是必須要慎選其彎曲半徑及彎曲角度。以上的論文都是在針 對 S 型彎曲波導在改善其彎曲損失的設計。 而在[4]論文中就是比較 S 型彎曲波導和兩段式彎曲波導在彎曲 時損失的比較,在此論文提到其輸出能量的公式不過所推導出的公式 是很近似並不精確,最後所得到的結論為兩個不在同一直線上的波導 要連接時較小的偏移量一般都使用兩段式彎曲波導來連接,較大的偏 移量都採用 S 型彎曲波導。 至於兩段式彎曲波導的論文大都是改善其轉彎時造成的損失 的一些設計方法,此論文[5]就是用 BPM 來模擬分析兩段式彎曲波 導,來改善轉彎時造成能量的損失其方法有去角的形式、耦合的方法 及在轉彎處放懸臂架不過這些方法都有它的缺點並不是很好的方 法。而用 BPM 來模擬兩段式彎曲波導必須還有以下的限制,其不考 慮反射且在波導中其兩折射率的差值必須要小。 而現今市面上分析傾斜式直線波導(tilted straight waveguide, TSW)有很多種方法如圖 1.1-3 所示,而 BPM 為其中的一種近似方法, BPM 分析大角度的方法又分為 FD-BPM、FFT-BPM[6]及 FE-BPM[7] 其中 FFT-BPM 和 FE-BPM 都是使用 Pade′ 近似方法來計算彎曲波導. 2.
(20) 在大角度的例子,不過這些方法其精確度都沒有很高。 本 實 驗 室 提 出 全 特 徵 模 態 展 開 法 (full eigen-mode expansion technique , FEMET[8])做為分析彎曲波導元件的模擬依據是一種不考 慮反射的近似方法,採用的理論是一種假設已知結構內外的基底型式 進行嚴謹的近似,利用矩陣方法求解入射、干涉及穿透各區的模態 β 值,且分析後即涵括所有的模態。FEMET 並非像耦合橫向模態積分 方程式 (couple transverse mode integral equation, CTMIE[9])方法,在 求解特徵值還需解聯立方程式,觀念上是屬於簡單易懂的理論,因此 在計算量上可節省許多數值的計算與時間。而在精確度上,雖然 FEMET 忽略了反射,故所求的解為近似解,但是其解與 CTMIE 考慮 反射後的正解比較後卻相當近似。而我們將介紹理論的基本觀念,分 析單模的 TE 極化光場入射到彎曲波導中,經由干涉區後所產生之結 果,利用模態轉換的方式,分析彎曲波導的場型、各個模態係數以及 出口端之穿透係數。 本論文內容是使用 FEMET 來分析大角度彎曲波導,包括 S 型 彎曲波導、兩段式彎曲波導及傾斜式直線波導,我們將分析模擬各種 彎曲波導的能量圖和場形圖分佈,以及最後的穿透能量和穿透系數的 大小,最後我們將比較 S 型彎曲波導和兩段式彎曲波導在相同的偏移 量其能量穿透的結果。. 3.
(21) 首先我們採用 FEMET 理論先去分析傾斜式直線波導,並與 正解比較其 FEMET 的準確性,我們可以發現其模態不匹配錯誤 ( Mode Mismatched error , MME)的值都在小數點四位以下,相當接近 正解。. 圖 1.1-1. S-bend 示意圖. 圖 1.1-3. 圖 1.1-2. Two corner bend 示意圖. Tilted straight waveguide 示意. 4.
(22) 第二章 FEMET 理論分析傾斜式直線波導 2. 1 FEMET 理論基本觀念 全特徵模態展開法是不考慮反射情況下所發展出來的近似理 論,本節先僅對兩段式彎曲波導的結構做基本觀念的介紹,如圖 2.1-1 所示第(I)區為入射區,第(II)區為干涉區,第(III)為穿透區,先定義出. TE 極化場型形式及模態基底,再使用模態轉換的觀念,即可知道每 一區中的每一點的場量形式,便可分析出彎曲波導的完整場形,這就 是 FEMET 理論的基本精神。. (I ). ( II ). ( III ). ( z1 ) 圖 2.1-1. ( zN ) Two corner bend 結構圖. 首先將干涉區分為 N 區如圖 2.1-2 在定義每一區的電場分佈的型 式 E (1) ( x, z ) 、 E (2) ( x, z ). E ( m ) ( x, z ) 5. E ( N +1) ( x, z ) ,在利用界面上相鄰.
(23) 兩區場量連續的觀念,將相鄰兩區寫為 E (1) ( x, z = z1 ) = E (2) ( x, z = z1 ). E ( m−1) ( x, z = zm−1 ) = E ( m ) ( x, z = zm−1 ). E ( N ) ( x, z = z N ) = E ( N +1) ( x, z = z N ) 便. →(2) 可分別推導出每一區到下一區的模態轉換系數 Ci(1) ,j. Ck( m,l −1)→( m ). C pN,q→ N +1 再 經 由 模 態 轉 換 係 數 便 可 以 知 道 E (1) ( x, z ) 、 E (2) ( x, z ) 、 E (3) ( x, z ). E ( N +1) 的完整形式,便可分析出兩段式彎曲波導的場形。. 本節已經概略描述兩段式彎曲波導之 FEMET 理論的基本觀念, 下一節將以 TE 極化入射,針對傾斜式直線波導曲波導做 FEMET 理 論架構詳盡的說明。. ( N + 1). ( m). (1). •• • • • • • •• •. ( z1 ) 圖 2.1-2. ( zm −1 ) ( zm ). ( zN ). Two corner bend 分區示意圖 6.
(24) 而我們一般模擬分析傾斜式直線波導如圖 4.1-1 所示有. BPM、FD-FD、FD-TD、CTMIE 等理論。但是使用 BPM 做模擬 分析,其方法為近似理論所以 BPM 才能單方向傳播且 BPM 不能模 擬大角度,它模擬大角度一開始就不正確。而使用 CTMIE 理論去 做分析其因 CTMIE 它為精確解考慮反射,所以當在干涉區做階梯 近似時,切的不夠細分區分的不夠多,其階梯近似所產生的反射 會造成誤差,而 FEMET 緊考慮單方向傳播,忽略階梯近似所產生 之反射,因此,此結構適合使用 FEMET 來分析。而我們為什麼選 擇傾斜式直線波導來做分析是因為 S 型彎曲波導、兩段式彎曲波 導並無正解可做比較,而傾斜式直線波導有正解,我們可與正解 比較其精確度。因此我們可以用此結構來比較 FEMET 忽略了反射 所求的解為近似解的正確性。. n1. n2. W. n1. L. 圖 2.1-3. tilted straight waveguide 示意圖. 7.
(25) 2.2 傾斜式直線波導座標系統轉換 由於在模擬分析傾斜式直線波導我們將使用到座標系統轉換的 觀念,因此本節我們將簡單介紹座標系統轉換的基本觀念如圖 2.2-1 所示,由圖可得知. ⎧ z′ = ( z − z0 )cosθ + ( x − x0 )sin θ ⎨ ⎩ x′ = −( z − z0 )sin θ + ( x − x0 )cosθ. (2.1-1). 其中 z0 = 0 我們將 2.1-1 式改寫為矩陣的形式. ⎡ z′ ⎤ ⎡ cosθ ⎢ ⎥=⎢ ⎣ x′⎦ ⎣ − sin θ. sin θ ⎤ ⎡ z ⎤ cosθ ⎦⎥ ⎣⎢ x − x0 ⎦⎥. z = 0 時其 z′ = ( x − x0 )sin θ. x′ = ( x − x0 )cosθ. z = L 時其 z′ = L cosθ + ( x − x0 )sin θ. (2.1-2). x′ = − L sin θ + ( x − x0 )cosθ (2.1-3). x. z′ x′. W. ( x0 , z0 ). •. •. θ. z. (0,0). 圖 2.2-1 座標系統轉換 8.
(26) 2.3 FEMET 分析傾斜式直線波導 FEMET 的理論分析波導結構在我們將在下一章節詳加說明,因 此本節我們不詳細討論,只針對階梯近似第一區座標轉換的不同加以 說明,如圖 2.3-1 為傾斜式直線波導的階梯近似示意圖. (0). (1). EW ( m). (2). ( M ) ( M + 1). u. uinc ( x′, z′). M. u M +1. um u. u II. I. z0. z1. EW. zm−1. zm. zM −1. zM. 圖 2.3-1 階梯近似示意圖. 第一區模態轉換系數 (cnI ) 的計算. uinc ( x′, z′) = φ1(0) ( x′)e − jβ1. (0). N. ( z′). (2.3-1). u ( x, z ) = ∑ cnI φnI ( x)e − jβn ( z − z0 ) I. I. n =1. 其中 uinc ( x′, z′) 為 ( x′, z′) 座標的入射區場形 而在當 z = 0 時我們可由座標轉換將 2.1-2 式代入將上式改為. uinc ( x′, z′) = φ1(0) (( x − x0 )cosθ )e − jβ1. (0). 9. (( x − x0 )sin θ ). (2.3-2).
(27) 又 z = z0 即 z = 0 時電場連續. uinc ( x′, z′) = u I ( x,0) N. uinc ( x′, z′) = ∑ CnIφnI ( x) n =1. 兩邊同乘 φnI ( x)∗ 可得. cnI = uinc ( x′, z′) φnI * ( x) cnI = φ1(0) (( x − x0 )cosθ )e − jβ1. (0). ( x − x0 )sin θ. (2.3-3). φnI * ( x). 第二區以後模態轉換系數的計算 N m ⎧ m u ( x , z ) = cnmφnm ( x)e− jβn ( z − zm −1 ) ∑ ⎪ ⎪ n =1 , m = 2, ⎨ N m +1 ⎪u m+1 ( x, z ) = c m+1φ m+1 ( x)e − jβk ( z − zm ) ∑ k k ⎪⎩ k =1. ,M +1. 當 z = zm 時電場連續. u m+1 ( x, zm ) = u m ( x, zm ) N. N. ∑ e− jβn Δ zm cnm ⋅ φnm ( x) = ∑ ckm+1φkm+1 ( x) m. n =1. k =1. 兩邊同乘 φkm+1 ( x)∗ m +1 k. c. N. = ∑ e − jβn Δ zm cnm ⋅ φnm ( x) φkm+1∗ m. n =1 H. ckm+1 = ∫ u m ( x, zm ) φkm+1* ( x)dx 0. N. = ∑e n =1. H. c ⋅ ∫ φ ( x)φ. − j β nm Δ zm m n. 0. m n. m +1* k. (2.3-4) ( x)dx. 其中 Δ zm = zm − zm−1. 10.
(28) 2.4 傾斜式直線波導數值模擬結果 我們最初採用 TE 極化場量形式單一模態入射,並且模擬分析各 個角度能量及場形的變化,最後我們將 FEMMT 最後一區的場形與正 解做比較來分析 FEMET 的精確性,其中 θ max 為基底模態最小值的角 度而傾斜式直線波導共同參數如表 2.4-1 所示. p. k0 n1. θ max = cos −1. θ max. β min k0 n1. β min 參數定義. 設定值 1.55μ m. 入射波長. Core 折射率. 3.3. Cladding 折射率. 3.17. 干涉區的長度. 4.65 8.8μ m. Core 的寬度 基底模態最小值的角度 θ max. 90°. 上牆至 Core 的距離. 15μ m. 下牆至 Core 的距離. 15μ m. 表 2.4-1. tilted straight waveguide 共同參數. 11.
(29) 由圖 2.4-1 所示 n、 1 n2 分別為 Core 和 Cladding 的折射率, θ 為 彎曲波導的夾角, L 為干涉區的長度, d sub、dsup 為牆至 Core 的距離, 而 Wcore 為 ( z′, x′) 座標 core 的寬度, d core 為 ( z , x) 座標 core 的寬度,兩 者的關系為 d core = Wcore / cosθ ,另外我們定義模態不匹配錯誤. ( Mode Mismatched error , MME) MME = 1 − ∫. Eexact ( x, z = L) EFEMET * ( x, z = L)dx. ∫. (2.4-1). 2. Eexact dx. 其中 Eexact ( x, L) 為座標轉換後之理想電場 Eexact ( x, L) = φ1(0) (( x − x0 )cosθ − L sin θ )e. 0 − j β1( ) [ L cos θ + ( x − x0 ) sin θ ]. (2.4-2). dsup. n2. x' z'. x dcore. z. θ. n1. wcore. n2. dsub L 圖 2.4-1. tilted straight waveguide 結構圖. 12.
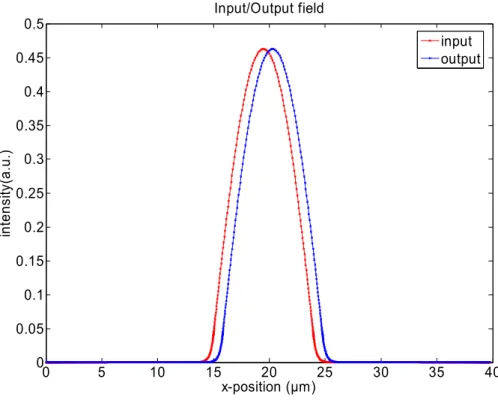
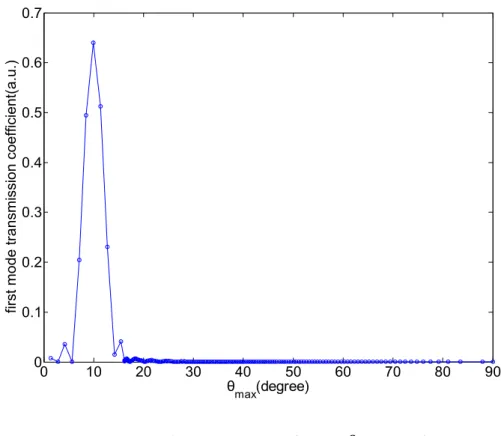
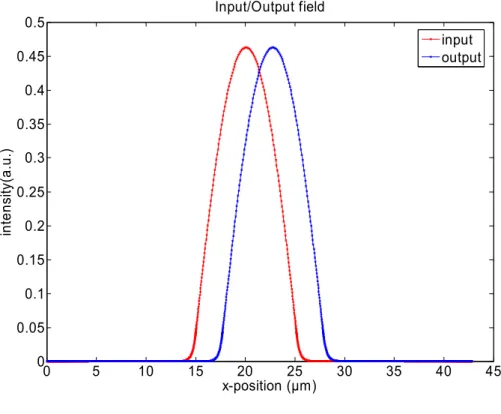
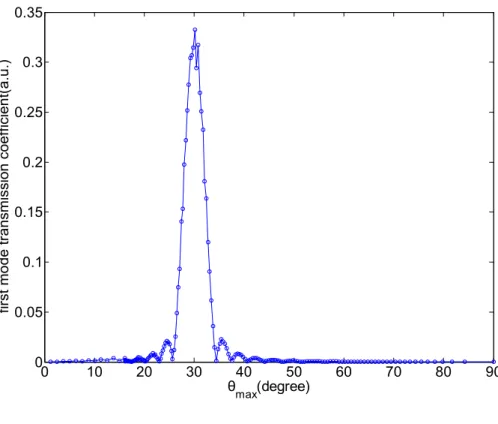
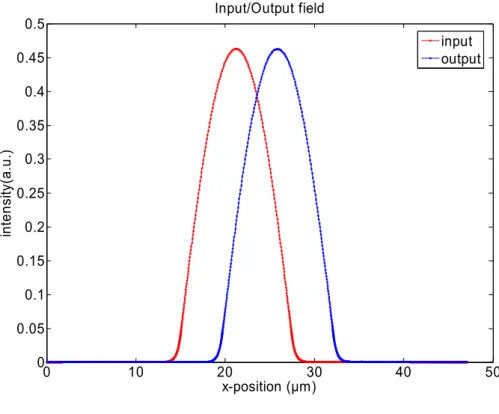
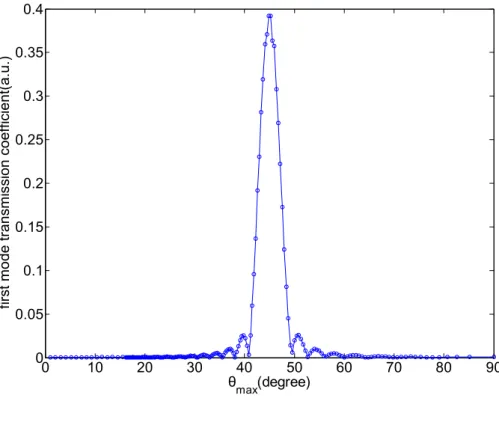
(30) 接著我們分別對 θ 為 10 度、20 度、30 度、45 度及 60 度做模 擬分析,其分析後繪製的能量圖和場形圖分別為圖 2.4-2、圖 2.4-3、 圖 2.4-7、圖 2.4-8、圖 2.4-12、圖 2.4-13、圖 2.4-17、圖 2.4-18 及圖. 2.4-22、圖 2.4-23。 我們比較 FEMET 最後一區的場形與理論正解做比較如圖. 2.4-5、圖 2.4-10、圖 2.4-15、圖 2.4-20 及圖 2.4-25,可以發現 FEMET 輸出的場形與理論正解的場形兩者的差距很小都在10−4 以下,其場形 圖機乎重疊在一起,由此見 FEMET 不考慮反射的近似解其精確度相 當高。而圖 2.4-6、圖 2.4-11、圖 2.4-16、圖 2.4-21 及圖 2.4-26 為第一 個模態轉換系數和基底模態最小值的角度關系,由圖可知當 θ max = 90° 時我們所取的模態到 β 虛部第一位,而隨著角度的減少所取的模態相 對的減少,由此圖我們可以了解當彎曲的角度多少,我們所須要的模 態個數為多少。 而表 2.4-2、表 2.4-3、表 2.4-4、表 2.4-5 及表 2.4-6 為模態基底 角度 θ max 和分區對 MME 的影響其中 N λ 為我們所定義分區的參數,. N λ 越大所切的區間越多,當 θ max 越大所取的模態越多相對的 FEMET 的值就越精準,因此當 θ max = 90° N λ 為 25 時所得到的 MME 就越小。 最後我們模擬 θ = 10° L = 100um 的能量圖和場形圖如圖. 2.4-27、圖 2.4-28、圖 2.4-29 及圖 2.4-30 所示。 13.
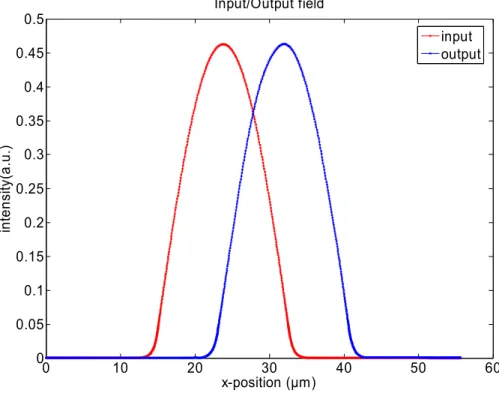
(31) (1) θ = 10° MME=6.6772e-007. 35. 0.4. 30. 0.35 0.3. 25. 0.25. 20. 0.2. 15. 0.15 10 0.1 5 0. 0.05 -20. -10. 0 10 z-position (μm). 圖 2.4-2. 20. 元件能量分佈圖. 35 30 x-position (μm). x-position (μm). 0.45. 25 20 15 10 5 0. -20. -10. 圖 2.4-3. 0 10 z-position (μm). 元件場形分佈圖 14. 20.
(32) Input/Output field. 0.5. input output. 0.45 0.4. intensity(a.u.). 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 0. 5. 10. 圖 2.4-4. 15. 20 25 x-position (μm). 30. 35. 40. FEMET 輸入和輸出能量比較. Exact/FEMET Output field. 0.5. FEMET Exact. 0.4 0.3 0.2 0.1 0 -0.1 -0.2 -0.3 -0.4 -0.5 0. 5. 圖 2.4-5. 10. 15. 20 25 x-position (μm). 30. 35. FEMET 和理論正解輸出場形的比較. 15. 40.
(33) first mode transmission coefficient(a.u.). 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0. 10. 20. 圖 2.4-6. Nλ. 30. 40 50 θmax(degree). 60. 70. 80. 90. 第一個模態轉換系數與 θ max 的關系. 5. 10. 20. 25. 90°. 2.2666e-006. 1.0060e-006. 7.2788e-007. 6.6772e-007. 80°. 2.3001e-006. 1.0443e-006. 7.5027e-007. 6.8595e-007. 70°. 1.8731e-006. 1.1302e-006. 7.9780e-007. 7.2466e-007. 60°. 2.1690e-006. 1.3348e-006. 9.1408e-007. 8.2063e-007. 45°. 3.6209e-006. 2.1987e-006. 1.4266e-006. 1.2536e-006. 30°. 1.2986e-005 8.4453e-006. 5.9824e-006. 5.4318e-006. θ max. 表 2.4-2. 模態角度與分區對 MME 的影響. 16.
(34) (2) θ = 20° MME=6.4096e-009 0.45 40 0.4 35 0.35 x-position (μm). 30 0.3 25 0.25 20 0.2 15 0.15 10 0.1 5 0.05 0. -20. -10. 0 10 z-position (μm). 圖 2.4-7. 20. 元件能量分佈圖. 40 35. x-position (μm). 30 25 20 15 10 5 0. -20. -15. -10. -5. 圖 2.4-8. 0 5 10 z-position (μm). 元件場形分佈圖. 17. 15. 20. 25.
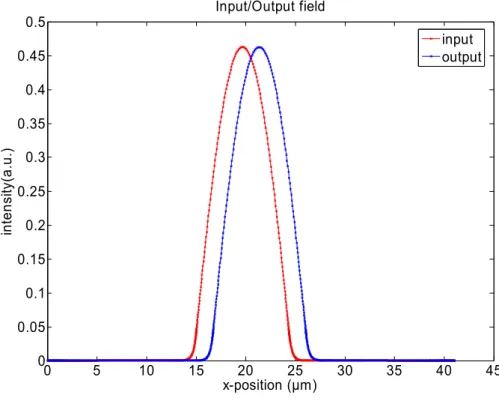
(35) Input/Output field. 0.5. input output. 0.45 0.4. intensity(a.u.). 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 0. 5. 10. 15. 圖 2.4-9. 20 25 x-position (μm). 30. 35. 40. 45. FEMET 輸入和輸出能量比較. Exact/FEMET Output field. 0.5. FEMET Exact. 0.4 0.3 0.2 0.1 0 -0.1 -0.2 -0.3 -0.4 -0.5 0. 5. 10. 圖 2.4-10. 15. 20 25 x-position (μm). 30. 35. 40. FEMET 和理論正解輸出場形的比較. 18. 45.
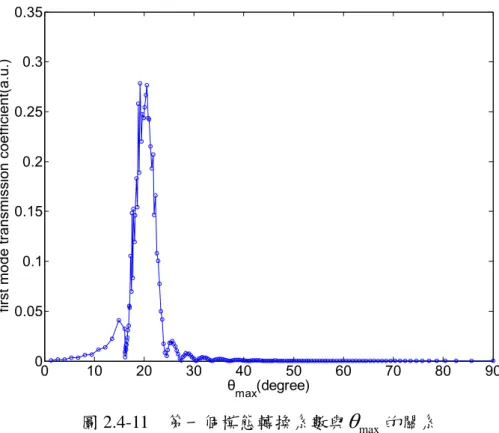
(36) first mode transmission coefficient(a.u.). 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 0. 10. 20. 30. 40 50 θmax(degree). 60. 70. 80. 90. 圖 2.4-11 第一個模態轉換系數與 θ max 的關系. Nλ. 5. 10. 20. 25. 90°. 3.8405e-006. 4.0977e-006. 2.1062e-006. 6.4096e-009. 80°. 3.9081e-006. 4.0600e-006. 2.0868e-006. 2.1932e-008. 70°. 4.2849e-006. 3.8295e-006. 1.9526e-006. 1.3543e-007. 60°. 5.3144e-006. 3.1977e-006. 1.5725e-006. 4.6202e-007. 45°. 1.1047e-005. 7.0848e-007. 1.2400e-006. 3.0442e-006. 30°. 1.3928e-004 1.1645e-004. 1.0978e-004. 1.1007e-004. θ max. 表 2.4-3. 模態角度與分區對 MME 的影響. 19.
(37) (3)θ = 30° MME=6.3901e-006 0.45 40. 0.4. 35. 0.35. x-position (μm). 30. 0.3. 25. 0.25. 20. 0.2. 15. 0.15. 10 0.1 5 0.05 0. -20. -10. 0 10 z-position (μm). 圖 2.4-12. 20. 30. 元件能量分佈圖. 40 35. x-position (μm). 30 25 20 15 10 5 0. -20. -10. 0 10 z-position (μm). 圖 2.4-13. 元件場形分佈圖 20. 20. 30.
(38) Input/Output field. 0.5. input output. 0.45 0.4. intensity(a.u.). 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 0. 5. 10. 15. 圖 2.4-14. 20 25 x-position (μm). 30. 35. 40. 45. FEMET 輸入和輸出能量比較. Exact/FEMET Output field. 0.5. FEMET Exact. 0.4 0.3 0.2 0.1 0 -0.1 -0.2 -0.3 -0.4 -0.5 0. 5. 10. 圖 2.4-15. 15. 20 25 x-position (μm). 30. 35. 40. FEMET 和理論正解輸出場形的比較. 21. 45.
(39) first mode transmission coefficient(a.u.). 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 0. 10. 20. 圖 2.4-16. Nλ. 30. 40 50 θmax(degree). 60. 70. 80. 90. 第一個模態轉換系數與 θ max 的關系. 5. 10. 20. 25. 90°. 9.1038e-006. 7.5978e-006. 6.6027e-006. 6.3901e-006. 80°. 9.4077e-006. 7.7908e-006. 6.7208e-006. 6.4923e-006. 70°. 1.0474e-005. 8.4728e-006. 7.1628e-006. 6.8840e-006. 60°. 1.2755e-005. 1.0034e-005. 8.2894e-006. 7.9198e-006. 45°. 5.2170e-005. 4.3715e-005. 3.8679e-005. 3.7629e-005. 40°. 1.4680e-004 1.3123e-004. 1.2186e-004. 1.1990e-004. θ max. 表 2.4-4. 模態角度與分區對 MME 的影響. 22.
(40) (4) θ = 45° MME=2.3261e-005 0.45 45. 0.4. 40 0.35. x-position (μm). 35. 0.3. 30 25. 0.25. 20. 0.2. 15. 0.15. 10. 0.1. 5 0. 0.05 -20. -10. 0 10 z-position (μm). 圖 2.4-17. 20. 30. 元件能量分佈圖. 45 40. x-position (μm). 35 30 25 20 15 10 5 0. -20. -10. 0 10 z-position (μm). 圖 2.4-18. 元件場形分佈圖. 23. 20. 30.
(41) Input/Output field. 0.5. input output. 0.45 0.4. intensity(a.u.). 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 0. 10. 20 30 x-position (μm). 圖 2.4-19. 40. 50. FEMET 輸入和輸出能量比較. Exact/FEMET Output field. 0.5. FEMET Exact. 0.4 0.3 0.2 0.1 0 -0.1 -0.2 -0.3 -0.4 -0.5 0. 10. 圖 2.4-20. 20 30 x-position (μm). 40. FEMET 和理論正解輸出場形的比較. 24. 50.
(42) first mode transmission coefficient(a.u.). 0.4 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 0. 10. 20. 圖 2.4-21. Nλ. 30. 40 50 θmax(degree). 60. 70. 80. 90. 第一個模態轉換系數與 θ max 的關系. 5. 10. 20. 25. 90°. 2.9240e-005. 2.6056e-005. 2.3763e-005. 2.3261e-005. 80°. 3.0820e-005. 2.7212e-005. 2.4626e-005. 2.4060e-005. 70°. 3.5855e-005. 3.1198e-005. 2.7920e-005. 2.7206e-005. 65°. 4.6348e-005. 4.0167e-005. 3.5877e-005. 3.4947e-005. 60°. 7.3302e-005. 6.4959e-005. 5.9197e-005. 5.7948e-005. 55°. 1.6944e-004 1.5482e-004. 1.4477e-004. 1.4259e-004. θ max. 表 2.4-5. 模態角度與分區對 MME 的影響. 25.
(43) (5) θ = 60°. MME=1.0159e-004. 0.45 0.4. 50. 0.35 x-position (μm). 40 0.3 0.25. 30. 0.2 20 0.15 10. 0.1 0.05. 0. -30. -20. -10. 0 10 z-position (μm). 圖 2.4-22. 20. 30. 元件能量分佈圖. 50. x-position (μm). 40. 30. 20. 10. 0. -30. -20. -10. 0 10 z-position (μm). 圖 2.4-23. 元件場形分佈圖. 26. 20. 30.
(44) Input/Output field. 0.5. input output. 0.45 0.4. intensity(a.u.). 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 0. 10. 20. 圖 2.4-24. 30 x-position (μm). 40. 50. 60. FEMET 輸入和輸出能量比較. Exact/FEMET Output field. 0.5. FEMET Exact. 0.4 0.3 0.2 0.1 0 -0.1 -0.2 -0.3 -0.4 -0.5 0. 10. 圖 2.4-25. 20. 30 x-position (μm). 40. 50. FEMET 和理論正解輸出場形的比較 27. 60.
(45) first mode transmission coefficient(a.u.). 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0. 10. 20. 圖 2.4-26. Nλ. 30. 40 50 θmax(degree). 60. 第一個模態轉換系數與. 70. 80. 90. θ max的關系. 5. 10. 20. 25. 90°. 1.1772e-004. 1.0919e-004. 1.0296e-004. 1.0159e-004. 85°. 1.1936e-004. 1.1062e-004. 1.0417e-004. 1.0417e-004. 80°. 1.3789e-004. 1.2724e-004. 1.1980e-004. 1.1980e-004. 75°. 1.6009e-004. 1.4748e-004. 1.3823e-004. 1.3823e-004. 70°. 4.7029e-004 4.4898e-004. 4.3295e-004. 4.3295e-004. θ max. 表 2.4-6. 模態角度與分區對 MME 的影響. 28.
(46) (6) θ =10°. L = 100um MME=1.0935e-005. x-position (μm). 0.45 60. 0.4. 50. 0.35. 40. 0.3. 30. 0.25 0.2. 20. 0.15. 10. 0.1. 0. 0.05 0. 20. 40 60 z-position (μm). 圖 2.4-27. 80. 100. 元件能量分佈圖. 60. x-position (μm). 50 40 30 20 10 0. 0. 20. 40 60 z-position (μm). 圖 2.4-28. 元件場形分佈圖 29. 80. 100.
(47) Input/Output field. 0.5. input output. 0.45 0.4. intensity(a.u.). 0.35 0.3 0.25 0.2 0.15 0.1 0.05 0 0. 10. 20. 圖 2.4-29. 30 x-position (μm). 40. 50. 60. FEMET 輸入和輸出能量比較 Exact/FEMET Output field. 0.5. FEMET Exact. 0.4 0.3 0.2 0.1 0 -0.1 -0.2 -0.3 -0.4 -0.5 0. 10. 圖 2.4-30. 20. 30 x-position (μm). 40. 50. FEMET 和理論正解輸出場形的比較 30. 60.
(48) 表 2.4-7~2.4-11 為相同參數,index 為 1.5:1 的模態角度與分 區對 MME 的影響我們可以看到其 θmax 及 N λ 越大所求的值越精確, 其誤差大都在10−3 左右。. (1)10 度. θ max. Nλ. 5. 10. 20. 25. 80°. 7.7609e-005 2.9633e-005. 1.7724e-005. 1.5324e-005. 70°. 7.3321e-005. 3.1146e-005. 1.8779e-005. 1.6243e-005. 60°. 7.7961e-005. 4.2365e-005. 2.5238e-005. 2.1680e-005. 45°. 1.2749e-004. 8.1785e-005. 5.0301e-005. 4.3380e-005. 30°. 3.6588e-004 3.6771e-004. 2.5397e-004. 2.2939e-004. 表 2.4-7. 模態角度與分區對 MME 的影響. (2)20 度 Nλ. 5. 10. 20. 25. 80°. 1.0749e-004. 7.3473e-005. 5.0940e-005. 4.5958e-005. 70°. 1.2392e-004 8.5282e-005. 5.8968e-005. 5.3115e-005. 60°. 1.9117e-004. 1.3096e-004. 8.9523e-005. 8.0342e-005. 50°. 3.6479e-004. 2.5257e-004. 1.7824e-004. 1.6190e-004. 45°. 4.2599e-004 3.1452e-004. 2.3584e-004. 2.1824e-004. θ max. 表 2.4-8. 模態角度與分區對 MME 的影響. 31.
(49) (3)30 度 Nλ. 5. 10. 20. 25. 80°. 2.2307e-004. 1.6425e-004. 1.2298e-004. 1.1396e-004. 70°. 2.8415e-004 1.9886e-004. 1.4563e-004. 1.3431e-004. 65°. 3.1552e-004. 2.2632e-004. 1.6366e-004. 1.5002e-004. 60°. 4.4101e-004. 3.1926e-004. 2.4043e-004. 2.2350e-004. 55°. 5.8403e-004 4.2543e-004. 3.2386e-004. 3.0213e-004. θ max. 表 2.4-9. 模態角度與分區對 MME 的影響. (4)45 度 Nλ. 5. 10. 20. 25. 85°. 6.7530e-004. 5.4379e-004. 4.4707e-004. 4.2552e-004. 80°. 6.7067e-004. 5.3747e-004. 4.4251e-004. 4.2144e-004. 75°. 7.0077e-004. 5.5669e-004. 4.5414e-004. 4.3141e-004. 70°. 1.0709e-003. 8.5425e-004. 6.9377e-004. 6.5798e-004. 65°. 1.2888e-003 1.0700e-003. 9.0161e-004. 8.6369e-004. θ max. 表 2.4-10. 模態角度與分區對 MME 的影響. 32.
(50) (5)60 度 Nλ. 5. 10. 20. 25. 90°. 2.4825e-003. 2.1343e-003. 1.8770e-003. 1.8203e-003. 85°. 2.6544e-003. 2.3096e-003. 2.0242e-003. 1.9597e-003. 80°. 3.8848e-003. 3.4525e-003. 3.0745e-003. 2.9874e-003. 75°. 5.7274e-003. 5.2027e-003. 4.8206e-003. 4.7354e-003. 70°. 6.9055e-003 5.7499e-003. 4.9319e-003. 4.7539e-003. θ max. 表 2.4-11 模態角度與分區對 MME 的影響. 33.
(51) 第三章 FEMET 理論分析 S 型彎曲波導 3.1TE 入射 FEMET 理論架構與推導 ( II ). (I ). ( III ). n1. n2. n1. z1 z2 圖 3.1-1. zN. S-bend 結構示意圖. (N+1). ( m). (1). z1 圖 3.1-2. zm −1 zm. zN. S-bend 分區示意圖. 34.
(52) 上一章我用 FEMET 驗正傾斜式直線波導與正解比較的準確 性,接下來我們將用 FEMET 理論來分析 S 型彎曲波導,首先我們將. S 型彎曲波導分為三區如圖 3.1-1 第(I)區為入射區,第(II)區為干涉 區,第(III)為穿透區,再者我們將 S 型彎曲波導的干涉區,利用切割 分區的方法做階梯近似,如圖 3.1-2 所示。由圖可以看出每個區域都 是三層結構所形成。 EW (1). (2). z1. (3). z2. 1) ( M − 1) ( M ) ( M +. ( m). z3. zm−1. zm. zM −1. zM. EW 圖 3.1-3. 階梯近似示意圖. 我們將 S 型彎曲波導上下邊界擺上 electric wall(EW[10])、electric. wall(EW)的觀念,接著分別定義第1 ~ M + 1 區的 TE 極化場量形式, 如圖 3.1-3 所示。. 35.
(53) 第 1 區(入射區):假設最初為單一模態入射, u (1) ( x, z ) = φ1(1) ( x)e − jβ1 z , (1). z ≤ z1. (3.1-1). 第 m 區(干涉區):形成干涉多模態形式, N. u. (m). ( x, z ) = ∑ c (jm )φ (j m ) ( x)e. − j β (j m ) ( z − zm −1 ). ,. (3.1-2). j =1. m = 2, ⋅⋅ ⋅, M , zm−1 < z < zm. 第 M+1 區(穿透區):能量穿透形式, N. u ( M +1) ( x, z ) = ∑ ti φi( M +1) ( x)e − jβi. ( M +1). i =1. ( z − zM ). , z ≥ zM. (3.1-3). ti = C (j M +1). FEMET 理論在界面上場量連續的討論方面,若 TE 極化入射界 面電場連續,TM 極化入射則考慮界面磁場連續,而本節討論以 TE 極化入射分析,因此我們在界面上僅做電場連續, 第 1 界面: u (1) ( x, z1 ) = u (2) ( x, z1 ) ⎧u (1) ( x, z1 ) = φ1(1) ( x)e − jβ1 z1 N ⎪ − j β1(1) z1 (1) (2) N ⇒ φ1 ( x )e = ∑ c (2) ⎨ (2) j φ j ( x) (2) (2) j =1 ⎪u ( x, z1 ) = ∑ c j φ j ( x ) = j 1 ⎩ (1). (3.1-4). ∗ 在兩邊同乘第二區的共軛基底函數 φ (2) j ( x). φ ( x ) φ ( x ) ( x )e (1) 1. (2) j. ∗. − j β1(1) z1. N. (2) ∗ = ∑ c (2) φ (2) j j ( x) φ j ( x) j =1. 我們利用了正交函數的內積特性. 36. (3.1-5).
(54) ⎧1 for j = i ⎩0 for j ≠ i. H. (2) ∗ (2) ∗ φ (2) = ∫ φ (2) j ( x ) φi ( x ) j ( x )φi ( x ) dx = ⎨ 0. (3.1-6). (3.1-5)式可以改寫成為 H. C. (2) j. ∗ − j β1 z = ∫ φ1(1) ( x)φ (2) dx , j ( x) e (1). 0. H. C. (2) j. ∗ − j β1 z = ∫ u (1) ( x, z1 )φ (2) dx j ( x) e (1). (3.1-7). 0. (2) 再將模態轉換系數(mode transition coefficient) C (2) ( x, z ) 則可 jm 代回 u. 求出第二區的場形。 同理我們可以在其它的界面上做電場連續,將各區之間的模態轉 換系數求得 第 m 界面: N ⎧ (m) − j β (j m ) ( z − zm −1 ) (m) (m) u ( x , z ) C φ ( x ) e = ∑ j j ⎪ ⎪ j =1 ⎨ N ⎪u ( m+1) ( x, z ) = C ( m+1)φ ( m+1) ( x)e − jβ k( m +1) ( z − zm ) ∑ k k ⎪⎩ H =1 ⇒ u ( m ) ( x, z m ) = u ( m+1) ( x, z m ) N ⎧ (m) − j β (j m ) ( zm − zm −1 ) (m) (m) = u ( x , z ) C φ ( x ) e ∑ m j j ⎪ ⎪ j =1 ⎨ N ⎪u ( m+1) ( x, z ) = C ( m+1)φ ( m+1) ( x ) ∑ m k k ⎪⎩ k =1 N. ⇒ ∑ C (j m )φ (j m ) ( x)e j =1. − j β (j m ) ( zm − zm −1 ). N. = ∑ Ck( m+1)φk( m+1) ( x) k =1. 兩邊同乘於 φk( m+1) ( x)∗ 37.
(55) N. ∑ C (j m) φ j( m) ( x) φk( m+1) ( x)∗ e. − j β (j m ) ( zm − zm−1 ). j =1. ( m +1) k. c. ( m +1) k. c. H N. = ∫ ∑ C (j m )φ (j m ) ( x)e. N. = ∑ Ck( m +1) φk( m +1) ( x) φk( m +1) ( x)∗ k =1. − j β (j m ) ( zm − zm −1 ). φkm+1( x)∗ dx. 0 j =1. H. = ∫ u ( m ) ( x, zm ) φkm+1( x)∗ dx. (3.1-8). 0. 第 M 界面: N ⎧ (M ) − j β p( M ) ( z − zM −1 ) (M ) (M ) = u ( x , z ) C φ ( x ) e ∑ p p ⎪ ⎪ p =1 ⎨ N ⎪u ( M +1) ( x, z ) = t ( M +1)φ ( M +1) ( x)e − jβi( M +1) ( z − zM ) ∑ i i ⎪⎩ i =1 ⇒ u ( M ) ( x, z M ) = u ( M +1) ( x, z M ) N ⎧ (M ) − j β p( M ) ( zM − zM −1 ) (M ) (M ) = u ( x , z ) C φ ( x ) e ∑ M p p ⎪ ⎪ p =1 ⎨ N ⎪u ( M +1) ( x, z ) = t ( M +1)φ ( M +1) ∑ M i i ⎪⎩ i =1 N. ⇒ ∑C p =1. φ. (M ) (M ) p p. ( x )e. − j β p( M ) ( zM − zM −1 ). N. = ∑ ti( M +1)φi( M +1) i =1. 兩邊同乘於 φi( M +1)∗ N. ∑ C p( M ) φ p( M ) ( x) φi( M +1) ( x)∗ e. − j β p( M ) ( zM − zM −1 ). p =1. t. t. ( M +1) i. ( M +1) i. H N. = ∫ ∑ C p( M )φ p( M ) ( x)e. N. = ∑ ti( M +1) φi( M +1) ( x) φi( M +1) ( x)∗ i =1. − j β p( M ) ( zM − zM −1 ). φi( M +1) ( x)∗ dx. 0 p =1. H. = ∫ u ( M ) ( x, zM ) φi( M +1) ( x) ∗dx 0. 38. (3.1-9).
(56) 以上結果皆假設 {φ1(1) ( x)} , {φ (j m ) ( x)} 與 {φi( M +1) ( x)} 為正交且規化 函數(orthonormal basis functions)為了解釋能量傳播現象,我們將精確 建 立 每 個 區 域 所 有 的 導 波 模 態 (guiding modes) 與 離 散 輻 射 模 態. (discretized radiation modes)的場型解,另外值得注意的是計算展開係 數(expansion coefficients) c (jmm ) 以及穿透係數(transmission coefficients) ti 時,其計算量與 N ⋅ H ⋅ M 成正比,其中 N 為每區全部模態的個數、 H 為波導高度(兩完美電牆之間距)。 對於 S 型彎曲波導分析,我們也可以使用 CTMIE 來解釋此構造 內之反射與透射情形。然而,此方法浮點運算量與 N 3 × M 成正比, 另外,切割更細更薄的 S 型彎曲波導梯形近似可減少因梯形近似所產 生之反射情形。. 39.
(57) 3.2 S 型彎曲波導切區設計和數值模擬結果. (II ). (I ) n1 Wh. RH. (III ). (zb , xb ). n2. y2,L R. y1,L. •. θ. •. • (z3, x3). θ. W. • (z2, x2 ). y1,R. (z1, x1). • (za , xa ) y2,R. n1. WU. RL (0,0). Wc WL. •. L1. Lt = 2RL 圖 3.2-1. L3. S-bend 結構圖. 由於 S 型彎曲波導其干涉區階梯近似分區定義與一般的傾斜 式直線波導和兩段式彎曲波導並不相同,S 型彎曲波導切區的分法要 特別去定義,切區的大小 Δx 隨著 cosθ 而變,即角度越大所切的區域 就越多,角度越小我們階梯近似所切的區域就不用那麼多,而各個參 數定義如下:. 40.
(58) 輸入的獨立參數. Wc. 波核寛度. WL. 下半部波覆的寛度. WU. 上半部波覆的寛度. R. 波核中心半徑. θ. 彎曲角度 (總彎曲角度= 2 θ ) 相關變數. RH. 半徑 R 的垂直分量. RL. 半徑 R 的水平分量. W. 平板波導總高 (波核至波核的距離). Wh. 平板波導半高. (zi, xi) XD. 彎曲座標中心和轉折點. S 型彎曲波導的側向位移 表 3.2-1. s-bend 定義的參數. RH = R cosθ , RL = R sin θ , Lt = 2 RL Wh = Wc 2 + R − RH , W = 2Wh z1 = 0,. x1 = WL + Wh − RH ,. z2 = z1 + RL ,. x2 = x1 + RH. z3 = z1 + 2 RL ,. x3 = x1 + 2 RH. S 型彎曲波導的側向位移定義為 X D = 2 R (1 − cos θ ) RH = R cosθ , RL = R sin θ , Lt = 2 R sin θ R1 = R − Wc 2, R2 = R + Wc 2. (3.2-1). (3.2-2). 為了定義上下兩條 S 型曲線我們必需先定義範圍的兩點值 ( Za ,X a ) 和. ( Zb ,X b ) 其值如 3.2-3 所示 Z a = z1 + R1 sin θ B ,. X a = x1 + R1 cosθ B. Z b = z3 − R1 sin θ B ,. X b = x3 − R1 cosθ B. 41. (3.2-3).
(59) ⎧ z + R sin θ n , 0 < θ n < θ B Zs = ⎨ 1 ⎩ z3 − R sin θ n , θ B > θ n > 0 ⎧ x + R 2 − ( z − z )2 , 0 < z < Z a 1 1 ⎪ 1 yL ( z ) = ⎨ ⎪ x3 − R22 − ( z − z3 )2 , Z a < z < z3 ⎩ ⎧ x + R 2 − ( z − z )2 , 0 < z < Z b 2 1 ⎪ 1 yU ( z ) = ⎨ ⎪ x3 − R12 − ( z − z3 )2 , Z b < z < z3 ⎩. (3.2-4). (3.2-5). 由圖 3.2-1 我們可以發現下面波核和波覆的介面是由 yL ( z ) 曲線 所決定,而上面波核和波覆的介面則是由 yU ( z ) 所定義而成,我們從. 3.2-4 式和 3.2-5 式就可求得。 在切區部份方面,我們希望定義一個通式來決定 S 型彎曲波導其 階梯近似的寬度為謀個定值,並且隨著波導的斜率變大其值變小即所 切的區域變多。因此我們選擇用波核中心線來定義有效的彎曲角度, 我們將中心曲線定義為 3.2-6 式,其中曲線 z 軸的值為 3.2-7 所示,最 後我們希望定義通式為 3.2-8 所示. ⎧ x + R cosθ , θ = 0 → θ B yc ( z ) = ⎨ 1 , θ θ θ − = → x R cos , 0 B ⎩ 3. (3.2-6). ⎧ z + R sin θ , θ = 0 → θ B z=⎨ 1 ⎩ z3 − R sin θ , θ = θ B → 0. (3.2-7). Δ yc ( z ) =. λ0 Nλ. ⋅ cosθ. (3.2-8). Δ yc ( z ) = R sin θ ⋅ Δθ. (3.2-9) 42.
(60) R sin θ ⋅ Δθ =. λ0 Nλ. cosθ , ⇒ R tan θ ⋅ Δθ =. tan θ n ⋅ (θ n − θ n−1 ) =. ⎛. (3.2-10). R ⋅ Nλ. ⎛ nλ0 ⎝ RN λ. ⎝. Nλ. λ0. ∫ tan θ dθ = log ( secθ ) , ⇒ log ( secθ n ) ≈ θ n = sec−1 ⎜⎜ exp ⎜. λ0. nλ0 R ⋅ Nλ. ⎞⎞ ⎟ ⎟⎟ ⎠⎠. (3.2-11). LHS = log ( secθ n ) − log ( secθ n−1 ) ≈ tan θ n ⋅ (θ n − θ n−1 ) RHS=. ( n − 1) λ0 = λ0 nλ0 − R ⋅ Nλ R ⋅ Nλ R ⋅ Nλ ⎛. λ0 Δyc (θ n ) = cosθ n R ⋅ Nλ. ⎛ N B λ0 ⎞ ⎞ Nλ log ( secθ B ) ⎟ ⎟⎟ ⇒ N B = R λ0 ⎝ RN λ ⎠ ⎠. θ B = sec−1 ⎜⎜ exp ⎜ ⎝. ⇒. (3.2-12). 我們經由 3.2-8 式和 3.2-9 式的整理可推得 3.2-10 式,其中 3.2-9 我們可以由 3.2-6 式求得,為了求得 3.2-10 式 θ n 值我們對 tan θ 積分其 近似的結果為 3.2-11 所示,在經由最後的整理我們可以求得我們所要 的 N B 和 θ B 值如 3.2-12 式所示,其中 N λ 為我們所選擇的參數, N B 的 值會隨著所選取的 N λ 改變,因此我們可從此式來決定我們所要切的 區間。. 43.
(61) 對於 S 型彎曲波導我們假設最初為單一模態入射,並且做各個圓 弧角度來做模擬分析,我們將可以看到各個不同的圓弧角度彎曲區域 所造成干涉情形,以及隨著圓弧角度越大其輸入和輸出的偏移量. (offsets)的距離就越遠所造成的能量穿透的情況,由於 FEMET 並不考 慮反射所以我們將針對穿透係數的部份來做討論,並模擬能量圖和場 形圖。. S 型彎曲波導共同參數如下表所示 S 型彎曲波導參數定義. 設定值. 1.55μ m. 入射波長. Core 折射率. 1.5. Cladding 折射率. 1. 入射區的長度. 5μ m. 穿透區的長度. 5μ m 2.325μ m. Core 的寬度 S-bend 圓弧半徑. 25μ m. 上牆至 Core 的距離. 25μ m. 下牆至 Core 的距離. 25μ m 表 3.2-2. s-bend 共同參數. 44.
(62) 我們分別對 θ 為 20 度、30 度、40 度、50 度、60 度及 70 度做 模擬分析,其能量圖和場形圖分別在圖 3.2-2 及圖 3.2-3、圖 3.2-6 及 圖 3.2-7、圖 3.2-10 及圖 3.2-11、圖 3.2-14 及圖 3.2-15、圖 3.2-18 及 圖 3.2-19、圖 3.2-22 及圖 3.2-23,我們由圖可以看出隨著 θ 越大其輸 入和輸出的偏移量相對的增加,輸出能量穿透率就漸漸的減少。 圖 3.2-4、圖 3.2-8、圖 3.2-12、圖 3.2-16、圖 3.2-20 及圖 3.2-24 為輸入和輸出的能量比較情形,而圖 3.2-5、圖 3.2-9、圖 3.2-13、圖. 3.2-17、圖 3.2-21 及圖 3.2-25 為最後一個模態轉換系和 θ max 的關系圖, 當 θ max 減少時所要的模態將相對的減少,表 3.2-2~3.2-7 分別代表各個 角度的穿透能量、第一個模態能量、偏移量、導波模態及所取的模態 個數。 表 3.2-8 及圖 3.2-26 為 25 度到 70 度 θ 和穿透能量收斂之間的關 系,當 25 度時其穿透能量為 0.984,但隨著角度變大偏移的距離就越 遠所以當 θ 為 70 度時偏移量到達 32.8 μ m 但其穿透能量降低到 0.958 左右。. 45.
(63) (1) θ =20° N λ = 120 1.1 1. 100. 0.9 0.8. x-position (μ m). 90. 0.7 80. 0.6 0.5. 70. 0.4 0.3. 60. 50. 0.2 0.1 -20. -10. 0 10 20 z-position (μ m). 圖 3.2-2. 30. 40. 元件能量分佈圖. 100. x-position (μ m). 90. 80. 70. 60. 50. -20. -10. 0. 圖 3.2-3. 10 z-position (μ m). 20. 元件場形分佈圖. 46. 30. 40.
(64) 0.9 input output. 0.8 0.7. intensity(a.u.). 0.6 0.5 0.4 0.3 0.2 0.1 0 50. 60. 70. final mode transmission coefficient. 圖 3.2-4 10. 0. 10. -1. 10. -2. 10. -3. 10. 20. 30. 80 x-position (μ m). 90. 100. 110. 輸入和輸出能量比較. 40 50 60 θmax (in degrees). 70. 80. 90. 最後一個模態轉換系數與 θ max 的關系. 圖 3.2-5. Transmitted First Power Offset ( μ m) Input/output Total FEMET Power ratio ratio Guiding modes modes 0.974. 0.02 表 3.2-3. 3.0. 4. 穿透能量和偏移量. 47. 70.
(65) (2) θ =30° N λ = 160. 1.1 1. x-position (μ m). 100. 0.9 0.8. 90. 0.7 0.6. 80. 0.5 70. 0.4 0.3. 60 50. 0.2 0.1 -20. -10. 0. 10 20 z-position (μ m). 圖 3.2-6. 30. 40. 50. 元件能量分佈圖. 100. x-position (μ m). 90. 80. 70. 60. 50. -20. -10. 0. 圖 3.2-7. 10 20 z-position (μ m). 30. 元件場形分佈圖. 48. 40. 50.
(66) 0.9 input output. 0.8 0.7. intensity(a.u.). 0.6 0.5 0.4 0.3 0.2 0.1 0 50. 60. 70. final mode transmission coefficient. 圖 3.2-8 10. 0. 10. -1. 10. -2. 10. -3. 10. 20. 圖 3.2-9. 30. 80 x-position (μ m). 90. 100. 110. 輸入和輸出能量比較. 40 50 60 θmax (in degrees). 70. 80. 90. 最後一個模態轉換系數與 θ max 的關系. Transmitted First Power Offset ( μ m) Input/output Total FEMET Power ratio ratio Guiding modes modes 0.988. 0.769. 表 3.2-4. 6.7. 4. 穿透能量和偏移量 49. 70.
(67) (3) θ =40° N λ = 160. 1. 110. 0.9. x-position (μ m). 100. 0.8 0.7. 90. 0.6 80. 0.5 0.4. 70. 0.3 60 50. 0.2 0.1 -20. -10. 0. 10 20 30 z-position (μ m). 40. 50. 圖 3.2-10 元件能量分佈圖. 110. x-position (μ m). 100. 90. 80. 70. 60. 50. -20. -10. 0. 10 20 z-position (μ m). 30. 圖 3.2-11 元件場形分佈圖. 50. 40. 50.
(68) 0.9 input output. 0.8 0.7. intensity(a.u.). 0.6 0.5 0.4 0.3 0.2 0.1 0 50. 60. 70. 80 90 x-position (μ m). 100. 110. 120. 80. 90. final mode transmission coefficient. 圖 3.2-12 輸入和輸出能量比較 10. 0. 10. -1. 10. -2. 10. -3. 10. 20. 30. 40 50 60 θmax (in degrees). 70. 圖 3.2-13 最後一個模態轉換系數與 θ max 的關系. Transmitted First Power Offset ( μ m) Input/output Total FEMET Power ratio ratio Guiding modes modes 0.984. 0.831. 11.7. 表 3.2-5 穿透能量和偏移量. 51. 4. 71.
(69) (4) θ =50° N λ = 200. 120. 1. 110. 0.9 0.8. x-position (μ m). 100. 0.7. 90. 0.6 0.5. 80. 0.4 70. 0.3 0.2. 60 50. 0.1 -20. -10. 0. 10 20 30 z-position (μ m). 40. 50. 60. 圖 3.2-14 元件能量分佈圖. 120 110. x-position (μ m). 100 90 80 70 60 50. -20. -10. 0. 10 20 30 z-position (μ m). 40. 圖 3.2-15 元件場形分佈圖. 52. 50. 60.
(70) 1 input output. 0.9 0.8. intensity(a.u.). 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 50. 60. 70. 80 90 100 x-position (μ m). 110. 120. 130. 80. 90. final mode transmission coefficient. 圖 3.2-16 輸入和輸出能量比較 10. 0. 10. -1. 10. -2. 10. -3. 10. -4. 10. 20. 30. 40 50 60 θmax (in degrees). 70. 最後一個模態換系數與 θ max 的關系. 圖 3.2-17. Transmitted First Power Offset ( μ m) Input/output Total FEMET Power ratio ratio Guiding modes modes 0.972. 0.826. 表 3.2-6. 17.8. 4. 穿透能量和偏移量 53. 72.
(71) (6) θ =60° N λ = 200 1.1 1. 120. 0.9. x-position (μ m). 110. 0.8. 100. 0.7. 90. 0.6 0.5. 80. 0.4. 70. 0.3. 60. 0.2. 50. 0.1 -20. 0. 20 z-position (μ m). 40. 60. 圖 3.2-18 元件能量分佈圖. 120. x-position (μ m). 110 100 90 80 70 60 50. -20. -10. 0. 10 20 30 z-position (μ m). 40. 圖 3.2-19 元件場形分佈圖. 54. 50. 60. 70.
(72) 1.4 input output. 1.2. intensity(a.u.). 1 0.8 0.6 0.4 0.2 0 50. 60. 70. 80 90 100 x-position (μ m). 110. 120. 130. 80. 90. final mode transmission coefficient. 圖 3.2-20 輸入和輸出能量比較 10. 0. 10. -1. 10. -2. 10. -3. 10. -4. 10. 20. 30. 40 50 60 θmax (in degrees). 70. 圖 3.2-21 最後一個模態轉換系數與 θ max 的關系. Transmitted First Power Offset ( μ m) Input/output Total FEMET Power ratio ratio Guiding modes modes 0.963. 0.577. 表 3.2-7. 25.0. 4. 穿透能量和偏移量 55. 73.
(73) (6) θ =70° N λ = 220. 1. 120. 0.9. x-position (μ m). 110. 0.8. 100. 0.7 0.6. 90. 0.5 80. 0.4. 70. 0.3. 60. 0.2. 50. 0.1 -20. 0. 20 40 z-position (μ m). 60. 圖 3.2-22 元件能量分佈圖. 120 110. x-position (μ m). 100 90 80 70 60 50. -20. -10. 0. 10. 20 30 z-position (μ m). 40. 圖 3.2-23 元件場形分佈圖. 56. 50. 60. 70.
(74) 0.9 input output. 0.8 0.7. intensity(a.u.). 0.6 0.5 0.4 0.3 0.2 0.1 0 50. 60. 70. 80 90 100 x-position (μ m). 110. 120. 130. 80. 90. final mode transmission coefficient. 圖 3.2-24 輸入和輸出能量比較 10. 0. 10. -1. 10. -2. 10. -3. 10. 20. 30. 40 50 60 θmax (in degrees). 70. 最後一個模態轉換系數與 θ max 的關系. 圖 3.2-25. Transmitted First Power Offset ( μ m) Input/output Total FEMET Power ratio ratio Guiding modes modes 0.949. 0.690. 表 3.2-8. 32.8. 4. 穿透能量和偏移量 57. 64.
(75) θ (degree) Offset ( μ m). θ (degree) Offset ( μ m). T. T. 25°. 4.6. 0.984. 50°. 17.8. 0.972. 30°. 6.7. 0.988. 55°. 21.3. 0.966. 35°. 9.0. 0.987. 60°. 25.0. 0.966. 40°. 11.7. 0.984. 65°. 28.8. 0.963. 45°. 14.6. 0.983. 70°. 32.8. 0.958. 表 3.2-9 S-bend 由 25°~70°穿透能量和偏移量. 0.995. Transmitted Power ratio. 0.99 0.985 0.98 0.975 0.97 0.965 0.96 0.955 25. 30. 35. 40. 45. 50. 55. θ(degree). 圖 3.2-26 穿透能量& θ 58. 60. 65. 70.
(76) 第四章 FEMET 理論分析兩段式彎曲波導 4.1 兩段式彎曲波導數值模擬結果 使用 FEMET 分析兩段式彎曲波導其方法與分析 S 型彎曲波導相 同,因此本節我們不在探討其理論分析,我們直接模擬分析兩段式彎 曲波導各種角度能量穿透的情形,假設最初也是 TE 極化場量形式單 一模態入射,我們將可以看出兩段式彎曲波導,在傳播時會有兩模或 多模干涉現象。 兩段式彎曲波導共同參數如下表所示 兩段式彎曲波導參數定義. 設定值. 1.55μ m. 入射波長. Core 折射率. 1.5. Cladding 折射率. 1. 入射區的長度. 4.65μ m. 穿透區的長度. 7.75μ m. 干涉區的長度. 50μ m. Core 的寬度. 2.325μ m. 上牆至 Core 的距離. 31.775μ m. 下牆至 Core 的距離. 31.775μ m. 表 4.1-1. Two corner bend 共同參數. 59.
(77) 兩段式彎曲波導示意圖如 4.1-1 所示,其中 n、 1 n2 分別為 Cladding 和 Core 的折射率 L、 1 L、 t L3 分別為入射區、干涉區、穿透區的長度, Wb 、θ 、W 分別為 Core 的寬度、彎曲角度及電牆與電牆之間的高度, Wc 為牆至 Core 的距離,其它參數的定義為. Lt 2 = Lt − ( Lt1 + Lt 3 ) Wd = tan θ ( Lt − Lt 3 ) Wa = Wd + Wc W = Wa + Wb + Wc Lt1 = Lt 3. Wc. ( II ) EW. (I ). ( III ) n1. Wb. W. Wd Wa. Lt1. θ. n2. EW. n1. Lt 2. L1. Lt 3 L3. Lt. 圖 4.1-1. two corner bend 結構圖. 60.
(78) 我們模擬分析兩段式彎曲波導角度為 5 度、10 度、15 度、20 度、25 度及 30 度其能量圖如圖 4.1-1、圖 4.1-3、 圖 4.1-5、圖 4.1-7、 圖 4.1-9 及圖 4.1-11 所示,我們可以看到當波導在彎曲時會出現有兩 模或多模干涉現象,其所彎曲的角度越大多模干涉的現象將越顯著。 圖 4.1-2、圖 4.1-4、圖 4.1-6、圖 4.1-8、圖 4.1-10 及圖 4.1-12 為 最後一個模態轉換系數和基底模態最小值 θ max 的關系,我們將可以看 出不同的彎曲角度其導波模態的分佈,而表 4.1-1~表 4.1-6 分別表示 每個彎曲角度所代表的穿透能量、偏移量、第一個模態能量、導波模 態及每個彎曲角度所取的模態個數。隨著角度變大相對應的偏移量增 多其穿透能量將越來越小。 最後我們將 S 型彎曲波導與兩段式彎曲波導在相同的偏移量和 干涉區做穿透能量的比較如表 4.1-7,我們可以發現其偏移量較小時 兩段式彎曲波導的穿透能量和 S 型彎曲波導差不多,但隨著偏移量慢 慢增加其穿透能量就遠比 S 型彎曲波導還要低,所以一般我們在模擬 分析彎曲波導,偏移量較小時通常採用兩段式彎曲波導,而偏移量較 大時一般都會採用 S 型彎曲波導。. 61.
(79) (1) θ = 5° 70 0.9 60. 0.8. x-position (μm). 50. 0.7 0.6. 40. 0.5 30. 0.4 0.3. 20. 0.2 10 0.1 0. 10. 20 30 40 z-position (μm). final mode transmission coefficient. 圖 4.1-2. 10. 0. 10. -1. 10. -2. 10. -3. 10. -4. 10. -5. 10. 20. 30. 40. 50. 60. 70. 元件能量分佈圖. θ. 50 60 (degree). 70. 80. 90. max. 圖 4.1-3. 最後一個模態轉換系數與 θ max 的關系. Transmitted Offset ( μ m) First mode Input/output Total FEMET Power ratio ratio Guiding modes modes 0.986. 4.3. 0.788 表 4.1-2. 4. 穿透能量和偏移量. 62. 93.
(80) (2) θ = 10° 1.1. 70. 1 60. 0.9 0.8. x-position (μm). 50. 0.7 40. 0.6 0.5. 30. 0.4 20. 0.3 0.2. 10. 0.1 0 -10. 0. 10. 20 30 40 z-position (μm). final mode transmission coefficient. 圖 4.1-4. 10. 0. 10. -1. 10. -2. 10. -3. 10. -4. 10. 20. 30. 40. 50. 60. 70. 元件能量分佈圖. θ. 50 60 (degree). 70. 80. 90. max. 圖 4.1-5. 最後一個模態轉換系數與 θ max 的關系. Transmitted Offset ( μ m) First mode Input/output Power ratio ratio Guiding modes 0.948. 8.7. 0.416 表 4.1-3. 4. 穿透能量和偏移量. 63. Total FEMET modes 98.
(81) (3) θ = 15° 1.2 70 1. x-position (μm). 60 50. 0.8. 40. 0.6. 30 0.4 20 0.2. 10. -10. 0. 10. 20 30 40 z-position (μm). final mode transmission coefficient. 圖 4.1-6. 10. 0. 10. -1. 10. -2. 10. -3. 10. 20. 30. 40. 50. 60. 70. 元件能量分佈圖. θ. 50 60 (degree). 70. 80. 90. max. 最後一個模態轉換系數與 θ max 的關系. 圖 4.1-7. Transmitted Offset ( μ m) First mode Input/output Power ratio ratio Guiding modes 0.894. 13.3 表 4.1-4. 0.215. 4. 穿透能量和偏移量. 64. Total FEMET modes 104.
(82) (4) θ =20° 1.1. 80. 1. x-position (μm). 70. 0.9. 60. 0.8. 50. 0.7 0.6. 40. 0.5. 30. 0.4. 20. 0.3 0.2. 10. 0.1. 0. 0. 20 40 z-position (μm). final mode transmission coefficient. 圖 4.1-8. 10. 0. 10. -1. 10. -2. 10. -3. 10. -4. 10. 20. 30. 40. 60. 80. 元件能量分佈圖. θ. 50 60 (degree). 70. 80. 90. max. 最後一個模態轉換系數與 θ max 的關系. 圖 4.1-9. Transmitted Offset ( μ m) First mode Input/output Power ratio ratio Guiding modes 0.885. 18.0 表 4.1-5. 0.348. 4. 穿透能量和偏移量. 65. Total FEMET modes 110.
(83) (5) θ =25° 1.1 80. 1. 70. 0.9 0.8. x-position (μm). 60. 0.7. 50. 0.6. 40. 0.5. 30. 0.4 0.3. 20. 0.2 10. 0.1. 0 -20. 0. 20 40 z-position (μm). 60. 80. final mode transmission coefficient. 圖 4.1-10 元件能量分佈圖. 10. 0. 10. -1. 10. -2. 10. -3. 10. -4. 10. 20. 30. 40. θ. 50 60 (degree). 70. 80. 90. max. 圖 4.1-11 最後一個模態轉換系數與 θ max 的關系. Transmitted Offset ( μ m) First mode Input/output Power ratio ratio Guiding modes 0.882. 23.0 表 4.1-6. 0.828. 4. 穿透能量和偏移量. 66. Total FEMET modes 117.
(84) (6) θ =30° 1.1. 90. 1. 80. 0.9. x-position (μm). 70. 0.8. 60. 0.7. 50. 0.6. 40. 0.5 0.4. 30. 0.3 20. 0.2. 10 0. 0.1 -20. 0. 20 40 z-position (μm). 60. 80. final mode transmission coefficient. 圖 4.1-12 元件能量分佈圖能量分佈圖. 10. 0. 10. -1. 10. -2. 10. -3. 10. 20. 30. 40. θ. 50 60 (degree). 70. 80. 90. max. 圖 4.1-13 最後一個模態轉換系數與 θ max 的關系. Transmitted Offset ( μ m) First mode Input/output Total FEMET Power ratio ratio Guiding modes modes 0.551. 28.5 表 4.1-7. 0.117. 4. 穿透能量和偏移量. 67. 124.
(85) Two corner Two corner S-bend S-bend bend bend Offset ( μ m) Transmitted Offset ( μ m) Transmitted Transmitted Transmitted Power ratio Power ratio Power ratio Power ratio 4.6. 0.984. 0.942. 17.8. 0.972. 0.381. 6.7. 0.988. 0.896. 21.3. 0.966. 0.634. 9.0. 0.987. 0.880. 25. 0.966. 0.596. 11.7. 0.984. 0.942. 28.8. 0.963. 0.231. 14.6. 0.983. 0.780. 32.8. 0.958. 0.417. 表 4.1-8 S-bend 和 Two corner bend 穿透能量比較. 68.
(86) 4.2 彎曲波導的能量分析 本節我們將針對彎曲波導不同的折射率、多模(multi-mode)和 單模(signal mode)來觀察場形的變化及波導在彎曲時輻射的情形,圖. 4.2-1、圖 4.2-2 為 S-bend 在不同的折射率單模的能量圖,其中兩者在 輸入波導 core 裡面只存活一個模態,而圖 4.2-1 為 weakly confined 因 此在彎曲時會有少許輻射現象。 圖 4.2-3、圖 4.2-4 分別為 45 度和 70 度 S 型彎曲波導單模入射的 能量圖由於兩者都是 weakly confined,因此,在彎曲時都會有很明顯 的輻射現象,而圖 4.2-5、圖 4.2-6 為 S 型彎曲波導多模入射的能量圖, 由於兩者折射率為 strongly confined 因此能量都會集中在 core 裡面, 在彎曲時並不會有輻射現象。圖 4.2-7、圖 4.2-8 為兩段式彎曲波導在 彎曲 10 度單模入射的能量圖,而圖 4.2-7 為 weakly confined 因此我 們可以看到其能量輻射的現象。 最後我們模擬分析兩段式彎曲波導在 strongly confined 的能量 分佈,如圖 4.2-9、圖 4.2-10 分別彎曲 10 度和 25 度的情形,我們可 以看出其在彎曲時多模干涉的現象。而表 4.2-1~4.2-5 為彎曲波導所 取的參數表及穿透能量的情形。. 69.
(87) (1) S-bend (single mode) θ =10° Radius=100 λ 100. 0.8. 95. 0.7. x-position (μ m). 90. 0.6. 85 80. 0.5. 75. 0.4. 70. 0.3. 65 60. 0.2. 55. 0.1. 50. -10. 0. 10 20 z-position (μ m). 30. 40. 50. 圖 4.2-1 元件能量分佈圖. 1.2 100 95. 1. x-position (μ m). 90 85. 0.8. 80 0.6. 75 70. 0.4. 65 60. 0.2. 55 50. -10. 0. 10 20 z-position (μ m). 30. 40. 50. 圖 4.2-2 元件能量分佈圖. Core. index. 0.903 λ 0.447 λ. 1.5:1.4 1.5: 1. Transmitted Power ratio 0.910 0.943. Guiding mode 1 1. 表 4.2-1 S-bend 參數&模態數. 70. Total FEMET modes 94 66.
(88) (2) S-bend (single mode) index=1.5:1.4 core=1.5λ 0.8. 150 140. 0.7. x-position (μ m). 130. 0.6. 120 110. 0.5. 100. 0.4. 90 0.3. 80. 0.2. 70 60. 0.1. 50 -40. -20. 0. 20 40 z-position (μ m). 60. 80. x-position (μ m). 圖 4.2-3 S-bend 元件能量分佈圖. 180. 0.8. 160. 0.7 0.6. 140. 0.5 120 0.4 100. 0.3. 80. 0.2. 60. 0.1 -40. -20. 0. 20 40 60 z-position (μ m). 80. 100. 120. 圖 4.2-4 S-bend 元件能量分佈圖. Bending angle( θ ) 45° 70°. Transmitted Radius( μ m ) Power ratio 0.224 25 λ 0.181 25 λ 表 3.2-2. Guiding mode 1 1. S-bend 參數&模態數 71. Total FEMET modes 151 157.
(89) (2) S-bend (Multi-modes) index=3.5:1 core=1.5λ 110. 1.4. 100. 1.2 1. x-position (μ m). 90. 0.8. 80. 0.6 70 0.4 60 0.2 50 -20. -10. 0. 10 20 30 z-position (μ m). 40. 50. 60. 圖 4.2-5 S-bend 元件能量分佈圖. 1.4. x-position (μ m). 120 110. 1.2. 100. 1. 90. 0.8. 80. 0.6. 70. 0.4. 60 50 -20. 0.2 0. 20 40 z-position (μ m). 60. 圖 4.2-6 S-bend 元件能量分佈圖. Bending angle( θ ) 30° 45°. Transmitted Radius( μ m ) Power ratio 0.878 25 λ 0.495 25 λ 表 3.2-3. Guiding modes 11 11. S-bend 參數&模態數. 72. Total FEMET modes 77 80.
(90) (3) Two corner bend (Single mode) θ =10° 70 0.8. x-position (μm). 60. 0.7. 50. 0.6. 40. 0.5 0.4. 30. 0.3 20 0.2 10. -10. 0.1 0. 10. 20 30 40 z-position (μm). 50. 60. 70. 圖 4.2-7 Two corner bend 元件能量分佈圖. 70. 1.2. 60. 1. x-position (μm). 50 0.8 40 0.6 30 0.4. 20. 0.2. 10 0 -10. 0. 10. 20 30 40 z-position (μm). 50. 60. 70. 圖 4.2-8 Two corner bend 元件能量分佈圖. Core. index. 0.903 λ 0.447 λ. 1.5:1.4 1.5:1 表 3.2-4. Transmitted Power ratio 0.573 0.957. Guiding mode 1 1. Two corner bend 參數&模態數. 73. Total FEMET modes 134 95.
(91) (4) Two corner bend (multi-mode) core=1.5λ 70. 1.2. 60 1 x-position (μm). 50 0.8 40 0.6. 30. 0.4. 20. 0.2. 10 0. -10. 0. 10. 20 30 40 z-position (μm). 50. 60. 70. 圖 4.2-9 Two corner bend 元件能量分佈圖. 1.4 80 1.2. x-position (μm). 70 60. 1. 50. 0.8. 40. 0.6. 30 0.4. 20. 0.2. 10 0 -20. 0. 20 40 z-position (μm). 60. 80. 圖 4.2-10 Two corner bend 元件能量分佈圖. Bending angle( θ ) 10° 25°. index 3.5:1 3.5:1 表 4.2-5. Transmitted Power ratio 0.963 0.629. Guiding modes 11 11. Two corner bend 參數&模態數. 74. Total FEMET modes 104 122.
(92) 4.3 彎曲波導的驗正 此節我們將針對 S 型彎曲波導牆所擺的位置、切的區域及所取 的模態個數對穿透能量的影響,首先我們先對彎曲為 15 度、35 度及. 65 度牆所擺的位置來分析如表 4.3-1~4.3-3,其中 WC 為牆的位置, TE 為 Core 裡的穿透能量,T 為穿透系數我們可以看出其牆的遠近對穿 透能量並沒有很大的影響,其誤差值都很小。. Radius ( μ m). index. Nλ. Guiding modes. λ ( μ m). 50. 1.5:1. 30. 4. 1.55. 表 4.3-1 S-bend 參數. 15°. θ T. T1. T2. T3. T4. 10(0.98912). 0.58176. 0.80204. 0.08177. 0.02673. 15(0.98926). 0.58169. 0.80217. 0.08172. 0.02694. 20(0.98900). 0.58179. 0.80196. 0.08157. 0.02673. 25(0.98909). 0.58175. 0.80204. 0.08157. 0.02687. 30(0.98895). 0.58180. 0.80193. 0.08149. 0.02673. 35(0.98880). 0.58184. 0.80184. 0.08126. 0.02667. 40(0.98886). 0.58182. 0.80188. 0.08129. 0.02677. Wc (TE ). 表 4.3-2 S-bend 牆的位置對穿透能量及穿透系數的影響. 75.
(93) 35°. θ T. T1. T2. T3. T4. 10(0.94701). 0.65569. 0.71623. 0.06356. 0.00692. 15(0.94215). 0.65571. 0.71256. 0.06632. 0.00651. 20(0.94378). 0.66036. 0.70965. 0.06367. 0.00599. 25(0.94077). 0.66726. 0.70086. 0.06542. 0.00584. 30(0.93881). 0.66504. 0.70124. 0.06894. 0.00590. 35(0.94042). 0.66672. 0.70111. 0.06572. 0.00586. 40(0.93906). 0.66485. 0.70165. 0.06838. 0.00593. Wc (TE ). 表 4.3-3 S-bend 牆的位置對穿透能量及穿透系數的影響. 65°. θ T. T1. T2. T3. T4. 10(0.74479). 0.78245. 0.36153. 0.04057. 0.01444. 15(0.72497). 0.82738. 0.10730. 0.16786. 0.02672. 20(0.73368). 0.85483. 0.04503. 0.02676. 0.01384. 25(0.71497). 0.82881. 0.07725. 0.14786. 0.01467. 30(0.72647). 0.84795. 0.07627. 0.03899. 0.01084. 35(0.71069). 0.82167. 0.13016. 0.13584. 0.01227. 40(0.72141). 0.83696. 0.13508. 0.05068. 0.00941. Wc (TE ). 表 4.3-4 S-bend 牆的位置對穿透能量及穿透系數的影響. 76.
數據

+7
Outline
相關文件
本模組的編碼法適合 Command mode/Data mode 切換先連續發射 10 次 High、Low 信號作為前導波形接著發射起始波形 600 微秒 High→600 微秒 Low→600 微秒 High→400 微秒
Simulation conditions are introduced first and various characteristics in three defect designs, such as single mode laser wavelength shift and laser mode change, are analyzed.
點骨架,左下角點選 Pose
簡報裡展現一枚以拉斐爾的名畫一角做成的郵 票。 請搜尋這幅畫的全貌,並模仿美術館導覽
相關分析 (correlation analysis) 是分析變異數間關係的
Failure Mode and Effects Analysis (Failure Modes and Effects Analysis, FMEA) is used to analyze the product / system, the potential failure modes, identify potential trouble spots
接下來的 FDTD 疊代運算將是整個計算的核心,也是運算量最大 的部分,在這中間,如何利用光波導的性質以及傳播常數等特徵參量
在軟體的使用方面,使用 Simulink 來進行。Simulink 是一種分析與模擬動態
