行政院國家科學委員會專題研究計畫成果報告
利用訊號分離改善管道聲傳之主動控制之聲音回授
計畫編號:NSC 90-2611-E-002-021
執行期限:90 年 08 月 01 日至 91 年 07 月 31 日
主持人:陳國在 國立台灣大學工程科學及海洋工程學系
一、 中文摘要
本研究旨在利用聲學回授之訊號分離探討適應性主動控制方法對管 道中低頻聲音達到消音效果。因此本研究分別利用 FIR 與 IIR 之數位濾波 器,來作為控制系統之主體架構,並以演算法來即時修正數位濾波器之係 數,以求得最佳的控制效果。 根據研究結果利用體速度相消法及相關適應性控制演算式結合進行障板 的振動主動控制於其最低共振頻率 132Hz 之最大透過損失改善效果可達六 分貝。上述之透過損失改善效果將隨頻率之增加而遞減且共振頻率位置之 改善效果亦較非共振者理想。二、 計畫緣由及目的
論及適應性控制系統在任意聲場之主動控制(不論是三維之封閉空間抑或一 二維管道聲場之主動控制衰減),為獲取較佳控制效果,參考訓號(reference signal) 之取得,大都以與直接物理量之聲學微音器(microphone)為之。根據相關研究文 獻[1~20],顯示對主要噪音源(primary source)之控制效果,往往因參考感應器受 第二聲源(secondary source)衍生之聲學回授(acoustic feedback)之影響,而大打折 扣。雖過去之相關研究亦曾選用直接避開管道聲回授之感測器如於主要聲源表面 中心貼上加速規(accelerometer)將所量到訊號作為控制程序之參考輸入,抑或採 用延伸或變截面以降低聲音回授。然其控制成效雖具改善,卻仍未盡理想。 為解決以上之管道聲傳之回受問題,本文研究採取與文獻研究不同的處理方 式,即利用訊號分離技術,將受第二聲聲音回授汙染之主要聲源訊號予以分離 後,再納入適應性控制程序。如此參考賣客風即可讀取主要聲源之直接參考訊 號,而可使控制程序達及最佳之控制成效。三、結果與討論
(一)、理論解析 1 一維管道之聲音主動控制 適應性主動控制系統架構,可以圖一示之。聲音相干涉之基礎,係將主要音 源(Primary Source)所產生之聲波視為平面波。根據文獻[10-11],當主要音源的 頻率小於管道之截止頻率時,管道內聲波,可視為以一維平面波模式之傳播,即: r c f π 2 84 . 1 < ………(1)其中 f 為主要噪音源聲音頻率(Hz),c 為聲波在介質中傳遞之速度(m/s),r 為圓 管的半徑 (m)。
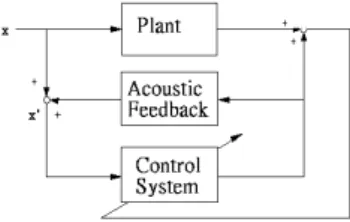
又如圖一所示,前置感測麥克風(Detector Microphone)量測主要音源後,再 將前置麥克風量測到之類比訊號,經由類比數位轉換(Analog to Digital Converter) 成數位訊號作為數位控制系統(Digital Control System)的輸入。以上之控制系統 是 以 一 數 位 濾 波 器 為 核 心 , 目 的 在 於 經 數 位 / 類 比 轉 換 (Digital to Analog Converter)後,將類比訊號經擴大器產生一個干涉音場,此干涉音場即是上圖之 第二聲源(Secondary Source),而此干涉音場與主要音源具相同振幅,但相反的 相位,藉此特性即可達到第二聲源的下游能夠大幅消音的目的。 於第二聲源的下游,放置的誤差麥克風(Error Microphone),其作用是量測 第二聲源作動後,經聲音干涉相消後的下游殘留聲場,並透過類比/數位轉換成 數位訊號,提供給數位控制系統經由演算法來作系統係數即時修正的工作,整個 系統的方塊圖如圖二所示。由圖二可知,量測訊號之麥克風會同時量測到主要音 源所產生之音以及第二聲源所回授的音,也就是圖二的 x’,但控制系統所需要的 輸入是乾淨未受回授聲音污染之來自第一聲源之音,也就是上圖的 x,所以在我 們進行適應性主動控制前需先找出回授聲源的轉移函數(Transfer Function),在 進行適應性主動控制時,即利用此轉移函數求出回授的聲音訊號,進而將前置麥 克風所量測合成訊號分離出我們所需的對應第一聲源之音,上述方法將詳述於 後。 2 數位濾波器 所有將一個輸入的序列轉換成另一個序列的演算法,都可以稱為數位濾波器 (Digital Filter)[14-17],而數位濾波器可說是數位控制系統之理論核心,而離散 時間域下之輸入與輸出的關係,可以差分方程式表示如下: ) ( ) ( ) ( 1 0 j k y a i k x b k y n j j m i i − − − =
∑
∑
= = ………(2) 而其轉移函數經由 z 轉換可表示成 j n j j i m i i z a z b z X z Y z H − = − =∑
∑
+ = = 1 0 1 ) ( ) ( ) ( ………(3)該形式之數位濾波器為無限脈衝響應濾波器(Infinite Impulse Response Filter), 簡稱 IIR 數位濾波器。在(2)式中,當 j =1至 m 時的係數a 皆等於 0,則(2)式可j 改寫成 ) ( ) ( 0 i k x b k y m i i − =
∑
= ………(4) 此時的轉移函數經 z 轉換可表示成 i m i iz b z X z Y z H − =∑
= = 0 ) ( ) ( ) ( ………(5)此種形式之數位濾波器為有限脈衝響應濾波器(Finite Impulse Response Filter),簡稱 FIR 數位濾波器。
3 LMS 演算法
由(3)式中可知 IIR 數位濾波器中具有模型係數a 、1 a 、2 a3 ……a 及n b 、0 1
節之中,吾人皆以較複雜 IIR 結構之數位濾波器來說明 LMS 演算法。將(3)式中 的分子項假設為 i m i iz b z B − =
∑
= 0 ) ( ………(6) 將分母設為1+A(z),其中 j n j jz a z A − =∑
= 1 ) ( ………(7) 由以上推論可知,設計一個 IIR 數位濾波器,首先要決定模型係數a 、1 a 、2 3 a ……a 及n b 、0 b 、1 b ……2 b ,理論上 IIR 數位濾波器的模型係數是無限項m 的,但是在實際演算中,只能以有限項參數來逼近此無限項係數。將數位濾波器 的模型係數與輸入序列寫成向量形式: = Φ m n b b b a a a M M 1 0 2 1 , X = − − − − − − − − ) ( ) 1 ( ) ( ) ( ) 2 ( ) 1 ( m k x k x k x n k y k y k y M M 可以求得數位濾波器的輸出訊號 X k y( )=ΦT ………(8) 將上式與實驗過程中之期望輸出訊號(Desired Output Signal)y1(k)做比較,可求 得其誤差訊號(Error Signal) − − − − = − =∑
∑
= = ) ( ) ( ) ( ) ( ) ( ) ( 1 0 1 1 k y k y k bx k i a y k j y k e n j j m i i ……(9) 即 X k y k e = −ΦT ) ( ) ( 1 ………(10) 為了使數位濾波器達到最佳化控制,必須定義一價值函數(Cost Function) J [18] 以修正數位濾波器的係數向量Φ,此價值函數定義為誤差估計均方值(Mean)之 期望值,價值函數定義如下:[
2]
)) ( (e k E J = ….………(11) 將(10)式代入(11)式中:[
2]
1( ) ) (y k X E J = −ΦT[
]
[
]
[
]
2 1 2 1(k) 2E y (k)X E X y E − T Φ+ ΦT = ………(12) 又ΦTX = XTΦ,所以(12)式可改寫成[
]
[
]
[
]
2 1 2 1( ) −2 ( ) Φ+ Φ = T T X E X k y E k y E J ………(13)為了逼近 IIR 數位濾波器的最佳係數,需由最陡下降法(Method of least descent) 演算式使得價值函數達最小值,藉由價值函數的梯度向量,往成本函數最小值的 方向來修正數位濾波器的模型係數向量Φ如下: ) ( old old new J Φ ∂ ∂ − + Φ = Φ µ ………(14) 因此考慮價值函數的梯度向量
[
T]
[
T T]
X X E X k y E J =− + Φ Φ ∂ ∂ 2 ) ( 2 1[
T] [
T]
X E X k y E − Φ − = 2 1( )[
] [
T]
X E k e E ( ) 2 − = ………(15) 將(15)式代入(14)式中則可求得數位濾波器中的模型係數Φ的序列表示式:[
] [
T]
old new =Φ +2µE e(k) E X Φ ………(16) µ 稱為步階參數(Step-Size Parameter),主要關係著控制系統的穩定性與收斂速 度,而在實驗過程中,透過誤差麥克風測量而得的誤差訊號e(k),即時透過 LMS 演算式向價值函數極小值的方向來調整數位濾波器的模型係數Φ,而當第二聲源 下游部分達到聲音干涉消音的結果時,誤差訊號e(k)將變得極小,而模型係數Φ 也因此會收斂於一定範圍之內。在實驗方面,如要求得價值函數的正確梯度有實 行上的困難,所以我們在實際應用時,採用短時間內估測梯度之平均值,來作為 演算式中梯度運算,如此才可避免梯度的偏差,而估測梯度的次數,和系統控制 效果有著極大影響,若估測次數過少,雖然數位濾波器的模型係數更新較快,適 應的時間較短,但系統卻較不穩定,若估測次數過多,數位濾波器的模型係數更 新較慢,適應時間則較長但系統卻越穩定。 (二)、實驗測定: 本文的實驗步驟可分四大部分: 1. 通常以前置麥克風量取輸入訊號時會量測到第一聲源與第二聲源的合 成訊號,但第二聲源是根據第一聲源的輸入而發出的控制聲源,所以需 先以量取加速振動訊號的方式來決定第二聲源。 2. 利用上述第二聲源來求出回授至前置麥克風之轉移函數。 3. 再以前置麥克風量測到的合成訊號扣除第二聲源回授至前置麥克風的 訊號,來當作本實驗之參考輸入訊號。 4. 最後採用 FIR 及 IIR 濾波器之控制系統配合 LMS 演算法,再透過數位/, 類比轉換成類比訊號,將轉換後的訊號結果輸出至擴音器產生干涉音場 以達消音效果。 實驗結果列於表一~表九。 〈三〉結論 根據本計畫之研究結果可得以下之結論: 本論文分別採用 FIR 與 IIR 數位濾波器作為適應性控制核心,並利用 LMS 演算法來即時修正數位濾波器的模型係數,利用此適應性控制的觀念,對管道內 之聲音傳輸進行干涉消音處理。根據實驗結果,可以得到以下之結論: (1) 針對單一頻率之主要噪音源,可降低 30dB 以上之音壓位準衰減量,對於雙 頻率之主要音源,也有 20dB 左右的衰減量。 (2) 在聲學回授方面,透過回授聲場轉移函數的估測,由實驗結果可知,確能有 效的減低聲場回授的影響,進而求取出未受第二聲源污染之主要聲源,以進 行適應性主動控制。在控制效果方面的比較,與文獻[19]中,以加速規量取 振動訊號的主動控制消音實驗結果相當;與文獻[20]中,利用擴張管降低聲 學回授影響之主動控制消音實驗結果亦相近,但在本文中之實驗能以不改變 噪音源之外型結構為前提,達到消音之目的。 (3) 對於數位濾波器選擇方面,因為其階數與微處理器之運算量有密切的關係, 所以在實際實驗效果上並不一定是選擇何種數位濾波器,就會有較佳的效果,還需要考慮數位濾波器之係數階數的選擇,系統軟、硬體之配合,實驗 外在環境的影響等等,FIR 與 IIR 數位濾波器各有其利弊,所以在實際應用 時,可以此兩種濾波器交互比對,以決定數位控制系統之架構。 (4) 在 LMS 演算法方面,演算法對數位濾波器係數的修正,是控制過程的關鍵 所在,因此步階參數的選擇對系統的穩定性、控制的效果、控制的時間皆有 一定的影響。
Fig.1 The configuration for the acoustic interference Fig.2 The block diagram for active
Table 1The comparison of sound pressure levels between Table 2 The comparison of sound pressure after and before active controls at 50 Hz between after and before control at 80Hz
Table 3. The comparison of sound pressure Table 4. The comparison of sound pressure after and before active controls at 100 Hz between after and before control at 160Hz
Table5 The comparison of sound pressure levels between Table 6 The comparison of sound pressure after and before active controls at 200 Hz between after and before control at 250Hz
Table 7The comparison of sound pressure levels between Table 8 The comparison of sound pressure after and before active controls at 315 Hz between after and before control at 150,200Hz
Table 9 The comparison of sound pressure levels Of a dual-tonal sound before and after control at
300,315 Hz