國立臺灣大學工學院機械工程學系 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
混合動力系統之耦合分析與評估 Coupling Analysis and Evaluation of
Hybrid Power Trains
汪鼎翔
TING-HSIANG WANG
指導教授:劉 霆 博士 Advisor: Tyng Liu, Ph.D.
中華民國 104 年 7 月
July, 2015
i
ii
銘謝
此碩士論文的完成首先要感謝劉霆教授這兩年來的指導與教誨,讓我在學 術領域及待人處事上都獲益良多。感謝口試委員尤正吉老師和蘇偉儁老師撥空 指導我的論文,提供寶貴的意見,使本論文更趨於完善。
感謝實驗室的各位,首先感謝學長彥翔的指導,讓我在研究上與各領域有 所學習。感謝實驗室的博班學長羿名、正平、昱帆、彥菘、柏緯的討論。感謝 博仁提供我論文撰寫與口試上的指導。感謝實驗室戰隊成員的正平、博仁、昱 帆、振逵、昱儒、小櫻等增添了生活的樂趣。感謝從碩一開始一起努力的夥伴 亮雄、淵堯以及明憲,在學習與研究的路上一起奮鬥。
最後感謝我的家人的培養與包容,因為你們無怨無悔地付出讓我得以順利 的完成碩士生涯。感謝鴻鴻這些日子來的陪伴,在碩士的生涯裡有你一起學習 與成長是我的福氣,也希望你的研究可以順利的進行。
iii
混合動力系統之耦合分析與評估
汪鼎翔
摘要
本研究之目的在於分析混合動力系統動力元件間相互耦合所產生之系統特 性,並評估各類混合動力系統效率,期望在選用或設計混合動力系統時選擇適 切的耦合方式以增進系統運作效率。本研究首先介紹混合動力系統之基本概念 與操作模式,並對混合動力系統之動力元件、系統負載與耦合機構進行分析。
接著由動力元件與系統負載間轉速與扭力關係進行動力系統分類。研究再針對 各類耦合方式對系統效能提升的差異進行分析,以車輛模擬軟體 ADVISOR 作 為分析工具,進行系統元件配置、參數設定以及系統控制策略設定,分析引擎 效率、能量傳遞途徑效率以及油耗表現,完整了解系統之特性。研究最後以一 個創新油電混合動力系統作為評估與分析案例,對此創新系統配置動力元件、
參數設定與控制策略設定,並與相似類型之混合動力系統進行比較。本研究分 析與評估混合動力系統特性,提供混合動力系統配置與設計時參考。
關鍵字:混合動力系統、耦合分析、功能動力圖、ADVISOR
iv
Coupling Analysis and Evaluation of Hybrid Power trains
WANG, TING-HSIANG
Abstract
The purpose of this study is to analyze the system characteristic of coupling multiple power unit in hybrid power trains and to evaluate the system efficiency of varies kind of powertrains. The goal is to identify the proper coupling type to enhance system efficiency. This study starts from introducing the conceptual hybrid system and its operation mode. Power unit, system loading and mechanical coupler in hybrid power train are analysis in detail. The power trains are then sort by the speed and torque relation between power unit and system loading. Using ADVISOR as the simulation tool, this research compare different kinds of hybrid power trains by their engine efficiency, transmission efficiency and fuel efficiency. Finally, a novel hybrid system is evaluated in this study. The novel hybrid system is simulated in ADVISOR and the system unit, design variable, control strategy is assigned. The novel hybrid system is compare with Toyota Hybrid System to fully understand the potential of this system. In this research, the characteristic of hybrid system is analyzed. The result could be a considerable consultation for design hybrid power trains.
Key words: hybrid power system, coupling analysis, function power graph, ADVISOR
v
目錄
摘要... iii
Abstract ... iv
目錄... v
縮寫對照表... xiv
符號彙編... xv
第一章 緒論... 1
1-1 前言... 1
1-2 文獻回顧... 2
1-2-1 混合動力系統分類... 2
1-2-2 混合動力系統分析... 5
1-3 研究動機與目的... 6
1-4 研究架構與步驟... 7
第二章 理論基礎... 8
2-1 機械耦合器類型與原理分析... 8
2-1-1 扭力耦合器... 8
2-1-2 轉速耦合器... 9
2-2 功能動力圖... 12
2-2-1 功能動力圖元件介紹... 12
2-2-2 功能動力圖表示車輛傳動系統... 15
2-3 車輛動力學... 16
第三章 混合動力系統特性分析... 18
3-1 混合動力系統基本概念... 18
3-2 耦合機構定性分析... 19
3-2-1 混合動力系統操作模式... 19
3-2-2 操作模式指標... 21
3-2-3 耦合機構有效性... 22
3-3 混合動力系統元件介紹... 23
vi
3-3-1 能量儲存元件... 23
3-3-2 動力元件... 23
3-3-3 系統負載... 26
3-3-4 WLTC 行車型態 ... 27
3-4 動力元件與系統負載間轉速扭力關係... 32
3-4-1 轉速固定比例、扭力固定比例關係... 33
3-4-2 轉速固定比例、扭力疊加關係... 34
3-4-3 轉速疊加、扭力固定比例關係... 34
3-4-4 轉速疊加、扭力疊加關係... 35
3-4-5 轉速無限制關係、扭力無限制關係... 36
3-5 構造圖合成與分類... 37
3-5-1 構造圖合成... 37
3-5-2 混合動力系統構造圖分類... 42
第四章 混合動力系統效率分析... 47
4-1 模擬分析工具... 47
4-1-1 ADVISOR 車輛模擬軟體 ... 48
4-1-2 ADVISOR 模擬流程 ... 49
4-2 混合動力系統配置與模擬... 49
4-2-1 配置元件介紹... 52
4-2-2 傳統引擎動力系統... 56
4-2-3 扭力耦合器動力系統... 59
4-2-4 轉速耦合器動力系統... 66
4-2-5 THS 混合動力系統 ... 67
4-2-6 串聯式動力系統... 76
4-3 小結... 81
第五章 新型混合動力系統模擬與分析... 82
5-1 新型油電混合動力系統... 82
5-1-1 耦合機構分析... 86
5-1-2 新型混合動力系統配置... 88
5-1-3 控制策略... 90
5-2 新型油電混合動力系統模擬... 91
5-2-1 系統建模... 91
5-3 模擬結果... 94
vii
5-3-1 WLTC 行車型態模擬結果 ... 94
5-3-2 電量充足行駛 ECE-15 行車型態 ... 96
5-3-3 電量不足行駛 ECE-15 行車型態 ... 100
5-4 小結... 103
第六章 結論... 104
6-1 結論... 104
6-2 未來展望... 105
參考文獻... 106
viii
圖目錄
圖 1-1 混合動力系統分類架構圖[6]... 4
圖 2-1 扭力耦合器示意圖 ... 8
圖 2-2 常見扭力耦合器[6]... 9
圖 2-3 轉速耦合器示意圖 ... 10
圖 2-4 常見轉速耦合器 ... 10
圖 2-5 行星齒輪作為轉速耦合器 ... 11
圖 2-6 THS 混合動力系統 ... 15
圖 2-7 THS 混合動力系統功能動力圖 ... 16
圖 2-8 行車阻力自由體圖 ... 16
圖 3-1 混合動力系統概念圖[20]... 19
圖 3-2 車載能源淨能量密度估計 [21]... 23
圖 3-3 典型汽油引擎特性圖 [22]... 24
圖 3-4 引擎效率等高線圖[23]... 24
圖 3-5 馬達分類[25]... 25
圖 3-6 典型馬達轉速扭力特性圖 ... 25
圖 3-7 各種類馬達效率趨勢圖[24] (a)表面黏貼型永磁馬達 (b)內部黏貼型永磁 馬達 (c)感應馬達 (d)磁阻馬達 (e)直流馬達 (f)同步有刷馬達 ... 26
圖 3-8 WLTC 行車型態[26] ... 27
圖 3-9 WLTC 行車型態速度分析 ... 29
圖 3-10 WLTC 行車型態車輪轉速與扭力分布圖 ... 29
圖 3-11 WLTC 行車型態功率需求 ... 30
圖 3-12 WLTC 單位距離消耗能量 ... 31
圖 3-13 使用某功率大小之發電機可回收煞車能量比例 ... 32
圖 3-14 A 型動力系統配置範例圖 ... 33
ix
圖 3-15 B 型動力系統配置圖範例... 34
圖 3-16 C 型動力系統配置範例圖... 35
圖 3-17 D 型動力系統配置範例圖 ... 36
圖 3-18 E 型動力系統配置範例圖 ... 37
圖 3-19 構造圖編號方式[18]... 38
圖 4-1 反向式模擬計算流程 ... 48
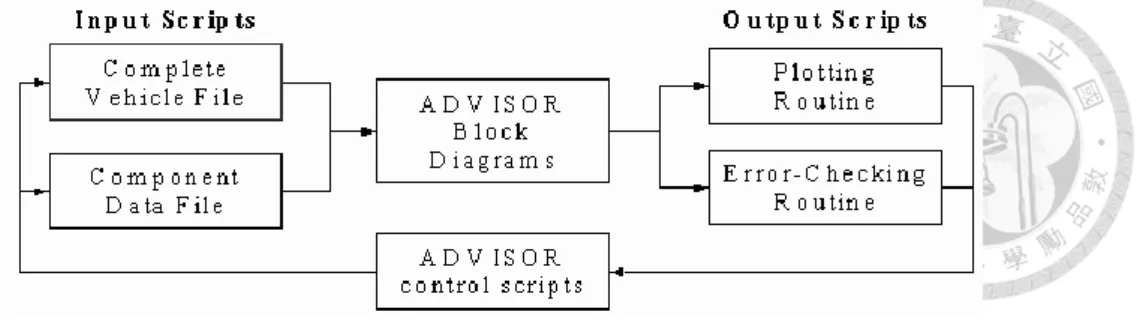
圖 4-2 ADVISOR 車輛模擬軟體資料傳遞路線 ... 49
圖 4-3 Toyota Prius 引擎特性曲線與效率等高線圖[23] ... 52
圖 4-4 馬達特性曲線與效率等高線圖[23]... 53
圖 4-5 發電機特性曲線與效率等高線圖[23]... 53
圖 4-6 25C 放電電池各 SoC 輸出功率 ... 54
圖 4-7 電池充放電電阻對電池 SOC[23] ... 54
圖 4-8 變速箱於第一檔位時效率等高線圖[37] ... 55
圖 4-9 傳統引擎動力系統功能動力圖 ... 56
圖 4-10 換檔控制方式[23]... 57
圖 4-11 傳統引擎驅動於 WLTC 行車型態引擎操作點,左上低速;右上中速; 左下高速;右下超高速 ... 57
圖 4-12 使用扭力耦合器之動力系統功能動力圖 ... 60
圖 4-13 電池電量充足與不足時引擎開啟/關閉時機[23] ... 61
圖 4-14 WLTC 行車型態引擎操作點,左上低速;右上中速;左下高速;右下超 高速 ... 62
圖 4-15 傳統引擎車與扭力耦合器動力系統引擎效率比較 ... 63
圖 4-16 傳統引擎車與扭力耦合器動力系統引擎平均操作點比較 ... 64
圖 4-17 傳統引擎車與扭力耦合器動力系統油耗表現比較 ... 66
圖 4-18 使用轉速耦合器之動力系統功能動力圖[13]... 66
x
圖 4-19 使用扭力與速度耦合器之 D 型動力系統功能動力圖 ... 67
圖 4-20 引擎操作線圖 ... 69
圖 4-21 WLTC 行車型態引擎操作點,左上低速;右上中速;左下高速;右下 超高速 ... 69
圖 4-22 發電機操作點於 WTLC 超高速 ... 70
圖 4-23 傳統引擎車與 THS 系統引擎效率比較 ... 70
圖 4-24 傳統引擎車與 THS 系統行駛 WLTC 引擎平均操作點比較 ... 71
圖 4-25 傳統引擎車與 THS 混合動力系統油耗表現比較 ... 73
圖 4-26 原始設定值功率車輛行駛 WLTC 行車型態時馬達(左)與發電機(右)操作 點分布 ... 75
圖 4-27 -50%設定功率車輛行駛 WLTC 型車型態時馬達(左)與發電機(右)操作點 分布 ... 76
圖 4-28 串聯式混動功能動力圖 ... 76
圖 4-29 行駛 WLTC 行車型態超高速實際車速與電池 SOC ... 77
圖 4-30 串聯式動力系統馬達操作點 ... 78
圖 4-31 傳統引擎車與串聯式動力系統引擎效率比較 ... 79
圖 4-32 傳統引擎車與串聯式系統油耗表現比較 ... 80
圖 5-1 新型油電混合機構[35]... 83
圖 5-2 新型混合動力系統中混合動力單元剖面視圖[35]... 84
圖 5-3 新型混合動力系統功能動力圖 ... 86
圖 5-4 單馬達增程模式功能動力圖 ... 86
圖 5-5 雙馬達混合模式功能動力圖 ... 87
圖 5-6 三動力混合模式功能動力圖 ... 87
圖 5-7 控制策略引擎操作線 ... 90
圖 5-8 ADVISOR 內建 Toyota Prius 車輛傳動模型[23] ... 91
xi
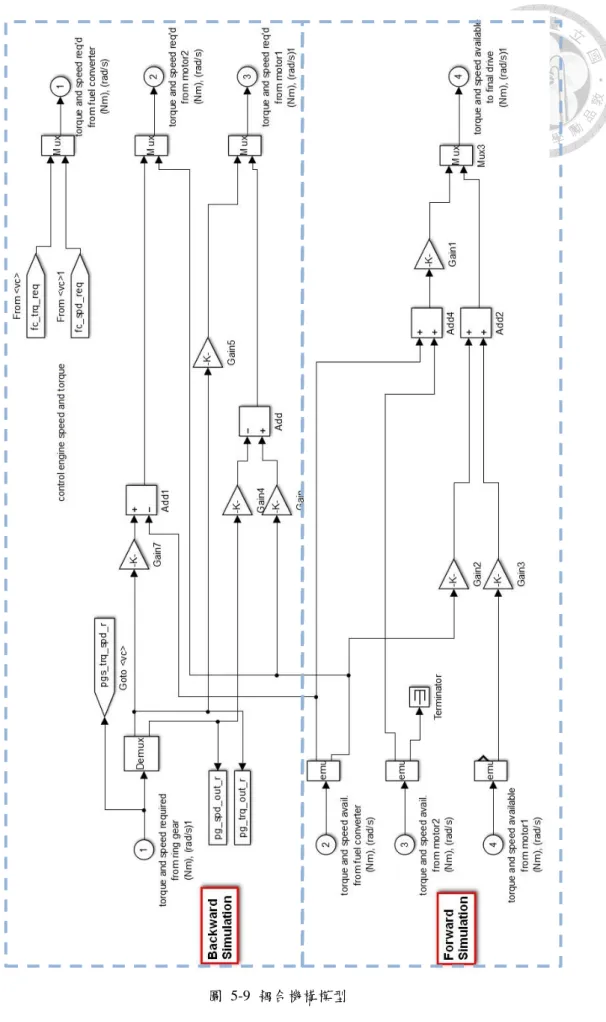
圖 5-9 耦合機構模型 ... 93
圖 5-10 新型混合動力系統平均操作點比較 ... 94
圖 5-11 引擎效率比較 ... 95
圖 5-12 油耗比較 ... 96
圖 5-13 ECE-15 行車型態 ... 96
圖 5-14 車速與電池 SoC ... 97
圖 5-15 電量充足時動力元件之轉速變化 ... 97
圖 5-16 電量充足時動力元件之扭力變化 ... 98
圖 5-17 電量充足時動力元件之功率變化 ... 99
圖 5-18 車速與電池 SoC 模擬結果 ... 100
圖 5-19 電量不足時動力元件之轉速變化 ... 100
圖 5-20 電量不足時動力元件扭力 ... 101
圖 5-21 電量不足時動力元件之功率變化 ... 102
xii
表目錄
表 1.1 以電子化程度比較油電混合動力系統[4] ... 3
表 2.1 動力元件圖示 ... 12
表 2.2 傳動元件圖示 ... 13
表 2.3 煞車、離合器元件圖示 ... 13
表 2.4 轉速耦合器圖示 ... 14
表 2.5 連接線段與扭力耦合器圖示 ... 15
表 3.1 混合動力系統操作模式 ... 19
表 3.2 操作模式 ... 22
表 3.3 傳統引擎車耦合機構分析 ... 23
表 3.4 WLTC 行車型態特性參數 ... 28
表 3.5 動力元件與系統負載間轉速與扭力關係 ... 33
表 3.6 單動力元件系統構造圖[18] ... 38
表 3.7 雙動力元件驅動系統構造圖[18] ... 39
表 3.8 三動力元件驅動系統構造圖[18] ... 40
表 3.9 A 型動力系統系統構造圖 ... 42
表 3.10 B 型動力系統構造圖 ... 43
表 3.11 C 型動力系統構造圖 ... 45
表 3.12 D 型動力系統構造圖 ... 46
表 4.1 動力系統類型與系統負載類型 ... 50
表 4.2 動力系統配置 ... 51
表 4.3 車輛動力模擬參數 ... 51
表 4.4 Toyota 五檔齒輪箱減速比[22] ... 55
表 4.5 引擎車輛耦合機構分析 ... 56
表 4.6 傳統引擎車平均操作點與效率 ... 58
xiii
表 4.7 傳統引擎傳動效率 ... 58
表 4.8 引擎車系統能量效率 ... 59
表 4.9 動力系統耦合機構分析 ... 60
表 4.10 控制策略參數 ... 61
表 4.11 引擎平均操作點與效率 ... 63
表 4.12 傳動效率 ... 65
表 4.13 使用扭力耦合器之系統能量效率 ... 66
表 4.14 耦合機構分析 ... 67
表 4.15 引擎平均操作點與效率 ... 70
表 4.16 Prius 於 WLTC 行車型態傳動效率 ... 73
表 4.17 系統能量效率 ... 73
表 4.18 動力元件最大功率調整方式 ... 74
表 4.19 最大功率調整方式於各行車型態下的油耗 ... 74
表 4.20 耦合機構分析 ... 77
表 4.21 串聯式引擎平均操作點與效率 ... 78
表 4.22 串聯式動力系統傳動效率 ... 80
表 4.23 能量效率 ... 80
表 5.1 混合動力系統構造圖 ... 82
表 5.2 新型轉速耦合器功能動力圖示 ... 85
表 5.3 元件操作狀態表 ... 88
表 5.4 新型油電混合系統耦合機構分析 ... 88
表 5.5 動力元件功率 ... 89
表 5.6 新型動力系統引擎動力傳遞途徑 ... 95
xiv
縮寫對照表
THS Toyota Hybrid System ADVISOR Advanced Vehicle Simulator NEDC New European Driving Cycle
WLTC Worldwide harmonized Light vehicles Test Cycle ECE Economic Commission for Europe
SoC State of Charge
xv
符號彙編
R
a 空氣阻力R
r 滾動阻力Rg 爬坡阻力
空氣密度C
d 車輛空阻係數Af 車輛正面投影面積 V 車速
坡度傾斜角度W
車重g
重力加速度a
車輛加速度F
t 曳引力
e 引擎效率T
e 引擎輸出扭力
e 引擎輸出轉速mf 單位時間油耗
H
l 單位質量燃油燃燒熱N
om 可達成之操作模式數量xvi
feasible
N 可達成操作模式的元件操作狀態
N
cb 離合器加煞車單元數量total
x
行車型態總路徑長total
E
行駛總消耗能量E
行駛單位距離平均消耗能量P
d 車輛行駛功率i
車輪滑差r
車輪半徑np 動力元件數量
n
w 驅動輪數n
c 機械耦合器的數量n
d 差速器的數量n
tc 扭力耦合器數量n
sc 轉速耦合器數量total
總體系統效率Z
A 第二太陽齒輪齒數Z
B 行星齒輪與第二太陽齒輪耦合的齒輪齒數Z
C 行星齒輪與第一太陽齒輪耦合的齒輪齒數Z
D 第一太陽齒輪齒數xvii
Z
D/ Z
c
Z
A/ Z
Bi
g /
f
r 最終傳動比1
第一章 緒論
1-1 前言
隨著全球環保意識提升,如何有效利用能源成為各國重要的議題。台灣天 然資源缺乏,98%以上能源依靠進口,因此減少車輛能源的消耗更為急迫。現 今純電動車被視為最佳的環保能源車輛,其在行駛中無排放廢氣且能量轉換效 率高,能有效降低能量消耗與減少都市空氣汙染,然而純電動車推廣與發展受 限於電池技術。電池與汽油相比的能量密度低且成本高,純電動車與傳統引擎 車相比續航力不足且能量補充不易,因此現今多數車輛仍使用引擎內燃機作為 主要動力源。
混合動力車輛能以增加動力源的方式增進車輛效率,油電混合動車以引擎 與馬達作為動力來源,使用馬達調節引擎運作,提升引擎能量轉換效率,達到 減少能源消耗的效果同時減少廢棄的排放。此外當車輛減速時能透過馬達反轉 作為發電機使用回收車輛動能轉化為電能儲存,節省行駛時消耗的能源。混合 動力車輛被視為銜接傳統引擎車與純電動車的過渡產品,然而待電池技術或燃 料電池技術突破前,混合動力驅動系統是因應能源短缺與環境汙染問題最具可 行性的方法。
混合動力驅動系統並不是近期才有發展,例如柴電潛艇使用的柴油引擎與 馬達,當航行於水面時使用柴油引擎為便池充電,於水面下時使用馬達安靜潛 行。柴電火車也是搭載了柴油引擎與馬達,由柴油引擎提供動力發電來驅動馬 達帶動列車。最早出現的混合動力車輛為 1901 年的「Lohner-Porsche」,此車搭 配了汽油引擎與馬達,由引擎發電提供能量驅動於前軸的輪轂馬達驅動車輛 [1]。近期因能源消耗的重視使的各車廠研發各類型的混合動力車輛,混合動力
2
系統趨向多元化發展且構造越來越複雜[2],系統之構造與特性間的關係不明 確,從眾多的混合動力系統中依照系統特性分類是困難的工作,因此本研究由 動力元件的耦合方式分析並評估混合動力系統之特性,作為提供混合動力系統 配置與設計時做參考。
1-2 文獻回顧
本節整理混合動力驅動系統耦合分析與評估相關文獻,混合動力系統所牽 涉之技術層面十分廣,首先整理混合動力驅動系統分類方式,分類方式有以動 力混合程度分類與傳動配置分類兩種。接著整理混合動力系統分析與評估方法 相關文獻。
1-2-1
混合動力系統分類混合動力系統擁有許多分類方法,而在研究中最常被使用的為以動力混合程 度分類與傳動配置分類。以下依序介紹以混合程度分類與傳動配置分類。
1. 以動力混合程度分類
混合動力車輛依照動力混合程度(hybridization)分類為輕度混合(Micro Hybrid),中度混合(Mild Hybrid),重度混合(Full Hybrid or Strong Hybrid)三種 [3],並以動力系統所能達到的功能作為分類判斷基準。輕度混合使用小功率馬 達作為輔助引擎啟動,行駛時引擎單獨驅動車輛,因此只能節省 5%至 10%之 油耗。中度混合使用較大馬達,除了輔助引擎啟動外馬達可提供動力輔助與煞 車回充功能,可節省 10%以上汽油消耗。重度混動除擁有中度混動之功能外,
在較低車速與電池電量充足時可由馬達單獨驅動車輛,達到零排放行駛的功 能,重度混動與中度混動相比可以節省更多油耗。然而以上以功能作為混動程 度分界的方式擁有模糊界線,因此 Wu 等以電氣化程度(electrification level)將分 類準則[4],以電池電壓、電池儲存與所能提供功率為電氣化程度分類界線,重 新整理各混動程度所能達到之功能與對應的電池電壓,如表 1.1,並加入考慮
3
純電動車史分類增加至六類,電氣化程度由低至高分別為輕度混合、中度混 合、重度混合、插電式混動(Plug-in Hybrid)、增程型電動車(Extended-Range Electric Vehicle)以及純電動車(Pure Electric Vehicle)。
表 1.1 以電子化程度比較油電混合動力系統[4]
2. 以傳動配置分類
混合動力系統從最早期的串聯式與並聯式逐漸發展出更複雜的系統,最早 Chau 與 Wong 以能量管理的觀點,依照動力來源的連接順序與流向將混合動力 系統分為四類[5],串聯式混合(Series hybrid)、並聯式混合(Parallel hybrid)、串 並聯式混合(Series-Parallel hybrid)及複雜式混合(Complex hybrid)。隨著傳動系統 的演進越趨複雜,使用元件連接方式或動力流向來定義系統種類經常造成混 淆,因此 Ehsani 在分類架構圖中增加電能耦合元件與機械能耦合元件[6],以混 合動力系統中電能耦合(electrical coupling)與機械能耦合(mechanical coupling)明 確定義系統的分類,其分類架構圖如圖 1-1,各分類說明如下。
串聯式混動系統為最簡單的形式,此架構的分類標準是兩股電能動力在電 能耦合器中耦合。元件包含了一個引擎、發電機、馬達及電池,引擎動力只提 供發電機發電,發電機產生之電能直接推動驅動馬達或是儲存於電池中。電能 耦合器連接了電池、發電機及馬達。
並聯式混動系統的架構特徵是兩股機械能在機械耦合器中耦合。典型的並 聯式混動系統動力元件包含了引擎、馬達及電池,引擎提供的動力與馬達提供
4
的動力在機械耦合器中耦合,兩者可以共同或分別驅動車輛,當電池電量不足 時引擎可以於驅動車輛時同時對電池充電。
串並聯式混動系統其架構的特徵是同時擁有電能耦合與機械能耦合器,此 動力系統行駛時同時擁有並聯式與串聯式混動系統的特性,其中引擎與馬達共 同驅動車輛,而引擎部分動力轉換為電能提供馬達驅動車輛,串並聯式混動結 合了串聯式混動及並聯式混動的結構與優點,但同時擁有較高的控制複雜性以 及成本。
複雜式混動系統其架構與串並聯式混動相似,兩者間的差異為複雜式混動 的發電機同時也可以做為馬達做驅動,動力可經由電機雙向流動,因此動力系 統得以切換為串聯式混動、並聯式混動以及串並聯式混動。複雜式混動系統可 以根據系統模式切換為串聯式混動系統將引擎動力全轉換為電能驅動馬達,或 如並聯式混動力統以引擎與馬達共同驅動車輛,同時也可切換為串並聯式混動 力統,將引擎部分動力轉換為電能驅動馬達,如此系統架構有最高的控制複雜 度以及成本。
串聯式混動 並聯式混動
串並聯式混動 複雜式混動
電子連結 機械連結 液體連結
圖 1-1 混合動力系統分類架構圖[6]
5
1-2-2
混合動力系統分析各類混合動力系統之間擁有不同特性,並根據動力系統使用的情境而有不同 的表現,以下整理對混合動力系統之混動程度、傳動配置以及行車型態之分 析。
1. 混動程度
混動程度比例(hybridization ratio)為混合動力系統重要的特徵,混動程度可 用電機動力源佔總動力的比例來表示,其中 Lukic 及 Emadi[7]將使用一個引擎 與一個馬達的並聯式混動系統的混動程度以混動因子(hybridization factor)表示,
混動因子的計算方式如式(1.1)。
PEM
HF=PEM
P
ICE (1.1)其中
P
EM為馬達所能輸出最大功率,P
ICE為引擎所能輸出最大功率,接著比 較了並聯式油電混合動力其混動程度比例對車輛油耗與性能的關係,發現混動 程度比例大於某一數值後油耗與性能不再隨著比例上升而改善,歸納出最佳的 混動程度比例為 0.3 到 0.5 間。Holder 及 Gover[8]改變喜統總功率,分析不同總 功率下最佳混動比例。Sumdstrom 等[9]比較並聯式混動有無使用離合器使引擎 得以和系統分離,分析兩種系統混動程度比例對油耗的影響,使用動態規劃 (dynamic programming)來計算兩種系統之最佳控制策略,並使用八種行車型態 的來進行分析比較,最後得到結論有加入離合器之系統與無加入離合器之系統 相比有較佳油耗表現,並且在維持相同油耗的情況下可使用較小功率之馬達。2. 傳動配置
混合動力系統傳動配置比較方面的研究,Finesso 等[10]提出三種並聯式混 合動力系統,發展即時最佳化控制策略,比較三者成本與油耗之差異。Millo 等 [11]針對中型車輛比較了六種傳動配置的排放與油耗,並且比較使用柴油引擎
6
與汽油引擎的差異。Wang 等[12]比較了四種傳動配置在成本、溫室氣體排放以 及能量效率的差異。在系統動力匹配方面陳盈秀[13]研究車輛動力系統的相互 關係,分析相關參數對於系統整體的影響,並進行系統匹配的設計,使動力系 統達到最大的輸出效益。
3. 行車型態
行車型態反映車輛的行駛狀況,通常用時間對車速之資料來紀錄,行車型 態對動力系統表現有很大的影響,De Haan 及 Keller[14]以有限的行車型態實驗 資料來預估車輛於真實路面行駛時的空氣汙染排放,Joumard 等[15]分析行車型 態參數變化對車輛排放造成的影響,Jaafar 等[16]將行車型態納入混合動力系設 計考量,根據真實行駛狀況最佳化系統設計以提升系統效率。
1-3 研究動機與目的
混合動力系統之動力總成影響動力系統的性能與效率,當進行動力系統設 計時動力總成元件配置結構經常是第一項決定的要素,並根據設計選用系統所 使用之元件與發展控制策略。然而混合動力系統與傳統傳動系統相比擁有更多 的設計變數,因此於設計初期決定配置結構是困難的。如何分析評估動力系統 之特性,使動力元件擁有良好的運作,是設計的重要考量條件。
目前混合動力系統相關文獻主要以能量管理的角度依據系統內動力流動方 向來進行系統分類與分析,並且在選定特定動力總成結構與固定混合動力系統 總動力的情況下討論引擎與馬達混動比例對系統表現的影響,較少從動力耦合 的觀點討論增加動力元件對動力系統的影響。
本論文將從動力元件耦合的觀點深入討論混合動力系統特性,並分析在固 定引擎功率與混動比例下將動力元件使用不同方式耦合對系統表現的影響,以 及動力系統於不同行車型態下的表現,期望對混合動力系統的動力總成元件配 置與結構設計有所助益。
7
1-4 研究架構與步驟
本研究針對混合動力系統之特性進行分析與探討,研究首先對混合動力系 統各元件做特性分析,接著由動力耦合觀點對系統做分類。接著研究使用車輛 模擬軟體 ADVISOR 分析各類系統之效率並比較其差異。研究最後分析評估新 型混合動力系統,以下為研究各章之內容大綱:
第一章 緒論
介紹本研究之研究背景、文獻回顧、動機與目的,並說明研究架構與步驟 第二章 理論基礎
首先解釋機械耦合器的類型與原理,接著介紹本研究使用之功能動力圖表 示方法,最後解釋車輛動力學。
第三章 混合動力系統特性分析
討論混合動力系統基本概念與操作模式,分析混合系統之動力元件、系統 負載與耦合機構。接著討論動力元件與系統負載間關係,最後以此關係進行混 合動力系統分類。
第四章 混合動力系統效率分析
介紹模擬分析所使用工具並配置所要模擬之系統。研究系統耦合效率,以 三個部分來進行研究,分別為引擎效率、傳動效率以及能油耗表現,比較不同 耦合方式之動力系統特性差異。
第五章 新型混合動力系統分析與模擬
利用前章分析方法分析一新型混合動力系統,並使用程式模擬此系統動力 元件的表現。
第六章 結論與建議
本研究之研究成果,與未來可繼續研究之方向
8
第二章 理論基礎
本章介紹研究的理論基礎,內容主要分為四個部分。第一部分介紹機械耦 合器。第二部分介紹功能動力圖。第三部份介紹車輛動力學。
2-1 機械耦合器類型與原理分析
Ehsani[6]將混合動力系統中將多個機械能來源相互耦合的裝置稱為機械耦 合器(Mechanical Coupling),機械耦合器可以將多個輸入的機械能來源耦合為單 一輸出,同樣的也可以將單一機械能輸入分為多個輸出,根據能量的流向機械 耦合器可以有不同的功能,然而機械耦合器必須至少有一個輸入端以及一個輸 出端。機械耦合器在混合動力系統中可以將引擎輸出的動力與馬達輸出的動力 加以耦合。混合動力系統中的機械耦合器分為兩種,「扭力耦合器(Torque Coupling)」以及「轉速耦合器(Speed Coupling)」。
2-1-1
扭力耦合器扭力耦合器使用扭力疊加的方式來耦合動力源,圖 2-1 為扭力耦合器示意 圖,此扭力耦合器共有三個端口,端口 1 為固定的動力輸入轉速與扭力,扭力 耦合器使扭力耦合器三端的扭力呈疊加關係如(2.1)式所示,而扭力耦合器三端 之轉速則呈固定比例關係如(2.2)式所示。以上關係是皆假設忽略扭力耦合器中 的能量耗損。其中
k
1及k
2為扭力耦合器參數,根據扭力耦合器結構決定其數 值。圖 2-1 扭力耦合器示意圖
9 1 1 2 2 3
k T k T T
(2.1)1 2
3
1 2
k k
(2.2)以下舉例常見的扭力耦合器如圖 2-2 所示。(a)為同軸扭力耦合,常見於將 馬達轉子連接於轉軸,此連接方式馬達轉速與轉軸相同,扭力則與轉軸扭力相 加,
k
1及k
2皆為 1。(b)為齒輪組扭力耦合,為三軸以三個齒輪相連接,其中k
1為齒輪 1 與齒輪 3 之齒數關係
z
3/ z
1,k
2為齒輪 2 與齒輪 3 之齒數關係z z
3/
2。(c)為皮帶滑輪組扭力耦合,使用滑輪與皮帶將兩軸連接至第三軸,
k
1為滑輪半 徑關係決定r
2/ r
1,k
2為滑輪半徑關係r r
3/
4。1
1 k
,k
2 1
3 1
1
k z
z
及 2 32
k z
z
1
, ,
2 3z z z
為齒輪齒數3 2
1 2
1 4
,
r k r k
r r
1
, , ,
2 3 4r r r r
滑輪半徑(a)同軸扭力耦合 (b)齒輪組扭力耦合 (c)皮帶滑輪組扭力耦合
圖 2-2 常見扭力耦合器[6]
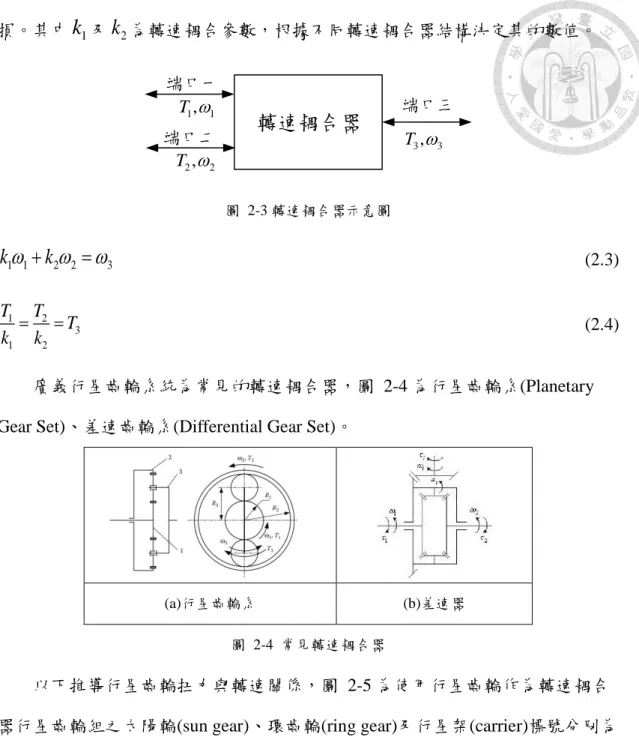
2-1-2 轉速耦合器
轉速耦合器使用轉速疊加的方式來耦合動力源,圖 2-3 為轉速耦合器示意 圖,此轉速耦合器共有三個端口,端口 1 為固定的動力輸入轉速與扭力,轉速 耦合器使其三端的轉速呈疊加關係如(2.3)式所示,而轉速耦合器三端之扭力則 呈固定比例關係如(2.4)式所示。以上關係是皆假設忽略轉速耦合器中的能量耗
10
損。其中
k
1及k
2為轉速耦合參數,根據不同轉速耦合器結構決定其的數值。轉速耦合器
1, 1
T
2, 2
T T
3,
3端口三 端口一
端口二
圖 2-3 轉速耦合器示意圖
1 1 2 2 3
k k
(2.3)1 2
3
1 2
T T
k k T
(2.4)廣義行星齒輪系統為常見的轉速耦合器,圖 2-4 為行星齒輪系(Planetary Gear Set)、差速齒輪系(Differential Gear Set)。
(a)行星齒輪系 (b)差速器
圖 2-4 常見轉速耦合器
以下推導行星齒輪扭力與轉速關係,圖 2-5 為使用行星齒輪作為轉速耦合 器行星齒輪組之太陽輪(sun gear)、環齒輪(ring gear)及行星架(carrier)標號分別為 s,r,c,
R R
s,
r為太陽輪與環齒輪半徑,太陽齒、環齒輪以及行星架之轉速為正方 向如箭頭所標示,此為轉速耦合器其轉速呈疊加關係而扭力成固定比例關係。11
圖 2-5 行星齒輪作為轉速耦合器
太陽齒相對於行星架轉速與環齒輪相對於行星架轉速關係與兩者半徑常相 同,負號代表兩者轉動方向相反,太陽齒與環型齒半徑關係可表示為太陽輪與 環齒輪的齒數關係
Z Z
s,
rs c r r
r c s s
R Z
R Z
(2.5)將(2.5)式整理後可化為用太陽齒與環型齒之齒數表示轉速關係
s r
s r c
s r s r
Z Z
Z Z Z Z
(2.6)而太陽齒、環形齒與行星架之扭力關係可由其半徑關係推得
( s r) s ( s r) r Tc
s r
Z Z Z Z
T T
Z Z
(2.7)而行星齒輪中環齒輪半徑大於太陽齒半徑
R
r R
s;Z
r Z
s。由式(2.7)所表示之太陽齒、環形齒以及行星架扭力關係可得三者扭力大小關係
T
c T
rT
s。 在使用行星齒輪作為轉速耦合器時,三端之扭力成固定比例關係,比例關係中 行星架所受之扭力最大,其次為環齒輪扭力,太陽齒所受扭力最小。12
2-2 功能動力圖
本研究所使用之圖畫表示法為「功能動力圖」(function-power graph),是由 江承舜、邵彥翔以及陳羿名[17-19]所提出並發展。功能動力圖可以明確的呈現 機械系統內包含的元件,以及系統內元件連接的方式,如此可以清楚地了解到 各元件間的交互關係與動力流動。
2-2-1 功能動力圖元件介紹
1. 動力元件 (Power unit)
動力元件為提供系統動力輸入、輸出及儲存之元件,其中有引擎 (Internal combustion engine,符號代表 ICE)為動力輸出元件,電動機(Motor/Generator,
符號代表 MG)可做為動力的輸入或輸出。動力元件必須至於線段的末端且只允 許與一個其他元件連結。
表 2.1 動力元件圖示
名稱 圖示
動力元件 PU
引擎 ICE
電動機
MG
馬達 M
發電機 G
輪胎 W
輸出 OUT
系統負載 Load
13
2. 傳動元件
傳動元件為改變轉速與扭力比例的元件,包含齒輪組、鍊條、皮帶、變速 箱、無段變速器等等單一輸入與輸出的元件,傳動元件必須與兩條連接線連 接。
表 2.2 傳動元件圖示
名稱 圖示
傳動元件 T
齒輪 G 自動變速箱 AT 手動變速箱 MT
無段變速器 CVT 3. 煞車、離合器元件
離合器的兩端與連接線相接,操作時可以連接或切斷線段的連接。煞車元件 一端接於線段,當煞車做動時限制連接線段上的元件接地。
表 2.3 煞車、離合器元件圖示
名稱 圖示 解釋
離合器
C
連接或切斷狀態
煞車單元 B 接合或切斷狀態
4. 轉速耦合器元件(Speed Coupler)
多自由度轉速耦合器元件常見於傳動系統。雙自由度元件以三角形表示,三 個角分別以連接線段連接其他功能動力圖元件。最常見的雙自由度元件為行星
14
齒輪組,其圖示以三角形表示並在中間以文字表示雙自由度行星齒輪組,三個 角的連接點以 s,c,r 分別代表太陽齒輪、行星架以及環齒輪。
表 2.4 轉速耦合器圖示
名稱 圖示 解釋
轉速耦合器 c
a
b SC 2DOF
通用雙自由度轉速耦 合器
行星齒輪系 r
c
s PG 2DOF
s,r,c 分別代表太陽 齒、還齒輪與行星架
拉威挪齒輪系 3DOFRG
s1 c
r s2
三自由度轉速耦合器
差速器 c
a
b DG
2DOF 差速器
多自由度 轉速耦合器
e
a d
b c
MDOF
通用多自由度轉速耦 合器
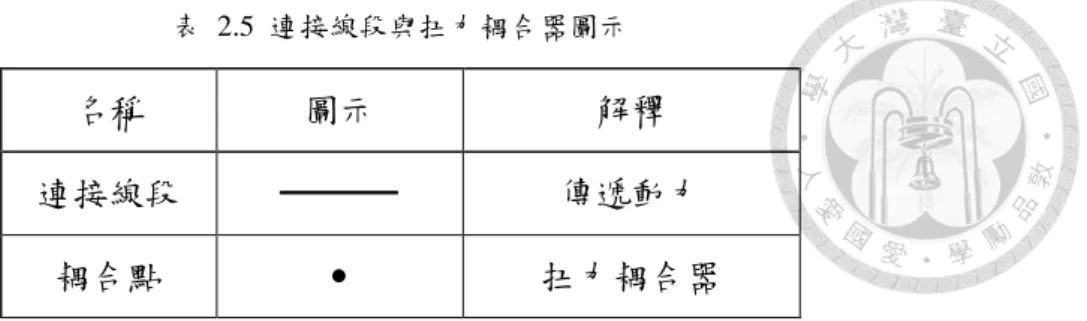
5. 連接線段與扭力耦合器
連接線段表示系統中各元件的連接情況,在功能動力圖中的功能為傳遞動 力,連接線段的連接必須符合以下規則:
(1) 連接線段不可以有交叉情況
(2) 連接線段的兩端必須接於功能動力圖元件
耦合點代表的為扭力耦合器,以連接線段連接耦合點,一個耦合點可以連 接複數個連接線段。連接扭力耦合器點之連接線段之間扭力呈疊加關係,轉速 呈固定比例關係。
15
表 2.5 連接線段與扭力耦合器圖示
名稱 圖示 解釋
連接線段 傳遞動力
耦合點 扭力耦合器
2-2-2 功能動力圖表示車輛傳動系統
使用功能動力圖可以簡潔明瞭的表示車輛傳動系統,圖 2-6 為 Toyota Prius 使用之 THS(Toyota Hybrid System)混合動力系統,其中有兩個電動機與一個引 擎,並有行星齒輪組作為動力分配裝置(Power Split Device)。
圖 2-6 THS 混合動力系統
THS 混合動力系統動力元件為一個引擎以及兩個馬達,使用前一節介紹之 功能動力圖動力元件表示方法繪製,行星齒輪組為功能動力圖之轉速耦合器,
引擎與電機一分別與與行星齒輪組行星架與太陽齒相接,使用連接線段相接並 在元件標示行星架與太陽齒位置。電機二與行星齒輪組外齒輪相接,兩者為扭 力耦合關係,使用連接線段與扭力耦合器點連接兩者。耦合後之動力透過齒輪 連接輸出,使用功能動力圖傳動元件以及動力元件之輸出繪製並用連接線段連 接。繪製完成之 THS 混合動力系統功能動力圖如圖 2-7 所示。
16 ICE
MG1
r c
s PG 2DOF
MG2
G OUT
圖 2-7 THS 混合動力系統功能動力圖
2-3 車輛動力學
車輛在行駛時必須克服行車阻力讓車輛前進,行車阻力分別為滾動阻力、
空氣阻力以及爬坡阻力,其代號分別為
R
r、R
a、R
g。圖 2-8 為驅動力與行車 阻力作用在一雙軸車輛的自由體圖。以下將分別介紹當車輛以速度V
直線前進 於角速
的斜坡上的滾動阻力、空氣阻力以及爬坡阻力。圖 2-8 行車阻力自由體圖
1. 滾動阻力(Rolling resistance,
R
r)R
r mg cos f
r (2.8)滾動阻力為車輛前進時,輪胎與地面磨擦與變形產生的能量消耗。其中
m
為車重,
g
為重力加速度,f
r為滾動摩擦係數。本研究假設滾動摩擦係數為常 數。不隨車速、溫度以及胎壓改變。17
2. 空氣阻力(Aerodynamic resistance,
R
a)2 a
1 2 d f
R
C A V (2.9)空氣阻力為車輛表面與空氣產生黏滯、壓力不平均等關係造成。不同的車 輛外型與表面有不同的空氣阻力,
為空氣密度C
d為風阻係數,A
f為車輛正 投影面積。3. 爬坡阻力(Grade resistance,
R
g)g
sin
R mg
(2.10)爬坡阻力為當車輛行駛於坡度路面時,必須克服的重力的水平分量力,其 中
m
為車重,g
為重力加速度,
為坡度傾斜角度。動力系統輸出的曳引力(tractive effort,
F
t)在扣除行車阻力後為車輛行駛的 驅動力(tractive force),當曳引力等於行車阻力時,車輛維持等速。而當曳引力 大於行車阻力時,車輛為加速運動。當曳引力小於行車阻力時,車輛做減速運 動。t a r g
mdV ma F R R R
dt (2.11)
= + + +
t a r g
F R R R ma
(2.12)18
第三章 混合動力系統特性分析
本章節探討混合動力系統之複數動力源如何經過耦合機構耦合後滿足系統 之負載,並針對混合動力系統各部份做介紹分析。首先介紹混合動力系統以及 其可達成之操作模式,系統負載的類型與特性,接著分析不同構型之混合動力 系統,接著分析動力元件參數與系統負載之關係。
3-1 混合動力系統基本概念
混合動力系統是指由兩個以上之動力來源(power source)產生動力之系統,
例如油電混合車使用引擎與馬達為動力來源。圖 3-1 為混合動力系統概念圖,
概念圖中呈現單向流動之傳動鍊與動力雙向流動之傳動鍊,概念圖中的傳動鍊 數量可依照動力元件數量再做增加。
常見之動力單向流動傳動鏈為引擎傳動練以及燃料電池,燃油在引擎內爆 炸燃燒轉化為機械能或透過發電機轉化為電能,此轉化為不可逆反應。燃料電 池透過氧或其他氧化劑進行氧化還原反應,將燃料中的化學能轉化為電能。常 見雙向流動傳動鏈如電機傳動鏈,電池內電能透過電機轉化為機械能,透過反 轉電機可以將機械能在轉化為電能儲存於電池中。
耦合機構功能為將多個動力源與系統負載間相互耦合,混合動力系統之耦 合機構由機械耦合器、離合器以及煞車單元所組成,機械耦合器如 2-1 節介紹 又可分為轉速耦合器與扭力耦合器。系統負載為系統必須滿足之動力需求,如 車輛行駛於路面時需滿足車輛速度與加速度需求。
19
系統 負載 單向動
力元件
雙向動 力元件
能量儲 存元件 (一)
能量儲 存元件 (二)
單向動力流 雙向動力流
耦合機構
圖 3-1 混合動力系統概念圖[20]
3-2 耦合機構定性分析
此節進行混合動力系統之耦合機構定性分析,作為評估耦合機構設計之優 劣。混合動力系統耦合機構包含了機械耦合器、離合器以及煞車接地。有效合 理的耦合機構為容易控制,且能使車輛進行不同的操作模式。
3-2-1
混合動力系統操作模式操作模式為混合動力系統有效的動力流動路徑,由控制動力元件之動力輸 出與輸入,離合器接合與斷開等連接動力傳遞途徑。由分析圖 3-1 之動力流向 可得到系統不同操作模式,分別使用最常使用之引擎與馬達做為動力元件,能 量儲存元件使用油箱以及電池,以下條列不同操作模式以及其功能解釋。
表 3.1 混合動力系統操作模式
編號 操作模式 說明
A
引擎輸出動力至負載
系統 負載 引擎
馬達 油箱
電池
耦合機構
使用於當電池沒有殘餘電量且 引擎沒有多餘動力對電池充 電,或當電池已經滿容量且引 擎輸出動力可滿足負載需求。
20
B
馬達輸出動力至負載
系統 負載 引擎
馬達 油箱
電池
耦合機構
使用於當引擎無法有效率運 作,如極低速運作狀態,或是 在有限制排放的行駛區域內行 駛車輛。
C
引擎與馬達輸出動力至負載
系統 負載 引擎
馬達 油箱
電池
耦合機構
此為引擎與馬達混合驅動模 式,使用於負載動力需求大時 且電池電量充足,如加速或爬 坡行駛。
D
引擎輸出至負載與電池
系統 負載 引擎
馬達 油箱
電池
耦合機構
此為引擎驅動車輛同時對電池 充電,使用於當引擎可提供大 於負載之動力且電池有充電需 求。
E
引擎輸出至電池
系統 負載 引擎
馬達 油箱
電池
耦合機構
使用引擎對電池充電,且引擎 為驅動車輛,此時車輛並非為 驅動狀態,可為停止或減速階 段。
F
引擎輸出至電池,馬達輸出至負載
系統 負載 引擎
馬達 油箱
電池
耦合機構
此為引擎對電池充電,接著馬 達使用電池能量驅動車輛,為 串聯式混動驅動方式。
21
G
負載輸出至電池
系統 負載 引擎
馬達 油箱
電池
耦合機構
此為動能回充模式,車輛的動 能透過馬達逆轉成為發電機將 電能儲存於電池中。
以上系統操作模式可以使混合動力系統實現以下單動力系統無法達成之功 能,如此增進行駛效率與降低空氣污染排放。
1. 使用動能回收系統在車輛減速時回收動能,傳統引擎傳動車輛減速時動能 轉換為熱能散失
2. 使引擎擁有更多的操作自由度,令引擎保持在高效率區間,並將輸出多餘 能量儲存於電池中。
3. 其他動力元件在需要較大動力輸出時提供動力輔助,如此可以於系統中使 用較小的引擎。
4. 根據不同情況選擇較有效率的動力傳遞途徑
3-2-2 操作模式指標
各種不同混合動力系統所能達成之操作模式不同,表 3.2 整理了各系統所 能達成之操作模式,混合動力系統比起傳統單動力系統有更多操作模式可選 擇,在不同系統負載下選擇對應操作模式可以提升系統的效能、效率以及排 放,而耦合機構的離合器配置設計影響可達成的操作模式。操作模式指標計算 動力系統可以達成之操作模式,其計算方式如式(3.1)。當動力系統可以達成七 種操作模式,則將其指標評分為 100%。
操作模式指標 100%
7 Nom
(3.1)
其中
N
om為系統可達成之操作模式數量。22
表 3.2 操作模式
編號 操作模式
A 引擎輸出動力至負載 B 馬達輸出動力至負載
C 引擎與馬達輸出動力至負載 D 引擎輸出至負載與電池 E 引擎輸出至電池
F 引擎輸出至電池,馬達輸出至負載 G 負載輸出至電池
3-2-3 耦合機構有效性
耦合機構內可能包含了多個可操作元件,如離合器、行星齒輪端的煞車接 地,然而並不是所有元件的操作狀態都可以形成有效的操作模式。當一個耦合 機構擁有許多可操作的元件,但只有少數操作狀態可以形成操作模式,其耦合 機構有效性低。而設計良好的耦合機構在配置操作元件時能避免形成無效的操 作,並且盡可能達成多種操作模式。耦合機構有效性評估可形成操作模式的元 件操作狀態佔所有可能的操作方式的百分比,其計算公式如式(3.2),對於沒有 可操作元件的耦合機構,其耦合機構有效性為 100%。藉由設計單自由度元件的 配置位置可以提升耦合機構有效性。
耦合機構有效性 = 100%
2 cb
feasible N
N (3.2)
其中
N
feasible為可形成操作模式的元件操作狀態數量,N
cb為可操作元件數量總和,為離合器數量加上煞車接地數量。
以下舉例一引擎搭配變速箱之動力系統之耦合機構分析,該系統可以達成 A 操作模式,因此系統操作模式指標為 14%,該系統無可操作之離合器元件,
因此耦合機構有效性為 100%,如表 3.3。
23
表 3.3 傳統引擎車耦合機構分析
操作模式
操作模式指標 耦合機構有效性
A B C D E F G
● 14% 100%
3-3 混合動力系統元件介紹
3-3-1
能量儲存元件能量儲存元件為混合動力系統中提供系統動力來源之元件,圖 3-2 為各能 量源淨能量密度預估,各能量源之能量密度皆考慮轉化效率,縱座標顯示每公 斤可以產生之機械能,長條圖黑色下緣為目前商用可達到之平均能量密度,灰 色上緣未普及系統可達到之能量密度。可以觀察到使用碳氫化合物之能量源相 較於電池有極高的能量密度,如此巨大的差異使的大部分車輛使用碳氫化合物 作為能量源。常見之單向動力元件為引擎,雙向動力元件為馬達,以下介紹引 擎與馬達之特性。
圖 3-2 車載能源淨能量密度估計 [21]
3-3-2
動力元件引擎為車輛中最常見的動力源,使用燃油作為能量來源,藉由燃油爆炸燃 燒來產生機械能提供轉速與扭力。圖 3-3 為典型的汽油引擎特性圖,引擎由特 定怠速轉速開始運作,輸出扭力隨著轉速上升並在特定轉速達到扭力最高點,
當轉速持續上升輸出扭力及開始下降,然而轉速的上升比扭力下降的速度快因
24
此引擎輸出功率仍持續上升,引擎輸出最大功率時的轉速大於輸出最大扭力的 轉速。
圖 3-3 典型汽油引擎特性圖 [22]
引擎效率
e為引擎將燃油轉換為機械能之效率,計算方式為輸出之功率除 以單位時間燃油燃燒熱,如(3.3)式所示。m
f為單位時間的油耗量,H
l為單位質量燃油燃燒熱,
T
e為引擎輸出扭力,
e為引擎輸出轉速。將引擎各轉速與扭力 之效率以效率等高線圖的方式表示,如圖 3-4。e e
e
f l
T
m H
(3.3)圖 3-4 引擎效率等高線圖[23]
25
目前有多種類的驅動馬達使用於商業市場車輛[24],圖 3-5 為馬達分類。
常用於驅動車輛的馬達種類為直流馬達(DC motor)、感應馬達(Induction motor)、同步永磁馬達(Synchronous PM)、同步有刷馬達(Synchronous brushed motor)。而磁阻馬達(Reluctance motor)雖然還沒有使用於商業車輛上,但因為其 優良的驅動特性被研究推廣。
圖 3-5 馬達分類[25]
圖 3-6 為典型馬達轉速扭力特性圖,扭力曲線表示馬達在各轉速下之扭力 上限,功率曲線表示在各轉速下最大扭力輸出之功率。在轉速低於基速(base speed)的區間馬達有固定為大扭力,而在高於基速區間有固定最大功率。馬達 物理本質上並沒有額定轉速及額訂功率,其限制來源為傳動系統所能提供的功 率以及散熱需求產生的限制,控制系統會根據電池壽命與表現做平衡。
圖 3-6 典型馬達轉速扭力特性圖
26
圖 3-7 為不同種類馬達效率趨勢圖,等高線為馬達效率曲線,圖中假設六 種馬達擁有相同之最高效率,比較其效率分布變化趨勢。(a)(b)永磁馬達在定轉 速扭力負載變化的情況下擁有較好的效率,(d)磁阻馬達在高轉速效率高,透過 控制可操作在至更高轉速,但在低轉速時效率大幅下降。(f)同步有刷馬達最高 效率比起永磁馬達低,但高效率區間範圍較大,而且擁有高轉速控制。馬達擁 有良好能量轉化效率,最高效率可達到 90%以上
圖 3-7 各種類馬達效率趨勢圖[24] (a)表面黏貼型永磁馬達 (b)內部黏貼型永磁 馬達 (c)感應馬達 (d)磁阻馬達 (e)直流馬達 (f)同步有刷馬達
3-3-3
系統負載混合動力系統根據車身參數及使用的情境面臨到不同系統負載,本研究車輛 動力系統為重,因此使用行車型態作為系統負載資料來源。行車型態是由一連串 資料點紀錄單位時間下車輛的速度所組成,世界各國組織常會針對其國內需求制 定行車型態以作為測定車輛排放與油耗的評估。行車型態的另一種應用為車輛模 擬,使用行車型態藉此模擬預測車輛傳動系統、電子驅動系統、電池的表現。行 車型態常用於底盤動力計測試車輛的排放與油耗,此類測試是在控制的環境中進 行,如測試規定的溫度與濕度,測試時控制車輛油門與煞車使車輛速度追隨行車 型態的設計速度,同時對車輪施以特定阻力來模擬行駛特定型車型態的能量耗損。
27
圖 3-8 WLTC 行車型態[26]
歐盟行車型態(New European Driving Cycle)為現今測試油耗的標準行車型態,
然而 NEDC 是由固定加速度與減速度的行車方式組成,與現實狀況複雜的加減 速行車方式不同。因此未來歐盟等國預計於 2020 年採用全球統一輕型汽車測試 程序(Worldwide harmonized Light vehicles Test Procedures),此程序定義了一個全 球統一標準的輕負載車輛測試程序,WLTP 是由隸屬聯合國的工作組織-世界車 輛法規協調論壇(World Forum for Harmonization of Vehicle Regulations)來負責制 訂與發佈[27],目的在於提供一個全球統一的測試程序。WLTP 包含了 WLTC 行 車型態(Worldwide harmonized Light vehicles Test Cycle)以及測試的標準程序,
WLTC 行車型態分為四個部分:低速、中速、高速以及超高速部分如圖 3-8 所示,
本研究將使用 WLTC 行車型態系統負載資料來源。
3-3-4 WLTC 行車型態
本小節針對 WLTC 行車型態的低速、中速、高速以及超高速部分進行分析 與比較,WLTC 行車型態為一貼近現實駕駛狀況的行車型態,其中低速部分可 視為行駛於都市內,車輛有較多停止且車速較低,中速部分可視為行駛於郊
28
區,高速部分可視為行駛於公路,超高速部分可視為行駛於高速公路。表 3.4 為 WLTC 行車型態的基本參數分析。
表 3.4 WLTC 行車型態特性參數
低速 中速 高速 超高速 總計 時間 (s) 589 433 455 323 1800 停止時間 (s) 156 48 31 7 242 距離 (m) 3095 4756 7158 8254 23262 停止百分比% 26.5% 11.1% 6.8% 2.2% 13.4%
極速 (
km h )
/ 56.5 76.6 97.4 131.3 131.3平均速度/無包含停止(
km h
/ ) 25.7 44.5 60.8 94.0 53.8 平均速度/包含停止(km h )
/ 18.9 39.5 56.6 92.0 46.5 速度標準差 12.6 17.5 25.6 33.8 36.0 最小加速度, (m s/ 2) -1.5 -1.5 -1.5 -1.2 -1.5 最大加速度 (m s/ 2) 1.5 1.6 1.6 1.0 1.6圖 3-9 顯示了 WLTC 行車型態四部份的平均速度(不包含停止時間)、速度 中位數、第一四分位數、第三四分位數、最大速度以及最小速度,四部分行車 型態起始與結束車速皆為零,可以觀察到平均速度、速度標準差以及極速隨著 低速至超高速上升,在低速、中速以及高速部份速度中位數與平均速度相近,
各車速行駛時間分布平均。而在超高速部分中位速高於平均數,反映在超高速 時車速有較長維持在高速狀態。中位數以及四分位數差距隨著低速至超高速上 升。
29
中位數 平均 上四分位
下四分位
最小值 最大值
圖 3-9 WLTC 行車型態速度分析
由車輛動力學可以計算行駛 WLTC 行車型態時車輪所需輸出的轉速與扭力,使 用車輛動力參數計算車輪轉速與扭力,圖 3-10 為行使 WLTC 行車型態時車輪 轉速與扭力的分布圖,由圖可觀察到於車輪轉速低時扭力需求高,而於車輪轉 速高時扭力需求低。各車輪轉速下最大扭力需求由低轉速至高轉速遞減,此轉 速與扭力分布方式與圖 3-6 典型馬達特性曲線圖相似。因此馬達為驅動車輛理 想的動力元件,馬達可經過簡單減速比搭配直接驅動車輛。圖 3-3 典型引擎特 性曲線圖引擎於中轉速有較高扭力輸出,因此引擎需要搭配變速箱來改變特性 曲線,以滿足車輪需求轉速與扭力的分布。
圖 3-10 WLTC 行車型態車輪轉速與扭力分布圖 0
20 40 60 80 100 120 140
低速 中速 高速 超高速
速度(km/h)
200 400 600 800 1000 1200 1400
100 200 300 400 500 600 700 800
車輪轉速 (rpm)
車輪扭力 (Nm)
30
車輛功率輸出可由曳引力與車速計算,圖 3-11 為完成 WLTC 行車型態各 速度部分所需達到平均功率與瞬間最大功率輸出,此計算假設無動能回收裝 置,由圖可見平均功率遠小於最大功率,為了滿足加速需求因而最大功率遠大 於平均功率。平均功率與最大功率都由低速至超高速遞增。平均功率與最大功 率的差異是造成較低車輛傳動效率的原因之一,為了滿足最大功率需求驅動系 統必須選用大功率引擎,引擎在低扭力運作時的效率會大幅下降。混合動力系 統可以於大功率需求時由多個動力源共同輸出,因而可以使用較小引擎。
圖 3-11 WLTC 行車型態功率需求
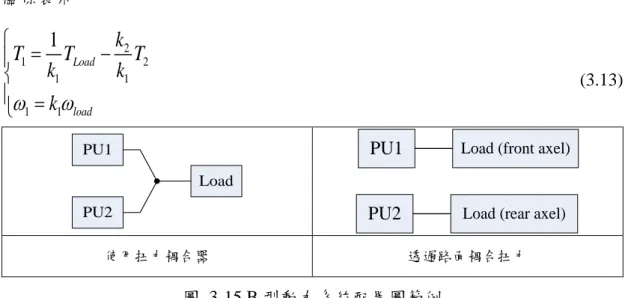
由車輛動力學可以計算車輛行駛時所需的耗能,車輛行駛時必須克服行車 阻力以及滿足對車速的要求。為了能夠比較不同行程距離之行車型態,計算完 成行車型態的總能量消耗除以行駛距離,也就是行駛單位距離所消耗的能量。
total total
E E
x
(3.4)1 t( ) ( )
total t tractive
E F t v t dt
x
(3.5)其 中
x
total 是 行 車 型 態 的 總 路 徑 長 ,F t
t( )
是 車 輛 再 在t
秒 時 的 曳 引 力 ,t tractive
是車輛動力元件輸出能量的時間,也就是F t
t( ) 0
的時間。行車型態給予的資料為固定時間點時的瞬間車速
v t ( )
i v
i;t
i i h
;0
10 20 30 40
低速 中速 高速 超高速
功率(kW)
平均功率 最大功率
31
i=0, ,n, h 為固定時間的大小,在 WLTC 型車型態中為 1 秒,
n
為型車型態的 資料長度。將車輛曳引力離散化可計算平均曳引力近似值。(t)=F = + + +
t i a r g
F R R R W a
g
(3.6)1
i i
i tractive total
E F v h
x
(3.7)將式(3.9)化分為兩部分並且假設行駛在水平面上省略爬坡阻力,行車阻力 為空氣阻力與滾動阻力以及慣性阻力。
, ,
1 1
( a i r i) i i i
i tractive i tractive
total total
E R R v h ma v h
x
x
(3.8)行駛單位距離平均消耗的能量可整理為兩部分
diss circ
E E E
(3.9)第一部份為滾動阻力與空氣阻力,最終將轉化為熱能而散失,第二部分為 慣性阻力,慣性阻力為車輛在加速時所消耗的能量,此能量轉化為車輛之動 能,當車輛減速時如有能量回收元件可將此能量回收。使用表 4.3 之參數計算 消耗之能量。圖 3-12 為 WLTC 行車型態單位距離所需耗費的能量,為空氣 阻、滾動阻力以及慣性阻力之和。空氣阻力大小由低速至超高速遞增,慣性阻 力由低速至超高速遞減,滾動阻力小幅上升。總體單位距離耗能超高速最大。
圖 3-12 WLTC 單位距離消耗能量
5% 13% 33%
53%
20% 22%
27%
21%
75% 65% 40%
25%
0 100 200 300 400 500
低速 中速 高速 超高速
J/m
單位距離空組耗能 單位距離滾阻耗能 單位距離慣阻耗能
![表 1.1 以電子化程度比較油電混合動力系統[4]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603214.629606/21.892.134.786.114.435/表11以電子化程度比較油電混合動力系統4.webp)
![圖 3-8 WLTC 行車型態[26]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603214.629606/45.892.168.783.116.489/圖38WLTC行車型態26.webp)
![圖 5-2 新型混合動力系統中混合動力單元剖面視圖[35]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603214.629606/102.892.222.784.111.490/圖52新型混合動力系統中混合動力單元剖面視圖35.webp)
![圖 5-8 ADVISOR 內建 Toyota Prius 車輛傳動模型[23]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9603214.629606/109.892.185.710.387.664/圖58ADVISOR內建ToyotaPrius車輛傳動模型23.webp)