仿生機器馬機構設計
仿生機器馬機構設計
仿生機器馬機構設計
仿生機器馬機構設計
Mechanism Design of Kinetic Horse
組員 組員 組員 組員: : 陳芬融: : 陳芬融陳芬融 陳芬融 謝宇凡謝宇凡謝宇凡謝宇凡 鄭宜東鄭宜東 鄭宜東鄭宜東 指導老師指導老師指導老師: 指導老師: : : 吳文章吳文章吳文章 吳文章國立聯合大學機械工程學系
摘要
摘要
摘要
摘要
來自一位荷蘭藝術家以及動態雕刻家創作者泰奧楊森 Theo Jansen 以著名的仿生獸為他的藝術代名詞,利用塑膠、木頭 等常見的無生物物體所創造,藉由力學的原理和風力的推動,可以做出一些仿生物的動作,甚至可以自行躲避障礙物,各種 逼真的仿生走獸在他的不斷創作下,也讓他的作品成了荷蘭的著名觀光之一,所以這來自國外的點子啟發我們,決定回歸我 們機械的最根本來做一個仿生機構,用一個個設計好的原件,利用最原始的機械模式來讓它成為一個栩栩如生的一個生物機 構,用著 solidworks 軟體去繪出單隻馬腳的機構,和去實做出一個比例1:1的機構馬,除了看它動是否像動畫般來的順 暢,在順著加馬的身體和馬頭和尾巴,完成一個動起來像真的馬一樣的生物機構。
關鍵字:仿生機構、機器馬、泰奧楊森、solidworks1. 前言
前言
前言
前言
人類一直在探索自然界奧秘,也不斷地模擬自然界的運 作,並且將生物的行為、本能、蛋白組織與微量系統等仿 生的研究應用於人類科技以及社會發展等層面。仿生學 (Bio-mimetic)是於 1958 年由美國空軍軍官 Jack E. Steele 所提出,主要概念是模仿生物系統、具有生物系統 特徵、或是類似生物系統方式的研究科學,其研究層面十 分地廣泛,包含了力學仿生、分子仿生、能量仿生、信息 與控制仿生等。仿生學主要是透過觀察、研究和模擬自然 界生物各種各樣的特殊本領,包括生物身體結構、行為、 各器官功能、生物化學以及記憶傳遞 等,將這些原理應用 於科學技術中,可以提供新的設計概念或是系統架構
。
2.
2.
2.
2. 文獻探討
文獻探討
文獻探討
文獻探討 ︰
圖 2-2 沈煥文型木車馬[2]
圖 3-1 曲柄搖桿機構自由體圖 本次的主題仿生機器馬機構設計中,我們將會用到平 面平面四連桿機構中曲柄搖桿機構,面對平面封閉式運動 鏈自由度計算,可利用古柏方程式(Gruebler`s equation) F = 3 (L – 1) – 2P1 – P2
(1) 在圖 3-1 中,L = 8,P1 = 10,P2 = 0 則 F = 3 (8 – 1) – 2 X 10 – 0 = 1 (2) 曲柄 2 繞樞軸 O2 旋轉,並經由聯結桿 3 帶動曲柄 4 繞 O4 搖擺
,
在四連桿系統中,若較短的側桿旋轉,另一側桿擺 動時,此稱為曲柄搖桿機構。
此連桿組許符合下列條件:O
2B + BC + O
4C > O
2O
4O
2B + O
2O
4+ O
4C > BC
O
2B + BC - O
4C < O
2O
4BC - O
2B + O
4C > O
2B
3.2 討論模擬
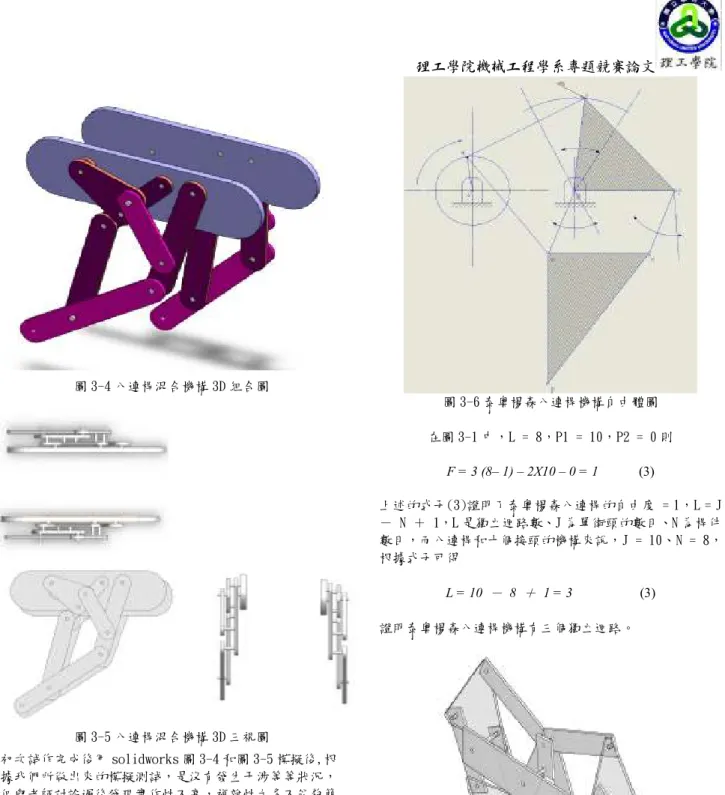
首先在網路上學找資料取的腿部桿件的造型,再取得 各桿件的相關尺寸取得各桿件的尺寸後我們先用發泡板試 做一次,因為找到的資料尺寸太小所以我們決定放大兩倍 來做,先用 solidworks 畫出各桿件將圖檔列印出來畫在發 泡板上,之後依照各桿件的位置裝配。 圖 3-2 八連桿混合機構 3D 組合圖 圖 3-3 八連桿混合機構實作組合圖 初步設計是先訂出尺寸,尺寸訂好後將各零件及連桿繪 出,組裝的部分剛開始進行得很順利,但是在整個腿部機 構繪製完成圖 3-2 後發現有些機構與機構之間連接的方法 在實作時是不太可行的,後來在慢慢修正確認可行性之後 用保麗龍板試做了機構。第一次組裝的腿部桿件成品圖 3-3,組裝完後試著轉動看看,發現各桿件會互相干涉,後 來才知道我們每一層機構並沒有用墊片隔開,所以導致干 涉。
圖 3-4 八連桿混合機構 3D 組合圖 圖 3-5 八連桿混合機構 3D 三視圖 初次試作完成後用 solidworks 圖 3-4 和圖 3-5 模擬後,根 據我們所做出來的模擬測試,是沒有發生干涉等等狀況, 但與老師討論過後發現實作性不高,複雜性太多不能夠簡 而有力的展現仿生機構栩栩如生的運動型態,因此我們決 定換另外一種機構試試看,而八連桿混合機構就當個學習 經驗
。
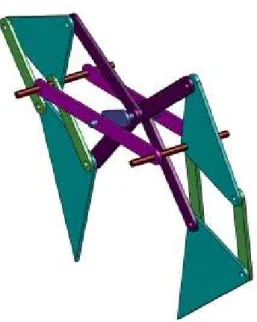
之後,在老師的與我們的討論放棄前一個機構後,我 們又找到不同的機構來做,這次的資料是由老師提供,而 且真的去參考了泰奧楊森的仿生機構,雖連桿數目不減, 卻以不同的桿件作為主要活動,此機構的活動曲線也較前 一種機構來的高。
圖 3-6 泰奧楊森八連桿機構自由體圖 在圖 3-1 中,L = 8,P1 = 10,P2 = 0 則 F = 3 (8– 1) – 2X10 – 0 = 1 (3) 上述的式子(3)證明了泰奧楊森八連桿的自由度 = 1,L = J - N + 1,L 是獨立迴路數、J 為單街頭的數目、N 為桿件 數目,而八連桿和十個接頭的機構來說,J = 10、N = 8, 根據式子可得 L = 10 - 8 + 1 = 3 (3) 證明泰奧楊森八連桿機構有三個獨立迴路。圖 3-8 泰奧楊森八連桿機構 3D 組合圖 另外我們一在修改圖檔也模擬非金屬媒材加以著色的機構 模樣來參考圖 3-8 因為壓克力板其實非常不好裁切,而且 價格也十分昂貴,在有限的資源裡我們也是盡可能的節省 資源物盡其用,但又考慮到機構的某些部位需要強固性高 的媒材來支撐,不能夠因為節省資源而做出一個不堪負荷 的機構,仔細衡量和拿幾個媒材試做實驗後,我們決定部 分的機構採用壓克力板,其餘的部分改採用好裁切又易得 到的輕薄木板、木片、和木筷作為這次的主要媒材
。
圖 3-9 泰奧楊森八連桿機構 3D 零件圖 此零件圖(圖 3-9)會用強硬度高的壓克力板做,此機件在帶 動關節的部分需要這般的牢固性。
動的連結件。
圖 3-11 泰奧楊森八連桿機構 3D 零件圖 此零件圖圖 3-11 為機構馬腿部的連桿件以木片為媒材。
圖 3-12 泰奧楊森八連桿機構馬 3D 造型圖 在完成機構之後我們隨即加了馬的一些模樣圖 3-12 讓我們 去更多的空間去思考馬的造型和機構如何聯結,同時也開 始對於馬的造型的想法感到越來越有趣。
圖 3-13 真馬圖 機構馬的造型其實我們在機構完成前就已有在收及各種馬 的圖片了,其還蠻難選擇的,因為太過複雜的造型其實很 難裁切,但太過簡單的造型又過於呆板不夠逼真,圖 3-13 是我們最後決定採用的真馬圖
。
圖 3-14 真馬臨摹圖 利用 solidworks 把圖放在背景然後在沿著想要的部位繪上 平面輪廓後展出圖料,如圖 3-14 多曲面的馬頭就是這樣繪 製的,但某些部分的部位我們也有自行設計。
圖 3-16 泰奧楊森八連桿機構馬 3D 造型零件爆炸圖 馬的造型圖 3-14 邊畫邊修改,在設計的部分上還是讓馬身 去迎合機構,在馬的各部位也微調模擬過,圖 3-16 是泰奧 楊森八連桿機構馬的造型零件爆炸圖。
圖 3-17 泰奧楊森八連桿機構馬 3D 造型成品圖 經過 solidworks 的零件繪製到一一組奘後,如圖 3-17 完 成了我們的仿生機構馬圖,克服了很多誤差和配合度,從 中心桿的微調次數最多,馬頭和馬尾搖擺不能夠太大或不圖 3-18 泰奧楊森八連桿機構馬 3D 造型成品爆炸圖 圖 3-19 泰奧楊森八連桿機構馬 3D 造型成品前視圖 在軟體上有著栩栩如生的活動曲線和馬的奔跑和行走的模 樣在搭配媒材的紋路(圖 3-19)看起來真的十分生動
。
3.3 實品實作
在最後的實做我們選擇先做了馬身為主,好讓之後在 腿部的機構裝配上得以方便,用繪圖軟體繪出的造型馬 身,經由比例放大印出圖檔,在將需要製作的部分一一剪 裁下來在木板上畫輪廓並在孔洞上做記號,之後在用線鋸 沿著輪廓一一裁切下來,然後在去鑽孔。
圖 3-20 泰奧楊森八連桿機構馬的造型馬身圖 圖 3-21 泰奧楊森八連桿機構馬的造型半身品圖 圖 3-22 泰奧楊森八連桿機構馬的內部主軸圖圖 3-23 泰奧楊森八連桿機構馬的內部主軸俯視圖 機構馬的身體好了之後在來就是內部帶動整體活動的主曲 桿,在裝配的時候其實不容易,因一個不小心媒材會隨著 力道太大或還保有干涉的狀態而造成損壞,而讓裝配的我 們都一直不斷微調和實驗著下一次的裝配情形,好來讓機 構馬順利的轉動帶動著馬頭馬尾和四支馬腿
。
圖 3-24 泰奧楊森八連桿機構馬實作成品圖 最後在大家齊力下,完成了最終的實體仿生機構馬, 雖然在實作的時候有失敗了好幾個連桿,也在裝配後發現 和想像的有出入而有重頭來過,不過終於完成了真正的仿 生機構馬。
4. 研究結果與討論
研究結果與討論
研究結果與討論
研究結果與討論
先從別人的論文和資料上取得一些基本該知道的觀 念,在加上些許創意和慨念讓作品尚有著驚人的結果,在 運曲柄機構的幫助連桿有著往復運動,中心軸分成各一百5. 結論
結論
結論
結論
畫出八連桿二足仿生機構,也確實在軟體裡的機構馬 腳可以動的很自然,但馬的頭、尾巴、和身體還沒組合上 去在構想上就覺得可行性不太容易,之後我們討論運動分 析,我們多次的在組合圖模擬機構是否干涉,從中也發現 模擬比實作更好找出缺失,然而面對實作後我們卻要討論 還要不要做八連桿混合機構機構馬,因發現有些實做性不 高,馬也會不成比例,所以擇另一種機構並加入造型。
我們選了七連桿較簡而有力的仿生計構來作為實作的指標 選用了薄木板、木筷、條狀木片、壓克力當材料,這些都 取得方便的媒材,在做的時候的時候其實有一直去試機構 的牢固和是否干涉不會到後來組好才又發現錯誤,失敗再 重來,等於是馬的本體和機構我們是分開來做的同時也在 找尋它們之間的契點。最後做好的時候,也參考到每個細 節,用繪圖軟體模擬到實作機構到無干涉在裝配馬身的過 程,謝謝老師的細心指導,這次的專題跟老師完的很愉快, 也發現機械不會只有呆板的一面,且充滿無限色彩。
參考文獻
參考文獻
參考文獻
參考文獻
[1]
邱正平,波浪型步態機器馬之設計,國立成功大學機 械工程學系碩士論文,1996。
[2]
顏鴻森,"步行機器馬",中華民國專利 290,468,1996。[3]
黃凱,最佳八連桿型機器馬之研究,國立成功大學機 械工程學系碩士論文, 1997。
[4]
洪芝青,混合八連桿型步行機器馬之機構設計 On the Mechanism Design of A Hybrid 8-link Type Walking Horse,國立成功大學機械 2002/5