行政院國家科學委員會專題研究計畫 期末報告
軌道列車電力牽引系統運轉理論分析、量測、控制與改善- -總計畫及子計畫一:高運量捷運列車電力牽引系統運轉理
論分析與再生煞車能源轉換原理探討與量測
計 畫 類 別 : 整合型
計 畫 編 號 : NSC 101-2221-E-011-090-
執 行 期 間 : 101 年 08 月 01 日至 102 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學電機工程系
計 畫 主 持 人 : 陳南鳴 共 同 主 持 人 : 柯博仁
計畫參與人員: 學士級-專任助理人員:邱友辰
碩士班研究生-兼任助理人員:陳彥儒 碩士班研究生-兼任助理人員:邱信瑋 碩士班研究生-兼任助理人員:李泓震 碩士班研究生-兼任助理人員:劉進順 碩士班研究生-兼任助理人員:楊政和 碩士班研究生-兼任助理人員:彭柏志
報 告 附 件 : 出席國際會議研究心得報告及發表論文
公 開 資 訊 : 本計畫可公開查詢
中 華 民 國 102 年 10 月 30 日
中 文 摘 要 : 總計畫:本計畫整合對軌道機電系統有興趣之學者專家,探討 軌道列車電力牽引系統運轉理論分析、量測驗證、控制策略 與改善方法。涵蓋台鐵交流供電及台北捷運直流供電系統的 牽引電力系統問題。並規畫下列的研究主題:
(一)本子計晝由總計畫主持人台灣科技大學電機工程系陳南 鳴教授主持,進行「高運量捷運列車電力牽引系統運轉理論 分析與再生煞車能源轉換原理探討與量測」的研究。(二)本 子計畫由華夏技術學院電機工程系王文智教授主持,進行
「高效率軌道列車牽引馬達控制系統之分析與設計」的研 究。 (三)本子計晝由亞東技術學院電機工程系曾乙申副教授 主持,進行「捷運牽引電力能耗分析與既有設備下之省能方 案」的研究。(四)本子計晝由逢甲大學電機工程系黃思倫教 授主持,進行「臺灣鐵路列車系統設備用電分析與最佳運行 策略」的研究。原由台北科技大學電機工程系古碧源副教授 主持,進行「台鐵 EMU800 列車電力牽引系統之動態與暫態特 性量測暨檢驗」的研究因計畫審核未通過,所以不執行。透 過整合型計劃,研究人員會有較多的學術、實務及資訊交 流,可以快速提升人才培育績效,減少研究挫折,整合程度 甚佳。
子計畫一:本計畫利用 MATLAB/Simulink 建立單一列車耗電效 能模擬,列車系統是以捷運高運量電聯車為目標,依序完成 速度運行曲線模型、純量控制器模型、三種推進模式模型、
變頻器模型、第三軌電壓模型、交流感應馬達模型和負載模 型。列車模型使用具有回授功能的純量控制器(Variable Voltage Variable Frequency Control, VVVF Control)計算 目標轉速與馬達回授轉速的滑差以求得電機角頻率,再利用 頻率與電壓關係輸出電壓命令,並根據列車當下速率選擇適 合的推進模式以輸出變頻器開關切換訊號,再讓訊號傳至變 頻器的 IGBT 電子元件 (Insulated Gate Bipolar
Transistor, IGBT),將第三軌 DC750V 的電壓源轉換成相差 120 度的三相交流電,供感應馬達使用,透過馬達輸出的轉 速,計算列車在每個時間點的實際路段所需牽引力與阻力,
換算成力矩再回送給馬達。最後,利用實際路線資料及四種 運行模式(如:加速、等速、減速、滑行)進行研究分析。針 對列車運行速度、加速率、急衝度、總阻力、第三軌電壓與 電流及列車能耗做深入分析與討論。從案例模擬結果得知,
模擬結果皆符合電聯車規範所訂定的要求,而再生率約為
17%,如果能有效利用回收再生電能,將可節省營運成本,另
外,透過滑行模擬,滑行 10 秒僅多花費 1 秒鐘時間,但消耗
電能將可節省 6%以上,因此善用滑行模式確實可以節省電費
成本。
中文關鍵詞: 總計畫:電力牽引系統、再生煞車、馬達控制系統、省能方 案、台鐵列車用電分析、儲能設備、省能運行策略。子計畫 一:捷運、推進系統、列車模型、黏著係數
英 文 摘 要 : total project:This is an integrated project to gather scholars interested in railway electromechanical systems together to investigate the operation theory, measurement, control and improvement of the railway train electrical traction system. The topics of each subproject are:(1)'Mass rapid transit railway electric traction system operation theory and the energy conversion principle of regenerative brake'
conducted by Professor Nanming Chen of National Taiwan University of Science and Technology.
(2)'Analysis and design of a high-efficiency railway train traction motor control system' conducted by Professor Wen-Jieh Wang of Hwa Hsia Institute of Technology. (3)'The traction energy consumption analysis of Taipei Mass Rapid Transit Systems and energy-saving schemes for existing equipments of the system' conducted by Professor Yii-Shen Tzeng of Oriental Institute of Technology.(4) 'Taiwan
Railways train electrical system power analysis and optimization operation strategy' conducted by Professor Sy-Ruen Huang of Feng Chia University.
subproject1:A single train power performance
simulation based on MATLAB/Simulink is proposed in this study. The train type is the electric multiple unit of heavy-capacity in Taipei Mass Rapid Transit Systems. The speed model, scalar controller model, three kinds of propulsion mode models, inverter model, third rail voltage model and load model are built and verified in sequence. At first, a variable voltage variable frequency control (VVVF Control) is employed to calculate the electrical angular
frequency by optimal angular speed and motor feedback angular speed. The voltage command is calculated through the relationship of voltage and frequency. In the propulsion model, a suitable propulsion mode is selected according to the train speed and the
switching signals are calculated. Finally, from the
simulation results, three cases are all in compliance
with the EMU standard. Their regeneration rates are about 17%. If the regenerative energy can be
effectively used. In the coasting simulation of the third case, it is found that running time only takes a second more when the train coasts for 10 seconds and the power consumption can be saved by more than 6%.
英文關鍵詞: total project: MRT, propulsion system, train model,
adhesive coefficient. subproject1: MRT, propulsion
system, train model, adhesive coefficient.
行政院國家科學委員會補助專題研究計畫 □期中進度報告
■期末報告
總計畫:軌道列車電力牽引系統運轉理論分析、量測、控制與改善
計畫類別:□個別型計畫 ■整合型計畫 計畫編號:NSC 101-2221-E-011-090
執行期間:101 年 08 月 01 日至 102 年 07 月 31 日 執行機構及系所:國立台灣科技大學 電機工程系
計畫主持人:陳南鳴 共同主持人:柯博仁
計畫參與人員:邱友辰、邱信瑋、劉進順、彭柏志、陳彥儒、李泓震、楊政和
本計畫除繳交成果報告外,另須繳交以下出國報告:
□赴國外移地研究心得報告
□赴大陸地區移地研究心得報告
■出席國際學術會議心得報告及發表之計畫
□國際合作研究計畫國外研究報告
處理方式:除列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
中 華 民 國 102 年 09 月 03 日
中文摘要
本計畫整合對軌道機電系統有興趣之學者專家,探討軌道列車電力牽引系統運轉理論分析、量測驗 證、控制策略與改善方法。涵蓋台鐵交流供電及台北捷運直流供電系統的牽引電力系統問題。並規畫下 列的研究主題:
(一)本子計晝由總計畫主持人台灣科技大學電機工程系陳南鳴教授主持,進行「高運量捷運列車 電力牽引系統運轉理論分析與再生煞車能源轉換原理探討與量測」的研究。(二)本子計畫由華夏技術 學院電機工程系王文智教授主持,進行「高效率軌道列車牽引馬達控制系統之分析與設計」的研究。(三) 本子計晝由亞東技術學院電機工程系曾乙申副教授主持,進行「捷運牽引電力能耗分析與既有設備下之 省能方案」的研究。(四)本子計晝由逢甲大學電機工程系黃思倫教授主持,進行「臺灣鐵路列車系統設 備用電分析與最佳運行策略」的研究。原由台北科技大學電機工程系古碧源副教授主持,進行「台鐵 EMU800 列車電力牽引系統之動態與暫態特性量測暨檢驗」的研究因計畫審核未通過,所以不執行。透 過整合型計劃,研究人員會有較多的學術、實務及資訊交流,可以快速提升人才培育績效,減少研究挫 折,整合程度甚佳。
關鍵字:電力牽引系統、再生煞車、馬達控制系統、省能方案、台鐵列車用電分析、儲能設備、
省能運行策略
Abstract
This is an integrated project to gather scholars interested in railway electromechanical systems together to investigate the operation theory, measurement, control and improvement of the railway train electrical traction system. It covers the ac power supply used by Taiwan Railways Administration (TRA) and the dc power supply used in city rapid transit systems and light rail systems. The topics of each subproject are:
(1) “Mass rapid transit railway electric traction system operation theory and the energy conversion principle of regenerative brake” conducted by Professor Nanming Chen of National Taiwan University of Science and Technology. (2) “Analysis and design of a high-efficiency railway train traction motor control system”
conducted by Professor Wen-Jieh Wang of Hwa Hsia Institute of Technology. (3) “The traction energy consumption analysis of Taipei Mass Rapid Transit Systems and energy-saving schemes for existing equipments of the system” conducted by Professor Yii-Shen Tzeng of Oriental Institute of Technology. (4)
“Taiwan Railways train electrical system power analysis and optimization operation strategy” conducted by Professor Sy-Ruen Huang of Feng Chia University. “The dynamic and transient characteristics of TRA’s newly procured EMU800 train propulsion systems”. conducted by Professor Bih-Yuan Ku of National Taipei University of Technology, did not pass and subsequently was not processed.
Participants in this project will share their experiences and cooperate with each other to complete this project as well as to learn and train students effectively.
Keywords: electric traction system, regenerative brake, motor control system, energy-saving schemes, power supply equipments of TRA trains, energy storage facilities, energy saving strategy
目 錄
中文摘要
... IIAbstract
... III目 錄
...IV圖表索引
... V壹、緣由與目的
... 1貳、子計畫一 結果與討論
... 1參、子計畫二 結果與討論
... 9肆、子計畫三 結果與討論
... 16伍、子計畫四 結果與討論
... 21陸、總計畫結果與討論
... 27柒、參考文獻
... 28圖表索引
圖 1 捷運高運量編組 ... 1
圖 2 列車推進系統架構 ... 1
圖 3 推進系統模型架構圖 ... 2
圖 4 純量控制模型 ... 2
圖 5 頻率與電壓比 ... 2
圖 6 推進模式模型 ... 3
圖 7 總負載模型 ... 4
圖 8 總阻力模型 ... 4
圖 9 加速率及急衝度曲線圖 ... 6
圖 10 第三軌電壓及電流曲線圖 ... 7
圖 11 列車能耗與累積能量圖 ... 8
圖 12 間接磁場導向控制方塊圖 ... 9
圖 13 具蓄電池儲能裝置之軌道列車驅動系統方塊圖 ... 10
圖 14 基於模糊控制之軌道列車速度控制器結構圖[7] ... 10
圖 15 模糊控制器方塊圖[7] ... 10
圖 16 列車速度命令波形圖 ... 11
圖 17 不具電池儲能系統且負載為正常列車重量之軌道列車運行波形圖 ... 12
圖 18 不具電池儲能系統且負載為 90%正常列車重量之軌道列車運行波形圖... 12
圖 19 不具電池儲能系統且負載為 80%正常列車重量之軌道列車運行波形圖... 13
圖 20 不具電池儲能系統且負載為正常列車重量之軌道列車運行波形圖 ... 14
圖 21 不具電池儲能系統且負載為 90%正常列車重量之軌道列車運行波形圖... 15
圖 22 不具電池儲能系統且負載為 80%正常列車重量之軌道列車運行波形圖... 16
圖 23 站間列車牽引功率與再生煞車功率歷時圖 ... 17
圖 24 臺北捷運高運量系統之主變電站用電數據統計暨比較圖 ... 17
圖 25 臺北捷運中運量系統之主變電站用電數據統計暨比較圖 ... 18
圖 26 列車牽引力曲線圖 ... 19
圖 27 列車牽引效率曲線圖 ... 19
圖 28 列車推進電流限制值曲線圖 ... 19
圖 29 土城線延伸頂埔段牽引電力系統示意圖 ... 19
圖 30 土城線延伸頂埔段列車運行圖 ... 20
圖 31 系統總牽引能量、再生能量與回收能量歷時圖 ... 20
圖 32 EMU700 型電聯車預計量測之電路簡圖 ... 21
圖 33 TEMU1000 型電聯車預計量測之電路簡圖... 21
圖 34 南港到汐科路段,由上到下分別為電聯車速度(紅線為車速限制)、坡度、
牽引馬達功率、靜態變流器功率……….22
圖 35 汐科到南港路段,由上到下分別為電聯車速度(紅線為車速限制)、坡度、
牽引馬達功率、靜態變流器功率……….22
圖 36 同樂到宜蘭路段,由上到下分別為列車速度(紅線為車速限制)、坡度、二次測功率、 靜態變流器功率……….22
圖 37 樹林到桃園路段,由上到下分別為列車速度(紅線為車速限制)、坡度、二次測功率、 靜態變流器功率圖……….22
圖 38 向量控制系統之系統模組 ... 23
圖 39 列車馬達模組 ... 23
圖 40 速度命令訊號、DC-Link 之電流變化與馬達轉速圖... 24
圖 41 馬達在加速與減速時之電壓與馬達相位變化 ... 24
圖 42 速度命令訊號和馬達實際之轉速圖 ... 24
圖 43 牽引動力系統模組圖 ... 24
圖 44 直流鏈結之電壓與電流變化圖 ... 24
圖 45 牽引馬達在加速(上圖)與電軔(下圖)之電壓電流之變化圖... 24
圖 46 換流器與牽引馬達之模組 ... 25
圖 47 速度命令與馬達轉速模擬結果圖 ... 25
圖 48 馬達電壓、電流模擬結果圖 ... 25
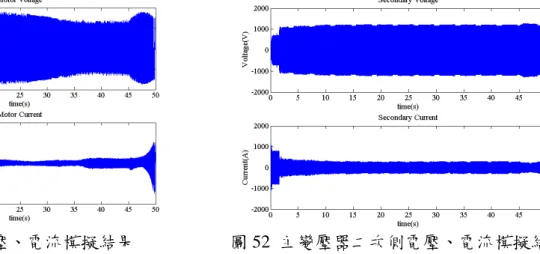
圖 49 TEMU1000 型電聯車動力牽引系統模型... 25
圖 50 速度命令與馬達轉速模擬結果對照圖 ... 25
圖 51 馬達電壓、電流模擬結果 ... 26
圖 52 主變壓器二次側電壓、電流模擬結果 ... 26
圖 53 列車速度與推進系統耗能對照圖 ... 26
圖 54 列車速度與再生煞車產生之能量對照圖 ... 26
表 1 主要之列車與牽引電力系統模擬參數 ... 18
表 2 TEMU1000 型電聯車樹林到桃園路段耗能資料表... 26
壹、緣由與目的
軌道運輸系統因為運輸效率高,節能減炭效果顯著,在全世界都在快速成長中。我國自台北捷運 開始興建以來,帶動軌道運輸系統蓬勃發展,陸續興建台北與高雄捷運多條路線,以及高速鐵路。甚 至台鐵也陸續推動花東鐵路電氣化、太魯閣號、普悠瑪號及南迴鐵路電氣化等多項建設計畫,氣象一 新。而國內從事軌道機電系統研究的教授較少,須凝聚各校教授的研究能量,才能產生較大的效益。
本計劃之總體目標擬探討軌道列車電力牽引系統運轉理論分析、量測驗證、控制 策略與改善方 法。涵蓋台鐵及台北捷運系統的牽引電力系統問題探討。透過整合型計劃,將能有效提昇參與研究人員 之專業技能。研究人員自然會有較多的學術、實務及資訊交流,得以分享經驗與知識,從而發揮個人專 長應用於此計畫。更可經由分工合作以收事半功倍之效,快速提升人才培育績效以及國內在軌道機電 系統方面的能力,也預期在未來,有更多的學術研究能貢獻於軌道機電系統領域。
貳、子計畫一 結果與討論
本計畫將利用 MATLAB/Simulink 的 SimPowerSystems 建立捷運列車推進系統的適當模型。其模型 將依序完成速度運行曲線模型、純量控制器模型、三種開關切換模式模型、換流器模型、第三軌電壓 模型、交流感應馬達模型和負載模型。最後,將利用實際路線資料及四種運行模式(如:加速、等速、
減速、滑行)進行研究分析。針對列車運行速度、加速率、急衝度、總阻力、第三軌電壓與電流及列 車能耗做深入分析與討論。
高運量列車由兩組六節車廂所組成,列車編組如圖 1 所示,由駕駛馬達車、拖車及馬達車三節車 廂構成一組電聯車(Electric Multiple Unit , EMU),再由兩組 EMU 構成一列車。每部馬達車均有 2 套獨 立的 VVVF 換流器與 4 顆牽引馬達,因此整列車有 8 套各自獨立的換流器與 16 顆牽引馬達。每個換流 器控制兩個牽引馬達,藉由換流器內部 IGBT(Insulated Gate Bipolar Transistor)的高頻切換,將第三 軌的直流 750V 電源轉換成交流電供應牽引馬達使用。
圖 1 捷運高運量編組
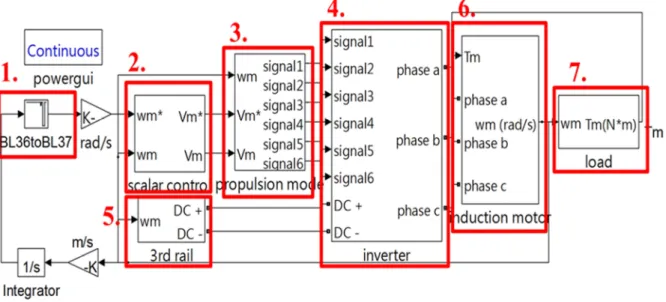
本計畫利用 MATLAB/Simulink 軟體建立捷運列車電力推進系統模型,藉以模擬列車的實際運行 狀況,分析列車耗能相關研究,該模型包含純量控制器、推進模式、換流器、第三軌、感應馬達及負 載等模組。圖 2 所示為捷運列車電力推進系統架構[1-5]。
圖 2 列車推進系統架構
圖 3 為本計畫利用 Simulink 所建立的列車推進系統模型,編號 1 至 7 分別為速度運行曲線模組、
純量控制器模組、三種推進模組、換流器模組、第三軌電壓模組、交流感應馬達模組和負載模組。
圖 3 推進系統模型架構圖
本計畫為模擬實際列車情形而採用純量控制法。純量控制根據轉速命令調整輸出頻率,為了控制 轉速與轉矩,必須同時調整輸出電壓大小,使馬達磁通獲得最高運轉效率。圖 4 為本計畫設計具有回 授控制的純量控制模組,此控制器可透過回授功能即時追蹤速度命令,且透過加減速率控制,以滿足 列車規範的要求,也能避免列車在運行過程中產生空轉或打滑。首先,將運行曲線的速度命令轉換成 目標轉子角頻率,再和回授轉子角頻率做調整與修正,以輸出一三相正弦波電壓命令,供推進模組做 進一步的控制,達到運行曲線速度。其中紅框實線為加速率與黏著力的控制。圖 5 為電壓與頻率的關 係曲線,當電源頻率升高時,電壓振幅將隨之升高;當超過額定頻率 57Hz 時,電壓振幅將固定不變,
只有透過增加頻率來補足電壓的不足,此概念即為 VVVF 控制。
圖 4 純量控制模型
本計畫所研究列車的開關切換模式,依照不同列車速度範圍分為三種控制方式,於 0-22 km/h 使 用 SPWM 控制,22-42 km/h 使用 Quasi Six-step 控制,42 km/h 以上使用 Six-step 控制。圖 6 為本研究 設計之推進模組,在模組中的 Choosing Control 方塊依照列車在不同速度範圍下,選擇適合的推進模 式。
圖 6 推進模式模型
本計畫因考量列車在不同時間及位置所受的阻力與牽引力,故需透過轉速計算馬達必須在下一個 時間產生多少轉矩以推動負載[2,3]。C301 高運量車組中共有 16 顆牽引馬達,本計畫假設每顆馬達平 均施力及受力,以一顆馬達等效整部列車推進系統所有馬達的特性。
牽引馬達的功率與機械力矩關係如式(1),表示目前牽引馬達的角頻率 (rad/s),如果要達到功率 (W),則需機械力矩 (N*m)。
= (1)
功率 (W)為當列車在速度 (m/s)的情況下,牽引馬達要推動牽引力和阻力所產生的負載力 (N)所需功 率,如式(2)。
= (2)
將式(2)代入式(1)即可得式(3)
= (3)
由式(3)的結果,可利用馬達的轉子角頻率,考慮每個時間點馬達所需承受的負載功率,求得所需
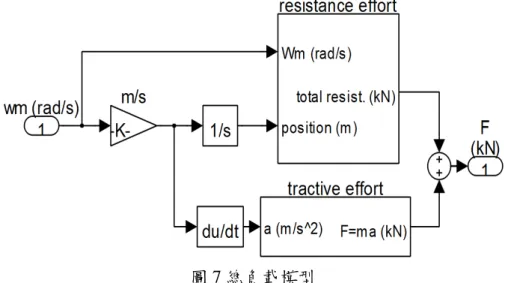
機械轉矩。本計畫利用此觀念建立總負載模型如圖 7 所示。
圖 7 總負載模型
列車阻力主要可分為兩部分,一為因列車行駛而產生的阻力,如:出發阻力、行駛阻力與加速阻 力;另一為受地形影響而產生的阻力,如:坡道阻力、彎道阻力。總阻力模型如圖 8 所示。
圖 8 總阻力模型
本計畫以板南線下行路段的新埔站(BL03)到江子翠站(BL04)實際線形資料進行模擬分析,並另外 加入在進站的滑行模式,進站前有 10 秒及 20 秒兩種滑行情形。
本計畫模擬對象為台北捷運高運量列車,在準備煞車進站前,皆以路線的最大速度限制運行,至 煞車進站時速度命令才降為零。
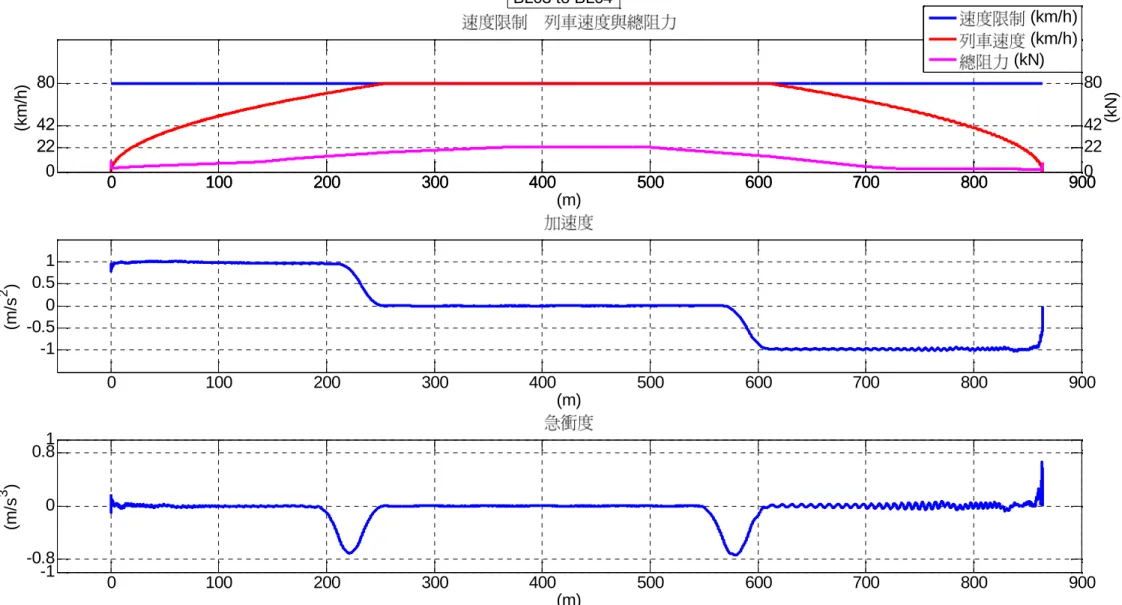
圖 9 的上圖為速度追蹤及總阻力曲線,橫軸單位為公尺,縱軸單位為 km/h 與 kN,藍線為路線速 度限制、紅線為列車模擬速度、紫線為列車運行總阻力。中圖為列車運行的加速率曲線,其值為列車 速度的微分,縱軸單位為 m/s
2。下圖為列車運行的急衝度曲線,為加速率的微分值,縱軸座標單位為 m/s
3。從上圖的紫線可發現此路段行駛總阻力變化不大,整個站間行駛時間 64 秒。此路段的最大加速 率 1.02 m/s
2,最小減速率-1.02 m/s
2,最大急衝度 0.68 m/s
3,最小急衝度-0.74 m/s
3。從模擬結果得知,
以本計畫建立列車模型進行模擬時,其加減速率與急衝度皆可符合捷運車輛規範的要求[6],且加減速 率皆控制在±1.58 m/s
2內,表示列車行駛過程中未發生任何空轉與打滑的現象。
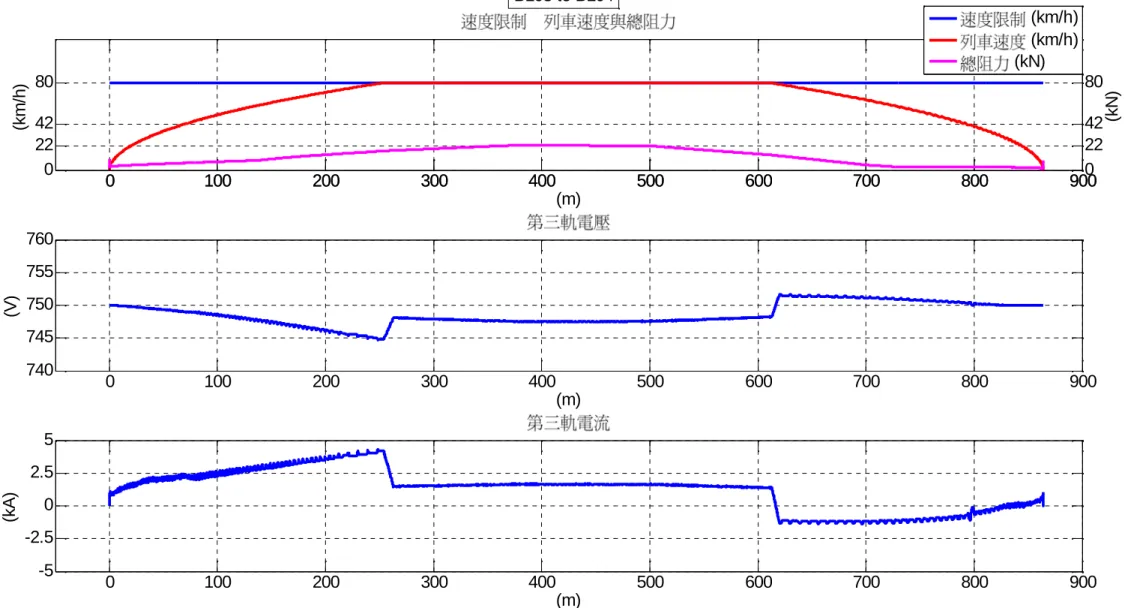
藉由第三軌模型,可觀察及分析列車運行的電壓電流變化,台北捷運第三軌電壓採 DC750 V 供電。
圖 10 為第三軌電壓電流模擬結果,上圖為速度追蹤曲線,橫軸單位為公尺,縱軸單位為 km/h 與 kN,
藍線為路線速度限制、紅線為列車模擬速度、紫線為列車運行總阻力。中間圖為第三軌電壓曲線,縱
軸單位為 V。下圖為第三軌電流,縱軸單位為 kA。捷運高運量單一列車共有 16 顆馬達,本計畫列車
模擬假設 16 顆馬達均分阻力及平均出力。第三軌電流即單部列車總電流值,本計畫暫不考慮馬達串聯
及匹配因素,在平均施力與受力的條件下,整部列車總電流為單顆馬達的 16 倍。從模擬結果應證,第
三軌電壓電流變化和列車運行控制與總阻力息息相關。其中分為三個路段:加速、等速、減速。列車
出站時,速度命令為 80 km/h,因此列車必須加速,此時第三軌電流流向列車,使得第三軌電壓下降,
直到列車做等速控制時,第三軌電壓才漸漸回復至接近 750 V。等速時列車不斷加減速以維持定速。準 備進站時列車開始煞車,電流方向由列車流向第三軌,導致第三軌電壓上升。全部路段的第三軌最大 電壓 752 V,最小電壓 744 V,皆在第三軌安全電壓 650-900V 範圍內。當第三軌電流為負,電流方向 由列車流向第三軌電源端,表示列車產生的再生電能回送至第三軌,將導致第三軌電壓會高於 750V;
反之,當馬達消耗電能,電流由第三軌電源端流向列車,第三軌電壓小於 750V。在列車維持等速或減 速運行時,可以明顯觀察第三軌電流為負,此時為再生煞車所造成。第三軌電流最大值 4.3 kA,最小 值為-1.4 kA。
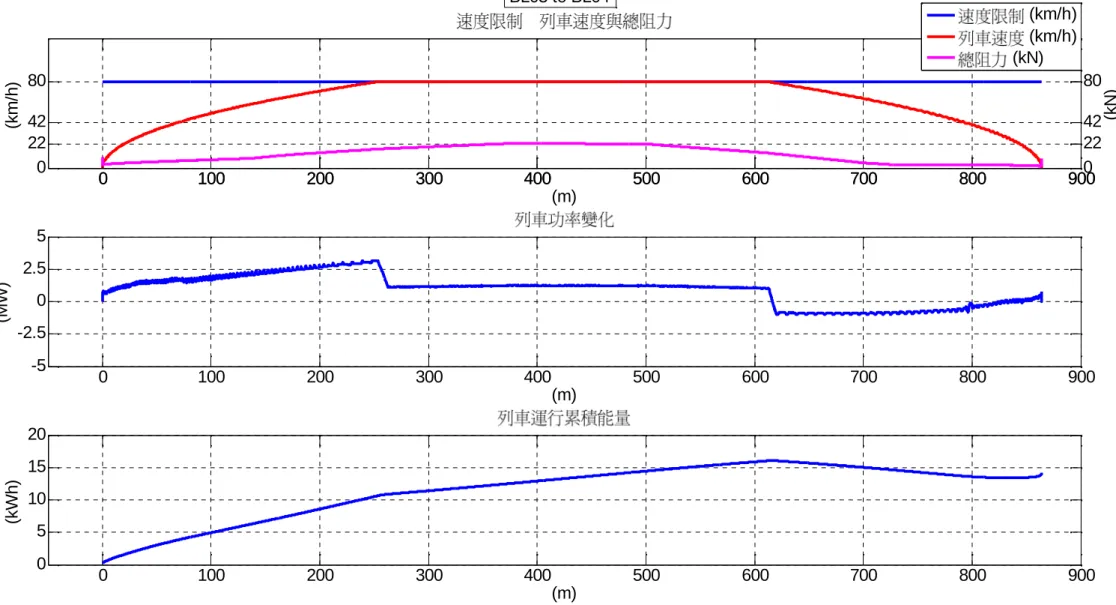
透過第三軌電壓電流模擬結果,可進一步分析運行功率及能量變化,圖 11 為列車功率變化與累積 能量圖。上圖為速度追蹤曲線,橫軸單位為公尺,縱軸單位為 km/h 與 kN,藍線為路線速度限制、紅 線為列車模擬速度、紫線為列車運行總阻力。中圖為列車運行功率變化,單位為 MW,列車輸出額定 功率為 2.387 MW。下圖為列車運行累積耗能,縱座標單位為 kWh。列車出站後處於加速階段,馬達 耗能以產生牽引力帶動列車加速,此時運行累積能耗曲線隨著時間持續上升,斜率為正。進入等速後,
因微許坡度阻力使能耗上升,相對加速階段能耗較小。牽引馬達只需少量牽引力即可推進列車,此時 所需功率下降,能量曲線也漸漸平緩,斜率由正趨向零。在減速進站後,列車使用電力煞車產生再生 電能,能耗累積也逐漸下降。列車以電力煞車維持等速,因此產生再生電能,使得能耗曲線下降,斜 率由正轉為負。此路段運行總消耗電能 16 kWh,回收電能 3 kWh,再生率為 17%。前述數值未考慮熱 能及線路損失。因此若能有效利用再生電能,將可節省營運成本。
本計畫利用板南線下行路段站間實際線形資料做模擬。從案例模擬結果得知,速度控制方面相當 成功,皆可符合捷運車輛規範的加速率與急衝度的要求,也避免空轉與滑行的發生。從第三軌的電壓 與電流變化,觀察列車在運行路段的加速、定速及減速的用電狀況。進一步計算列車的功率變化與能 耗累積曲線,可更清楚地觀察列車在實際路線運行的使用狀況。透過能耗累積曲線圖,能分析列車在 哪個路段需要消耗較多能量及在哪個路段可產生較多的再生電能,以提供日後規劃軌旁儲能裝置位置 的參考。此案例的再生回收率約為 17%,如果能有效利用回收再生電能,將可節省營運成本。另外,
透過滑行模擬,滑行 10 秒僅多花費 1 秒鐘時間,但消耗電能可節省 6%以上,因此善用滑行模式確實
可以節省電費成本。
圖 9 加速率及急衝度曲線圖
0 100 200 300 400 500 600 700 800 900
0 22 42 80
、
(m)
(km/h)
0 100 200 300 400 500 600 700 800 9000
22 42 80
(kN)
(km/h) (km/h) (kN)
0 100 200 300 400 500 600 700 800 900
-1 -0.5 0 0.5 1
(m) (m/s2 )
0 100 200 300 400 500 600 700 800 900
-0.8-1 0 0.81
(m) (m/s3 )
BL03 to BL04
圖 10 第三軌電壓及電流曲線圖
0 100 200 300 400 500 600 700 800 900
0 22 42 80
、
(m)
(km/h)
0 100 200 300 400 500 600 700 800 900 0
22 42 80
(kN)
(km/h) (km/h) (kN)
0 100 200 300 400 500 600 700 800 900
740 745 750 755 760
(m)
(V)
0 100 200 300 400 500 600 700 800 900
-5 -2.5 0 2.5 5
(m)
(kA)
BL03 to BL04
圖 11 列車能耗與累積能量圖
0 100 200 300 400 500 600 700 800 900
0 22 42 80
、
(m)
(km/h)
0 100 200 300 400 500 600 700 800 900 0
22 42 80
(kN)
(km/h) (km/h) (kN)
0 100 200 300 400 500 600 700 800 900
-5 -2.5 0 2.5 5
(m)
(MW)
0 100 200 300 400 500 600 700 800 900
0 5 10 15 20
(m)
(kWh)
BL03 to BL04
參、子計畫二 結果與討論
本計畫分析與設計一高效率與強健性之軌道列車牽引馬達控制法則,並應用於軌道列車控制系統。
首先,本計畫依據激磁電流命令與轉矩電流命令之乘積,並配合負載之變化,調整激磁電流命令之大 小,達成最小的穩態功率損失。同時,在場導控制的狀態下,感應馬達的轉子磁通大小及轉速係可以 分別獨立控制的。雖可使用比例積分微分控制器,以控制感應馬達的轉速,惟因感應馬達的轉速易受 馬達參數與負載變動的影響,故本計畫使用智慧型控制法則以控制感應馬達之轉速,使得轉速控制系 統具有強健性。
在本計畫中,我們使用間接磁場導向控制法以控制感應馬達之轉速,其結構圖如圖 12 所示。
圖 12 間接磁場導向控制方塊圖
軌道列車的主要推進動力為牽引馬達,而負載則為列車的本身車重、搭載乘客、摩擦與坡度阻力 等。列車的行駛阻力包含基本阻力,
Fba,與附加阻力,
Fex,基本阻力可分為滾動阻力與空氣阻力,
滾動阻力又可細分為啟動阻力、輪軸間滾動摩擦阻力、滑動摩擦阻力、軸承摩擦阻力、衝擊力和震動 阻力等,上述阻力,會因為列車的種類與速度的不同而有所變化;空氣阻力,與列車行駛速率和列車 截面積,當列車速度愈高時,其空氣阻力愈大。
在本計畫中,軌道列車之運動方式可分為三種模式,分別是:加速模式、滑行模式、再生煞車模 式。
在列車運行時,再生煞車所產生的能量,係經由第三軌或架空線傳輸回輸電線,再轉移至軌道上 的其他列車使用;若軌道上無其他列車,則須將再生煞車所產生的電流,經由列車配置的電阻消耗。
由於流經電阻消耗較不具經濟性,故列車可加裝電池儲能裝置,將再生煞車所產生的電能回收儲存,
在適當的時機釋放電能供列車使用,以達到更好之經濟效益。圖 13 所示即為具蓄電池儲能裝置之軌道
列車驅動系統方塊圖。
控制開關
蓄電池 DC/DC 轉換器
DC/AC 換流器 DC Bus
感應 馬達
圖 13 具蓄電池儲能裝置之軌道列車驅動系統方塊圖
因傳統之多段式 PID 控制法則,可能造成系統之穩態誤差及延長系統之反應時間,故本計畫設計 模糊控制法則作為軌道列車之速度控制器,以減小系統之穩態誤差及縮短系統之反應時間,改善速度 突波或轉矩突波效應。其軌道列車速度控制器之結構圖如圖 14 所示,模糊控制器之方塊圖則如圖 15 所示。
圖 14 基於模糊控制之軌道列車速度控制器結構圖[7]
圖 15 模糊控制器方塊圖[7]
在本計畫之模擬中,軌道列車的起始速度為 0 公里/小時(KPH),經由轉換為感應馬達轉速命令 0 弳/秒(rad/sec),軌道列車速度加速上 80 公里/小時(KPH),等效為感應馬達轉速命令 350 弳/秒
(rad/sec) ,然後以時速 80 公里/小時(KPH)等速滑行 15 秒鐘,軌道列車再減速至 0 公里/小時(KPH),
整個模擬的列車運行時間為 60 秒鐘,其列車速度命令波形如圖 16 所示。
圖 16 列車速度命令波形圖
同時,本計畫之模擬對象為淡水線高運量捷運系統,其推進模式有三種,即脈波寬度調變(Pulse Width Modulation),工作於 0 至 22 公里/小時;準六步方波(Quasi Six Step),工作於 22 至 42 公里/小時;
與六步方波(Six Step),工作於 42 公里/小時以上[8];亦即配合列車速度,切換不同的感應馬達驅動方 式。圖 17 所示為不具電池儲能系統且負載為 100%正常列車重量之軌道列車運行波形圖,圖 18 所示為 不具電池儲能系統且負載降為 90%正常列車重量之軌道列車運行波形圖,圖 19 所示為不具電池儲能系 統且負載降為 80%正常列車重量之軌道列車運行波形圖,由圖 17、圖 18 與圖 19 之比較可知:本計畫 研提之基於最小穩態功率損失之激磁電流命令配合軌道列車之模糊速度控制器,不但可有效降低第三 軌電壓,而且可改善軌道列車之速度響應,降低速度突波或轉矩突波效應,提高乘客舒適性。
(a)
列車速度波形圖 (b) 第三軌電壓波形圖
(c) 供應電能波形圖 (d) d 軸電流波形圖
0 10 20 30 40 50 60
0 10 20 30 40 50 60 70 80 90
Time(sec)
Speed(KPH)
Train Speed Command
0 10 20 30 40 50 60
0 10 20 30 40 50 60 70 80 90
Train Speed without Battery
Time(sec)
Speed(KPH)
0 10 20 30 40 50 60
0 200 400 600 800 1000 1200
DC Link Voltage without Battery
Time(sec)
DC Link Voltage(V)
0 10 20 30 40 50 60
0 5 10 15 20 25 30 35
Supply Energy without Battery
Time(sec)
Energy(MJ)
0 10 20 30 40 50 60
0 50 100 150
d-axis Current without Battery
Time(sec)
Current(A)
(e) 感應馬達轉速波形圖 (f) 感應馬達功率波形圖 圖 17 不具電池儲能系統且負載為正常列車重量之軌道列車運行波形圖
(a) 列車速度波形圖 (b) 第三軌電壓波形圖
(c) 供應電能波形圖 (d) d 軸電流波形圖
(e) 感應馬達轉速波形圖 (f) 感應馬達功率波形圖
圖 18 不具電池儲能系統且負載為 90%正常列車重量之軌道列車運行波形圖
0 10 20 30 40 50 60
0 50 100 150 200 250 300 350 400
Motor Speed without Battery
Time(sec)
Motor Speed(rad/sec)
0 10 20 30 40 50 60
-4 -2 0 2 4 6 8
10x 104 Motor Power without Battery
Time(sec)
Power(W)
0 10 20 30 40 50 60
0 10 20 30 40 50 60 70 80 90
Train Speed without Battery
Time(sec)
Speed(KPH)
0 10 20 30 40 50 60
0 200 400 600 800 1000 1200
DC Link Voltage without Battery
Time(sec)
DC Link Voltage(V)
0 10 20 30 40 50 60
0 5 10 15 20 25 30 35
Supply Energy without Battery
Time(sec)
Energy(MJ)
0 10 20 30 40 50 60
0 50 100 150
d-axis Current without Battery
Time(sec)
Current(A)
0 10 20 30 40 50 60
0 50 100 150 200 250 300 350 400
Motor Speed without Battery
Time(sec)
Motor Speed(rad/sec)
0 10 20 30 40 50 60
-4 -2 0 2 4 6 8
10x 104 Motor Power without Battery
Time(sec)
Power(W)
(a) 列車速度波形圖 (b) 第三軌電壓波形圖
(c) 供應電能波形圖 (d) d 軸電流波形圖
(e) 感應馬達轉速波形圖 (f) 感應馬達功率波形圖
圖 19 不具電池儲能系統且負載為 80%正常列車重量之軌道列車運行波形圖
另外,圖 20 所示為具有電池儲能系統且負載為 100%正常列車重量之軌道列車運行波形圖,圖 21 所示為具有電池儲能系統且負載降為 90%正常列車重量之軌道列車運行波形圖,圖 22 所示為具有電池 儲能系統且負載降為 80%正常列車重量之軌道列車運行波形圖,由圖 20、圖 21 與圖 22 之比較可知:
本計畫研提之基於最小穩態功率損失之激磁電流命令配合軌道列車之模糊速度控制器與電池儲能系統,
除可有效降低第三軌電壓,而且可改善軌道列車之速度響應,降低速度突波或轉矩突波效應,提高乘 客舒適性。本計畫研提之基於最小穩態功率損失之激磁電流命令配合軌道列車之模糊速度控制器與電 池儲能系統,碓實可有效減少列車系統之能源消耗 5.6%至 7.5%。
0 10 20 30 40 50 60
0 10 20 30 40 50 60 70 80 90
Time(sec)
Speed(KPH)
Train Speed without Battery
0 10 20 30 40 50 60
0 200 400 600 800 1000 1200
DC Link Voltage without Battery
Time(sec)
DC Link Voltage(V)
0 10 20 30 40 50 60
0 5 10 15 20 25 30 35
Supply Energy without Battery
Time(sec)
Energy(MJ)
0 10 20 30 40 50 60
0 50 100 150
d-axis Current without Battery
Time(sec)
Current(A)
0 10 20 30 40 50 60
0 50 100 150 200 250 300 350 400
Motor Speed without Battery
Time(sec)
Motor Speed(rad/sec)
0 10 20 30 40 50 60
-4 -2 0 2 4 6 8
10x 104 Motor Power without Battery
Time(sec)
Power(W)
(a) 列車速度波形圖 (b) 第三軌電壓波形圖
(c) 供應電能波形圖 (d) d 軸電流波形圖
(e) 感應馬達轉速波形圖 (f) 感應馬達功率波形圖
圖 20 具電池儲能系統且負載為正常列車重量之軌道列車運行波形圖
(a) 列車速度波形圖 (b) 第三軌電壓波形圖
0 10 20 30 40 50 60
0 10 20 30 40 50 60 70 80 90
Train Speed with Battery
Time(sec)
Speed(KPH)
0 10 20 30 40 50 60
0 200 400 600 800 1000 1200
DC Link Voltage with Battery
Time(sec)
DC Link Voltage(V)
0 10 20 30 40 50 60
0 5 10 15 20 25 30 35
Supply Energy with Battery
Time(sec)
Energy(MJ)
0 10 20 30 40 50 60
0 50 100 150
d-axis Current with Battery
Time(sec)
Current(A)
0 10 20 30 40 50 60
0 50 100 150 200 250 300 350 400
Time(sec)
Motor Speed(rad/sec)
Motor Speed with Battery
0 10 20 30 40 50 60
-4 -2 0 2 4 6 8 10x 104
Time(sec)
Power(W)
Motor Power with Battery
0 10 20 30 40 50 60
0 10 20 30 40 50 60 70 80 90
Train Speed with Battery
Time(sec)
Speed(KPH)
0 10 20 30 40 50 60
0 200 400 600 800 1000 1200
DC Link Voltage with Battery
Time(sec)
DC Link Voltage(V)
(c) 供應電能波形圖 (d) d 軸電流波形圖
(e) 感應馬達轉速波形圖 (f) 感應馬達功率波形圖
圖 21 具電池儲能系統且負載為 90%正常列車重量之軌道列車運行波形圖
(a) 列車速度波形圖 (b) 第三軌電壓波形圖
(c) 供應電能波形圖 (d) d 軸電流波形圖
0 10 20 30 40 50 60
0 5 10 15 20 25 30 35
Supply Energy with Battery
Time(sec)
Energy(MJ)
0 10 20 30 40 50 60
0 50 100 150
d-axis Current with Battery
Time(sec)
Current(A)
0 10 20 30 40 50 60
0 50 100 150 200 250 300 350 400
Motor Speed with Battery
Time(sec)
Motor Speed(rad/sec)
0 10 20 30 40 50 60
-4 -2 0 2 4 6 8
10x 104 Motor Power with Battery
Time(sec)
Power(W)
0 10 20 30 40 50 60
0 10 20 30 40 50 60 70 80 90
Train Speed with Battery
Time(sec)
Speed(KPH)
0 10 20 30 40 50 60
0 200 400 600 800 1000 1200
DC Link Voltage with Battery
Time(sec)
DC Link Voltage(V)
0 10 20 30 40 50 60
0 5 10 15 20 25 30 35
Supply Energy with Battery
Time(sec)
Energy(MJ)
0 10 20 30 40 50 60
0 50 100 150
d-axis Current with Battery
Time(sec)
Current(A)
(e) 感應馬達轉速波形圖 (f) 感應馬達功率波形圖 圖 22 具電池儲能系統且負載為 80%正常列車重量之軌道列車運行波形圖
肆、子計畫三 結果與討論
本計畫進行捷運牽引電力能耗與既有設備下之省能方案的相關課題研究,執行期間將就電腦模擬 與現場量測兩部份交叉進行。本計畫首先將由捷運主變電站、牽引動力變電站與列車三方面,進行相 關用電變量的量測,藉此瞭解臺北捷運系統之牽引用電特性。接著經由系統既有用電特性的分析,研 擬可行的省能策略,並利用電腦模擬評選較優之方案,進行實體系統之改善作業。
本計畫擬提出之省能策略,將朝降低列車加速功率、增加再生煞車功率、提高再生煞車功率回收 率,以及減少供電設備與線路之功率損失四方面進行思考。
(一)降低列車加速功率
有效規劃列車操作模式,避免進行不必要的加速。列車最高營運速度對列車功率消耗的峰值,有 最決定性的影響。因此將部分車站的列車駐站時間縮短,同時降低下一行車區間的最高速度。在運轉 時分容許的情況下,儘量延長滑行距離,節省列車牽引電力的使用。規劃適當列車之加速曲線,使加 速度隨速度之增加而遞減,降低列車功率消耗的峰值。
(二)提高列車再生煞車功率(能量)
列車煞車初始速度越高,可再生的能量越高,惟此舉將縮短滑行的距離,並增加等速行駛的距離,
導致牽引能量的略為增加。故,兼顧最低牽引能量及最高再生能量的最佳煞車時間,應經由電腦模擬 確認。
(三)改善再生功率回收率
適當的就車載控制器調整臨界電壓值,可擴大再生功率的應用範圍。同時,可藉助電腦模擬有效 地規劃時刻表,使同一供電區內的加速與煞車列車平均分佈,提高列車再生電力的使用率,並降低牽 引用電尖峰。再者,降低牽引動力變電站之輸出電壓(如:改變主變電站及/或牽引動力變電站牽引變 壓器之分接頭位置),亦可增加列車再生功率之回收率。
(四)減少設備與線路之功率損失
減少供電設備與線路損失可由各牽引動力變電站(TSS)之負載均化(負載轉移)著手。線路損失與流 過的電流平方成正比,透過負載均化,可將重載之牽引動力變電站的尖峰電流削平,轉移給較輕載之 變電站,如此系統整體之線路損失,將可獲得有效的改善,且亦有助於導電軌之供電電壓品質,避免 列車因電壓過低而降階運轉,影響旅客運輸之營運績效。
為觀察台北捷運列車之再生能量回收率多寡,本研究於某高運量路線之末端單邊供電的TSS架設 波形記錄器,測量該TSS F盤直流饋線上之匯流排電壓與饋線電流,並由此獲得不計線路損失的列車功 率。測量當時之列車班距約為6分鐘。由於受測TSS之F盤直流饋線係以單端供電方式供應行駛於路線 末端兩車站(A站與B站)間之下行軌列車牽引電力。因此於該TSS之F盤所測得之正值功率,幾乎為該直 流饋線所供電之兩站下行軌間單一列車的牽引功率,所測得之負值功率則為列車饋入供電系統之再生
0 10 20 30 40 50 60
0 50 100 150 200 250 300 350 400
Motor Speed with Battery
Time(sec)
Motor Speed(rad/sec)
0 10 20 30 40 50 60
-4 -2 0 2 4 6 8
10x 104 Motor Power with Battery
Time(sec)
Power(W)
功率。
圖 23 所示為測量期間某一列車經下行軌往返於兩車站間之牽引功率與再生功率歷時圖。圖 23(a) 顯示,該列車自 A 站(路線末端到數第二站)出站後加速前進,列車自供電系統汲取牽引功率經統計,
該列車於 A 站與 B 站之間的牽引能量為 56.28 MJ、再生煞車能量為 23.79 MJ,列車饋入供電系統之再 生能量與列車汲取之牽引能量的比值(即再生能量回收率)為 42.27%。
列車抵達 B 站後,駐車約 5 分 25 秒,再度經下行軌駛回 A 站。圖 23(b)顯示,該列車自 B 站出站 後約 18 秒,汲取最大功率 5.325 MW,約於 65 秒後抵達 A 站。經統計,該列車於 B 站與 A 站之間的 牽引能量為 60.36 MJ、再生煞車能量為 12.45 MJ,站間之再生能量回收率僅 20.62%。
(a) 列車自A站經下行軌至B站 (b) 列車自B站經下行軌至A站
圖23 站間列車牽引功率與再生煞車功率歷時圖
經由本量測案例可以發現,在列車班距6分鐘的營運情況下,某列車於A站與B站下行軌間之再生 能量回收率係介於20 %至42 %之間。由於回收率與班距長短大致成反比例關係[9],因此在目標年2分 鐘班距的情況下,回收率將介於40 %至80 %之間。
捷運系統之用電可分為列車牽引動力用電與場站固定設施用電兩部份。列車牽引動力用電提供主 線與機廠區之電聯車行駛與車上空調及照明使用。
圖24所示為臺北捷運高運量系統淡水線、新店線、中和線及板南線共七個主變電站於2011 年1月至11月的用電數據統計暨比較圖,圖中數據由臺北捷運公司營運單位提供。經統計,上 述七個主變電站的總牽引用電量為151.520百萬度、總固定設施用電量為217.513百萬度,即列 車牽引動力用電與固定設施用電約各佔總用電量的41.1 %與58.9 %。
(a) 牽引用電度數與固定設施用電度數 (b) 牽引用電度數與固定設施用電量比率 圖24 臺北捷運高運量系統之主變電站用電數據統計暨比較圖
華捷 投捷 秀捷 興捷 新復捷 義捷 土捷
0 10 20 30 40 50 60 70
固定設施用電牽引用電
用電度數(百萬度)
主變電站
67.6 40.9 69.3 53.5 57 63.3 62.4
32.4 59.1 30.7 46.5 43 36.7 37.6
華捷 投捷 秀捷 興捷 新復捷 義捷 土捷
0 10 20 30 40 50 60 70 80
用電量比率(%)
主變電站
固定設施用電 牽引用電
圖25所示為臺北捷運中運量系統文湖線共四個主變電站於2011年1月至12月的用電數據統計暨比 較圖,圖中數據亦由臺北捷運公司營運單位提供。經統計,上述四個主變電站的總牽引用電量為55.267 百萬度、總固定設施用電量為40.048百萬度,即列車牽引動力用電與固定設施用電約各佔總用電量的 58.0 %與42.0 %。中運量系統之牽引動力及場站固定設施用電比率(6:4),與高運量的數據(4:6)恰好 相反。
(a) 牽引用電度數與固定設施用電度數 (b) 牽引用電度數與固定設施用電量比率
圖25 臺北捷運中運量系統之主變電站用電數據統計暨比較圖
本計畫就土城線延伸頂埔段系統(BL36~BL04),分別以既有的供電系統架構、列車特性、
發車時刻表、功能位階與再生與動態煞車操作準則等,進行牽引用電模擬,瞭解該路線系統未 實施省能策略前牽引用電能耗情況與牽引用電特性,提供各項省能方案研擬的參考。本研究計 畫所進行之牽引用電能耗模擬,係以計畫主持人先前開發之捷運供電系統模擬軟體DCRAIL[10]
為基礎,針對本計畫之需要增修程式之分析功能,以進行各項省能策略的電腦模擬。
表1所示為土城線延伸頂埔段系統牽引電力系統模擬所採用之列車與牽引電力系統主要模 擬參數。
表1 主要之列車與牽引電力系統模擬參數
復捷 木捷 湖捷 內湖機廠
0 5 10 15 20 25 30
固定設施用電牽引用電
用電度數(百萬度)
主變電站
30.56 41.65 45.13 47.59
69.44 58.35 54.87 52.41
復捷 木捷 湖捷 內湖機廠
0 10 20 30 40 50 60 70 80
用電量比率(%)
主變電站
固定設施用電 牽引用電
項目 參數 輸入值
1 列車空車重量(W1) 237.3 ton 2 列車總重(W3) 352.1 ton 3 列車旋轉重量 18 ton
4 列車輔助電力負載 448 kW (560 kVA, PF=0.8) 5 列車牽引力曲線圖(W3) 詳圖26
6 列 車 牽 引 效 率 曲 線 圖
(W3) 詳圖27
7 列車推進電流限制值曲
線 詳圖28
8 牽引電力系統架構 詳圖29
9 列車最高速度 80 km/hr (即 PL1 功能位階) 10 列車最大加速度 1.0 m/s
2(即 P4 加速階層) 11 列車最大運轉煞車率 1.0 m/s
2(即B6煞車階層) 12 車站停留時間 20秒
13 最小預定行車間距 2 分鐘,列車運行圖詳圖 30
14 行車準則 採全速運行,不考慮滑行。
15 再生與動態煞車操作準 則
線電壓低於 900V 時,全部再
生 煞 車 ; 線 電 壓 高 於 900V
時,全部動態煞車。
圖26 列車牽引力曲線圖(W3) 圖27 列車牽引效率曲線圖(W3)
圖28 列車推進電流限制值曲線圖
圖29 土城線延伸頂埔段牽引電力系統示意圖
圖30 土城線延伸頂埔段列車運行圖
圖 31 所示為 TSS 均正常供電狀況下,於系統收發車已達平衡狀態之 16 分鐘營運時段內,全系統 之總列車牽引能量、再生能量與回收能量之歷時圖。
圖31 系統總牽引能量、再生能量與回收能量歷時圖
綜整各項牽引電力省能方法,本計畫擬就下列較實際可行的方案進行後續的電腦模擬,並根據模 擬結果,選定省能效益與工程技術可行性較高的幾個方案,就實際系統施作改善策略。本計畫擬於後 續執行年度中進行效益評估的省能方案如下:
(1) 在不影響營運品質的情況下,適當調整每一列車之執行速限、滑行策略與功能位階,降低列車之 牽引電力。
(2) 提高列車再生煞車之起始速度,增加列車再生功率大小。
(3) 在不影響運量的情況下,適當調整列車班表,使列車再生功率得以被其他車輛有效利用。
(4) 適當調整發車時刻表,避免同一牽引動力變電站供電區內,多輛列車同時啟動,以降低變電站之 尖峰用電,減少線路損失。
(5) 利用調整主變電站變壓器或牽引動力變電站變壓器之分接頭位置,做大範圍或局部直流供電電壓 調降動作,藉此提高列車再生功率的再生率與回收率。
(6) 上、下行軌之鋼軌實施搭接,提高直流電壓調整率,減少供電設備與線路的功率損失。
(7) 適當調整各牽引動力變電站之輸出電壓,將重載之變電站的尖峰電流削平,轉移給較輕載之變電 站,降低系統整體之供電設備與線路損失。
(8) 在不影響列車推進設備安全與使用壽命的情況下,調高列車再生煞車的截止電壓,擴大再生煞車 功率的有效應用範圍,提高再生功率的再生率。
(9) 在無過載之虞的條件下,將負載較輕之牽引動力變電站並聯運行之兩組 12-脈波整流器組的其中一 組退出運行,提高利用率。
0 2 4 6 8 10 12 14 16
0 1000 2000 3000 4000 5000 6000 7000
2820 kWH 總列車需求能量
可供再生之總列車煞車能量 實際饋入供電系統之再生能量
能量 (kWH)
時間 (min)
6155 kWH
2218 kWH
![圖 7 推進模式模型 第一種為脈波寬度調變,如圖 8 所示。以下將介紹 SPWM 調變的步驟[16,30,31]: 1. 將純量控制器產生的正弦波電壓命令與三角波做比較,若正弦波大於三角波時,調變信號將會輸 出 1,反之為 0。三角波頻率需遠大於正弦波頻率,所以正弦波與三角波會有數個交點,圖 9 為 SPWM 開關切換訊號,上圖藍線為純量控制器所輸出的電壓命令,紅線為計畫假設的三角波,下 圖為電壓命令與三角波比較後所輸出的訊號。 2](https://thumb-ap.123doks.com/thumbv2/9libinfo/9123979.408513/49.892.126.775.86.538/推進模式模型一種為脈波寬度調變如所示以下將介調變步驟將純量控.webp)


![圖 20 總阻力模型 (A) 出發阻力模型 本計畫探討的列車為台北捷運 C301 型,使用滾柱軸承[17]。列車剛起步時,出發阻力發生於車速 約為 0 km/h 至 3 km/h,隨著車速增加,阻力線性下降,約在 3km/h 時,出發阻力會達最小值,當克服 出發阻力後,將接續行駛阻力。因此,設計一個轉接器,當車速低於 3km/h,則列車會受到出發阻力, 當車速大於 3km/h 時,則自動切換至行駛阻力,模型如圖 21 所示。 圖 21 出發阻力模型 (B) 行駛阻力模型 影響列車行駛阻力的因素](https://thumb-ap.123doks.com/thumbv2/9libinfo/9123979.408513/55.892.237.690.86.361/總阻力模A出發阻力模型本計畫探討列車為台北捷型使用滾柱軸車剛.webp)
