國立交通大學
電控工程研究所
碩士論文
應用最佳化輪胎與路面間摩擦力分配於車輛運動控制
Application of Optimum Tire Force Distribution to
Vehicle Motion Control
研 究 生:鄭勝元
指導教授:蕭得聖 博士
應用最佳化輪胎與路面間摩擦力分配於車輛運動控制
Application of Optimum Tire Force Distribution to Vehicle Motion Control
研 究 生:鄭勝元 指導教授:蕭得聖 博士
Student:Sheng-Yuan Cheng Advisor:Dr. Te-Sheng Hsiao
國立交通大學 電控工程研究所
碩士論文
A Thesis
Submitted to Institute of Electrical Control Engineering College of Electrical Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
In
Electrical Control Engineering September 2011
Hsinchu, Taiwan, Republic of China
i
應用最佳化輪胎與路面間摩擦力分配於車輛運動控制
學生:鄭勝元 指導教授:蕭得聖 博士
國立交通大學電控工程研究所
摘要
近年來越來越多的國內外汽車大廠都紛紛投入電動車的發展,電動車將會成為未來 交通載具新興的發展趨勢,其除了有環保節能的效益外,亦可提供不同的車輛驅動與操 控架構,例如:四輪獨立驅動與四輪獨立轉向等等。而基於電動車所提供的驅動與操控 架構,可應用更先進的運動控制技術提升車輛的安全性與操控性。 本研究針對四輪獨立驅動與四輪獨立轉向車輛,將運動控制架構分為上、下層控制 器,上層控制器計算所需的縱向合力、側向合力與橫擺力矩的總和,使車輛的動態跟隨 給定的參考軌跡;下層控制器則考慮輪胎的非線性特性以及與真實輪胎間模型不確定性 的問題,藉由控制輪胎力矩與轉向角產生所需的輪胎摩擦力。上層與下層控制器之間透 過最佳化摩擦力分配將上層控制器所需之力量適當地分配給每個輪胎,再由下層控制器 使各個輪胎產生所需的縱向與側向摩擦力。本研究透過模擬驗證在轉向與車道變換的駕 駛情況下控制器控制的結果,在此控制架構下,能夠改善四輪轉向在車輛側向加速度大 時對車輛運動控制的不穩定問題,以及彌補直接橫擺力矩控制對車輛側向運動控制的不 足。ii
Application of Optimum Tire Force Distribution to
Vehicle Motion Control
Student:Sheng-Yuan Cheng Advisor:Dr. Te-Sheng Hsiao
Institute of Electrical Control Engineering
National Chiao Ting University
Abstract
In this paper, the proposed vehicle motion control structure is separated into the upper controller and the lower controller. The sliding mode control technique is used in the upper controller for calculating the amount of total longitudinal force, lateral force and yaw moment such that the vehicle can track a given reference trajectory. Then the optimum tire force distribution algorithm determines the longitudinal and lateral forces of each tire, subject to the constraints that the resulting forces and moment of all tires meet the requirements of the upper controller, and that the friction ellipse of each tire is satisfied. In the lower controller, a nonlinear Dugoff‟s tire model is considered when using sliding mode control technique to generate the assigned tire forces by controlling the wheel torque and the steering angle. Comparisons of the proposed control structure with the four-wheel steering control and direct yaw moment control are conducted by simulations. The results indicate that the proposed structure can improve the handling performance and stability of vehicle motion when the other control methods fail in the event of high lateral acceleration.
iii
致謝
首先誠摯的感謝指導教授蕭得聖博士,老師悉心的教導以及對我研究能力的信任, 讓我能夠順利的完成碩士論文的研究,不僅在理論上有更清楚的認識,且在研究的過程 中該如何面對問題、解決問題,以及分析問題的經驗也獲益匪淺,可謂獲益良多。 本論文的完成另外亦得感謝我的口試委員徐保羅教授與陳宗麟教授。因為有各位老 師在口試中給的建議及方向,使得本論文能夠更完整而嚴謹。 兩年裡的日子,感謝永洲、翊熏學長不厭其煩的指出我研究中的缺失,且總能在我 迷惘時為我解惑,也感謝宜熹同學、偉仁同學與偉杰同學的共同砥礪。俊傑、伯俊、志 偉、昌謀與彥良學弟的加油與鼓勵,也讓我備感溫馨。感謝其他實驗室的大學同學和在 台北的高中同學,能在我研究苦悶時陪我一起娛樂,讓我得以放鬆心情。 最後我要感謝永遠支持我的家人,有他們的支持使我在求學的階段能夠一路堅持下 去,所以在此我要將此論文獻給我的家人,我的父母。iv
目錄
中文摘要 ... i 英文摘要 ... ii 致謝 ... iii 目錄 ... iv 圖目錄 ... vi 表目錄 ... viii 符號表 ... ix 第一章、緒論 ... 1 1.1 研究背景 ... 1 1.2 研究目的 ... 2 1.3 研究貢獻 ... 3 1.4 論文架構 ... 4 第二章、相關研究 ... 5 2.1 四輪轉向控制相關研究 ... 5 2.2 直接橫擺力矩控制相關研究 ... 8 第三章、車輛系統模型 ... 11 3.1 車輛動態模型 ... 11 3.2 輪胎模型 ... 15 第四章、控制器設計 ... 17 4.1 上層控制器 ... 18 4.1.1 車輛參考模型 ... 18v 4.1.2 車輛縱向速度、車身側滑角與橫擺角速度控制器 ... 21 4.2 最佳化輪胎與路面間摩擦力分配 ... 25 4.2.1 成本函數 ... 25 4.2.2 最佳化問題求解 ... 27 4.3 下層控制器 ... 29 4.3.1 縱向力估測 ... 30 4.3.2 縱向摩擦力回授穩健控制器 ... 30 4.3.3 即時適應性路面摩擦力估測 ... 36 4.3.3.1 自適應性法設計 ... 36 4.3.3.2 自適應性法平衡點與保守估測 ... 37 4.3.4 輪胎側滑角控制器 ... 42 第五章、模擬與結果討論 ... 46 5.1 J-turn ... 48 5.2 Single-lane change ... 54 5.3 相關控制器控制結果比較 ... 60 第六章、結論與未來展望 ... 68 6.1 結論 ... 68 6.2 未來工作 ... 69 參考文獻 ... 70
vi
圖目錄
圖 1.1 控制系統流程方塊圖 ... 3 圖 2.1 腳踏車模型 ... 5 圖 2.2 後輪轉角前饋控制[4] ... 6 圖 2.3 後輪轉角回饋控制[4] ... 7 圖 2.4 解耦合控制系統[5]... 7 圖 2.5 DYC 控制系統方塊圖,擷取自[9] ... 9 圖 3.1 輪胎自由體俯視圖 ... 11 圖 3.2 車輛自由體俯視圖 ... 12 圖 3.3 輪胎轉動自由體圖 ... 13 圖 3.4 輪胎側滑角和前進速度示意圖 ... 14 圖 3.5 結合縱向力與側向力摩擦力圓 ... 16 圖 4.1 系統架構圖 ... 18 圖 4.2 最大車身側滑角與質心速度關係圖[18] ... 20 圖 4.3 縱向滑動比與最大縱向摩擦力關係圖 ... 35 圖4.4 “Magic formula”縱向滑動比與最大縱向摩擦力關係圖(左)、輪胎縱向力對滑動比 偏微斜率( )與 比較圖(右) ... 35 圖 4.5 估測誤差函數 ( ) ... 39 圖 4.6 估測誤差函數 ( ) ... 40圖 4.7 “Magic formula”側向力與 Dugoff‟s 輪胎模型側向力之比值 ... 44
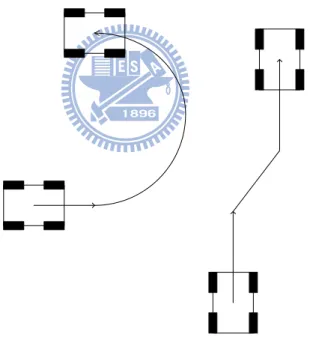
圖 5.1 車輛行駛路徑示意圖 (左: J-turn, 右: Single-lane change) ... 46
圖 5.2 模擬一之駕駛者轉向命令(左)與路面摩擦力係數(右) ... 49
圖 5.3 模擬一之縱向力最佳化分配、估測與實際結果 ... 49
圖 5.4 模擬一之側向力最佳化分配與實際結果 ... 50
vii
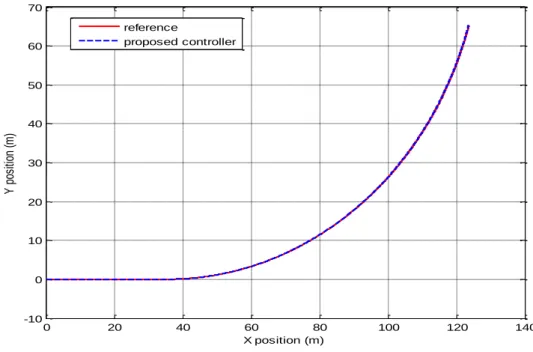
圖 5.6 模擬一之車輛於地表座標上所行駛的參考路徑與車輛控制結果 ... 51
圖 5.7 側向摩擦力與正向力關係圖( ):Magic formula 輪胎模型(右)、Dugoff‟s 輪胎模型(左) ... 51 圖 5.8 模擬二之駕駛者轉向命令(左)與路面摩擦力係數(右) ... 52 圖 5.9 模擬二之縱向力最佳化分配、估測與實際結果 ... 52 圖 5.10 模擬二之側向力最佳化分配與實際結果 ... 53 圖 5.11 模擬二之車速(左)、質心側滑角(中)、橫擺角速度(右)參考值與車輛控制結果 . 53 圖 5.12 模擬二之車輛於地表座標上所行駛的參考路徑與車輛控制結果 ... 54 圖 5.13 模擬三之駕駛者轉向命令(左)與路面摩擦力係數(右) ... 55 圖 5.14 模擬三之縱向力最佳化分配、估測與實際結果 ... 55 圖 5.15 模擬三之側向力最佳化分配與實際結果 ... 56 圖 5.16 模擬三之車速(左)、質心側滑角(中)、橫擺角速度(右)參考值與車輛控制結果 . 56 圖 5.17 模擬三之車輛於地表座標上所行駛的參考路徑與車輛控制結果 ... 57 圖 5.18 模擬四之駕駛者轉向命令(左)與路面摩擦力係數(右) ... 57 圖 5.19 模擬四之縱向力最佳化分配、估測與實際結果 ... 58 圖 5.20 模擬四之側向力最佳化分配與實際結果 ... 58 圖 5.21 模擬四之車速(左)、質心側滑角(中)、橫擺角速度(右)參考值與車輛控制結果 . 59 圖 5.22 模擬四之車輛於地表座標上所行駛的參考路徑與車輛控制結果 ... 59 圖 5.23 模擬五之駕駛者轉向命令(左)與路面摩擦力係數(右) ... 61 圖 5.24 模擬五之控制車輛橫擺角速度比較圖 ... 61 圖 5.25 模擬五之控制車輛質心側滑角比較圖 ... 62 圖 5.26 模擬五之控制車輛縱向速度比較圖 ... 62 圖 5.27 模擬五之控制車輛於地表座標上所行駛路徑比較圖 ... 63 圖 5.28 模擬五之控制車輛輪胎轉向角比較圖 ... 64 圖 5.29 模擬六之駕駛者轉向命令(左)與路面摩擦力係數(右) ... 64 圖 5.30 模擬六之控制車輛橫擺角速度比較圖 ... 65
viii 圖 5.31 模擬六之控制車輛質心側滑角比較圖 ... 65 圖 5.32 模擬六之控制車輛縱向速度比較圖 ... 66 圖 5.33 模擬六之控制車輛於地表座標上所行駛路徑比較圖 ... 66 圖 5.34 模擬六之上層控制器縱向合力 X(左)與側向合力 Y (右)計算結果 ... 67
表目錄
表 5.1 模擬中所使用的車輛參數 ... 47 表 5.2 模擬中所使用的”Magic formula”輪胎模型參數 ... 48 表 5.3 兩種 DYC 控制型式之權重因子值[12] ... 61ix
符號表
r :橫擺角速度 :車輛質心縱向速度 :車輛質心側向速度 :車體質心側滑角 :車輛縱向加速度 :車輛側向加速度 :重力加速度 :車輛橫擺力矩 :橫擺角轉動慣量 :車體質量 :車體集中質量 :車體集中質量之質心與地面的高度 :車輛前輪輪距 :車輛後輪輪距 :車體質心到前輪軸的距離 :車體質心到後輪軸的距離 :前輪軸到後輪軸的距離 :車輪轉向角 :輪胎轉動角速度 :輪胎前進速度 :輪胎轉動慣量 :輪胎轉動半徑 :輪胎等效半徑x :輪胎縱向滑動比 :輪胎側滑角 :理論滑動 :縱向理論滑動 :側向理論滑動 :輪胎扭矩 :平行胎面之縱向摩擦力 :“Magic formula” 輪胎模型純縱向滑動之縱向摩擦力 :垂直胎面之側向摩擦力 :“Magic formula” 輪胎模型純側向側滑之側向摩擦力 :平行車身的力 :垂直車身的力 :輪胎正向力 :車輛等速直線行駛時輪胎的正向力 :輪胎參數 :輪胎參數 :輪胎參數 :輪胎參數 :橫擺角速度參考值 :車體質心側滑角參考值 :車輛質心縱向速度參考值 :上層控制器計算所需的縱向合力 :上層控制器計算所需側向合力 :上層控制器計算所需橫擺力矩總和 :順滑平面 :路面摩擦力係數
xi :路面摩擦力係數估測值 :第 i 個輪胎的權重參數 :縱向力估測結果 :Dugoff‟s 輪胎模型之縱向摩擦力 :分配之縱向力參考值 :Dugoff‟s 輪胎模型之側向摩擦力 :分配之側向力參考值 :反輪胎模型計算之輪胎側滑角參考值 :Dugoff‟s 輪胎模型之縱向剛度 :Dugoff‟s 輪胎模型之轉向剛度 :順滑平面
1
第一章、 緒論
1.1 研究背景
近年來環保意識抬頭,能源危機和全球氣候暖化變遷的議題不斷地被各界討論,許 多企業也都持續於發表與開發新的綠色環保產品和概念。 在汽車工業方面,越來越多的國內外汽車大廠都紛紛投入發展電動車或是油電混合 動力車的行列,像是國內廠商中納智捷發表的智慧型電動車 Lexgen M7、美國電動車廠 商特斯拉(Tesla)的 純 電 動 跑 車 TESLA Roadster、德國賓士推出的 Mini E、三菱量產 的 i-MiEV,以及日本汽車廠商 TOYOTA 的 Prius 油電混合動力車等等,都是希望能以 電能取代傳統汽油能源達到節能的目的,並且減少行駛時廢氣的排放。加上先進國家近 年來均積極促進電動車產業發展,推動多項補助政策,預期電動車在未來的市佔率將會 有所提升。在電動車研究與控制上,Yoichi Hori[1]在論文中提到電動車發展與研究的價值,是 適合在電動車上應用”先進的運動控制(Advanced motion control)”技術;電動車使用馬達 或者是輪內馬達(In-wheel motor)作為車輛的動力,可以總結出三項優點:(1)電動馬達可 以快速且準確的產生出扭力。回授控制器可以在駕駛者對車輛動態作改變前,對車輛作 控制。 (2)馬達可以安裝在兩個或四個輪內。將馬達安裝到每一個輪胎,可以讓左右兩 側的輪胎產生不同方向的扭力,實現控制策略。 (3)馬達的扭力容易量測。馬達的扭力 可以從量測馬達的電流得知,或者是用扭力感測器(Torque sensor)也可以量測。利用量 測到扭力的資訊,設計簡單的輪胎與路面間縱向摩擦力估測器,就可以估測出加速或減 速時摩擦力的大小。在 Yoichi Hori、Peng He[1][2][3]的論文中,所研究的車輛是他們改 造 Nissan March 所設計的電動車:UOT (University of Tokyo) Electric March II,在車輛 四個輪胎內都有安裝輪內馬達,能夠獨立控制每個輪內馬達的扭力。此外,國內研究單 位也有不錯的電動車研究成果展現,像是工研院所研發的四輪電動車 e-buggy,也展現 了未來綠能動力電動車發展的可能性。
2
當越來越多駕駛者選擇駕駛電動車當作日常代步工具時,車輛本身駕駛上的舒適性, 以及目前所關注的環保節能的問題上很重要外,安全的駕駛系統一直以來也都是一個非 常重要的議題。在車輛轉向的穩定性控制已經有很多學者做這方面的研究,且提出不同 的 控制 策略;像 是四輪轉向 (Four-wheel steering:4WS)控制[4][5][6]、差動式煞車 (Differential brake) 轉 向 控 制 [7] 、 直 接 橫 擺 力 矩 控 制 (Direct yaw moment control : DYC)[8][9][11] , 以 及 本 研 究 所 使 用 的 最 佳 化 輪 胎 摩 擦 力 分 配 (Optimum tire force distribution)控制方法[21]等等,都有不錯的研究成果。 一般車輛在道路上行駛,路面的狀況會直接影響到車輛輪胎與路面間的受力,而輪 胎與路面間的受力又會影響到車輛的動態,所以如果可以估測車輛輪胎與路面間摩擦力, 控制器可以利用此資訊更有效的控制輪胎動態,讓車輛在不同的路面狀況下都能保持安 全與穩定地行駛。例如:車輛某側輪胎行駛過一水灘,控制器就必頇控制使車輛保持原 行駛路徑,避免打滑;車輛在作轉向時,有效平均分配車輛輪胎與路面間摩擦力作控制, 保持轉向的穩定安全;此外,控制器若能即時得知此時輪胎與路面間摩擦力大小,也可 以控制輪胎扭力或轉角避免輪胎鎖死或打滑。因此,電動車若具有估測路面摩擦力的系 統,判斷路面與輪胎間的摩擦力,回授設計控制器作控制,將有助於控制車輛的行駛動 態。 本研究致力於如何將估測的摩擦力回授設計控制器,並且建立車輛運動控制系統, 包含車輛縱向速度、車身質心側滑角,以及橫擺角速度的穩定控制,透過最佳化輪胎摩 擦力的分配,更有效且安全的控制車輛的行駛。
1.2 研究目的
本研究目的在於設計車輛運動控制系統,最佳化分配出各個輪胎與路面間所需要產 生的摩擦力,並由下層控制器控制輪胎動態產生所需的摩擦力,使得車輛達到我們所希 望的動態運動。在此研究中控制器可分為三個部分:上層控制器、最佳化輪胎與路面間3 摩擦力分配和下層縱向摩擦力回授穩健控制器、輪胎側滑角控制器。上層控制器計算出 車輛維持行駛路徑所需的縱向、側向合力以及橫擺力矩的總和,然後經由最佳化分配出 車輛四個輪胎與路面間所需要產生的縱向摩擦力與側向摩擦力;下層控制器,控制輪內 馬達的扭力大小和車輪的轉向角度,使得輪胎和路面間產生上層控制器分配出來的摩擦 力,如圖 1. 1 流程說明。 駕駛人下達轉向命令 上層控制器計算路徑跟隨所需之縱向、側向合力與橫擺力 矩總和 最佳化分配出平行與垂直胎面之輪胎與路面間摩擦力 下層控制器控制輪胎扭矩與轉角 控制車輛 X Y M adi
F
F
bdi miT
i 圖 1. 1 控制系統流程方塊圖1.3 研究貢獻
本研究設計出的車輛運動控制系統,包含上層控制器、最佳化輪胎與路面間摩擦力 分配和下層縱向摩擦力回授穩健控制器、輪胎側滑角控制器。 一般傳統控制器對輪胎模型的假設為線性輪胎模型,沒有考慮輪胎的非線性特性, 故在車輛側向加速度較大時,會因為輪胎非線性的特性,使得輪胎飽和,造成控制器不 再能保證車輛側向與橫擺運動的穩定。而本研究設計的下層控制器有考慮輪胎非線性之 特性,在控制器中假設一非線性輪胎模型,並考慮其動態以及與真實輪胎間模型不確定 性(Model uncertainty)的問題,設計控制策略避免輪胎鎖死或打滑的情況發生,進而提升 車輛運動控制的穩定性。4 此外,若在緊急情況下,一般駕駛者通常無法輕易地自行操控車輛修正行駛路徑, 使車輛依然可以行駛於安全的行駛路徑,故此時必頇藉由控制器來控制車輛動態跟隨給 定的參考軌跡,行駛於安全的路徑。然而在緊急狀況下,駕駛者會下達較大的轉向命令, 車輛側向加速度也較大,故一般傳統控制器將無法保證車輛側向與橫擺運動的穩定,而 本研究設計的控制器則依然可以控制車輛跟隨給定的參考路徑。
1.4 論文架構
論文各章節的編排如下 第一章 緒論:描述研究背景、動機與目的。 第二章 相關研究:介紹各種不同車輛轉向控制的控制方法,然後簡介本研究使用的控 制方法。 第三章 車輛系統模型:本研究使用的車輛模型為一個考慮車輛縱向、側向速度和橫擺 角速度運動的動態模型,四輪可獨立驅動和轉向。 第四章 控制器設計:包含上層控制器、最佳化輪胎與路面間摩擦力分配和下層縱向摩 擦力回授穩健控制器、輪胎側滑角控制器設計。 第五章 模擬與結果討論:模擬各種駕駛狀況下控制器控制的結果,並且和其他控制器 控制的結果作比較。 第六章 結論與未來展望:總結本研究並提出未來能更深入發展的方向。5
第二章、 相關研究
在提升車輛轉向的操控性與穩定性,近年來已經有很多學者提出不同的控制策略, 像是四輪轉向控制、差動式煞車轉向控制、直接橫擺力矩控制等等。其中又以四輪轉向 控制最為常見用來控制車輛側向運動的控制策略,而差動式煞車轉向控制與直接橫擺力 矩控制都是藉由輪胎與路面間之縱向力對車輛產生橫擺力矩控制車輛的動態,底下將會 針對四輪轉向控制和直接橫擺力矩控制加以探討分析。2.1 四輪轉向控制相關研究
從 1980 年代開始,四輪轉向控制就被視為能提升車輛駕駛性的控制策略,相關的 研究和控制器設計方法都陸陸續續被提出。四輪轉向控制設計一般是基於輪胎側向力與 輪胎側滑角有一線性比例關係存在,此關係只存在於當車輛側向加速度較小時。對車輛 動態模型的描述為兩個自由度的腳踏車模型(Bicycle model),如圖 2. 1。 f f f v r r v r f l r l 2Fyf 2Fyr C.O.G. V ry
x
圖 2. 1 腳踏車模型6 ;C.O.G.為質心位置; 、 、 分別為質心速度、質心側滑角、橫擺角速度; 、 為前、 後輪前進速度; 、 為車體質心到前、後輪軸的距離。 忽略車輛俯仰(Pitch)與側傾(Roll)的動態,並假設前、後輪轉角( 、 )皆為小角度, 車輛以一定速度行駛, 方向力平衡可由下式表示:
2 yf 2 yr mV r F F (2.1) ;其中 為車體質量。而當前、後輪胎側滑角( 、 )很小時,前、後輪側向力( 、 )可由 (2.2) (2.3)式線性關係式表示。 yf f f F C (2.2) yr r r F C (2.3) ; 、 為前、後輪轉向剛度(Cornering stiffness), 、 關係式如下: y f f f x V rl V (2.4) y f r r x V rl V (2.5)Yoshimi Furukawa et al.[4]將 4WS 控制策略大略分成兩種:前饋(Feed-forward)補償 (圖 2. 2)與回饋(Feedback)補償(圖 2. 3)。 Driver 1/n Vehicle k + -e reference course sw f r motion 圖 2. 2 後輪轉角前饋控制[4]
7 Driver 1/n Vehicle p + -e reference course sw f r motion motion 圖 2. 3 後輪轉角回饋控制[4] 且提到 4WS 減小質心側滑角的控制器設計,前饋補償控制器如圖 2. 2,設計比例控 制器 :
2 2 f r x r f r r f x f f r ml l V C l l k ml l V C l l (2.6) 可以控制使得車輛穩態質心側滑角為零。J rgen Ackermann[5]提出一去除橫擺角速度(Yaw rate)對前輪側滑角影響的解耦合 控制策略,如(2.7~9)式,圖 2. 4。 f wf r (2.7)
1 f s fref f f w k a a a V (2.8) r D f l k r w V (2.9) Vehicle 1 s -- af r D l k V s k 1 V f k V , r F s V s wf r w ref a f r 圖 2. 4 解耦合控制系統[5]8
此控制策略設計使駕駛者只需控制車輛前輪軸側向加速度( ), 對後輪轉向變為不
可控(Uncontrollable)。
V.Nikzad. S. and M. Naraghi 在[6]中提到兩種 4WS 控制架構:單轉向控制(Single
Steering Control)與雙轉向控制(Dual Steering Control)。單轉向控制前輪轉角由駕駛者控 制,只有後輪轉角是由控制器控制,所以控制器只能控制選擇控制車輛橫擺角速度或側 向速度其中之一的狀態,不過好處就是控制器的實現與設計較為容易;雙轉向控制則是 控制器可以控制前、後輪轉角,可以控制車輛橫擺角速度與側向速度。
2.2 直接橫擺力矩控制相關研究
DYC 的研究開始於 1990 年代,Shibahata et al.[8]提出了一種控制方法:” -Method”, 且探討質心側滑角對由前、後輪側向力產生的橫擺力矩改變之影響。指出當車輛維持一 同心圓轉向時,橫擺力矩若由不平衡的輪胎側向力產生會造成車輛縱向加速或減速。 直接橫擺力矩控制是靠車輛左右兩側輪胎縱向力差來產生橫擺力矩達到控制之目 的,大致被分為兩種控制型式:質心側滑角型式(Side-slip type)、橫擺角速度型式(Yaw rate type)。Masato Abe 在[9]提出設計順滑模態控制器來跟隨 2DOF 線性車輛模型的質心側滑 角響應,從順滑條件以及車輛動態方程式(2.10)與(2.11)式,設計出橫擺力矩控制輸入。
f r mV r Y Y (2.10) z f f r r z I rl Y l Y M (2.11) ; 、 為前、後輪側向力; 為其控制輸入,設計會和前、後輪側向力及其對輪胎側 滑角偏微之斜率有關,故有假設一非線性輪胎模型用來計算,控制架構圖如圖 2. 5。9
圖 2. 5 DYC 控制系統方塊圖,擷取自[9]
P. Raksincharoens et al.[10]利用 DYC 控制策略控制車輛跟隨其設計所需的橫擺角 速度,橫擺力矩控制輸入是由後輪左、右側縱向力的差產生,如(2.12)式。
2 xrl xrr d M F F (2.12) 所需的 是由所需橫擺角速度透過橫擺角速度對橫擺力矩的反轉移函數計算而得。 E. Esmaizadeh et al.[11]提出分析線性二次最佳化問題(LQ problem)求解 DYC 控制 輸入,跟隨所需的橫擺角速度。M. Mirzaei[12]為了維持車輛的動態,跟隨所需的橫擺角 速度與質心側滑角,設計一線性二次最佳化問題,求解最小之橫擺力矩控制輸入以達到 控制目的。其成本函數定為(2.13)式。
2
2 2 0 1 2 f t b d r d u z J
w w rr w M dt (2.13) ;其中 、 和 為權重因子,代表其對應項之重要性; 為控制輸入。增加 之權 重可以讓 越小,但相對的會使橫擺角速度和質心側滑角的跟隨誤差(Tracking error)增 大;此外,控制策略是設計來跟隨橫擺角速度和質心側滑角,故可以輕易地藉由改變 或 為零,實現不同控制型式的 DYC 控制,如:實現橫擺角速度型式則將 選定為零, 則為質心側滑角型式。 上述研究中,四輪轉向控制可以直接地改變車輪轉角,影響輪胎側滑角及輪胎與路 面間產生的側向力,控制車輛的側向運動,在控制器設計與車輛動態的描述上較為容易。10 車輛動態可被描述為線性腳踏車模型,控制器也可設計簡單的 P、PI 控制器,即可提升 車輛駕駛的穩定性。然而,就如先前所提到的:四輪轉向控制設計一般是基於輪胎側向 力與輪胎側滑角有一線性比例關係存在,而這關係僅作用於車輛側向加速度小的情況下。 在車輛側向加速度較大時,四輪轉向控制會因為輪胎非線性的特性,使輪胎側向力飽和, 此時側向力與側滑角不再是線性關係,且輪胎正向力對側向力的影響也會增加,因此控 制器改變車輪轉角不再能使輪胎與路面間產生正比於輪胎側滑角之側向力,造成控制器 不再能保證車輛側向與橫擺運動的穩定。 直接橫擺力矩控制利用左、右側輪胎與路面間產生之縱向力的差,所造成的橫擺力 矩控制車輛的動態,所需的橫擺力矩是藉由分配左、右側輪胎縱向力來產生。好處是在 輪胎摩擦力圓限制內,輪胎縱向力的產生,較不受車輛側向動態的影響,所需的縱向力 可直接由所需產生的橫擺力矩計算而得,故在車輛側向加速度較大的駕駛情況下,考慮 輪胎非線性特性,DYC 控制策略會比 4WS 控制來得更能提升車輛的操控性與安全性。 不過,由於 DYC 控制是去調整控制左右側輪胎縱向力之差,而沒有直接地控制輪胎側 向力,所以對車輛側向運動的控制效能會有所降低。再者,因為輪胎縱向力和側向力存 在著摩擦力圓限制的關係,DYC 控制很難去決定每個輪胎所需的縱向力和側向力,以 達到控制車輛所需的側向合力與橫擺力矩,像是在[9]就提出需利用一適當的輪胎模型, 先藉由輪胎側滑角計算對應的側向力與側向輪胎模型的斜率(Cornering power),再去計 算控制所需的橫擺力矩輸入,所以在縱向力分配決定上比較困難。 在本研究中將控制架構設計分成上、下層控制器,上層控制器計算所需的縱向合力、 側向合力與橫擺力矩,使車輛的動態跟隨給定的參考軌跡;下層控制器則考慮輪胎的非 線性特性,藉由控制輪胎力矩與轉向角產生所需的輪胎摩擦力,上層與下層控制器之間 透過最佳化摩擦力分配將上層控制器所需之力量適當地分配給每個輪胎,再由下層控制 器使各個輪胎產生所需的縱向與側向摩擦力。因此,在車輛側向加速度較大時,相較於 4WS 更能夠提升車輛駕駛的穩定性,而且又能改善 DYC 對車輛側向運動控制的不足。
11
第三章、 車輛系統模型
本章節將介紹本研究中使用的車輛系統模型,此模型為一個七個自由度的車輛模型 和一個結合縱向力與側向力摩擦力圓關係的“Magic formula”輪胎模型。七個自由度包含: 車輛縱向、側向速度運動、橫擺角速度動態,以及四個輪胎的動態。3.1 車輛動態模型
車輛行駛於道路上,輪胎與地面接觸產生摩擦力,影響車輛的運動,輪胎的自由體 圖,如圖 3. 1: xF
yF
aF
bF
車 頭 方 向 圖 3. 1 輪胎自由體俯視圖 為平行胎面之縱向摩擦力, 為垂直胎面之側向摩擦力; 為車輪轉向角。依照 向量的概念,將 和 分解成平行車身的力 與垂直車身的力 ,如下: cos sin sin cos x a b y a b F F F F F F (3.1) 假設車輛所受的外力和橫擺力矩都是由輪胎與路面間摩擦力所造成,不去考慮車輛 行駛間空氣風阻力或者外界額外的擾動對車輛動態造成的影響。輪胎與路面間摩擦力影 響車輛運動自由體圖,如圖 3. 2 所示。利用牛頓第二運動定律和尤拉運動方程式推導得 知車輛動態方程式,表示如(3.2~4)式:12 y V x V
r
f t r t f l r l 1 x F Fx2 3 x F Fx4 1 y F Fy2 3 y F Fy4 1 2 3 4V
車 頭 方 向 圖 3. 2 車輛自由體俯視圖 4 4 4 1 1 1 cos sin x xi ai i bi i i i i ma F F F
(3.2) 4 4 4 1 1 1 sin cos y yi ai i bi i i i i ma F F F
(3.3) 2 2 2 2 1 1 1 1 4 4 4 4 3 3 3 3 1 1 1 1 2 2 2 2 3 3 3 3 4 4 4 4( cos sin cos sin )
2
( cos sin cos sin )
2
( sin cos sin cos )
( sin cos sin cos )
f z z a b a b r a b a b f a b a b r a b a b t I r M F F F F t F F F F l F F F F l F F F F
(3.4) ;其中車輛縱向加速度( )和側向加速度( ),如(3.5)和(3.6)式: x x y a V rV(3.5) y y x a V rV (3.6) 、 和 為作用於車輛動態的縱向合力、側向合力和橫擺力矩總和; 和 為車體質量和橫擺角轉動慣量; 、 和 分別表示車輛質心縱向速度、側向速度和橫 擺角速度; 為車體質心側滑角; 為車輛前輪輪距, 為後輪輪距; 為車體質心到前 輪軸的距離, 為車體質心到後輪軸的距離。
13 ai
F
ziF
wR
i
miT
圖 3. 3 輪胎轉動自由體圖 由圖 3. 3 的輪胎轉動自由體圖,藉由力矩平衡推導出輪胎旋轉動態方程式(3.7)式。 1,..., 4 w i w ai mi I R F T i (3.7) ;其中 為輪胎轉動慣量, 為第 i 個輪胎的轉動角加速度, 為輪胎轉動半徑, 為 馬達與煞車對第 i 個輪胎施加的力矩之和。 輪胎與路面間摩擦力作用下造成輪胎縱向滑動與側滑,輪胎縱向滑動比(Slip ratio) 定義如(3.8)式: cos 1,..., 4 max{ , cos } w i i i i w i i i R v i R v (3.8) ; 表示為第 i 個輪胎的前進速度,表示如下: 2 2 1 2 2 2 2 2 3 2 2 4 ( ) ( ) 2 ( ) ( ) 2 ( ) ( ) 2 ( ) ( ) 2 f x y f f x y f r x y r r x y r t v V r V l r t v V r V l r t v V r V l r t v V r V l r (3.9) 而輪胎側滑角(Slip angle: )為輪胎轉動方向與速度方向之間的夾角,如(3.10)式, 圖 3. 4。14 i
車 頭 方 向 i
iv
圖 3. 4 輪胎側滑角和前進速度示意圖 1 1 1 1 2 2 1 3 3 1 4 4 tan 2 tan 2 tan 2 tan 2 y f f x y f f x y r r x y r r x V l r t V r V l r t V r V l r t V r V l r t V r (3.10) 考慮車輛縱向加速度及側向加速度對車體重量轉移所造成的影響,輪胎的正向力可 以由(3.11)式表示: 1 2 3 4 2 2 2 2 2 2 2 2 s y r s s x s r z f s y r s s x s r z f f s x s s y f s z r f s x s s y f s z r m a l h m a h mgl F l l t l m a l h m a h mgl F l l t l mgl m a h m a l h F l l t l mgl m a h m a l h F l l t l (3.11)15 ; 為前輪軸到後輪軸的距離, 為車體集中質量(Sprung-mass), 為車體集中質量之 質心與地面的高度, 為重力加速度。
3.2 輪胎模型
輪胎與路面間產生的摩擦力會直接影響到車輛動態的運動。本研究中所使用的輪胎 模型為 Pacejka[13]所提出的“Magic formula”,(3.1)式中平行胎面的力( )與垂直胎面的 力( )即是利用此非線性的模型來描述。在此非線性的輪胎模型純縱向滑動 (for pureaccelerating or braking)會與縱向滑動比(Slip ratio)有一非線性關係,純側向側滑 (for
pure cornering)則與側滑角(Slip angle)存在一非線性關係,且都會受到輪胎所受之正向力 的影響。此模型如(3.12)與(3.13)式表示:
1 1
0 sin tan 1 / tan
a x x x x x x x
F D C B E E B B (3.12)
1 1
0 sin tan 1 / tan
b y y y y y y y F D C B E E B B (3.13) ;其中 為輪胎滑動比、 為輪胎側滑角, 、 、 、 為輪胎參數。 當考慮輪胎動態同時發生縱向滑動和側向側滑時,(3.1)式中平行胎面的力( )與垂 直胎面的力( )將表示如下: 0 ( x ) ( ) a a F F (3.14) ( y ) 0( ) b b F F (3.15) ; 為理論滑動(Theoretical slip), 、 和 、 關係如(3.16)式: 2 2 1 1 tan 1 x y x y (3.16)
16 在不同的側滑角下,結合縱向力與側向力的非線性輪胎模型, 與 摩擦力圓關係, 如圖 3. 5。 圖 3. 5 結合縱向力與側向力摩擦力圓 綜合以上分析與推導,把車輛動態模型與輪胎模型結合寫成一非線性動態方程式, 如(3.17)式,其中輸入為 與 , 。
1 4 1,2,3,4 1,2,3,4 , , , , , , T x y m X r V V X f X T (3.17) -50000 -4000 -3000 -2000 -1000 0 1000 2000 3000 4000 5000 500 1000 1500 2000 2500 3000 3500 4000 4500 輪 胎 縱 向 摩 擦 力 (N) 輪胎側向摩擦力 (N ) 側 滑 角 遞 增17
第四章、 控制器設計
本章節將介紹本研究的控制器設計,包含上層控制器、最佳化輪胎與路面間摩擦力 分配和下層縱向摩擦力回授穩健控制器、輪胎側滑角控制器。
上層控制器部分會介紹線性車輛參考模型,並根據車輛運動時物理限制對其響應 (Model response)作物理極值的限制,設計順滑模態控制器(Sliding mode controller)作軌跡 跟隨(Tracking error)的控制[14],計算出車輛所需的縱向、側向合力與橫擺力矩的總和; 最佳化輪胎與路面間摩擦力分配部分將介紹成本函數(Cost function)的設計概念,並利用 卡 羅 需— 庫 恩 — 塔 克 條 件 (Karush-Kuhn-Tucker conditions) 求 解 非 線 性 規 劃 問 題 (Nonlinear programming)[15],最小化成本函數,且分配出滿足摩擦力圓限制的輪胎與路 面間摩擦力。 下層控制器部分,分別介紹輪胎縱向摩擦力回授控制與輪胎側向摩擦力控制。在縱 向摩擦力控制部分,回授縱向力估測的結果,設計順滑模態控制器控制馬達的扭力,使 輪胎與路面間產生上層所分配的縱向摩擦力,並設計即時適應性路面摩擦力係數估測器, 當期望跟隨的縱向力超過路面摩擦力所能提供的極值時,維持控制器的穩定。在側向摩 擦力控制部分,假設一個”Dugoff”反輪胎模型,並控制輪胎的轉向角度影響輪胎側滑角, 此時輪胎與路面間所產生的側向摩擦力和分配的側向力會因為輪胎模型的不確定性 (Model uncertainty)有誤差,這部分將由上層控制器的設計來補償。 在第二章相關研究中討論的其他控制器設計,大部分的控制器主要是著重於單一層 控制器架構的設計,計算出控制車輛跟隨參考值所需的側向合力和橫擺力矩總和,然後 直接控制車輪的轉角或者直接當作控制輸入控制車輛動態,但皆假設實際能夠產生所需 的合力與力矩,並沒有考慮到輪胎的動態,造成四輪轉向控制實際上在較大的車輛側向 加速度下會無法有效地作控制,控制的範圍受到限制;而直接橫擺力矩控制則是沒有利 用輪胎側向力來作控制,所以對車輛側向運動控制上會不夠準確。因此,本研究將控制 架構分為上、下層控制器:利用上層控制器跟隨車輛縱向速度、質心側滑角與橫擺角速
18 度參考值,透過最佳化分配將輪胎摩擦力圓的限制考慮進去,分配出四個輪胎所需之摩 擦力,在下層控制器中考慮輪胎動態,控制跟隨所需的摩擦力。在此控制架構下,改善 了四輪轉向在車輛側向加速度大時對車輛控制的不穩定問題,以及彌補了直接橫擺力矩 控制對車輛側向運動控制的不足。整個控制系統架構圖,如圖 4. 1。 上層控制器 最佳化輪 胎與路面 間摩擦力 分配 縱向摩擦力 回授穩健控 制器 輪胎側滑角 控制器 輪胎與路面間 縱向摩擦力估 測 駕駛者下達 轉向命令
Y
M
X
adi F bdi F mi T i
i
mi T ˆ a i F i , x, y r V V w i w ai mi I R F T cos max{ , cos } w i i i i w i i i R v R v 1 tan ( yi) i i xi v v 輪胎 模型 車輛 模型 ai F bi F i 即時適應性路 面摩擦力係數 估測ˆ
控制車輛 圖 4. 1 系統架構圖4.1 上層控制器
4.1.1 車輛參考模型
車輛參考模型是基於 Ellis[16]所提出的兩個自由度線性車輛響應,車速維持定速前 進,前輪轉向。車身側滑角(Slide-slip angle)與橫擺角速度(Yaw rate)對轉向角度 的響應 如(4.1)和(4.2)式。19
2 2 1 0 2 1 n n T s s G s s (4.1)
1 0 1 r e r s G t s (4.2) ;其中
2 2 1 2 0 , 1 f r r r l m V l l K l G AV l 2 2 1 , f r n z K K l AV V mI
2 2
2 , 2 (1 ) f f r r z f r z f r m l K l K I K K l mI K K AV 2 1 , 2 1 2 z f r r r r I V T l m ll K V l l K
2 1 0 , 1 r V G AV l 2 . 2 f f r r f r l K l K m A l K K 橫擺角速度響應近似為一階系統,是表示響應為中性轉向(Neutral steer)的特性, 為 響應時間[17]。 線性的參考車輛模型沒有考慮到輪胎特性之非線性的影響,所以當把非線性輪胎特 性考慮進去時,參考車輛的車身側滑角與橫擺角速度的極值都會受到物理限制影響[18]。 車體質心速度( )會影響車身側滑角極值限制,車身側滑角最大限制和車體質心速度 關係式,如(4.3)式,圖 4. 2。 2 max 10 7 2 (40 / ) CoG V m s (4.3) 側向加速度( ) 的極值限制則是會與路面摩擦力係數有關;理論上,車輛作轉向運 動最大可以產生 9.81 倍路面摩擦力係數大小的側向加速度,例如:路面摩擦力係數為 1 時,側向加速度極值可以為 9.81 ,而當車身側滑角不為零時,最大側向加速度則調 整為 8 ,故最大側向加速度與摩擦力係數關係可表示如(4.4)式。20 圖 4. 2 最大車身側滑角與質心速度關係圖[18] 2 max 8 / y s a m s (4.4) 利用(3.6)式, 與 的關係式可以得知橫擺角速度的最大值為(4.5)式。 max max y y x a r V V (4.5) 因此,車輛參考模型加入考慮車身側滑角與橫擺角速度物理限制,將車身側滑角與 橫擺角速度之參考值改成(4.6)與(4.7)式: max max , , ref otherwise (4.6) max max , , ref r r r r r otherwise (4.7) 在小角度轉向和較小的側向加速度運動下,參考車輛模型為兩個自由度線性車輛響 應;而在大角度轉向和較大的側向加速度下,參考車輛模型則將會受到物理限制於極 值。 縱向速度參考值部分,本論文假設為常數,其值由駕駛者油門踏板的角度來決定, 故設定 。 0 5 10 15 20 25 30 35 40 45 50 0 5 10 15 V CoG (m/s) m a x ( 。 )
21
4.1.2 車輛縱向速度、車身側滑角與橫擺角速度控制器
回顧(3.2)、(3.3)與(3.4)式,縱向、側向合力與橫擺力矩總和影響車輛縱向、側向與 橫擺角速度的動態,在上層控制器使用了順滑模態控制理論,設計了三個順滑平面 (Sliding surface),計算控制車輛跟隨參考車輛模型的響應所需的縱向、側向合力與橫擺 角轉動力矩總和。將(3.2)、(3.3)與(3.4)式重新表示如下: ( x y) m V rV X X (4.8) ( y x) m V rV Y Y (4.9) z I rM M (4.10) ; 、 和 為上層控制器輸入,計算出所需的縱向、側向合力與橫擺力矩總和; 、 和 為未知的變動量,來自於下層控制器控制後結果與上層控制器計算結果之間的誤差。假 設其變動範圍分別為: 、 以及 。 縱向速度控制,設計一順滑平面為 ,如(4.11)式。 0 X x xref S V V (4.11) 需滿足迫近條件(Approaching condition): 1 , 0 X X X X S S S whileS (4.12) ;其中 。 從(4.8)式移項整理可以得知
1 x y V X X rV m (4.13) 再將(4.13)代入(4.12)式:
1 1 x xref X y xref X X V V S X X rV V S S m (4.14)22 由前述式子,設計控制輸入 為
y xref
1
X X m rV V k sign S (4.15) ;其中 。 將(4.15)代入(4.14)式證明滿足迫近條件。
1 1 max 1 1 1 y xref X y xref X y xref X X X X X X X rV V S m k X rV V sign S rV V S m m k X sign S S m m X k S m m S (4.16) ;其中 。 相同地,車身側滑角控制與橫擺角速度控制,分別設計順滑平面: 和 ,如(4.17) 和(4.18)式。 0 Y ref S (4.17) 0 M ref S r r (4.18) 皆需滿足迫近條件: 2 , 0 Y Y Y Y S S S whileS (4.19) 3 , 0 M M M M S S S whileS (4.20) ;其中 、 。 縱向車速若近似於定速,則可將(4.9)式表示成
x mV r Y Y (4.21)23 移項整理得(4.22)式。
x Y Y r mV (4.22) 設計控制輸入 為
2 ( ) x ref Y Y mV r k sign S (4.23) ;其中 。 將(4.22)及(4.23)代入(4.19)式證明滿足迫近條件。
2 2 max 2 2 ref Y ref Y x ref Y ref Y x x Y Y x x Y x x Y S Y Y r S mV k Y r sign S r S mV mV k Y sign S S mV mV Y k S mV mV S (4.24) ;其中 。 橫擺角加速度則可從(4.10)式得知,如(4.25)式。
z M M r I (4.25) 控制輸入 設計為 3 ( ) z ref M M I r k sign S (4.26) ;其中 。24 將(4.25)及(4.26)代入(4.20)式證明滿足迫近條件。
3 3 3 max 3 ( ) ( ) ref M ref M z ref M ref M z z M M z z M z z M r r S M M r S I k M r sign S r S I I k M sign S S I I k M S I I S (4.27) ;其中 。 最後利用 Lyapunov 原理[14]來保證前述上層控制器之穩定性,選取 Lyapunov 函數 為 2 2 2 1 1 1 2 X 2 Y 2 M V S S S (4.28) 會大於等於零,且為一正定函數。接著,Lyapunov 函數對時間 做一次微分,可得
1 2 3 0 X X Y Y M M X Y M V S S S S S S S S S (4.29) 明顯地可得 ,且為一負定函數,故 為一個 Lyapunov 函數,系統為漸進穩定 (Asymptotically stable)。 在上層控制器之控制輸入 、 和 ,(4.15)、(4.23)和(4.26)式中皆使用了一個理想的 切換函數 ,此函數會使系統產生切跳(chattering)現象,為了改善此現象,將 用順滑層的概念來取代順滑面[19],以 來取代 ,如(4.30)式。
, , , , , , , , , , , , , , , , , , , , 1 , 1 X Y M X Y M X Y M X Y M X Y M X Y M X Y M X Y M X Y M X Y M S S sat S S S (4.30)25 因此,控制法被修正為
y xref
1
X, X
X m rV V k sat S (4.31)
2
,
x ref Y Y Y mV r k sat S (4.32)
3 , z ref M M M I r k sat S (4.33) 上述控制器在實現上會需要回授車輛縱向、側向速度、橫擺角速度以及質心側滑角。 實際可以利用全球定位系統(GPS)來判斷質心的位置與移動速度,橫擺角速度可以用陀 螺儀量測,而質心側滑角實際上無法用感測器量測得知,會需要借助估測的方法獲得, 像是利用卡爾曼濾波器(Kalman filter)估測[20]。本研究中將這些感測器可以提供的資訊 當作已知。4.2 最佳化輪胎與路面間摩擦力分配
4.2.1 成本函數
最佳化輪胎與路面間摩擦力分配的成本函數(Cost function)之設計與選擇是可以有 很多種形式,也很難明確地去說明如何選擇成本函數會是最有效率的輪胎摩擦力分配, 故本小節中並沒有探討不同成本函數選擇之優劣,而是使用輪胎摩擦力圓的概念設計 [21]。 輪胎與路面間縱向摩擦力與側向摩擦力之間有摩擦力圓關係存在,會受到路面摩擦 力係數( )乘以輪胎正向力( )影響其限制範圍,故會希望最佳化分配出的輪胎摩擦力能 夠在摩擦力圓限制內,且能夠是最小的控制輸入。因此,設計成本函數如(4.34)式。
0
2 2 4 2 1 xi yi i i z i F F J C F
(4.34)26 ;其中 和 即為所要分配的八個變數,四個輪胎平行車身與垂直車身之摩擦力; 為路面摩擦力係數,在本研究設計中皆假設為一般柏油路面狀況( ; 為 車輛等速直線行駛時四個輪胎的正向力,分別表示如下: 0 0 1,2 3,4 2 2 r z f z mgl F l mgl F l (4.35) 為權重參數(Weighting coefficient),適當的選定調整可以提高車輛控制的表現,參數 選定如下: 0 , 1 ~ 4 z i i zi F C i F (4.36) 為輪胎正向力,回顧(3.11)式,車輛縱向加速度及側向加速度會造成車體重量轉移。 故由(4.36)式 權重參數的選定,可以明顯地說明當某顆輪胎正向力因車體重量轉移變大 時,摩擦力圓關係限制變大,其權重變小,即意味著最佳化分配時分配的縱向力與側向 力可以分配得較大, 權重參數是隨著車輛動態作變動調整。 成本函數中的八個變數( 和 ),在假設四個輪子都可以獨立驅動與轉向的情
況下,必頇滿足的等式與不等式限制(Equality and inequality constraints)有:
分配出的四個輪胎平行車身之摩擦力的總和必頇和車輛縱向速度控制器計算出所 需的縱向合力( )相等。 1 2 3 4 x x x x F F F F X (4.37) 四個輪胎垂直車身之摩擦力的總和必頇和車身側滑角控制器計算出的側向合力( ) 相等。 1 2 3 4 y y y y F F F F Y (4.38) 由四個輪胎平行車身之摩擦力與垂直車身之摩擦力所產生的橫擺力矩和也必頇等 於車輛橫擺角速度控制器計算的橫擺力矩總和( )。 2 1 4 3 1 2 3 4 ( ) ( ) ( ) ( ) 2 2 f r x x x x f y y r y y t t F F F F l F F l F F M (4.39)
27 此外,每個輪胎所受之摩擦力也必頇要滿足摩擦力圓的限制,表示如下:
2 2 2 1 1 1 2 2 2 2 2 2 2 2 2 3 3 3 2 2 2 4 4 4 x y z x y z x y z x y z F F F F F F F F F F F F (4.40) 上述總共三條線性等式限制與四條非線性不等式限制,為了求解此非線性規劃問題, 將借助於卡羅需—庫恩—塔克條件(KKT condition)。4.2.2 最佳化問題求解
分析整理成本函數(4.34)式與其變數限制條件(4.37~40)式,目的是希望最小化成本 函數,表示成底下一般最佳化的求解問題: 0 2 2 2 1 1 2 1 2 2 2 2 3 4 2 2 2 2 3 5 6 3 2 2 2 4 7 8 4 1 1 3 5 7 2 2 4 6 8 3 3 1 7 5 2 4 1 ( ) ( ) 2 . . ( ) ( ) 0 ( ) ( ) 0 ( ) ( ) 0 ( ) ( ) 0 ( ) 0 ( ) 0 ( ) ( ) ( ) ( ) 2 2 T z z z z f r f minimize J f s t f x x F f x x F f x x F f x x F h x x x x X h x x x x Y t t h x x x x l x x x x Px x x x x x x x l xr( 6x8)M 0 (4.41) ; x
Fx1,Fy1,Fx2,Fy2,Fx3,Fy3,Fx4,Fy4
T28 0 ' 1 ' 1 ' 2 ' 2 ' 3 ' 3 ' 4 ' 4 ' 2 2 0 0 0 0 0 0 0 0 2 0 0 0 0 0 0 0 0 2 0 0 0 0 0 0 0 0 2 0 0 0 0 0 0 0 0 2 0 0 0 0 0 0 0 0 2 0 0 0 0 0 0 0 0 2 0 0 0 0 0 0 0 0 2 1,..., 4 ( ) i i z i C C C C C C C C C C i F P
明顯地,目標函數(Object function): 為一凸函數(Convex function),且受四條
非線性不等式( )與三條線性等式( )限制。三條線性等式限 制可以寫成 的型式,故可知此 為仿射函數(Affine function): 。 1 0 1 0 1 0 1 0 0 1 0 1 0 1 0 1 2 2 2 2 f f r r f f r r A t t t t l l l l X b Y M (4.42) 對於任何的最佳化問題,若目標函數與限制函數皆可微分,求得之最佳解必需滿足 KKT 條件。在目標函數為凸函數,且 也為凸函數, 為仿射函數下,若任何一 組解 、 、 滿足底下 KKT 條件,則 為此最佳化問題之最佳解。
0 1 1 ( ) 0 , 1,..., ( ) 0 , 1,..., 0 , 1,..., ( ) 0 , 1,..., 0 i i i i i m p i i i i i i f x i m h x i p i m f x i m f x f x h x
(4.43) ;在本小節的最佳化問題中, 、 。本研究中是利用原對偶內點法(Primal-dual interior-point method)來求解 KKT 條件 [15]。解出的一組最佳解即為分配出的四個輪胎平行車身與垂直車身之摩擦力,且會滿
29 足摩擦力圓的限制,再由(3.1)式關係轉換成平行胎面之縱向力與垂直胎面之側向力,然 後由下層控制器控制輪胎扭力和轉角產生此組最佳化分配結果。 此外,若有無法解出一組滿足 KKT 條件最佳解情況發生,將會是因為上層控制器 計算之所需縱向、側向合力與橫擺力矩總和,在四條輪胎摩擦力圓的不等式限制下無法 同時滿足,所以若以車輛行駛的安全性作為優先考量,會希望車輛能夠維持原有的橫擺 角速度與側向運動,故此時會將原本的三條等式限制保留剩下側向合力和橫擺力矩總和 兩條等式限制必需滿足,再作最佳化分配。
4.3 下層控制器
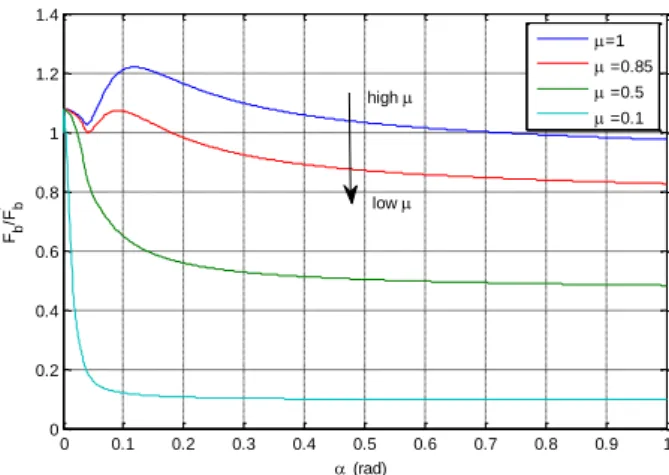
在 4.2 節最佳化輪胎與路面間摩擦力分配,分配出四個輪胎和路面間所應該產生的 縱向力與側向力,設計下層控制器控制輪胎的扭力或轉角,改變輪胎動態,使輪胎與路 面間產生此摩擦力分配之結果。 實際上控制車輛的輪胎模型是未知的,在第三章討論的”Magic formula”輪胎模型, 在本研究中是用以模擬當作真實的輪胎模型,而在下層控制器內則是假設另一非線性輪 胎模型:Dugoff‟s 輪胎模型[22],如(4.44)式,做為控制器內名義輪胎模型(Nominal tiremodel),因為 Dugoff‟s 輪胎模型包含較少的參數( 、 ),計算上亦比較容易,所以利 用此模型之線性及非線性的特性,於估測路面摩擦力係數、縱向力回授控制以及反輪胎 模型的輪胎側滑角計算。
' ' ' ' 1 tan 1 a x b y F C f F C f (4.44) ;
1 , 1 2 , 1 f 30
' 2 2 ' 2 2 1 2 tan z x y F C C ; 與 為輪胎縱向剛度(longitudinal stiffness)與轉向剛度(cornering stiffness); 指定
Dugoff‟s 輪胎模型的作用區間, 時,輪胎作用於線性區域。
4.3.1 縱向力估測
回顧(3.7)式,輪胎旋轉動態方程式,假設式中馬達與煞車施加的力矩和( )和輪胎 轉動角速度( )都可以獲得,將此式移項整理後,並將輪胎轉動半徑( )用未形變前的 輪胎半徑( )代入,可得(4.45)式。 mi w i ai i T I F r (4.45) ;其中轉動角加速度( )項,可以透過角速度項差分得知。 為此刻時間點的輪胎轉動 角速度, 前一刻時間點的輪胎轉動角速度, 為取樣時間,則輪胎轉動角加速度可以 用(4.46)式近似: i i i t (4.46) 再將(4.46)式代入(4.45)式即可得到縱向力估測方程式: ˆ i i mi w ai i T I t F r (4.47) 本研究中將會利用(4.47)式縱向力估測的結果,回授至下層縱向力控制器,控制輪 胎動態。4.3.2 縱向摩擦力回授穩健控制器
控制器中假設實際的輪胎模型縱向摩擦力為:Dugoff‟s 輪胎模型( )加上一未知項31 ( :Uncertainty term)。控制器目的是希望輪胎與路面間產生上層控制器分配期望之摩 擦力( ,故設計順滑模態控制器做縱向力軌跡跟隨控制,計算控制輸入馬達扭矩( , 控制輪胎的動態。 設計一順滑平面,如(4.48)式。 0 a a ad S F F (4.48) ;其中若 ,則會將 限制於 ,目的是希望跟隨的參考值 不會超過 最大縱向摩擦力 ,以避免平衡點不在順滑平面上; 為估測的路面摩擦力係數。 需滿足迫近條件(Approaching condition): 4 , 0 a a a a S S S while S (4.49) ;其中 。 回顧(4.44)式,Dugoff‟s 輪胎模型,將縱向力( )對時間 做一次微分:
' 2 ' ' ' 2 1 , 1 1 1 2 2 1 , 1 1 1 x a x x C F C C (4.50) 計算如(4.51)式。
' 2 ' 2 2 ' 2 ' 2 2 2 tan sec 1 1 tan x y z z x y C C F sign F C C (4.51) 將(4.51)式代入(4.50)式,重新整理為
' 2 ' 2 2 ' ' ' 2 2 ' 2 2 ' 2 2 ' ' 2 2 ' 2 2 1 , 1 1 2 1 2 1 2 1 1 1 tan tan sec 2 1 , 1 1 tan x x a x x y y z x z x y C C F C C C C F C F C C (4.52)32 再將(4.52)式整理表示為 ' ' ' 0 a F g g (4.53) ; 為 對 偏微,且 ' ' 2 ' 0 ' ' 2 2 ' ' 2 2 ' 2 2 ' ' ' 2 2 ' 2 2 ' ' 0 1: 0, (1 ) 0 1: 2(1 ) 2 (1 ) 2 1 1 1 tan 2 2(1 )( 1) 1 1 1 1 1 0, (1 ) tan sec 2 (1 )( 1 x x x x y x x x y z x z C g g C C g C C C C C C F g C F ' 2 2 ' 2 2 ) tan x y C C (4.54) 故可以將先前假設實際的輪胎模型縱向摩擦力對時間 做一次微分表示為(4.55)式。
' *
' 0 a F g g g (4.55) ; 假設為未知項對 偏微的結果。 當車輪在加速時( ),將(3.8)式對時間 做一次微分,且利用輪胎旋轉動態方程式 (3.7)得
2cos sin cos ( )
( )
cos sin cos
(1 ) cos sin (1 ) ( ) (1 ) (1 ) i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i i mi i ai i w i i i i i ai mi ai w i w i i i r v v v r r v v r v r r v v T r F I r r v T F I I r (4.56)
![圖 2. 5 DYC 控制系統方塊圖,擷取自 [9 ]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8472763.183602/22.892.255.719.111.371/圖25DYC控制系統方塊圖擷取自9.webp)
![表 5. 3 兩種 DYC 控制型式之權重因子值 [12 ] 模擬五: 車輛以初速 直線前進,2 秒時駕駛者下達進行車輪轉向角為 10 度的 J-turn 命令,且 維持等速,路面狀況模擬在一般柏油路( )。 圖 5](https://thumb-ap.123doks.com/thumbv2/9libinfo/8472763.183602/74.892.125.808.147.271/以初直線前進秒時駕駛下達進行車輪轉向角為維持等速路面在一般柏.webp)
