國
立
交
通
大
學
運 輸 科 技 與 管 理 學 系
碩 士 論 文
使 用 車 輛 偵 測 器 和 自 動 車 輛 辨 識 之 資 料
預
測
高
速
公
路
旅
行
時
間
Travel Time Prediction for Freeway Using Vehicle Detector and
Automatic Vehicle Identification Data
研 究 生 : 朱 志 杰
指 導 教 授 : 黃 家 耀 副教授
使用車輛偵測器和自動車輛辨識之資料預測高速公路旅行時間
Travel Time Prediction for Freeway Using Vehicle Detector and
Automatic Vehicle identification Data
研 究 生:朱志杰 Student:
Jhih-Jie Jhu指導教授:黃家耀 Advisor:
Ka-Io Wong國 立 交 通 大 學
運輸科技與管理學系
碩 士 論 文
A Thesis
Submitted to Department of Transportation Technology and Management College of Management
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Transportation Technology and Management
July 2013
使用車輛偵測器和自動車輛辨識之資料
預測高速公路旅行時間
學生:朱志杰 指導教授:黃家耀
國立交通大學運輸科技與管理學系碩士班
摘要
台灣的運輸路網發達,部分時段交通量大造成交通擁塞,如能提供準確的 交通資訊給用路人,或能幫助用路人避開擁塞時間及路段,也能降低路段的擁 塞程度。高速公路上最重要的交通資訊為旅行時間,本研究的目的是利用國道 高速公路的車輛偵測器(Vehicle Detector, VD)及自動車輛辨識(Automatic Vehicle Identification, AVI )作為資料來源,建立旅行時間的預測模型。使用VD具有即時 集交通狀況的特性,透過模式辨認(Pattern Recognition)的方法與VD旅行時間歷 史資料庫比對,找出最相符的日期與時間點,再以相對應的AVI旅行時間歷史資 料進行預測。本研究使用模式辨認中的k-NN(k-Nearest Neighbor)法進行交通狀 況的比對。為了增加比對的準確性,本研究在k-NN模式中將比對時間長度( )列 為校估參數並且對k設定條件限制。將比對時間長度列為參數,可找出更適合路 段的比對時間長度,來提升預測準確性。在偵測器不穩定時,所集的交通資訊 與現實交通狀況不符合,因此對k限制同一天比對成功的筆數限制,可以避免過 多的資訊來自同一天,減少偵測器不穩定所造成的誤差。最後以實際案例探討, 探討加入AVI資料是改善預測準確性的情況。 關鍵詞:旅行時間預測、高速公路、k-NN、車輛偵測器、自動車輛辨識系統Travel Time Prediction for Freeway Using
Vehicle Detectorand Automatic Vehicle identification Data
student:Jhih-Jie Jhu Advisor:Ka-Io Wong
Department of Transportation Technology and Management
National Chung Tung University
ABSTRACT
Accurate traffic information can help road users to avoid traffic
congestion and reduce delay. The objective of this study is to develop a
travel time prediction model for freeway using data from Vehicle
Detector (VD) and Automatic Vehicle Identification (AVI). VD data can
be collected and used in forecasting real-time, but usually suffers from
inaccuracy when the traffic is congested. On the other hand, accurate
travel time information can be derived from AVI data, but the collection
AVI data and license plate matching have a delay and cannot be used in
real-time prediction. We combine the two data sources and establish a
historical database. With pattern recognition technique, we can identify
the most similar traffic pattern in the database using real-time VD data
for prediction. Based on the k-nearest neighborhood (k-NN) method, an
modified approach is proposed with additional model parameters. The
results show that the prediction model with combined VD and AVI
database is more accurate than the model with only VD data.
Keywords: Travel time prediction, freeway, k-NN, Vehicle Detector,
誌謝
轉眼間碩士的兩年生活即將落幕,論文也順利的完成,非常感謝
在研究過程中曾經指導與幫助過我的人。最感謝的當然就是指導教
授 黃家耀老師,感謝老師兩年來細心且耐心的教導,想當初剛進來
交大運管系的時候,連一封e-mail都打不好,還常常被老師耐心地提
醒。從老師身上除了學到專業知識,更重要的是學到了許多做人處
事的道理,由於老師對於做事的專業及態度要求,讓我在面對問題
的時候,能以更聰明、仔細的方式去處理。另外也相當感謝兩位口
試委員 王晉元老師、黃明居老師,非常仔細的看完論文,針對研究
內容以及論文撰寫邏輯上給予相當多的意見,讓我的研究能夠更加
的完善。最後感謝系上所有老師的教導,讓我在這個領域上有了更
深的一層認識。
KI實驗室的同學,相當感謝你們兩年來的照顧,讓我的碩士生活
更加精采,一起出遊、熬夜、打混等等,都是難忘的回憶。我的私
人問題算起來是實驗室中最多的,總是麻煩你們了,非常謝謝你們,
特別感謝小傑、小C在我失去戀人時給予的鼓勵,讓我能很快地走出
來。另外也要感謝我身邊高中時代的好朋友群,大家總是會互相照
應,在低潮的時候互相拉拔,快樂時一起分享,雖然嘴巴都蠻賤的,
還是很感謝你們。當然也不能忘記妳在碩士生活中的陪伴。
最後要感謝的對象就是我的父母,從小到大對我的關心及照顧,
讓我能夠有今天。論文快完成時有點心浮氣躁,口氣可能比較差,
對此感到非常抱歉。
完成了人生中的一個階段,接著要邁向另一個里程碑,回首過去
的兩年生活,依然感到非常充實,再次感謝所有的老師、長輩、朋
友們的照顧。
朱志杰
2013年 7月
新竹 交大
目錄
摘要... i ABSTRACT ... ii 誌謝... iii 目錄... v 圖目錄... vii 表目錄... ix 第一章 緒論... 1 1.1 研究背景與動機... 1 1.2 研究目的... 2 1.3 研究範圍與方法... 2 1.4 研究流程... 3 第二章 文獻回顧... 5 2.1 交通預測方法... 5 2.2 旅行時間推估... 6 2.2.1 AVI 與 ETC 資料應用於旅行時間推估 ... 6 2.2.2 VD 資料應用於旅行時間推估 ... 7 2.3 旅行時間預測模式... 8 2.3.1 k-NN 法 ... 9 2.3.2 回歸模式... 11 2.3.3 類神經網路... 11 2.3.4 卡門濾波法... 11 2.4 小結... 12 第三章 資料分析... 13 3.1 AVI 資料分析 ... 14 3.1.1 AVI 設備資訊 ... 15 3.1.2 異常旅行時間樣本過濾... 16 3.1.3 車種差異分析... 17 3.1.4 AVI 辨識率 ... 18 3.1.5 AVI 旅行時間樣本數 ... 24 3.1.6 AVI 資料分析結論 ... 29 3.2 VD 資料分析 ... 29 第四章 旅行時間推估模式... 314.3 VD 旅行時間推估模式 ... 41 4.4 小結... 42 第五章 旅行時間預測模式... 43 5.1 預測模型... 44 5.1.1 VD k-NN 模型 ... 44 5.1.2 VD 及 AVI 旅行時間融合 ... 48 5.2 旅行時間延遲加總... 49 第六章 實例分析... 51 6.1 預測地點及特性... 51 6.2 參數校估... 51 6.2.1 參數校估方法... 52 6.2.2 參數校估結果... 52 6.2.3 小結... 54 6.3 預測案例... 54 6.4 小結... 80 第七章 結論與建議... 81 7.1 結論... 81 7.2 建議... 82 文獻參考... 83 附錄... 85
圖目錄
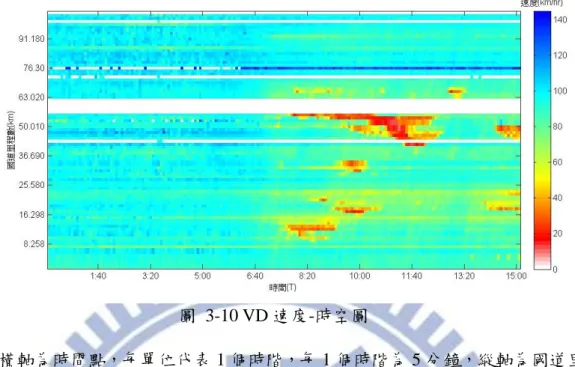
圖 1-1 VD 尖峰時段旅行時間低估案例 ... 2 圖 1-2 研究流程圖 ... 4 圖 2-1 交通預測分析骨幹 ... 5 圖 2-2 旅行時間蒐集示意圖 ... 7 圖 2-3 模式辨認 ... 9 圖 3-1 旅行時間原始分佈 ... 16 圖 3-2 旅行時間標準差過濾法 ... 17 圖 3-3 北上-大小車旅行時間差異 ... 18 圖 3-4 南下-大小車旅行時間差異 ... 18 圖 3-5 VD 車流量與 AVI 辨識量 ... 19 圖 3-11 AVI 抽樣數與樣本數需求(E=0.05) ... 26 圖 3-12 AVI 抽樣數與樣本數需求(E=0.1) ... 26 圖 3-13 AVI 抽樣數與樣本數需求(E=0.2) ... 27 圖 3-14 VD 速度-時空圖 ... 30 圖 4-1 AVI 旅行時間歷史資料填補流程 ... 33 圖 4-2 AVI 方案二旅行時間插補概念 ... 33 圖 4-3 速度-時空圖 ... 41 圖 5-1 預測模式流程 ... 43 圖 5-2 T1、T2差異示意圖 ... 44 圖 5-3 旅行時間預測流程圖 ... 46 圖 5-4 k-NN 擴大比對時間差異 ... 48 圖 5-5 VD 填補 AVI 旅行時間歷史資料庫概念 ... 49 圖 5-6 延遲概念示意圖 ... 49 圖 6-1 新竹-台北參數校估與預測誤差變化 ... 52 圖 6-2 新竹-台北,七月二十七日歷史旅行時間 ... 56 圖 6-3 新竹-台北,七月二十七日預測旅行時間 ... 56 圖 6-4 新竹-台北,七月二十七日 85%絕對百分誤差... 57 圖 6-5 新竹-台北,六月十五日歷史旅行時間 ... 58 圖 6-6 新竹-台北,六月十五日預測旅行時間 ... 58 圖 6-7 新竹-台北,六月十五日 85%絕對百分誤差... 59 圖 6-8 台北-新竹,六月二十九日歷史旅行時間 ... 60 圖 6-9 台北-新竹,六月二十九日預測旅行時間 ... 60圖 6-12 台北-新竹,七月二十日預測旅行時間 ... 62 圖 6-13 台北-新竹,七月二十日 85%絕對百分誤差... 63 圖 6-14 新竹-台北,七月十三日歷史旅行時間 ... 64 圖 6-15 新竹-台北,七月十三日預測旅行時間 ... 64 圖 6-16 新竹-台北,七月十三日 85%絕對百分誤差... 65 圖 6-17 台北-新竹,七月二十七日歷史旅行時間 ... 66 圖 6-18 台北-新竹,七月二十七日預測旅行時間 ... 66 圖 6-19 台北-新竹,七月二十七日 85%絕對百分誤差... 67 圖 6-20 台北-新竹,七月十三日歷史旅行時間 ... 68 圖 6-21 台北-新竹,七月十三日預測旅行時間 ... 68 圖 6-22 台北-新竹,七月十三日 85%絕對百分誤差... 69 圖 6-23 台北-新竹,七月二十日歷史旅行時間 ... 70 圖 6-24 台北-新竹,七月二十日預測旅行時間 ... 70 圖 6-25 台北-新竹,七月二十日 85%絕對百分誤差... 71 圖 6-26 新竹-台中,七月十三日歷史旅行時間 ... 72 圖 6-27 新竹-台中,七月十三日預測旅行時間 ... 72 圖 6-28 新竹-台中,七月十三日 85%絕對百分誤差... 73 圖 6-29 新竹-台中,七月二十日歷史旅行時間 ... 74 圖 6-30 新竹-台中,七月二十日預測旅行時間 ... 74 圖 6-31 新竹-台中,七月二十日 85%絕對百分誤差... 75 圖 6-32 台中-新竹,七月十三日歷史旅行時間 ... 76 圖 6-33 台中-新竹,七月十三日預測旅行時間 ... 76 圖 6-34 台中-新竹,七月十三日 85%絕對百分誤差... 77 圖 6-35 台中-新竹,七月二十日歷史旅行時間 ... 78 圖 6-36 台中-新竹,七月二十日預測旅行時間 ... 78 圖 6-37 台中-新竹,七月二十日 85%絕對百分誤差... 79
表目錄
表 3-1 交流道里程 ... 13 表 3-2 旅行時間預測範圍對照表 ... 14 表 3-3 國道 AVI 位置及自定編號 ... 15 表 3-4 AVI 資料格式 ... 15 表 3-5 國道北上路段 AVI 辨識率(小客車,1 月 6 日) ... 20 表 3-6 國道北上路段 AVI 辨識率(所有車種,1 月 6 日) ... 20 表 3-7 國道南下路段 AVI 辨識率(小客車,1 月 6 日) ... 21 表 3-8 國道南下路段 AVI 辨識率(所有車種,1 月 6 日) ... 22 表 3-9 不同情況下樣本數足夠之比例 ... 28 表 4-1 名詞定義 ... 31 表 4-2 旅行時間資料缺失率-北上路段 ... 35 表 4-3 旅行時間時階最大連續缺失數-北上路段 ... 35 表 4-4 旅行時間插補方案-北上路段 ... 36 表 4-5 旅行時間資料缺失率-南下路段 ... 37 表 4-6 旅行時間時階最大連續缺失數-南下路段 ... 38 表 4-7 旅行時間插補方案-南下路段 ... 39 表 5-1 延遲加總邏輯 ... 50 表 6-1 預測範圍資訊 ... 51 表 6-2 VD+AVI 各路段使用參數對照 ... 53 表 6-3 VD 各路段使用參數對照 ... 53 表 6-4 台北-新竹參數校估結果(7 月 20 日) ... 53 表 6-5 新竹-台北參數校估結果(7 月 27 日) ... 53 表 6-6 新竹-台中參數校估結果(7 月 13 日) ... 54 表 6-7 台中-新竹參數校估結果(7 月 13 日) ... 54 表 6-8 預測範例情境分類 ... 55 表 6-9 新竹-台北,七月二十七日旅行時間預測結果分析 ... 57 表 6-10 新竹-台北,六月十五日旅行時間預測結果分析 ... 59 表 6-11 台北-新竹,六月二十九日旅行時間預測結果分析 ... 61 表 6-12 台北-新竹,七月二十日旅行時間預測結果分析 ... 63 表 6-13 新竹-台北,七月十三日旅行時間預測結果分析 ... 65 表 6-14 台北-新竹,七月二十七日旅行時間預測結果分析 ... 67 表 6-15 台北-新竹,七月十三日旅行時間預測結果分析 ... 69表 6-18 新竹-台中,七月二十日旅行時間預測結果分析 ... 75
表 6-19 台中-新竹,七月十三日旅行時間預測結果分析 ... 77
表 6-20 台中-新竹,七月二十日旅行時間預測結果分析 ... 79
第一章 緒論
1.1 研究背景與動機
台灣西部交通公路系統已布置相當嚴密,用路人可依需求選擇國道高速公路 或者平面替代道路,行走最合適的路線。在忙碌的現實社會中,時間就是金錢, 時間的管理儼然成為一門重要的課題,若要將交通運具納入時間管理,必須將足 夠的資訊提供給用路人,其中最重要且淺顯易懂的交通資訊,莫過於旅行時間。 以國道高速公路為例,目前較常見之交通資訊系統為警察廣播電台、交通服 務 E 網、Google 地圖等,僅能提供簡單之路況資訊,如有無事故發生、擁塞情 況等以及粗略的旅行時間公告。尚無建立完整的旅行時間預測資訊系統,當用路 人在選擇適合行駛路線時,由於資料不充足,僅能用過去經驗去判斷旅行時間, 當經驗與現實情況不相符,則會造成時間浪費,對個人及國家都是一大損失。 為了滿足用路人需求,可藉由智慧型運輸系統(Intelligent Transportation System, ITS)進行交通管理,提升道路使用效率。其中以先進旅行者資訊系統(Advanced Traveler Information System, ATIS)與先進交通管理系統(Advance Transportation Management Systems, ATMS),與用路人最為相關。ATMS 將交通路網上偵測器 蒐集的資訊,經過分析、計算產生之結果,透過 ATIS 提供用路人即時交通資訊。 而國道上常見的偵測器有車輛偵測器(Vehicle Detector, VD)、自動車輛辨識 (Automatic Vehicle Identification, AVI)、探針車(Floating car)、電子收費(Electronic Toll Collection, ETC) 等種類繁多的交通偵測系統,本研究期望透過現有國道偵 測器,發展出一套旅行時間預測系統,提供給用路人使用。 目前造成台灣國道擁塞的主要原因在於,上下班時間過多的短程使用者,將 國道當作免費且快速的短程公路使用。為解決台灣國道高速公路壅塞問題,台灣 未來將實施國道高速公路里程收費政策,達到使用者付費的公平性原則,屆時國 道高速公路上必定將設置許多類似 ETC 的偵測器。此種偵測器特性為,詳細紀 錄車輛通過收費偵測器的里程數及時間,並且能將高速公路上行駛的所有車輛納 入分析資料來源,此資料相較於其它偵測器資料,有著偵測準確以及資料龐大的 特性,對於交通管理者來說是一大福音。由於計程收費系統尚未設置完成,本研 究僅能使用其它偵測器進行研究,選用資料量較少,偵測模式相似於里程收費偵 測器的 AVI 資料作為研究對象,並且結合其它偵測器資料,如 VD、GVP 等國道 偵測器,補足 AVI 資料無法即時蒐集的缺點,提升旅行時間預測之準確性,期 望能對社會大眾有貢獻。 建置旅行時間預測模式,除了能提升交通管理的效率,改善交通擁塞狀況, 也能提供用路人更為明確用路資訊,使用路人有足夠資訊進行選擇,將時間與資 源做更有效分配與運用。 目前的旅行時間預測研究大多數使用 VD 作為資料來源,但 VD 在尖峰時段 可能會產生旅行時間低估的狀況。AVI 簡介及旅行時間收集方式會在 2.2.1 詳述,時間需要車輛通過兩台偵測器,在台灣無法即時取得,因此 AVI 資料應用於旅 行時間預測,僅能使用在建置歷史資料庫。而預測日的 AVI 旅行時間,事後收 集回來後,則可以當作標竿與預測結果比較。以下為台灣 VD 偵測器的低估實際 案例,圖 1-1 為 2012 年 1 月 27 日,國道一號南下路段 24~36 公里處,使用 AVI 所蒐集之平均旅行時間與使用 VD 推估之旅行時間,可由圖中看出,VD 在尖峰 時段,收集的即時資料出現了旅行時間低估的狀況。因此本研究將建立一旅行時 間預測模式,解決 VD 低估產生旅行時間預測誤差的狀況。 圖 1-1 VD 尖峰時段旅行時間低估案例
1.2 研究目的
本研究目的為建立旅行時間預測模式,解決單純使用 VD 進行旅行時間預測容易 造成低估之問題。因此本研究提出將 VD 與 AVI 資料結合,透過 AVI 蒐集的旅 行時間資料,提昇國道高速公路旅行時間預測的準確性。本研究將蒐集的 AVI 資料建置成 AVI 旅行時間歷史資料庫,結合 VD 具有蒐集即時資料的特性,發展 出新的旅行時間預測模式。1.3 研究範圍與方法
本研究所建立之旅行時間預測模式,所需的 VD 及 AVI 資料,由台灣高速公 路局提供 2012 年 1 月~7 月,星期五的資料,作為研究分析材料。 資料整理後發現高速公路總局所提供之 AVI 資料妥善率以台中以北較佳,台 中以南 180km 至 360km 的 AVI 資料妥善率欠佳,因此本研究所選定的研究範圍 為台中交流道-台北交流道北上及南下方向,作為研究範圍,選定路段可切分為 兩大主題,(1)台中交流道-新竹交流道、新竹交流道-台中交流道,流量穩定、較 少塞車,(2)新竹交流道-台北交流道、台北交流道-新竹交流道,旅行時間有明顯 0 5 10 15 20 25 0:00 3:00 6:00 9:00 12:00 15:00 18:00 旅 行 時 間 (分 ) 時間 AVI旅行時間 VD旅行時間延遲加總尖離峰變化,預測難度較高。
本研究主要方法是,利用國道高速公路總局提供之 AVI 及 VD 資料,建立 AVI 旅行時間歷史資料庫與 VD 旅行時間歷史資料庫。首先藉由 VD 可以即時收 集 速 度 、 流 量 資 料 , 計 算 出 即 時 旅 行 時 間 的 優 點 , 透 過 模 式 辨 認 (Pattern Recognition)中的 k-NN(k-Nearest Neighbor)法,去與 VD 旅行時間歷史資料庫比 對,找出 k 個最為相似的日期與時階,最後以對應日期與時階的 AVI 旅行時間 歷史資料,做為旅行時間預測結果的依據。最後以預測日事後收集回來的 AVI 資料作為真值比較,驗證本研究提出的預測模式。
1.4 研究流程
本研究將前述所提出之旅行時間預測之研究範圍與方法,擬訂可行之研究流 程,研究流程及研究流程圖如下圖 1-2 所示: 1. 決定研究範圍與對象 選定在尖離峰時段壅塞變化明顯,造成旅行時間有明顯變化之路段,作為第 一種預測對象,本研究選定國道一號北上方向新竹-台北、南下方向台北-新 竹,第二種預測對象為流量穩定且較少塞車的路段,本研究選定國道一號北 上方向台中-新竹、南下方向新竹-台中。 2. 蒐集相關文獻 蒐集各種偵測器應用旅行時間推估模式、資料過濾與插補方法、模式辨認等 相關文獻。 3. 資料蒐集與過濾 將蒐集之偵測器數據加以過濾、填補,使得資料完整,可提供旅行時間推估 及預測使用。 4. 建置 VD、AVI 旅行時間歷史資料庫 5. 建立 VD k-NN 模式 6. 預測結果分析 7. 結論與建議研究對象與範圍 VD k-NN預測模式 預測結果參數(日 期、時階) 結論與建議 相關文獻回顧 資料蒐集與過濾 VD旅行時間歷史資 料庫建置 AVI旅行時間歷史 資料庫建置 對應結果參數的 AVI歷史旅行時間 資料 預測結果分析 圖 1-2 研究流程圖
第二章 文獻回顧
2.1 交通預測方法
根據 Vlahogianni (2004)所提出的論文,將普遍接受的交通相關預測文獻,進 行文獻的重點整理,並且將文獻中所提及的預測方法與過程做一個分類,歸類出 做一個交通預測之前所需要考慮的前提條件,如選擇的道路總類、預測的有效時 間範圍、使用的交通參數等等,完整的一個交通預測所需要做的準備如下圖 2-1 所 示 : 研究範圍 應用區域 應用型態 快速公路 市區道路 高速公路 ATMS ATIS 輸出概念 決定數據 交通參數 預測時使用的時間範圍 預測的時間範圍 流量/佔有率/速度 旅行時間 其它 單一或者多種參數 預測模型 方法 輸出資料型態 輸入資料型態 資料品質 母數 無母數 混和 多變量 持續預測 多種參數輸入 時間與空間關係 設計參數 模型參數 圖 2-1 交通預測分析骨幹 資料來源:(Vlahogianni, 2004) 文章中提到,做一個交通預測主要有三大步驟,(1)首先必須要界定研究的 範圍,也就是研究的區域屬性以及應用的型態。區域屬性主要分成快速公路、高明確的決定研究結果要達成甚麼目標,也就是輸出概念。輸出概念則可分為數據 分辨率及交通參數兩小類,數據分辨率指的是,決定使用多長的時間區間資料, 去預測未來多長的時間區間資料,比如說使用蒐集到的 5 分鐘資料去預測未來 15 分鐘的交通狀況。交通的預測不是只有單一的種類,預測的種類可能為流量、 佔有率、速度、旅行時間等等,必須在此先做好決定才能進行模型的設計。前兩 步驟是一個明確定義、設計一個交通預測研究的必經過程,畢竟沒有對研究的對 象進行特性的了解,將難以建置一個有效的模型去描述未來交通狀況。(3)第三 步驟則開始進行模型的設計,選擇一個適合的方法才能達到理想的預測效果,文 章中主要將方法分為三大種類,其一是使用統計上的方式如回歸、指數平滑、 ARMA、卡門濾波等方式,其二是使用無母數的方法如無母數回歸、類神經等方 法,或者是將前兩種方式做結合的混和方法來建置模型。當然建置一個模型還是 得考慮輸入及輸出的資料以等變數,輸出的資料類型也會影響模型的選擇,如輸 出的資料類型屬於多變量,方法則偏向無母數的方法。模型輸出的資料特性還須 具備持續預測的能力,指的是模型不能只適用於特定的單一時間區間預測,必須 要能在所有時間皆能使用,才是一個完整的交通預測模型。輸入的變數種類也會 影響模型的選擇,文章中主要將輸入變數分成兩大類,分別是使用多種交通參數 或者使用時空關係資料。最後影響模型的設計即是資料品質,文章中所指的資料 品質是,蒐集來的數據常出現異常、遺漏等等狀況,要在可能的情況下進行過濾 或者填補才能使用,否則再好的模型也無法進行準確的預測。 藉由此文章的整理,可以清楚地了解的,要完成一個交通預測,要如何循序 漸進地完成,並列出需要考慮去注意的條件,對於本研究要進行旅行時間的預測, 有著相當的幫助。
2.2
旅行時間推估
2.2.1 AVI 與 ETC 資料應用於旅行時間推估
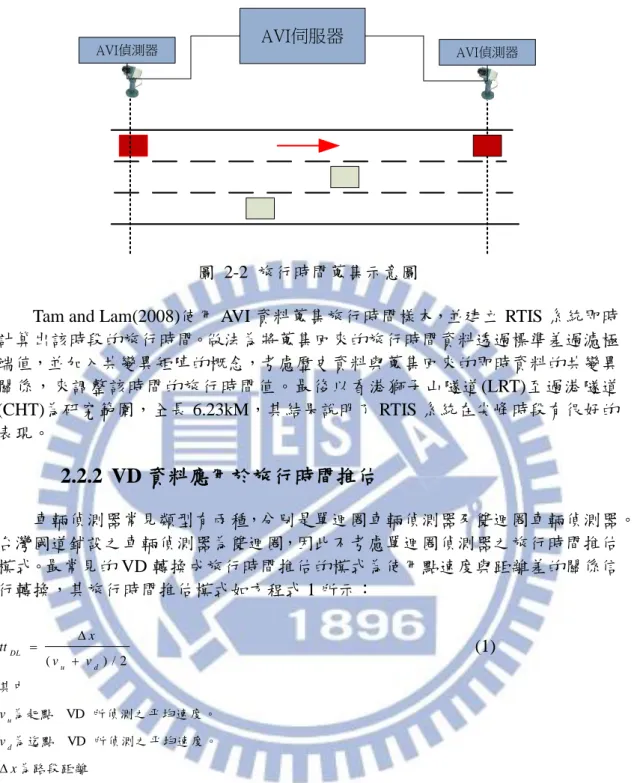
自動車輛辨識簡稱AVI(Automatic Vehicle Identification),意旨不需人工,當 車輛經過時能夠自動辨識車輛身分的技術。車輛本身需要有能代表唯一身分的符 號、標誌等,而車輛之身分通常為車牌、車主、車籍資料等。目前除了上述代表 身分外,尚有額外加裝之電子產品能代表身分,如條碼(Bar Code)、電子車牌 (Electronic Number Plate)、電子識別卡(Tag)、智慧卡(Smart Card)等、再依據不同 需要蒐集AVI資料。目前AVI常使用於道路計程收費、電子收費、公路交通管理 等方面。 Sano et al.(2000)等人透過,AVI偵測器的特性,可以發展出蒐集旅行時間的 方式,蒐集方式如下圖2-2所示。偵測器設置於道路兩端,當具有身分之車輛經 過偵測器,將車輛通過之時間紀錄,並傳回伺服器端進行儲存,車輛通過兩偵測 器之時間差,即為旅行時間。
AVI伺服器
AVI偵測器 AVI偵測器
圖 2-2 旅行時間蒐集示意圖
Tam and Lam(2008)使用 AVI 資料蒐集旅行時間樣本,並建立 RTIS 系統即時 計算出該時段的旅行時間。做法為將蒐集回來的旅行時間資料透過標準差過濾極 端值,並加入共變異矩陣的概念,考慮歷史資料與蒐集回來的即時資料的共變異 關係,來調整該時間的旅行時間值。最後以香港獅子山隧道(LRT)至過港隧道 (CHT)為研究範圍,全長 6.23kM,其結果說明了 RTIS 系統在尖峰時段有很好的 表現。
2.2.2
VD 資料應用於旅行時間推估
車輛偵測器常見類型有兩種,分別是單迴圈車輛偵測器及雙迴圈車輛偵測器。 台灣國道鋪設之車輛偵測器為雙迴圈,因此不考慮單迴圈偵測器之旅行時間推估 模式。最常見的 VD 轉換成旅行時間推估的模式為使用點速度與距離差的關係信 行轉換,其旅行時間推估模式如方程式 1 所示: 2 / ) ( u d DL v v x tt (1) 為路段距離 所偵測之平均速度。 為迄點 所偵測之平均速度。 為起點 其中 x v v d u VD VD 此模式為最簡單的 VD 旅行時間轉換模型,但單純使用起訖點平均點速度所 計算出來的旅行時間,在車流量較高的時段則容易造成旅行時間低估的狀況。 根據 Oh et al. (2002)研究,文獻中指出直接利用平均點速度推算出旅行時間, 在尖峰時段與 GVP 實地蒐集之數據產生誤差至少有 20%以上。為避免造成旅行 時間低估的狀況發生,提出使用流量守恆以及考慮兩偵測器間之密度,模式中也 將匝道影響列入考慮變數中。研究過程針對 VD 與 VD 間存在測量誤差,提出調 整參數α 修正偵測器間的誤差,以達到流量守恆。並且與上述 3 種標竿推估模式從 k=q*v 與流量守恆的關係中推導出旅行時間的關係式如方程式 2 所示: 2 / ) ( ) ( ( ) ( ) 1 ( t q t q t k t k x tt d u DL (2) 路段密度 為時間 為路段距離 所偵測之流量。 為迄點 所偵測之流量。 為起點 其中 t t k x q q d u ) ( VD VD 當時間改變成(t+1)時,路段中密度的改變則可由流量守恆中推得,並將匝道 進出口列入流量守恆方程式中考慮,如方程式 3 所示 )}] ( ) ( { )} ( ) ( ][{ [ ) ( ) 1 ( l q t l q t l q t l q t x l t t k t k u on on d off off (3) 為流量 為匝道出口 為匝道入口 為迄點 為起點 為車道數 其中 q off on d u l 此模型使用的概念為流量守恆與密度的關係,推導出旅行時間推估的模型, 意味著 VD 所偵測的流量資料必須相當準確,才能維持流量守恆的原則,如 VD 所偵測的資料出現異常,則此模式無法使用。 由羅峻庭 et al. (2012),針對台灣國道高速公路旅行時間推估之研究分析, 使用 Oh et al. (2002)所提出的模型,其分析結果顯示,台灣國道高速公路佈設的 VD 不適合使用流量守恆及密度的方式去計算旅行時間。原因在於台灣國道高速 公路上佈設的 VD 時常出現儀器上的故障,導致速度及流量資料遺失,即使在無 故障的路段間,起訖點 VD 所偵測到的流量變化差距過大,難以使用 α 參數進行 些微差異的修正,並不符合流量守恆原則,因此使用流量及密度關係去推估旅行 時間的模型,不適合在台灣國道公速公路上使用。
2.3
旅行時間預測模式
所謂的交通預測,指的是能蒐集即時的交通資訊,並且預測未來的交通狀況。 而常見的交通預測方式為鑑往知來,也就是蒐集即時交通資訊,並透過歷史資料 所提供的交通資訊進行預測,從眾多歷史資料中尋找特徵最相似的。這種透過蒐 集即時資訊的特徵,去尋找歷史資料中特徵最為相似的方式稱之為模式辨認 (Pattern Recognition),張智星將模式辨認方法歸類出以下 6 種,如下圖 2-3 所示:Pattern Recognition (樣式辨認) K-NN (nearest neighbor) 貝氏分類器 Learning Vector Quantization (學習式向量量化) Naïve Bayes Classifiers (單純貝式分類器 Quadratic classifiers (二次分類器) Linear Classifiers (線性分類器) 圖 2-3 模式辨認
2.3.1
k-NN 法
k-NN 用於交通預測上,其原理是透過歷史資料與即時資料的比較,找出最 相近 k 筆歷史資料,進行交通預測的一種方法,比較的資料通常以日期、星期別 等方式分群比較,因此歷史資料的周延性以及準確性,則是影響 k-NN 方法預測 準確性的一大因素。 Altman (1992)評估 k-NN 應用於交通流量預測的績效,其結果說明交通狀況 是一個典型的隨機且非混亂的狀態,與季節 ARIMA 模型進行比較,結果顯示 k-NN 法應用於交通流量預測上,在有足夠大的歷史資料庫情況下,結果會比季 節 ARIMA 模型來的好。Smith and Demetsky (1997),比較 4 種模型進行交通流量預測,歷史平均、 ARIMA、BP 類神經網路(Back-Propagation)、k-NN,並將 4 種模型的優缺點列出 來,歷史平均有個方便使用、快速的優點,但是無法應變突發狀況。AMRMA 的優點為使用時間序列技術,但在處理資料遺失的能力稍嫌不足。BP 類神經網 路則能應用於各種複雜且非線性的環境中,訓練過程也相對較為複雜。k-NN 法 在操作中則無須假設變數之間的關係,但也需要定是比較對象。4 種模型使用平 均誤差進行比較,結果顯示 k-NN 的結果優於其它三者。 Clark (2003),將 k-NN 法擴展為多元比較,使用流量、速度、佔有率等 3 個 交通變數進行交通預測,並給予相對應的權重,其預測的流量、速度、佔有率分 別以 MPAE 及 RMSE 進行比較,實際結果顯示,使用多元交通變數去預測交通
Lam et al. (2006)將每年香港的交通流量統計報表進行分析(ATC),使用 4 種 方法進行交通預測,分別是 ARIMA、類神經網路、k-NN、GML(Gaussian Maximum Likelihood),結果顯示屬於無母數模型的 k-NN 及 GML 的預測結果比其他兩種 來的好。GML 應用在預測在長時間且具有穩定周期變化的交通流量,結果來的 比 k-NN 預測結果佳,但若是短時間的預測,則 k-NN 預測結果來的比 GML 模 式好,因此短時間的交通流量預測建議使用 k-NN 模式。 Chang et al. (2006)將旅行時間預測分為兩階段,旅行時間推估與旅行時間預 測。使用偵測器及 LED 看版,蒐集美國馬里蘭快速道路資料,在旅行時間推估 階段中,推估模式主要將即時蒐集回來的偵測器歷史資訊與即時資訊進行轉換, 計算出旅行時間。當旅行時間計算完成,採用 k-NN,找出即時與歷史旅行時間 中誤差最小之 k 筆,經過平均或者加權平均後即為旅行時間預測值。若找不足 k 筆則使用增強係數模式(Enhanced Time-Varying Coefficient Model)進行交通預測。 交通路況在短行時間除非有突發狀況,否則難以有劇烈變化,因此當交通現況與 過去歷史交通狀況相似時,旅行時間也不會有太大變化,應用於旅行時間預測能 產生不錯的效果。 陳建旻(2009)採用探針車資料,並用 k-NN 法進行國道一號南下路段泰山-楊 梅收費站旅行時間預測,與時變係數模式(TVC)進行比較。採用變化 k 值,有別 於其它研究大多數使用固定 k 值解,能增加對於預測的應變能力,不會選取過多 或者過少的 k 值,其研究結果顯示,k-NN 法用於高速公路旅行時間預測在尖峰 時段比 TVC 模式來的準確,以 MAPE 來看 k-NN 預測結果為 3.4%,TVC 預測 結果為 6.6%。使用 k-NN 法在旅行時間預測上,有著相當不錯的成果。 蔡繼光(2009)使用 VD 資料進行旅行時間預測,其 k-NN 模型考慮較長時間 的交通變化,同時比較多個時階與歷史旅行時間的誤差,當誤差小於接受門檻值, 才列入旅行時間預測結果,分別以短距離龍潭收費站到樹林收費站以及長距離龍 潭收費站到後龍收費站做預測範圍,結果顯示短距離旅行時間誤差約 6.5%,長 距離旅行時間誤差約 7.1%,結果顯示,擴大比對範圍能較低旅行時間預測誤差。 王晉元(2011)利用 VD 蒐集的速度資料,推估出台灣台北-高雄的中長程旅行 時間推估資料,並建立旅行時間歷史資料庫。其一做法為以 GVP 及 ETC 資料優 先使用,計算車輛實際行使所需花費之時間,接著在無 GVP 及 ETC 資料之路段 採用兩兩 VD 間速度資料將其轉換成旅行時間。利用上述方法建立國道台北至高 雄的旅行時間歷史資料庫建立。旅行時間預測的部分則是當即時資料經由 ATMS 蒐集至伺服器端,利用 k-NN 進行比對,找出與歷史資料中最相符之資料,作為 預測之旅行時間。 綜合以上結果,k-NN 應用於交通預測上,當有足夠多的歷史資料與使用多 元的交通變數進行比對,有相當不錯的成績,能有效的提升交通預測上的準確 性。
2.3.2
回歸模式
透過兩個以上變數關係,去建立一個回歸模式,原理是以一個或多個作為自 變數,透過自變數與應變數的關係,去預測應變數的一個方式,其模型可分為一 個自變數與一個應變數的簡單回歸以及多個自變數與一個應變數的複回歸。
Wu et al. (2004)使用支持向量回歸(support vector regression ,SVR),藉由 VD 資料進行高速公路旅行時間預測,藉由支持向量機器對於給定的訓練,能有相當 好的概念化能力,因此 SVR 很適合使用在時間序列分析上,選擇台北-中壢、台 北-台中、台北-高雄等路段進行分析,與當前旅行時間預測(Current-time Predictor) 及歷史平均旅行時間預測(Historcial-mean predictor)進行比較,比較結果 RME 及 RMSE 都優於其他兩者。
張慶麟 (2003)使用模擬資料產生 AVI 數據,以 AVI 數據考慮高速公路車流。 並建構簡單指數平滑法(single Exponential smoothing , SES),Holt’s 指數平滑法 (Holt’s Exponential smoothing , HSES) , 自 我 迴 歸 移 動 平 均 整 合 模 式 (Auto-Regressive Integrated Moving Average , ARIMA) , 及 倒 傳 遞 網 路 (Back-Propagation Network ,BPN)等 4 種旅行時間預測模式。以模擬資料測試最佳 佈設 AVI 距離為 1 公里或 2.5 公里,在輸出時距 1 分鐘 AVI 辨識率須至少大於 30%,在輸出時距 3 分鐘 AVI 辨識率須至少大於 10%,在輸出時距 5 分鐘 AVI 辨識率則對預測較無影響。
2.3.3
類神經網路
Chen et al. (2009)提出 TP-HPSL 的類型經網路方法,使用開放式資料,例如 可分享定位資料的旅行者智慧型手機,沒有固定的路段區間,能將旅行時間預測 應用在無偵測器的路段,並與 SSNR(State Space Neutral Networks)、SVR、當前 旅行時間預測進行比較,得到了不錯的結果。 李穎(2002)以總體資料考量模式將各種資料來源做結合。運用類神經網路與 真實行車資料來進行旅行時間預測,針對西螺至永康間 36 個區間進行旅行時間 預測 61%的旅行時間預測 MAPE 值皆小於 12%,86%的旅行時間預測 MAPE 值 小 20%。2.3.4
卡門濾波法
Chien and Kuchipudi (2003)使用卡門濾波法進行旅行時間預測,利用卡門濾 波能夠持續的更新觀測變量的特性進行旅行時間預測,使用 RST(road side terminals)進行數據蒐集,並比較了使用歷史路徑旅行時間與路段旅行時間進行預 測的好壞,其結果顯示,當有足夠的樣本及旅行時間變異較小時,尖峰時段使用 路徑旅行時間的結果較使用路段旅行時間進行預測的結果來的好。
2.4
小結
經由本研究對於各種交通方法的探討後,發現屬於無母數方法應用在交通預 測上有著不錯的成果,其中 k-NN 法對於區分短時間內的交通預測,有著相當不 錯的成果,因此本研究選用 k-NN 模型進行研究,透過輸入旅行時間變數以及擴 大搜尋範圍,結合 AVI 資料進行預測,提升應用旅行時間於預測的準確性。面 對未來即將上路的里程收費,可蒐集的歷史資料量大幅度提升,更適用於資料庫 越大準確性越高的 k-NN 模型。第三章 資料分析
本研究的資料來源為台灣國道高速公路總局所提供的 VD 及 AVI 數據,屬於 沒有經過校正的原始資料,尚未透過分析、過濾、轉換等步驟,無法做為旅行時 間歷史資料使用。因此本研究針對 VD 及 AVI 數據先進行分析,了解其資料特 性、優點、缺點等等資訊,最後資料依照分析結果,建置成旅行時間歷史資料庫, 提供給預測模型進行比對。 本研究使用的資料時間為 2012 年 1 月至 7 月 VD 及 AVI 資料,星期五,研 究範圍為台北交流道-台中交流道。星期五的旅行時間除了一般的早晨尖峰,傍 晚的尖峰除了下班車潮,亦包含了返鄉車潮,因此選擇星期五進行研究,可同時 分析本研究在一般狀況及特殊狀況下的預測表現。下表 3 -1 為研究範圍內的交流 道及里程數對照表。 表 3-1 交流道里程 資料來源:交通部台灣區國道高速公路局網站 國道 1 號交流道里程名稱表 交流道名稱 中心里程 交流道名稱 中心里程 汐止交流道 10 幼獅交流道 67 汐止系統 11 楊梅交流道 69 汐止端 12 楊梅端 70 東湖交流道 15 湖口交流道 83 內湖交流道 16 竹北交流道 91 圓山交流道 23 新竹交流道 95 台北交流道 25 新竹系統 99 三重交流道 27 頭份交流道 110 五股交流道 33 苗栗交流道 132 林口交流道 41 銅鑼交流道 140 桃園交流道 49 三義交流道 150 機場系統 52 后里交流道 160 內壢交流道 57 台中系統 165 中壢轉接道 59 豐原交流道 168 中壢交流道 62 大雅交流道 174 平鎮系統 65 台中交流道 178旅行時間預測範圍為台北-台中,將預測路段切分為兩段,其一為台中至新 竹,其二為新竹至台北。兩條預測路段特性皆不相同,台中至新竹尖離峰變化不 明顯,預測此路段可評估本研究模式對於平穩路段之績效。而新竹至台北尖離峰 變化較大,上下班車潮明顯,週末晚間更是有返鄉車潮的出現,車流變化劇烈, 對於旅行時間預測變數甚多,實為一大挑戰,也是本研究之研究主題。研究範圍 如下表 3-2 所示,明確的界定預測範圍及預測距離,並且在本章節針對範圍內所 蒐集的 VD 及 AVI 資料進行分析。 表 3-2 旅行時間預測範圍對照表 研究範圍 編號 方向 起點 里程數 迄點 里程數 預測距離 1 南下 台北交流道 24km 新竹交流道 98km 74km 2 北上 新竹交流道 100km 台北交流道 23km 77km 3 南下 新竹交流道 98km 台中交流道 177km 79km 4 北上 台中交流道 179km 新竹交流道 100km 79km
3.1
AVI 資料分析
AVI 蒐集的資料為車輛通過時間,因此轉成旅行時間不需經過複雜的模式轉 換,準確度也較高,適合用於旅行時間推估。但有許多因素造成旅行時間推估之 誤差,如以下六項: (1) AVI 辨識的車牌為隨機抽樣,並非固定路線的探針車,因此車輛不一定按照 路線行駛於國道,駕駛人可能暫時離開國道,造成旅行時間較長。 (2) 車牌為隨機辨識情況下,蒐集的車輛樣本目的地未知,距離過長可能導致旅 行時間樣本數的不足。 (3) 若時階內蒐集的旅行時間樣本數不足,則無法有效的代表該時階的平均旅行 時間。 (4) 台灣國道 AVI 使用影線辨識,容易光線或者天氣等等因素影響,造成辨識 錯誤或者無法辨識等情況。 (5) 儀器維護、故障等等狀況,導致資料暫時性沒有正常蒐集。 (6) 研究對象主要針對小客車,大型車輛與小客車有性能、駕駛行為上的差異, 旅行時間可能不相同,因此必須先進行大型車輛與小客車旅行時間差異分析, 決定是否要將大型車輛資料剃除。 基於以上理由,AVI 資料用在平均旅行時間蒐集,雖然是一個相當好的資料 來源,但在使用 AVI 進行旅行時間推估前,必須先將 AVI 資料進行分析,評估 其可行性,方可將 AVI 應用於旅行時間歷史資料庫的建立。3.1.1 AVI 設備資訊
本研究的研究資料由國道公道高速公路總局所提供的 AVI 資料,AVI 採用 影像辨識技術,將通過 AVI 位置的車輛進行車牌辨識,並記錄通過的車牌與時 間。研究範圍內的 AVI 基本資料,如 AVI 的數量、位置等等資訊,整理如下表 3-3 所示: 表 3-3 國道 AVI 位置及自定編號 國道一號北上 AVI 編號 1 2 3 4 5 6 7 8 9 AVI 位置(里程數) 179.77 160.99 150.86 133.76 116.52 111.45 100.446 85.4 66.6 AVI 編號 9 10 11 12 13 14 15 AVI 位置(里程數) 66.6 54.2 43.47 34.17 23.36 13.26 0.56 國道一號南下 AVI 編號 1 2 3 4 5 6 7 8 9 AVI 位置(里程數) 0 12.08 24.826 36.3 50.4 63.4 81.96 98 109.249 AVI 編號 10 11 12 13 14 AVI 位置(里程數) 118.95 131.9 149.12 163.22 177.47 AVI 於研究範圍內,國道北上方向,台中-台北有 15 台偵測器,因此可將路 段切分為 12 條路段,本研究將 AVI 依照位置前後給定編號 1 至 15,其中以編號 1 做為台中交流道,編號 7 作為新竹交流道,編號 13 作為台北交流道。南下方 向,台北-台中有 14 台偵測器,因此可將路段切分為 13 段,給定編號依照前後 順序為 1 至 13,其中編號 3 為台北交流道,編號 8 為新竹交流道,編號 14 為台 中交流道。 AVI 所蒐集到的資料格式,如下表 3-4 所示,表中可以看出 AVI 資料提供 了設備位置、通過車輛車牌、車輛通過時間等資訊,因此可以藉由 AVI 蒐集, 車牌編碼及車輛通過時間,計算出旅行時間。 表 3-4 AVI 資料格式 AVI 設 備位置 偵測到車輛時間 加密的 車牌號碼 工程處 代碼 AVI 設備編碼 12080 3 2012/1/26 23:59 4dzE4T1453d 10 AVI-N1-S-12.080-M 36300 18 2012/1/26 23:59 4fDYyRk343d 10 AVI-N1-S-36.300-M 63400 25 2012/1/26 23:59 4ezIwR0513d 10 AVI-N1-S-63.400-M3.1.2
異常旅行時間樣本過濾
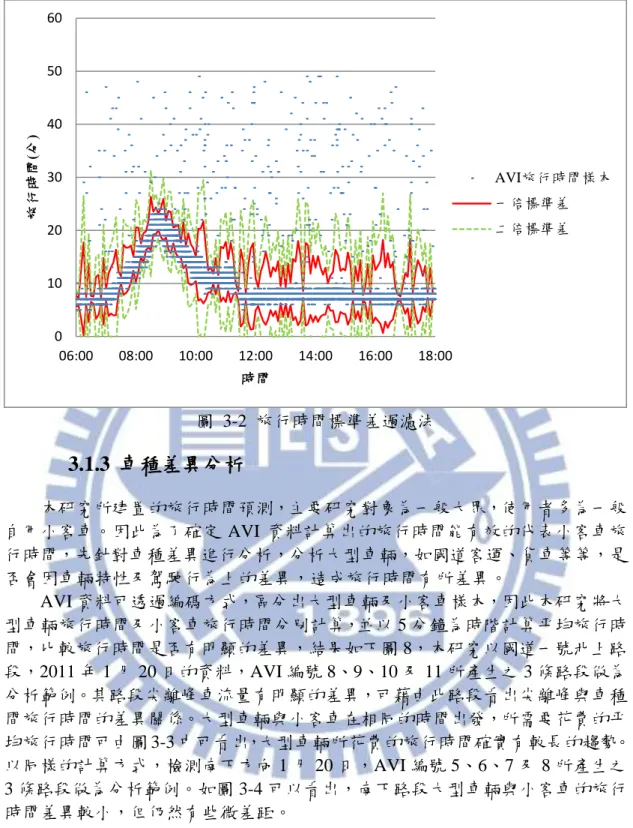
國道高速公路總局所提供之 AVI 資料為原始資料,隨機辨識通過車輛之車 牌,因此也包含許多不適切的樣本,例如駕駛暫時離開國道、進入休息站等等因 素,造成蒐集之旅行時間值異常的情況,必須先將異常值過濾,才能進行旅行時 間計算。如下圖 3-1 所示,此為國道一號北上路段於 2012 年 7 月 20 日,同時被 AVI 編號 12 與編號 13 所辨識的車輛樣本,也就是國道 34.17 公里至 23.36 公里 處之旅行時間樣本,兩座 AVI 於早上 6 點至晚上 6 點所蒐集資料,未經過濾的 旅行時間,含有許多高於平均旅行時間的極端值,若直接使用平均旅行時間則會 產生旅行時間誤差。 圖 3-1 旅行時間原始分佈 由於原始樣本包含許多不適切樣本,因此本研究必須發展出一套適用於過濾 AVI 旅行時間的機制。透過極端旅行時間樣本屬於少數的特性,因此本研究嘗試 以平均旅行時間的標準差進行過濾,利用旅行時間樣本的平均值與標準差產生之 上界與下界,將極端值加以濾除,經本研究測試後,效果以一倍標準差最為適切, 其結果果如下圖 3-2 所示,若將標準差提高將會納入較多極端旅行時間,因此本 研 究 以 1 倍 標 準 差 作 為 上 下 界 , 過 濾 極 端 的 AVI 旅 行 時 間 樣 本 。 0 10 20 30 40 50 60 06:00 08:00 10:00 12:00 14:00 16:00 18:00 旅 行 時 間 (分 ) 時間 AVI旅行時間樣本圖 3-2 旅行時間標準差過濾法
3.1.3
車種差異分析
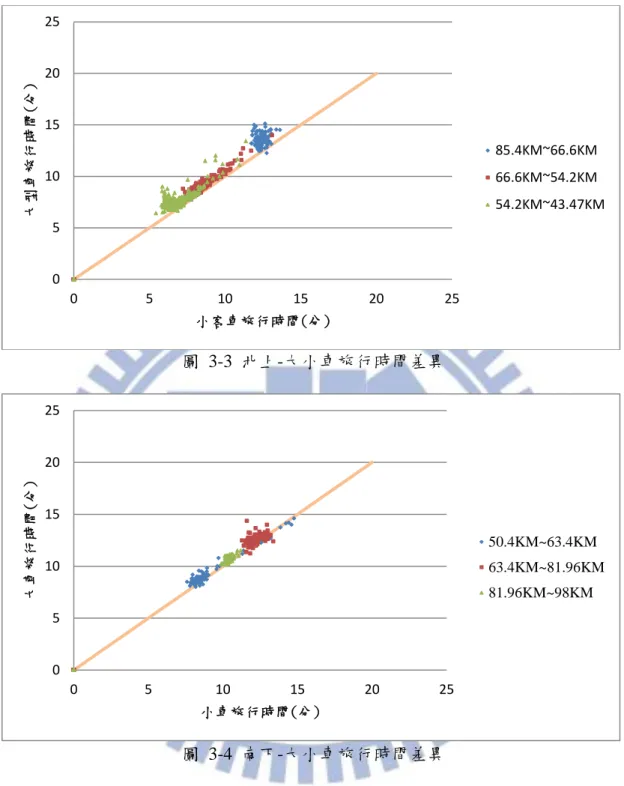
本研究所建置的旅行時間預測,主要研究對象為一般大眾,使用者多為一般 自用小客車。因此為了確定 AVI 資料計算出的旅行時間能有效的代表小客車旅 行時間,先針對車種差異進行分析,分析大型車輛,如國道客運、貨車等等,是 否會因車輛特性及駕駛行為上的差異,造成旅行時間有所差異。 AVI 資料可透過編碼方式,區分出大型車輛及小客車樣本,因此本研究將大 型車輛旅行時間及小客車旅行時間分別計算,並以 5 分鐘為時階計算平均旅行時 間,比較旅行時間是否有明顯的差異,結果如下圖 8,本研究以國道一號北上路 段,2011 年 1 月 20 日的資料,AVI 編號 8、9、10 及 11 所產生之 3 條路段做為 分析範例。其路段尖離峰車流量有明顯的差異,可藉由此路段看出尖離峰與車種 間旅行時間的差異關係。大型車輛與小客車在相同的時間出發,所需要花費的平 均旅行時間可由圖 3-3 中可看出,大型車輛所花費的旅行時間確實有較長的趨勢。 以同樣的計算方式,檢測南下方向 1 月 20 日,AVI 編號 5、6、7 及 8 所產生之 3 條路段做為分析範例。如圖 3-4 可以看出,南下路段大型車輛與小客車的旅行 時間差異較小,但仍然有些微差距。 0 10 20 30 40 50 60 06:00 08:00 10:00 12:00 14:00 16:00 18:00 旅 行 時 間 (分 ) 時間 AVI旅行時間樣本 一倍標準差 二倍標準差圖 3-3 北上-大小車旅行時間差異 圖 3-4 南下-大小車旅行時間差異 透過以上大型車輛與小客車的旅行時間比較圖,可以看出車輛的種類不同, 行駛相同的路段,花費的平均旅行時間也不同,因此本研究在旅行時間的計算上, 不考慮大型車輛的 AVI 資料。
3.1.4 AVI 辨識率
目前台灣國道高速公路上所使用的 AVI,辨識車輛的方式採用影像辨識,使 用影像辨識會產生許多問題,如車牌辨識錯誤、清晨及夜晚光線不足、下雨導致 影像不清楚等等狀況,因此在將 AVI 資料建置成旅行時間歷史資歷庫前,必須 先針對 AVI 辨識率做檢測,若辨識率過低,則 AVI 不適合使用於旅行時間推估。 辨識率的計算方式如下所示 0 5 10 15 20 25 0 5 10 15 20 25 大 型車 旅行時 間 (分 ) 小客車旅行時間(分) 85.4KM~66.6KM 66.6KM~54.2KM 54.2KM~43.47KM 0 5 10 15 20 25 0 5 10 15 20 25 大 車旅 行時間 ( 分 ) 小車旅行時間(分) 50.4KM~63.4KM 63.4KM~81.96KM 81.96KM~98KM本研究以 VD 所偵測之小客車車流量作為基準,檢視 AVI 的辨識率佔車流 的比例,使用 2012 年 1 月份,星期五的 AVI 及 VD 資料進行檢測。AVI 於研究 範圍內,國道北上方向有 15 座,分別檢視每座 AVI 於各時段的辨識數量,並且 利用最靠近 AVI 的 VD 蒐集的小客車車流量來比較,說明 AVI 的辨識率。以下 使用 2012 年 1 月 6 日國道一號北上,編號 11 之 AVI 作為範例,由下圖 3-5 可以 看出 AVI 的辨識情況,由於使用影像辨識,因此較早及較晚的辨識比例較車流 量低。 圖 3-5 VD 車流量與 AVI 辨識量 透過以最接近的 VD 偵測車流量可以看出 AVI 的辨識比率,但本研究不使 用大型車輛旅行時間樣本,為了避免 VD 將車種誤判導致分析有偏差,因此本研 究分別分析小客車及所有車種的辨識比率。 AVI 在尖峰及離峰的辨識比例情況,以正常的活動時間早上 6 點至晚上 10 點作為分析時間的時段去觀察 AVI 在不同時段的辨識表現,並將時間切割成 3 個時段進行分析,早上尖峰時段 6 點~11 點、離峰時段 11~16 點、晚上尖峰時段 16~22 點,針對不同性質的車流狀況去檢視 AVI 各路段的辨識比率。同樣以 1 月 6 日北上及南下路段的 AVI 做為檢測,除了檢視 AVI 的辨識率,也針對車輛 通過兩兩 AVI 所產生出的旅行時間樣本與小客車車流的比例。當天的分析結果 如下表 3-5、3-6、3-7 及 3-8。 0 50 100 150 200 250 300 350 400 450 6:00 8:00 10:00 12:00 14:00 16:00 18:00 偵 測數 量 ( 輛 ) 時間 VD偵測車流 AVI辨識數量 車流 時間範圍內 辨識量 時間範圍內 辨識率 VD AVI
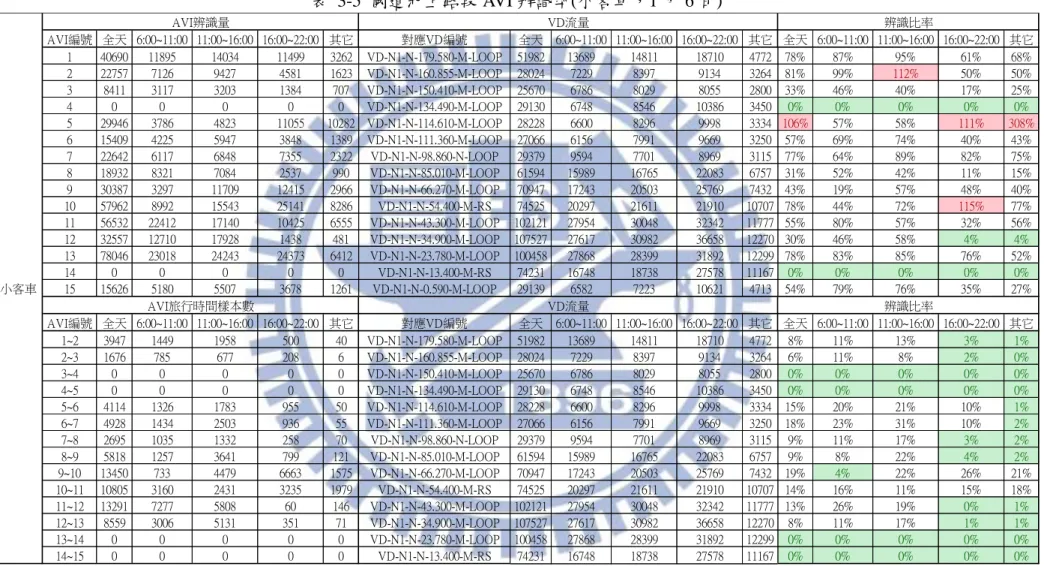
表 3-5 國道北上路段 AVI 辨識率(小客車,1 月 6 日) 表 3-6 國道北上路段 AVI 辨識率(所有車種,1 月 6 日) AVI編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 對應VD編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 1 40690 11895 14034 11499 3262 VD-N1-N-179.580-M-LOOP 51982 13689 14811 18710 4772 78% 87% 95% 61% 68% 2 22757 7126 9427 4581 1623 VD-N1-N-160.855-M-LOOP 28024 7229 8397 9134 3264 81% 99% 112% 50% 50% 3 8411 3117 3203 1384 707 VD-N1-N-150.410-M-LOOP 25670 6786 8029 8055 2800 33% 46% 40% 17% 25% 4 0 0 0 0 0 VD-N1-N-134.490-M-LOOP 29130 6748 8546 10386 3450 0% 0% 0% 0% 0% 5 29946 3786 4823 11055 10282 VD-N1-N-114.610-M-LOOP 28228 6600 8296 9998 3334 106% 57% 58% 111% 308% 6 15409 4225 5947 3848 1389 VD-N1-N-111.360-M-LOOP 27066 6156 7991 9669 3250 57% 69% 74% 40% 43% 7 22642 6117 6848 7355 2322 VD-N1-N-98.860-N-LOOP 29379 9594 7701 8969 3115 77% 64% 89% 82% 75% 8 18932 8321 7084 2537 990 VD-N1-N-85.010-M-LOOP 61594 15989 16765 22083 6757 31% 52% 42% 11% 15% 9 30387 3297 11709 12415 2966 VD-N1-N-66.270-M-LOOP 70947 17243 20503 25769 7432 43% 19% 57% 48% 40% 10 57962 8992 15543 25141 8286 VD-N1-N-54.400-M-RS 74525 20297 21611 21910 10707 78% 44% 72% 115% 77% 11 56532 22412 17140 10425 6555 VD-N1-N-43.300-M-LOOP 102121 27954 30048 32342 11777 55% 80% 57% 32% 56% 12 32557 12710 17928 1438 481 VD-N1-N-34.900-M-LOOP 107527 27617 30982 36658 12270 30% 46% 58% 4% 4% 13 78046 23018 24243 24373 6412 VD-N1-N-23.780-M-LOOP 100458 27868 28399 31892 12299 78% 83% 85% 76% 52% 14 0 0 0 0 0 VD-N1-N-13.400-M-RS 74231 16748 18738 27578 11167 0% 0% 0% 0% 0% 15 15626 5180 5507 3678 1261 VD-N1-N-0.590-M-LOOP 29139 6582 7223 10621 4713 54% 79% 76% 35% 27% AVI編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 對應VD編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 1~2 3947 1449 1958 500 40 VD-N1-N-179.580-M-LOOP 51982 13689 14811 18710 4772 8% 11% 13% 3% 1% 2~3 1676 785 677 208 6 VD-N1-N-160.855-M-LOOP 28024 7229 8397 9134 3264 6% 11% 8% 2% 0% 3~4 0 0 0 0 0 VD-N1-N-150.410-M-LOOP 25670 6786 8029 8055 2800 0% 0% 0% 0% 0% 4~5 0 0 0 0 0 VD-N1-N-134.490-M-LOOP 29130 6748 8546 10386 3450 0% 0% 0% 0% 0% 5~6 4114 1326 1783 955 50 VD-N1-N-114.610-M-LOOP 28228 6600 8296 9998 3334 15% 20% 21% 10% 1% 6~7 4928 1434 2503 936 55 VD-N1-N-111.360-M-LOOP 27066 6156 7991 9669 3250 18% 23% 31% 10% 2% 7~8 2695 1035 1332 258 70 VD-N1-N-98.860-N-LOOP 29379 9594 7701 8969 3115 9% 11% 17% 3% 2% 8~9 5818 1257 3641 799 121 VD-N1-N-85.010-M-LOOP 61594 15989 16765 22083 6757 9% 8% 22% 4% 2% 9~10 13450 733 4479 6663 1575 VD-N1-N-66.270-M-LOOP 70947 17243 20503 25769 7432 19% 4% 22% 26% 21% 10~11 10805 3160 2431 3235 1979 VD-N1-N-54.400-M-RS 74525 20297 21611 21910 10707 14% 16% 11% 15% 18% 11~12 13291 7277 5808 60 146 VD-N1-N-43.300-M-LOOP 102121 27954 30048 32342 11777 13% 26% 19% 0% 1% 12~13 8559 3006 5131 351 71 VD-N1-N-34.900-M-LOOP 107527 27617 30982 36658 12270 8% 11% 17% 1% 1% 13~14 0 0 0 0 0 VD-N1-N-23.780-M-LOOP 100458 27868 28399 31892 12299 0% 0% 0% 0% 0% 14~15 0 0 0 0 0 VD-N1-N-13.400-M-RS 74231 16748 18738 27578 11167 0% 0% 0% 0% 0% AVI旅行時間樣本數 VD流量 辨識比率 AVI辨識量 VD流量 辨識比率 小客車
表 3-7 國道南下路段 AVI 辨識率(小客車,1 月 6 日) AVI編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 對應VD編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 1 51106 13930 16854 14524 5798 VD-N1-N-179.580-M-LOOP 63284 16258 17830 21361 7835 81% 86% 95% 68% 74% 2 29800 8820 12009 6053 2918 VD-N1-N-160.855-M-LOOP 38020 9386 10820 11516 6298 78% 94% 111% 53% 46% 3 13560 4479 5051 2295 1735 VD-N1-N-150.410-M-LOOP 39228 9590 11151 12051 6436 35% 47% 45% 19% 27% 4 0 0 0 0 0 VD-N1-N-134.490-M-LOOP 39924 9157 11235 12959 6573 0% 0% 0% 0% 0% 5 54469 5163 6694 19024 23588 VD-N1-N-114.610-M-LOOP 38675 8979 10852 12471 6373 141% 58% 62% 153% 370% 6 23456 5950 8164 5964 3378 VD-N1-N-111.360-M-LOOP 37661 8590 10605 12198 6268 62% 69% 77% 49% 54% 7 26946 6904 8292 8347 3403 VD-N1-N-98.860-N-LOOP 38318 11687 9868 11061 5702 70% 59% 84% 75% 60% 8 21124 9302 7779 2778 1265 VD-N1-N-85.010-M-LOOP 74977 19485 20263 25174 10055 28% 48% 38% 11% 13% 9 33250 3529 13061 13412 3248 VD-N1-N-66.270-M-LOOP 85256 21173 24416 29073 10594 39% 17% 53% 46% 31% 10 64923 10197 17719 27074 9933 VD-N1-N-54.400-M-RS 81960 22178 23547 24053 12182 79% 46% 75% 113% 82% 11 63905 24820 19870 11694 7521 VD-N1-N-43.300-M-LOOP 120631 32651 35050 38210 14720 53% 76% 57% 31% 51% 12 37247 14302 20691 1671 583 VD-N1-N-34.900-M-LOOP 122092 31357 34984 40529 15222 31% 46% 59% 4% 4% 13 86216 25742 27687 25843 6944 VD-N1-N-23.780-M-LOOP 109145 30443 31271 33598 13833 79% 85% 89% 77% 50% 14 0 0 0 0 0 VD-N1-N-13.400-M-RS 85788 19825 22689 30460 12814 0% 0% 0% 0% 0% 15 18544 6322 6741 4128 1353 VD-N1-N-0.590-M-LOOP 33460 7887 8462 12000 5111 55% 80% 80% 34% 26% AVI編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 對應VD編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 1~2 5007 1770 2540 614 40 VD-N1-N-179.580-M-LOOP 63284 16258 17830 21361 7835 8% 11% 14% 3% 1% 2~3 2788 1125 1285 337 6 VD-N1-N-160.855-M-LOOP 38020 9386 10820 11516 6298 7% 12% 12% 3% 0% 3~4 0 0 0 0 0 VD-N1-N-150.410-M-LOOP 39228 9590 11151 12051 6436 0% 0% 0% 0% 0% 4~5 0 0 0 0 0 VD-N1-N-134.490-M-LOOP 39924 9157 11235 12959 6573 0% 0% 0% 0% 0% 5~6 6028 1836 2546 1313 50 VD-N1-N-114.610-M-LOOP 38675 8979 10852 12471 6373 16% 20% 23% 11% 1% 6~7 6702 1750 3194 1317 55 VD-N1-N-111.360-M-LOOP 37661 8590 10605 12198 6268 18% 20% 30% 11% 1% 7~8 2926 1102 1413 287 70 VD-N1-N-98.860-N-LOOP 38318 11687 9868 11061 5702 8% 9% 14% 3% 1% 8~9 5978 1276 3719 829 121 VD-N1-N-85.010-M-LOOP 74977 19485 20263 25174 10055 8% 7% 18% 3% 1% 9~10 14693 773 5082 7126 1575 VD-N1-N-66.270-M-LOOP 85256 21173 24416 29073 10594 17% 4% 21% 25% 15% 10~11 12677 3530 3035 3692 1979 VD-N1-N-54.400-M-RS 81960 22178 23547 24053 12182 15% 16% 13% 15% 16% 11~12 15061 8007 6823 69 146 VD-N1-N-43.300-M-LOOP 120631 32651 35050 38210 14720 12% 25% 19% 0% 1% 12~13 9512 3298 5762 377 71 VD-N1-N-34.900-M-LOOP 122092 31357 34984 40529 15222 8% 11% 16% 1% 0% 13~14 0 0 0 0 0 VD-N1-N-23.780-M-LOOP 109145 30443 31271 33598 13833 0% 0% 0% 0% 0% 14~15 0 0 0 0 0 VD-N1-N-13.400-M-RS 85788 19825 22689 30460 12814 0% 0% 0% 0% 0% AVI辨識量 VD流量 所有車輛 辨識比率 AVI旅行時間樣本數 VD流量 辨識比率
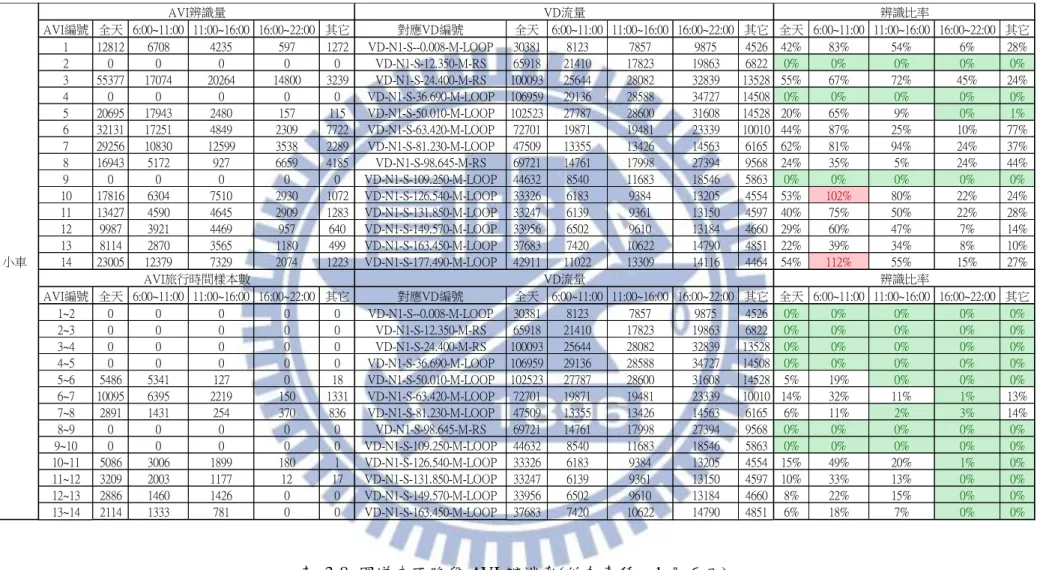
表 3-8 國道南下路段 AVI 辨識率(所有車種,1 月 6 日) AVI編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 對應VD編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 1 12812 6708 4235 597 1272 VD-N1-S--0.008-M-LOOP 30381 8123 7857 9875 4526 42% 83% 54% 6% 28% 2 0 0 0 0 0 VD-N1-S-12.350-M-RS 65918 21410 17823 19863 6822 0% 0% 0% 0% 0% 3 55377 17074 20264 14800 3239 VD-N1-S-24.400-M-RS 100093 25644 28082 32839 13528 55% 67% 72% 45% 24% 4 0 0 0 0 0 VD-N1-S-36.690-M-LOOP 106959 29136 28588 34727 14508 0% 0% 0% 0% 0% 5 20695 17943 2480 157 115 VD-N1-S-50.010-M-LOOP 102523 27787 28600 31608 14528 20% 65% 9% 0% 1% 6 32131 17251 4849 2309 7722 VD-N1-S-63.420-M-LOOP 72701 19871 19481 23339 10010 44% 87% 25% 10% 77% 7 29256 10830 12599 3538 2289 VD-N1-S-81.230-M-LOOP 47509 13355 13426 14563 6165 62% 81% 94% 24% 37% 8 16943 5172 927 6659 4185 VD-N1-S-98.645-M-RS 69721 14761 17998 27394 9568 24% 35% 5% 24% 44% 9 0 0 0 0 0 VD-N1-S-109.250-M-LOOP 44632 8540 11683 18546 5863 0% 0% 0% 0% 0% 10 17816 6304 7510 2930 1072 VD-N1-S-126.540-M-LOOP 33326 6183 9384 13205 4554 53% 102% 80% 22% 24% 11 13427 4590 4645 2909 1283 VD-N1-S-131.850-M-LOOP 33247 6139 9361 13150 4597 40% 75% 50% 22% 28% 12 9987 3921 4469 957 640 VD-N1-S-149.570-M-LOOP 33956 6502 9610 13184 4660 29% 60% 47% 7% 14% 13 8114 2870 3565 1180 499 VD-N1-S-163.450-M-LOOP 37683 7420 10622 14790 4851 22% 39% 34% 8% 10% 14 23005 12379 7329 2074 1223 VD-N1-S-177.490-M-LOOP 42911 11022 13309 14116 4464 54% 112% 55% 15% 27% AVI編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 對應VD編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 1~2 0 0 0 0 0 VD-N1-S--0.008-M-LOOP 30381 8123 7857 9875 4526 0% 0% 0% 0% 0% 2~3 0 0 0 0 0 VD-N1-S-12.350-M-RS 65918 21410 17823 19863 6822 0% 0% 0% 0% 0% 3~4 0 0 0 0 0 VD-N1-S-24.400-M-RS 100093 25644 28082 32839 13528 0% 0% 0% 0% 0% 4~5 0 0 0 0 0 VD-N1-S-36.690-M-LOOP 106959 29136 28588 34727 14508 0% 0% 0% 0% 0% 5~6 5486 5341 127 0 18 VD-N1-S-50.010-M-LOOP 102523 27787 28600 31608 14528 5% 19% 0% 0% 0% 6~7 10095 6395 2219 150 1331 VD-N1-S-63.420-M-LOOP 72701 19871 19481 23339 10010 14% 32% 11% 1% 13% 7~8 2891 1431 254 370 836 VD-N1-S-81.230-M-LOOP 47509 13355 13426 14563 6165 6% 11% 2% 3% 14% 8~9 0 0 0 0 0 VD-N1-S-98.645-M-RS 69721 14761 17998 27394 9568 0% 0% 0% 0% 0% 9~10 0 0 0 0 0 VD-N1-S-109.250-M-LOOP 44632 8540 11683 18546 5863 0% 0% 0% 0% 0% 10~11 5086 3006 1899 180 1 VD-N1-S-126.540-M-LOOP 33326 6183 9384 13205 4554 15% 49% 20% 1% 0% 11~12 3209 2003 1177 12 17 VD-N1-S-131.850-M-LOOP 33247 6139 9361 13150 4597 10% 33% 13% 0% 0% 12~13 2886 1460 1426 0 0 VD-N1-S-149.570-M-LOOP 33956 6502 9610 13184 4660 8% 22% 15% 0% 0% 13~14 2114 1333 781 0 0 VD-N1-S-163.450-M-LOOP 37683 7420 10622 14790 4851 6% 18% 7% 0% 0% AVI辨識量 VD流量 辨識比率 AVI旅行時間樣本數 VD流量 辨識比率 小車
AVI編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 對應VD編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 1 15357 8030 5132 748 1447 VD-N1-S--0.008-M-LOOP 34668 9339 9094 11223 5012 44% 86% 56% 7% 29% 2 0 0 0 0 0 VD-N1-S-12.350-M-RS 76131 25053 20823 22203 8052 0% 0% 0% 0% 0% 3 61587 19080 22943 16093 3471 VD-N1-S-24.400-M-RS 108168 28053 30606 34991 14518 57% 68% 75% 46% 24% 4 0 0 0 0 0 VD-N1-S-36.690-M-LOOP 120073 32670 32345 38155 16903 0% 0% 0% 0% 0% 5 23536 20330 2910 164 132 VD-N1-S-50.010-M-LOOP 116143 31347 32814 34740 17242 20% 65% 9% 0% 1% 6 36711 19441 5635 2595 9040 VD-N1-S-63.420-M-LOOP 85382 22820 23285 26333 12944 43% 85% 24% 10% 70% 7 32627 12025 14440 3813 2349 VD-N1-S-81.230-M-LOOP 59310 15887 16750 17237 9436 55% 76% 86% 22% 25% 8 20476 6293 1802 7742 4639 VD-N1-S-98.645-M-RS 79856 17119 20933 29908 11896 26% 37% 9% 26% 39% 9 0 0 0 0 0 VD-N1-S-109.250-M-LOOP 53698 10478 14252 20660 8308 0% 0% 0% 0% 0% 10 24218 8090 9396 4382 2350 VD-N1-S-126.540-M-LOOP 42192 8080 11810 15285 7017 57% 100% 80% 29% 33% 11 18883 5771 6225 4415 2472 VD-N1-S-131.850-M-LOOP 42062 7993 11795 15235 7039 45% 72% 53% 29% 35% 12 11855 4683 5332 1067 773 VD-N1-S-149.570-M-LOOP 42406 8256 11959 15205 6986 28% 57% 45% 7% 11% 13 8114 2870 3565 1180 499 VD-N1-S-163.450-M-LOOP 46331 9118 13042 16936 7235 18% 31% 27% 7% 7% 14 30352 14586 9389 3832 2545 VD-N1-S-177.490-M-LOOP 47365 12093 14328 14834 6110 64% 121% 66% 26% 42% AVI編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 對應VD編號 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 全天 6:00~11:00 11:00~16:00 16:00~22:00 其它 1~2 0 0 0 0 0 VD-N1-S--0.008-M-LOOP 34668 9339 9094 11223 5012 0% 0% 0% 0% 0% 2~3 0 0 0 0 0 VD-N1-S-12.350-M-RS 76131 25053 20823 22203 8052 0% 0% 0% 0% 0% 3~4 0 0 0 0 0 VD-N1-S-24.400-M-RS 108168 28053 30606 34991 14518 0% 0% 0% 0% 0% 4~5 0 0 0 0 0 VD-N1-S-36.690-M-LOOP 120073 32670 32345 38155 16903 0% 0% 0% 0% 0% 5~6 6308 6144 145 0 19 VD-N1-S-50.010-M-LOOP 116143 31347 32814 34740 17242 5% 20% 0% 0% 0% 6~7 11020 7019 2499 151 1351 VD-N1-S-63.420-M-LOOP 85382 22820 23285 26333 12944 13% 31% 11% 1% 10% 7~8 3158 1614 331 371 842 VD-N1-S-81.230-M-LOOP 59310 15887 16750 17237 9436 5% 10% 2% 2% 9% 8~9 0 0 0 0 0 VD-N1-S-98.645-M-RS 79856 17119 20933 29908 11896 0% 0% 0% 0% 0% 9~10 0 0 0 0 0 VD-N1-S-109.250-M-LOOP 53698 10478 14252 20660 8308 0% 0% 0% 0% 0% 10~11 6090 3466 2378 239 7 VD-N1-S-126.540-M-LOOP 42192 8080 11810 15285 7017 14% 43% 20% 2% 0% 11~12 3819 2278 1504 20 17 VD-N1-S-131.850-M-LOOP 42062 7993 11795 15235 7039 9% 28% 13% 0% 0% 12~13 2886 1460 1426 0 0 VD-N1-S-149.570-M-LOOP 42406 8256 11959 15205 6986 7% 18% 12% 0% 0% 13~14 2114 1333 781 0 0 VD-N1-S-163.450-M-LOOP 46331 9118 13042 16936 7235 5% 15% 6% 0% 0% 所有車輛 AVI辨識量 VD流量 辨識比率 AVI旅行時間樣本數 VD流量 辨識比率
AVI 的辨識比率可藉由表中分析出幾項特點,如(1)出現儀器故障、維護, 導致全天皆無辨識資料,辨識率為 0,(2)少數時間點會出現辨識率高於 VD 蒐集 之車流量,經檢查為 AVI 部分偶爾會出現資料傳輸問題,但不影響旅行時間樣 本比對,(3)AVI 於視線較差的晚間時段,辨識率普遍都偏低,原因為台灣國道 的 AVI 為影像辨識,光線不足導致辨識率降低,(4)AVI 經過計算後取得的旅行 時間樣本,在白天時段 6:00~16:00 皆有 10%~20%左右,晚間時段 16:00~22:00 辨識率則降至 5%左右,也就是以車流的百分之十至百分之二十旅行時間樣本作 為本研究之旅行時間歷史資料庫。 由於 VD 偵測器所偵測之車流量也區分大型車輛及小客車,本研究對於 VD 判別大型車輛及小客車有所顧慮,因此使用總車流及 AVI 總辨識量再次進行分 析,其結果如表所示,結果與上述結論一致,因此可以確定 AVI 的辨識率及特 點如上述 4 點。 AVI 設備本身會隨著設備老舊,辨識率也跟著降低,因此在進行研究前先進 行辨識率分析,目前國道 AVI 的辨識率至少有 50~60%以上,成功取得旅行時間 樣本的比率也有車流的 10%~20%,提供相當充足的旅行時間樣本,因此使用 AVI 資料推估旅行時間是可行的。
3.1.5
AVI 旅行時間樣本數
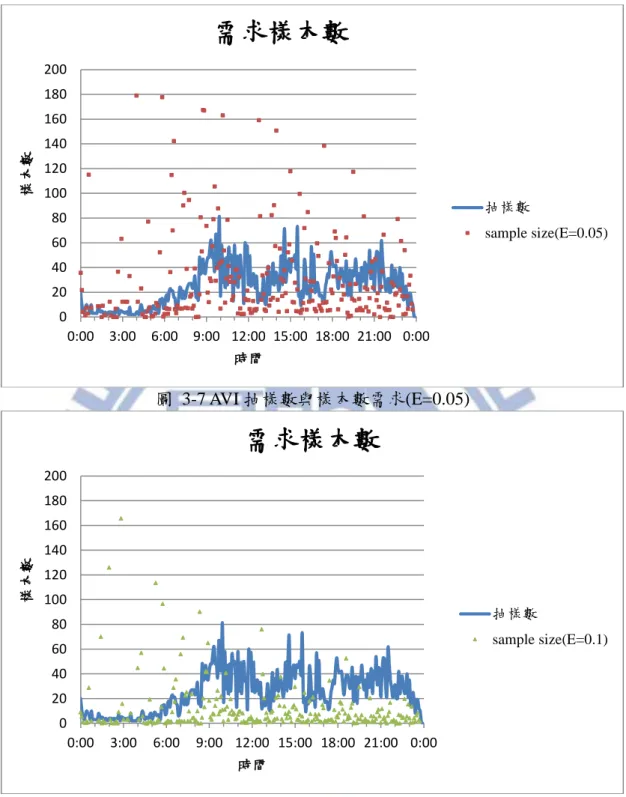
由 3.1.4 章節已經指出 AVI 在於辨識率的部分,在白天時間可以抽取小客車 車流的 10%~20%作為旅行時間樣本,本研究以每 5 分鐘為一個時階單位,計算 從該時階由起點出發至迄點所需要花費的旅行時間,因此 AVI 所蒐集的旅行時 間樣本,在時階內是否都有足夠的樣本數來代表該時階出發之平均旅行時間,若 有足夠的樣本數,則該時階所計算出的旅行時間方稱為有效。 在確定樣本數是否足夠時必須要有一些統計的前提假設,本研究假設駕駛者 行駛於高速公路,不包含異常旅行時間的情況下,從起點至迄點所需花費的旅行 時間呈現常態分配,由於樣本比例僅為車流的 10%~20%,因此母體變異數為未 知,使用樣本變異數進行推估,在 95%的信心水準底下,分別測試可接受誤差為 平均旅行時間的 5%、10%、20%,檢測 AVI 能否提供足夠的旅行時間樣本。本 研究採用王淵海(1999)透過接受誤差與變異數關係推估需求樣本數,如方程式(4) 所示: 2 2 2 2 / E S Z nt (4) 0.05 E 為接受誤差 為需求樣本數 n 若 AVI 在時階 t 取得的旅行時間樣本數大於需求樣本數,即說明 AVI 在時 階 t 有 95%的信心水準取得足夠的旅行時間樣本,誤差不超過 E。 本研究以 2012 年 1 月 27 日南下路段作為分析範例,分析 AVI 蒐集的旅行 時間樣本數是否足夠,以 5 分鐘內的旅行時間樣本變異數及旅行時間樣本平均, 使用 3.1.2 的方式進行過濾異常旅行時間,去除異常旅行時間後,計算過濾後的旅行時間樣本變異及過濾後的旅行時間樣本平均,分別在可接受誤差為 5%、10% 及 20%,代入上式,計算出達到足夠信心水準所需要的要本數。 下圖 3-10 為範例日期內,AVI 編號 3~4 路段在各時階的旅行時間,分析結 果顯示在 E=10%的情況下,AVI 於每日 288 個時階所蒐集的樣本數中,有 80.2% 是足夠的旅行時間樣本數,若扣除儀器故障或者無車輛通過等因素造成時階內無 蒐集任何資料等狀況,則通過的百分比則高達 88.2%。 圖 3-6 AVI 編號 3-4 路段旅行時間 由以上結果顯示,使用 AVI 進行旅行時間推估,有 95%的信心水準可以保 證 80.2%的時間內,旅行時間的誤差不超過平均旅行時間的 10%,但仍然有 19.8% 的旅行時間達不到 95%的信心水準,其中有 8%為無車輛行駛或者儀器故障所造 成,剩下 11.8%大多數為該時段內屬於車輛量較少的自由車流時段,車輛少且旅 行時間受到駕駛者個人行為影響的比重較高,造成樣本變異較高,導致需要有更 多的樣本數才能有足夠的信心水準。 以不同的接受誤差 5%、10%及 20%,分析上述相同的路段,可以看出在不 同的可接受誤差下,抽樣數與需求樣本數的變化關係圖,如下圖 15、16、17 所 示: 0 5 10 15 20 25 0:00 3:00 6:00 9:00 12:00 15:00 18:00 21:00 0:00 旅 行時 間 ( 分 ) 時間
E=10%,α=0.05
抽樣數足夠 抽樣數不足圖 3-7 AVI 抽樣數與樣本數需求(E=0.05) 圖 3-8 AVI 抽樣數與樣本數需求(E=0.1) 0 20 40 60 80 100 120 140 160 180 200 0:00 3:00 6:00 9:00 12:00 15:00 18:00 21:00 0:00 樣 本數 時間
需求樣本數
抽樣數 sample size(E=0.05) 0 20 40 60 80 100 120 140 160 180 200 0:00 3:00 6:00 9:00 12:00 15:00 18:00 21:00 0:00 樣 本數 時間需求樣本數
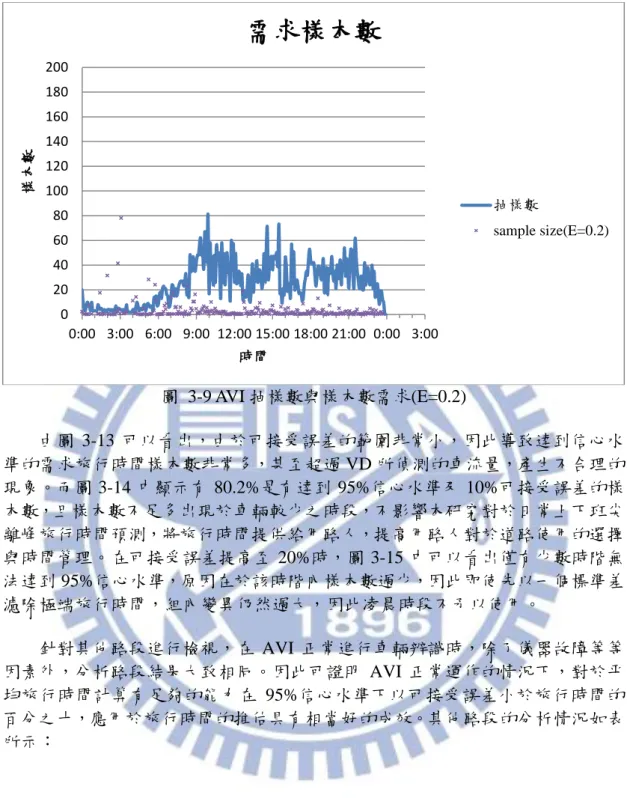
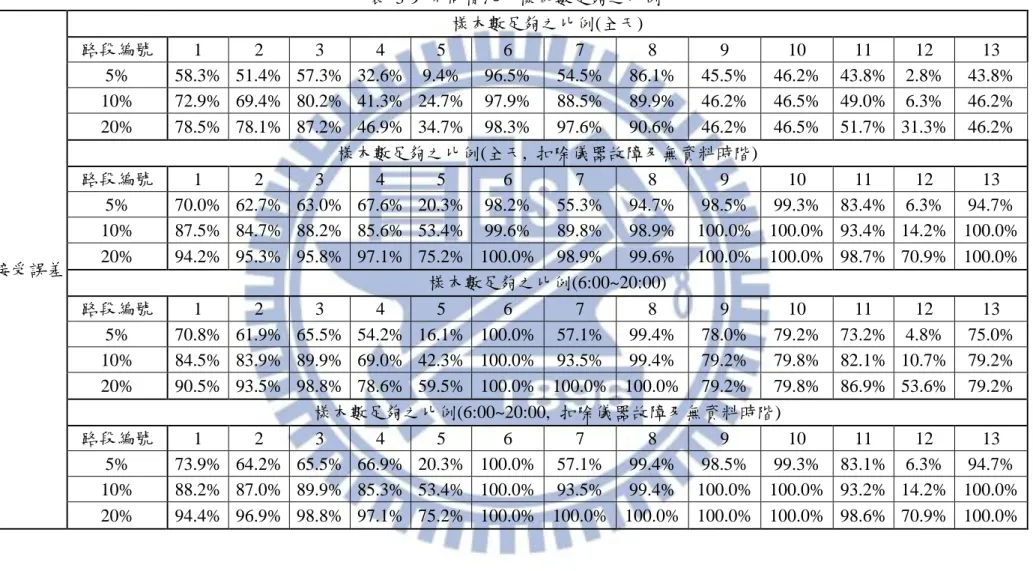
抽樣數 sample size(E=0.1)圖 3-9 AVI 抽樣數與樣本數需求(E=0.2) 由圖 3-13 可以看出,由於可接受誤差的範圍非常小,因此導致達到信心水 準的需求旅行時間樣本數非常多,甚至超過 VD 所偵測的車流量,產生不合理的 現象。而圖 3-14 中顯示有 80.2%是有達到 95%信心水準及 10%可接受誤差的樣 本數,且樣本數不足多出現於車輛較少之時段,不影響本研究對於日常上下班尖 離峰旅行時間預測,將旅行時間提供給用路人,提高用路人對於道路使用的選擇 與時間管理。在可接受誤差提高至 20%時,圖 3-15 中可以看出僅有少數時階無 法達到 95%信心水準,原因在於該時階內樣本數過少,因此即使先以一個標準差 濾除極端旅行時間,組內變異仍然過大,因此凌晨時段不予以使用。 針對其他路段進行檢視,在 AVI 正常進行車輛辨識時,除了儀器故障等等 因素外,分析路段結果大致相同。因此可證明 AVI 正常運作的情況下,對於平 均旅行時間計算有足夠的能力在 95%信心水準下以可接受誤差小於旅行時間的 百分之十,應用於旅行時間的推估具有相當好的成效。其他路段的分析情況如表 所示: 0 20 40 60 80 100 120 140 160 180 200 0:00 3:00 6:00 9:00 12:00 15:00 18:00 21:00 0:00 3:00 樣 本數 時間
需求樣本數
抽樣數 sample size(E=0.2)表 3-9 不同情況下樣本數足夠之比例 接受誤差 樣本數足夠之比例(全天) 路段編號 1 2 3 4 5 6 7 8 9 10 11 12 13 5% 58.3% 51.4% 57.3% 32.6% 9.4% 96.5% 54.5% 86.1% 45.5% 46.2% 43.8% 2.8% 43.8% 10% 72.9% 69.4% 80.2% 41.3% 24.7% 97.9% 88.5% 89.9% 46.2% 46.5% 49.0% 6.3% 46.2% 20% 78.5% 78.1% 87.2% 46.9% 34.7% 98.3% 97.6% 90.6% 46.2% 46.5% 51.7% 31.3% 46.2% 樣本數足夠之比例(全天, 扣除儀器故障及無資料時階) 路段編號 1 2 3 4 5 6 7 8 9 10 11 12 13 5% 70.0% 62.7% 63.0% 67.6% 20.3% 98.2% 55.3% 94.7% 98.5% 99.3% 83.4% 6.3% 94.7% 10% 87.5% 84.7% 88.2% 85.6% 53.4% 99.6% 89.8% 98.9% 100.0% 100.0% 93.4% 14.2% 100.0% 20% 94.2% 95.3% 95.8% 97.1% 75.2% 100.0% 98.9% 99.6% 100.0% 100.0% 98.7% 70.9% 100.0% 樣本數足夠之比例(6:00~20:00) 路段編號 1 2 3 4 5 6 7 8 9 10 11 12 13 5% 70.8% 61.9% 65.5% 54.2% 16.1% 100.0% 57.1% 99.4% 78.0% 79.2% 73.2% 4.8% 75.0% 10% 84.5% 83.9% 89.9% 69.0% 42.3% 100.0% 93.5% 99.4% 79.2% 79.8% 82.1% 10.7% 79.2% 20% 90.5% 93.5% 98.8% 78.6% 59.5% 100.0% 100.0% 100.0% 79.2% 79.8% 86.9% 53.6% 79.2% 樣本數足夠之比例(6:00~20:00, 扣除儀器故障及無資料時階) 路段編號 1 2 3 4 5 6 7 8 9 10 11 12 13 5% 73.9% 64.2% 65.5% 66.9% 20.3% 100.0% 57.1% 99.4% 98.5% 99.3% 83.1% 6.3% 94.7% 10% 88.2% 87.0% 89.9% 85.3% 53.4% 100.0% 93.5% 99.4% 100.0% 100.0% 93.2% 14.2% 100.0% 20% 94.4% 96.9% 98.8% 97.1% 75.2% 100.0% 100.0% 100.0% 100.0% 100.0% 98.6% 70.9% 100.0%