國 立 交 通 大 學
機械工程學系
博 士 論 文
具額外阻尼之彈性板的導波波傳
Guided Wave Propagation in Elastic Plates
with Excessive Attenuation
研 究 生 : 許世明
指導教授
: 尹慶中 博士
具額外阻尼之彈性板的導波波傳
Guided Wave Propagation in Elastic Plates
with Excessive Attenuation
研 究 生:許世明 Student:Shih-Ming Hsu
指導教授:尹慶中 博士 Advisor:Dr. Ching-Chung Yin
國 立 交 通 大 學
機 械 工 程 學 系
博 士 論 文
A Dissertation
Submitted to Department of Mechanical Engineering
College of Engineering
National Chiao Tung University
in Partial Fulfillment of the Requirements
for the Degree of
Doctor of Philosophy
in
Mechanical Engineering
June 2011
Hsinchu, Taiwan, Republic of China
具額外阻尼之彈性板的導波波傳
研究生:許世明 指導教授:尹慶中 博士 國立交通大學機械工程學系博士班 摘 要 本研究是研究彈性平板的導波波傳為主,考慮平板本身的熱彈耦合效應,或者是其 表面黏滯液體負載所造成的額外阻尼,探討波傳遞時的頻散與衰減關係及其能量耗散。 前者代表一個動力系統含有狀態變數對時間t 一次微分的阻尼項,後者即為隱含於系統 本身彈性係數中的阻尼項。因此,本研究會區分成兩大主題。 第一個主題是探討一受單軸拉伸殘留應力之等向性平板的熱彈導波波傳問題。應用 自然、初始與最終三個狀態的聲彈理論,配合傳統熱彈理論,推導在初始狀態下描述的 熱彈統御方程式及其導波特徵方程式。利用曲線追蹤法針對複波數的虛部作複數尋根, 獲得熱彈導波的頻散與衰減頻譜。由數值結果可發現,除A 模態外,其餘模態在某些0 特定頻率下會出現最小衰減的驟降現象,稱之為Lamé 模態,它代表會在厚度方向形成 共振,而且在導波傳遞時的能量損耗最小。此外,本文亦探討波傳方向與單軸施力方向 的夾角為0、90與45之熱彈導波的頻散與衰減頻譜。 第二個主題是探討表面黏滯液體負載之玻璃平板的導波波傳問題。將黏滯性液體層 視為一具剪力剛性c55 i的假想性等向性固體,為動態黏滯係數, 為角頻率。 經由平板與液體層所架構的雙層結構全域矩陣,利用複數尋根方式獲得頻散與衰減曲線 關係,探討平板表面質點運動以及液體層內壓力變化的頻譜特性。除A 模態外,其餘0 模態在頻率接近Lamé 模態時會出現最小衰減的驟降現象,在固液界面上的質點軌跡會 出現逆轉現象。隨著頻率遞增,平板A 模態之位移與應力變化逐漸集中於固液界面,0 而S 模態則是集中於平板下表面。再者,液體層上下表面間壓力差變化及其均勻特性0 會與平板上表面質點軌跡運動的偏振狀態有直接關係。此外,亦探討液體層厚度改變對 相速度頻散與衰減曲線的影響。關鍵字: 殘留應力、熱彈聲波、黏滯液體負載、Lamé 模態、頻散、衰減、 曲線追蹤法、正則模態展開法。
Guided Wave Propagation in Elastic Plates
with Excessive Attenuation
Student: Shih-Ming Hsu Advisor: Dr. Ching-Chung Yin
Department of Mechanical Engineering National Chiao Tung University
Abstract
This dissertation mainly investigates the dispersion, attenuation, and energy dissipation of ultrasonic guided waves propagating in an elastic plate with excessive damping. The excessive attenuation caused by the thermoelastic coupling of plate or the external viscous fluid loading on the top surface of plate is taken into account. The former represents the damping resulted from the time derivative of state variables in a dynamic system, but the later denotes the intrinsic damping term in the elastic constants. Owing to the above two different excessive damping, the investigation is divided into two works.
Thermoelastic waves propagating in an isotropic thin plate exerted by a uniaxial tensile stress are represented in the first work. Characteristic equation of thermoelastic guided waves is formulated based on the theory of acoustoelasticity and classical thermoelasticity. Curve tracing method for complex root-finding is used to determine the attenuation, which is the imaginary part of the complex-value wavenumber. It is found that each plate mode of thermoelastic wave propagating in an isotropic plate with or without pre-stress has a minimum attenuation at a specific frequency except the A0 mode. These modes are called by
the Lamé modes, which are the volume resonances in the thickness direction and propagate along the plate with the least energy dissipation. Frequency spectra of the phase velocity dispersion and attenuation of thermoelastic waves propagating along various orientations in the uniaxial pre-stressed thin plate have further been discussed.
The second work describes an investigation of acoustic guided wave propagation in a glass plate overlain with a poly-vinyl-alcohol (PVA) layer. The PVA layer is modeled as a hypothetical isotropic solid with dynamic viscosity. Dispersion and attenuation curves, mode shape, trajectories of surface particles on the substrate, and pressure in the fluid layer are
studied numerically. Except for the A0 mode, a steeply decreasing attenuation and a reverse
trajectory of motion are observed near the frequency of Lamé mode for the different modes. With increasing frequency, displacement, stress, and energy of the A0 mode are significantly
confined to a region near the top surface of the plate. A similar phenomenon occurs near the bottom surface for the S0 mode. The pressure gradient and its distribution in the fluid layer
are directly related to the trajectories of surface particles on the interface of fluid and substrate. The symmetric modes, except for the S0 mode, at frequencies corresponding to the
maximum group velocity, are the appropriate choices for generating uniform acoustic pressure in the fluid layer. Moreover, a glass substrate overlain with a glycerin layer is also taken in account, and its frequency spectra of the phase velocity dispersion and attenuation have further been discussed.
Keywords: residual stress, thermoelastic waves, viscous fluid loading, Lamé mode,
誌 謝
自進入博士班進修,即承蒙指導教授 尹慶中博士多年來的耐心指導與鼓勵,除了 在研究方向引導與觀念啟發之外,並且協助解決種種研究上所遭遇的難題,使本論文得 以順利完成,首先要在此表達個人由衷的感謝與敬意。此外,游泰和學長、王多聞學長、 劉育翔、溫子逵、曾世華、羅世青、楊秋華、許家保、許家豪、黃俊傑、蔡德新、孫繼 增、張桓真、陳俊宏、黃國彰、施文斌、楊炘岳、蘇裕為、李政良、嚴承侯、潘權文、 蔡汶志、張逸涵、黃康哲、鍾重光、鄭博毅、吳昱瑾、賴佑年、蔡慶芳、鄭致遠、吳家 宇、湯士杰、黃室維、王裕太、蔡旻軒、吳旻修、李劭遠、郇心慧、梁均帆、黃仲平、 李柏勳、吳雨倩、何家豪諸位學弟妹,在個人的學習研究與生活上的協助與陪伴,克服 種種困難而順利前進。最後,在漫長的求學過程中,感謝我敬愛的父親 許昆輝先生與 母親 曾鳳英女士,二位妹妹曉苓與雅芳,以及內人亭均的全力支持與體諒,當然還有 女兒芷歆貼心的陪伴,使我能夠無後顧之憂,全心全意地專注在學業上,終能克服萬難 而獲得此學位。 謹以此文獻給我所有親愛的家人與朋友。 許 世 明 謹誌 中華民國100 年 7 月目 錄
中文摘要 ………. i 英文摘要 ………. iii 誌謝 ………... v 目錄 ………... vii 表目錄 ………... xi 圖目錄 ………... xii 符號說明 ………. xix 第一章 緒論 ………. 1 1.1 研究背景及動機 ………. 1 1.1.1 熱彈性耦合之聲導波 ………. 2 1.1.2 具液體負載之聲導波 ………. 5 1.2 文獻回顧 ………. 6 1.2.1 光聲光熱現象及技術 ………. 6 1.2.2 一般常見的薄膜殘留應力量測方法 ………. 8 1.2.2.1 基板曲率量測法 ………. 8 1.2.2.2 鼓漲測試法 ………. 8 1.2.2.3 高解析度 X 光繞射儀 ……… 9 1.2.2.4 顯微式 Raman 散射光譜儀 ……… 10 1.2.3 聲彈應力量測法 ………. 10 1.2.4 雷射超音波技術 ………. 12 1.2.5 熱彈理論的模型 ………. 13 1.2.6 熱彈理論的發展 ………. 161.2.7 正則模態展開法 ………. 18 1.2.8 超音波影響微小粒子排列 ………. 20 1.2.9 具液體負載之聲導波 ………. 21 1.3 內容簡述 ………. 22 第二章 具殘留應力的熱彈理論 ………. 33 2.1 座標系統描述 ………. 33 2.2 統御方程式 ………. 35 2.2.1 守恆定理 ………. 35 2.2.2 Euler 與 Lagrange 描述下的熱彈統御方程式 ……….. 39 2.2.3 增量狀態下的熱彈統御方程式 ………. 42 2.3 本構方程式 ………. 43 2.3.1 熱力學特徵函數 ………. 43 2.3.2 在自然狀態下描述 ………. 45 2.3.3 在初始狀態下描述 ………. 48 2.4 能量守恆以及互置理論 ………. 51 2.4.1 熱彈耦合的互置理論 ………. 52 2.4.2 模態正交特性 ………. 55 2.4.3 正則模態展開法 ………. 56 第三章 光聲效應之波傳理論 ………. 59 3.1 熱源輸入及其傅立葉積分轉換 ………. 59 3.2 水平X X 平面之座標轉換 ………... 62 1 2 3.2.1 立方性或等向性材料之假設 ………. 62 3.2.2 經座標轉換的本構關係與熱傳導方程式 ………. 64 3.2.3 特殊情況 ………. 67
3.2.4 統御方程式 ………. 68 3.2.5 Christoffel 方程式 ………... 69 3.3 徹體波的相速度 ………. 70 3.3.1 X X 平面波傳 ………... 70 1 3 3.3.2 X 方向 ……… 73 1 3.3.3 X 方向 ………... 74 3 3.4 平板導波的頻散方程式 ………. 76 3.4.1 水平方向的波傳 ………. 76 3.4.2 面內波傳 ………. 81 3.4.3 面外波傳 ………. 85 3.5 層狀介質結構 ………. 87 3.5.1 全域矩陣法 ………. 87 3.5.2 三層結構且上下面皆相鄰半無窮域介質 ………. 89 3.5.3 單層結構 ………. 89 3.5.4 雙層與三層結構 ………. 90 3.5.5 單層結構且其中一面相鄰半無窮域介質 ………. 90 3.6 光聲訊號的頻率響應 ………. 91 3.6.1 傅立葉積分轉換 ………. 91 3.6.2 表面施加的曳力與熱源 ………. 91 3.6.3 雷射激發之光聲訊號 ………. 94 3.6.4 層狀介質之應用 ………. 96 第四章 單層平板:數值結果與討論 ………. 101 4.1 單位與材料係數 ………. 101
4.2 徹體波的相速度 ………. 101 4.3 複數尋根之曲線追蹤法 ………. 103 4.4 等向性平板導波的頻散與衰減曲線 ………. 104 4.5 受單軸初始應力之平板導波的頻散與衰減曲線 ………. 106 第五章 表面具黏滯性液體負載的平板導波 ………. 133 5.1 理論模型 ………. 133 5.2 PVA 液體薄層 ………. 139 5.3 甘油液體薄層 ………. 143 第六章 結論與未來工作 ………. 169 6.1 結論 ………. 169 6.2 未來工作 ………. 170 參考文獻 ………. 171 附錄1 等向性平板中有無熱彈耦合效應之P 與 Q 矩陣 ……….. 187 附錄2 等向性平板中傳遞之熱彈導波的 Lamé 模態 ……….. 191 附錄3 表面受理想液體負載之平板導波的特徵方程式 ………. 197
表 目 錄
表4.1 在自然狀態以及單軸預應力T 為1i 0.02c 與44 0.04c 之初始狀態下 44 銅箔的材料係數。………. 109 表4.2 在自然狀態以及單軸預應力T 為1i 0.02c 與44 0.04c 之初始狀態下 44 縱波、橫波與Lamé 模態的波速資料。……….. 110 表5.1 最小衰減值出現位置,如圖5.5中的Lamé 模態(a至g點)以及 交點模態(o、p與q三點),頻率、波數、相速度、群速度與界面 處(X3 )軌跡振幅比的資料整理。……….. 143 0 表5.2 在平板之界面處(X3 0)與下表面(X3 H),出現特殊方向的 質點軌跡的頻率、波數與相速度的範圍。………. 144 表5.3 在界面處(X3 )質點軌跡出現最小振幅比0 |u u ,以及液體薄層 3 1| 之界面處(X3 )與上表面(0 X3 )間出現最少壓力差| (0)h p p h( )|, 頻率、波數、相速度與群速度的資料整理。………. 145 表5.4 平板(玻璃)與不同厚度之液體薄層(甘油)的截止頻率大小。……… 146圖 目 錄
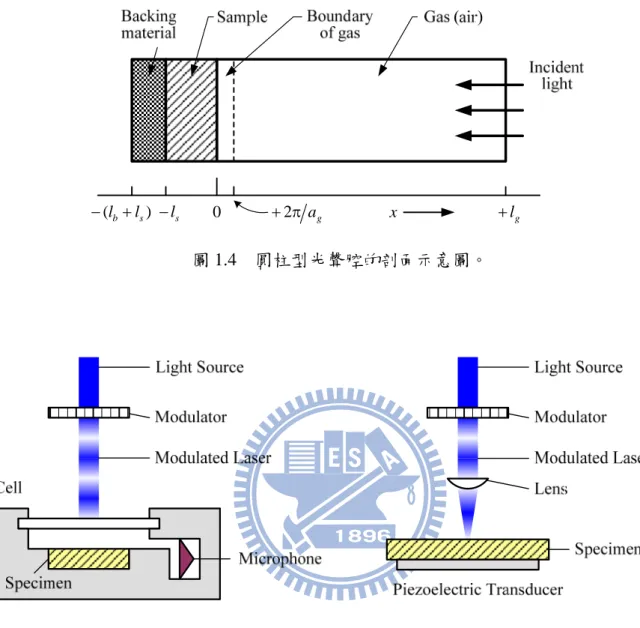
圖1.1 晶格不匹配造成薄膜產生拉應力與壓應力。………. 25 圖1.2 珠擊法示意圖及其殘留應力對厚度的分佈圖。………. 26 圖1.3 (a) 週期調制且強度為Gauss 分佈的光束照射在層狀結構表面的示意圖。 (b) 訊號接收處至熱源間之距離以及波傳方向與X 軸之夾角的示意圖。.. 27 1 圖1.5 圓柱型光聲腔的剖面示意圖。………. 28 圖1.4 (a) 麥克風光聲系統的示意圖; (b) 壓電光聲系統的示意圖。……... 28 圖1.5 (a) 光熱光偏轉法的示意圖; (b) 光熱光位移法的示意圖。………. 28 圖1.6 (a) 基板曲率量測法的示意圖; (b) 鼓漲測試的示意圖。………. 29 圖1.7 (a) X 光低掠角入射法的示意圖; (b) Bragg 繞射的示意圖。………….. 30 圖1.8 (a) 顯微式Raman 散射光譜儀; (b) Si 基材附近的受力分佈圖。……. 31 圖1.9 自然、初始與最終三個狀態的架構圖。………. 32 圖1.10 雷射超音波試驗發射與接收的配置圖。………. 32 圖3.1 週期調制且強度為Gauss 分佈的光束照射在單一平板表面的示意圖。…. 97 圖3.2 Gauss 分佈函數圖。……….. 97 圖3.3 座標轉換前,單一平板受水平軸向初始應力之示意圖, 其中n為波傳方向。……….. 98 圖3.4 座標轉換後,單一平板受水平軸向初始應力之示意圖, 其中波傳方向n與X 軸平行。……… 98 1 圖3.5 層狀介質的結構示意圖。………. 99 圖3.6 三層結構且上下介質皆為半無窮域的示意圖。………. 99 圖3.7 層狀結構模型的示意圖。………. 100 圖3.8 單層平板的波數與頻率關係。………. 100圖4.1 波數k 固定下,對(r k ,i f )的尋根示意圖。………. 111 圖4.2 應用外插法對頻散曲線作軌跡追蹤。………. 111 圖4.3 在無初始應力作用之單層平板,熱彈性導波的波數(a)實部k 與 r (b)虛部k 對頻率i f 的頻譜圖,其中符號 S 與 A 分別代表對稱與 反對稱模態,L0、S0、Lame0 與 R0 (藍色虛線)可見(4.1a-d)式之 定義,以及QL0 (藍色虛線)為(4.2a)式計算獲得準縱波之波數 QL0 QL0 k f c 的虛部結果。……….. 112 圖4.4 在無初始應力作用之單層平板,熱彈性導波的(a)相速度c 與 ph (b)群速度c 對頻率 f 的頻譜圖,其中符號 S 與 A 分別代表對稱 g 與反對稱模態,L0、S0、Lame0 與 R0 (藍色虛線)可見(4.1a-d)式 之定義。………. 113 圖4.5 在無初始應力作用之單層平板,熱彈性導波的波數虛部k 對於 i (a)頻率 f 與(b)波數實部k 的半對數頻譜圖,其中符號 S 與 A r 分別代表對稱與反對稱模態,以及QL0 (藍色虛線)為(4.2a)式 計算獲得準縱波之波數kQL0 f cQL0的虛部結果。……….. 114 圖4.6 在無初始應力作用之單層平板,熱彈性導波相較於純彈性導波, 在固定波數k 下,兩者之各個對稱模態的頻率往右偏移大小圖。 r 發現對稱Sn模態(n0,1, 2, )在k h 等於r 1 2 (n 時的偏移量是最少。…... 115 ) 圖4.7 在無初始應力作用之單層平板,熱彈性導波相較於純彈性導波, 在固定波數k 下,兩者之各個反對稱模態的頻率往右偏移大小圖。 r 發現反對稱Am模態(m1, 2,3, )在k h 等於r m時的偏移量是最少。…… 116 圖4.8 在無初始應力作用之單層平板,熱彈性導波相較於純彈性導波, 在固定相速度c 下,兩者之各個對稱模態的頻率偏移大小圖。 ph 發現各模態在波速等於cLame0時頻率的變化最小。………... 117 圖4.9 在無初始應力作用之單層平板,熱彈性導波相較於純彈性導波, 在固定相速度c 下,兩者之各個反對稱模態的頻率偏移大小圖。 ph
發現除了A 模態外,其餘各模態在波速等於0 cLame0時頻率的變化最小。.. 118 圖4.10 對稱與反對稱之Lamé 模態的駐波振形示意圖。 Sn模態(n0,1, 2, )會產生波長為 1 2 ( ) h n 的駐波, Am模態(m1, 2,3, )會產生波長為h m的駐波。……… 119 圖4.11 在T 為1i 0.02c 與44 0.04c 作用下之單層平板,沿44 X 方向傳遞(即1 0 ) 之熱彈性導波的波數(a)實部k 與(b)虛部r k 對頻率 f 的頻譜圖,其中 i 符號S 與 A 分別代表對稱與反對稱模態,L0、S0、Lame0 與 R0 (藍色虛線)可見(4.1a-d)式之定義,以及 QL0 (藍色虛線)為(4.2a)式 計算獲得準縱波之波數kQL0 f cQL0的虛部結果。……….. 120 圖4.12 在T 為1i 0.02c 與44 0.04c 作用下之單層平板,沿44 X 方向傳遞(即1 0 ) 之熱彈性導波的(a)相速度c 與(b)群速度ph c 對頻率g f 的頻譜圖,其中 符號S 與 A 分別代表對稱與反對稱模態,L0、S0、Lame0 與 R0 (藍色虛線)可見(4.1a-d)式之定義。……….. 121 圖4.13 在T 為1i 0.02c 與44 0.04c 作用下之單層平板,沿44 X 方向傳遞(即1 0 ) 之熱彈性導波的波數虛部k 對於(a)頻率i f 與(b)波數實部k 的半對數 r 頻譜圖,其中符號S 與 A 分別代表對稱與反對稱模態,以及 QL0 (藍色虛線)為(4.2a)式計算獲得準縱波之波數kQL0 f cQL0的虛部結果。.. 122 圖4.14 在T 為1i 0.02c 與44 0.04c 作用下之單層平板,沿44 X 方向傳遞(即2 90) 之熱彈性導波的波數(a)實部k 與(b)虛部r k 對頻率 f 的頻譜圖,其中 i 符號S 與 A 分別代表對稱與反對稱模態,L0、S0、Lame0 與 R0 (藍色虛線)可見(4.1a-d)式之定義,以及 QL0 (藍色虛線)為(4.2a)式 計算獲得準縱波之波數kQL0 f cQL0的虛部結果。……….. 123 圖4.15 在T 為1i 0.02c 與44 0.04c 作用下之單層平板,沿44 X 方向傳遞(即2 90) 之熱彈性導波的(a)相速度c 與(b)群速度ph c 對頻率 f 的頻譜圖,其中 g 符號S 與 A 分別代表對稱與反對稱模態,L0、S0、Lame0 與 R0 (藍色虛線)可見(4.1a-d)式之定義。………. 124
圖4.16 在T 為1i 0.02c 與44 0.04c 作用下之單層平板,沿44 X 方向傳遞(即2 90) 之熱彈性導波的波數虛部k 對於(a)頻率 f 與(b)波數實部i k 的半對數 r 頻譜圖,其中符號S 與 A 分別代表對稱與反對稱模態,以及 QL0 (藍色虛線)為(4.2a)式計算獲得準縱波之波數kQL0 f cQL0的虛部結果。.. 125 圖4.17 在T 為1i 0.02c 作用下之單層平板,傳遞方向為角度44 45之熱彈性 導波的波數(a)實部k 與(b)虛部r k 對頻率 f 的頻譜圖,其中符號 S 與 i A 分別代表對稱與反對稱模態,L0、S0、Lame0 與 R0 (藍色虛線) 可見(4.1a-d)式之定義,以及 QL (藍色虛線)為(3.43b)式計算獲得 準縱波之波數kQL f cQL 的虛部結果。……….... 126 圖4.18 在T 為1i 0.02c 作用下之單層平板,傳遞方向為角度44 45之熱彈性 導波的(a)相速度c 與(b)群速度ph c 對頻率 f 的頻譜圖,其中符號 S 與 g A 分別代表對稱與反對稱模態,L0、S0、Lame0 與 R0 (藍色虛線) 可見(4.1a-d)式之定義。……… 127 圖4.19 在T 為1i 0.02c 作用下之單層平板,傳遞方向為角度44 45之熱彈性 導波的波數虛部k 對於(a)頻率 f 與(b)波數實部i k 的半對數頻譜圖, r 其中符號S 與 A 分別代表對稱與反對稱模態,以及 QL 與 QSH (藍色虛線)為(3.43b)式計算獲得準縱波與準橫波之波數kQL f cQL 與kQT f cQT 的虛部結果。……… 128 圖4.20 傳遞方位角度 為0、45與90之熱彈性導波的S0、A1與S1模態, 出現最小衰減值的頻率位置與單軸初始應力T (1i )間的關係圖。……. 129 c44 圖4.21 傳遞方位角度 為0與45之熱彈性導波的S0、A1與S1模態, 最小衰減值大小與單軸初始應力T (1i )間的關係圖。………. 130 c44 圖4.22 單軸初始應力T 為1i 0.02c 與44 0.04c 之熱彈性導波的 S44 0、A1與S1模態, 出現最小衰減值的頻率位置與傳遞方位角度 間的關係圖。……….. 131 圖4.23 單軸初始應力T 為1i 0.02c 與44 0.04c 之熱彈性導波的 S44 0、A1與S1模態, 最小衰減值大小與傳遞方位角度 間的關係圖。……….. 132
圖5.1 具液體負載之平板結構幾何示意圖。………. 147 圖5.2 以界面X3 為基準,在介質 1 (液體)中,0 1 C 與C 分別為抵達波1 與離開波,在介質2 (玻璃)中,C 與2 C 分別為抵達波與離開波。2 ……... 147 圖5.3 厚度1 mm 玻璃板覆蓋厚度 0.01 mm PVA 液體薄層,板波模態的波數 (a)實部k 與(b)虛部r k 對頻率 f 的頻譜圖,其中符號 S 與 A 分別代表 i 對稱與反對稱模態,o、p與q三點分別代表A2與S2之交點以及A3 與S3之第一個與第二個交點。……… 148 圖5.4 厚度1 mm 玻璃板覆蓋厚度 0.01 mm PVA 液體薄層,板波模態的 (a)相速度c 與(b)群速度ph c 對頻率 f 的頻譜圖,其中符號 S 與 A g 分別代表對稱與反對稱模態,a至g點為Lamé 模態的出現位置, r、s與t三點分別為S1、S2與S3之群速度最大值的出現位置。………... 149 圖5.5 厚度1 mm 玻璃板覆蓋厚度 0.01 mm PVA 液體薄層,板波模態的 波數虛部k 對於(a)頻率 f 與(b)波數實部i k 的半對數頻譜圖,其中 r 符號S 與 A 分別代表對稱與反對稱模態,a至g點以及o、p與q 三點為各個模態之最小衰減值的出現位置,它們的特性可見表5.1。…... 150 圖5.6 位移u (實線)與1 u (虛線)示意圖。(a)為 Lamé 模態,即衰減頻譜的 3 a至g點。(b)為交點模態,即波數實部k 交會的r o、p與q三點。……... 151 圖5.7 厚度1 mm 玻璃板覆蓋厚度 0.01 mm PVA 液體薄層,板波模態在固液 界面(X3 )處,(a)質點軌跡振幅比0 |u u 以及(b)時間平均功率流 3 1| 密度 的頻譜圖,其中符號 S 與 A 分別代表對稱與反對稱模態, P1a 「」與「」代表出現順時針(cw)軌跡的頻率範圍,如表5.2所示。… 152 圖5.8 厚度1 mm 玻璃板覆蓋厚度 0.01 mm PVA 液體薄層,板波模態在下 表面(X3 H )處,(a)質點軌跡振幅比|u u 以及(b)時間平均功率流 3 1| 密度 的頻譜圖,其中符號 S 與 A 分別代表對稱與反對稱模態, P1a 「」與「」代表出現逆時針(ccw)軌跡的頻率範圍,如表5.2所示。.. 153 圖5.9 在頻率範圍1 至 10 MHz 間位移u (實線)與1 u (虛線)示意圖。 3
(a) A0模態,(b) S0模態。………. 154 圖5.10 平板上表面之質點軌跡示意圖。 (a) S0模態在頻率範圍1.2 至 3.0 MHz, (b) A1模態在頻率範圍3.4 至 5.2 MHz, (c) S1模態在頻率範圍5.6 至 7.4 MHz。………. 155 圖5.11 厚度1 mm 玻璃板覆蓋厚度 0.01 mm PVA 液體薄層,液體薄層 於界面(X3 )與上表面(0 X3 )間的壓力差頻譜圖。………. 156 h 圖5.12 位移u (實線)與1 u (虛線)示意圖。如3 圖5.4(b)所示,r、s與t 三點分別為S1、S2與S3之群速度最大值位置。………... 156 圖5.13 厚度1 mm 玻璃板覆蓋厚度 0.01 mm 甘油液體薄層,板波模態的 (a)相速度c 與(b)波數虛部ph k 對頻率 f 的頻譜圖,其中符號 S 與 i A 分別代表對稱與反對稱模態,各模態的截止頻率可參考表5.4。……... 157 圖5.14 厚度1 mm 玻璃板覆蓋厚度 0.05 mm 甘油液體薄層,板波模態的 (a)相速度c 與(b)波數虛部ph k 對頻率 f 的頻譜圖,其中符號 S 與 i A 分別代表對稱與反對稱模態,各模態的截止頻率可參考表5.4。……... 158 圖5.15 厚度1 mm 玻璃板覆蓋厚度 0.10 mm 甘油液體薄層,板波模態的 (a)相速度c 與(b)波數虛部ph k 對頻率i f 的頻譜圖,其中符號 S 與 A 分別代表對稱與反對稱模態,各模態的截止頻率可參考表5.4。……... 159 圖5.16 厚度1 mm 玻璃板覆蓋厚度 0.50 mm 甘油液體薄層,板波模態的 (a)相速度c 與(b)波數虛部ph k 對頻率 f 的頻譜圖,其中符號 S 與 i A 分別代表對稱與反對稱模態,各模態的截止頻率可參考表5.4。……... 160 圖5.17 厚度 1 mm 玻璃板覆蓋厚度 1.00 mm 甘油液體薄層,板波模態的 (a)相速度c 與(b)波數虛部ph k 對頻率i f 的頻譜圖,其中符號 S 與 A 分別代表對稱與反對稱模態,各模態的截止頻率可參考表5.4。……... 161 圖5.18 厚度1 mm 玻璃板覆蓋一個半無窮域之甘油液體,板波模態的 (a)相速度c 與(b)波數虛部ph k 對頻率 f 的頻譜圖,其中符號 S 與 i
A 分別代表對稱與反對稱模態,各模態的截止頻率可參考表5.4。……... 162
圖5.19 厚度1 mm 玻璃板覆蓋一個半無窮域之甘油液體,板波模態的
波數虛部k 對於(a)頻率i f 與(b)波數實部k 的頻譜圖,其中符號 r
符 號 說 明
(依出現順序排列) 0, i , f 自然、初始與最終三種狀態的上標符號。 , , , 以自然狀態座標系統作描述的下標符號。 , , , I J K 以初始狀態座標系統作描述的下標符號。 , , , i j k 以最終狀態座標系統作描述的下標符號。 t 時間。 , X , ( )x t 自然、初始與最終狀態的位置向量。 ,X ,x t( ) 在自然狀態下觀察的位置向量 、 X 與 ( )x t 。 J ,X ,J x t J( ) 在初始狀態下觀察的位置向量 、 X 與 ( )x t 。 j ,X , ( )j x t j 在最終狀態下觀察的位置向量 、 X 與 ( )x t 。 D Dt , t 函數( , )x t 對時間t 的全導函數與局部導函數。 i u ( X ) 自然狀態變形至初始狀態的位移增量。 f u ( x ) 自然狀態變形至最終狀態的位移增量。 u ( x X ) 初始狀態變形至最終狀態的位移增量。 i v , v f 位置函數 X 與 x 對時間t 的一次全導函數,即速度向量。 i v , v f 位置函數 X 與 x 對時間 t 的二次全導函數,即加速度向量。 i u, uf , u 在自然狀態下觀察的位移增量u 、i u 與f u。 i J u , f J u , u J 在初始狀態下觀察的位移增量u 、i u 與f u。 i j u , f j u , u j 在最終狀態下觀察的位移增量u 、i u 與f u。i v, vf 在自然狀態下觀察的速度向量v 與i v 。 f i J v , f J v 在初始狀態下觀察的速度向量v 與i v 。 f i j v , f j v 在最終狀態下觀察的速度向量v 與i v 。 f ijk
e , eIJK 排列(permutation)或 Levi-Civita 符號。 ˆj n Euler 描述下的表面法向量。 , dV , dA Euler 描述下的質量密度、單位體積與單位面積。 k t ( ˆnjjk) 施予法向量為 ˆn 之表面的曳力。 j q ( ˆn qj j) 經由法向量為 ˆn 之表面所釋出的熱能。 j ji Cauchy 應力。 j q , kij 熱通量與熱傳導常數。 j b , h 單位質量的徹體力與分佈熱源。 ij L (vi j, ) 空間速度梯度。 ij , , ij 微小應變與應變速率。 , u , ψ 單位質量的熵、內能與Helmholz 自由能。 , , 0 絕對溫度、參考溫度與溫度變化,關係為 。 0 F ( x X) 位移梯度。 ˆJ n Lagrange 描述下的表面法向量。 0 , dV , 0 dA Lagrange 描述下的質量密度、單位體積與單位面積。 0 IJ T 2nd Piola-Kirchhoff 應力。 IJ S Lagrange 應變。 J q , kIJ 熱通量與熱傳導常數。 , U , Ψ 熵( 0 )、內能(0u )與 Helmholz 自由能(0ψ )。
0 , i, f 在自然、初始與最終狀態下的質量密度。 u, uJ, uj 在自然、初始與最終狀態下觀察的位移增量。 i J v , f j v 在初始與最終狀態觀察自身狀態時的速度。 i v, vf 在自然狀態觀察初始與最終狀態時的速度。 f J v 在初始狀態觀察最終狀態時的速度。 i IJ ( i IJ T ), f ij 在初始與最終狀態下觀察的 Cauchy 應力。 i T, Tf 在自然狀態觀察初始與最終狀態時的2nd Piola-Kirchhoff 應力。 i IJ T , f IJ T 在初始狀態觀察初始與最終狀態時的2nd Piola-Kirchhoff 應力。 T 在自然狀態觀察初始至最終狀態間的應力增量。 IJ T 在初始狀態觀察初始至最終狀態間的應力增量。 i S, Sf 在自然狀態觀察初始與最終狀態時的微小應變。 i IJ S , f IJ S 在初始狀態觀察初始與最終狀態時的微小應變。 S 在自然狀態觀察初始至最終狀態間的應變增量。 IJ S 在初始狀態觀察初始至最終狀態間的應變增量。 i J q ( i J q ), f j q 在初始與最終狀態下觀察的熱通量。 i q , qf 在自然狀態觀察初始與最終狀態時的熱通量。 i J q , qJf 在初始狀態觀察初始與最終狀態時的熱通量。 q 在自然狀態觀察初始至最終狀態間的熱通增量。 J q 在初始狀態觀察初始至最終狀態間的熱通增量。 0 k ( k ) 在自然狀態下的熱傳導常數。 i IJ k ( kIJ) 在初始狀態下的熱傳導常數。
f ij k ( ) kij 在最終狀態下的熱傳導常數。 i , f 初始與最終狀態相較於自然狀態時的溫度變化。 0 , , i f 在自然、初始與最終狀態下的絕對溫度。 初始至最終狀態間的溫度差。 i , f 在初始與最終狀態下單位質量的熵。 oi , of 在自然狀態觀察初始與最終狀態時的熵。 if ( ) 在初始狀態觀察最終狀態時的熵。 初始至最終狀態間的熵增量。 f b , f I b , b if 在自然、初始與最終狀態下觀察之單位質量的徹體力。 f h 在最終狀態下輸入之單位質量的分佈熱源。 dU ,dW , dQ 內能變化量、外界對系統做功、以及系統自外界吸收熱能。 U ,Ψ ,H ,G 內能、Helmholz 自由能、熱焓與 Gibbs 自由能。 ( , )t 自然狀態座標系統所描述的N階張量。 ( , ) IJK L t X 初始狀態座標系統所描述的N階張量。 J det ( X ) 自然與初始狀態之座標系統間的 Jacobi 行列式。 0 , dV0, dA0 在自然狀態下的質量密度、單位體積與單位面積。 IJKL c , cPQ 在自然狀態下原始的二階彈性常數。 IJKLMN c , c PQR 在自然狀態下原始的三階彈性常數。 IJ , P 在自然狀態下原始的熱壓常數。 IJ k , kP 在自然狀態下原始的熱傳導常數。 , 在自然狀態下原始的熱常數。 E C 在自然狀態下原始的熱容常數。
i , dVi, dAi 在初始狀態下的質量密度、單位體積與單位面積。 0 , i 在自然與初始狀態下的絕對溫度。 IJKL c , cPQ 有效彈性常數。 IJ , P 有效熱壓常數。 IJ k , kP 有效熱傳導常數。 有效熱常數。 IJ T , TP 2nd Piola-Kirchhoff 應力。 i IJ T , i P T 殘留應力或初始應力。 IJ S , SP 微小應變。 , I J u , i, I J u , i NN e 位移梯度、初始位移梯度與體積膨脹。 , 熵增量與溫度差。 J b , h 單位質量的徹體力與分佈熱源。 t ( n Tˆ ) 表面法向量為 ˆn 的施加曳力。J in q ( n qˆ ) 表面法向量為 ˆn 的輸入熱能。J b, q 徹體力b 與熱通量I q 之粗體表示。I v, u 速度v 與位移I u 之粗體表示。I T , S 應力T 與應變IJ S 之粗體表示。IJ c , 彈性常數cIJKL與熱壓常數IJ之粗體表示。 1 2 3 ˆ [ ,n n nˆ ˆ ˆ, ] n 表面法向量,且nˆ12 nˆ22 nˆ32 。 1 1
ˆe , ˆe , 2 ˆe 3 沿X 、1 X 與2 X 方向上的單位向量。3
, ( , , )
m n m n
1 ( , ) m a X 模態展開項的待定係數。 s 1 ( , ) n f X 外界輸入的表面源。 v 1 ( , ) n f X 外界輸入的體積源。 o o o 1 2 3 -O X X X 座標轉換前的座標系統。 1 2 3 -O X X X 座標轉換後的座標系統。 水平X X 平面作旋轉角度。1 2 m, n 座標轉換矩陣元素,其中mcos 與nsin 。 o IJKL c , oi IJ T , 座標轉換前的彈性常數與初始應力。 o IJ , o IJ k , 座標轉換前的熱壓常數與熱傳導常數。 o 座標轉換前的熱常數。 o i I b , ih o 座標轉換前的徹體力與熱源。 1 3 [ , ]n n n 波前的單位波傳向量,且n12n32 。 1 U 元素UI (I 1, 2,3, 4)所構成的狀態向量。 (U1,U2,U3) 位移(u1,u2,u3)的待定係數。 4 U 溫度差的待定係數。 IJ , , K Christoffel 方程式中元素的張量表示。 I k A (k 0, 2, 4,6) 展開 Christoffel 方程式獲得c 之2 4 次多項式的係數。 k A (k 0, 2, 4) 展開Christoffel 方程式獲得c 之2 3 次多項式的係數。 QT c , cQL, cQth 準橫波、準縱波與準熱波的徹體波相速度。 PT c , cSH 純橫波與面外剪力波的徹體波相速度。 L c , cth 純縱波與純熱波的徹體波相速度。 λ c 彈性與熱性兩者間的耦合項。
, , f , k 角頻率、角波數、頻率與波數,關係為 與2 f 。 2 k 1 3 [ , ] 導波波傳的波數向量,關係為1232等於徹體波角波數之平方。 1 ( ) 導波波傳沿水平X 方向的角波數。1 3 ( ) 導波波傳沿厚度X 方向的角波數。3 IJ a , bIJ, cIJ Christoffel 方程式中 之 2 次、1 次與 0 次項的係數。 k B (k 0, 2, 4,6) 展開 Christoffel 方程式獲得 之 4 次多項式的係數。 2 k B (k 0, 2, 4) 展開Christoffel 方程式獲得 之 3 次多項式的係數。 2 k 之 4 次多項式的複數根,其中2 k 1, 2,3, 4。 k C 由邊界條件決定的待定係數。 ik p (u1,u2,u3,)各分量的比例。 X , Y , Z 分別代表X 、1 X 與2 X 方向。3 ,ik qX , qY,ik 表面法向量為X 與1 X 方向之2 (t1,t2,t3,qin)各分量的比例。 ,ik qZ (qik) 表面法向量為 3 X 方向之(t1,t2,t3,qin)各分量的比例。 X V , V , Y V Z 元素VX, I、VY, I與VZ,I (I 1, 2,3, 4)所構成的狀態向量。 (VX,1,VX,2,VX,3) 表面法向量為X 方向之曳力1 (t1,t2,t3)的待定係數。 (VY,1,VY,2,VY,3) 表面法向量為X 方向之曳力2 (t1,t2,t3)的待定係數。 (VZ,1,VZ,2,VZ,3) 表面法向量為X 方向之曳力3 (t1,t2,t3)的待定係數。 ,4 VX , VY,4, VZ,4 表面法向量為X 、1 X 與2 X 方向之熱能輸入3 q 的待定係數。in P 元素pik ( ,i k 1,2,3, 4)所構成的矩陣。 X Q , Q Y 元素qX,ik與qY,ik ( ,i k 1, 2,3, 4)所構成的矩陣。 Z Q ( Q ) 元素qZ,ik或qik ( ,i k 1, 2,3, 4)所構成的矩陣。
3 (X ) D 元素e i kX3 (k 1, 2,3, 4)所構成的對角矩陣。 C 元素Ck (k 1, 2,3, 4)所構成的向量。 ( , ) 頻散及衰減關係的特徵方程式。 S k C , A k C 由邊界條件決定之對稱與反對稱模態的待定係數。 S U , U A 元素UI (I 1, 2,3, 4)所構成之對稱與反對稱模態的狀態向量。 S X V , V XA 元素VX, I (I 1, 2,3, 4)所構成之對稱與反對稱模態的狀態向量。 S Y V , V YA 元素VY, I (I 1, 2,3, 4)所構成之對稱與反對稱模態的狀態向量。 S Z V , V ZA 元素VZ,I (I 1, 2,3, 4)所構成之對稱與反對稱模態的狀態向量。 S ,ik qZ , A ,ik qZ 對稱與反對稱模態之(t1,t2,t3,qin)各分量的比例。 S,A( , ) 對稱與反對稱模態之頻散及衰減關係的特徵方程式。 h 熱彈平板的厚度。 P 元素pik ( ,i k 1,3, 4)所構成的矩陣。 X Q , Q Y 元素qX,ik與qY,ik ( ,i k 1,3, 4)所構成的矩陣。 Z Q ( Q ) 元素qZ,ik或qik ( ,i k 1,3, 4)所構成的矩陣。 3 (X ) D 元素e i kX3 (k 1,3, 4)所構成的對角矩陣。 C 元素Ck (k 1,3, 4)所構成的向量。 S,A( , ) 面內波傳之對稱與反對稱模態之頻散及衰減關係的特徵方程式。 S,A( , ) 面外波傳之對稱與反對稱模態之頻散及衰減關係的特徵方程式。 對稱模態為n (n0,1, 2, ),及反對稱模態為m1 2 (m0,1, 2,)。 m U 第m層之元素UI( )m (I 1, 2,3, 4)所構成的狀態向量。 m V (VZ,m) 第m層之元素VZ( ),mI (I 1, 2,3, 4)所構成的狀態向量。
( )m k 第m層之 之 4 次多項式的複數根,其中2 k 1, 2,3, 4。 ( )m ik p 第m層之(u1,u2,u3,)各分量的比例。 ( ) , m ik qZ ( ( )m ik q ) 第m層之表面法向量為X 方向之3 (t1,t2,t3,qin)各分量的比例。 ( )m k C 第m層之由邊界條件決定的待定係數。 m P 第m層之元素pik( )m (i k, 1, 2,3, 4)所構成的矩陣。 m Q (QZ,m) 第m層之元素qZ,( )ikm 或qik( )m ( ,i k 1,2,3, 4)所構成的矩陣。 3 ( ) m X D 第m層之元素e i k( )mX3 (k 1, 2,3, 4)所構成的對角矩陣。 m E 第m層之元素ei( )kmhm (k 1, 2,3, 4)所構成的對角矩陣。 m C 第m層之元素Ck( )m (k 1, 2,3, 4)所構成的向量。 1 m Z , Zm 第m層之上表面與下表面位置,其中m1, 2,3, , M 。 m h 第m層之厚度,定義hm ZmZm1。 m 在界面處(X3 Zm)的不連續點,包括位移u 與溫度差I 。 m F 在界面處(X3 Zm)的外界施加,包括曳力t 與熱輸入I q 。in 0 m 代表第0 層,屬於「上半無窮域」。 0 U 上半無窮域之元素UI(0) (I 1, 2,3, 4)所構成的狀態向量。 0 V (VZ,0) 上半無窮域之元素VZ(0),I (I 1, 2,3, 4)所構成的狀態向量。 (0) k 上半無窮域之 之 4 次多項式的複數根,其中2 k 1, 2,3, 4。 0 P 上半無窮域之元素pik(0) ( ,i k 1,2,3, 4)所構成的矩陣。 0 Q (QZ,0) 上半無窮域之元素qZ(0),ik或qik(0) ( ,i k 1, 2,3, 4)所構成的矩陣。 0(X3) D 上半無窮域之元素e i ( 0 )k X3 (k 1, 2,3, 4)所構成的對角矩陣。 0 C 上半無窮域之元素Ck(0) (k 1, 2,3, 4)所構成的向量。
1 m M 代表第(M )層,屬於「下半無窮域」。 1 1 M U 下半無窮域之元素UI(M1) (I 1, 2,3, 4)所構成的狀態向量。 1 M V (VZ,M1) 下半無窮域之元素VZ(,MI1) (I 1, 2,3, 4)所構成的狀態向量。 (M 1) k 下半無窮域之 之 4 次多項式的複數根,其中2 k 1, 2,3, 4。 1 M P 下半無窮域之元素pik(M1) ( ,i k 1,2,3, 4)所構成的矩陣。 1 M Q (QZ,M1) 下半無窮域之元素 ( 1) , M ik qZ 或qik(M1) (i k, 1, 2,3, 4)所構成的矩陣。 1( 3) M X D 下半無窮域之元素e i (kM1)X3 (k 1, 2,3, 4)所構成的對角矩陣。 1 M C 下半無窮域之元素Ck(M1) (k 1, 2,3, 4)所構成的向量。 in( ,X X t1 2, ) q 雷射光於試件表面X3 處的輸入熱源。 0 0 I , a0 雷射TEM00模態的輸出功率(單位 W)與光束半徑。 R 試件的光學反射係數。 1 2 ( , ) g X X Gauss 空間分佈函數,且
g X X dX dX( ,1 2) 1 2 1。 ( ) f t 時間變化曲線,分為連續波(CW)與脈衝(pulse)兩種型式。 H( )t Heaviside 單位步階函數。 c , fc 調制角頻率與調制頻率。 r , p 上升時間與脈衝時間,關係為p 2r。 in( , , ) 1 2 Q qin( ,X X t1 2, )對(X1,X2)與 t 的 Fourier 轉換。 in( , X2, ) Q qin( ,X X t1 2, )對X 與 t 的1 Fourier 轉換。 1 2 ( , ) G g X X 對變數( ,1 2) (X1,X2)的二維 Fourier 轉換。 2 ( , ) G X g X X 對變數( ,1 2) X 的一維1 Fourier 轉換。 ( ) F ( )f t 對時間 t 的Fourier 轉換。 erf ( ) 誤差函數,定義為erf ( ) 2
0 ex2dx與 r 2 2 ( ) i 。top Z 層狀介質或平板之上表面位置。 1 3 ( ,X X , ) 受外界輸入源激發後的物理場,其中為u、、 T 或q。 3 ( , , ) n n X 在某一組( , ) 下的特徵模態。 1 ( , ) n a X 正X 方向傳遞之模態振幅。 1 1 ( , ) n a Xt Z t (~tZ,I, I 1, 2,3)所造成的模態振幅。 1 ( , ) n a Xq in q 所造成的模態振幅。 1 ( , )X Z t 上表面位置受到一個施加曳力,作用範圍為t X1 t。 in( , )X1 q 雷射光束照射造成的熱源輸入,作用範圍為q X1q。 ( , ) Z T tZ( , )X1 的空間域Fourier 轉換。 in( , ) Q qin( , )X1 的空間域Fourier 轉換。 t , q 上表面受到 Z t 與q 激發後的物理場,其中 為in u、、 T 或q。 ( , ) I n E 第n個模態在頻率 下,表面質點速度大小的可激發性函數。 4( , )n E 第n個模態在頻率 下,表面質點溫度大小的可激發性函數。 L0 c , c S0 在自然狀態下的縱波波速與橫波波速。 R0 c , cLame0 在自然狀態下的雷利波波速與Lame 模態波速。 QL0 c , cQth0 在自然狀態下的準縱波波速與準熱波波速。 th0 c , c λ0 在自然狀態下的熱波波速,以及熱彈係數造成的耦合項。 [100] L1 c , [001] S1 c , [010] S1 c 在初始狀態下沿X 方向的縱波波速與 2 個橫波波速。 1 [010] L2 c , [001] S2 c , [100] S2 c 在初始狀態下沿X 方向的縱波波速與 2 個橫波波速。 2 [001] L3 c , [100] S3 c , [010] S3 c 在初始狀態下沿X 方向的縱波波速與 2 個橫波波速。 3 Lame1 c ,cLame2 沿X 與1 X 方向的 Lame 模態波速。 2
[100] L1 c 縱波波速c[100]L1 與c 間的波速差。 L0 [010] L2 c 縱波波速c[010]L2 與c 間的波速差。 L0 [001] L3 c 縱波波速c[001]L3 與c 間的波速差。 L0 [001] S1 c , [010] S1 c 2 個橫波波速( [001] S1 c , [010] S1 c )與c 間的波速差。 S0 [001] S2 c , [100] S2 c 2 個橫波波速( [001] S2 c , [100] S2 c )與c 間的波速差。 S0 [100] S3 c , [010] S3 c 2 個橫波波速( [100] S3 c , [010] S3 c )與c 間的波速差。 S0 Lame1 c
,cLame2 2 個 Lame 模態波速(cLame1,cLame2)與cLame0間的波速差。
k 複波數,定義為k k r iki kr(1i γ 2 ) 。 r k , k i 複波數k的實部項與虛部項。 i k , γ 每單位波傳距離與每單位波長的波數衰減。 ph c ( f kr ) 相速度。 g c ( ) f kr 群速度。 λ, μ 等向性材料的Lamé 常數。 11 c , c , 13 c 55 等向性材料的彈性常數。 k, , , 等向性材料的熱傳導常數、熱壓常數、熱膨脹常數與熱常數。 φ , ψ 等向性材料的縱波與橫波勢函數。 , 水平X 方向與厚度1 X 方向的角波數。 3 , c 徹體波的角波數與相速度。 下標符號,可代表S、L、th、QL 與 Qth 波。 λ1 , λ2 計算角波數QL與Qth所定義的耦合項。 λ1 o , o λ2 計算相速度c 與QL c 所定義的耦合項。 Qth QL e , e QL 與 Qth 波的振幅比例。 Qth
f , κ , f f 液體層的質量密度、體積模數與動態黏滯係數。 11 f c , c , 13f 55 f c 液體層的等向性假設之彈性常數。 f φ , ψ f 液體層的縱波與橫波勢函數。 f I u , f IJ T , p 液體層的位移、應力與壓力差。 Lf c , c Sf 液體層的縱波與橫波波速。 fluid c 液體層c 忽略頻散與衰減影響的縱波波速。 Lf Lf , Sf 液體層的縱波與橫波角波數。 Lf , Sf 液體層在X 方向的縱波與橫波角波數。 3 h 液體層厚度。 1 U 液體層位移向量{u ,1f u }3f T。 1 V , V 1 液體層應力向量{T ,31f T }33f T與{T ,11f T }13f T。 1 C , C1 液體層中平面波離開與抵達固液界面的振幅係數。 ik f p 液體層中位移(u ,1f 3 f u )各分量的比例。 ik f q , qik f 液體層中表面法向量為X 與3 X 方向之曳力(1 t ,1f 3 f t )各分量的比例。 k f 液體層中壓力差 的比例。 p Lf C , CSf 液體層中縱波與橫波振幅大小。 1 P 液體層中元素pik f ( ,i k 1,3)所構成的矩陣。 1 Q , Q1 液體層中元素qik與q ( ,ik i k 1,3)所構成的矩陣。 κ 液體層中元素k f (k 1,3)所構成的行向量。 1 D 液體層中元素(e i SfX3,e i LfX3)所構成的對角矩陣。 1 E 液體層中元素(eiSfh,eiLfh)所構成的對角矩陣。
H 平板層厚度。 2 U 平板層位移向量{u ,1 u }3 T。 2 V , V 2 平板層應力向量{T ,31 T }33 T與{T ,11 T }13 T。 2 C , C2 平板層中平面波離開與抵達固液界面的振幅係數。 ik p 平板層中位移(u ,1 u )各分量的比例。 3 ik q, q ik 平板層中表面法向量為X 與3 X 方向之曳力(1 t ,1 t )各分量的比例。 3 L C, CS 平板層中縱波與橫波振幅大小 2 P 平板層中元素pik (i k, 1,3)所構成的矩陣。 2 Q , Q2 平板層中元素qik與q ( ,ik i k 1,3)所構成的矩陣。 2 D 平板層中元素(e i SX3,e i LX3)所構成的對角矩陣。 2 E 平板層中元素(eiSH,eiLH)所構成的對角矩陣。 a flowout E (Pn n, ) 通過厚度X 方向某一截線之時間平均功率流總和。 3 1a P 通過厚度X 方向某一截線之時間平均功率流密度。 3 0 u 液體與固體在平行於界面(沿X 方向上)的切向位移差。 1 f-f( , ) 平板的上下表面皆為自由邊界之特徵方程式。 s-f( , ) 平板的上表面為滑動邊界及下表面為自由邊界之特徵方程式。
第一章 緒論
本研究是以彈性板的導波波傳為主,考慮平板本身的熱彈耦合效應,或者是其表面 黏滯液體負載所造成的額外阻尼,探討波傳時的頻散與衰減關係及其能量耗散。在一個 理想無限彈性介質中行進之彈性波在傳遞過程中並不會發生衰減,只有當遇到介質的不 連續界面,產生波的反射、折射及繞射使波的能量傳遞方向發生改變,但沒有出現能量 型式的轉換。一般而言,彈性波會出現隨著傳遞距離增加而逐漸衰減的現象,有下列兩 種情況:熱彈波(thermoelastic waves)在等向性介質傳遞時,只有縱波才伴隨有熱效應出 現,產生將應變能轉變為熱能的耗散過程,從而使波在傳遞過程中產生衰減;另一種為 黏彈波(viscoelastic waves),由於介質中有阻尼或內摩擦的存在,縱波與橫波在傳遞過程 中皆有能量損失或耗散,此現象稱為介質的黏滯性吸收。由上述得知,一個動力系統若 含有狀態變數對時間 t 的一次微分項,在系統中的波傳就會發生振幅衰減以及能量耗散 的現象。同理,液體層的黏滯特性就相當是系統中一內部阻尼項,它是隱含於材料係數 中的阻尼,不同於熱彈耦合理論中額外熱傳導方程式所造成的阻尼效應。 光聲(photoacoustic, PA)或光熱(photothermal, PT)效應所導致的熱彈波是屬於上述的 第一種情形,它主要是應用於量測材料的光電、光化學、熱物理與彈性等性質,可應用 於量測試件於不同深度之次表面的結構訊息。根據線性熱彈理論(thermoelasticity)以及 配合聲彈理論(acoustoelasticity),推導內含殘留應力之層狀介質的熱彈波的波傳,並於 試件表面上考慮一熱源輸入且其強度經週期性調制(modulation),模擬分析試件表面的 光聲光熱效應對於不同殘留應力(residual stress)的變化。 黏滯性液體本身是屬於上述的第二種情形,其動態黏滯係數(dynamic viscosity)便是 一個內部阻尼項,將液體層簡化為含有動態黏滯係數之假想的等向性固體(hypothetical isotropic solid),推導具液體層負載之平板結構的導波波傳特徵方程式,數值計算並分析 其導波波傳的頻散與衰減特性,以及各模態的位移、應力、液體薄層壓力差分佈與平板 表面質點運動軌跡。此外,本文亦探討改變液體層厚度對平板導波之頻散與衰減特性所 造成的影響。1.1 研究背景及動機
1.1.1 熱彈性耦合之聲導波 [1-6]
薄膜材料(thin film materials)本身具有電、磁和光等方面的特殊性質,其範圍包括了 與相對較厚基材結合的薄膜、多層薄膜材料(multilayer materials)、鍍於基材上之圖案化 薄膜(patterned films)以及無支撐薄膜(free-standing films)等,近年來被廣泛的應用在許多 不同的領域,尤其是在超大型積體電路(VLSI)、半導體或微機電(MENS)製程裡,薄膜 元件的缺陷與否更是一大關鍵。以薄膜材料成長或沈積的方式而言,如化學氣相沈積 (chemical vapor deposition, CVD)、熱氧化(thermal oxidation)、濺鍍(sputtering)、蒸鍍 (evaporation)等,都會使基材表面的薄膜發生變形而產生應力殘留。舉例來說,薄膜與 基材之間在接合時,由於兩者本身晶格常數(lattice constant)不同,在介面(interface)處常 會導致基材表面的薄膜發生壓縮或拉伸變形,如圖1.1所示。根據1996 年 Kuo 等[1]對
鑽石薄膜在作CVD 過程中可能造成殘留應力的產生原因,分別敘述如下:
(1) 熱應力(thermal stress) :主要是在沈積後的冷卻過程中,由於薄膜與基材之th 間熱膨脹係數(thermal expansion coefficient)上的差異所造成。
(2) 相變換(phase transformation) :其次是在沈積後的冷卻過程中,因相變換ph 所導致的殘留應力。
(3) 磊晶應力(epitaxial stress) :發生在相同晶體結構,但不同晶格常數之薄膜ep 與基材的介面,產生了半契合(semi-coherent)或契合(coherent)情況所導致。 (4) 本質應力(intrinsic stress) :主要是因為材料中缺陷(defect)的存在所造成,in
例如晶界(grain boundary)、差排(dislocation)、孔洞(void)或插入(impurity)等。 因此,殘留應力泛指的是結構體中發生了不均勻的彈性或彈塑性變形,在定溫且無外力 作用下,為達到靜力平衡而存在於結構體內的彈性應力。一般來說,無論是對機械加工 製程,或是對半導體或微機電製程而言,殘留應力的存在容易使機械工件或薄膜元件的 發生變形,造成尺寸上的誤差,並會減損使用壽命及強度。然而,殘留應力的存在並非 完全只有負面的影響,有時反而是個有利因素。 舉例來說,從IV 族半導體材料 Si 本身的固態特性來觀察,其能帶結構為間接能隙
(indirect band gap),發光效率極低,在光電子元件的領域中一直是沒有地位的。另外, Si 在室溫的電子遷移率(mobility)也比 GaAs 約低 5 倍,因此在製備高速元件方面上並不
佔有優勢。但為什麼需要受應變的Si 材料?根據 2002 年 Samoilov 與 Thilderkvist [2], 提到此應變主要會影響電子或電洞遷移率,比如在 p-MOSFET 中電洞遷移率提高了 30~40%,在 n-MOSFET 中電子遷移率飽和在 20%。另外,在 2003 年 Mooney 等[3]亦
提到此應變會改變其能帶結構,進而增加其遷移率。隨著 Si 分子束磊晶技術日趨成熟
以及 Si1-xGex/Si 超晶格(superlattice)或量子阱(quantum corral)等新型材料質量的日益完
善,人們希望藉助於能帶工程,對以 Si 為基底的低維量子體系的電學和光學特性進行 裁剪,發掘出嶄新的物理現象,給予Si 基底材料新的活力並孕育出新的方向。 另一方面在機械製程中,殘留應力產生的原因主要是因鑄造、焊接、切削、熱處理、 珠擊(shot peening)等加工所導致。如表面加工製程中的珠擊法,如圖1.2所示[4],就是 利用硬度較高的珠粒(或鋼珠),在機械工件的表面作高速噴擊,使表面受到密集均勻的 撞擊力,讓表層造成塑性變形而產生殘留壓應力,使表面能夠承受較大的拉伸應力,並 有效抑制表面的裂紋成長,增加機械元件的疲勞強度。目前,珠擊技術的應用仍以汽車 與航太工業相關用途的零件為主,主要是改善工件的耐疲勞性、抗應力腐蝕以及抗微震 磨耗(fretting)等,以提高工件使用壽命與可靠度。近年來,珠擊技術的應用越來越廣泛, 而且其範圍已經延伸至模具、精密零件等領域。
對於表面聲波(surface acoustic wave, SAW)元件,在 1976 年 Nalamwar 與 Epstein [5]
探討了初始應力以及彈性係數與密度隨應變的改變,對表面聲波傳播速度變化的影響, 並且比較了石英(quartz)之 YX 切面以及鈮酸鋰(LiNbO3)之 YZ 切面的數值與實驗結果。
在2005 年 Kumon 與 Hurley [6]則針對鍍在單晶矽基材上的氮化鈦(TiN)薄膜,厚度範圍 考慮在0.287-3.330 m 以及 0.5-5.4 GPa 等雙軸(equi-biaxial)壓應力,隨著厚度的減少與 壓應力的增加,可獲得有效的二階彈性係數c11、c44與c 減少,以及66 c12、c 與13 c 增加,33 並利用實驗數據來擬合反算自然狀態下的二階彈性係數c11與c 以及三階彈性係數13 111 c 、c112與c123。因此,在元件內部加上殘留拉應力,能使元件的橫波波速與彈性常數 增加,增強剛性並提高表面聲波的頻率,可應用於高頻的射頻(radio frequency, RF)元件 上,為了探究殘留應力對表面聲波元件之傳遞波速及其頻率的影響,亟需可靠且有效的 殘留應力量測方法。 過去二十多年,光聲光熱效應已被歐、美、蘇等國家研究發掘出潛力。光聲顯微鏡 (photoacoustic microscopy, PAM)技術的研究主要是針對各種金屬、陶瓷、塑膠材料內部 的熱物理性質,以及表面或次表面(subsurface)的微細結構,對於與應力相關的研究卻是
寥寥無幾。若能將此一技術拓展至量測材料內部的殘留應力,對於在半導體或微機電製 程等的改良,將會是一個有利的工具。光聲顯微鏡是基於固體的光聲光熱效應,當材料 受到光線照射時,吸收光能而受激發,然後通過非輻射的消除激發過程,將吸收的光能 全部或部分地轉變成為熱能。假設照射光束(雷射)的強度先經過週期性的調制,在材料 表面上就會產生週期性的溫度變化。溫度變化會使材料熱脹冷縮,內部的應力和應變也 會產生週期性的變化,產生週期性熱彈性變形。利用感測器將熱彈性變形轉換為電子訊 號,其頻率與光的調制頻率相同,強度和相位則由材料本身的光學、熱學、彈性特性及 樣品的幾何形狀決定。再透過鎖相(lock-in)技術獲得微弱的時諧電子訊號之強度和相位 訊息,藉以分析材料內部的物理性質。再者,鎖相放大器(lock-in amplifier)是用來量測 隱藏在雜訊中的微小物理量(nV),這主要是在訊號中挑選出與某一特定參考頻率符合的 成分,並利用相位靈敏檢測(phase sensitive detection, PSD)過濾掉參考頻率以外的雜訊,
其缺點是高成本以及大部分頻率最高只達到100-200 kHz 左右,一般市面所販售儀器中
操作頻率能達到較高頻的有Signal Recovery Model 7280 (0.5 Hz 至 2 MHz)以及 Stanford Research System SR844 (25 kHz 至 200 MHz)兩款。 因此,基於上述的研究背景,讓我們想要去瞭解在內含殘留應力之平板或薄膜結構 的光聲光熱效應,希望能夠藉由建立理論模型並且配合數值模擬,探討殘留應力對光聲 光熱效應的影響以供後續實驗建立上的參考。在理論模型建立上,我們可假設一個強度 經過週期性調制的照射光束(雷射),照射在一個內含殘留應力之平板或薄膜層狀結構的 表面上,於表面上提供一個週期性的熱源使結構發生熱彈性變形,其中熱源能量假設為 一個Gauss 分佈,幾何配置如圖1.3(a)所示。接著,考慮表面上距離熱源中心某單位長 度之位置視為一個訊號接收源,然而,此一位置的訊號接收在一般實驗上是使用雷射光 學干涉技術作量測。而本文則是基於此一模型架構下,藉由改變訊號接收處至熱源間的 距離 r 以及波傳方向與X 軸的夾角1 ,如圖1.3(b)所示,數值模擬獲得此一質點位置 的頻率響應(frequency response)或暫態波形(transient waveform),分析在近場(near-field) 與遠場(far-field)的模擬結果,以助於未來在平板或薄膜結構中殘留應力的分析與鑑定, 包括相位、衰減、非等向特性等。此外,誠如前面所介紹的,試件表面經雷射加熱膨脹 所造成的熱彈聲波,會因熱彈耦合理論中額外熱傳導方程式的阻尼效應,使波在傳遞過 程中皆有能量損失或耗散。



![圖 1.2 珠擊法示意圖及其殘留應力對厚度的分佈圖[4]。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8230424.170886/60.892.210.685.137.640/圖12珠擊法示意圖及其殘留應力對厚度的分佈圖4.webp)