在機會網路上使用機率預測法搜尋行動代理人 之機制 - 政大學術集成
126
0
0
全文
(2) 在機會網路上使用機率預測法搜尋行動代理人 之機制 Using Probabilistic Prediction Method in the Search of Mobile Agents over Opportunistic Network. 研 究 生:游筱慈. Student:Hsiao-Tzu You. Advisor:Yao-Nan Lien 政 治 大. 指導教授:連耀南. 國立政治大學 資訊科學系. 學. ‧ 國. 立. 碩士論文. y. ‧. Nat. io. sit. A Thesis. er. submitted to Department of Computer Science. a. n. v l C Chengchi University National ni U. h. i Requirements e n g cofhthe in partial fulfillment for the degree of Master in Computer Science. 中華民國一百零二年五月 May 2013.
(3) 在機會網路上使用機率預測法搜尋行動代理人之機制 摘要 在機會網路上,訊息的遞送遠比一般網路來得困難許多,溝通交換資訊效率 很低。本篇論文以山文誌資訊系統為背景,假設在山區中已佈建完成控制節點 並組成控制網路,以及行動代理人機制已導入在控制網路上用來搜尋移動的目. 治 政 標節點。其中行動代理人附屬於登山客所攜帶的設備上,欲搜尋的目標節點會 大 立 ‧ 國. 學. 沿著登山路徑不斷移動造成搜尋上的困難,若搜尋失敗不只拉長延後了搜 尋時間,也可能錯失黃金救難時間造成極大的損失,如何增進搜尋效率是. ‧. 機會網路上相當重要的議題。為此,本文提出一個搜尋方法,在任意的時間. sit. y. Nat. 點計算目標行動節點落在每個控制節點之間路段的機率,預測目標代理人的位. er. io. n. al 置,就可依機率高低逐次搜尋各路段,以提高搜尋效率。我們以山文誌登山資 iv. n U engchi 訊系統,作為參考的機會網路,提出兩個模型,使用機率預測搜尋法,預測行. Ch. 動節點可能所在位置優先搜尋此路段來降低整體搜尋時間,透過一連串的實驗 驗證機率模型之準確度,並評估本法之搜尋效率以及當各路段花費時間的機 率分佈假設有誤時,搜尋效率的受損程度。在我們的實驗中,機率模型之準 確度極高,誤差不超過 7.59%,搜尋效率都在 44.44 以上,即使機率分佈錯誤 ,搜尋效能仍高於二分搜尋法約 2 倍。 i.
(4) Using Probabilistic Prediction Method in the Search of Mobile Agents over Opportunistic Network Abstract Since transmitting data on an opportunistic network is more difficult than that on a general network, information exchanging is less efficient. Based on “CenWits” system, we assume that control point has entirely construed all over the. 政 治 大. mountains and a control network has completed altogether; meanwhile, the. 立. mobile agent mechanism has applied in the searching of mobile target nodes.. ‧ 國. 學. With mobile agent attached on the equipment of hikers, the target agent moving constantly along the hiking path grows the difficulties in searching. The failure. ‧. in locating the mobile agent possibly not only prolongs the searching time, but. y. Nat. sit. also misses the golden time of life saving, and causes enormously damages. a. er. io. eventually. Therefore, figuring that “improving the efficiency of searching” is a. n. v l network, in this thesis major issue in opportunistic n i we develop a searching Ch. U i e h n c g method which enables us to calculate the probability where a mobile target agent locates in every edge between control points in any arbitrary time point. Through forecasting the location of the target agent, we can start searching from the edge with the highest probability, thus enhance the efficiency of searching. Using “CenWits” system as reference opportunistic network, we designed two probability models as well as associated search methods. We conducted a series of experiments to evaluate the accuracy of probabilistic models and the performance of the proposed search methods. In our experiments, ii.
(5) the error of probability models is no more than 7.59%. Our proposed methods out perform Basic Binary Search by 44.44 in average. Furthermore, assuming that there is a discrepancy between the probability assumptions and the real distribution of the traveling time spent on each edge, we evaluate the performance degradation too. The experimental results show that under such circumstance, our Probabilistic Prediction Method can even outperform Basic Binary Search by approximately 200%.. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. iii. i n U. v.
(6) 致謝辭 感謝連耀南教授帶領著我做研究,訓練學生獨立思考並詢詢善誘讓這 份論文盡可能完善,在完稿的這一刻心中有著滿滿的成就感並對指導教授 懷著感恩心情。做研究常有一種前不見古人,後不見來者的孤獨感,謝謝 始終替我打氣,一起做研究、玩耍、打球的 MC 玩樂幫,里長伯我跟高材. 政 治 大. 生等妳回來穿球衣逛威秀搭貓纜。更感謝讓我不需做家事,替我帶便當的. 立. 家人,這段時間著實辛苦了,尤其是最近艱難的日子,我即將歸隊與你們. ‧ 國. 學. 患難與共,最好能榮華共享。親愛的父親願您身體康復,與母親完成不老. ‧. 騎士環島傳說。親愛的母親,感恩您始終樂觀,給我精神上最大的支持,. y. Nat. er. io. sit. 也祝您 candy crush 早日破關。親愛的喬,願你人生知足圓滿,並擁有一顆 上進的心,成為最帥氣的陽光宅男。親愛的 Tzying,妳幽默風趣天真認真 a. n. iv l C n hengchi U 嚴肅的個性,讓我每天心情愉悅,認識妳真好,我的願望是達成妳所有的. 夢想。親愛的娜娜老師,沒有妳這份論文沒有第五頁,很榮幸在政大遇見 妳,替我抱不平及一起對抗惡勢力。親愛的高材生阿衣,謝謝妳一直以來 幫了我許多忙,還送我體驗卡,有妳陪伴總是開心。親愛的幫主,謝謝妳 在我貧困的時候讓我有個棲身之處,我們這輩子都要努力搶錢共勉之。親 愛的太多,最後將這份榮耀獻給我最親愛的家人、指導教授及親朋好友。 游筱慈 May 2013 政治大學 iv.
(7) 目錄 第 1 章 .................................................................................................................................... 1 緒論 ........................................................................................................................................ 1 1.1. 研究背景與目的 .................................................................................................... 1. 1.2. 機會網路 ................................................................................................................ 2 1.2.1. 機會網路的訊息交換機制 ........................................................................ 3. 1.2.2. 機會網路的研究議題 ................................................................................ 4. 1.2.3. 行動代理人 ............................................................................................................ 8. io. y. 機會網路上的行動代理人運作 .............................................................. 13. al. v i n Ch 行動代理人平台的功能需求 .................................................................. 13 engchi U n. 1.4.2. sit. 運用行動代理人於機會網路 .............................................................................. 12 1.4.1. 1.5. 行動代理人的應用 .................................................................................. 11. er. 1.4. 行動代理人的優點 .................................................................................. 10. Nat. 1.3.3. 行動代理人的特點 .................................................................................... 9. ‧. 1.3.2. 學. 1.3.1. ‧ 國. 1.3. 政 治 大 機會網路的應用 ........................................................................................ 6 立. 論文組織架構 ...................................................................................................... 14. 第 2 章 相關研究與文獻探討 ............................................................................................ 16 2.1. 機會網路上搜尋行動代理人之挑戰 .................................................................. 16. 2.2. 「山文誌登山資訊系統」簡介 .......................................................................... 16. 2.3. 機會網路上使用控制網路搜尋行動代理人 ...................................................... 20. 2.4. 2.3.1. 控制網路概念 .......................................................................................... 21. 2.3.2. 利用控制網路的搜尋策略 ...................................................................... 22. 控制網路上控制節點選擇問題之相關研究 ...................................................... 23 v.
(8) 2.4.1. 控制網路的建置 ...................................................................................... 23. 2.4.2. 環境假設 .................................................................................................. 24. 2.4.3. 設計考量與目標 ...................................................................................... 24. 2.4.4. 控制點選擇問題—最大總流量模型 ...................................................... 25. 2.4.5. 控制點選擇問題—最大涵蓋率模型 ...................................................... 25. 2.4.6. 控制點選擇問題—最大加權涵蓋率模型 .............................................. 26. 第 3 章 機會網路上行動代理人搜尋控制點選擇問題及解決方案 ................................ 27. 解決方案的演算法 .............................................................................................. 29. 3.3.4. CPSP-Coverage 改進式解決方案- NPF2 演算法 ................................. 32 CPSP-Utility 改進式解決方案- NPF-U2 演算法 .................................. 35. y. Nat. 3.3.3. 控制點選擇問題的評估指標 .................................................................. 30. ‧. 3.3.2. 學. 3.3.1. CPSP-Utility-Flow 解決方案- NPF-PF 演算法 ..................................... 38. io. sit. 3.3. er. 3.2. 政 治 大 最大複合加權涵蓋率的數學模型 ...................................................................... 28 立 控制點選擇問題-最大複合加權涵蓋率模型 ..................................................... 27. ‧ 國. 3.1. 第 4 章 機會網路上行動代理人位置之預測方法 ............................................................ 40. al. n. v i n C h .................................................................................. 預測方法設計理念與目標 40 engchi U. 4.1 4.2. 4.3. 問題定義 .............................................................................................................. 41 4.2.1. 控制網路下搜尋名詞定義 ...................................................................... 41. 4.2.2. 問題模型 .................................................................................................. 42. 機率預測函數 ...................................................................................................... 44 4.3.1. Gamma 分配 ............................................................................................ 45. 4.3.2. 模型一使用計算機率預測法之搜尋程序 .............................................. 47. 4.3.3. 模型二使用計算機率預測法之搜尋程序 .............................................. 49. 第 5 章 效能評估 ................................................................................................................ 52 vi.
(9) 5.1. 實驗設計 .............................................................................................................. 52. 5.2. 控制點選擇問題效能評估 .................................................................................. 54 5.2.1. 小型問題效能評估 .................................................................................. 54. 5.2.2. 實驗 1A 環境參數設定 ........................................................................... 54. 5.2.3. 實驗 1A 結果與分析 ............................................................................... 55. 5.2.4. 大型問題效能評估 .................................................................................. 60. 5.2.5. 實驗 1B 環境參數設定 ........................................................................... 61. 5.2.6. 實驗 1B 結果與分析 ............................................................................... 61. 5.2.8. 學. 機率預測搜尋法效能評估 .................................................................................. 67. 單一路徑機率預測搜尋法效能評估 ...................................................... 74. 5.3.4. 多重路徑機率預測準確度實驗 .............................................................. 94. sit. al. v i n Ch 多重路徑機率預測搜尋法效能評估 ...................................................... 97 engchi U n. 5.3.6. 單一路徑錯誤容忍度實驗 ...................................................................... 78. io. 5.3.5. y. 5.3.3. Nat. 5.3.2. 單一路徑機率預測準確度實驗 .............................................................. 68. ‧. 5.3.1. er. 5.3. 實驗 1C 結果與分析 ............................................................................... 64. ‧ 國. 5.2.7. 政 治 大 實驗 1C 環境參數設定 ........................................................................... 64 立. 多重路徑錯誤容忍度實驗 ...................................................................... 99. 第 6 章 結論與未來研究 .................................................................................................. 107 參考文獻 ............................................................................................................................ 109. vii.
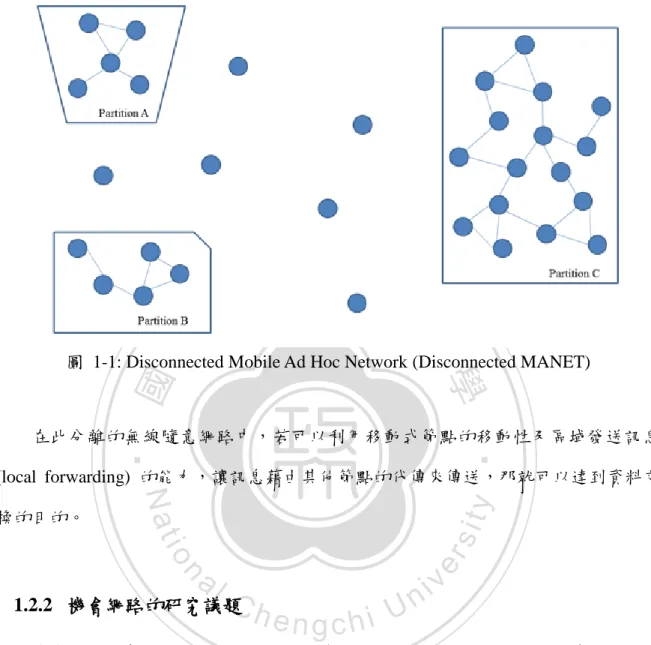
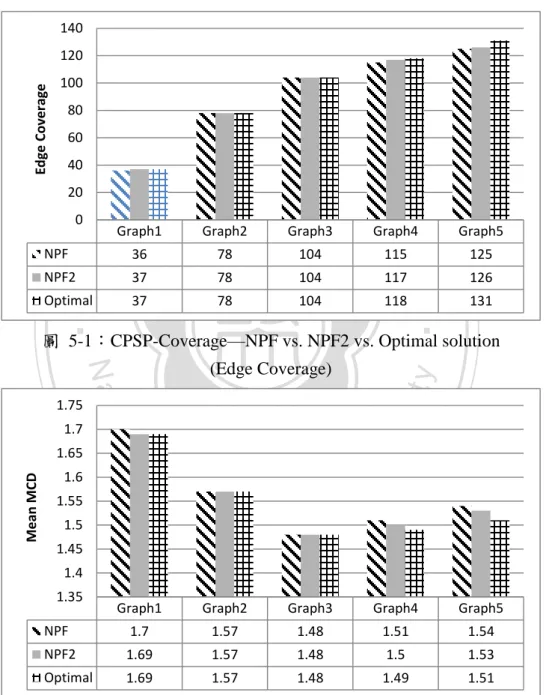
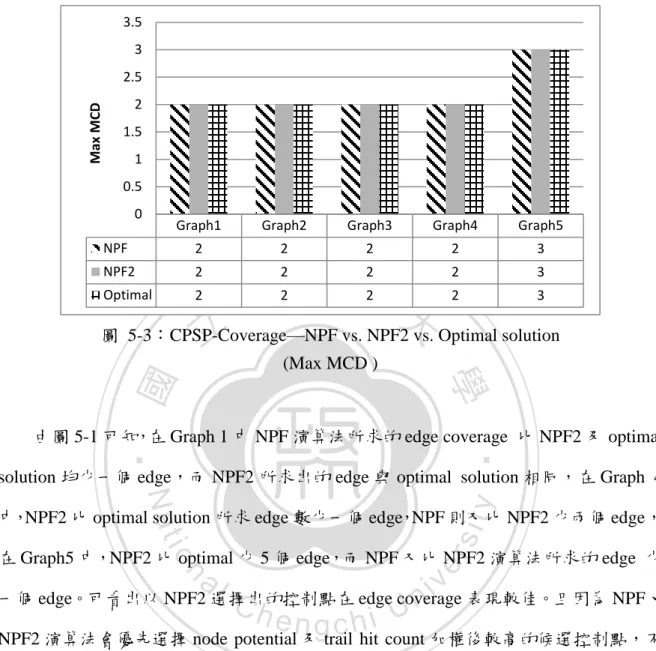
(10) 圖目錄 圖 1-1: Disconnected Mobile Ad Hoc Network (Disconnected MANET) ............................ 4 圖 2-1:山文誌登山系統-登山客黑盒子 ............................................................................. 19 圖 2-2:山文誌登山系統-基地台(簡易型與太陽能型) ...................................................... 20 圖 2-3:在機會網路上搜尋行動代理人 (以「山文誌登山資訊系統」應用情境為例) .. 21 圖 2-4︰使用控制網路來輔助行動代理人的搜尋............................................................ 22. 政 治 大 圖 3-2︰Node Potential First-U2 (NPF-U2) 演算法之運作流程 ...................................... 37 立 圖 3-1: Node Potential First 2 (NPF2) 演算法之運作流程 ............................................... 34. 圖 3-3︰Node Potential First-PF (NPF-PF) 演算法之運作流程 ....................................... 39. ‧ 國. 學. 圖 4-1:控制網路底下行動代理人的搜尋及其名詞定義 .................................................. 42. ‧. 圖 4-2:問題模型一情境 ...................................................................................................... 43. y. Nat. 圖 4-3:問題模型二情境 ...................................................................................................... 44. er. al. n. Pe ,t. io. 圖 4-5:. sit. 圖 4-4:Gamma 分配機率密度函數 ..................................................................................... 45. v. 之推導 .............................................................................................................. 47. Ch. engchi. i n U. 圖 4-6:機率預測搜尋演算法-單一路徑(PPM-S) ............................................................... 49 圖 4-7:. qe ,t. 之推導 ............................................................................................................. 50. 圖 4-8: 機率預測搜尋演算法-多重路徑(PPM-M)............................................................ 51 圖 5-1︰CPSP-Coverage—NPF vs. NPF2 vs. Optimal solution (Edge Coverage).......... 55 圖 5-2︰CPSP-Coverage—NPF vs. NPF2 vs. Optimal solution (Mean MCD) ............... 55 圖 5-3︰CPSP-Coverage—NPF vs. NPF2 vs. Optimal solution (Max MCD ) ................ 56 圖 5-4︰CPSP-Utility—NPF-U vs. NPF-U2 vs. Optimal solution (Weighted Edge Coverage ) .......................................................................................................................... 57 viii.
(11) 圖 5-5︰CPSP-Utility—NPF-U vs. NPF-U2 vs. Optimal solution (Mean Weighted MCD) ............................................................................................................................................ 58 圖 5-6︰CPSP-Utility-Flow—NPF-PF vs. Optimal solution (Populated Edge Coverage) ............................................................................................................................................ 59 圖 5-7︰CPSP-Utility-Flow—NPF-PF vs. Optimal solution (Mean Populated MCD) ... 59 圖 5-8︰各 NPF 演算法之效能比較 (Edge Coverage) (Sensitivity of edge coverage on the number of nodes) ............................................................................................................... 62. 政 治 大 edge coverage on the number of nodes) ............................................................................ 62 立. 圖 5-9︰各 NPF 演算法之效能比較 (Populated Edge Coverage) (Sensitivity of populated. 圖 5-10︰各 NPF 演算法之效能比較 (Mean Weighted MCD) (Sensitivity of mean. ‧ 國. 學. weighted MCD on the number of nodes) ........................................................................... 63. ‧. 圖 5-11︰各 NPF 演算法之效能比較 (Mean Populated MCD) (Sensitivity of mean. y. Nat. populated MCD on the number of nodes).......................................................................... 63. er. io. sit. 圖 5-12︰各 NPF 演算法之效能比較 (Weighted Edge Coverage) (Sensitivity of weighted edge coverage on the number of trails) .............................................................................. 65. al. n. v i n C h (Populated Edge 圖 5-13︰各 NPF 演算法之效能比較 Coverage) (Sensitivity of engchi U. populated edge coverage on the number of trails) ............................................................. 66. 圖 5-14︰各 NPF 演算法之效能比較 (Mean Weighted MCD) (Sensitivity of mean weighted MCD on the number of trails) ............................................................................ 66 圖 5-15︰各 NPF 演算法之效能比較 (Mean Populated MCD) (Sensitivity of mean populated MCD on the number of trails) ........................................................................... 67 圖 5-16︰Gamma Distribution PDF (shape=2,scale=2) ...................................................... 69 圖 5-17︰Gamma Distribution PDF (shape=3,scale=2) ...................................................... 69 圖 5-18︰Gamma Distribution PDF(shape=4,scale=2) ....................................................... 70 ix.
(12) 圖 5-19︰Gamma Distribution PDF (shape=5,scale=2) ...................................................... 70 圖 5-20:實驗 2A-1 出發後 10-100 分鐘 計算值與實驗值平均偏差(預測準確度實驗) 71 圖 5-21: 實驗 2A-1,出發後 110-200 分鐘 計算值與實驗值平均偏差(預測準確度實驗) ............................................................................................................................................ 72 圖 5-22: 實驗 2A-1,出發後 210-300 分鐘 計算值與實驗值平均偏差(預測準確度實驗) ............................................................................................................................................ 72 圖 5-23: 實驗 2A-1,出發後 310-400 分鐘 計算值與實驗值平均偏差(預測準確度實驗). 政 治 大 圖 5-24: 實驗 2A-2,出發後 10-100 分鐘 (搜尋法效能評估實驗) ............................... 75 立 ............................................................................................................................................ 73. 圖 5-25: 實驗 2A-2,出發後 110-200 分鐘 (搜尋法效能評估實驗) ............................. 75. ‧ 國. 學. 圖 5-26: 實驗 2A-2,出發後 210-300 分鐘 (搜尋法效能評估實驗) ............................. 76. ‧. 圖 5-27: 實驗 2A-2,出發後 310-400 分鐘 (搜尋法效能評估實驗) ............................. 76. y. Nat. 圖 5-28: 2A 各實驗之平均偏差比較 出發後 10-100 分鐘 .............................................. 81. er. io. sit. 圖 5-29: 2A 各實驗之平均偏差比較 出發後 110-200 分鐘 ............................................ 81 圖 5-30: 2A 各實驗之平均偏差比較 出發後 210-300 分鐘 ............................................ 82. al. n. v i n C h 出發後 310-400 圖 5-31: 2A 各實驗之平均偏差比較 分鐘 ............................................ 82 engchi U 圖 5-32: 實驗 2A-3-1,出發後 10-100 分鐘 (錯誤容忍度實驗,Against Normal. distribution) ........................................................................................................................ 85 圖 5-33: 實驗 2A-3-1,出發後 110-200 分鐘 (錯誤容忍度實驗,Against Normal distribution) ........................................................................................................................ 85 圖 5-34: 實驗 2A-3-1,出發後 210-300 分鐘 (錯誤容忍度實驗,Against Normal distribution) ........................................................................................................................ 86 圖 5-35: 實驗 2A-3-1,出發後 310-400 分鐘 (錯誤容忍度實驗,Against Normal distribution) ........................................................................................................................ 86 x.
(13) 圖 5-36: 實驗 2A-3-2,出發後 10-100 分鐘 (錯誤容忍度實驗,Against inaccurate Gamma distribution) ........................................................................................................................ 88 圖 5-37: 實驗 2A-3-2,出發後 110-200 分鐘 (錯誤容忍度實驗,Against inaccurate Gamma distribution) .......................................................................................................... 88 圖 5-38: 實驗 2A-3-2,出發後 210-300 分鐘 (錯誤容忍度實驗,Against inaccurate Gamma distribution) .......................................................................................................... 89 圖 5-39: 實驗 2A-3-2,出發後 310-400 分鐘 (錯誤容忍度實驗,Against inaccurate. 政 治 大 圖 5-40: 實驗 2A,出發後 10-100 分鐘 (錯誤容忍度實驗,Search Ratio) .................. 91 立 Gamma distribution) .......................................................................................................... 89. 圖 5-41: 實驗 2A,出發後 110-200 分鐘 (錯誤容忍度實驗,Search Ratio) ................ 91. ‧ 國. 學. 圖 5-42: 實驗 2A,出發後 210-300 分鐘 (錯誤容忍度實驗,Search Ratio) ................ 92. ‧. 圖 5-43: 實驗 2A,出發後 310-400 分鐘 (錯誤容忍度實驗,Search Ratio) ................ 92. y. Nat. 圖 5-44: 實驗 2B-1,出發後 10-100 分鐘 (預測準確度實驗) ....................................... 95. er. io. sit. 圖 5-45: 實驗 2B-1,出發後 110-200 分鐘 (預測準確度實驗)...................................... 96 圖 5-46: 實驗 2B-1,出發後 210-300 分鐘 (預測準確度實驗) ..................................... 96. al. n. v i n C h 出發後 10-100U分鐘 ............................................ 101 圖 5-47: 2B 各實驗之平均偏差比較 engchi 圖 5-48: 2B 各實驗之平均偏差比較 出發後 110-200 分鐘........................................... 102 圖 5-49: 2B 各實驗之平均偏差比較 出發後 210-300 分鐘 .......................................... 102 圖 5-50: 實驗 2B,出發後 10-100 分鐘 (錯誤容忍度實驗) ......................................... 105 圖 5-51: 實驗 2B,出發後 110-200 分鐘 (錯誤容忍度實驗) ....................................... 105 圖 5-52: 實驗 2B,出發後 210-300 分鐘 (錯誤容忍度實驗) ....................................... 106. xi.
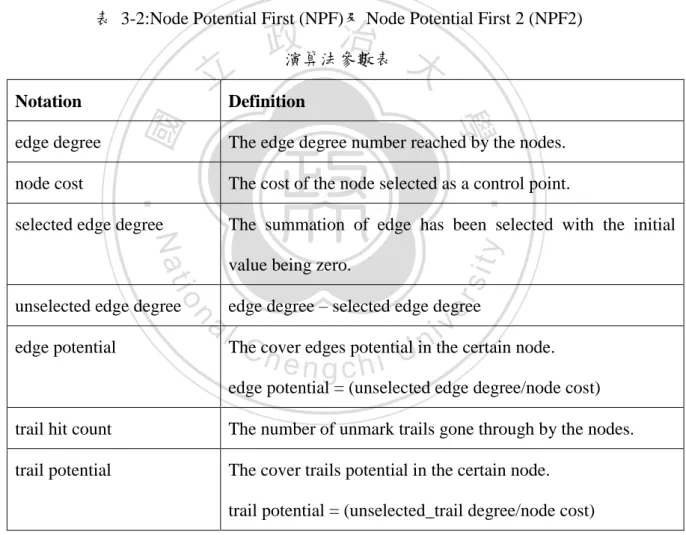
(14) 表目錄 表 3-1︰控制點選擇問題 (CPSP) 的評估指標................................................................ 30 表 3-2:Node Potential First (NPF)及 Node Potential First 2 (NPF2) 演算法參數表 ........ 32 表 3-3: NPF、NPF2 演算法比較 ....................................................................................... 35 表 3-4︰Node Potential First U (NPF-U)及 Node Potential First U2 (NPF-U2)演算法參 數表.................................................................................................................................... 36. 政 治 大 表 3-6:NPF-PF 演算法之參數表 ........................................................................................ 38 立 表 3-5:NPF-U、NPF-U2 演算法比較 ............................................................................... 37. 表 4-1:名詞定義 .................................................................................................................. 41. ‧ 國. 學. 表 5-1︰實驗一控制點選擇問題實驗描述........................................................................ 53. ‧. 表 5-2︰實驗二機率預測搜尋法實驗描述........................................................................ 53. y. Nat. 表 5-3︰實驗 2A-1 參數 ..................................................................................................... 68. er. io. sit. 表 5-4:實驗 2A-1 預測準確度實驗 .................................................................................... 73 表 5-5︰實驗 2A-2 參數 ..................................................................................................... 74. al. n. v i n C h ............................................................................ 表 5-6 實驗 2A-2 搜尋法效能評估實驗 77 engchi U 表 5-7︰實驗 2A-3-1 參數 .................................................................................................. 78 表 5-8︰實驗 2A-3-2 參數 .................................................................................................. 78 表 5-9: 實驗 2A-3-1 預測準確度實驗 ............................................................................... 83 表 5-10:實驗 2A-3-2 預測準確度實驗 ............................................................................... 84 表 5-11: PPM-S 錯誤容忍度實驗(Against Normal distribution) ....................................... 87 表 5-12: PPM-S 錯誤容忍度實驗(Against inaccurate Gamma distribution) ..................... 90 表 5-13: PPM-S 錯誤容忍度實驗(Search Ratio) ................................................................ 93 表 5-14:實驗 2B-1 參數 ...................................................................................................... 94 xii.
(15) 表 5-15:實驗 2B-1 預測準確度實驗 .................................................................................. 97 表 5-16︰實驗 2B-2 參數.................................................................................................... 97 表 5-17 實驗 2B-2 搜尋法效能評估實驗........................................................................... 98 表 5-18:實驗 2B-3-1 參數 ................................................................................................... 99 表 5-19:實驗 2B-3-2 參數 ................................................................................................... 99 表 5-20:實驗 2B-3-1 預測準確度實驗 ............................................................................. 103 表 5-21:實驗 2B-3-2 預測準確度實驗 ............................................................................. 103. 政 治 大 表 5-23: PPM-M 錯誤容忍度實驗(Against inaccurate Gamma distribution) .................. 104 立. 表 5-22: PPM-M 錯誤容忍度實驗(Against Normal distribution) .................................... 104. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. xiii. i n U. v.
(16) 第1章 緒論 1.1 研究背景與目的. 立. 政 治 大. 旅行者時間位置的預測在許多研究領域中都是個重要的議題,例如:交通運輸、物流管. ‧ 國. 學. 理、車載網路、地理資訊系统…等。以旅行者本身的觀點來看,旅行者可依照預測的. ‧. 旅行時間評估到達目的地所需花費的時間。以管理者而言,預測目標旅行者在某個時 間點所在位置對於掌控旅行者行蹤及安全性有極大的幫助。本篇的研究背景在山區機. y. Nat. io. sit. 會網路環境上,機會網路傳遞資料遠比一般網路困難,機會網路本身的特性使得傳遞. n. al. er. 訊息的效率很低,因此我們將在機會網路上使用行動代理人來傳遞溝通,希望可利用. Ch. i n U. v. 行動代理人自主性的性質,增加訊息交換的效率。而我們要對一個行動代理人下達指. engchi. 令,無論是暫停、終止、恢復,最重要的第一件事,就是要能夠先找到這一個目標行 動代理人,因此我們提出一個預測及搜尋方法,來預測此目標節點在某個給定的時間 其所在山區路段各段機率並依機率高低依序搜尋,期望提升訊息溝通的效率或是進一 步支援緊急山難搜救。 為此,本篇論文以「山文誌登山資訊系統 (Cen Wits System) 」為背景,在登山 客追蹤與環境監控系統中,每個登山客都攜帶一個配備有 GPS 功能的小型設備,在 登山客的移動過程中,自動收集位置資訊,並使用短程無線電來和鄰近的登山客交換 彼此的移動資訊。本研究假設山區已佈建完成內部能快速交換資訊的高速網路 (稱為 1.
(17) 控制網路),並假設已導入行動代理人技術於機會網路中。行動代理人附屬於登山客所 攜帶的設備上,當兩個登山客互相接近時,行動代理人才可從其中一個設備轉移到另 一個設備,故其行動力受制於登山客的移動行為。因此,本研究提出一個預測方法, 利用機率計算的方式來預測目標代理人在山區健行路徑上各路徑之機率,接著提出一 個簡單的搜尋演算法,將搜尋代理人利用控制網路發送至預測路段中機率最高路段前 方的控制節點,再利用反向的行動節點來逐步靠近目標節點。讓行動代理人藉此控制 網路的轉送,以快速接近並搜尋到特定的行動代理人。. 1.2 機會網路. 立. 政 治 大. 機會網路 (Opportunistic Network, OppNet) [1]是由許多移動式節點 (mobile node, MN). ‧ 國. 學. 所組成,在機會網路環境中,可能因移動式節點的分佈位置不均、移動性等原因,造. ‧. 成整個網路分成幾塊互不相連的區塊。 以下為機會網路的特性。. y. Nat. . 可能不存在來源端到目的端點對點的路徑 (end-to-end path)。. . 兩端點之間連線中斷與重新連線的情況可能時常發生。. er. n. al. sit. 網路聯繫是斷斷續續的。. io. . Ch. engchi. i n U. v. 由於以上幾個特性,使得原本的資料傳輸機制,無法直接使用在機會網路中,因 此產生了一個新的訊息交換機制—store-carry-forward ,藉由這個訊息交換機制,可讓 不存在點對點路徑的兩個節點,藉由中間節點代為轉送,使訊息透過接力的方式傳送 到目的端,當沒有機會使資料往目的端發送時,中間代傳的節點會為來源端暫存這份 資料,等待適合的代傳節點出現,再將資料透過接力方式往目的端發送。機會網路的 資料傳輸沒有一個固定的路線,即使是位於不同網路區塊的節點,也有機會透過中間 節點的代傳,得以互相通訊。. 2.
(18) 在機會網路中,藉由節點本身的移動性,來讓不同的節點之間有「機會」互相接 觸,以傳送、接收或代傳資料,但也因為此特性,使得在資料傳輸的過程中,可能因 為環境因素、節點的移動性等原因,而造成移動式節點之間產生間歇性、臨機性的接 觸與連結,這將造成每一次的封包傳遞常會有延遲的狀況,所花費的傳輸時間也難以 預測,因此,機會網路是屬於耐延遲網路 (Delay Tolerant Networks, DTN) 的一種,不 適合使用在即時性需求高的服務,例如︰網路電話 (Voice over IP, VoIP)。. 1.2.1 機會網路的訊息交換機制. 治 政 運作在傳統網路下的資料交換機制,一般都假設在來源端與目的端之間存在有點對點 大 立 的路徑 (end-to-end path),然而在機會網路中,不一定存在這條點對點的路徑,因此, ‧ 國. 學. store-carry-forward 機制被提出作為機會網路上的訊息交換機制。. ‧. 利用 store-carry-forward 訊息交換機制,節點需依靠本身所具備的移動性,且節點 扮演的角色必需能隨需求適時地做切換。每個節點都身兼數職,可以承擔 host、router、. y. Nat. io. sit. 或 gateway 的任務,當它作為 host 時,具有儲存及保管資料的能力,作為 router 時,. n. al. er. 此節點便同時具有儲存、攜帶、轉送資料的能力,可以做為同一個網路區塊中其他節. Ch. i n U. v. 點的代傳節點,而作為 gateway 時,則可以視為不同網路區塊之間的代傳節點,如此. engchi. 一來,即使各節點之間處於互不相連的網路區塊,也能藉此機制順利溝通,這種以 store-carry-forward 技術來傳送資料的方式,是機會網路資料傳輸的最大特色。 機會網路可能的應用環境,可以以一個分離的無線隨意網路 (disconnected Mobile Ad Hoc Network, disconnected MANET) [2]來說明,如所示,該網路由許多移動式節點 所組成,當整個網路因節點的移動性,而被切成許多大大小小、互不相連的網路區塊 時,由於來源端和目的端之間不存在點對點的路徑,故位於不同區塊的節點是無法互 相溝通的,這樣的網路型態即被稱為分離的無線隨意網路。. 3.
(19) 立. 政 治 大. 圖 1-1: Disconnected Mobile Ad Hoc Network (Disconnected MANET). ‧ 國. 學 ‧. 在此分離的無線隨意網路中,若可以利用移動式節點的移動性及區域發送訊息 (local forwarding) 的能力,讓訊息藉由其他節點的代傳來傳送,那就可以達到資料交. n. al. er. io. sit. y. Nat. 換的目的。. Ch 1.2.2 機會網路的研究議題. engchi. i n U. v. 由於機會網路本身的特性或限制,使得在資料交換方面的研究,面臨了許多挑戰,以 下分別依照不同的網路層級來說明[3]。 1.. 網路層 機會網路上的資料交換需依靠移動式節點之間的接觸,且節點同時擁有 host 及. relay 的身份時,整個機會網路才能運作得起來。在網路層中,由於每一節點皆肩負轉 送任務,故將額外消耗儲存空間,因此,節點本身的儲存空間大小必需被列入考慮, 基於此,產生了兩種完全不同的路由設計理念,分別是 flooding-based (multiple copies) approach 及 forwarding-based (single copy) approach,分別說明如下。 4.
(20) . Flooding-based (multiple copies) approach︰ 發送端或中間節點在發出或轉送一個訊息時,會將同一個訊息的多個複 本,透過不同的路由路徑來轉送給鄰近節點,直到將訊息送達目的端為止。 由於訊息是循著許多不同路徑轉送,較有機會使用到較短的路程,可以降低 資料傳送的延遲率,並提高資料傳輸的成功率,但也會造成網路上充斥著同 一個訊息的多個複本,耗費轉送節點大量的儲存空間,且佔用較多資料傳輸 所需的網路頻寬。. . 政 治 大. Forwarding-based (single copy) approach︰. 立. 發送端或中間節點在發出或轉送一個訊息時,僅轉送到一個鄰近節點,. ‧ 國. 學. 重覆資料轉送的動作,直到將訊息送達目的端為止。這種作法可以減少儲存 空間的使用量,並避免網路上相同訊息的過度泛濫,然而,對同一個訊息而. ‧. 言,由於同時間只有一個負責保管此訊息的代傳節點,而訊息轉送路徑無法. Nat. sit. n. al. er. 傳輸層. io. 2.. y. 保證為最短路徑,故也會造成延遲時間加長及資料傳遞效率偏低的情形。. i n U. v. 在機會網路中,節點之間發生連線中斷的狀況是相當頻繁的,且點對點路徑也極. Ch. engchi. 少是存在的,故使用在傳統網路上的傳輸層協定 (例如︰TCP),由於在設計之初,都 是假設在點對點路徑已存在的環境下,因此,無法直接轉移到機會網路上使用。 3.. 包裹層 (Bundle Layer) 這一層是為了支援 store-carry-forward 資料傳輸機制而產生,主要負責資料包裹. (或稱為 bundles) 的儲存、攜帶及轉送,當只有一個目的端節點時,需提供 unicast bundle delivery 的技術,當有多個目的端節點時,則需提供 multicast、anycast delivery 的方式 來傳輸資料。 4.. 應用層 在機會網路中,由於無法預期節點之間的連線何時會被中斷,故不容易妥善地利 5.
(21) 用節點接觸時所產生的通訊機會,因此,將傳統網路上的應用直接移植到機會網路中, 仍頗具挑戰性。 即使是本質上具有耐延遲特性的網路應用,在傾向於分離的網路環境中,整體的 效能也會顯著地下降,舉電子郵件這個高度耐延遲的網路應用來說,雖然使用者通常 習慣為了一封回覆去等數小時或數天的時間,然而,由於現有支援電子郵件應用的傳 輸層協定 (例如︰TCP),在設計之初,並沒有被考慮使用在機會網路這樣的環境中, 因此,在機會網路中支援電子郵件的應用,仍是相當具有挑戰性的。. 政 治 大. 即使如此,在機會網路中支援電子郵件的應用,仍是相對簡單的,因為它耐延遲. 立. 的特性,可以忍受機會網路的高延遲傳輸特性,然而,支援 Web 應用則要更複雜得多,. ‧ 國. 學. 因為高互動性的應用協定 (例如︰HTTP),不能忍受高延遲。. 除了以上所探討的幾點外,另有兩個在機會網路中不可忽略的特殊挑戰。 Contact – 應該要考慮當兩個移動式節點互相接觸時,可以成功傳送的資料量. sit. y. Nat. 多寡。. n. al. er. Storage constraint – 應該要考慮在移動式節點中,是否有足夠的儲存空間,用. io. . ‧. . 來暫存準備代傳的資料。. Ch. engchi. i n U. v. 在機會網路中,即使存在了 store-carry-forward 訊息交換機制讓節點之間能順利交 換資料,然而,由於與生俱來的網路連線特性,使得資訊交換的傳輸率及延遲時間難 以估計,並且由於每個節點內部儲存容量的限制,故也可能造成資料未成功送出前就 已被丟掉,因此,對保證資料成功交換的挑戰性極大。. 1.2.3 機會網路的應用 1.. 登山服務與山難搜救 由中研院、台灣大學與美國科羅拉多大學合作研發出的「山文誌登山資訊系統 6.
(22) (CenWits System)」[3-5],主要目的為收集遊客行走路徑與山區的氣候資訊,並將所收 集到的資料做進一步的分析、處理與應用,現已實際應用於玉山國家公園,稱為玉山 網 (YushanNet) [6, 7]。 將「山文誌登山資訊系統」應用於山難搜救時,可先經由控制中心所搜集到的資 訊,來定位待援登山客的行蹤,並將搜救範圍縮小至最有效的區域,以協助搜救人員 抓緊黃金救援時間,提升救援速度,並節省搜尋救援工作所耗費的人力與物力成本。 而關於登山服務方面,也可讓國家公園管理處得知遊客活動較頻繁的區域,作為. 政 治 大. 日後增修遊客服務設施的參考,另外,登山客的家屬也可以透過網際網路,來掌握登. 立. 山客目前的位置與行進狀況。. ‧ 國. 學. 2.. 野生動物追蹤. 由於野生動物沒有固定路徑,故只能在特定地點找到牠們,例如︰水源、巢穴等,. ‧. 在這些野生動物的身上裝置省電、無須額外設定的 GPS 收發器後,研究人員便可藉由. Nat. sit. y. 裝置之間資料交換的所得,來分析出野生動物的活動範圍,以及不同物種間的互動及. 外太空傳輸. al. n. 3.. er. io. 遷徙等關係,相關的研究如美國普林斯頓大學的 ZebraNet Project[8,9]。. Ch. engchi. i n U. v. 美國國家航空暨太空總署 (NASA) 在 2011 年啟用的 InterPlanetary Interent Project 就是這個應用的實際案例[10,11]。 網際網路 (Internet) 使用 TCP/IP 協定來保證網路中資料傳輸的可靠度,在這個協 定中,傳輸資料的來源端和目的端必須在傳輸的過程中保持連線的建立,然而,這在 外太空傳輸的過程中是很難做到的,因為距離太遠,再加上行星的運行及衛星的漂浮 等情況,故在傳輸過程中,連線的間歇性中斷情形是很普遍的,因此,在這樣的環境 下,就相當適合使用機會網路的傳輸特性,當連線中斷時,可以繼續暫存資料,直到 下一個可能的節點再傳輸,並且,容許傳輸時間的長時間延遲及高資料錯誤率。 4.. 開發中國家或偏遠地區的網路傳輸 7.
(23) 以往許多技術都是為了已開發國家而研究、發展,然而,這些技術可能無法使用 在開發中國家或偏遠地區,因為這些地區的基礎建設可能並不完善,甚至該地的人們 可能也沒有一定程度的知識水平,在這樣的應用環境下,成本、部署 (deployment)、 功耗等問題就需要被考慮,例如︰美國柏克萊大學所研究的 Tier Project[12],主要的 研究目標就是要解決這些開發中國家或偏遠地區的網路通信問題。 5.. 戰區、災區的通訊網路 以往 Mobile Ad Hoc Network (MANET) 的研究應用,常被設定在無建置基礎建設. 政 治 大. (infrastructure),或基礎建設已遭受損壞的戰區、災區環境中,然而,在這樣的環境中,. 立. 由移動式節點所組成的許多互不相連的網路區塊,可能會因為移動式節點的移動性與. ‧ 國. 學. 無線傳輸範圍的限制,而造成不同的網路區塊之間無法互相通訊的情況,此時,若能 利用節點的移動性,以及機會網路最重要的傳輸機制—store-carry-forward 訊息交換機. ‧. 制,就能適用於戰區、災區環境[13,14 ]。. y. Nat. io. sit. 1.3 行動代理人. n. al. er. 所謂的行動代理人 (mobile agent) 可以視為一支可在異質系統之間移動、執行,並具. Ch. i n U. v. 有特定功能的小型程式。當原本的節點 (home node) 送出行動代理人時,代理人就像. engchi. 使用者的分身一樣,從原本的節點中分離出來,自主地決定要訪問的節點,無須和 home node 持續保持連絡,它將代表使用者在網路中的節點進行多次跳躍 (multiple hops) 移 動與執行任務,最後將使用者所交待的任務結果回傳到 home node。 行動代理人其實也是代理人技術 (agent technology) 的一種。其基本原理就是當 行動代理人 (mobile agent) 接收到終端使用者的請求命令時,便即時地處理使用者所 交付的任務,並依實際的情況,可從網路一端的主機移動至其他另一端的主機去處理, 最後再將結果回傳給使用者。實際上,在網路上移動的行動代理人,其狀態不僅包含 本身的程式碼和任務處理資料,還包括了 thread 的狀態及其擁有者的權限。 8.
(24) 另外,在終端間移動中的行動代理人,具備了自主性與機動性,即使是在無法和 使用者相互通信的環境中,也能將移動前的程式憑藉自己本身的知識,或所收集到的 情報,自主地加以分析判斷,並繼續執行處理。. 1.3.1 行動代理人的特點 代理人通常扮演一個使用者或另一個代理人的角色,並負責和其他代理人之間的溝通 (communication) 與合作 (collaboration/cooperation)。以下為「行動代理人」所必備的 特質[15]︰. . 學. ‧ 國. . 治 政 自適應性 (Adaptivity)︰代理人具備學習能力並能隨經驗增長 大 立 自主性 (Autonomy)︰代理人必須具有主動性,在朝達成目標的方向下,有自 主能力採取啟發性之行為. 協作行為 (Collaborative behavior)︰代理人具備可以與其它代理人合作並一. ‧. . 起達成目標之能力與行為. y. Nat. io. sit. 推論能力 (Inferential capability)︰代理人具備有針對抽象定義之目標採取行 動之能力,換句話說就是具備推論能力. al. n. . Ch. er. . i n U. v. 知識水平的通訊能力 (Knowledge-level communication ability)︰代理人在與. engchi. 其它代理人溝通時,具備使用人性化語言與溝通方式之能力 . 個性化 (Personality)︰代理人可以具有個性化之特質,即具有可以扮演出逼 真行為之能力. . 反應性 (Reactivity)︰代理人具備選擇性感測與反應之能力. . 持續性 (Temporal continuity)︰代理人具備保持身份扮演一致性之特質,並能 夠長時間的維持. . 移動性 (Mobility):代理人具備機動引導之能力,可以從一個主機移至另一 個。 9.
(25) 1.3.2 行動代理人的優點 使用行動代理人技術的好處,包括克服客戶端計算機能力的限制、客制化、與生俱來 的存活能力、作為離線用戶的代表,和易於擴展。以下將逐一說明[16]。 . 克 服 客 戶 端 計 算 機 能 力 的 限 制 (Overcoming the limitations of a client computer)︰舉例來說,先把代理人送到遠端主機的資料庫,並根據自定義的 演算法進行搜尋後,再將資料回傳客戶端,比直接存取遠端資料庫更有效率, 並能克服客戶端本身的通訊延遲、總處理能力、儲存容量大小、計算能力等. 治 政 限制,此外,客戶端也可能沒有足夠的儲存空間來暫存大量資料,或者可能 大 立 沒有足夠的網路頻寬和計算能力。 ‧ 國. 學. . 客制化 (customization)︰在 client/server 架構中,是很難適應快速變化的,相. ‧. 反的,行動代理人則可以很容易地依照使用者需求客制化,再將此新的需求 送到伺服器端執行。其中,伺服器端的代理人系統代表一種解譯器. y. Nat. io. 與生俱來的存活能力 (inherent survivability)︰因為行動代理人能攜帶著本身. n. al. er. . sit. (interpreter),負責接受並執行收到的代理人。. Ch. i n U. v. 的程式碼和狀態移動,故相較於 client/server 架構有更高的存活率,當一個節. engchi. 點或網路的一部分發生問題時,行動代理人可以離開這個節點,到其他地方 再繼續執行原有的任務,雖然有其他方式可以提高 client/server 架構的執行效 率,但仍無法適用於大規模的系統架構中,反之,行動代理人原本就是被設 計用於 Web 上。 . 作為離線用戶的代表 (representation of a disconnected user)︰現今很多使用者 都具有移動性,時常在辦公室開始一個工作,而後在另一個地方利用筆記型 電腦來繼續之前的工作,並希望在使用者離線的期間仍能繼續執行工作,故 可利用送出行動代理人,讓使用者離線後,仍由代理人繼續處理原來的工作, 10.
(26) 而後,當使用者再度上線時,再將代理人拉回。 . 易於擴展 (ease of development)︰當大量的資料被儲存在分散的伺服器中,遠 端存取所需的資料並非一個可行的選擇,甚至基於安全因素,本地資料可能 不提供遠端存取,因此,可利用管線技術 (pipelining) 讓不同類型的代理人 先後拜訪這些伺服器,並執行必要的動作。. 1.3.3 行動代理人的應用 行動代理人在接收使用者的任務後,可以提供資訊處理之服務,包含資料的收集、檢. 治 政 索、過濾、交換等功能,在[17]中已提出幾個原因來說明行動代理人在許多應用中, 大 立 是一個有效率的選擇,其優點有改善 client/server 架構中的頻寬限制、網路延遲,以及 ‧ 國. 學. 減少網路負載、網路斷線的弱點等。以下就現存的行動代理人的應用逐一說明. 1.. ‧. [17-19 ]。. 電子商務 (Electronic commerce)︰使用者可告知行動代理人欲購買的商品名. y. Nat. n. al. er. io. 下訂單等動作。. sit. 稱、價格、品牌等資訊,並委託其在虛擬商店中,代使用者做搜尋、過濾、. 2.. Ch. 軟體發行 (Software distribution)︰. engchi. i n U. v. 當機器的數量不斷地增加,在其上安裝和維護軟體變得更困難,可利用 行動代理人依照軟體包的軟件清單,並檢查本機安裝版本,來自定義安裝, 以自動完成此動作。 3.. 資訊檢索 (Information retrieval)︰ 使用者僅需輸入欲獲取資料的關鍵字,便可藉由行動代理人的移動,來 檢索分散在網路上各主機中資料庫的資料,行動代理人便會在目的端主機資 料庫,過濾出所需的資料,並依照檢索結果來選擇移到其他主機繼續處理, 或回傳結果給使用者。 11.
(27) 4.. 系統管理 (System administration)︰ 行動代理人可以獨立地在大型系統中移動,並執行定期性的管理,例如︰ 備份或其他系統相關的操作,並可在問題發生時,於人為操作的干預前做初 步的問題評估,以幫助系統管理員釐清問題發生的原因及後果,此外,也可 用於自動執行常規任務,及定期檢查系統和網路。. 5.. 網路管理 (Network management)︰ 網路本質上是分散式的,且提供一個適合部署代理人的環境,例如︰在. 政 治 大. 主動式網路 (Active Network) 中,可透過行動代理人來移動、傳送通信協定. 立. 的處理程式,並安裝在原本沒有此通信協定的主機上,使其主機得以運作,. ‧ 國. 學. 即無須事先在各主機上做各通信協定標準化的動作。 6.. 網路安全 (Network security)︰. ‧. 將非公開機密化的資訊安置於行動代理人,而後予以加密,並隨著行動. Nat. sit. y. 代理人在網路中移動,可免於在傳送中遭受竊取、竄改的顧慮,特別是能將. n. al. er. io. 解密程式也置於代理人中,因此,在目的地端主機無須事先準備解密程式,. i n U. v. 則我們可以採用各種雙方已協調好的任意加密形式來作加密動作。. Ch. engchi. 近年來,行動通信和無線網路技術的大幅躍進,使得行動代理人的利用不僅限於 遠端資料查詢,還包括了分散式即時系統 (Real Time System) 和工作流程系統 (workflow system) 等環境,促成了其應用的多樣化。. 1.4 運用行動代理人於機會網路 由於在機會網路上,訊息在傳遞的過程中,相較於傳統網路有更多的不確定性、不可 預測性,故訊息的傳遞速度較慢,在這樣的環境中,若採用傳統的集中控制模式並不 恰當,因此,我們希望將行動代理人技術導入機會網路中,提升機會網路的功能,以 期產生更多可行的應用。例如︰利用行動代理人去尋找其他行動代理人,遠比由中控 12.
(28) 中心去找行動代理人要來得方便、快速,也無須耗費許多無謂的資訊來回時間。 我們以「山文誌登山資訊系統」為例,在此系統上導入行動代理人技術,可擴大 此系統原有的功能,以下列舉幾個可能的應用情境︰ . 變更既有登山行程︰不同日期出發的登山客,能在發生臨時事件而改變行程 時,通知對方新的集合時間及地點。例如︰原本約定在兩天後於某定點集合, 卻臨時得知有颱風警報或山中起濃霧,此時便可利用行動代理人通知所有人, 取消原本的計畫,並馬上趕到另一個地點集合。. . 政 治 大. 互動通訊︰當某個登山客發現隊友脫隊時,可以先傳送訊息給走失的隊友,. 立. 並提供初步的協助,或約定下一個集合地點。. ‧ 國. 學. 1.4.1 機會網路上的行動代理人運作. . ‧. 行動代理人於機會網路中的功能與特性如下。. 存在於移動式節點上,並可進行決策運算。例如︰資料匯整, 資料搜尋, 變換. y. Nat. io. sit. 路徑等。. 可以決定何時轉移到其他特定的移動式節點。. . 可以決定何時啟動、暫停、恢復自己的工作。. . 當轉移到其他的移動式節點時,可被視為一個在節點之間交換的訊息。. n. al. er. . Ch. engchi. i n U. v. 1.4.2 行動代理人平台的功能需求 雖然將行動代理人技術應用於機會網路中,將帶來許多彈性與優勢,但不可否認地, 由於行動代理人的本質仍是一支程式,而只要是軟體就可能有程式撰寫上的缺陷存在, 導致破壞系統正常運作,因此,當某些代理人發生執行期的錯誤,而造成系統資源的 損耗,影響系統之運作,或其他危及系統的情況 (例如︰系統當機) 時,行動代理人 平台必須能在不危及系統安全及正常運作的前提下,去解決這些問題。 行動代理人平台,具有創建、解譯、執行、複製、轉移、終止行動代理人的能力, 13.
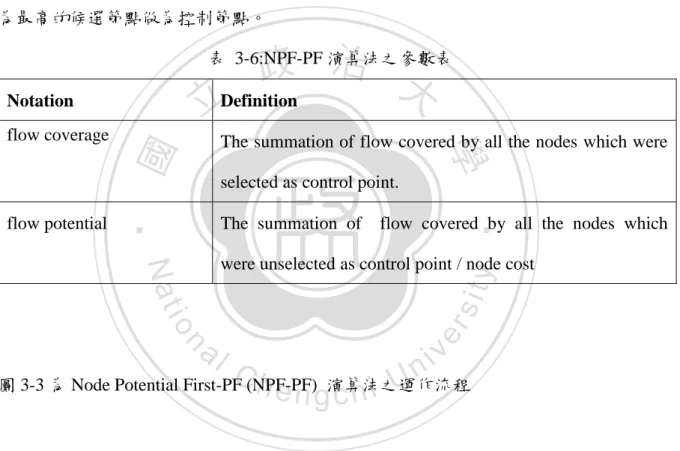
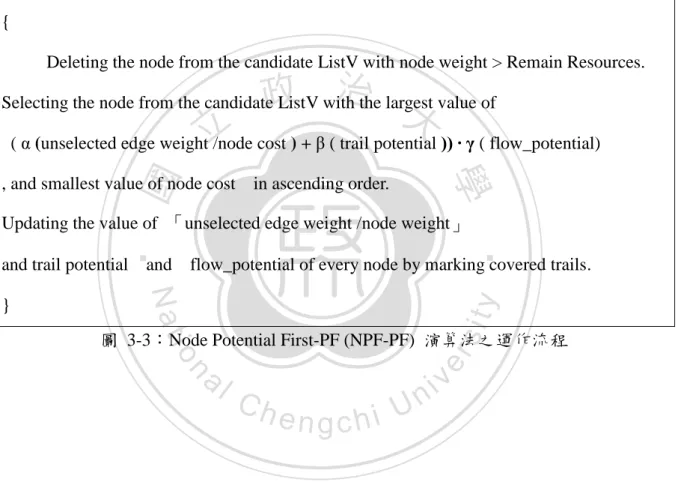
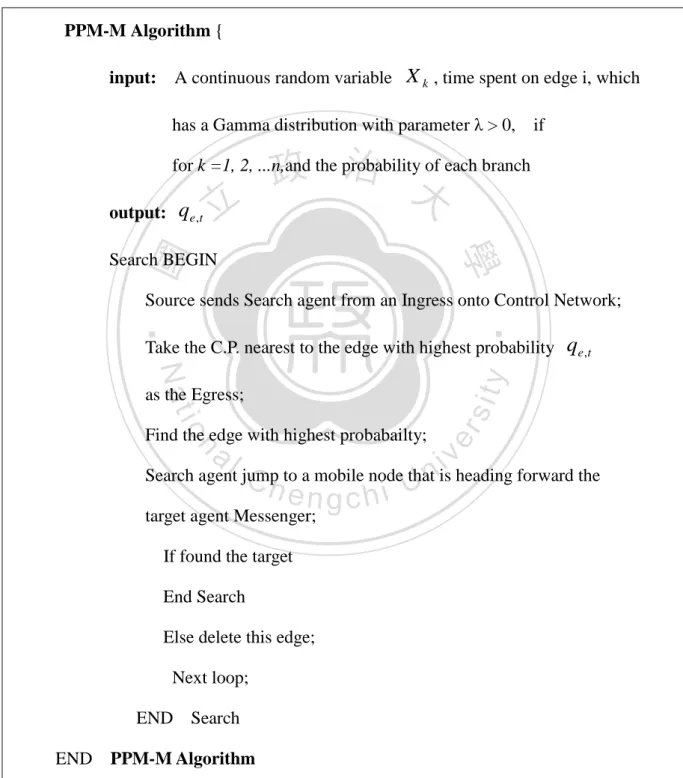
(29) 且必須提供代理人的控制機制,來讓其擁有者能監控代理人的執行狀態、增加新的任 務或撤回舊任務等,同時,行動代理人之間也必須能在任務中進行溝通合作,此外, 代理人的控制機制也作為處理代理人發生錯誤,或在其他例外處理時使用。 要實現行動代理人的控制機制,首先,必須存在代理人管理員 (Agent administrator) 元件,此元件具備代理人行為之控制權限,可提供代理人的狀態查詢及其他控制代理 人行為之指令。 以上所提到的代理人控制功能,至少需具備以下幾項︰ . 政 治 大. Status inquiry︰代理人狀態查詢功能,用來查詢代理人唯一的識別碼、來源. 立. 及目的地節點之資訊、被分派執行的命令名稱、優先權值、佔用的系統資源. ‧ 國. 學. 多寡、已耗費的執行時間與完成度,及目前的執行狀態、中間結果等資訊。 Stop︰中止當前任務。. . Suspend︰暫停當前執行的任務。. . Resume︰恢復之前所執行的任務。. . Update assignment︰分派其他新任務。. . Change its itinerary︰改變代理人原來的移動路線規劃。. . Kill︰強制刪除當前代理人及其任務。. ‧. . n. engchi. sit er. io. Ch. y. Nat. al. i n U. v. 以上所列出的幾點控制機制,最大的困難與前提,即是在於「如何找到所欲控制 的行動代理人」,只有先找到某個特定的行動代理人,方能對其進行控制。. 1.5 論文組織架構 本篇論文章節架構如下:第一章說明本研究動機與目的,並介紹背景知識及架構。第 二章討論搜尋行動代理人之研究及所面臨的挑戰,介紹相關研究所提出的控制網路概 念及其基於「山文誌登山資訊系統」為背景的控制網路之建置模型。第三章,本文加 入第四個控制網路的模型,並針對控制網路建置模型相關研究所提出的啟發式演算法 14.
(30) 另提出改進之解決方案。在第四章提出一個以計算機率的預測方式來搜尋行動代理人 位置的演算法。第五章針對所提出控制網路建置的模型解決方案之演算法及機率預測, 兩者各別進行效能評估,最後,在第六章總結本論文,並提出未來可能的研究方向。. 立. 政 治 大. ‧. ‧ 國. 學. n. er. io. sit. y. Nat. al. Ch. engchi. 15. i n U. v.
(31) 第2章 相關研究與文獻探討. 政 治 大 論文研究之基礎,並以其作為依據,提出本論文策略與架構,並作進一步之分析與比 立 文獻探討的部份,依據研究題目之相關領域作一深入之瞭解與學習,以作為我們本身. ‧ 國. 學. 較。主要分為四個主題做介紹。2.1 小節將介紹機會網路上搜尋行動代理人之挑戰;2.2 小節介紹「山文誌登山資訊系統」 ;2.3 小節為控制網路之相關研究;2.4 則為控制網路. ‧. 上控制節點選擇問題之相關研究。. sit. y. Nat. 2.1 機會網路上搜尋行動代理人之挑戰. al. n. . er. io. 在機會網路上,欲搜尋行動代理人主要有以下幾點困難。. i n U. v. 在機會網路中,行動代理人存在於移動式節點上,但由於移動式節點具有「移. Ch. engchi. 動性」的特質,故即使知道欲搜尋的行動代理人位於哪一個移動式節點,也 難以預測此移動式節點目前的位置。 . 由於機會網路本身長延遲的特性,可能導致行動代理人的位置更新速度慢, 故搜尋代理人所掌握的被搜尋代理人的位置資料可能與實際位置相差甚遠。. 2.2 「山文誌登山資訊系統」簡介 中央研究院週報[20],指出臺灣雖四面環海,卻是全球高山分佈密度最高的島嶼之一, 這也使得登山成為國人熱門的休閒活動。然而,臺灣山區氣象多變,加上地勢複雜, 登山意外時有所聞,如何保障登山客生命財產之安全,已成為重要的討論議題。根據 16.
(32) 內政部消防署所公告的一項委託研究報告指出,登山意外可以區分為十種類型,其中 迷途佔全部山難發生事件的 34%、墜崖佔 32%,其中又以迷途事件發生在積雪時期, 其死亡比例竟高達 86%,由此可知當類似事件不幸發生之時,如何能在黃金救援時間 內,迅速界定山難發生的地點,並成功營救受困的山友,已成為一項十分重要,且性 命相關的課題。 「山文誌登山資訊系統 (CenWits System)」[4,7,21]為一個山區遊客追蹤與環境監 控系統,主要目標為收集遊客行走路徑與山區的氣候資訊,再將所收集到的資料做進. 政 治 大. 一步的分析、處理與應用,故可追蹤遊客在國家公園內之分佈狀況,及了解國家公園. 立. 內之環境變化。此系統由中研院、台灣大學與美國科羅拉多大學所合作研發,目前已. ‧ 國. 學. 被建置於玉山國家公園,使用於遊客的登山活動中,相關的應用有登山服務、山難搜 救等。. ‧. 「山文誌登山資訊系統」除了提供玉山國家公園管理處了解遊客在國家公園內之. Nat. sit. y. 活動區域,以作為增修各項遊客服務設施之參考外,更可在不幸發生失蹤山難事件時,. n. al. er. io. 快速地調閱出「失蹤者的最後出現時間、地點」 ,有效地為相關救援單位縮小搜救範圍,. i n U. v. 避免被口耳相傳的模糊資訊所誤導,以提升在七十二小時黃金救援時間內,救援成功. Ch. engchi. 的機率,加強保障遊客之生命安全,並節省大範圍搜尋救援工作所耗費之人力、物力 成本。 在國家公園內,各地區地形的差異很大,故無線電訊號的傳送會受到環境狀況與 遮蔽物的影響,而影響無線通訊的能力。這是因為電磁波傳播所經過的路徑,可能被 許多不同的地形或障礙物所影響 (None Line of Sight, NLOS),而不再只是很簡單的直 線傳播 (Line of Sight, LOS),無線訊號可能會經過建築物、山丘、或樹葉的反射,而 產生多重路徑效應,造成訊號放大或衰減。因此,將使得國家公園內的許多地區都無 法接收到無線網路的訊號,若要達到每個地點都能收到無線網路的訊號,將會大幅提 升建造成本,困難度也會超乎想像。 17.
(33) 此外,山區的人口少、自然景觀珍貴,建置過多基地台除了浪費成本,也嚴重破 壞自然景觀與生態,故在這種環境下,傳統行動電話系統的覆蓋率通常不高,使得傳 統行動電話系統在山區並不可靠,故可進而假設大多數登山客並無行動電話可用。 又因為目前的網路存在一個很大的缺點,即通信端與接訊端必須要在連線狀態才 能傳遞資料,如此當遊客在通訊的死角則無法被追蹤到,為了解決此問題, 「山文誌登 山資訊系統」使用最新的無線微型收發器,搭配全球衛星定位系統,並藉由機會網路 這種「耐延遲網路」技術,讓每位遊客彼此於山徑中相遇時,能彼此交換其所攜行的. 政 治 大. 路徑與位置等資訊,最後利用架設於各山頭的無線網路中繼站,來收集、儲存遊客的. 立. 行走路徑等資料,並傳回控制中心,使控制中心能掌握遊客的動向。. ‧ 國. 學. 「山文誌登山資訊系統」的運作流程如下︰ . 每個登山客攜帶一個約 70 克重、火柴盒般大小的無線微型收發器 (內含 CPU、. ‧. 記憶體、天線,可執行使用者指定的程式),並搭配全球衛星定位系統 (GPS)。. Nat. y. 每個無線微型收發器會自動記錄各別登山客的移動路徑,換句話說,無線微. sit. . . al. n. 體中。. er. io. 型收發器會定時由 GPS 感測器取得登山客的位置,並暫存在模組的快閃記憶. Ch. engchi. i n U. v. 當登山客在山徑中相遇時,彼此的收發器便會自動記錄相遇的時間及經緯度, 並經由 Zigbee 短距無線接取技術,來互相交換對方收發器中所儲存的路徑與 位置資訊。. . 而當登山客行經預先架設於各山頭登山口、涼亭等處的無線網路中繼站 (基 地台) 時,所有儲存在無線微型收發器中的資料 (包含自己的路徑紀錄,及 所有曾相遇過的登山客所攜之收發器中的紀錄),就會自動藉由基地台來傳回 到系統內部的控制中心。. 在以上的運作流程中,由於考慮到登山客往往是一天或數天的行程,以及山徑並 不如平面道路寬敞,又遊客在山徑中相遇的時間是相當短的,因此,基於無線微型收 18.
(34) 發器的電池耗電量、傳輸距離的限制,以及 Zigbee 基地台數量有限等考量,目前在此 系統使用 Zigbee 短距離無線傳輸技術,並結合接力傳送的方式,來達到訊息傳遞的目 的。此外,由於是使用 Zigbee 短波通訊協定的公共頻道,來傳輸登山客的軌跡資料, 故相較於利用現有的衛星天線、3G,其通訊費用是完全免費的。而雖然 Zigbee 傳輸距 離短,但在正式通訊前建立連線的速度比使用藍芽技術快,也較使用 IEEE 802.11 無 線通訊協定省電,故更適合使用在這種情境中。 在此系統中,基地台的主要功能是接收無線微型收發器中的登山客 GPS 資料,再. 政 治 大. 透過 3G 網路上傳到系統控制中心。此處的基地台可分為簡易型與太陽能型兩種,簡. 立. 易型是架設在電源供應充足的管理站或是排雲山莊,太陽能型則是利用太陽能板與充. ‧ 國. 學. 電電池,架設在步道旁的涼亭或其他沒有電源供應的地區。此外,基地台也會收集風 速、雨量、風向等氣象資料,並利用網路攝影機來做生態的觀測。. ‧. 此系統目前所使用的最新無線微型收發器,除了體積小、重量輕 (約 70 克) 以外,. Nat. sit. y. 也具有防水、防摔、耐熱等特點,以及緊急呼救的功能,實際使用時,登山客只要在. n. al. er. io. 出發前充飽收發器的電力,在登山口啟動收發器,夜宿時關閉,不需要使用者手動操. i n U. v. 作,無線微型收發器就可以自動提供登山客的路徑資訊給系統控制中心。. Ch. engchi. 圖 2-1:山文誌登山系統-登山客黑盒子. 19.
(35) 立. 政 治 大. ‧ 國. 學. 圖 2-2:山文誌登山系統-基地台(簡易型與太陽能型). ‧ y. Nat. io. sit. 2.3 機會網路上使用控制網路搜尋行動代理人. n. al. er. 在機會網路上的行動代理人之搜尋,存在著極大的挑戰性。在 Placement of Control. Ch. i n U. v. Network for Mobile Agents over Opportunistic Networks [22 ],提出以「山文誌登山資訊. engchi. 系統」應用情境為例,已知每個登山客都會攜帶一個配備有 GPS 功能的小型設備,簡 稱為「行動節點 (mobile node, MN)」,此行動節點會在登山客的移動過程中,自動收 集位置資訊,並使用短程無線電來和鄰近的登山客交換彼此的移動資訊。 然而,由於行動代理人是附屬於登山客所攜帶的行動節點上,故當兩個行動節點 (登山客) 互相接近時,行動代理人才可以從其中一個行動節點轉移到另一個行動節點, 其行動力受制於登山客的移動行為,由於登山客行走速率差異不大、所在位置分佈不 均,故行動代理人的轉移將極為緩慢且需仰賴不確定的碰面機會,使得行動代理人之 搜尋效率極低。如圖 2-3 所示,若不存在控制網路 (Control Network) 的情況下,若 20.
(36) 目的端實際上比來源端提早一天出發,不管怎麼走,走在後面的來源端,都很難讓行 動代理人經由中間節點的跳接來到達目的端。. Hard to meet DEST.. 立. 政 治 大. ‧ 國. 學. SOURCE. DEST.. ‧. 圖 2-3:在機會網路上搜尋行動代理人 (以「山文誌登山資訊系統」應用情境為例). sit. y. Nat. 2.3.1 控制網路概念. io. er. 為解決上述在機會網路環境上搜尋行動代理人的困難,[22]提出一個高速控制網路的. al. 概念,來輔助搜尋代理人的移動,以提高行動代理人的搜尋效率。. n. v i n C h(例如︰Internet),可利用此網路 假設在山區存在有固定網路 (在可收到 3G、4G engchi U. 等系統的信號之處,亦可用 3G、4G 等系統連網) 建立控制點 (Control Point, CP),形 成控制網路 (Control Network),讓行動代理人在控制點之間快速移動到所欲搜尋的代 理人的前方控制點上,再跳至反向登山客所攜帶的裝置 (行動節點) 上,隨著反向登 山客的行進,與迎面而來的登山客所攜帶的行動代理人互相溝通,進行搜尋任務。 如圖 2-4 所示,假設目的端比來源端提早一天出發,故走在後面的來源端,極難 讓行動代理人經由中間其他行動節點的跳接,來到達目的端。因此,需透過控制網路 的輔助,先將來源端送出的搜尋代理人傳送到其最近的控制點,再利用控制網路的快 速轉送,將行動代理人傳送到「最接近目的端,且位於目的端未來可能會經過的移動 21.
(37) 路線上」的控制點,以上動作是藉由搜尋代理人在控制網路內部的移動,來加速行動 代理人之搜尋速度。. Control Point (CP). 政 治 大. By walk. 學. ‧ 國. 立. Egress. SOURCE. DEST.. ‧. 圖 2-4︰使用控制網路來輔助行動代理人的搜尋. y. Nat. io. sit. 若此時搜尋代理人已距離目的端夠近,則直接由控制點傳送到目的端,否則,將. n. al. er. 經由其他與目的端反方向之行動節點的跳接,來逐漸靠近目的端。由於上述的行動節. Ch. i n U. v. 點指的就是由登山客所攜帶的裝置,故事實上是透過登山客的移動,來轉送搜尋代理. engchi. 人,因此,不但轉送速度非常慢,且用來轉送的行動節點必須與目的端的前進方向相 反才行。. 2.3.2 利用控制網路的搜尋策略 當有了控制網路後,可以修改現有的行動代理人之搜尋機制,來符合機會網路上的需 要。 修改 Basic Binary Search (BBS) Algorithm 為例,運作流程如下。 1.. 先利用現有的搜尋演算法,找到最接近行動代理人的控制點。例如︰先將控 22.
(38) 制點依照行動代理人的移動路徑方向排列,再利用 Basic Binary Search (BBS) Algorithm,從中間的控制點開始找,若發現行動代理人已在先前經過此控制 點,則往後找,否則往前找。 2.. 找到最接近行動代理人的控制點後,將用來搜尋用的行動代理人,送到行經 此控制點的反向行動節點上,再由這些行動節點逐步接近欲搜尋的行動代理 人。. 可使用 Basic Binary Search (BBS)Algorithm 搜尋方式作為搜尋的策略,而在下一. 政 治 大. 章本論文將針對搜尋演算法另提出一種利用機率預測的搜尋演算法,預測目標代理人. 立. 所在之位置,並利用控制網路將搜尋代理人送至距離目標代理人最近即將走訪的控制. ‧ 國. 學. 節點上,以減少搜尋目標代理人所花費的時間。因一段健行路徑健行者所需的健行時 間,可能是半小時到數小時不等,故若預測目標代理人所在位置準確,對於改善整體. ‧. 搜尋目標代理人所花費的時間大有助益,則在行動節點訊息交換或是緊急就難搜救上. a. er. io. sit. y. Nat. 可提升其效益。. n. v l 2.4 控制網路上控制節點選擇問題之相關研究 ni 2.4.1 控制網路的建置. Ch. engchi U. 在[22]中,提出控制網路的建置模型,並沒有一定的標準,在不同的環境下,所適合 的控制網路皆不盡相同,如要全盤考慮,其面向與範園將非常龐大與複雜,故僅以「山 文誌登山資訊系統」為例,來設計適用於山區環境與登山情境的控制網路,本文也依 照相同假設,設計搜尋方法。. 23.
(39) 2.4.2 環境假設 以「山文誌登山資訊系統」為背景,可假設原本在山上就已存在網路,只是登山客在 野外活動中不會、也不能去用到這個網路。因此,假設服務範圍內已存在有線或無線 封包網路 (例如︰Internet),是相當合理的。 此外,基於此研究背景的登山應用,也作以下幾點環境假設。 1.. 登山客遵循某些健行路徑在移動。. 2.. 人 (行動節點) 的移動速率差異不大。. 學. ‧ 國. 3.. 治 政 原則上候選控制點是位於健行路徑的交界處或端點,但若候選控制點之 大 立 間的健行路徑仍太長,也可在路徑中間另加候選控制點。 ‧. 2.4.3 設計考量與目標. sit. y. Nat. 為了建置成本的考量及避免自然景觀的破壞,在控制網路的建置上,必須有效地. io. al. er. 限制控制點的數量。以下為[22]所提出的控制點選擇問題 (Control Point Selection. v. n. Problem, CPSP),將考慮如何在有限的預算資源下,挑選適當的候選控制點,來組成 最佳的控制網路。. Ch. engchi. i n U. 這些模型的目標與限制條件都遵循以下幾個原則︰ 1.. 限制︰整體的建置花費不得超過可用資源之上限。. 2.. 目標︰ . 盡可能服務到最多的行動代理人或行動節點。. . 能快速地找到任一個行動代理人或行動節點。. 24.
(40) 2.4.4 控制點選擇問題—最大總流量模型 假設每一條健行路徑的登山客流量為已知,此模型在控制網路的建置策略上,是 在限制可用資源的前提下,以獲得最大的行動節點之總流量為目的,來選擇控制點的 佈建地點,歸納如下。 •. 限制︰整體的建置花費不得超過可用資源之上限。. •. 目標︰最大化控制點所涵蓋的行動節點之總流量。. 在此模型中,假設只在健行路徑的交界處或端點存在有候選控制點,且候選控制. 治 政 點之間的距離長度皆相等,故最大化控制點所涵蓋的行動節點之總流量,即能代表最 大 立 大化地提升服務到行動節點的機會。但由於此模型的設計目標,可能導致控制點的佈 ‧ 國. 學. 建地點,可能只集中在少數幾條行動節點流量較多的路徑上。當控制網路的搜尋範圍,. ‧. 只能涵蓋到所有健行路徑的一小部分時,將使得部分行動節點很容易就遠離了控制網 路所能提供服務的區域,而造成行動節點的搜尋成功率大為降低,或搜尋時間大幅增. io. sit. y. Nat. 加。. n. al. er. 此模型的控制網路建置設計,除了可能導致浪費可用資源外,更可能造成搜尋不 到行動代理人的嚴重後果。. Ch. engchi. i n U. v. 2.4.5 控制點選擇問題—最大涵蓋率模型 基於上述模型的缺點,另設計了最大涵蓋率模型,在此模型加入以下兩個設計目標。 1.. 必須涵蓋所有健行路徑。因為行走在沒被涵蓋到的路徑上的人,可能永遠無 法被找到。. 2.. 控制點建置位置分佈均勻。因為我們希望今天、明天、前幾天出發的人,都 可以很快地被找到。. 故此模型的設計如下︰ 25.
(41) 1、每一條健行路徑上,至少需建置一個控制點。 2、盡量讓佈建的位置平均分散,以擴大控制點所涵蓋的區域。. 但由於 Graph 由 node 和 edge 所組成,並沒有面積的概念,所以無法輕易地用較 精確的數學模型,來表示此模型的設計概念,故將此模型的設計,轉化如下︰ •. 限制一︰整體的建置花費不得超過可用資源之上限。. •. 限制二︰控制點的建置,需涵蓋到所有的健行路徑。. •. 目標︰最大化控制點所涵蓋的 edge 數。. 立. 政 治 大. 此模型為一個控制點的涵蓋率問題,並隱含「每一條 edge 的長度都一樣長」的假. ‧ 國. 學. 設,故在此模型中並沒有考慮到候選控制點之間路段的長度,如此可能導致有些長路 段 (例如︰2 小時路程),卻和短路段 (例如︰30 分鐘路程) 所設的控制點數量相同。. ‧. 另外,也應考量此路段的重要性,例如︰在容易發生山難的地方建置控制點有較高的. Nat. n. al. Ch. er. io. 2.4.6 控制點選擇問題—最大加權涵蓋率模型. sit. y. 優先度,讓此路段的控制點較為密集,才能提供更好的服務。. i n U. v. 為了彌補最大涵蓋率模型的不足,提出一個考慮更周詳的最大加權涵蓋率模型,首先,. engchi. 將環境假設修改為「不只在健行路徑的交界處或端點存在有候選控制點,若候選控制 點之間的健行路徑仍太長,也可在路徑中間另加候選控制點」 ,並加入路段重要性的考 量,希望能將候選控制點之間的路段長度、重要性等狀況,也一併考慮進去,做為此 路段的重要性權值 (權重),主要設計如下。 •. 限制一︰整體的建置花費不得超過可用資源之上限。. •. 限制二︰控制點的建置,需涵蓋到所有的健行路徑。. •. 目標︰最大化控制點所涵蓋 edges 的總權值。. 26.
數據
+7
相關文件
。當時人們發現的引擎在啟動後,機器會去尋找適合
此行文字的特別意義,是讓 MATLAB 藉由 lookfor 指令 搜尋並顯示此函式用途。.. 語法:
單一菜色與地區搜尋 ( 兩種二選一 ) 交叉搜尋 (4 種可同時 )/QR 碼搜尋.
主觀機率 指一個事件發生的機率由某 人決定,包括設計上的安排 設定,或者根據相信的程度 而猜測。.. 古典機率 假設樣本空間S中的每一個
計算機網路 微積分上 微積分下
•
媒體可以說是內容、資訊最大的生產者,但受制於 國際社交媒體及搜尋平台的經營手法,本地主流媒 體在發展網上業務時,面對不公平的競爭。 這些
西元 1998 年,G oogle 的創辦人之一賴利佩吉發表了網 頁排序的演算法,涵蓋 G oogle
