國 立 交 通 大 學
電機與控制工程研究所
碩 士 論 文
採用Σ-Δ調變之全橋式5.1聲道
D類音頻放大器
A Full-Bridge 5.1 Channel Class-D Audio Amplifier
Using Sigma-Delta Modulation
研 究 生: 朱 家 弘
指導教授: 胡 竹 生 博士
採用Σ-Δ調變之全橋式5.1聲道D類音頻放大器
A Full-Bridge Class-D Audio Amplifier in 5.1 Channel Using
Sigma-Delta Modulation
研 究 生:朱 家 弘
Student:Chia-Hung, Chu
指導教授:胡 竹 生 博士
Advisor:Prof. Jwu-Sheng, Hu
國立交通大學
電機與控制工程學系
碩 士 論 文
A ThesisSubmitted to Institute of Electrical and Control Engineering College of Electrical Engineering and Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical and Control Engineering July 2006
Hsinchu, Taiwan, Republic of China
採用Σ-Δ調變之全橋式5.1聲道
D 類音頻放大器
研究生:朱 家 弘 指導教授:胡 竹 生 博士 國立交通大學電機與控制工程研究所碩士班摘
要
本論文以Σ-Δ為調變基礎來設計D 類音頻放大器。D 類放大器不是使用 電晶體的線性工作區,而是將其當作開關來放大,有效率高、設計較易的優勢。 D 類放大器前級需要一個調變器將任意訊號調變成切換式開關訊號以供輸入, 而相較於常用的 Pulse-Width Modulator,Σ-Δ調變器沒有固定的諧波干擾, 且擁有較低的切換次數。在Σ-Δ調變器產生切換式訊號的量化過程中,會有 量化誤差的問題,所以本論文以一理想之 Noise Shaping 量化演算法為推導基 礎,分析在無限大的取樣頻率下,其量化誤差如何藉由回授機制、迴圈轉移函 數來改變其能量分佈,由其衍生出有限取樣頻率之數位Σ-Δ調變理論與其穩 定性分析,並得到最佳的訊號雜訊比。本論文將於 FPGA 實現穩定的數位式Sigma-Delta Modulator DAC,並配合 USB 六聲道音頻控制器與全橋功率放大
A Full-Bridge Class-D Audio Amplifier in 5.1 Channel
Using Sigma-Delta Modulation
Student: Chia-Hung Chu Advisor: Prof. Jwu-Sheng Hu
Institute of Electrical and Control Engineering National Chiao-Tung University
ABSTRACT
This thesis designs a Class D audio amplifier based on Sigma-Delta Modulator. Instead of working in saturation mode, the transistors of Class D amplifiers operate in the triode and cut-off modes, which is more efficient in terms of energy conversion and has lower cost. Modulators that modulate any signal to a binary signal are needed for Class D amplifiers. However, compared with traditional Pulse-Width Modulator, Sigma-Delta Modulator produces less harmonic distortion and needs fewer number of switching. The quantization scheme in Sigma-Delta Modulator has the impact of quantization errors. Considering a time-optimal quantization algorithm, the in-band quantization errors can be completely eliminated by designing the loop filter running at infinitely high sampling frequency. In this thesis, a Sigma-Delta Modulator is analyzed by modeling a Sigma-Delta Modulator as an approximation of a time-optimal quantizer and its stability criterion is derived. Moreover, a USB based 5.1 channel Class D amplifier which contains a stable digital Sigma-Delta Modulator DAC with FPGA, a six channel USB audio controller, and a switching power stage is also implemented in this thesis.
誌 謝
終於鬆了一口氣,這一陣子日以繼夜、焚膏繼晷的日子終於在一片恭喜聲中落幕 了,當然需要改進的地方仍然很多,但努力的結果也受到了不少肯定。 雖然要感謝的人很多,除了謝天之外,還是要一一地感謝所有人。首先當然要感 謝的當然是各位撥空參加的口試委員白明憲、鄒應嶼、張隆國、陳科宏等老師,謝謝 你們的指教與肯定,有你們的到來與審核才讓敝人小弟在下我有機會通過考驗。 而最應該感謝的人,當然是胡竹生老師,感謝老師這兩年來的忍耐與教導,雖然 我經常打混摸魚,而看在眼裡的老師仍然一直非常有耐心並且客氣地教導我許多做學 問的技巧,在循循善誘之下,我總算爭氣得畢業了,真的由衷地謝謝老師的指教,才 讓我習得當今正燙手的學問D 類放大器。 正所謂承先啟後,接下來當然一定要感謝同為數位放大器組的各位先驅,超強的 順智、美麗的岑思、嫵媚的鏗元,沒有你們的傳承就沒有今天的我,尤其要謝謝鏗元 的幫忙,在多次遇到瓶頸的情況下,都是在學姊的幫忙下度過難關,亦師亦友。 另外當然要感謝實驗室的各位夥伴,博士班學長:專利多到不像話的立偉、有點 變形但學問滿溢的宗敏、閃亮亮聯發科的帥帥价呈、鬼才又超會哈拉的維瀚、有車子 沒馬子的興哥、常被我麻煩的育德;一起奮鬥的同學:超難約的佩靜、會飛的鳥蕙、 文靜的螞蟻、熱心助人的恒嘉、像包偉銘的耀賢、為人厚道的永融;還有學弟:小強 弘齡、小P 楷祥、Alphar 兄;實驗室助理淑伶;尤其要感謝宗敏,在我人生最脆弱的 時候給予我許多理性與正面的思考,當然也要感謝其他夥伴們陪我度過這一段不快樂 的日子,謝謝你們的肩膀與依靠,我愛你們,有你們在真好。 當然還要感謝已經不在身邊的她,粘,謝謝妳一路走來的肯定與鼓勵,妳一向是 我支持下去的動力,很遺憾今後只剩下自己一人,但我仍會繼續努力下去。 這一陣子得到了很多東西,也同時失去了不少東西,我不知道得到的是否比失去 多,但我會努力揮別過去,自己繼續勇敢地一步一步往上爬。目 錄
摘 要...i ABSTRACT...ii 誌 謝...iii 目 錄...iv 表 列...vi 圖 列...vii 第一章 緒論... 1 1.1 研究動機 ... 1 1.2 研究內容與目標... 4 1.3 論文貢獻 ... 5 1.4 章節概要 ... 6 第二章 D 類放大器前級調變理論... 72.1 PULSE-WIDTH MODULATION (PWM) ... 7
2.2 MULTI-STEP OPTIMAL CONVERTER (MSOC) ... 10
2.2.1 區間二次倒回(Receding Horizon Quadratic)最佳化控制 ... 10
2.2.2 MSOC 系統架構... 11
2.3 SIGMA-DELTA MODULATION (SDM) ... 14
2.3.1 SDM 之發展由來... 14 2.3.2 SDM 之概念與效果... 17 2.4 各方法分析與比較... 18 第三章 SDM 調變原理與設計... 19 3.1 SDM 調變器的順滑模態與最佳模態理論 ... 19 3.1.1 具時間最佳化之 Noise Shaping 量化機制... 20 3.1.2 1 階數位化量化器 ... 21 3.1.3 n 階數位化量化器與系統化簡 ... 23 3.1.4 SDM 之穩定條件... 25 3.2 數位Σ-Δ調變器 NOISE-SHAPING與狀態變數限制... 27 3.2.1 從輸出觀點來看 n 階 Noise Shaping 效果... 27 3.2.2 系統各階狀態表示式與穩態 ... 28 3.3 設計方法 ... 30 3.3.1 迴路濾波器(Loop Filter)設計 ... 30
3.3.2 最佳化雜訊轉移函數(Noise Transfer Function)零點位置 ... 31
3.3.3 n 階 SDM 系統之設計流程... 32
4.1 1.5-BIT量化機制... 33
4.1.1 1.5-bit 量化概念... 33
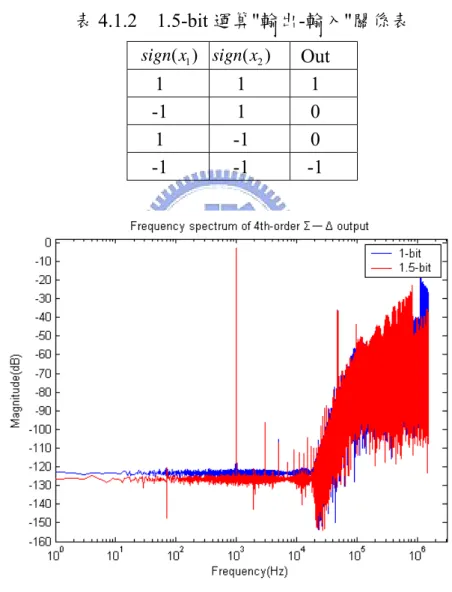
4.1.2 1.5-bit 量化運算... 35
4.1.3 SDM 的 1.5-bit 量化運算 ... 36
4.2 1.5-BIT三元(TERNARY)轉四元(QUATERNARY)切換機制... 37
4.3 效能量測標準... 42 4.4 系統階數的選擇... 43 4.4.1 階數與效能 ... 43 4.4.2 階數與振幅大小 ... 45 4.5 高通 NOISE SHAPING截止頻率的選擇... 47 4.5.1 截止頻率與振幅大小 ... 48 4.5.2 截止頻率與效能 ... 48
4.6 四階數位 SIGMA-DELTA MODULATOR設計模擬... 49
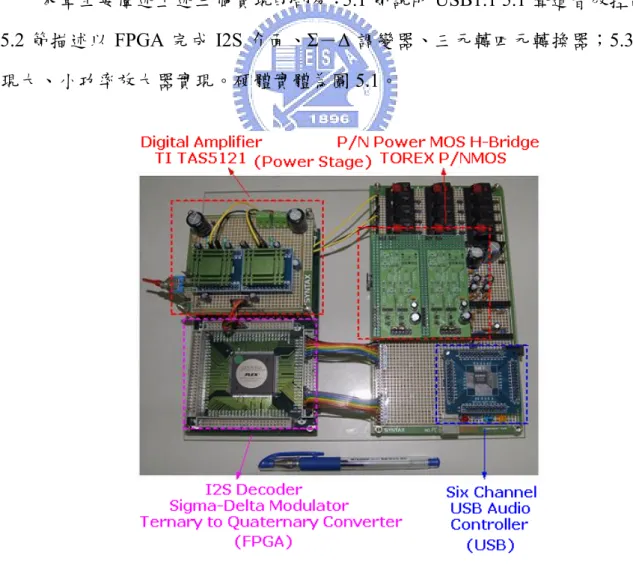
第五章 5.1 聲道音頻放大器硬體架構與實現 ... 53
5.1 USB1.1 5.1 聲道音效控制器 ... 54
5.1.1 硬體介紹:SONIX SN11116... 55
5.1.2 I2S (Inter-IC Sound)介面... 56
5.1.3 支援 5.1 聲道之應用軟體:Sonix Sound Station ... 58
5.2 FPGA 核心實現... 59
5.2.1 硬體介紹:Altera FLEX10K Emulation Board... 59
5.2.2 軟體介紹:MAX plusII... 60
5.2.3 FPGA 實作 ... 61
5.3 功率放大級 ... 66
5.3.1 硬體介紹:(1)TI TAS5121;(2) TOREX P/N Power MOS... 66
5.3.2 功率放大級實作 ... 68 第六章 效能量測與比較... 71 6.1 訊號效能量測... 71 6.1.1 調變級邏輯量測與效能計算 ... 71 6.1.2 放大級三元與四元切換電壓量測比較 ... 73 6.2 放大級效率 ... 76 6.2.1 TI TAS5121 輸出輸入功率... 76
6.2.2 TOREX P/NMOS H-Bridge 輸出輸入功率... 78
第七章 結論... 82
7.1 研究成果 ... 82
7.2 未來展望 ... 83
表 列
表2.4.1 訊號調變法比較表... 18 表4.1.1 輸出 y[n]狀態與後級 CMOS 有效輸入比照表 ... 34 表4.1.2 1.5-bit 運算"輸出-輸入"關係表 ... 37 表4.2.1 產生殘差電壓的狀態轉換表... 39 表4.2.2 四元切換狀態轉換表... 40 表4.4.1 1~5 階的 Σ-Δ 調變器效能比較表 ... 44 表4.4.2 1~5 階的 Σ-Δ 調變器振幅比較表 ... 47 表4.5.1 高通 Noise-Shaping 截止頻率與振幅比較表... 48 表4.5.2 高通 Noise-Shaping 截止頻率與效能比較表... 49 表4.6.1 四階 Σ-Δ 系統係數... 51 表5.1.1 TYPE 2、3 參照 SN11116 運作模式 ... 55 表5.2.1 四階 Σ-Δ 調變器實作係數... 62 表6.1.1 調變級各種切換機制效能比較表... 73 表6.2.1 TOREX P/NMOS 輸入電壓 v.s.輸出效率(系統頻率 1.536MHz)... 81 表6.2.1 TOREX P/NMOS 輸入電壓 v.s.輸出效率(系統頻率 3.072MHz)... 81圖 列
圖1.1.1 類比音響系統... 1 圖1.1.2 類比功率放大器工作偏壓... 2 圖1.1.3 D 類放大器... 3 圖1.1.4 全數位化音頻擴大器系統... 3 圖1.3.1 實作的組成結構;其中虛線部份為實做完成的部分 ... 5 圖2.1.1 Pulse-Width Modulator 示意圖... 7 圖2.1.2 NPWM 與 UPWM 運作圖[10] ... 8 圖2.1.3 PWM 輸出頻譜響應圖(三角波頻率= 48kHz × 8,解析度= 25)... 8 圖2.1.4 NPWM 與 UPWM 運作圖[12] ... 9圖2.2.1 MSOC with Feedback Loop ... 13
圖2.2.2 MSOC 輸出頻譜響應圖(2-order, N=2)... 13
圖2.3.1 Delta Modulator DAC 方塊示意圖... 14
圖2.3.2 Delta Modulator 操作機制 ... 15 圖2.3.3 Delta Modulator 之問題 ... 15 圖2.3.4 Inose Δ 調變器 ... 16 圖2.3.5 (i)一階 Σ-Δ 調變器 (ii) 一階數位 Σ-Δ 調變器 ... 16 圖2.3.6 n 階數位 Σ-Δ 調變器... 16 圖2.3.7 一階與二階 Σ-Δ 輸出頻譜響應圖... 18 圖3.1.1 1-bit Noise-Shaping 量化機制 ... 20 圖3.1.2 Noise-Shaping 概念... 21 圖3.1.3 1 階 Time-Optimal 量化器... 21 圖3.1.4 1 階數位 Σ-Δ 調變器... 22 圖3.1.5 n 階 Time-Optimal 量化器... 23 圖3.1.6 n 階 Time-Optimal 量化器等效方塊... 24 圖3.1.7 (a) n 階數位 Σ-Δ 調變器 (b) n 階數位 Σ-Δ 調變器等效方塊圖 ... 25 圖3.2.1 −1 W 之頻率響應 (a)零點皆在 z = 1 (b)零點在最佳位置 ... 28
圖3.3.1 Additive Noise Model... 30
圖4.1.1 切換訊號與開關波形關係圖... 34 圖4.1.2 德州儀器差動調變方塊示意圖... 35 圖4.1.3 德州儀器的差動調變方法... 35 圖4.1.4 Apogee 的三元調變與傳統 PWM 運作比較 ... 36 圖4.1.5 1-bit 與 1.5-bit 系統輸出之頻譜圖 ... 37 圖4.2.1 狀態 0 切換機制... 38 圖4.2.2 PMOS 導通、NOMS 截止的三元切換 ... 38 圖4.2.3 全橋四元切換控制... 39
圖4.2.4 P/NMOS 匹配輸出頻譜... 41 圖4.2.5 P/NMOS 不匹配輸出頻譜(a)三元切換 (b)四元切換 ... 41 圖4.2.6 P/NMOS 不匹配誤差電壓頻譜(a)系統頻寬內 (b)音頻 20kHz 內... 41 圖4.4.1 -3dB FS 1kHz Sine Wave 的切換輸出頻譜圖... 44 圖4.4.3 -60dB FS 1kHz Sine Wave 的切換輸出頻譜圖... 45 圖4.4.3 -96dB FS 1kHz Sine Wave 的切換輸出頻譜圖... 45 圖4.4.4 1~5 階 Σ-Δ 調變器低通濾波的時序圖 ... 47 圖4.6.1 雜訊轉移函數頻率響應圖... 49 圖4.6.2 完整四階 Σ-Δ 系統設計等效示意圖... 51 圖4.6.3 電路實現架構圖... 51 圖4.6.4 Σ-Δ 系統各階狀態變化圖... 51 圖4.6.5 (a)1.5-bit 輸出頻譜與|W−1(ejw)|(紅色) (b)音頻時域圖... 52 圖5.1 5.1 聲道音頻放大器實體圖... 53 圖5.1.1 SN11116 接腳圖[29]... 54 圖5.1.2 SN11116 方塊圖[29]... 55 圖5.1.3 I2S 的連接 ... 57 圖5.1.4 I2S 傳輸機制 ... 57
圖5.1.5 Sonix Sound Station v1.61.4... 58
圖5.2.1 Altera FLEX10K Emulation Board ... 59
圖5.2.2 MAX plusII 使用介面... 60 圖5.2.3 I2S Decoder 硬體方塊圖 ... 61 圖5.2.4 5.1 聲道 I2S 介面 ... 62 圖5.2.5 1 階 Σ-Δ 調變器等效排程... 63 圖5.2.6 4 階 Σ-Δ 調變器等效排程... 63 圖5.2.7 1 階 Σ-Δ 調變器執行順序圖... 64 圖5.2.8 4 階 Σ-Δ 調變器控制圖... 64
圖5.2.9 三元轉四元方塊圖與 Finite State Machine ... 65
圖5.2.10 5.1 聲道 Σ-Δ 調變器之 FPGA 架構圖 ... 65 圖5.2.11 FPGA 實現之編譯結果 ... 66 圖5.3.1 TI TAS5121 接腳圖 ... 67 圖5.3.2 TOREX XP152A12C0MR/XP151A13A0MR 接腳圖 ... 67 圖5.3.3 (a)輸出功率與 PVDD 電壓(b)效率與輸出功率 ... 68 圖5.3.4 功率放大器啟動程序... 69 圖5.3.5 P/NMOS 絕對最大額定... 69 圖5.3.6 P/NMOS H-Bridge 功率放大級... 70 圖6.1 放大器平台訊號示意圖... 71 圖6.1.2 三元切換調變級邏輯輸出頻譜圖(零點 z = 1)... 72 圖6.1.3 三元切換調變級邏輯輸出頻譜圖(最佳化零點位置)... 72
圖6.1.4 四元切換調變級邏輯輸出頻譜圖(最佳化零點位置)... 73
圖6.1.5 TI TAS5121 (a)三元切換輸出時域圖 (b)四元切換輸出時域圖... 73
圖6.1.6 TI TAS5121 (a)三元切換輸出頻譜圖 (b)四元切換輸出頻譜圖... 74
圖6.1.7 TI TAS5121 三元與四元切換輸出頻譜比較圖 ... 74
圖6.1.8 TOREX P/NMOS H-Bridge (a)三元切換時域圖 (b)四元切換時域圖. 75 圖6.1.9 TOREX P/NMOS H-Bridge (a)三元切換頻譜圖 (b)四元切換頻譜圖. 75 圖6.1.10 TOREX P/NMOS H-Bridge 三元與四元切換輸出頻譜比較圖 ... 76
圖6.2.1 TI TAS5121 輸入電壓與電流圖(32 倍系統取樣) ... 77 圖6.2.2 TI TAS5121 輸出電壓與電流圖(32 倍系統取樣) ... 77 圖6.2.3 TI TAS5121 輸入電壓與電流圖(64 倍系統取樣) ... 78 圖6.2.4 TI TAS5121 輸出電壓與電流圖(64 倍系統取樣) ... 78 圖6.2.5 TOREX P/NMOS 輸入電壓與電流圖(32 倍系統取樣)... 79 圖6.2.6 TOREX P/NMOS 輸出電壓與電流圖(32 倍系統取樣)... 79 圖6.2.7 TOREX P/NMOS 輸入電壓與電流圖(64 倍系統取樣)... 80 圖6.2.8 TOREX P/NMOS 輸出電壓與電流圖(64 倍系統取樣)... 80 圖7.1.1 USB 介面 5.1 聲道音頻放大系統... 82
第一章
緒論
1.1 研究動機
自從Thomas Alva Edison 於 1876 年發明留聲機後,音響系統即隨著科技的進
步及發達而有驚人的進步。其中功率放大器在音響系統扮演一個相當重要地位,
傳統的方法是以 Bipolar 為元件作類比式線性功率放大。近代音響系統大都以數
位儲存媒體作為音源,必須透過數位類比轉換器(Digital to Analog Converter),將 數位訊號轉換為類比訊號,將類比訊號輸入類比功率放大器,驅動揚聲器,系統 如下圖1.1.1 所示。 圖1.1.1 類比音響系統 現今類比式功率放大器,常見以下[1]: 1. A 類放大器(Class A) 其工作電壓位於電晶體輸出特性曲線直流部分的中央位置,如圖1.1.2(i)。其 平均電流在有無訊號輸入時是相同的,全效率只有20~30%之間。 2. B 類放大器(Class B) 電晶體工作電壓位於截止區域附近,如圖 1.1.2(ii)。需採用推挽式(Push-pull) 結構,效率實際約65%,但有交叉失真(Cross-over distortion)。 3. AB 類放大器(Class AB)
如圖 1.1.2(iii),為 A 類與 B 類的折衷設計,兼顧效率用電包含散熱、體積) 要求及音質要求的妥協性設計,效率約40~60%。 4. C 類放大器(Class C) 工作偏壓位於截止偏壓以外,如圖 1.1.2(iv)。放大器導通時間少於輸入波形 全週期的一半,不適合用在聲頻的放大,適用在射頻信號放大,效率達 65%~85%。 VBE Ic 輸出波形 輸入波形 "無信號" 電流準位 VBE Ic 輸出波形 輸入波形 "無信號" 電流接近零 VBE Ic 輸出波形 輸入波形 VBE Ic 輸出波形 輸入波形 "無信號" 電流準位 Class A Class B Class AB Class C "無信號" 電流準位 ( i ) ( ii ) ( iii ) ( iv ) 圖1.1.2 類比功率放大器工作偏壓 這些類比放大器效率有限,因此散熱元件體積是一個問題。而近年來可攜式 及小型化消費性產品盛行,如MP3、可攜式 DVD 和平面顯示器等,可攜式設備 的電池使用壽命、散熱器尺寸、PCB 面積以及系統成本的考量下,D 類音頻功率 放大器的應用開始普遍。由於 D 類放大器的功耗較低,因此能夠實現較高的效 率。所以,許多大型平面顯示器和消費性音訊產品都更願意採用此類放大器。 D 類放大器最早是在 1959 年由 Baxandall 所提出[2],純以大訊號開關模式運 作[3],不需要任何工作偏壓,效率一般可達 90%以上[4]。如圖 1.1.3 為 D 類放大
器示意圖,其中MOSFET 以開關來表示,其之所以效率高乃是因為 MOSFET 在
狀態為’ON’時,RDS(on)為極小,因此它上面幾乎沒有壓降;在狀態’OFF’時,RDS(on)
值很大,因此幾乎沒有電流流過。所以從電源向負載提供了幾乎等量的功率。對 於理想開關,由於沒有切換損失,可達100%之功率效益,以目前之 Power MOS 技術,已經可將功率效益提升至95%[5]。因此在輸出相同的功率下,D 類放大器 較節省能源,另外體積小以及效率高,並且還可大幅減少散熱片所佔面積甚至取 消散熱片。 Vcc Vcc RLOAD RDS(on) RDS(on) RDS(off) RDS(off) Vswitch Vswitch Vcc RDS(on) RDS(off) Vswitch RLOAD Vcc/2 (i) Half-Bridge ILOAD ILOAD (ii) Full-Bridge 圖1.1.3 D 類放大器 D 類放大器再加上前級調變,便可將音響放大器全數位化,免除 D/A 轉換失 真,使得從音源數位取樣後到播放間的所有過程全部數位化。下圖 1.1.4 為全數 位化音頻放大系統。 圖1.1.4 全數位化音頻擴大器系統
切換式放大器的損失包含有:導通損失、切換損失以及周邊電路損耗,近年
來許多降低切換頻率以及功率損耗的技術也就孕育而生。而無須濾波器的D 類放
大器解決了這項問題,其可以充分的利用揚聲器的自身電感及低頻響應特性,無
須在訊號調變送入D 類放大器後再加濾波器,但是基於 PWM 的 D 類放大器,因
為它的總諧波失真(Total Harmonics Distortion)較高,所以只能提供有限的頻寬,
無法支援多音調振鈴及MP3 播放。爲了解決此頻率響應的問題,採用 Σ-Δ 的調 變方法並且無需要濾波器的D 類放大器因此產生,它不但可以提供較廣的頻寬同 時也可以降低切換頻率,甚至不需要後級的濾波器。 數位Σ-Δ 調變通常可以依二個重要特徵–階數、取樣頻率,作為比較、評估 的基準。隨著超大型積體電路製程不斷的改良,電路的操作速度不斷的提昇且供 應電壓逐漸地下降,可將Σ-Δ 調變應用在較高頻寬的系統。
1.2 研究內容與目標
本論文的重心在於D 類放大器的前級調變理論 Sigma-Delta (Σ-Δ) 調變。以 具時間最佳化(Time-optimal) Noise-Shaping 量化機制理論[6]為始,分析其高階系 統滑動模式(Sliding mode)的存在性與穩定性,在無限大的取樣頻率下,其量化誤 差如何藉由回授機制、迴圈轉移函數來改變其能量分佈,藉以衍生出有限取樣頻 率之高階系統Σ-Δ 調變理論,並證明與分析其穩定性[7]。另外在本Σ-Δ 系統架構中,雜訊轉移函數(Noise Transfer Funciton)通常以巴
特沃斯(Butterworth)高通濾波器為設計,其零點位置固定在 z = 1(直流)。本論文
將以降低量化雜訊在頻寬內的能量需求,對 NTF 分子部分函數定義出所需最佳
化的成本函數(Cost Funcation),以線性代數方法求出在頻寬內 n 階系統零點的位 置,藉由改變零點位置,來得到更佳的訊號雜訊比。
本文目標就是將所設計的調變系統實現於 FPGA,並且搭配一個 5.1 聲道的 USB 音頻控制器與全橋式 D 類數位功率放大器(Full Bridge Class-D Amplifier),來
完成一 5.1 聲道 D 類音頻放大器。USB 控制器將 PC 端的數位媒體音源以 PCM
16-bit 讀出,經由 FPGA 內的 Σ-Δ 調變器調變成 1.5-bit 的切換訊號,透過全橋
式D 類數位功率放大器放大,驅動揚聲器。
1.3 論文貢獻
本論文承繼[8][9]之基礎,針對雜訊轉移函數(Noise Transfer Function)的零點 位置證明推導出頻寬內最佳化位置,得到較佳的訊號雜訊比(Signal-to-Noise Ratio)。另外在實現上,將 USB 介面更換為 I2S 標準介面,大大增加了平台介面 的彈性,同時可以同步於系統取樣頻率,省去了緩衝器(buffer)的需要,大幅降低
了FPGA 的使用面積,使 FPGA 得以同時實現六個聲道的調變器。另外提出 1.5-bit
三元轉四元切換機制以補償全橋 P/NMOS 不匹配問題。透過 USB 控制器本身的
取樣頻率轉換器(Sample Rate Converter),將音樂一律轉換為 48kHz 的取樣頻率, 來使調變系統取樣頻率得以固定。在後級全橋功率放大器部分,也根據了六個聲 道個別功率需求,搭配不同的脈波(pulse)壓降。圖 1.3.1 為實作平台組成結構。 圖1.3.1 實作的組成結構;其中虛線部份為實做完成的部分 PC I2S Decoder & SDM & Ternary to Quaternary Converter (FPGA) H-Bridge Class-D Power Stage Six Channel USB Controller
16-bit digital six channel signal
through USB in real-time Modulated control signal
I2S format audio data
RF LS CTR LFE LF RS
1.4 章節概要
本論文的章節組織如下:
第二章將說明將multi-bit 數位訊號調變成 1bit 切換訊號的 PWM、MSOC 與
SDM 的調變原理,並分析個別理論的優劣之處;第三章為本論文理論核心,以 具時間最佳化(Time-optimal) Noise-Shaping 量化機制為推導基礎,分析系統在無 限大的取樣頻率下滑動模式(Sliding mode)的存在性與穩定性,藉以延伸到有限取
樣頻率高階數位Σ-Δ 調變器最佳模式下的存在性與穩定性,並且說明 n 階 Σ-Δ
調變系統的設計方法與雜訊轉移函數(Noise Transfer Function)最佳化的零點位
置;第四章為說明1.5 bit 機制,並用三元轉四元切換機制補償 P/NMOS 不匹配對
於1.5-bit 量化的影響,另外探討 Σ-Δ 調變器階數、Noise Shaping 截止頻率(Cutoff
frequency)、輸出振幅與訊號效能(Performance)量測之間的關係,來決定系統的最
佳實現;第五章說明如何實現全數位化的音響系統,並詳細說明I2S 機制、三元
轉四元轉換器;第六章提出該數位化音訊平台之效能評估與比較;最後第七章為 結論及對本系統的未來展望。
第二章 D 類放大器前級調變理論
採用D 類放大器的另外一個重點為切換式訊號的產生方法,一個好的切換訊
號才能極盡展現D 類放大器高功率效益的優點[3]。目前可見的架構為構造簡單的
Pulse-Width-Modulation(PWM) , Multi-Step Optimal Converter (MSOC) , 以 及 Sigma-Delta Modulation(Σ-Δ)。
2.1 Pulse-Width Modulation (PWM)
PWM 如其名,是將輸入訊號的大小訊息,經過三角波比較後,即轉換為雙 位準(±1)的時間寬度,當輸入訊號較大,則高準位的時間較長,反之亦然。 PWM 切換控制方塊如圖 2.1.1,其中三角波可以為正、上升、下降三角波等 三種。 圖2.1.1 Pulse-Width Modulator 示意圖 切換式控制信號 Vswitch是由輸入訊號 Vinput與頻率為 fs的三角載波 Vt 比較而 得,當輸入訊號Vinput的電壓大於三角波Vt 時,則輸出為高凖位;反之則為低準 位,而開關的切換頻率為 fs。固定切換頻率,調整脈波寬度,以改變輸出電壓的 大小。PWM 輸出電壓的平均值之大小,正比於開關之導通截止時間[10]。 Vswitch Vinput Vt數位PWM,其輸入訊號為取樣後的訊號,即所謂的 Uniform PWM(UPWM)
架構,而當取樣頻率無限大時,則為理想的NPWM(Natural PWM),圖 2.1.2 為運
作比較,系統於NPWM 情況下,不會產生諧波失真[11][12],而對於有取樣動作
之UPWM 卻會產生倍頻雜訊(Harmonic Distortion) [10]。
圖2.1.2 NPWM 與 UPWM 運作圖[10]
圖2.1.3 PWM 輸出頻譜響應圖(三角波頻率= 48kHz × 8,解析度= 25)
率(Oversampling Ratio)為 8 倍,三角波解析為25(內頻假設為 12.288MHz)的數位
PWM 輸出頻譜,發現其諧波失真問題相當嚴重,若欲藉著取樣頻率之提高降低 諧波成分,將使系統之時脈需求提高。
圖2.1.4 NPWM 與 UPWM 運作圖[12]
上圖2.1.4,為[12]提出一解決方法為 Direct Interpolation Sampling,即以線性
內插方式,補償 UPWM 輸入訊號之不足,由於線性內插可以採相似三角形運算 得到方波寬度,以達到調變訊號最接近NPWM 的狀態。 除了取樣頻率之外,其問題在於數位實現時,為了增加 duty cycle 精度所需 的時脈將高達Giga Hz[11],於高切換頻率情況時,會有 EMI 的問題[14],同時在 每一個三角波週期內必定有一次切換,造成功率級之切換損失無法減低。數位 PWM 三角波的切換頻率為 fs,而為了達到n-bit 的解析度(resolution),內部時脈 必須為2n s f 。假設輸入為取樣頻率48kHz 的訊號,而三角波作 32 倍的過度取樣, 所以fs =48K×32Hz,若要達到 16-bit 的解析度,則內頻為48 32 2 16 K× × 約等於 100GHz,在實現上不切實際。因此,[12][13]之作者提出,先將輸入訊號作前級 Noise Shaping 的處理降低位元數,再輸入 PWM 作調變波的產生,可大幅減低高
時脈的需求,同時前級的雜訊重新分佈處理,可將因為降低位元數所產生的量化 雜訊,移至頻帶外,因此仍然保有訊號之精度。
PWM 之應用近年來於音訊的處理如 TI 的 5000 系列,其中 TAS5086[14]更為
六聲道PWM 處理器。
2.2 Multi-Step Optimal Converter (MSOC)
MSOC 源自於有限制條件的最佳化控制(Constrained Optimal Control)理論 [16],於 2002 年由 Daniel E. Quevedo 等人提出。此設計方法相當彈性,可以依據 不同的需求而訂定出個別的成本函數(Cost Function),量化誤差為常見的需求。
2.2.1 區間二次倒回(Receding Horizon Quadratic)最佳化控制
理論簡述如下。考慮一個系統其輸入為u k
( )
,以及它的狀態向量為x(k)∈Rn,在此假設n=1,可得到下列的狀態方程式:
x k
(
+ =1)
Ax k( )
+Bu k( )
, u k( )
∈U (2.1)其中 U 表示一個某種限制下的輸入集合。
而Finite Horizon Quadratic Cost Function with Prediction Horizon N 如下:
( ) ( )
(
)
(
) (
)
{
( ) ( )
( ) ( )
}
N V , T 1 1 T T x k u k =x k+ Px k+ + x k Qx k +u k Ru k (2.2) 其中 Q≥0,P>0 and R>0 將(2.1)式帶入(2.2)式可得:( ) ( )
(
)
(
( )
)
( ) ( )
( ) ( )
N V , V T 2 T N x k u k = x k +u k Wu k + u k Fx k (2.3) 其中 W= B PBT + ,R F=B PAT , VNb g
x k( ) 為與u k( )
無關的常數項。 令%( )
1/ 2( )
u k =W u k 代入(2.3)可簡化為( ) ( )
(
)
(
( )
)
%( )
%( )
%( )
1/ 2( )
N V x k ,u k =VN x k +uT k u k +2uT k W− Fx k (2.4) 將(2.4)對u k( )
微分,可求得最佳解: %(
( )
)
1/ 2( )
u x k = −W− Fx k 再將此最佳解經過量化,即可得到開關的切換訊號,如下所示 u x k W qUN W Fx k * / ~ / ( ( ))= −1 2 (− −1 2 ( )) (2.5)2.2.2 MSOC 系統架構
系統目的在於減少訊號頻帶內的量化誤差(Quantization Error),所以判別誤差 前應該將轉換誤差通過訊號頻帶的濾波器,設此濾波器為 H:[17] H z( )= +D C zI( −A)−1B (2.6) 其 中 A∈Rn n× ,B∈Rn×1,C∈R1×n,D∈R1 1× 。 另 外 必 須 設 計 一 個 理 想 的 量 化 器 (quantizer),使輸入與量化輸出經過濾波器的誤差(filtered error)最小化,概念就是 e t( )=H z a t( )( ( )−u t( )) Δ ,其中a t( )
為原輸入訊號,u t( )
為量化後的訊號,而此狀態 空間系統的表示式如下所示:(
)
( )
(
( ) ( )
)
( )
( )
(
( ) ( )
)
1 , x t Ax t B a t u t e t Cx t D a t u t + = + − = + − (2.7) n R k x( )∈ 為濾波器的狀態,n∈R也就是濾波器H的階數(order)。而以二次成本函數(Quadratic Cost Function)為設計準則,在有限的區間N內;在時間t=k時,將
下列之二次成本函數最小化則可求得解:
( )
( )
1( )
( )
2, k N N t k V u k e t + − = =∑
r (2.8) 其中( )
( ) (
1)
(
1)
T UN u kr =⎡⎣u k u k+ L u k+ −N ⎤⎦ ∈而利用e kr( )= e k( ) e k( +1) L e k( +N−1) T =ψa kr( )−ψu kr( )+Γx k( ),再根據式 (2.3)、(2.4)及(2.5)概念,得到方程式(2.8)之最佳解為: u kr v V u k q a kr x k u k UN N UN * ( ) ~ ( ) arg min= * ( ( ))= ( ( )+ ( )) ∈ − ψ 1 ψ Γ (2.9) 其中 r M M L O M M O O L K a k a k a k a k N C CA CA h h h h CA B i N N N i i ( ) ( ) ( ) ( ) , , , , , , = + + +
L
N
MM
MM
O
Q
PP
PP
=L
N
MM
MM
O
Q
PP
PP
=L
N
MM
MM
O
Q
PP
PP
= = − − − − 1 1 1 0 0 1 0 1 1 2 1 1 1 1 1 1 Γ ψ , qU~N( )⋅ :Nearest Neighbor Vector Quantizer[21]。
{
1, ,...,2}
, N r U = v v v 其中r=( )
nU N,被映射(mapping)到另一個集合上: ~ {~ , ~ , , ~ } UN = v v vr ⊂RN Δ 1 2 K ,其中 , . N i i i v% = Ψv v ∈U 為了提高性能,t=k時,ur*( )
k 只有第一個元素(element)將被使用來回授更新 狀 態x k( )
以 及 輸 出 , 在 下 一 個 取 樣 時 間 點 , 新 的 狀 態 將 被 使 用 來 最 小 化 ( )(
1)
N V u kr + ,得到u k(
+1)
。再以a k( )
表示a kr( )
,最後系統輸出可以簡化為: u k( )= qU~N( ( ) ( )H z a k −F z u k( ) ( )) − 1 0 0 1 L Ψ (2.10) 其中H z( )=Ψ[1 z L zN−1]T+Γ(zI− A)−1B, F z( )=Γ(zI− A)−1B 圖2.2.1表示了(2.10)式的架構[17],是以回授的方式表示,其中粗線表示是向 量的訊號路徑。圖2.2.2為取樣32倍的情況下,輸入取樣頻率48kHz的1kHz正弦波, 其切換訊號u的頻率響應分佈。在此H z( )為純二階積分器,N=2,量化器(quantizer) 為1-bit。從頻域圖上可以看到20kHz以內有雜訊分布。q U~N( )⋅ H 1 0 0 1 L Ψ− F
+
_
a(k) u(k)圖2.2.1 MSOC with Feedback Loop
圖2.2.2 MSOC 輸出頻譜響應圖(2-order, N=2) qU~N( )⋅ 是一個N 維的向量量化器,當 horizon N 增加,所得到的效能比較好, 但複雜度隨著增加。MSOC 在 N=1 時等於是 Σ-Δ 調變器,所以 Σ-Δ 調變器 是MSOC 的一個特例。此方法在高階的穩定性上仍有待證明,因為此最佳化方法 的回授為非線性,無法依據線性系統中的穩定性原則來判定,當系統高於二階 時,極容易發生不穩定情況;因此對於音頻訊號之應用,只能將雜訊推至某一定 程度之高頻地帶,效果有限。
2.3 Sigma-Delta Modulation (SDM)
2.3.1 SDM 之發展由來
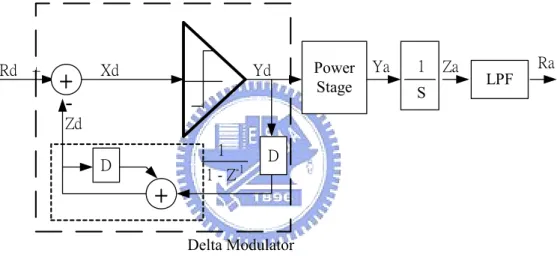
Sigma-Delta(Σ-Δ) Modulator 是由 Delta(Δ) Modulator 演進而來的,最早是在 1952 年由 Frank de Jager 提出[18] ,應用在通訊領域。圖 2.3.1 為一個 Delta Modulator DAC 方塊示意圖,虛線部分為 Δ 調變器架構。假設 Rd 代表一個 16-bit
的數位音訊,Yd 為△調變之 1Bit 雙準位輸出(±1)。
+
D+
D + -Rd Xd Yd Ya Za Zd Ra Power Stage S 1 LPF 1 - Z-1 1 Delta Modulator圖2.3.1 Delta Modulator DAC 方塊示意圖
△調變之目的就是要使Yd 之積分波形愈接近 Rd 愈好,如此一來,當 Yd 經 由D 類放大器轉換為類比訊號時,透過類比積分器與低通濾波器處理後便可以將 Rd 轉換為類比放大訊號 Rs。參照圖 2.3.2,△調變操作機制就是想辦法讓 Zd(Yd 之積分值)盡量追蹤 Rd 的訊號,當 Zd 超過 Rd,下一個 Yd 值就設為負 1,反之 下一個Yd 值就設為正 1,,不斷地修正來使得 Zd 跟隨 Xd 曲線。因此 Yd 轉換 為類比後,經過類比積分器的Za 和 Zd 之波形是一樣的,只不過 Zd 是數位而 Za 是類比。最後再透過一個類比低通濾波器以產生平滑的 Xa,Xa 就是 Xd 的類比 重現。
圖2.3.2 Delta Modulator 操作機制 △調變會演變為Σ-Δ 調變,主要是有三個缺點:(i)若 Rd 輸入變化太劇烈, 將使的 Zd 跟不上 Rd 造成嚴重失真;(ii)Rd 輸入為直流或極低頻時,Yd 只會不 斷上下切換,無法得知電壓大小(圖 2.3.3);(iii)類比積分器有不穩定及佔用面積 的問題。 圖2.3.3 Delta Modulator 之問題 於是,1962 年 Inose 基於Δ調變器架構提出Σ-Δ調變器[19],將Δ調變器 之類比積分器移至輸入端,如圖2.3.4,如此不但可以使急劇變化的輸入透過積分 變為較平緩,對於直流之輸入,後面的△調變就可以看得到而加以量化編碼,類 比積分器也變為數位式;而若將其中的二個積分器與減法器做等效處理,可省下
一個數位積分器,即成為圖2.3.5(i)之基本一階Σ-Δ架構。 + D + D + -Rd Xd Yd Ya Ya Zd Us Power Stage S 1 LPF 1 - Z-1 1 Delta Modulator + D 圖2.3.4 Inose Δ調變器 (i) (ii) 圖2.3.5 (i)一階Σ-Δ調變器 (ii) 一階數位Σ-Δ調變器 圖2.3.6 n 階數位Σ-Δ調變器 在輸入端及回授端設計乘法係數,即成為一完整一階數位Σ-Δ調變器(圖 2.3.5(ii))。而將之串接之後,即可得到圖 2.3.6 之 n 階數位Σ-Δ系統,其中 an、 bn、…、a1、b1為其係數,可以控制回授路徑以及訊號路徑之各階權重。
2.3.2 SDM 之概念與效果
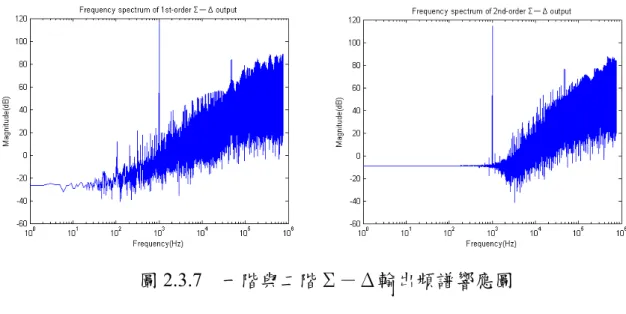
簡單說,Sigma-Delta(Σ-Δ) Modulation 原理一般就是利用過高的取樣頻率 補償訊號位元數之降低[7],將 multi-bit 的訊號轉成一連串 1-bit 的訊號,這串訊 號的頻譜在音頻範圍內(20kHz)要和輸入訊號一模一樣,而量化器(Quantizer)產生 的量化誤差則透過迴圈轉移函數盡量移往高頻的頻帶,如此一來這些雜訊便可以 利用類比低通濾波器或是揚聲器的低通效應還原音頻內的訊號。 那從Σ-Δ調變系統的設計角度來看,如圖2.3.6,當輸入訊號在通過最後的 量化器前,會經過一級、二級,甚至是多級的低通濾波器,這樣的目的是希望訊 號經由量化器量化後,低頻成分可以很精準,而方法就是盡量讓量化器只針對低 頻訊號作量化,而偏偏回授端會將量化後高頻成分帶入,因此濾波器便是扮演在 量化器前阻擋高頻成分的角色,而輸入訊號所通過的級數,則是代表Σ-Δ調變 器的階數。由此一來便可以容易地理解到,當所設計的Σ-Δ調變器的階數越 高,阻擋高頻的能力越強,量化器對於低頻訊號的量子化也越精準,量化誤差也 就越往高頻擠,來得到更好的訊號雜訊比(Signal-to-Noise Ratio)。 圖 2.3.7 是一階與二階的Σ-Δ調變器的 Matlab 模擬圖,其中輸入頻率為 1kHz 的單頻訊號,取樣頻率取 48kHz,取樣倍率為 32 倍(系統頻率為 1.536MHz)。 從Σ-Δ調變效果的角度來觀察,一階Σ-Δ調變輸出頻譜圖20kHz (音頻)以內 是我們所要的訊號,而20kHz 以上就是不要的雜訊,除了 1kHz 訊號產生的 peak 之外,所有的雜訊有被移至高頻的效果,而從一階與二階Σ-Δ輸出頻譜來看, 二階系統的量化雜訊比較往高頻擠,Noise-Shaping 的效果更加明顯,而在低頻的 部分更加精準。由此可以表示階數越高,效果越好。若可以將系統設計為更高階 數的架構,其雜訊分布情形將更不會影響我們所要的音樂訊號。但階數越高數位 濾波器成本越高。且會有穩定性分析上的問題,必須在階數與規格要求取得平衡。圖2.3.7 一階與二階Σ-Δ輸出頻譜響應圖
2.4 各方法分析與比較
表2.4.1 為三種調變法之統整,其中 PWM 雖然構造簡易無穩定性問題,但 是其數位化效果沒有另外兩個理想,且切換次數也無法降低;而MSOC 之方法提 供了一個適合小系統運作,且訊號響應有一定水準之要求的應用;而Σ-Δ系統 為一個可彈性設計為高階或低階之調變方法,雖然構造較複雜,需要乘法與加法 運算,但是如果設計得當,系統響應可以理想地將雜訊推至所期望的頻帶,不致 干擾輸入訊號。 表2.4.1 訊號調變法比較表 構造 Stability THD 時脈需求 SNR PWM 簡單 穩定 高 高 低 MSOC 較複雜 二階以 下穩定 中 低 高 Σ-Δ 複雜 高階穩 定 低 低 高第三章
SDM 調變原理與設計
數位Σ-Δ調變器工作概念包含:超取樣(Oversample)、Noise-Shaping。 1. 超取樣(Oversample) 從數位訊號的訊號雜訊比(Signal-to-Noise Ratio)的公式來看: SNR(dB) 6.02n 1.76 10log (f / 2f= + + 10 s MAX) (3.1) 其中n 為 bit 數,fs為訊號取樣頻率,fMAX為訊號頻寬。由式(3.1),超取樣倍率每4 倍將等效於解析度增加 1bit。而如果 1-bit 要達到 16-bit 解析,超取樣倍率
大小將不切實際,所以Σ-Δ採用 Noise-Shaping 技術消除了這種侷限,每 4 倍
將使SNR 增加高於 6dB。
2. Noise-Shaping
將1-bit 輸出回授與輸入訊號比對後產生的量化誤差(Quantization Error),透
過迴圈轉移函數來改變其能量分佈,推往高頻,此部分將由以下章節詳述之。
3.1 SDM 調變器的順滑模態與最佳模態理論
本章基於[6][7]來介紹Σ-Δ調變的設計概念與方法,將以連續訊號的具時間 最佳化(Time-Optimal)之 Noise-Shaping 量化機制為基礎,藉由各階量化器的演 進,討論其順滑模態(Sliding Mode)的存在性與穩定性,並由此衍生出 n 階數位Σ -Δ調變器系統架構,分析其數位運作下,最佳模態(Optimization Mode)的存在 性與穩定性。首先於3.1 闡述理想化 Noise-Shaping 機制概念,推導出 n 階數位Σ -Δ調變器架構與其穩定條件。3.2 說明輸出特性與實現上的狀態變數限制。3.3 為系統設計方法與流程。3.1.1 具時間最佳化之 Noise Shaping 量化機制
數位Σ-Δ調變器的機制就是將multi-bit 訊號調變成 1-bit,我們可從一個理
想 連 續 訊 號 的 1-bit Noise-Shaping 量 化 機 制 作 為 基 礎 。 如 圖 3.1.1 , 1-bit Noise-Shaping 量化器(Quantizer)機制就是將一個連續訊號 r(t)量化成 1-bit 二元 (Binary)y(t)輸出,而 1-bit 訊號 y(t)要如何逼近原始的輸入訊號 r(t),可從 Noise-Shaping 量化器內部機制來探討。 Noise-Shaping Quantizer r Noise-Shaping y Quantizer r y 圖3.1.1 1-bit Noise-Shaping 量化機制 1-bit 二元訊號不可能等於一個連續訊號,所以此問題可視為一個有限制條件 的最佳化(Constrained Optimization)問題。我們可以給予訊號轉移函數(Signal Tansfer Function) F(s) , 與 一 個 權 重 函 數 (Weighting Function) W(s) , 從 一 個 frequency-weighted norm 最小化來看:
min|| (
)||
| |y=1
W FR Y
−
(3.2)Y(s)與 R(s)為 y(t)與 r(t)的拉普拉司(Laplace)轉換。式中FR Y− 即為量化誤差,而
權重函數(Weighting Function) W(s)則定義頻域的權重,因此式(3.2)說明了FR Y−
量化誤差將經由 W(s)所選擇的頻帶做最小化。如圖 3.1.2,假設 r(t)為一個音頻 (20kHz)內的訊號,則 W(s)可以選擇為一個截止頻率(Cutoff Frequency)高於音頻的
低通濾波器,如此一來此最佳化將針對量化誤差低頻部分做最小化,使得 1-bit
W(s)就是扮演將FR Y− 量化誤差做整型(Shaping)的角色,將誤差推擠到不要的頻 帶,達到Noise-Shaping 效果。 圖3.1.2 Noise-Shaping 概念
3.1.2 1 階數位化量化器
根據式(3.2)的概念,可以從一理想連續訊號 1 階具時間最佳化(Time-Optimal) 量化器來看,其架構為圖3.1.3。在此規定所有係數皆為正數。 + x2 y x1 0 F W + Q x2 + - 1 y -Q x2 + - x y -+ -a b 1 1 b s c 1 1 + 1 s sign(.) a1 b1 c1 y=sign x( )1 X1 =W FX( 2−Y) 圖3.1.3 1 階 Time-Optimal 量化器 其中X1 =W FX( 2−Y),系統的目標就是將x1最小化,因此令x1的成本函數(Cost Function)為V = 1x 2 1 2 ,希望其大小隨時間而漸小,其微分為V&: & & ( ) | |[ ( ) | |] V = x x1 1= x a x1 1 2−b y1 −c x1 1 = − x1 −a sign x x1 1 2+ +b1 c x1 1 (3.3)根據descent property,V& =x x1 1& <0 when x1 ≠0,將使x1收斂,也就是當x1>0
於等於0,當 V=0 時表示量化誤差x1為0,所以使非 0 的 V 符合 descent property 的充分條件為: | |x b | | a c a x 2 1 1 1 1 1 < + (3.4)
此為順滑模態的存在性(Existence of Sliding Mode),x1=0為順滑表面(Sliding
Surface)。 + x2 y F W + Q x2 1 + -Q x2 x y + -+ -a b 1 1 b z c 1 1 1 ( − +) 1 1 z− sign(.) a1 b1 c1 y k( )=sign x k[ ( )]1 X1 =W FX( 2−Y) | ( )|x k1 <λ 圖3.1.4 1 階數位Σ-Δ調變器 而將1 階量化器數位化來看,如圖 3.1.4,為了能在 n 階系統使用 pipeline, 因此將積分器加入一個 delay 來分析系統效果。但對於離散系統來說,便無法以 V 的差分來證明 descent property。但以減小量化誤差x1為出發點,可以用相似於 x x1 1 0 • < 的概念x x1Δ <1 0來證明x1會收斂於某個範圍內。由圖3.1.4 可得方程式: x k1( + =1) x k1( )+a x k1 2( )−b y k1 ( )−c x k1 1( ) (3.5) y k( )=sign x k[ ( )]1 (3.6) 因此可得x1的差分: Δx k1( )=x k1( + −1) x k1( )=a x k1 2( )−b sign x k1 [ ( )]1 −c x k1 1( ) (3.7) 推導出x k1( )Δx k1( ): x k x k x k a x k b sign x k c x k x k a sign x k x k b c x k 1 1 1 1 2 1 1 1 1 1 1 1 2 1 1 1 0 ( ) ( ) ( ){ ( ) [ ( )] ( )} | ( )|{ [ ( )] ( ) | ( )|} Δ = − − = − − + + <
∴ | ( )|x k < b + | ( )| a c a x k 2 1 1 1 1 1 (3.8)
此稱為最佳模態的存在性(Existence of Optimization Mode)。
在(3.8)的條件下,可以確保x1的差分在某一範圍內: Δx k a x k b sign x k c x k a x k b c x k b c x k 1 1 2 1 1 1 1 1 2 1 1 1 1 1 1 2 2 ( ) ( ) [ ( )] ( ) | ( )| | ( )| | ( )| = − − ≤ + + < + (3.9) 同時,由於條件(3.8)可以使x1(k)Δx1(k)<0 (for x1(k)≠0) ,也就是當x1(k)>0 時, x1(k+1)<x1(k);當x1(k)<0時,則x1(k+1)>x1(k),因此可以得知x1(k)會以0 為準位振盪,加上差分Δx k1( )被限制(3.9),可以推知x1(k)最終被限制於Δx1 的最 大變動範圍內: | ( )|x k1 = Δx k1( ) <2b1+2c x k1| ( )|1 (3.10) 在0≤ <c1 0 5. 的前提下,x1(k)的邊界(3.10)可寫為: | ( )|x k b c 1 1 1 2 1 2 < − (3.11)
3.1.3 n 階數位化量化器與系統化簡
如圖 3.1.5,以一階量化器為基礎串接起來,即形成一個 n 階具時間最佳化 (Time-Optimal)量化器。 + Q + -Q y + -1 s sign(.) a1 b1 c1 + + -r + -1 s an bn cn L L L xn x2 x1 圖3.1.5 n 階 Time-Optimal 量化器而由於分析與設計上方便,以下將此n 階架構作一個等效上的簡化,根據圖 3.1.5 之 n 階系統,可以寫下其狀態方程式以及 Laplace 轉換方程式: & ( ) & ( ) & ( ) x a x b y c x X s c a X b Y x a x b y c x X s a X b Y c X x a r b y c x X s a R b Y c X n n n n n n n n 1 1 2 1 1 1 1 1 1 2 1 2 2 3 2 2 1 2 2 3 1 2 1 1 1 1 1 1 = − − ⇒ = + − = − − ⇒ = − − = − − ⇒ = − −
R
S
||
|
T
||
|
(3.12) (3.13) (3.14) M 將(3.12)、(3.13)、(3.14)疊代,可以得到: X s1( )=W s F s R s( )[ ( ) ( )−Y s( )] (3.15) 其中 F s a N s a a a a W s N s D s N s b s a b s a a a b D s s c s a c s a a a c n n n n n n n n n n n n n n n ( ) = , = ( ) = ( ) ( ) ) ( ) ( ) ( ) ( ) ( 1 2 1 1 1 2 2 1 2 1 1 1 1 2 2 1 2 1 L L L L L = + + + = + + + +R
S
||
|
T
||
|
− − − − − −F(s)為訊號轉移函數(Signal Transfer Function),W(s)為迴圈濾波器(Loop Filter),而
根據(3.15)化簡式可以將系統簡化為圖 3.1.6。
a a
a
N s
n n 1 2L
( )
N s
D s
n n( )
( )
F
W
Qsign(.)
r
+
x
1y
−
圖3.1.6 n 階 Time-Optimal 量化器等效方塊 參照連續訊號的方法,可推導出n 階數位Σ-Δ調變器與其系統等效方塊 圖,如圖3.1.7。式(3.15)可以改寫為: X z1( )=W z F z R z( )[ ( ) ( )−Y z( )] (3.16)a a a N z n n 1 2L ( ) N z D z n n ( ) ( ) F W Q sign(.) r + x1 y − + Q + -Q y + -- sign(.) a1 b1 c1 + + -r + -1 1 z− an bn cn L L L xn x2 1 x1 1 z− ( )a ( )b 圖3.1.7 (a) n 階數位Σ-Δ調變器 (b) n 階數位Σ-Δ調變器等效方塊圖 其中 F z a N z a a a a W z N z D z N z b z a b z a a a b D z z c z a c z a a a c n n n n n n n n n n n n n n n ( ) = , = ( ) = ( ) ( ) ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 1 2 1 1 1 2 2 1 2 1 1 1 1 2 2 1 2 1 1 1 1 1 1 L L L L L = − + − + + = − + − + − + +
R
S
||
|
T
||
|
− − − − − − (3.17)3.1.4 SDM 之穩定條件
因為x1=0是動滑表面(Sliding Surface),代入式(3.12)可以求得 y:
y a b x = 1 1 2 (3.18) 將上式代入(3.13)~(3.14)可以得到各狀態關係式: & ( / ) & ( / ) & ( / ) & & & & / / / / x a x a b b x x a x a b b x x a r a b b x x x x x a b b a a b b a a b b a a b b x x x n n n n n n 2 2 3 1 2 1 2 3 3 4 1 3 1 2 1 1 2 2 3 4 1 2 1 2 1 3 1 3 1 4 1 1 1 1 2 3 4 0 0 0 0 0 0 0 0 0 = − = − = −
R
S
||
T
||
⇒L
N
MM
MM
MM
O
Q
PP
PP
PP
= − − − −L
N
MM
MM
MM
O
Q
PP
PP
PP
− M M L O M O O M M O L M M x a r n nL
N
MM
MM
MM
O
Q
PP
PP
PP
+L
N
MM
MM
O
Q
PP
PP
0 0其中 A a b b a a b b a a b b a a b b B a n n n = − − − −
L
N
MM
MM
MM
O
Q
PP
PP
PP
=L
N
MM
MM
O
Q
PP
PP
− 1 2 1 2 1 3 1 3 1 4 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 / / / / , L O M O O M M O L M 由矩陣 A 可以得知系統的特徵方程式: s b a b s b a a b s b a a a b N s b n−1+ 2 1 n− + n− + + n n− = n 1 2 3 2 1 1 3 1 2 1 1 1 L L ( ) (3.19) 因為輸入 r 為有限值,因此只要確保(3.19)的根落在左半平面,則可以使系統 狀態皆為有限值。此外也觀察到,式(3.19)等效於系統迴圈濾波器 W 之分子 N(s), 因此設計上要使 N(s)的根必須落在左半平面,即可以確保系統狀態x2 ~ xn皆為穩定,此稱為順滑模態的穩定性(Stability of Sliding Mode)。因此一個理想 n 階具時 間最佳化量化器的穩定條件為:
(i) 動滑模態的存在性(Existence of Sliding Mode):| |x b | |
a c a x 2 1 1 1 1 1 < +
(ii) 動滑模態的穩定性(Stability of Sliding Mode):Nn(s)所有根必須落在左半平面
而發展成n 階數位Σ-Δ調變器時,量化誤差由式(3.11)將收斂於一個範圍內 而不為0。首先由 1 階狀態方程式(3.5)可以得到y k( )與x k1( )、x k2( )之關係: y k a b x k b x k c b x k ( ) ( ) ( ) ( )= 1 − ( ) ( ) ( )− 1 2 1 1 1 1 1 1 Δ (3.20) 而利用上式,可以將其餘狀態變數表示為: x k a b b x k a x k b b x k c b b c x k x k a b b x k x k a x k b b x k c b b c x k x k a b b x k x k a r k b b x k c b b n n n n n n 2 1 2 1 2 2 3 2 1 1 1 2 1 2 1 3 1 3 1 2 3 3 4 3 1 1 1 3 1 3 1 1 1 2 1 1 1 1 1 1 1 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( + = − + + + − + = − + + + + − + = − + + + + Δ Δ Δ M −
R
S
||
|
T
||
|
c x kn) ( )1由上面關係式,可以寫成系統方程式: v v x(k+ =1) Ax( )k +B r k1 ( )+B2Δx k1( )+B x k3 1( ) 其中A a b b a a b b a a b b a a b b B a B b b b b b b B c b b c c b b c c b b c n n n n n n = − + − − −
L
N
MM
MM
MM
O
Q
PP
PP
PP
=L
N
MM
MM
O
Q
PP
PP
=L
N
MM
MM
O
Q
PP
PP
= − − −L
N
MM
MM
O
Q
P
− 1 2 1 2 1 3 1 3 1 4 1 1 1 1 1 2 2 1 3 1 1 3 1 2 1 2 1 3 1 3 1 1 1 0 0 1 0 0 1 0 0 1 0 0 / / / / , , / / / , / / / L O M O O M M O L M M MPP
P
由矩陣 A 可以得知系統的特徵方程式: (z ) b a ( ) ( ) ( ) b z b a a b z b a a a b N z b n n n n n n −1 −1+ 2 1 −1 − + −1 − + + − = 1 2 3 2 1 1 3 1 2 1 1 1 L L (3.21) 由式(3.10)與(3.11)得知Δx k1( )、x k1( )與輸入r k( )皆為有限值,因此只要確保 (3.21)(等效於系統迴圈濾波器 W 之分子 N(z))的根落在單位圓內,則可以確保系 統 狀 態x2 ~ xn 皆為穩定,此稱為最佳模態的穩定性(Stability of Optimization Mode)。因此一個 n 階數位Σ-Δ調變器的穩定條件為:(i) 最佳模態的存在性(Existence of Optimization Mode):| ( )|x k b | ( )|
a c a x k 2 1 1 1 1 1 < +
(ii) 最佳模態的穩定性(Stability of Optimization Mode):Nn(z)所有根必須落在單位
圓內
3.2 數位Σ-Δ調變器 Noise-Shaping 與狀態變數限制
3.2.1 說明由輸出觀點看系統之 Noise-Shaping 效果,3.2.2 則為各階狀態變數 的表示。3.2.1 從輸出觀點來看 n 階 Noise Shaping 效果
由式(3.16)推導,可得輸出之等式:Y=FR W X− −1 1 (3.22) 因此可以發現在理想狀態下,X1=0,則輸出Y =FR;但是於離散系統中,只 能保證X1收斂於某一範圍[7],因此 W 頻帶內的量化誤差只能被降低而不是排 除。因此輸出必包含兩部分,第一項為我們所要的訊號 FR,而另外一項為量化 誤差X1所造成的雜訊,所幸的是量化誤差會先經過W−1濾波;當 FR 分布為低頻 帶時,我們可以選擇 −1 W 為高通濾波器,使量化誤差於低頻的成分不會出現於 Y 中,便可以讓Y 的兩個訊號成分不會互相干擾。 圖3.2.1 −1 W 之頻率響應 (a)零點皆在 z = 1 (b)零點在最佳位置 圖3.2.1 為本論文所採用之 −1 W 頻譜圖,因此量化誤差通過W−1後其頻率分布 會被改變,原本分布於低頻的成分則被推至高頻處,因此Σ-Δ之另一項特性為 具有雜訊重整(Noise-Shaping)的能力,在後面的設計方法中,將說明如何使雜訊 分布於任意所想要的頻帶,並分析證明最佳化 −1 W 之零點位置。
3.2.2 系統各階狀態表示式與穩態
3.1 節的穩定條件中只能確保系統各階狀態維持在有限值,但其設計係數組 合有多種可能,為求離散系統中各狀態的數位表示法可以統一,因此必須根據各 狀態與係數之間的關係,妥善設計一組係數來使各狀態在相同的邊界(Boundary)以便實現。 各狀態z-tansform 的表示式: zX X a X bY c X zX X a X b Y c X zXn Xn a R b Y c Xn n n 1 1 1 2 1 1 1 2 2 2 3 2 2 1 1 = + − − = + − − = + − −
R
S
||
T
||
M (3.23) 將式(3.17)、(3.22)Y =FR W X− −1 1代入(3.23)可以求得各狀態Xm( )z 與R z( )、X z1( )的 關係式: X z b a F z R z z c b W z a X z N z a F z R z D z N z W z a X z 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) = + − + − = + − − −b g
c
h
X z b z b a a a F z R z z c z c a b z b a W z a a X z N z a a F z R z D z N z W z a a X z 3 1 2 1 1 2 2 1 2 1 1 2 1 1 1 2 1 2 1 2 2 2 1 1 2 1 1 1 1 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) = − + + − + − + − − + = + − − −b g
b g b g
b g
M
X z N z a a a F z R z D z N z W z a a a X z n n n n n n ( )= − ( ) ( ) ( )+ ( )− ( ) ( ) ( ) − − − − − 1 1 2 1 1 1 1 1 2 1 1 L L 所以可以推導出Xm( )z 與R z( )、X z1( )的通式: X z a a a A z a a a R z B z a a a X z m n m n m m m m ( )= ⋅ ( ) ( )+ ( ) ( ) , − − 1 2 1 2 1 1 2 1 1 2 3 L L L , = , ,L (3.24) 其中 A z N z N z B z D z N z W z W z N z D z N z b z b a z b a a D z z c z c a a m m n m m m n n k k k k k k k k k k ( ) ( ) / ( ) ( ) ( ) ( ) ( ) , ( ) ( ) / ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) = = − = = − + − + + = − + − + +R
S
||
T
||
− − − − − − − − − 1 1 1 1 1 1 2 1 2 1 1 1 1 1 1 1 1 1 1 L L L L (3.25)最後,由(3.24)可估測xm( )k 在穩態時的最大值為: x a a a A a a a r B a a a x m ss n m m ss m m ss ∞ ∞ − ∞ ∞ − ∞ ≈ 1 2 + 1 2 1 1 2 1 1 L L L (3.26) 其中 .∞表示 1 , sup ( ) z H norm∞ A∞ A z = = , .ss∞表示穩態之最大振幅。
3.3 設計方法
W
r
+
x
1y
−
+
e
F
圖3.3.1 Additive Noise Model
3.3.1 迴路濾波器(Loop Filter)設計
將圖 3.1.7 的等效方塊圖的 1-bit 量化器線性化為 additive noise model 如圖
3.3.1 , 如 此 一 來 量 化 誤 差 e 的 轉 移 函 數 即 為 雜 訊 轉 移 函 數 (Noise Transfer Function): NTF W z N z D z D z D z N z n n n n n = + = + = + 1 1 1 1 ( ) ( ) / ( ) ( ) ( ) ( ) 如此可以根據想要雜訊分佈的頻帶設計一高通濾波器,而得到對應的迴路濾波器 W z( )。 以處理音頻數位Σ-Δ調變器來說,本論文是讓雜訊轉移函數為一個 n 階的巴特沃司(Butterworth)高通濾波器。濾波器形式: NTF z z b z b a z b a a n n n n = − − + − − + − − + + − ( ) ( ) ( ) ( ) ( ) 1 1 1 1 1 1 2 1 2 L 1L 1 (3.27)
3.3.2 最佳化雜訊轉移函數(Noise Transfer Function)零點位置
式(3.27)的零點位置皆位於z= 1,而對於最小化頻寬內的雜訊能量(Noise Power)而言,可將這些零點妥善分佈在頻寬內達到最佳效果。 從Noise-Shaping 函數W−1( )z =D zn( ) / N zn( )來看,以極點(poles)位置固定的前 提下,要最小化訊號頻寬ωB內的雜訊能量(Noise Power)為: min min h h W e d h D z e d j n j B − Bz
1 ⇒z
0 2 0 2 ( ω) ( , ) ω ω ω ω ω (3.28) 其中 Dn( ,hz ejω)=ejnω +h e1 j n( −1)ω +h e2 j n( −2)ω+ +L hn 以下以線性代數來求其解: 令 h = [ ] z T v 1 z h h1 2 L hn and =[ej n( −1)ω ej n( −2)ω L ]H D e e e e e e e n j jn jn jn jn jn jn ( , ) [ ] [ ] [ ][ ] ( ) h v h v h h v v h v v h h v v h u ( )h h W( )h z z H z H z H z z T z z H z z T z H z z T z z H z T z z T z ω ω ω ω ω ω ω ω ω 2 1 1 2 = + + = + + = + + + = + + − − uT v z H( ) Re[ω = − ω ] [cos cos= ω ω cos ω]
e jn n
2 L
W v v
1 cos cos2 cos(n -1)
cos 1 cos
cos2 cos 1 cos2
cos
cos(n -1) cos2 cos 1
z z H ( ) Re[ ] Re ( ) ( ) ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω = =
L
N
MM
MM
MM
O
Q
PP
PP
PP
=L
N
MM
MM
MM
O
Q
PP
PP
PP
− − − − − − − − 1 1 1 1 2 1 2 2 1 2 e e e e e e e e e e e e j j j n j j j j j j j n j j L O M O M O O O L L O M O M O O O L J =z
ωB Dn( ,hz ejω) dω ω= B + p (T ωB)h h Q(+ T ωB)h 0 2 2 p (T ω ) = ω uT ω ω ω in ω in ω B B B B d s s n n B ( ) [sin ] 0 1 2 2z
= LQ( ) = W in in( in in in( in ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω B B B B B B B B B B B B B B B B B d s s n n s s s n n s B ( ) sin ) sin sin sin sin ) sin 0 1 2 2 1 1 1 1 2 2 1 2 2 1 1 1 2 2 1
z
= − − − −L
N
MM
MM
MM
MM
MM
M
O
Q
PP
PP
PP
PP
PP
P
L O M O M O O O L 藉由解∇hJ =0,可以得到最佳解h Q p ∗ = − (ω )− (ω ) B B 1 。以上是由最佳係數解求得零 點位置,另外也可直接找出最佳零點位置[28]。3.3.3 n 階 SDM 系統之設計流程
Step1. 設計迴圈濾波器(Loop Filter)、最佳化零點位置(Optimizing NTF Zeros):
W z N z D z b z b a z b a a z c z c a a n n n n n n n n n n ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) = = − + − + + − + − + + − − − − − 1 1 2 1 2 1 1 1 1 1 1 1 1 1 1 L L L L 得到b b a1, 2 1,K,b an n−1La1 and ,c c a1 2 1,K,c an n−1La1 Step2. 邊界| ( )|x k1 <2b1/ (1 2− c1)與最佳模態存在性| ( )|x k b | ( )| a c a x k 2 1 1 1 1 1 < + : 得到a1 Step3. 利用狀態變數限制方程式 x a a a A a a a r B a a a x m ss n m m ss m m ss ∞ ∞ − ∞ ∞ − ∞ ≈ 1 2 + ≤ 1 2 1 1 2 1 1 1 L L L 其中 A z N z N z B z D z N z W z W z N z D z N z b z b a z b a a D z z c z c a a m m n m m m n n k k k k k k k k k k ( ) ( ) / ( ) ( ) ( ) ( ) ( ) , ( ) ( ) / ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) = = − = = − + − + + = − + − + +
![圖 2.1.2 NPWM 與 UPWM 運作圖[10]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8488746.184597/19.892.261.685.312.1034/圖212NPWM與UPWM運作圖1.webp)
![圖 2.1.4 NPWM 與 UPWM 運作圖[12]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8488746.184597/20.892.156.801.271.718/圖214NPWM與UPWM運作圖12.webp)