收稿日期:2002212212 ;修订日期:2003205213
基金项目:国家自然科学基金(59775002和50075010)、“863” 高技术资助项目(8632512298204227)
文章编号:100026893 (2004) 0120074205
全柔性微位移放大机构的设计技术研究
于靖军
,
毕树生,
宗光华(北京航空航天大学 机器人研究所,北京 100083)
Study on the Design of Fully Compl iant Motion Ampl if ication Mechanisms in Actuation Systems f or Micromanipulators
YU J ing2jun , BI Shu2sheng , ZON G Guang2hua
( Robotics Research Institute , Beijing University of Aeronautics and Astronautics , Beijing 100083)
摘 要:全柔性机构是一种新型机构,通过采用免装配 、无间隙和无摩擦的设计方式可实现微米级甚至纳米 级的高精度 。其重要的应用之一是可作为精密驱动系统中的运放机构 。为此,对此类机构进行了较为系统的 研究,包括典型的结构类型 、结构设计中的诸多考虑以及新型运放机构的开发等 。所有这些都为精密作业领 域中驱动系统的构筑提供了丰富的参考素材 。
关键词:全柔性机构;纳米分辨率;柔性铰链;运动放大 中图分类号: TP242 文献标识码: A
Abstract : As a new type of mechanism , which characterizes t hat all kinematic pairs are designed as flexure hinges to play t he same role as conventional joints , and may achieve a very high positioning accuracy as well as to decrease t he manufacturing and assembly costs , t he fully compliant mechanism provides a perfect alternative for t he design of t he motion amplification mechanism in actuation systems for micromanipulation applications. In t his paper , t he design issues on t he fully motion amplifier are systematically discussed : based on t he enumeration for t he typical structures of t he fully compliant motion amplification mechanisms and comprehensive considerations for t heir structural design , several novel high2accuracy and large2stroke mechanisms for amplifying t he motion have been developed.
Key words : fully compliant mechanism ; nanometer range resolution ; flexure hinge ; motion amplification
在生物工程 、微电子加工 、显微手术及航空航 天等诸多微细作业领域中 ,对其执行系统 (如操作 手) 一般要求有纳米级的分辨率和毫米甚至厘米 级的工作行程 。
对驱动器而言 ,尽管部分驱动器如压电陶瓷 等具有运动分辨率高等优点 ,但其运动范围仅限 制在在几微米到几十微米范围 。而采用普通的交 直流电机又很难达到所要求的精度 。这种相对大 行程 、高精度的驱动系统仍然是目前精密工程领 域的一个瓶颈问题 。为此 ,目前诸多系统中多采 用以下几种方案得以实现 :
(1) 采用粗精平台相结合 ( Macro2Micro) 的方 式 ,采用分阶段交互控制的方法可有效地解决精 度高行程大的矛盾 。通过对末端执行器的运动进 行分解 ,采用粗精 2 种不同类型的平台分别承担 部分的运动 。具体而言 ,将精密平台摞放在粗平 台之上 ,利用粗平台实现相对较大的运动 (精度不
要求很高) ,而利用精密平台实现高精度 ,其运动 范围可以很小 ,因此 ,粗平台可采用传统的传动方 式 (如滚珠丝杠等) ,而精密平台需采用全柔性结 构 。该方案的优点在于可实现较大范围的运动而 不受驱动器的限制 ,但结构臃肿复杂 ,且由于系统 自由度的增加使成本相对要高许多 。
(2) 采用移动式驱动系统也可有效地解决高 精度与大行程的矛盾 。目前常见的移动式驱动结 构主要是两大类 :一类是基于“尺蠖 ( Inchworm)
原理”[ 1 ],一类是基于“粘 滑 ( Stick2Slip) 效应”[ 2 ]。
两者在理论上都可实现无限大的工作行程 ,若采用 压电元件 ,其运动分辨率均可达到纳米级。但由于 目前这类产品尚未完全商品化 ,很大程度上需要自 己来开发 ,成本较为昂贵 ,控制也比较复杂。
(3) 在驱动器与执行器之间采用某种具有运 动缩放功能的结构 (可通称为运放机构) 。该方案 又可分为 2 种情况 :第 1 种是基于高精度的方法
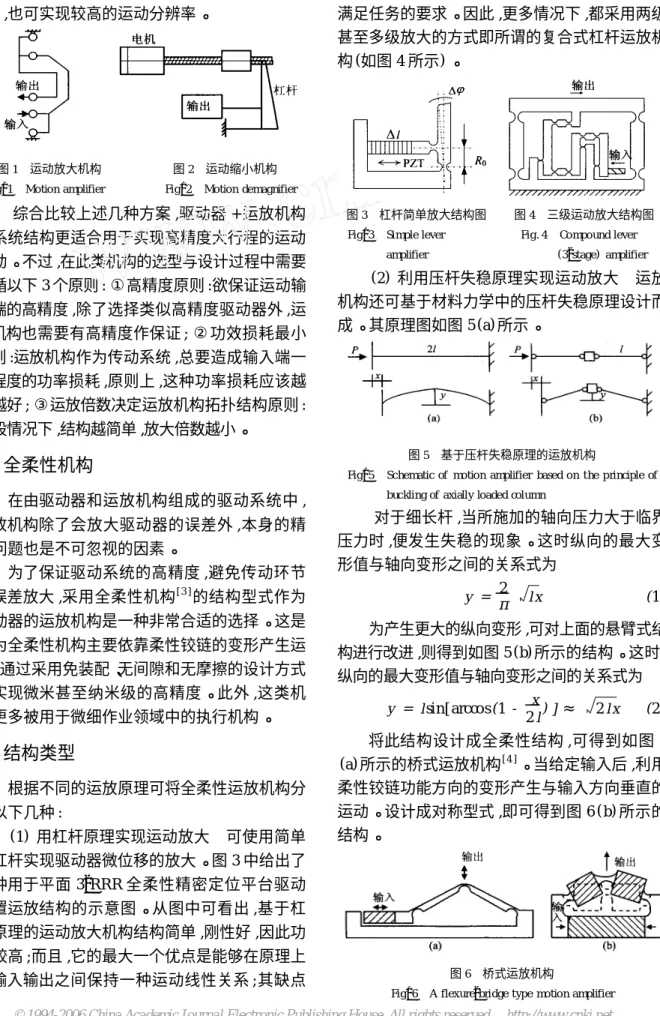
———采用压电类驱动器 + 运动放大机构 ( 如图 1) ,在运动放大无需过大的条件下 ,这是一个不错 的选择 ;第 2 种是基于大运动行程的方法 ———采
2004年 1月 ACTA A ERONAU TICA ET ASTRONAU TICA SIN ICA J an1 2004
用普通电机 + 运动缩小机构 (如图 2) ,如采用交 流伺服电机 (或直流电机) 驱动精密滚珠丝杠机 构 ,再通过杠杆原理的缩小 (或特殊机构的运动缩 小) ,也可实现较高的运动分辨率 。
图1 运动放大机构 图2 运动缩小机构 Fig11 Motion amplifier Fig12 Motion demagnifier
综合比较上述几种方案 ,驱动器 + 运放机构 的系统结构更适合用于实现高精度大行程的运动 驱动。不过 ,在此类机构的选型与设计过程中需要 遵循以下 3 个原则 : ①高精度原则 :欲保证运动输 出端的高精度 ,除了选择类似高精度驱动器外 ,运 放机构也需要有高精度作保证 ; ②功效损耗最小 原则 :运放机构作为传动系统 ,总要造成输入端一 定程度的功率损耗 ,原则上 ,这种功率损耗应该越 小越好 ; ③运放倍数决定运放机构拓扑结构原则 : 一般情况下 ,结构越简单 ,放大倍数越小。
1
全柔性机构在由驱动器和运放机构组成的驱动系统中 , 运放机构除了会放大驱动器的误差外 ,本身的精 度问题也是不可忽视的因素 。
为了保证驱动系统的高精度 ,避免传动环节 的误差放大 ,采用全柔性机构[ 3 ]的结构型式作为 驱动器的运放机构是一种非常合适的选择 。这是 因为全柔性机构主要依靠柔性铰链的变形产生运 动 ,通过采用免装配 、无间隙和无摩擦的设计方式 可实现微米甚至纳米级的高精度 。此外 ,这类机 构更多被用于微细作业领域中的执行机构 。
2
结构类型根据不同的运放原理可将全柔性运放机构分 为以下几种 :
(1) 用杠杆原理实现运动放大 可使用简单 的杠杆实现驱动器微位移的放大 。图 3 中给出了 一种用于平面 32RRR 全柔性精密定位平台驱动 装置运放结构的示意图 。从图中可看出 ,基于杠 杆原理的运动放大机构结构简单 ,刚性好 ,因此功 效较高 ;而且 ,它的最大一个优点是能够在原理上 使输入输出之间保持一种运动线性关系 ;其缺点
在于由于受到空间的限制 ,无法实现更大的运动 放大倍数 ,尤其是只通过杠杆简单的一级放大 ,放 大的倍数是有限的 ,一般不超过 10 倍 ,有时很难 满足任务的要求 。因此 ,更多情况下 ,都采用两级 甚至多级放大的方式即所谓的复合式杠杆运放机 构 (如图 4 所示) 。
图3 杠杆简单放大结构图 图4 三级运动放大结构图 Fig13 Simple lever Fig. 4 Compound lever
amplifier (32stage) amplifier
(2) 利用压杆失稳原理实现运动放大 运放 机构还可基于材料力学中的压杆失稳原理设计而 成 。其原理图如图 5 (a) 所示 。
图5 基于压杆失稳原理的运放机构
Fig15 Schematic of motion amplifier based on t he principle of buckling of axially loaded column
对于细长杆 ,当所施加的轴向压力大于临界 压力时 ,便发生失稳的现象 。这时纵向的最大变 形值与轴向变形之间的关系式为
y = 2
π l x (1) 为产生更大的纵向变形 ,可对上面的悬臂式结 构进行改进 ,则得到如图 5 (b) 所示的结构。这时 , 纵向的最大变形值与轴向变形之间的关系式为
y = lsin[ arccos(1 - x
2l) ]≈ 2l x (2) 将此结构设计成全柔性结构 ,可得到如图 6 (a) 所示的桥式运放机构[ 4 ]。当给定输入后 ,利用 柔性铰链功能方向的变形产生与输入方向垂直的 运动 。设计成对称型式 ,即可得到图 6 (b) 所示的 结构 。
图6 桥式运放机构
Fig16 A flexure2bridge type motion amplifier
(3) 通过特殊机构实现运动放大 通过杠杆 原理实现的运动放大机构中 ,由于受到最小杠杆 臂的限制不能获得较大的位移放大比 ,而采用多 级放大方式会导致结构复杂 ,进而导致运放功效 的降低 ,因此出现了用特殊机构代替杠杆以获得 较大的位移放大比 。具体如下 :
① Scott2Russell 机构[ 5 ] Scott2Russell 机构 的结构示意图如图 7 (a) 所示 。其中 A 处为固定
铰, B处为杆件, PCB 与滑块通过铰链相连 。结构
上 A C = CB = CP , A B与A P垂直,机构中由于 含有虚约束,因此该机构只有一个自由度 。当驱动 滑块B沿A B方向水平运动时, P点将沿A P所在 的竖直方向运动 。很容易得到 P点与B 点速率比 是A B / A P ,即机构的运动缩放倍数,由于输入输 出值在微米级范围,而杆件尺寸一般在厘米级范 围内,因此, A B / A P的比值可看成为常值,输入 与输出之间是一种近似线性的运动关系 。
图7 Scott2Russell机构 Fig17 Scott2Russell mechanism
②曲柄滑块机构 可采用曲柄滑块式全柔 性机构 (图 8) 来实现位移放大 。不过这种机构的 输入与输出之间均存在着原理上的非线性 。
③平面八杆机构 采用平面八连杆式全柔性 机构 (图 9) 来实现位移放大 。驱动器推动输入杆 产生微位移 ,在输出杆上产生直线运动 ,克服了平 面四杆机构非直线运动的缺点 。如果合理选择输 入杆 、连接杆及输出杆的长度可获得较大的运动 放大倍数 。
图8 曲柄滑块机构 图9 八杆对称联动机构 Fig18 Four2bar mechanism Fig19 Eight2bar mechanism
除了以上介绍的 3 种类型的运动放大机构 外 ,还有利用液压驱动原理实现运动放大的运放
机构[ 6 ]。此外 ,在文献 [ 4 ] 中还提到了基于碰撞
或快速膨胀变形原理的瞬时能量传递系统 ,这些 都不属于全柔性机构的范畴 ,在此不做讨论 。
3
结构设计当驱动器通过全柔性运放机构输出运动时 , 驱动器对柔性机构所做的功并没有全部传递给输 出端 ,而是产生了能量损耗 ,即运放机构中存在着 功效问题 。原则上 ,希望运放机构的功效越大越 好 。究竟哪些因素影响运放机构的功效以及如何 提高机构的功效是本文十分关心的问题 。
311 影响运放机构功效的因素
(1) 材料 由于材料的刚度有限 ,在材料发生 变形时 ,材料本身会吸收或消耗一定的能量 。从 趋势上看 ,材料刚度越大 ,机械效率越高 ;另一方 面 ,材料的刚度越大 ,柔性铰链处所受的应力也越 大 。因此 ,在保证柔性铰链所受应力处于材料弹 性极限以内前提下 ,通过合理选择材质 ,提高运放 机构的整体刚度 ,可达到提高功效的目的 。
(2) 柔性铰链 对全柔性运放机构 ,柔性铰链 也是影响机构刚度的一个重要因素 。具体而言 , 铰链的形状和数目都会影响机构的整体刚度 ,其 中铰链数目越多 ,越可能降低机构的刚度 。选择 基于杠杆原理的运放机构的主要理由就在于其结 构简单 、柔性铰链少 、刚性好 。另外 ,柔性铰链在 机构中主要起支撑作用 ,其理想状态只有纯粹的 弯曲变形 。实际上 ,运放机构中的杆件在传递位 移的同时也有一定力的传递 ,而有些力可以使柔 性铰链非功能方向上产生变形 ,如轴向或者侧向 的变形 ,这样便不可避免地消耗了一些能量 。两 者相比 ,侧向变形一般要比轴向变形大得多 ,因此 所消耗的能量也比轴向要大 。
(3) 结构 影响机械效率大小的因素中 ,结构 的影响同样不可忽视 。不合理的结构型式甚至对 运放机构的功效产生占主导地位的影响 。如图 1 所示机构中 ,在产生所希望的横向运动同时还有 纵向的耦合运动 ,后者是不希望有的 。另外 ,不合 理的结构还可能产生位移干涉问题 ,导致机构产 生很大的内部反力 ,从而使机构中的杆件产生轴 向非弯曲变形 ,消耗了能量 ,最终影响到运放功 效 。文献[ 7 ]中就一运放机构的位移干涉问题进 行了详细分析 ,并提出了减小位移干涉的措施 。 312 结构设计与加工过程中的几点考虑
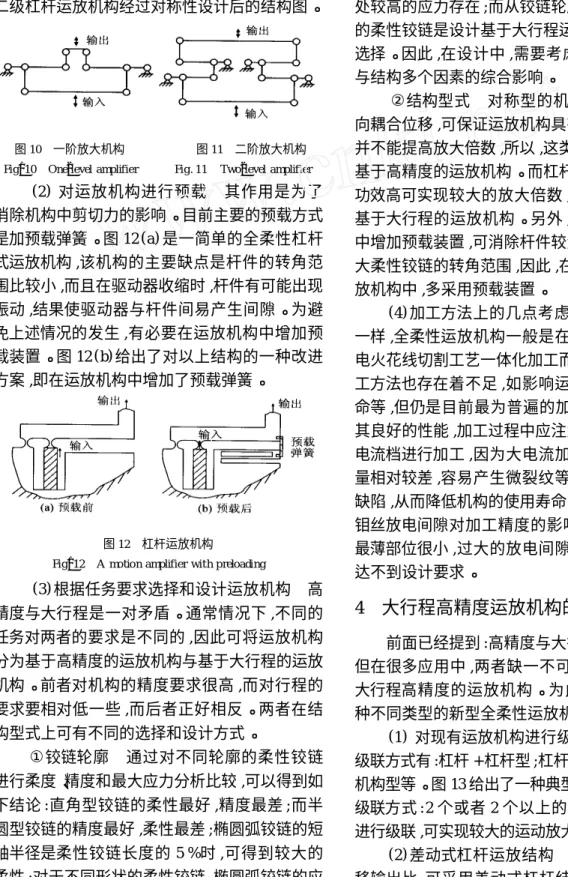
(1) 结构对称性设计 前面已经提到 ,对于如 图 1 所示的结构 ,尽管纵向耦合位移很小 ,但在其 放大倍数较大时 ,这种附加位移可达到微米级 。
不仅降低了运放机构的功效 ,而且对机构的定位 精度有较大影响 。而采用结构对称性设计可有效 地消除机构中的纵向耦合误差 ,达到提高运放机 构功效的目的 。图 10 和图 11 就是对原有一级和 二级杠杆运放机构经过对称性设计后的结构图 。
图10 一阶放大机构 图11 二阶放大机构 Fig110 One2level amplifier Fig. 11 Two2level amplifier
(2) 对运放机构进行预载 其作用是为了 消除机构中剪切力的影响 。目前主要的预载方式 是加预载弹簧 。图 12 (a) 是一简单的全柔性杠杆 式运放机构 ,该机构的主要缺点是杆件的转角范 围比较小 ,而且在驱动器收缩时 ,杆件有可能出现 振动 ,结果使驱动器与杆件间易产生间隙 。为避 免上述情况的发生 ,有必要在运放机构中增加预 载装置 。图 12 (b) 给出了对以上结构的一种改进 方案 ,即在运放机构中增加了预载弹簧 。
图12 杠杆运放机构
Fig112 A motion amplifier wit h preloading
(3) 根据任务要求选择和设计运放机构 高 精度与大行程是一对矛盾 。通常情况下 ,不同的 任务对两者的要求是不同的 ,因此可将运放机构 分为基于高精度的运放机构与基于大行程的运放 机构 。前者对机构的精度要求很高 ,而对行程的 要求要相对低一些 ,而后者正好相反 。两者在结 构型式上可有不同的选择和设计方式 。
①铰链轮廓 通过对不同轮廓的柔性铰链 进行柔度 、精度和最大应力分析比较 ,可以得到如 下结论 :直角型铰链的柔性最好 ,精度最差 ;而半 圆型铰链的精度最好 ,柔性最差 ;椭圆弧铰链的短 轴半径是柔性铰链长度的 5 %时 ,可得到较大的 柔性 ;对于不同形状的柔性铰链 ,椭圆弧铰链的应 力集中最为合理 。总之 ,高精度和大柔度总是相 矛盾的 。因此 ,在设计基于高精度的运放机构时 最好采用半圆形轮廓的柔性铰链 ;而设计基于大
行程的运放机构时所要考虑的要复杂些 ,因为基 于大行程的运放机构不仅要求大的行程 ,而且还 要求有力的输出 。为得到有效的输出力 ,必须考 虑运放机构的功效 ,而且 ,较大的行程意味着铰链 处较高的应力存在 ;而从铰链轮廓上 ,椭圆型轮廓 的柔性铰链是设计基于大行程运放机构时不错的 选择 。因此 ,在设计中 ,需要考虑材料 、铰链轮廓 与结构多个因素的综合影响 。
②结构型式 对称型的机械结构能消除纵 向耦合位移 ,可保证运放机构具有更高的精度 ,但 并不能提高放大倍数 ,所以 ,这类结构更适合用作 基于高精度的运放机构 。而杠杆式运放机构因为 功效高可实现较大的放大倍数 ,因此更适合用作 基于大行程的运放机构 。另外 ,通过对驱动系统 中增加预载装置 ,可消除杆件较大的内部反力 ,增 大柔性铰链的转角范围 ,因此 ,在基于大行程的运 放机构中 ,多采用预载装置 。
(4) 加工方法上的几点考虑 与全柔性机构 一样 ,全柔性运放机构一般是在一块材料中通过 电火花线切割工艺一体化加工而成 。尽管这种加 工方法也存在着不足 ,如影响运放机构的疲劳寿 命等 ,但仍是目前最为普遍的加工方法 。为保证 其良好的性能 ,加工过程中应注意 : ①最好选用小 电流档进行加工 ,因为大电流加工的工件表层质 量相对较差 ,容易产生微裂纹等引起应力集中的 缺陷 ,从而降低机构的使用寿命 ; ②要充分考虑到 钼丝放电间隙对加工精度的影响 ,由于柔性铰链 最薄部位很小 ,过大的放电间隙会导致加工尺寸 达不到设计要求 。
4
大行程高精度运放机构的开发前面已经提到 :高精度与大行程是一对矛盾 , 但在很多应用中 ,两者缺一不可 。目前亟待开发 大行程高精度的运放机构 。为此 ,这里提出了 3 种不同类型的新型全柔性运放机构 。
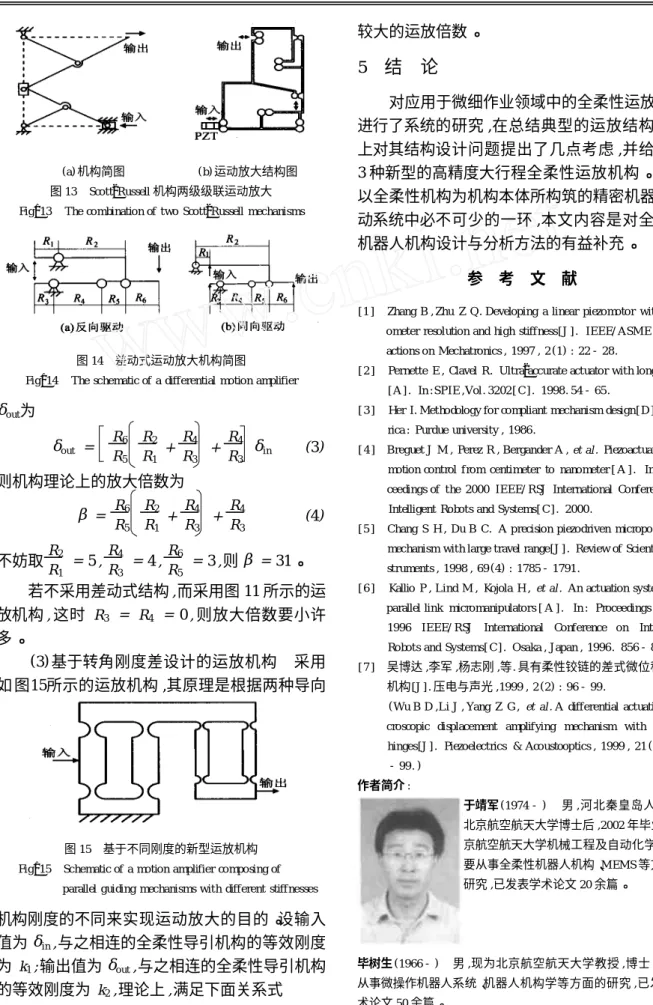
(1) 对现有运放机构进行级联 运放机构的 级联方式有 :杠杆 + 杠杆型 ;杠杆 + 机构型 ;机构 + 机构型等。图 13 给出了一种典型的机构 + 机构型 级联方式 :2 个或者 2 个以上的 Scott2Russell 机构 进行级联 ,可实现较大的运动放大比。
(2) 差动式杠杆运放结构 为实现更大的位 移输出比 ,可采用差动式杠杆结构 。其结构简图 如图 14 所示 。
假设驱动器的输出位移 (输入处) 为 δin,经过 差动式运放机构的运动放大 ,输出端的输出位移
(a)机构简图 (b)运动放大结构图 图13 Scott2Russell机构两级级联运动放大 Fig113 The combination of two Scott2Russell mechanisms
图14 差动式运动放大机构简图
Fig114 The schematic of a differential motion amplifier
δout为
δout = R6 R5
R2
R1 + R4
R3 + R4
R3
δin (3)
则机构理论上的放大倍数为
β= R6 R5
R2
R1
+ R4
R3
+ R4
R3
(4)
不妨取R2
R1 = 5,R4
R3 =4,R6
R5 = 3,则β= 31 。 若不采用差动式结构,而采用图 11 所示的运 放机构,这时 R3 = R4 = 0,则放大倍数要小许 多 。
(3) 基于转角刚度差设计的运放机构 采用 如 图15所示的运放机构 ,其原理是根据两种导向
图15 基于不同刚度的新型运放机构 Fig115 Schematic of a motion amplifier composing of
parallel guiding mechanisms wit h different stiffnesses
机构刚度的不同来实现运动放大的目的 。设输入 值为 δin,与之相连的全柔性导引机构的等效刚度 为 k1;输出值为 δout,与之相连的全柔性导引机构 的等效刚度为 k2,理论上,满足下面关系式
δout δin =
k1 + k2
k2
(5) 因此,在设计时保证 k2远小于 k1,即可实现
较大的运放倍数 。
5
结 论对应用于微细作业领域中的全柔性运放机构 进行了系统的研究 ,在总结典型的运放结构基础 上对其结构设计问题提出了几点考虑 ,并给出了 3 种新型的高精度大行程全柔性运放机构 。作为 以全柔性机构为机构本体所构筑的精密机器人驱 动系统中必不可少的一环 ,本文内容是对全柔性 机器人机构设计与分析方法的有益补充 。
参 考 文 献
[1 ] Zhang B , Zhu Z Q. Developing a linear piezomotor wit h nan2 ometer resolution and high stiffness[J ] . IEEE/ ASM E Trans2 actions on Mechat ronics , 1997 , 2 (1) : 22 - 28.
[ 2 ] Pernette E , Clavel R. Ult ra2accurate act uator wit h long t ravel [ A ] . In : SPIE ,Vol. 3202[ C] . 1998. 54 - 65.
[ 3 ] Her I. Met hodology for compliant mechanism design[ D ] . Ame2 rica : Purdue university , 1986.
[ 4 ] Breguet J M , Perez R , Bergander A ,et al . Piezoact uators for motion cont rol from centimeter to nanometer [ A ] . In : Pro2 ceedings of t he 2000 IEEE/ RSJ International Conference on
Intelligent Robot s and Systems[ C] . 2000.
[ 5 ] Chang S H , Du B C. A precision piezodriven micropositioner mechanism wit h large t ravel range[J ] . Review of Scientific In2 st rument s , 1998 , 69 (4) : 1785 - 1791.
[ 6 ] Kallio P , Lind M , Kojola H , et al . An act uation system for2 parallel link micromanipulators [ A ] . In : Proceedings of t he 1996 IEEE/ RSJ International Conference on Intelligent Robot s and Systems[ C] . Osaka , J apan , 1996. 856 - 862.
[ 7 ] 吴博达,李军,杨志刚,等.具有柔性铰链的差式微位移放大
机构[J ] .压电与声光,1999 , 2 (2) : 96 - 99.
( Wu B D ,Li J , Yang Z G , et al .A differential act uation mi2 croscopic displacement amplifying mechanism wit h flexure hinges[J ] . Piezoelect rics & Acoustooptics , 1999 , 21 (2) : 96
- 99. ) 作者简介:
于靖军(1974 - ) 男,河北秦皇岛人,现为 北京航空航天大学博士后,2002年毕业于北 京航空航天大学机械工程及自动化学院,主 要从事全柔性机器人机构 、M EMS等方面的 研究,已发表学术论文20余篇 。
毕树生(1966 - ) 男,现为北京航空航天大学教授,博士 。主要
从事微操作机器人系统 、机器人机构学等方面的研究,已发表学 术论文50余篇 。
宗光华(1943 - ) 男,现为北京航空航天大学教授 、博士生导师 。
(责任编辑 :蔡 斐)