國立臺灣大學醫學院暨工學院醫學工程學研究所 碩士論文
Institute of Biomedical Engineering
College of Medicine and College of Engineering
National Taiwan University Master Thesis
帕金森氏症患者行走跨越障礙物之多目標最佳控制策略 Multi-Objective Optimal Control Strategies of the Locomotor System During Obstacle-Crossing in Patients with Parkinson's
Disease
郭祐伸 Yu-Shen Kuo
指導教授:呂東武 博士 Advisor: Tung-Wu Lu, D.Phil.
中華民國 101 年 7 月 July, 2012
國立臺灣大學
醫 學 工 程 研 究 所
碩士論文
帕金森氏症患者行走跨越障礙物之多目標最佳控制策略
郭祐伸
撰
101
口試委員審定書
誌謝
兩年的碩士生涯轉眼已進入了尾聲,完成這份論文需要感謝的人太多,為了 避免無法親自說出的遺憾,故藉此表達我的敬愛及謝意。
首先要感謝我的指導教授 呂東武 博士,在研究遇到瓶頸時,老師適時的給 予方向及建議,讓我順利的完成碩士論文;在生活中老師透過身教及言教,提點 我做人處事的態度與應對進退的禮儀,讓我在進入職場前更懂得如何待人接物。
感謝口試委員 楊秉祥 博士、許維君 博士、謝宏榮 博士,在口試時給我指 導及建議,讓我的論文可以更加的完整。
在這兩年的研究生活,感謝骨科工程暨動作分析實驗室的所有成員的協助與 陪伴,感謝博士班學長姐:士文、祝芬、聖昌、榮娟、佳達、宗遠、正忠、炫綸、
彥宏;碩士班學長姊:哲安、廷伊、偉菁、致佑、方杰、佑庭;碩士班成員:江 昊、玠瑋、瑋純、立德、振立、淳晧、慶儒、David、琮淇;大學部成員:慧柏;
研究助理:蓉蓉、欣蘭、採掀、怡明,並特別感謝秉璋、碩辰、逸翔、郁寰協助 本論文之結果資料處理。因為實驗室的各位,讓我在這兩年學習到不同領域的專 業及知識,也讓研究生涯增添不少歡樂色彩。
最後感謝永遠支持我的父母親-文俊、美蓉以及女友-佩欣,因為有你們無私的 付出及鼓勵,讓我能無後顧之憂的專心於學業研究,能在今年順利的完成我的學 業生涯,順利取得學位,謝謝你們,我愛你們!
郭祐伸 謹誌 一零一年七月於台灣大學醫學工程研究所 骨科工程暨動作分析實驗室
中文摘要
動作的改變帕金森氏症最主要的臨床特徵,過去的研究也指出帕金森氏症患 者在執行日常動作例如走路、跨越障礙物較為困難。跨越失敗將導致跌倒與受傷 [1-3]。
帕金森氏症患者跨越障礙物的動作分析研究,著重其運動系統參數的表現,
如關節角度、關節力矩、關節間協調性、身體質量中心與壓力中心傾斜角的差異 性[36],隨障礙物高度的不同,有些參數改變,有些參數不變,運動參數確實可對 關節表現討論,但無法討論整體動作控制策略。Lu(2012)提出的多目標最佳控制方 法,定義跨越障礙物之目標函數可由最小能量消耗與最大足部間隙妥協組合而成,
並可描述跨越障礙物之控制策略[4]。
本研究目的為使用多目標最佳控制方法,探討帕金森氏症跨越不同高度障礙 物之動作控制策略,並探討後腳跨越障礙物與前腳跨越障礙物之策略差異。受試 者分為三組:15 位正常中老年人(Normal),15 位帕金森氏症第一期患者(PD-I),15 位帕金森氏症第二至三期患者(PD-II&III),每位受試者被要求跨越三種不同高度之 障礙物。本研究結果指出,跨越障礙物之控制策略並無高度間差異,有明顯的組 間差異,其中PD-I 表現與 Normal 接近,與 PD-II&III 服藥前有顯著差異,PD-II&III 服藥前(Off)有較保守的跨越障礙物策略;PD-I 健側(Non-Dominant)與患側
(Dominant)跨越障礙物之控制策略無顯著差異;PD-II&III 用藥後(On)控制策略較接 近PD-I & PD-II&III;前後腳控制策略只有 Normal 有顯著差異,Normal 後腳跨越 的控制策略趨於保守,PD-I & PD-II&III 前後腳控制策略並無顯著差異,表示視覺 回饋在帕金森氏症患者的控制策略沒有影響。本研究結果提供帕金森氏症患者與 前後腳跨越障礙物一個簡單、明確並足以描述跨越障礙物神經控制系統的指標,
未來可用於帕金森氏症分級與用藥效果評估之參考。
關鍵字:動作分析、帕金森氏症、運動控制策略、跨越障礙物
Abstract
Movement change is the essential symptom of Parkinson’s disease (PD). Obstacle crossing and walking with a simple cognitive task increase the task demands for the patients with PD. Failure to cross the obstacle will result in falls and injuries[1-3].
Kinematic and kinetic data, such as joint angle, joint moment, inter-joint coordination and COM-COP inclination angle, is used in motion analysis of patients with PD during obstacle crossing[36]. Although these data are useful for evaluating the functional performance of patients with PD, there still exist difficulties in the synthesis of the information to uncover the overall control strategies. Lu(2012) suggested that obstacle-crossing was formulated as an optimal control problem with two conflicting objectives: minimization of mechanical energy expenditure and maximization of foot-obstacle clearance[4].
The purposes of the present study were to identify the control strategy of patients with PD obstacle-crossing of different heights with a multi-objective optimal control (MOOC) technique. 15 mid-old subjects, 15 1st stage of patients(PD-I), 15 2nd-3rd stage of patients(PD-II&III) were asked to walked and crossed obstacles of three different heights while their kinematic and ground reaction force data were measured simultaneously.
Differences of control strategies of obstacle crossing were not found in height effects, but found in group effects. The strategies of PD-I are similar to Normal group, but different with PD-II&III. PD-II&III before treatment (Off) is shown an conservative control strategies; There were no significant differences of control strategies between non-dominant limb and dominant limb during obstacle crossing; Strategies of PD-II&III after treatment (On) is similar to PD-I & PD-II&III; Differences of control strategies in leading and trailing limbs were only found in Normal group, control strategies of Normal trailing limb is more conservative, this mean the visual feedback is not effect in patients with PD. The present study is useful for studying obstacle-crossing form a system level perspective in patient with PD. The results will help in classification of PD and estimation of medical treatment.
Keywords: Parkinson’s disease, motion analysis, motor control strategy,
obstacle-crossing
目錄
口試委員審定書 ... I 誌謝 ... II 中文摘要 ... III Abstract ... IV
第一章 緒論 ... 1
1.1 研究背景 ... 1
1.1.1 帕金森氏症 ... 1
1.1.2 跨越障礙物 ... 3
1.1.3 跨越障礙物之運動系統控制策略 ... 5
1.1.4 運動系統之連桿模型 ... 6
1.2 研究目的 ... 7
第二章 材料與方法 ... 9
2.1 受試者 ... 9
2.2 實驗器材與流程 ... 10
2.2.1 實驗器材 ... 10
2.2.2 實驗流程 ... 11
2.3 實驗資料處理 ... 12
2.3.1 下肢局部座標系統定義 ... 12
2.3.2 廣義/局部座標系統轉換 ... 18
2.3.3 力板資訊 ... 19
2.4 二維人體模型建立 ... 20
2.4.1 七連桿運動學 ... 21
2.4.2 七連桿模型動力學 ... 23
2.5 跨越障礙物之最佳化控制 ... 31
2.5.1 最佳化控制方法 ... 31
2.5.2 單目標最佳化控制數學模型 ... 33
2.5.3 多目標最佳化控制模式數學模型 ... 34
2.5.4 單目標與多目標最佳化收斂軌跡示範圖 ... 35
2.6 統計分析 ... 40
第三章 結果 ... 41
3.1 前腳跨越 ... 41
3.1.1 組間差異 ... 42
3.1.2 高度間差異 ... 43
3.2 後腳跨越障礙物 ... 44
3.2.1 組間差異 ... 45
3.2.2 高度間差異 ... 46
3.3 帕金森氏症第一期患者健側與患側跨越障礙物控制策略比較 ... 47
3.4 帕金森氏症第二至三期患者用藥前後跨越障礙物控制策略比較 ... 48
3.5 前後腳跨越障礙物之控制策略比較 ... 49
第四章 討論 ... 51
4.1 正常受試者權重值分布 ... 51
4.2 高度間差異 ... 51
4.3 組間差異 ... 52
4.4 帕金森氏症第一期患者健側與患側跨越障礙物控制策略比較 ... 52
4.5 帕金森氏症第二至三期患者用藥前後跨越障礙物控制策略比較 ... 52
4.6 前腳與後腳跨越障礙物之控制策略比較 ... 53
4.7 研究限制與未來展望 ... 53
第五章 結論 ... 54
參考文獻 ... 55
圖目錄
圖 2-1 可調高度障礙物 ... 10
圖 2-2 被動式紅外線反光標記黏貼處示意圖 ... 11
圖 2-3 盆座標局部座標系統示意圖 ... 14
圖 2-4 大腿座標局部座標系統示意圖 ... 15
圖 2-5 小腿座標局部座標系統示意圖 ... 16
圖 2-6 足部座標局部座標系統示意圖 ... 17
圖 2-7 廣義/局部座標系統轉換示意圖 ... 18
圖 2-8 壓力中心計算示意圖 ... 19
圖 2-9 關節角度示意圖 ... 21
圖 2-10 鉸鏈關節( )、肢段質量中心(‧)、全身質量中心(★) ... 22
圖 2-11 肢段由自由體圖 ... 23
圖 2-12 跨越腳髖關節水平位置等時間間隔示意圖 ... 31
圖 2-13 搜尋擺盪腳膝關節示意圖 ... 32
圖 2-14 前腳跨越障礙物單目標預測踝關節軌跡圖 ... 36
圖 2-15 前腳跨越障礙物多目標最佳化預測之四組權重值之踝關節軌跡 ... 37
圖 2-16 後腳跨越障礙物單目標預測踝關節軌跡圖 ... 38
圖 2-17 後腳跨越障礙物多目標最佳化預測之四組權重值之踝關節軌跡 ... 39
圖 3-1 前腳跨越障礙物之組間差異,*表示有顯著差異,橫軸為相同組別受試者 ... 42
圖 3-2 前腳跨越障礙物高度間差異,橫軸表示相同障礙物高度組別。 ... 43
圖 3-3 後腳跨越障礙物之組間差異,*表示有顯著差異,橫軸為相同組別受試者 ... 45
圖 3-4 後腳跨越障礙物高度間差異,橫軸表示相同障礙物高度組別 ... 46
表目錄
表 2-1 受試者資料表。 ... 9 表 2-2 定義下肢各肢段局部座標系統之標記代號說明[34]。 ... 13 表 2-3 身體各肢段之 Dempster’s 係數。 ... 20 表 3-1 前腳跨越障礙物最佳妥協解結果整理,平均值(標準差),最後兩欄分別為
高度間差異與組間差異統計結果之P 值。 ... 41 表 3-2 後腳跨越障礙物最佳妥協解結果整理,平均值(標準差),最後兩欄分別為
高度間差異與組間差異統計結果之P 值。 ... 44 表 3-3 PD-I 前腳跨越健側與患側之控制策略權重值平均(標準差)與 P 值。 ... 47 表 3-4 PD-I 後腳跨越健側與患側之控制策略權重值平均(標準差)與 P 值。 ... 47 表 3-5 PD-II&III 前腳跨越用藥前(Off)與用藥後(On)之權重值平均(標準差)與 P 值。
... 48 表 3-6 PD-II&III 組後腳跨越用藥前(Off)與用藥後(On)之控制策略權重值平均(標
準差)與 P 值,(*)表示有顯著差異。 ... 48 表 3-7 Normal 組,前後腳跨越障礙物之控制策略權重值平均(標準差)與 P 值,(*)
表示有顯著差異。 ... 49 表 3-8 PD-I 組健側,前後腳跨越障礙物之控制策略權重值平均(標準差)與 P 值。
... 49 表 3-9 PD-I 組患側,前後腳跨越障礙物之控制策略權重值平均(標準差)與 P 值。
... 50 表 3-10 PD-II&III 組用藥前,前後腳跨越障礙物之控制策略權重值平均(標準差)與
P 值。 ... 50 表 3-11 PD-II&III 組用藥後,前後腳跨越障礙物之控制策略權重值平均(標準差)與
P 值。 ... 50 表 4-1 年輕人前後腳跨越障礙物之控制策略權重值平均(標準差)與 P 值[4]。 ... 51
1
第一章 緒論
1.1 研究背景
1.1.1 帕金森氏症
帕金森氏症 (Parkinson’s disease)其特徵為基底核 (Basal ganglia)黑質緻密部 (Substantia nigra pars compacta) 之多巴胺神經元顯著的退化並導致多巴胺的不足,
多巴胺缺乏造成從被殼到外部蒼白球的抑制增加和視丘下核的抑制減少,視丘下 核藉著谷氨酸作用 (Glutamatergic action) 過度活化而使得內部蒼白球及黑質網狀 部過度刺激,將導致視丘皮質 (Thalamocortical) 和腦幹運動中心過度抑制
(Akinesia) [5, 6],造成靜止性震顫(Resting tremor) 、身體僵硬 (Rigidity) 、動作遲 緩 (Bradykinesia) 、姿勢不穩 (Postural instability) 等運動方面的問題[7]。
帕金森氏症常發生在年齡超過 50 歲之中老年人。帕金森氏症發病將影響步態,
患者可能會停止於步態中期並呈現凍結狀態甚至跌倒,出現一系列快速而小的碎 步,以彎腰前傾姿勢保持平衡以及手臂擺動減少。
帕金森氏症為進行性神經退化疾病,具有以下4 個典型的臨床表現:
震顫:震顫是帕金森氏症的特徵。在典型情況下的震顫形式為有節奏的前後 運動,頻率為4-6 赫茲。其可能影響拇指和食指並呈現丸狀滾動震顫。震顫通 常開始於手,有的患者則是步行時或下顎開始出現震顫。震顫最明顯的時候 是在手靜止時或是心理承受壓力時,通常手放在桌上靜止後會出現幾秒鐘的 明顯晃動。震顫在睡眠或意圖動作時會消失。
僵硬:僵硬或運動阻力影響到大多數的帕金森氏症患者,可能是肌肉變得更 加活躍,也可能是拮抗肌變得更加放鬆。帕金森氏症患者當大腦訊號傳遞至 肌肉時,拮抗肌失衡即造成僵硬,肌肉持續緊張並不斷收縮,使患者感到疼
痛、僵硬或無力。當他人移動患者手臂時僵硬會變得更明顯,動作呈現鋸齒 狀或動作很短,此不順的動作稱作齒輪狀僵硬。
運動遲緩:運動遲緩或運動緩和為自發運動的減少,可能使簡單的任務變得 困難而讓患者感到沮喪。患者不能迅速執行例行的動作,原本快速簡單的功 能性活動如盥洗或穿衣時可能需要幾個小時。
姿勢不穩定:姿勢不穩定或平衡和協調受損,使患者呈現向前或向後傾並容 易跌倒。當從正面遭遇碰撞時或走路起始時,患者呈現後傾或倒退幾步。姿 勢不穩定可能導致患者呈現駝背的姿勢,使得頭部前弓和肩部下垂。
目前診斷帕金森氏症是根據患者的症狀、病史及神經系統檢查。如果有以下 情形時即可能診斷為帕金森氏症:
1. 至少有上述 4 項帕金森氏症基本症狀之 2 項。
2. 發病症狀僅出現於單側。
3. 靜止時有明顯震顫。
4. 對左旋多巴藥物有強烈反應。
神經系統檢查包括評估行走和協調性,以及一些簡單的手部任務。帕金森氏 症統一評定量表 (Unified Parkinson’s Disease Rating Scale, UPDRS) 是最常見的神 經系統檢查標準,其中包括認知、行為、情感以及日常功能活動表現 [2]。
帕金森氏症的分期以美國神經學家 Hoehn 及 Yahr 醫生所制定的分期來分 (Hoehn & Yahr stage) :
第一期:症狀僅發生在單側。
第二期:症狀發生於兩側,姿勢平穩。
第三期:症狀發生於兩側,影響行走平衡且容易跌倒,於後拉測試無法平衡。
第四期:獨立行走有困難,日常生活需要他人照顧。
第五期:幾乎全日需仰賴輪椅,或臥床無法起身。[8]
1.1.2 跨越障礙物
關於跨越障礙物的研究著重於下肢各個關節的運動學(Kinematic)與動力學 (Kinetic)的運動特徵資料這些資料可以描述基本的障礙物跨越運動。
1.1.2.1 跨越障礙物之運動學分析
Chen(1991)研究指出跨越速度會隨著高度增加而減少(Chen, Ashton-Miller et al.
1991),老年人跨越障礙物時採取較為保守的步態:較短的步長(Step length)、較 慢的跨越速度。研究中也指出跨越障礙物時,足部距離障礙物的最低點82%為腳 跟(Heel)、8%為腳底中間位置(Midsole )與 10%為腳趾(Toe),這說明跨越障礙物時 若腳跟或腳底中間位置觸碰到障礙物跌倒的機會較腳趾觸碰到障礙物時低[9]。
Austin(1999)針對四種固定高度障礙物,量測 15 位受試者在跨越障礙物時的運 動狀態,研究指出跨越腳與障礙物的間隙會隨著障礙物的高度增加而增加[10]。
Sparrow(1996)年提出障礙物高度依腿長正規化(Normalization)之概念,並用以研 究12 位受試者跨越小腿長(Leg length)的 10%、25%及 40%的障礙物高度[11]。其 研究指出,跨越障礙物時跨越腳與障礙物的間隙並不會受障礙物的高度影響。以 上提及的研究可歸納出:當障礙物高度為固定時,跨越腳和障礙物間的間隙會隨 著障礙物高度的增加而增加,但是當障礙物的高度隨著小腿長正規化後,根據統 計結果,腳與障礙物的間隙並不受影響。
Chen(2004)研究年輕人跨越障礙物三種障礙物高度(正規化於小腿長度 10%、
20%、30%)進行運動學資料量測,指出年輕人前腳跨越一高於 79.4mm 障礙物高度 時,足部間隙並不受障礙物高度影響;後腳跨越時足部間隙不受障礙物高度影響 [12]。Lu(2006)研究老年人與年輕人跨越三種障礙物高度(正規化於小腿長度 10%、
20%、30%)之運動學量測資料比較,指出老年人前腳跨越障礙物時比年輕人有較 大的腳趾間隙(toe clearance),而在後腳跨越障礙物時,足部間隙則與年輕人五顯著 差異[13]。
Lu(2007)以關節角度與角速度的極座標相位角 (Phase angle, φ),從近端關節相 位角減去遠端關節相位角可得到兩關節間之相對相位角 (Relative phase angle, RPA),探討關節間協調性(inter-joint coordination)。將相對相位角於動作週期標準 化為百分比,計算平均標準差可得偏差相位 (Deviation phase, DP),以表示兩關節 間的穩定度。該研究指出前腳跨越與後腳跨越關節間協調性相似,但後腳的偏差 相位(DP)較大,較不穩定[14]。Yen(2009)研究老年人與年輕人跨越障礙物時關節間 協調性差異,該研究指出老年人前腳跨越障礙物增加腳趾與障礙物的間隙,但是 關節間協調性與年輕人無顯著差異。老年人前腳跨越時,因為有較大的腳趾間隙,
導致關節協調性的變異性大於年輕人;後腳跨越時關節協調性與變異性與年輕人 無顯著差異。該研究結論指出年齡對於跨越障礙物時的下肢關節控制會增加變異 性。[15]
Huang(2008)探討跨越障礙物時身體質量中心(center of mass)與壓力中心 (center of pressure)的傾斜角(inclination angle)與年齡、障礙物高度的關係。身體質 量中心與壓力中傾斜角與傾斜角速度可以討論人體動態穩定控制能力,研究指出 在腳趾跨越障礙物的瞬間,老年人比年輕人有較小的傾斜角,指出老年人的神經 肌肉系統有更大的空間去控制跨越腳保有足夠的跨越腳趾間隙,以確保成功的跨 越障礙物。該研究也發現隨著障礙物提高,受試者的傾斜角會降低,表示身體質 量中心較靠近壓力中心,以增加身體穩定度[16]。
1.1.2.2 跨越障礙物之動力學分析
Chou(1997)以 14 位年輕人為受試者,跨越四種不同的高度,並比較站立腳在 跨越不同高度障礙物時腳趾與障礙物的距離和各關節間的角度與力矩。研究指出 不同的障礙物高度並沒有影響腳尖與障礙物之間的距離,但髖關節與膝關節隨著 障礙物高度提高彎曲的角度也增加,膝關節的差別尤其明顯[17]。Chou(1998)分析 跨越障礙物時站立腳跨越障礙物的關節力矩和跨越腳腳趾與障礙物距離(Toe
distance)和不同障礙物高度的關係,研究指出縮短站立腳與障礙物的距離會對腳踝 的關節力矩造成重大的影響,而增加障礙物的高度則會對髖關節的力矩有較顯著 的影響[18]。
Chen(2006)對人體跨越障礙物時的動力學資訊做探討,討論人體跨越障礙物時 的峰值關節力矩(Peak moments)與跨越力矩(crossing moments),其中跨越力矩係跨 越腳跨越瞬間之關節力矩。研究指出高度對於關節力矩的影響並無法用峰值關節 力矩與跨越力矩的比較而得知,研究結果也發現前腳跨越與後腳跨越的峰值關節 力矩與跨越力矩並不一致,表示前後腳跨越障礙物時,動力學策略並不一致。[19]
由上述的研究結果,我們可以發現對個別獨立關節的運動學與動力學的研究,
確實可以評估各個關節的能力表現,但是在探討前後腳跨越障礙物的差異時,缺 乏一個簡易、定量的指標來描述前後腳跨越障礙物時的策略。
1.1.3 跨越障礙物之運動系統控制策略
最佳化控制方法已經被用來研究許多功能性動作運動系統的控制策略。用一 個動作運動系統產生的變數,組合成一個數學型式的目標函數,當此目標函數經 最佳化方法收斂後,此目標函數可預測該動作運動系統的軌跡。若目標函數預測 出的軌跡與實驗量測的軌跡相符,則該目標函數及代表該功能性動作的控制策略 [20, 21]。
以Chou(1997)研究二維七連桿模型模擬人跨越障礙物為例,目標函數為跨越 過程中各個關節所做的功,設計變數則是擺動腳的腳踝關節位置,其研究發現預 測所得腳踝位置無法與實驗量測值相同,所以最小關節做功(目標函數)並非跨越障 礙(功能性動作系統)的控制策略[17]。
對於人類步行是以最小能量消耗為目標是目前研究一致的看法[17, 22-24]。在 這個目標下,步行必須保持身體穩定及腳趾與地板有一定的間隙,而跨越障礙物 的動作行為與步行有些許相似,最大的差異在於擺盪腳(Swing foot)必須抬高得以
跨越障礙物。越大的足部間距,就能避免碰到障礙物,但是相對的要增加較多的 能量消耗。由Chou(1997)的結果指出,最小能量消耗並非跨越障礙物的控制策略,
並且單目標最小能量並無法確認足部間隙是足以安全的跨越障礙物,所以推測跨 越障礙物的控制策略必須為最小能量與足部間隙取得妥協解(Compromise),並且可 以討論最小能量與足部間隙的妥協解是否會因為障礙物高度變化而改變[17]。
Armand(1998)發表一五連桿二維下肢模型,以自訂的權重函數(Weighting functions)運用多目標最佳化將運動學與動力學變數加總定義成目標函數,但權重 函數設計以直觀方法(Intuitive manner)定義,並沒有參考生理學或機械動力學原理。
根據上述,目前對於跨越障礙物尚未有明確的控制策略[25]。
Lu(2012)提出一多目標最佳控制方法(Multi-objective optimal control, MOOC),
以二維七連桿模型模擬人體跨越障礙物之矢狀面運動狀態,並明確定義跨越障礙 物之目標函數。該研究提出跨越障礙物的目標函數是由最小能量消耗(minimum energy expenditure)與最大足部間隙(maximum foot clearance)妥協(compromise)組合 而成,並足以描述跨越障礙物的控制策略[4]。
1.1.4 運動系統之連桿模型
大部分的研究使用連桿模型來描述一個運動系統,因為連桿模型可以預測動力 學變數或預測運動軌跡,一個連桿模型若有完整動力學資訊即可推測連桿運動學,
我們稱之為正向動力學問題(forward dynamic problem),反之,若連桿模型具有完 整的運動學資訊即可推導連桿動力學,稱之逆向動力學問題(inverse dynamic problem)。
過去有文獻建立人體的模型:矢狀平面單側的四連桿模型[26, 27]、雙側三連 桿([28])、七連桿模型[29, 30],與三維的肌肉骨骼模型等[29, 31, 32]。.
Mehran Armand(1998)以股二頭肌(Biceps)和股四頭肌(Rectus femoris)的最大力 量(Peak force)及其收縮相關參數作為設計變數,並以步長、跨越腳腳趾離地瞬間
(Toe off)與障礙物距離實驗資料、跨越腳腳跟著地(Heel on)時腳趾與重心距離、足 部與障礙物間隙為目標,以多目標最佳化方式求得跨越障礙物的最佳化曲線。此 研究將站立腳模擬成單一連桿,並無法確切的模擬站立腳的運動狀態,此外其目 標函數均為運動表象參數,並採用直覺式的方法定義各目標權重,無法反應控制 策略[25]。
Ju(1988)發表兩個下肢模型,分別是二維與三維的下肢模型,其模型適用於雙 腳站立期(Double limb support phase)。該模型將腳底形狀由二次曲線模擬而非直線,
如此得以使在雙腳站立期中足底的接觸皆維持一點。研究指出在二維平面上所得 的運動情形與三維模型在矢狀平面上的動作相似[29]。
McFadyen(1994)發展一模型模擬跨越障礙物,給定關節角度軌跡於不同步行 型態(Gait pattern)下不同的權重,以模擬出跨越障礙物的軌跡。此研究為一單側模 型,選取之變數並不能代表人體控制策略[33]。
Chao and Rim(1973)發表一組二維動力學模型研究步行,利用最佳化方法以關 節力矩為設計變數,以模型計算所得之關節軌跡與實驗值的差距最小化為目標,
並求出各關節的作用力與力矩。如此可以得到與實驗值相當接近的結果,其模型 僅包含擺盪腳,無法完整表現步態週期中模型與地面反作用力的關係[27]。
Onyshko(1980)發表一組二維的平面七連桿模型,將整個步態的週期分為 4 階 段,4 個階段分別模擬地面與固定腳的關係,進而計算整個步態過程中走路的方式。
其模型僅限於步行時的運動[30]。
1.2 研究目的
動作的改變帕金森氏症最主要的臨床特徵,過去的研究也指出帕金森氏症患 者在執行日常動作例如走路、跨越障礙物較為困難。一個成功的跨越障礙物動作 不僅要有足夠的腳趾間隙,也需要有足夠力量的支撐腳來維持身體穩定。跨越失
敗將導致跌倒與受傷[1-3]。
帕金森氏症患者跨越障礙物的動作分析研究,著重其運動系統參數的表現例 如,關節角度、力矩、關節間協調性、身體質量中心與壓力中心傾斜角的差異性,
並無法用明確、簡單的指標來描述帕金森氏症患者的動作控制策略。
Lu(2012)提出的多目標最佳控制方法,可以描述年輕人跨越障礙物的動作控制 策略,但其研究僅研究年輕人的前腳跨越障礙物的控制策略,並無討論後腳跨越 障礙物與其他患者跨越障礙物的控制策略。[4]
故本研究目的:
1. 使用多目標最佳控制方法於中老年人與帕金森氏症患者,探討中老年人與 年輕人的控制策略、中老年人與帕金森氏症患者的控制策略的差異,其中 帕金森氏症患者包含兩個組別-第一期帕金森氏症患者與第二至三期帕金 森氏症患者。
2. 第一期帕金森氏症患者為單邊患側,故本研究將討論第一期帕金森氏症患 者健側腳(Non-Dominant limb)與患側腳(Dominant limb)跨越障礙物時的控 制策略差異。
3. 第二至三期帕金森氏症患者皆有服用藥物,故本研究將探討其服藥前(Off) 與服藥後(On)之跨越障礙物的控制策略差異。
4. 本研究增加後腳跨越障礙物之控制策略,以探討各組受試者前後腳跨越障 礙物時的控制策略差異。
第二章 材料與方法
本研究之動作分析實驗資料係由本實驗室 陳致佑學長擷取與提供[36]。
2.1 受試者
本研究受試者分為三組,分別為第一期帕金森症組、第二期至第三期帕金森 症組與正常控制組。所有受試者皆為有意願及瞭解實驗流程者,並簽署醫學倫理 委員會所通過之受試者同意書。受試者資料如:
表 二-1 受試者資料表。
第I期受試者 第II–III期受
試者 健康受試者
性別(女/男) 9/6 10/5 10/5
年齡(歲) 59.70 (8.06) 62.60 (9.35) 61.87 (6.45) 身高(公分) 159.90 (9.25) 158.40 (7.24) 158.53 (4.87) 體重(公斤) 61.30 (6.40) 60.30 (11.60) 59.02 (13.99) 腳長-前上髂脊至內側踝(公分) 80.70 (5.74) 81.50 (3.08) 79.12 (2.82) 病程時間 (年) 0.78 (0.21) 5.52 (2.08) - Hoehn & Yahr 分期 1 (0) 2.69 (0.48) - 帕金森氏症統一評定量表 16.75 (9.54) 31.57 (10.26) - 靜止型顫抖 0.30 (0.50) 2.70 (2.30) - 動作型或姿勢型顫抖 1.30 (1.30) 2.17 (1.33) - 僵硬 2.50 (1.91) 4.50 (2.35) - 姿勢平穩度 0.75 (0.96) 2.17 (0.75) - 全身的動作遲緩 0.80 (0.50) 1.20 (0.40) - 步態 0.75 (0.50) 1.83 (0.75) -
異動症 0 (0) 0.67 (0.52) -
2.2 實驗器材與流程
2.2.1 實驗器材
被動式紅外線反光標記黏貼於皮膚表面,以描述各肢段的空間位置。反光標 記軌跡藉由包含7 台紅外線攝影機之動作分析系統 (Vicon 512, Oxford Metrics Group, UK) 所量測。可調式高度障礙物長 1.5 公尺、直徑 1.5 公分的鋁合金管,放 置在一個可調整高度的金屬框架上如:圖. 2 1 ,黏貼兩個紅外線反光標記於鋁合 金管的兩側末端來定義障礙物的位置,鋁合金管在碰觸時即會從金屬框架上掉落,
以降低受試者跨越失敗而跌倒的風險。2 塊測力板 (AMTI, U.S.A.) 擺放於障礙物 之兩側,在動作執行時用來測量地面反作用力。
圖 二-1 可調高度障礙物
2.2.2 實驗流程
Step 1-紅外線反光標記黏貼(Marker):
受試者將於各肢段骨突點(Bone Landmark)黏貼被動式紅外線反光標記,全身 共41 個,黏貼位置參考如圖 二-2 [34]
Step 2-靜態校正(Subject calibration):
完成黏貼反光標記後,需在所有反光標記皆可同時被兩台以上紅外線攝影機 拍攝到的情況下,擷取受試者站立數秒的反光標記軌跡資料,此資料提供定義受 試者於解剖中間位置(Anatomy neutral position)狀態下,各肢段的局部座標系統 與彼此之間的相對關係。
Step 3-跨越動作執行:
障礙物的高度包含三種,分別為受試者小腿長的10%、20%與 30%長度。受 試者在每一個障礙物高度跨越六次,如果在跨越障礙物的過程中,受試者碰觸到 障礙物,則該次試驗的資料將不被採納。
圖 二-2 被動式紅外線反光標記黏貼處示意圖
2.3 實驗資料處理
本研究實驗資料包含反光標記在空間中的軌跡、力板量測的力與力矩。由於 反光標記在運動過程中可能會因肢段遮掩而有標記軌跡資料缺失,本實驗採用 Veldpaus(1988)所提出的最小平方法,依肢段反光標記相同形狀原理進行遺失資料 的估算,該研究假設個肢段為剛體(Rigid body),並且藉由各肢段的局部座標系統 (Local coordinate system)來描述肢段上反光標記的彼此關係(VWD)(Veldpaus, Woltring et al. 1988),所以首先定義本研究局部座標系統的定義方法,並介紹廣義 座標系統(Global coordinate system)與局部座標系統轉換的方法。
2.3.1 下肢局部座標系統定義
本研究依ISB 建議,局部座標系統定義各軸方向:X 軸向前、Y 軸向上及 Z 軸向右。下肢肢段之局部座標系統以肢段上至少三個以上不共線之骨標記(反光標 記)相對於廣義座標系統(Global Coordinate System)下所定義,此處廣義座標系 統定義為三維動作分析實驗室之實驗室座標系統。(見下頁)
下表為定義下肢各肢段局部座標系統所需之標記代號說明:
表 二-2 定義下肢各肢段局部座標系統之標記代號說明[34]。
肢段名稱 標記名稱 解剖標記位置 英文對照
骨盆
(pelvis)
RASI 右腸骨前上棘 anterior superior iliac spine RPSI 右腸骨後上棘 posterior superior iliac spine LASI 左腸骨前上棘 anterior superior iliac spine LPSI 左腸骨後上棘 posterior superior iliac spine
大腿(thigh)
RTRO LTRO 股骨大轉子 greater trochanter RTHI LTHI 大腿外側 thigh wand marker RLFC LLFC 股骨的外側髁 lateral femoral epicondyle center RMFC LMFC 股骨的內側髁 medial femoral epicondyle
center
小腿
(shank)
RSHA LSHA 腓骨的頭 head of fibula RTT LTT 脛骨粗隆 tibial tuberosity RLMA LLMA 腓骨的外側髁 lateral malleolus RMMA LMMA 脛股的內側髁 medial malleolus 足
(foot)
RHEE LHEE 腳後跟 heel
RFOO LFOO 舟狀骨粗隆 navicular tuberosity RTOE LTOE 第五蹠骨粗隆 tuberosity of 5th metartasal bone
骨盆(Pelvis)局部座標系統之定義如:圖 二-3,以右側腸骨前上棘前面最突 出處(RASI)、左側腸骨前上棘前面最突出處(LASI)及右側腸骨後上棘後面最 突出處(RPSI)定義其局部座標系統 = , , 。以RASI 為原點,可依(式 2.1,式 2.2,式 2.3) 決定各座標軸之單位向量。若為左側骨盆座標系統,原點可 移至LASI。
圖片來源:http://www.zygotebody.com/
=| | (式 二.1)
= (( )×)× (式 二.2)
= × (式 二.3) 圖 二-3 盆座標局部座標系統示意圖
大腿(Thigh)局部座標系統之定義如:圖 二-4(以右側為例),以大轉子外側 最突出處(RTRO)為原點,利用股骨外上髁最外側突出處(RLFC)及股骨內上髁最內 側突出處(RMFC)兩點,可定義大腿局部座標系統 = ( , , ) 如(式 2.4,
式2.5,式 2.6)。左側同理。
=| | (式 二.4)
=|(( )×)× | (式 二.5)
= × (式 二.6) 圖 二-4 大腿座標局部座標系統示意圖
小腿(Shank)局部座標系統之定義如:圖 二-5(以右側為例),以脛骨粗隆最 突出處(RTT)、外踝外側最突出處(RLMA)、內踝內側最突出處(RMMA)及腓骨頭 (RSHA)定義局部座標系統 = ( , , ) 。以 RTT 為原點,各單位向量計算 如(式 2.7,式 2.8,式 2.9)。左側同理。
=|(( )×( )
)×( )| (式 二.7)
= ( )×
( )× (式 二.8)
= × (式 二.9) 圖 二-5 小腿座標局部座標系統示意圖
足部(Foot)部分之局部座標系統定義如:圖 二-6(以右側為例),以跟骨後側 最突出處(RHEE)、舟狀骨結節最突出處(RFOO)及第五個蹠骨外側最近端(RTOE) 等皮膚骨標記定義足骨局部座標系統 = ( , , )。以 RHEE 為其原點,各 座標軸單位向量決定如(式 2.10,式 2.11,式 2.12)。左側同理。
= (式 二.10)
= ( )×
|( )× | (式 二.11)
= × (式 二.12) 圖 二-6 足部座標局部座標系統示意圖
2.3.2 廣義/局部座標系統轉換
本實驗假設各肢段為剛體,為使用最小平方法估算遺失的反光標記,標記需 使用局部標系統描述,而實驗設備輸出的反光標記空間軌跡資料為相對於實驗室 的廣義座標系統,故定義各肢段的局部座標系統後,兩座標系統的轉換方法如:
圖 二-7。
P = + ∙ P (式 二.13)
=
∙ ∙ ∙
∙ ∙ ∙
∙ ∙ ∙
其中廣義座標系統 S = ( , , ),局部座標系統 S = ( , , ),旋轉矩陣 計算方法如上式,標記點(圖 圓點處),廣義座標系統描述標記點 P , 局
圖 二-7 廣義/局部座標系統轉換示意圖
部座標系統描述標記點 P ,座標系統轉換如(式 二.14)。
2.3.3 力板資訊
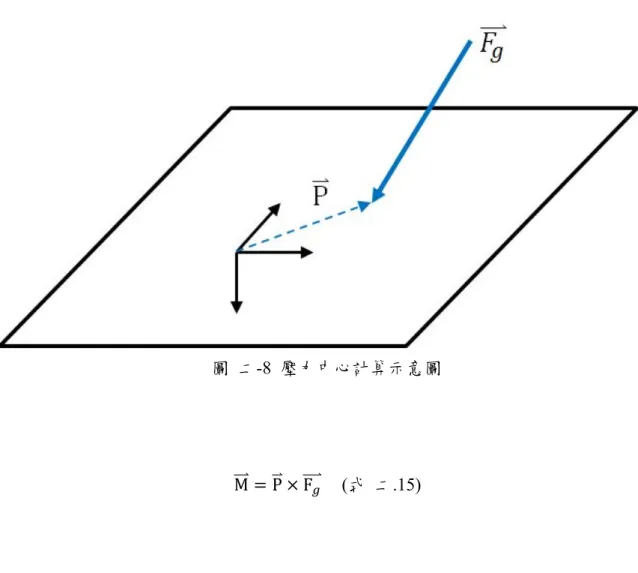
力板量測資料為力的作用結果,實驗輸出資料為相對於力板局部座標系統的 力(F)與力矩(M),又力量與力矩可以簡化成地面反作用力(Ground reaction force, GRF)作用於壓力中心(P) (Center of pressure, COP),如:圖 二-8。
M = P × F (式 二.15)
由(式 二.16)可得壓力中心位置,力板規格可定義出力板局部座標系統,藉由 座標轉換可用廣義座標系統表示地面反作用力與壓力中心。
圖 二-8 壓力中心計算示意圖
2.4 二維人體模型建立
本章旨為描述本研究如何運用運動學資料建立二維模型,以及二維模型的力 動學資料計算。
本研究二維模型將全身模擬成七個剛體連桿機構,分別為站立腳的足部(fixed foot, FF)、小腿(fixed shank, FS)和大腿(fixed thigh,FT),及擺盪腳的足部(swing foot, SF)、小腿(swing shank, SS)和大腿(swing thigh, ST),骨盆與上半身的軀幹、頭部、
頸部與雙手則模擬成一個剛體(head, arm and trunk, HAT)。模型的髖關節、膝關節 與踝關節以無摩擦力鉸鏈關節(hinge joint)模擬,並且站立腳足部與地面以一個鉸 鏈關節連接。因為假設各肢段為剛體,所以各肢段質心在各肢段的區域座標系統 中位置固定,且其慣性矩與質量也均為定值。模型肢段質量、慣性矩、關節中心 位置、肢段長度定義參照Dempster’s 係數(coefficients)如:表 二-3[35]
表 二-3 身體各肢段之 Dempster’s 係數。
Segment Definition
Segment Weight/
Total Body Weight
Center of Mass/
Segment Length
Proximal Distal
Foot Lateral malleolus/head metatarsal II 0.0145 0.5 0.5
Leg Femoral condyles/medial malleolus 0.0465 0.433 0.567
Thigh Greater trochanter/femoral condyles 0.1 0.433 0.567
HAT Greater trochanter/glen humeral joint 0.678 0.626 0.374
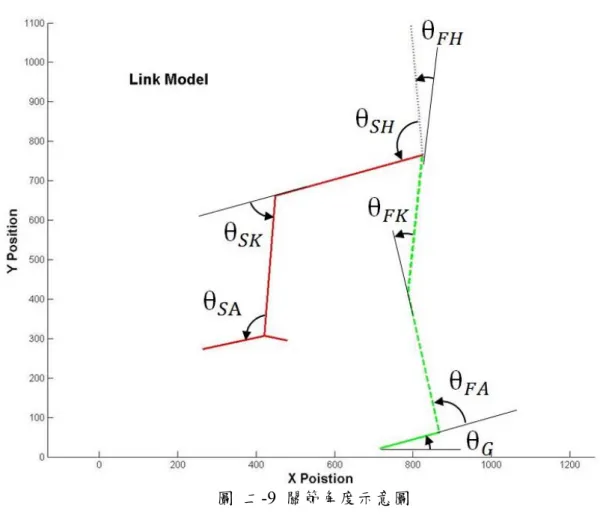
2.4.1 七連桿運動學
本模型在平面上的位置決定步驟:使用關節中心在矢狀平面上的投影,由關 節投影位置決定肢段與水平面的夾角,再藉由兩關節間的夾角差做為模型七個關 節角度如圖依序為足部關節角度(θ )、站立腳踝關節角度(θ )、膝關節角度(θ )、
髖關節角度(θ ),擺盪腳髖關節角度(θ )、膝關節角度(θ )、踝關節角度(θ ),
如:圖 二-9。
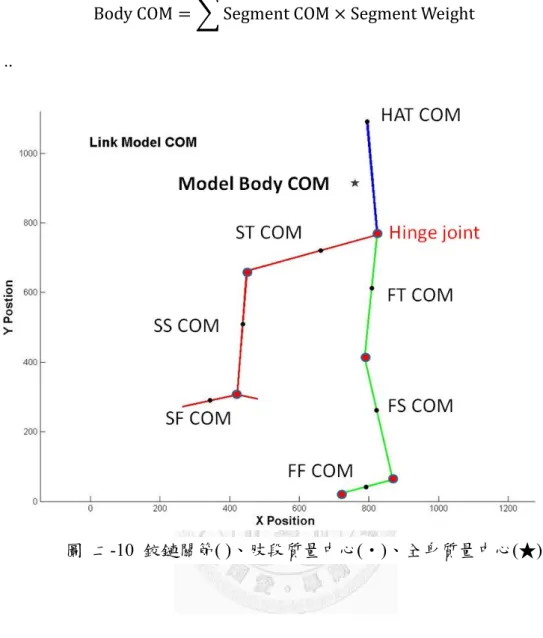
關節角度搭配參照Dempster’s 係數定義的肢段長度,由地面與足部的鉸鏈關 節為原點,依序定義各關節位置。七連桿剛體模型共包含七個無摩擦力鉸鏈關節 如:圖 二-10。模型肢段質量中心(Center of mass, COM)位置定義參照 Dempster’s 係數的近遠端比例,七連桿剛體模型整體質量中心依據方程式:
圖 二-9 關節角度示意圖
Body COM = Segment COM × Segment Weight ..
圖 二-10 鉸鏈關節( )、肢段質量中心(‧)、全身質量中心(★)
2.4.2 七連桿模型動力學
連桿模型的各肢段藉由自由體圖(Free body diagram)可表示如:圖 二-11。
藉由力平衡方程式(式 二.17,式 二.186):
∑ = F + F + g = a (式 二.19)
∑ = M + M + r × F + r × F = H (式 二.20)
因跨越障礙物動作較慢,角加速度對角動量(H)影響甚小,故本研究七連桿模 型計算時令角動量為零,以簡易模型計算,根據上式,若有近(Distal)/遠端(Proximal) 其中一端的力(F)與力矩(M)資訊,搭配該肢段質量(m)即可推算彼端肢力與力矩,
從跨越腳末端出發,依序計算各肢段肢內力即為逆向動力學,本研究之公式推導:
圖 二-11 肢段由自由體圖
公式推導:
擺盪腳足部公式推導
FS_ = maS_ − FS_ − mS_ g (式 二.21)
MS_ = −MS_ − rS_ × FS_ − rS_ × FS_ (式 二.22)
其中
FS_ :作用於擺盪腳趾關節之外力。
FS_ :作用於擺盪腳踝關節之外力。
MS_ :作用於擺盪趾關節之力矩。
MS_ :作用於擺盪腳踝關節之力矩。
rS_ :擺盪腳趾關節至擺盪腳足部質心之向量。
rS_ :擺盪腳踝關節至擺盪腳足部質心之向量。
mS_ :擺盪腳足部質量。
aS_ :擺盪腳足部質心加速度。
擺盪腳小腿公式推導
F _ = ma _ + F _ − m _ g (式 二.23)
M _ = M _ − rS_ × FS_ − r _ × F _ (式 二.24)
其中
FS_ :作用於擺盪腳踝關節之外力。
F _ :作用於擺盪腳膝關節之外力。
MS_ :作用於擺盪腳踝關節之力矩。
M _ :作用於擺盪腳膝關節之力矩。
r _ :擺盪腳膝關節至擺盪腳小腿質心之向量。
rS_ :擺盪腳踝關節至擺盪腳小腿質心之向量。
m _ :擺盪腳小腿質量。
a _ :擺盪腳小腿質心加速度。
擺盪腳大腿公式推導
F _ = ma _ + F _ − m _ g (式 二.25)
M _ = M _ − rS_ × FS_ − r _ × F _ (式 二.26)
其中
F _ :作用於擺盪腳髖關節之外力。
F _ :作用於擺盪腳膝關節之外力。
MS_ :作用於擺盪腳髖關節之力矩。
M _ :作用於擺盪腳膝關節之力矩。
r _ :擺盪腳膝關節至擺盪腳大腿質心之向量。
rS_ :擺盪腳髖關節至擺盪腳大腿質心之向量。
m _ :擺盪腳大腿質量。
a _ :擺盪腳大腿質心加速度。
上肢公式推導
F _ = ma + 0 − m g (式 二.27)
M _ = 0 − rS_ × FS_ − r _ × F _ (式 二.28)
其中
F _ :上肢連桿對髖關節端點之作用力。
M _ :上肢連桿對髖關節端點之力矩。
r _ :上肢連桿端點至上肢質心之向量。
rS_ :擺盪腳髖關節至上肢質心之向量。
m :上肢質量。
a :上肢質心加速度。
支撐腳大腿公式推導
F _ = ma _ + (F _ + F _ ) − m _ g (式 二.29) M _ = M _ + M _ − r _ × F _ + F _ − r _ ×
F _ (式 二.30)
其中
F _ :作用於支撐腳膝關節之外力。
M _ :作用於支撐腳膝關節之力矩。
r _ :支撐腳髖關節至支撐腳大腿質心之向量。
r _ :支撐腳膝關節至支撐腳大腿質心之向量。
m _ :支撐腳大腿質量。
a _ :支撐腳大腿質心加速度。
支撐腳小腿公式推導
F _ = ma _ + F _ − m _ g (式 二.31)
M _ = M _ − r _ × F _ − r _ × F _ (式 二.32)
其中
FF_ :作用於支撐腳踝關節之外力。
F _ :作用於支撐腳膝關節之外力。
MF_ :作用於支撐腳踝關節之力矩。
M _ :作用於支撐腳膝關節之力矩。
r _ :支撐腳膝關節至支撐腳小腿質心之向量。
rF_ :支撐腳踝關節至支撐腳小腿質心之向量。
m _ :支撐腳小腿質量。
a _ :支撐腳小腿質心加速度。
支撐腳足部公式推導
F _ = ma _ + F _ − m _ g (式 二.33)
M _ = M _ − r _ × F _ − r _ × F _ (式 二.34)
其中
FF_ :作用於支撐腳踝關節之外力。
F _ :作用於支撐腳趾關節之外力。
MF_ :作用於支撐腳踝關節之力矩。
M _ :作用於支撐腳趾關節之力矩。
r _ :支撐腳趾關節至支撐腳足部質心之向量。
rF_ :支撐腳踝關節至支撐腳足部質心之向量。
m _ :支撐腳足部質量。
a _ :支撐腳足部質心加速度。
2.5 跨越障礙物之最佳化控制
2.5.1 最佳化控制方法
單目標最佳化控制問題可運用參數化方法轉換成一個非線性規劃(Nonlinear programming, NLP)問題。要達成參數化則必須將平面空間中的跨越腳踝關節軌跡 離散(Discretizing),離散後的軌跡座標即可當作非線性規劃中的設計變數,若離散 個數為n 個,設計變數集合為Y = , , … , ,理論上n 的數值越大越能重現原 始設計變數的軌跡,但是相對的,n 的數值越大也代表非線性規劃問題維度越大,
對於求解難度越高,並且也沒有更有效率的求出正確最佳解,而目前相關的研究 所提出的經驗n 值大約為 20。
以七連桿模型模擬跨越障礙物前,首先定義跨越障礙動作的週期,在擺盪腳 腳趾離地(Toe-off)時定義為跨越開始(y ),在跨越障礙物後,跨越腳接觸地面即為 跨越結束(y ),又依據上述 n 值建議,將跨越週中跨越腳踝關節軌跡等時間間隔為 20 個平面空間位置如:圖 二-12。
圖 二-12 跨越腳髖關節水平位置等時間間隔示意圖
本研究以跨越腳踝關節軌跡(各時間點垂直高度)為設計變數,為簡化模型,在 最佳化控制過程中,跨越腳踝關節的跨越週期裡,開始與結束的位置由實驗量測 值提供,並且跨越過程中站立腳的關節角度,包含站立腳站立足部關節角度(θ )、
腳踝關節角度(θ )、膝關節角度(θ )、髖關節角度(θ ),也從實驗量測值取得。
執行模擬時,每次改變設計變數,將重新計算擺盪腳膝關節位置,在膝關節 位置確認後,即可計算擺盪腳髖關節角度(θ )、膝關節角度(θ )、踝關節角度(θ ),
擺盪腳膝關節位置計算方法如:圖 二-13。
各別以擺盪腳踝關節位置(PSA)、寬關節位置(PH)為圓心,以擺盪腳大腿(LST) 與小腿的肢段長度(LST)為半徑畫圓,即可交會出擺盪腳膝關節位置(PSK),然而兩 個圓交會的點可能會有兩個,故必須再搭配幾何形狀與向量關係,以確認擺盪腳 膝關節位置。
圖 二-13 搜尋擺盪腳膝關節示意圖
七連桿運動系統建構完成後,即得知該連桿運動學資訊,再由逆向動力學,
從擺盪腳足部開始計算各關節內力、關節力矩、關節角度、關節角速度等動力學 資訊。
2.5.2 單目標最佳化控制數學模型
在第一章歸納出跨越障礙物的策略須在最小能量消耗(Energy expenditure)與 足部間隙取得妥協,又研究指出足部間隙中,腳趾間隙(Toe clearance)、腳跟間隙 (Heel clearance)皆為評斷是否能安全跨越障礙的依據,故本研究使用三個目標函數,
其各別數學模型由以下討論。
2.5.2.1 最小能量消耗
本研究離散跨越腳軌跡資訊時,等時間切割20 等分,其中每一時間點之水平 位移定義與實驗量測相同,所以設計變數為跨越腳踝關節軌跡在已知的水平位置 的高度,故設計變數以y 為變數代號。
設計變數:
Y = , , … ,
能量消耗的計算方法是加總特定時間內的作用在肢段上所有力量與力矩對肢 段產生之功率,其最佳化目標函數數學模型如下:
f (Y) = ∑ ∑ ∆ (∆ = ) (式 二.35)
其中
:為第i 個肢段連趕,第 j 個時間點之關節力矩。
:為第i 個肢段連趕,第 j 個時間點之關節腳速度。
2.5.2.2 最大腳趾間隙
腳趾間隙定義為腳趾通過障礙物正上方時,腳趾與障礙物之間隙距離,本研 究為使運算目標函數速度加快,將腳趾間隙( )計算簡化成在 n 個時間點中,最 靠近障礙物之腳趾高度扣掉障礙物高度。
其最佳化目標函數數學模型如下:
f (Y) = − (式 二.36)
2.5.2.3 最大腳跟間隙
與腳趾間隙同理,其腳跟間隙( )最佳化模型如下:
f (Y) = − (式 二.37)
為了使七連桿模型行為表現符合人體動作表現,本研究定義幾項限制條件 (Constrains),方程式如下:
前後兩時間點位置垂直高度相差不得大於一距離(d),其中 d 隨不同跨越情況 給定避免過份限制連桿動作表現:
≤ 1 , i = 1~19 (式 二.38)
前後兩時間點踝關節位置可決定一斜率(m),為使連桿行為表現符合人體動作 表現,限制前後兩斜率絕對值差距不得大於dm,其中 dm 由該受試者實驗行為表 現決定,通常為dm 0.3~0.5:
≤ 1 , i = 1~18 (式 二.39)
2.5.3 多目標最佳化控制模式數學模型
要同時考慮不同目標函數的互相妥協結果,需要藉由多目標最佳化方法,本 研究以權重法(Weighting method),將多目標最佳化數學模型轉換成等效多目標之
單目標數學模型。其方法為設定一組權重值(W = ),其中,將 該權重值乘以正規化(Normalization)後的目標函數,數學方程式如下:
f(Y) = ∗ (Y)+ ∗(Y)+ ∗ (Y) (式 二.40)
其中f∗為單目標最佳化收斂的函數值。
等校多目標最佳化模型如下:
設計變數:
W 目標函數:
RMSE(Y − )
邊界條件:
+ + = 1 (式 二.41)
目標函數為達成該權重比例下收斂的髖關節軌跡與實驗量測值的方均跟誤差 值(RMSE),目標函數收斂代表控制的踝關節軌跡最接近實驗量測值,則此時的權 重比例稱為最佳妥協解(Best-compromised),該權重值即可說明跨越障礙物的控制 策略。
2.5.4 單目標與多目標最佳化收斂軌跡示範圖
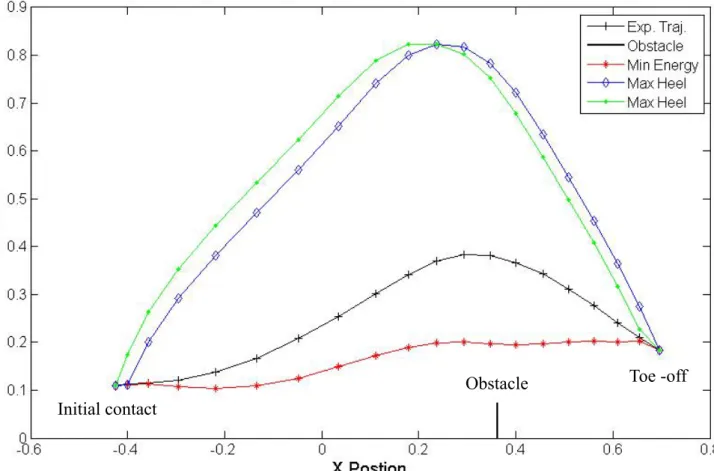
圖 二-14 所示,最小能量消耗所預測出的擺盪腳踝關節軌跡(紅色米字線)高度 較實驗量測值(Exp. Traj. 黑色十字線)低,說明前腳跨越障礙物的策略並非最小能 量消耗;最大腳趾間隙(藍色點字線)與最大腳跟間隙(綠色菱形線)所預測出的擺盪 腳踝關節軌跡皆比實驗量測值高。
由此可說明前腳跨越障礙物,單目標表示的控制策略不吻合實際的控制策略,
並推測可由三個單目標組合取得最佳妥協解。
圖 二-14 前腳跨越障礙物單目標預測踝關節軌跡圖 Obstacle
Initial contact Toe -off
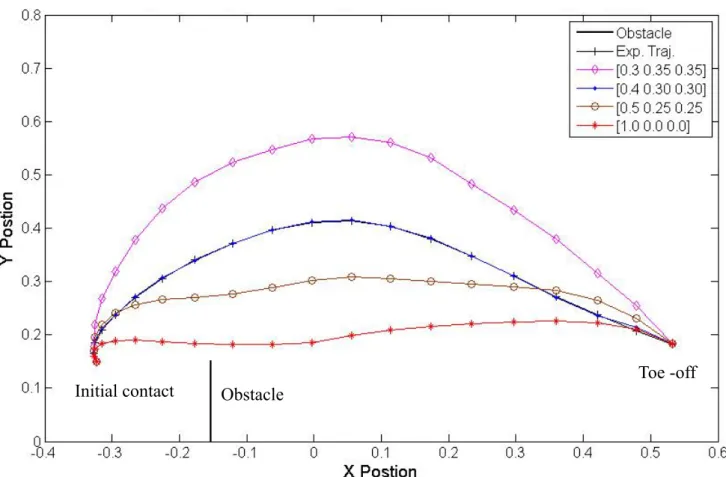
由圖 二-15 可得前腳跨越障礙物之多目標最佳化,能量消耗權重值增加或足 部間係權重值減少時,預測的踝關節軌跡會下降,由圖可看出該示範最佳妥協解 約為[0.4 0.3 0.3]。
圖 二-15 前腳跨越障礙物多目標最佳化預測之四組權重值之踝關節軌跡 Obstacle
Initial contact Toe -off
圖 二-16 最小能量消耗所預測出的擺盪腳踝關節軌跡(紅色米字線)高度較實 驗量測值(Exp. Traj. 黑色十字線)低,說明後腳跨越障礙物的策略並非最小能量消 耗;最大腳趾間隙(綠色點字線)與最大腳跟間隙(藍色菱形線)所預測出的擺盪腳踝 關節軌跡皆比實驗量測值。
由此可說明前腳跨越障礙物,單目標表示的控制策略不吻合實際的控制策略,
並推測可由三個單目標組合取得最佳妥協解。
圖 二-16 後腳跨越障礙物單目標預測踝關節軌跡圖 Obstacle Initial contact
Toe -off
由圖 二-17 可得後腳跨越障礙物之多目標最佳化,能量消耗權重值增加或足 部間係權重值減少時,預測的踝關節軌跡會下降,由圖可看出該示範最佳妥協解 介於[0.6 0.2 0.2]與[0.8 0.1 0.1]之間。
圖 二-17 後腳跨越障礙物多目標最佳化預測之四組權重值之踝關節軌跡 Initial contact
Toe -off Obstacle
2.6 統計分析
本研究將使用Two-way ANOVA 與 Paired t-test 統計方法進行分析,討論三種 分組統計的差異,其顯著水準設在α = 0.05:
1. 組間差異:討論正常中老年人(Normal)、帕金森氏症第一期患者(PD-I)與 帕金森氏症第二、三期(PD-II&III)三組受試者之間在最佳化控制所得最佳妥協解之 能量消耗權重值是否有差異,當組間差異存在時,將使用Duncan 之事後比較法做 事後分析,以比較兩兩群組之間差異。
2. 高度間差異:討論三種障礙物高度,相對於受試者小腿長度正規化 10%、
20%、30%的障礙物高度,在能量消耗權重值是否有差異,當高度間差異存在時,
將使用Duncan 之事後比較法做事後分析,以比較兩兩群組之間差異。
3. 帕金森氏症第一期患者之健側與患側比較:將健側與患側之結果分為兩 個資料群,進行Paired t-test 統計,以比較健側患側控制策略差異。
4. 帕金森氏症第二至三期患者之用藥前後比較:將用藥前與用藥後之結果 分為兩個資料群,進行Paired t-test 統計,以比較用藥前與用藥後控制策略差異。
5. 前後腳差異:將各組受試者之結果分為前腳跨越與後腳跨越的兩個資料 群進行Paired t-test 統計,比較前後腳是否有顯著差異。
本研究結果統計使用統計軟體SPSS 13.0 (SPSS Inc., Chicago, USA)。
第三章 結果
3.1 前腳跨越
表 三-1 為三組受試者使用多目標最佳化模擬前腳跨越三種不同高度障礙物 所得最佳妥協解平均值與標準差。第一列為三組受試者的最佳化控制方法所得能 量消耗權重值、第二列為三組受試者之腳趾間隙權重值,第三列為三組受試者腳 跟間隙權重值,最後兩欄分別為組間差異與高度間差異之統計結果(P 值)。
表 三-1 前腳跨越障礙物最佳妥協解結果整理,平均值(標準差),最後兩欄分 別為高度間差異與組間差異統計結果之P 值。
Leading Group Obstacle height (% Leg Length)
Height Effect Group Effect 10% (std) 20% (std) 30% (std)
Energy expenditure
Normal 0.56 (0.07) 0.54 (0.08) 0.53 (0.06)
p=0.9634 p=0.0028 PD-I 0.52 (0.10) 0.51 (0.11) 0.53 (0.11)
PD-II&III 0.42 (0.10) 0.46 (0.09) 0.47 (0.12)
Toe clearance
Normal 0.22 (0.03) 0.23 (0.03) 0.24 (0.03)
p=0.9634 p=0.0028 PD-I 0.24 (0.05) 0.25 (0.05) 0.23 (0.06)
PD-II&III 0.29 (0.05) 0.27 (0.04) 0.27 (0.06)
Heel clearance
Normal 0.22 (0.03) 0.23 (0.03) 0.24 (0.03)
p=0.9634 p=0.0028 PD-I 0.24 (0.05) 0.25 (0.05) 0.23 (0.06)
PD-II&III 0.29 (0.05) 0.27 (0.04) 0.27 (0.06)
3.1.1 組間差異
組間差異係將同一組受試者的能量消耗權重值放同一組,如圖 三-1 橫軸為 Normal、PD-I、PD-II&III,藉此比較三組受試者之間的差異。
圖 三-1 前腳跨越障礙物之組間差異,*表示有顯著差異,橫軸為相同組別受 試者
表 三-1 前腳跨越障礙物最佳妥協解結果整理,平均值(標準差),最後兩欄分 別為高度間差異與組間差異統計結果之P 值。可得 Group 的 P 值為 0.0028,表示 前腳跨越障礙物時不同組別的受試者間有顯著差異。再由事後比較法得知
N=PD1>PD23,其中 N 表示正常老人控制組(Normal)、PD1 表示帕金森氏症第一期 患者(PD-I)、PD23 表示帕金森氏症第二期到第三期患者(PD-II&III)。由此可知 Normal 與 PD-I 的能量消耗權重值相當,但大於 PD-II&III,也可推測巴金森氏症 第二期到第三期患者在前腳跨越障礙物時控制策略傾向降低能量消耗權重值/增加 腳趾間距與腳跟間距的權重質,以確保成功跨越。
0.56
0.52
0.42 0.54
0.51
0.46 0.53 0.53
0.47
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Normal PD-I PD-II&III
10%
20%
30%
*
*
3.1.2 高度間差異
高度間差異係將跨越相同高度障礙物的能量消耗權重值放同一組,如圖 三-2 橫軸為障礙物高度10%、20%、30%,藉此比較不同高度之間差異。
圖 三-2 前腳跨越障礙物高度間差異,橫軸表示相同障礙物高度組別。
表 三-1 可得高度間差異的 P 值為 0.9634,表示同樣障礙物高度之間並無顯著 差異。由此可以推論前腳跨越障礙物時,障礙物高度不論在任何組別受試者皆不 會影響前腳跨越障礙物的控制策略。
0.56 0.52 0.54 0.51 0.53 0.53
0.42 0.46 0.47
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
10% 20% 30%
Normal
PD-I
PD-II&III
3.2 後腳跨越障礙物
表 三-2 後腳跨越障礙物最佳妥協解結果整理,平均值(標準差),最後兩欄分 別為高度間差異與組間差異統計結果之P 值為三組受試者使用多目標最佳化模擬 後腳跨越三種不同高度障礙物所得最佳妥協解平均值與標準差。第一列為三組受 試者的最佳化控制方法所得能量消耗權重值、第二列為三組受試者之腳趾間隙權 重值,第三列為三組受試者腳跟間隙權重值,最後兩欄分別為組間差異與高度間 差異之統計結果(P 值)。
表 三-2 後腳跨越障礙物最佳妥協解結果整理,平均值(標準差),最後兩欄分 別為高度間差異與組間差異統計結果之P 值。
Leading Group Obstacle height (% Leg Length)
Height Effect Group Effect 10% (std) 20% (std) 30% (std)
Energy expenditure
Normal 0.51 (0.11) 0.52 (0.10) 0.51 (0.12)
PD-I 0.51 (0.08) 0.46 (0.12) 0.50 (0.12)
p=0.7602 p=0.0085
PD-II&III 0.39 (0.12) 0.42 (0.10) 0.42 (0.09)Toe clearance
Normal 0.25 (0.06) 0.24 (0.06) 0.24 (0.06)
PD-I 0.25 (0.04) 0.27 (0.06) 0.25 (0.06)
p=0.7602 p=0.0085
PD-II&III 0.31 (0.06) 0.29 (0.05) 0.29 (0.05)Heel clearance
Normal 0.25 (0.06) 0.24 (0.06) 0.24 (0.06)
PD-I 0.25 (0.04) 0.27 (0.06) 0.25 (0.06)
p=0.7602 p=0.0085
PD-II&III 0.31 (0.06) 0.29 (0.05) 0.29 (0.05)3.2.1 組間差異
組間差異係將同一組受試者的能量消耗權重值放同一組,如圖 三-3 橫軸為 Normal、PD-I、PD-II&III,藉此比較三組受試者之間的差異。
圖 三-3 後腳跨越障礙物之組間差異,*表示有顯著差異,橫軸為相同組別受 試者
表 三-2 可得組間差異的 P 值為 0.0085,表示後腳跨越障礙物時不同組別的受 試者間有顯著差異。再由事後比較法得知N=PD1>PD23,其中 N 表示正常老人控 制組(Normal)、PD1 表示帕金森氏症第一期患者(PD-I)、PD23 表示帕金森氏症第二 期到第三期患者(PD-II&III)。由此可知 Normal 與 PD-I 的能量消耗權重值相當,但 大於PD-II&III,也可推測巴金森氏症第二期到第三期患者在後腳跨越障礙物時控 制策略傾向降低能量消耗權重值/增加腳趾間距與腳跟間距的權重質,以確保成功 跨越。
0.51 0.51
0.39 0.52
0.46
0.42 0.51 0.50
0.42
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Normal PD-I PD-II&III
10%
20%
30%
*
*
3.2.2 高度間差異
高度間差異係將跨越相同高度障礙物的能量消耗權重值放同一組,如圖 三-4,
藉此比較不同高度之間差異。
圖 三-4 後腳跨越障礙物高度間差異,橫軸表示相同障礙物高度組別
錯誤! 找不到參照來源。可得高度間差異的 P 值為 0.7602,表示同樣障礙物高 度之間並無顯著差異。由此可以推論後腳跨越障礙物時,障礙物高度不論在任何 組別受試者皆不會影響後腳跨越障礙物的控制策略。
0.51 0.51 0.52 0.51 0.46 0.50 0.39 0.42 0.42
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
10% 20% 30%
Normal
PD-I
PD-II&III
3.3 帕金森氏症第一期患者健側與患側跨越障礙物控制策略比較
由結果3.2.2 高度間差異指出,障礙物高度對於各組受試者皆無影響,本節比 較健側與患側差異排除障礙物高度因子。帕金森氏症第一期患者,前腳跨越障礙物時,健側與患側的權重值並無顯著 差異(P 值>0.05),如表 三-3。
表 三-3 PD-I 前腳跨越健側與患側之控制策略權重值平均(標準差)與 P 值。
帕金森氏症第一期患者,後腳跨越障礙物時,健側與患側的權重值並無顯著 差異(P 值>0.05),如表 三-4。
表 三-4 PD-I 後腳跨越健側與患側之控制策略權重值平均(標準差)與 P 值。
PD-I (Leading) Non-Dominant Dominant
P value mean (std) mean (std)
Energy expenditure 0.49 (0.11) 0.45 (0.10) 0.141 Toe Clearance 0.25 (0.05) 0.27 (0.05) 0.132 Heel Clearance 0.26 (0.05) 0.27 (0.05) 0.139
PD-I (Trailing) Non-Dominant Dominant
P value mean (std) mean (std)
Energy expenditure 0.51 (0.11) 0.47 (0.10) 0.092 Toe Clearance 0.24 (0.05) 0.26 (0.05) 0.071 Heel Clearance 0.26 (0.05) 0.26 (0.05) 0.108
3.4 帕金森氏症第二至三期患者用藥前後跨越障礙物控制策略比較
由結果3.2.2 高度間差異指出障礙物高度對於各組受試者皆無影響,本節比較 服藥前(Off)與服藥後(On)之跨越障礙物策略差異,排除障礙物高度因子。帕金森氏症二至三期患者,於前腳跨越障礙物,用藥前與用藥後有顯著差異(P 值<0.05),如表 三-5。並且由平均值可看出,用藥後受試者於前腳跨越障礙物之 能量消耗權重值增加,足部間隙的權重值降低。
表 三-5 PD-II&III 前腳跨越用藥前(Off)與用藥後(On)之權重值平均(標準差)與 P 值。
帕金森氏症二至三期患者,於後腳跨越障礙物,用藥前與用藥後有顯著差異(P 值<0.05),如表 三-6。並且由平均值可看出,用藥後受試者於後腳跨越障礙物之 能量消耗權重值增加,足部間隙的權重值降低。
表 三-6 PD-II&III 組後腳跨越用藥前(Off)與用藥後(On)之控制策略權重值平均(標 準差)與 P 值,(*)表示有顯著差異。
PD- II&III (Leading) Off On P value mean (std) mean (std)
Energy expenditure 0.51 (0.09) 0.61 (0.08) 0.049*
Toe Clearance 0.25 (0.05) 0.20 (0.04) 0.047*
Heel Clearance 0.25 (0.05) 0.20 (0.04) 0.047*
PD- II&III (Trailing) Off On P value mean (std) mean (std)
Energy expenditure 0.46 (0.05) 0.56 (0.08) 0.020*
Toe Clearance 0.27 (0.02) 0.22 (0.04) 0.021*
Heel Clearance 0.27 (0.03) 0.22 (0.04) 0.023*
3.5 前後腳跨越障礙物之控制策略比較
正常中老年人跨越障礙物時,前腳跨越與後腳跨越於控制策略權重值有顯著 差異(P<0.05),由平均值可知,前腳跨越有較大的能量消耗權重值,較小的足部間 隙權重值,如表 三-7。
表 三-7 Normal 組,前後腳跨越障礙物之控制策略權重值平均(標準差)與 P 值,(*) 表示有顯著差異。
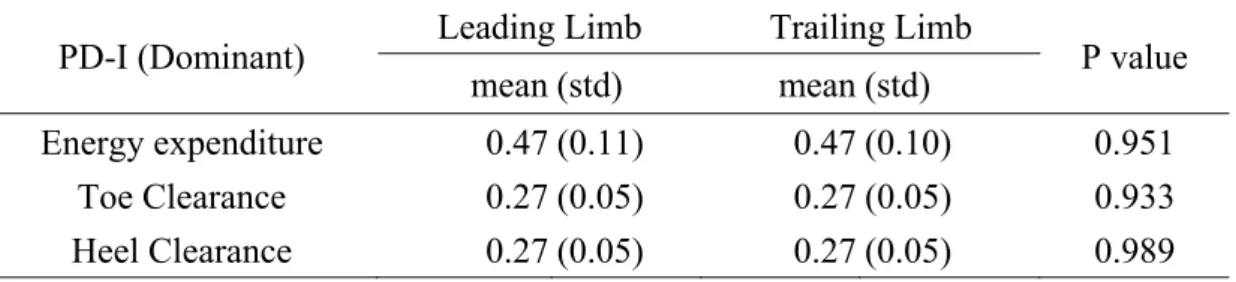
帕金森氏症第一期患者,健側跨越障礙物時,前後腳控制策略無顯著差異 (P>0.05),如表 三-8。
表 三-8 PD-I 組健側,前後腳跨越障礙物之控制策略權重值平均(標準差)與 P 值。
帕金森氏症第一期患者,患側跨越障礙物時,前後腳控制策略無顯著差異 (P>0.05),如表 三-9。
Normal Leading Limb Trailing Limb
P value mean (std) mean (std) Energy expenditure 0.54 (0.11) 0.49 (0.10) 0.045*
Toe Clearance 0.23 (0.05) 0.25 (0.05) 0.048*
Heel Clearance 0.23 (0.05) 0.25 (0.05) 0.048*
PD-I (Non-Dominant) Leading Limb Trailing Limb
P value mean (std) mean (std) Energy expenditure 0.48 (0.09) 0.52 (0.12) 0.117
Toe Clearance 0.26 (0.05) 0.24 (0.06) 0.107 Heel Clearance 0.26 (0.05) 0.24 (0.06) 0.137
![表 二-2 定義下肢各肢段局部座標系統之標記代號說明[34]。](https://thumb-ap.123doks.com/thumbv2/9libinfo/9601921.629107/23.892.128.770.245.763/表二2定義下肢各肢段局部座標系統之標記代號說明34.webp)