1國家實驗研究院國家太空中心 助理研究員 收到日期:民國 102 年 08 月 31 日
2國家實驗研究院國家太空中心 助理技術師 修改日期:民國 103 年 03 月 15 日
接受日期:民國 103 年 12 月 22 日
*通訊作者, 電話: 03-5784208, E-mail: [email protected]
福衛二號立體取像與影像精度
周士傑
1*劉蒨蒨
2摘 要
立體影像為利用感測器針對同一目標物,進行多次拍攝,因其拍攝視角不同而導致不同視差,可藉 由其相對幾何關係得到目標物的高程資訊,在一般航空攝影中,基高比 (B/H ratio) 為度量所產製的影像 其高程資訊所可得到的理論精確度,然而對遙測衛星而言,其飛行高度相對於地球半徑並非不可忽略,
同時所拍攝的目標物並不一定在軌道下方,因此單純基高比並不足以做為憑斷立體影像精度的指標,本 文將以福衛二號拍攝之立體影像為例子,分析其拍攝方式與其精度的關係。
關鍵詞:福衛二號、立體對取像、排程、數值高程模型
1. 衛星立體取像
人造衛星依照其任務設計,在距離地表 400 到 1000 公里高度的軌道上運行執行任務,並且現 行高解析力人造衛星大部分具備俯仰角以及滾轉 角轉動的能力,因此可以對座落於視角範圍內的任 意目標物進行取像;以福衛二號為例,自 2004 年 發射升空開始執行拍攝任務以來,到目前為止,其 拍攝地面資料範圍已經超過全球陸地的 45%,然 而其中大部份的資料均為經由轉動衛星本體所拍 攝產生之斜照影像,這些資料雖然不可避免的造成 幾何對位上的困難上,但另一方面,若在後序資料 處理上加入相關拍攝資訊,則在詮釋資料本身方面 卻可帶來一些益處。衛星本體在相距一特定距離,
以不同姿態拍攝目標區域時,則稱為立體對取像,
而經由多次取像間所產生的視差,則可以得到目標 區域的高程資訊。
一般被動式感測器不管其類型如何,若為單一 次取像,所取得之資訊僅具備目標物的二維資訊;
然而若可針對同一目標物,進行多次拍攝,因其拍 攝視角不同而導致不同視差,可藉由其相對幾何關 係得到目標物的高程資訊,此即為立體對拍攝。對
於遙測衛星而言,因為其軌道穩定且可預測,利用 衛星本身機動性可於不同位置,針對同一地點進行 沿軌及跨軌拍攝;一般而言,使用愈大的視角拍攝 將會導致愈大的視差,由基本的三角測量法得知,
地物高程資訊 (DEM) 的誤差反比於兩次拍攝感 測器間的距離,而正比於與感測器與目標物間的距 離 (K. Jacobsen, 2003),如圖 1 所示。
圖 1 測量高度與視差間的關係
利用光學遙測 立體影像 取 像所得 到之地 形 DEM 其精度理論值為 (Mitshuharu , 1996):
DEM 精度 = (影像地面解析度 )/
(取像基高比) * (匹配精度) (1) 由式(1)可知,取像基高比為衛照與航照在拍
攝前,評估所萃取 DEM 精度時的重要參數。
為了精確計算基高比,我們可參照圖 2 所示之 三維卡氏座標 ,若將拍攝目標物設於原點上,衛 星方向可以用兩個參數來表示,分別為方位角 Az 以及入射角β;方位角為正北方向為起始點,順時 針方向到目標方向的水平夾角,仰角則是視線與水 平面的夾角,入射角為其補角。這些參數可在包含 福衛二號在內的許多衛星影像標準產品的詮釋檔 中找到。
圖 2 三維卡氏座標,拍攝目標物設於原點上
同時,衛星與地面目標物的距離可表示為:
‖S⃗ ‖ = (R + H)sin(𝜂−𝜑)sin 𝜂 (2)
其中 R 為地球半徑, H 為衛星水平高度,α 為 衛星視角;以福衛二號為例 ,H=891 km。因此衛 星位置向量可以表示為式(3)。
𝑆 = [
‖𝑆‖ sin(η) sin(𝐴𝑧)𝑋̂
‖𝑆‖ sin(η) cos(𝐴𝑧)𝐴𝑧𝑌̂
‖𝑆‖ cos(η) 𝑍̂
] (3)
以沿軌立體像對而言,假設目標物位於軌道正下方,
如圖 3 所示為衛星立體對取像幾何關係,假設衛星 於時間 t1 位置 S1時 ,以視角度 𝜙1取得第一張影 像;於時間 t2位置 S2時,以視角度 𝜙2取得第二 張影像。因此兩取像點的距離為
B = ‖S⃗ (t1) − S⃗ (t2)‖ = ‖S⃗⃗⃗ − S1 ⃗⃗⃗ ‖ (4) 2
因此 基高比可定義為:
B H
⁄
=‖
𝑆⃗⃗⃗
− 𝑆⃗⃗⃗ ‖ ( ⁄
+)
(5)圖 3 立體對取像的幾何關係
然而就衛照而言,因人造衛星高度較高,除了 必須考慮地球曲率外:兩次拍攝位置對於拍攝地物 並不一定呈現對稱的幾何形態;並且拍攝目標物不 一定位於軌道下方;因此一般而言,除了基高比外,
我們亦需要考慮下另四個參數:roll angle (RA)、
asymmetry angle (AA)、convergence angle (CA)、
bisector elevation angle (BIE) ; 其幾何關係如圖 4 所示(J Malcolm Cain 1989)。
圖 4 立體取像的幾何模型
在圖 4 中,取像目標物與其在兩像平面位置上 的投影點所形成的一假想平面稱為核面 (epipolar plan),核面與衛星軌道面所形成的夾角稱為 Roll angle (RA) Ω;convergence angle (CA) γ 為目標點 與取像點兩向量所形成的夾角,其代表相對於目標 物而言,兩取像位置的視角差; bisector ray 定義 為在核面上 convergence angle γ 的角平分線,
normal ray N̂定義為在核面上與核面及目標平面交 線垂直的直線;asymmetry angle α 定義為 bisector 與 normal ray N̂之夾角;bisector elevation angle (BIE) β 為 bisector ray 與拍攝目標物所在地平面 所形成的夾角。 由圖 3 所定義的位置向量,各幾
何參數及其關係可表示為:
β = sin−1[(‖𝑆𝑆⃗⃗⃗⃗ 1
⃗⃗⃗⃗ ‖1 +‖𝑆𝑆⃗⃗⃗⃗ 2
⃗⃗⃗⃗ ‖2 ) ∙ 𝑍̂] (6) (𝑆⃗⃗⃗ × 𝑆1 ⃗⃗⃗ ) × (𝑍̂) ⋅ 𝑁̂ = 0 (7) 2
Ω = sin−1[‖𝑆𝑆⃗⃗⃗⃗ ×𝑆1 ⃗⃗⃗⃗ 2
⃗⃗⃗⃗ ×𝑆1 ⃗⃗⃗⃗ ‖2 ∙‖𝑍̂‖𝑍̂ ] (8)
α = cos−1[‖𝑆𝑆⃗⃗⃗⃗ +𝑆1 ⃗⃗⃗⃗ 2
⃗⃗⃗⃗ +𝑆1 ⃗⃗⃗⃗ ‖2 ∙ 𝑁̂] (9)
γ = cos−1[|𝑆𝑆⃗⃗⃗⃗ ∙𝑆1⃗⃗⃗⃗ 2
⃗⃗⃗⃗ ||𝑆1 ⃗⃗⃗⃗ |2] = η1+ η2 (10) 所有這些拍攝參數彼此存在相互的幾何關係,
由圖 4 可知 asymmetry angle α、roll angle Ω 與 convergence angle γ 可決定唯一的取像幾何型態。
如 同 基 高 比 於 傳 統 航 空 攝 影 的 角 色 , bisector elevation angle (BIE) β 與 convergence angle γ 代 表遙測衛星立體影像匹配與數值高程模型精度指 標。交會角γ 代表水平方向的視差,當立體對影像 取像時,若交會角γ 較大,對於高程定位時效果會 較好;然而,若交會角γ 過大時,兩張影像的差異 性亦較大則不利於影像匹配。另一方面 BIE β 值 可視為在交會角γ 固定下,兩張影像因垂直方向視 角不同所造成視差的指標,當β=0 時即表示到拍攝 目標位於軌道面上,同時兩次取像相對於目標物呈 現對稱幾何關係,另一方面 BIE β 值可由 roll angle Ω 以及 asymmetry angle α 決定,其關係如 圖 5 所示 ,圖 5 的等值線顯示不同的 roll angle Ω 以及 asymmetry angle α 組合亦可得到相同的 BIE 值,其變化曲線以水平對角線對稱。
我們可藉由 β-γ 值作為量度立體對取像的指 標,其值通常藉於最大值 90 度到一最小值 X 之 間,β-γ 值越小,兩張影像視差越大,X 值可視為 一指標,代表可完成影像匹配之兩影像最大視差(J Malcolm Cain ,1989)。
90 ≥ β − γ ≥ X (11)
同時為了成功取得數值高程模型,當遙測衛星
執行立體對拍攝任務時,convergence angle γ建議 保持在 30 到 60 度間,asymmetry angleα應小於 20 度 , BIE β 應 該 介 於 60 到 90 度 間 (GEOIMAGE, 2010)。
圖 5 bisector elevation angle (BIE)
2. 福衛二號立體對取像實例
福衛二號從 2004 年開始執行拍攝任務以來,
可利用衛星姿態控制能力,執行多次沿軌或跨軌的 立體影像拍攝。本研究共蒐集八組福衛二號立體對 影像之相關文獻回顧,如表 1 所示。其中五組為 台灣地區的立體對影像,另外三組則為位於北極圈 內,格陵蘭島的 Kangerdlugssuaq 冰川。
表 1 所列之文獻,皆為利用福衛二號立體對影 像,經由幾何糾正、影像匹配後所產生的數值地表 模型(DSM),台灣地區可利用航測所得的 DSM 資 料,進行數值地表模型(DSM)精度評估與檢核;透 過精度評估可了解福衛二號於不同地形環境的高 程誤差,評估福衛二號於各地形環境中所萃取的高 程資料適用性與影像品質。
地面控制點是衛星立體對影像產製數值地表 模型(DSM)的重要根據,而表 2 所列的資料內容,
可看出參考台灣的研究區域影像是參考已知的地 面控制點資料產製,因此各研究中所求得的數值地 表模型(DSM)之均方根誤差(RMSE)的差異不大,
不過福衛二號立體對影像所產製的數值地表模型 (DSM)仍受到地形坡度影響其精度。而研究區域影 像位於北極圈格陵蘭島的 Kangerdlugssuaq 冰川由 於地面控制點取得不易,該研究利用第一天的影像
作為基礎,與第二天與第三天之影像進行比較,僅 能看出極區冰川快速變化之情況(鄭鈺雯,2008),
無法確切得知福衛二號立體對影像所產製的數值 地表模型(DSM)與實際地表高程之差異。
數值地表模型(DSM)主要萃取拍攝影像當日 的地表高程,根據研究顯示造成福衛二號衛星立體 對之高程誤差較大的原因包含下列:
(1)取像當日之雲覆率及陰影。
(2)土地利用開發影響與環境變化。
(3)人為建物較多的區域。
(4)山脊、山谷與坡度較大之地形區域。
由於研究區域的不同,因此各研究中所使用的 地面控制點資料的精度與標準不同,造成福衛二號 立體對影像於不同研究區域內的高程精度亦不盡 相同(表 2)。
然而,研究發現福衛二號之立體對影像對於丘 陵區與山區邊坡的大規模崩塌量檢測上是有所幫 助的;即便使用不同日的影像所組成之立體像對,
其所產製的數值地表模型(DSM)仍可將道路橋樑、
河道特徵等萃取出來,顯見福衛二號於不同日期取
像之立體像對亦具有相當應用價值。
在實作上,精度大小同時受到不同因數的影響,
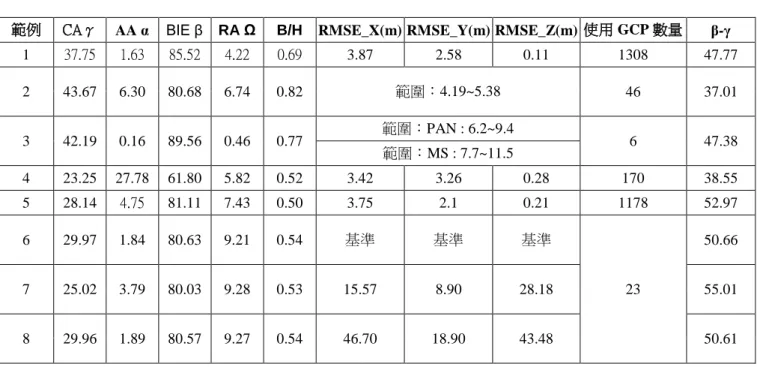
除了取像參數的限制外,包含地貌、使用 GCP 的 數量與品質、影像輻射條件等都與產製數值地表模 型(DSM)的精確度息息相關。 表 2 列出表 1 立體 對影像的各項拍攝參數,及其實作誤差。範例 1、
範例 4、範例 5 是屬於同一研究,其研究之 RMSE 誤差總值為 5.6~19.9,因為研究地區之地形包含平 原與山區,所以 RMSE 誤差範圍較大。而範例 2 與範例 3 由於研究地區地形起伏相較之下沒這麼 大,因此 RMSE 誤差範圍較小;由各研究中顯示,
地形亦是 RMSE 的重要影響因素之一。
一般而言, B/H 、BIE、CA 均為拍攝幾何關 係的參考指標; B/H 值越大,GCP 使用數量越多,
可以有較小的誤差;但另一方面,由範例 4 中可以 看出,雖然其 B/H 不佳,但其 BIE 值較低,可以 提供兩張影像好的視差條件,加上適當的控制點使 用,仍然可以有好的精度表現。另外,範例 2 中可 知,其β-γ數值可以到達 37.01,其值亦可以做為 往後福衛二號立體取像的參考指標。
表 1 福衛二號立體對影像資訊
範例 日期 文獻來源 拍攝地點 經緯度 高度 拍攝時間 衛星
滾轉角
衛星 俯仰角 1 2005/1/6 陳柏澧,2009 高屏溪 22.598,
120.438 2m 01:45:55 -5.04 16.04 01:47:16 -2.92 -16.87 2 2007/2/6 莊宗達,2008 通霄鎮, 苗栗 24.488,
120.676 20m 02:03:53 -6.96 19.36 02:05:29 -4.42 -19.27 3 2004/11/5 陳世師,2006 台灣北部 25.143,
121.413 193m
01:42:59 -1.37 18.11 01:44:30 0.92 -18.56 4 2007/1/9
陳柏澧,2009 曾文水庫 23.301,
120.576 210m 02:03:45 -5.18 -0.07
2007/1/11 02:02:47 -6.67 23.52
5 2007/1/8
陳柏澧,2009 濁水溪 23.804,
120.481 30m 02:03:51 -6.57 -0.09
2007/1/11 02:04:54 -4.86 -23.52
6 2007/8/17 鄭鈺雯,2008 Kangerdlugssuaq, Greenland 68.6828,
-33.1201 676m
13:54:57 7.64 13.38 13:56:02 8.22 -13.11 7 2007/8/18 鄭鈺雯,2008 Kangerdlugssuaq, Greenland 68.6828,
-33.1201 676m 13:54:59 7.66 13.38 13:56:03 8.24 -12.73 8 2007/8/19 鄭鈺雯,2008 Kangerdlugssuaq, Greenland 68.6828,
-33.1201 676m
13:55:01 7.69 13.43 13:56:06 8.26 -13.06
表 2 拍攝參數與誤差
範例 CAγ AA α BIE β RA Ω B/H RMSE_X(m) RMSE_Y(m) RMSE_Z(m) 使用 GCP 數量 β-γ 1 37.75 1.63 85.52 4.22 0.69 3.87 2.58 0.11 1308 47.77 2 43.67 6.30 80.68 6.74 0.82 範圍:4.19~5.38 46 37.01
3 42.19 0.16 89.56 0.46 0.77 範圍:PAN : 6.2~9.4
6 47.38 範圍:MS : 7.7~11.5
4 23.25 27.78 61.80 5.82 0.52 3.42 3.26 0.28 170 38.55 5 28.14 4.75 81.11 7.43 0.50 3.75 2.1 0.21 1178 52.97 6 29.97 1.84 80.63 9.21 0.54 基準 基準 基準
23
50.66
7 25.02 3.79 80.03 9.28 0.53 15.57 8.90 28.18 55.01
8 29.96 1.89 80.57 9.27 0.54 46.70 18.90 43.48 50.61
3. 結論
將遙測衛星於不同時間拍攝的影像,利用其拍 攝角度不同而產生視差的關係,萃取出數值高程模 型,而數值高程模型的精度除了與影像後處理方法 及控制點使用數量有關,亦與取像的幾何模型息息 相關;取像的幾何參數往往決定後續高程資料的精 度及適用性;因此在排程可行性評估作業中,分析 其拍攝的幾何關係,實為一重要工作;太空中心目 前正極力發展福衛五號衛星系統,預定 2016 年發 射執行拍攝任務,屆時將與福衛二號形成星系,可 利用兩顆衛星的軌道特性,對同一地點進行拍攝,
形成立體影像;福衛二號從 2004 年開始執行拍攝 任務以來,憑藉其靈活的姿態變化能力,累積許多 以不同視角對不同地形地貌拍攝的影像資料,經由 對排程取像的分析結果以及歷年利用福二影像產 製高程模型的經驗,將對未來結合不同衛星資料的 相關應用發展有所助益。
參考文獻
莊宗達,2008,碩士論文,福衛二號立體像對產製 數值地表模型之適用性分析,國立台灣師範大
學地理學系。
陳世師,2006,碩士論文,福爾摩沙衛星二號立體 像對產生數值地形模型之精度研究,國立台灣 大學地理環境資源學研究所。
陳柏澧,2009,碩士論文,福爾摩沙二號衛星數值 地表模型與正射影像產品之產製與精度評估,
國立成功大學衛星資訊暨地球環境研究所。
鄭鈺雯,2008,碩士論文,福衛二號影像求定極地 地區物點點位之品質評估,國立成功大學測量 及空間資訊學系。
GEOIMAGE, 2010, Digital Elevation Models from satellite Imagery.
http://www.geoimage.com.au/media/brochure_p dfs/Geoimage_DEM_brochure_Oct10_LR.pdf Joel Malcolm Cain, 1989, Stereomodel Acquisition
Geometry, Ph.D. thesis, U.C. Berkeley.
K Jacobsen , 2003, DEM Generation from Satellite Data, EARSeL Ghent 2003, Remote Sensing in Transition, Millpress ISBN 90-77017-71-2, 273 – 276.
T Mitshuharu, and H Seiich , 1996, DEM accuracy derived from ASTER data, ACRS, Geoscience/DTM
1 Assistant Researcher, National Applied Research Laboratories, National Space Organization Received Date: Aug. 31, 2013
2 Assistant Technologist, National Applied Research Laboratories, National Space Organization Revised Date: Mar. 15, 2014
3 Research fellow, National Space Organi Accepted Date: Dec. 22, 2014
*.Corresponding Author, Phone: 886-3-5784208, E-mail: [email protected]
FORMOSAT-2 Stereo Acquisition Geometry and Image Geometric Accuracy
Shih-Chieh Chou 1* Chian-Chian Liou 2
ABSTRACT
For the remote sensing satellite, it is a practical scheme where two images acquired at different time from either same orbit or different orbit. Due to the stable and predicted satellite orbit, the same location area usually detected with different perspective by different predefined attitude. It induced the displacement in the image plane of optical system. The higher the elevation, the large the parallax induced. In aerial photography, elevation accuracy is greatly influenced by the base-height ratio. However, considering the acquisition geometry of satellite stereo pair, it is obvious that not only base-height ratio but also other parameters have great impacts on performance of geometric accuracy. In this article, the analysis of acquisition geometry of stereo model was given. Furthermore, we also present various case studies regarding FORMOSAT-2 stereo images in pass few years and analyze the acquisition geometry parameters.