國
立
交
通
大
學
電機與控制工程學系
碩
士
論
文
積分順滑模控制技術在可靠度控制上之研究
Study of Reliable Control via Integral Sliding Mode
Control Approach
研 究 生:丁立偉
指導教授:梁耀文 博士
積分順滑模控制技術在可靠度控制上之研究
Study of Reliable Control via Integral Sliding Mode
Control Approach
研 究 生:丁立偉 Student:Li-Wei Ting
指導教授:梁耀文 博士 Advisor:Dr. Yew-Wen Liang
國 立 交 通 大 學
電機與控制工程學系
碩 士 論 文
A Thesis
Submitted to Department of Electrical and Control Engineering College of Electrical Engineering and Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical and Control Engineering July 2009
Hsinchu, Taiwan, Republic of China
積分順滑模控制技術在可靠度控制上之研究
中文摘要
學生:丁立偉 指導教授:梁耀文 博士
國立交通大學電機與控制工程學系碩士班
摘 要
本論文探討積分順滑模控制(Integral Sliding Mode)在可靠度控制
上的應用。傳統順滑模控制對於外在干擾和系統不確定項有著穩健性
的特性。而積分式順滑模控制因為一開始系統就在順滑面上,所以比
起傳統順滑模控制有著更高的穩健性。除此之外,積分順滑模控制方
式能依設計者的性能要求,結合諸如 LQR(linear quadratic regulator)
的最佳控制技術來提升系統的性能表現。本論文也驗證了這些特性也
可以成功地運用在可靠度控制的議題。模擬結果用衛星姿態控制來做
驗證。
Study of Reliable Control via Integral Sliding Mode
Control Approach
英文摘要
Student:Li-Wei Ting Advisor:Dr. Yew-Wen Liang
Department of Electrical and Control Engineering
National Chiao Tung University
ABSTRACT
This paper studies the robust reliable control issues base on integral
sliding mode control approach. Integral sliding mode control is known to
have better robustness than conventional sliding mode control, because
integral sliding mode eliminates the reaching phase. Moreover, integral
sliding mode control can combine with optimal strategy, such as linear
quadratic regulator (LQR) approach, depending on engineer’s
requirement to improve system performances. This nice property is
extended in this paper to reliable control issues. Simulation results
demonstrate the effectiveness of the proposed scheme by the attitude
control of a spacecraft.
誌謝
感謝許多人的關心與協助,使本論文能夠順利完成。首先特別要
感謝指導教授梁耀文博士,感謝老師兩年來細心與耐心的指導及對我
孜孜不倦的教誨,使我不僅在研究過程中受益良多,且在待人處世各
方面有許多的成長。同時也要感謝口試委員廖德誠博士、鄭治中博士
和徐聖棟博士給予建設性的建議與指導,使得本論文更臻完備。
接下來,要感謝實驗室的學長丞昶以及同學士昕和家榮,在我兩
年的研究生涯中,給予適時的意見與幫助。謝謝學長學弟、同學及室
友們,因為你們使我的研究生涯變得更多采多姿充滿回憶,謝謝你們
的關懷與照顧,沒有你們的幫忙論文不可能順利完成。
最後要感謝我最愛的家人,父親、母親、姊姊與哥哥,由於你們
的大力支持與鼓勵,使我在求學過程中無後顧之憂,使我能更能專心
在學業上衝刺,謝謝你們,謹將此論文獻給你們。
目錄
中文摘要...i 英文摘要...ii 誌謝... iii 目錄...iv 圖目錄...vi 表目錄... viii 第 1 章 緒論...1 1.1 研究背景與動機...1 1.2 論文架構...3 第 2 章 預備知識...4 2.1 傳統順滑模控制器之設計...4 2.2 積分順滑模控制器之設計...6 2.3 非線性 LQR 控制器之設計...8 第 3 章 積分順滑模控制在衛星姿態穩健性控制上之應用...11 3.1 問題描述...12 3.2 控制律設計...13 3.2.1 積分順滑模控制...13 3.2.2 傳統順滑模控制...15 3.2.3 非線性 LQR 控制...17 3.3 衛星姿態穩健控制之模擬...18 3.3.1 衛星動態...18 3.3.2 模擬結果...21 第 4 章 積分順滑模控制在可靠度控制問題上之研究...31 4.1 問題描述...324.2 主動式可靠度控制律設計...33 4.2.1 積分順滑模可靠度控制...33 4.2.2 傳統順滑模可靠度控制...36 4.2.3 非線性 LQR 可靠度控制...37 4.3 在衛星姿態控制上之應用...38 4.3.1 錯誤偵測與診斷觀察器設計...38 4.3.2 模擬結果...40 第 5 章 結論與未來研究方向...54 5.1 結論...54 5.2 未來研究方向...55 參考文獻...56
圖目錄
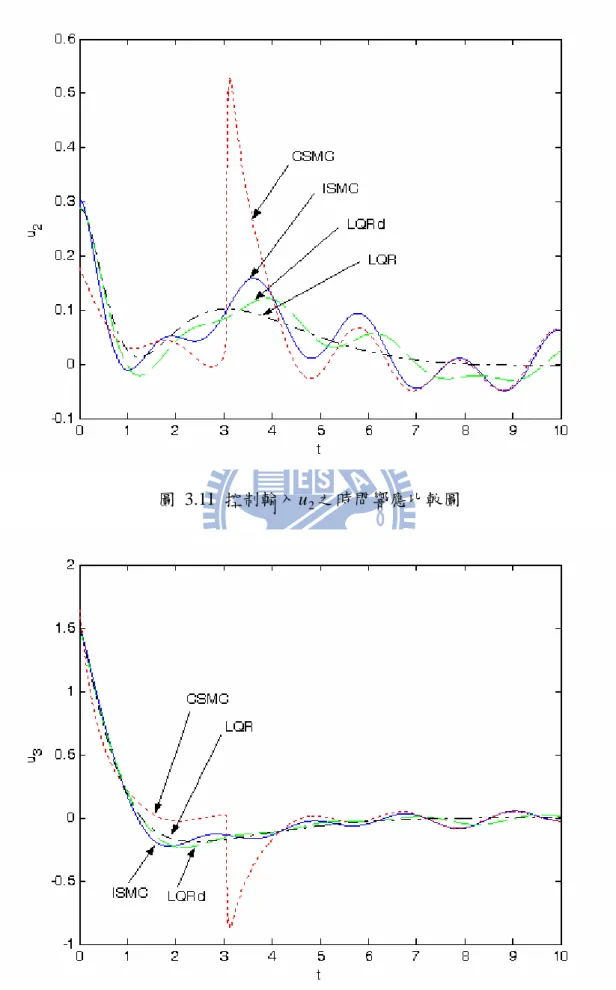
圖 2.1 順滑模式示意圖...4 圖 3.1 狀態變數x1之時間響應比較圖 ...24 圖 3.2 狀態變數x2之時間響應比較圖...24 圖 3.3 狀態變數x 之時間響應比較圖...25 3 圖 3.4 狀態變數x4之時間響應比較圖...25 圖 3.5 狀態變數x 之時間響應比較圖...26 5 圖 3.6 狀態變數x 之時間響應比較圖...26 6 圖 3.7 順滑函數s1之時間響應比較圖...27 圖 3.8 順滑函數s2之時間響應比較圖...27 圖 3.9 順滑函數s 之時間響應比較圖 ...28 3 圖 3.10 控制輸入u1之時間響應比較圖 ...28 圖 3.11 控制輸入u2之時間響應比較圖 ...29 圖 3.12 控制輸入u 之時間響應比較圖...29 3 圖 3.13 控制輸入u4之時間響應比較圖...30 圖 4.1 錯誤偵測與診斷示意圖...40 圖 4.2 u2在 1s 時發生故障,狀態變數x1之時間響應比較圖 ...44 圖 4.3 u2在 1s 時發生故障,狀態變數x2之時間響應比較圖...44 圖 4.4 u2在 1s 時發生故障,狀態變數x 之時間響應比較圖...45 3 圖 4.5 u2在 1s 時發生故障,狀態變數x4之時間響應比較圖...45 圖 4.6 u2在 1s 時發生故障,狀態變數x 之時間響應比較圖...46 5 圖 4.7 u2在 1s 時發生故障,狀態變數x 之時間響應比較圖...46 6 圖 4.8 u2在 1s 時發生故障,順滑函數s1之時間響應比較圖 ...47 圖 4.9 u2在 1s 時發生故障,順滑函數s2之時間響應比較圖 ...47 圖 4.10 u2在 1s 時發生故障,順滑函數s 之時間響應比較圖 ...48 3圖 4.11 u2在 1s 時發生故障,控制輸入u1之時間響應比較圖 ...48 圖 4.12 u2在 1s 時發生故障,控制輸入u2之時間響應比較圖...49 圖 4.13 u2在 1s 時發生故障,控制輸入u 之時間響應比較圖...49 3 圖 4.14 u2在 1s 時發生故障,控制輸入u4之時間響應比較圖...50 圖 4.15 u2在 1s 時發生故障,殘留訊號r1之時間響應比較圖 ...50 圖 4.16 u2在 1s 時發生故障,殘留訊號r2之時間響應比較圖 ...51 圖 4.17 u2在 1s 時發生故障,殘留訊號r 之時間響應比較圖...51 3 圖 4.18 u2在 1s 時發生故障,警報訊號alarm1之時間響應比較圖 ...52 圖 4.19 u2在 1s 時發生故障,警報訊號alarm2之時間響應比較圖 ...52 圖 4.20 u2在 1s 時發生故障,警報訊號alarm3之時間響應比較圖...53
表目錄
表 3.1 效能比較表...30 表 4.1 效能比較表...53
第1章
緒論
1.1 研究背景與動機
現代化工程技術已發展為規模大且複雜的整合系統,而這類系統若是部分零 件發生故障時沒有得到及時的維護和修理,可能造成人員及財產的巨大損失。例 如:2003 年 2 月所發生的美國哥倫比亞(Columbia)號太空梭返航解體事故,就造 成了 7 名優秀的太空科學家身亡,而事故的總成本包括調查取證和殘骸搜救等共 花費 130 億美元,如此重大的損失也讓美國思考如何設計出更加安全的太空飛行 器,目前也正在研發新一代的太空船。由此可見得可靠度控制的研究就顥得相當 的重要及熱門。可靠度控制的目的就是設計一個適當的就是設計一個適當的控制 器使得閉迴路系統可以容忍某些特定的控制元件發生故障時還能保持整個系統 的穩定度及可接受的性能。控制元件故障的情況可能會有放大(amplification)、衰 減(degeneration)、或者是完全故障。一般來說,可靠度控制器的設計可以分為主 動式[1]-[3]與被動式[4]-[6]兩種。在主動式可靠度控制系統中,故障是藉由錯誤 偵測與診斷機制(Fault Detection and Diagnosis,FDD)來辨別故障的部分及程度, 然後再根據這些資料來進行即時的控制律重組動作。另一個被動式的方法是系統 利用冗餘(inherent redundancy)來設計一個固定的控制律使得閉迴路系統無論在 正常情況下或者是控制元件故障的情況下都能達到可接受的性能。二者方式相較 之下被動式的方法在運作時不需要考慮故障是否發生來改變控制律,而主動式的 方法則需要一些反應時間等待 FDD 發現故障後再重組控制律。不過被動式的方法必須先根據統計和經驗來假定可能會發生故障的控制器部分,如果實際發生故 障的部分與事先的假定的不同,那麼此控制方式可能就無法完成我們所要達到的 目標。在這裡我們將考慮主動式的設計方式。
在現今可靠度控制的研究中,有很多的控制方式已經被提出。例如:基於 LMI(linear matrix inequality)的方法[6]、基於 ARE(algebraic Riccatti equation)的方 法[7],[8]、基於 H-J(Hamilton-Jacobi)的方法[4],[9]、基於順滑模控制(sliding mode control,SMC)的方法[10]-[12]。在上述所提到的方法之中,只有 H-J 方法和 SMC 方法是處理有關非線性系統的可靠度問題。在 H-J 方法中,由於要針對二次成本 函數(quadratic cost function)設計出最佳的控制律,必須求解 Hamilton -Jacobi 方 程式。一般來說,要解 Hamilton-Jacobi 方程式都需要經過複雜的計算過程;不 過利用冪級數(power series)方法[13],我們可以得到 Hamilton-Jacobi 方程式的近 似解,減輕 H-J 方法的困難。不過,雖然 H-J 方法解決了可靠度的問題,但是此 方法並沒有考慮穩健性的問題,若是當系統存在不確定性(uncertainty)或是外在 干擾(external disturbance)時,系統可能會受到影響而無法穩定。另一方面,SMC 方法不僅可以解決可靠度的問題,而且還有著容忍系統不確定性或是外在干擾的 穩健性以及容易設計等優點。但是相對地,SMC 方法沒有如同 H-J 方法一樣考 慮特定的二次成本函數來設計對應的最佳控制律,所以若考慮相同的二次成本函 數,H-J 方法所需的成本會比 SMC 方法的成本要少。 在 SMC 方法的設計流程中,其中很重要的一環是順滑面(sliding surface)的 選取,而一般常用的都是選取線性順滑面的設計方式。近年來,有研究學者提出 了以非線性積分式順滑面(nonlinear integral-type sliding surface)為主的積分順滑 模控制(integral sliding mode control,ISMC)方法[14]-[18]。為了以示區別,用線 性順滑面的 SMC 方法在這裡稱為傳統順滑模控制(conventional sliding mode control,CSMC)方法。積分順滑模控制被大家所應用,主要是因為它與傳統的比 較起來多了幾項好處:一個是積分順滑模控制少了一開始要到達順滑面的過程, 此過程稱為到達階段(reaching phase),使得系統一開始就可以處在順滑模式
(sliding mode)下。由於在系統要到達順滑面的過程中,一般是依靠高增益的回溯 控制來提升穩健性,因此比較起來積分順滑模控制有更好的穩健特性[14],[15]; 另一個則是積分順滑模控制多了一個設計的自由度,而這個自由度就是用來讓我 們 設 計 無 干 擾 系 統 (nominal system) 的 控 制 律 , 稱 作 無 干 擾 控 制 (nominal control)[15],[16]。所謂的無干擾系統就是原始系統中不考慮系統不確定性或是 外在干擾這些因素的系統,而此系統在無干擾控制下的狀態變化軌跡為無干擾軌 跡(nominal trajectory)。積分順滑模控制的另一項特點就是使原始系統狀態追蹤此 無干擾軌跡,有研究者應用此特性提出了次最佳化(suboptimal)控制方式[17]。在 這裡我們將運用上述積分順滑模控制的這些特性,推廣到可靠度控制的問題上; 以基於 H-J 方法的 LQR(linear quadratic regulator)設計作為無干擾控制,來減輕二 次成本函數的花費的同時,另外還能達到比傳統順滑模控制更好的穩健性。
1.2 論文架構
本論文架構如下:第二章將會介紹傳統順滑模控制理論和積分順滑模控制理 論。第三章先用衛星姿態控制系統為例子,比較積分順滑模控制、傳統順滑模控 制和非線性 LQR 控制的這三種控制方式的穩健性以及二次成本函數的花費多 寡,來驗證積分順滑模控制的優點。第四章將積分順滑模控制推廣到可靠度控制 的問題,同時我們以傳統順滑模可靠度控制和非線性 LQR 可靠度控制這兩者作 為與積分順滑模可靠度控制比較的對象;同樣是針對衛星姿態控制系統,比較它 們三個控制方式的穩健性與二次成本函數之花費,與第三章的結果做對照,來驗 證積分順滑模可靠度控制是否保有原來的特性及優點。第五章提出結論與未來研 究方向。第2章
預備知識
2.1 傳統順滑模控制器之設計
順滑模控制(sliding mode control,SMC)的特點在於利用不連續的控制輸入, 使系統最後會被限制在一個預先決定的順滑面(sliding surface)上,而受控系統的 行為則是由順滑面來規範。當順滑函數為 0,狀態軌跡沿著順滑面滑行的運動方 式稱為順滑模式(sliding mode),示意圖如圖 2.1: 順滑函數s = 0 x(0) 順滑面 順滑模式 圖 2.1 順滑模式示意圖
一般來說,傳統順滑模控制(conventional sliding mode control,CSMC)的順 滑面多半設計成線性的順滑函數,而系統在順滑面上時的動態階數則會比原始系
統階數要少,因此也減輕了設計的複雜度。總而言之,傳統順滑模控制器的設計 主要分成二個步驟[19]-[22];首先是選取適當的順滑面,當系統狀態維持在此順 滑面上時會產生我們所要的表現;第二個是決定控制律使系統能在有限時間內到 達順滑面並且維持在順滑面上,下面主要就是說明此控制律的設計。我們考慮一 非線性動態系統如下:
( )
x G( )
x u d f x& = + ⋅ + (2.1) 其中 ∈ℜn x 為狀態變數,u∈ℜm為控制輸入,f( )
x ∈ℜn以及( )
∈ℜn×m x G 為平滑 函數,d為系統不確定性(uncertainty)或外在干擾(external disturbance)所造成的擾 動(perturbation)。另外我們定義順滑面為:( )
x M x 0 s = ⋅ = (2.2) 其中 ∈ℜm×n M 為常數,且MG( )
x 在所有狀態下均為可逆(invertible)。然後我們考 慮設計控制律 eq u 和ure,其功用分別為使系統狀態維持在順滑平面以及在有限時 間 內 使 系 統 狀 態 到 達 順 滑 面 , 而 其 對 應 的 條 件 則 分 別 為 s&( )
x =0 和( ) ( )
x sx s sT & <−η ,η >0。設計 eq u 時先不考慮系統擾動的因素,令 eq u u= ,由(2.1) 和 (2.2) 可 得 到 s&( )
x =M⋅x& =Mf( )
x +MG( )
xueq =0 , 因 此( )
(
MG x)
Mf( )
x ueq =− −1 。 然 後 我 們 再 將 系 統 擾 動 的 因 素 考 慮 進 去 , 假 設 σ ≤ Md ,σ >0。令 eq re u u u= + ,由(2.1)和(2.2)可得到( ) ( )
( )
( ) ( )
( )
( )
(
)
( )
( )
( )
( )
( )
( )
( )
( )
xMG( )
xu s( )
x s Md x s u x MG x s Md x s u x MG x s Md x s u u x MG x s x Mf x s x M x s x s x s T re T T re T T re T T re eq T T T T σ + ≤ ⋅ + ≤ + = + + + = = & & , 設 計 ure =−(
MG( )
x) (
−1η+σ)
sgn( )
s( )
x , 代 入 上 式 後 可 以 得 到( ) ( )
x sx s( )(
x)
sgn( )
s( )
x s( )
x s( )
x sT & ≤− T η+σ +σ T ≤−η T .因此最後完整的控制律為 eq u 和 re u 的總和:
( )
(
MG x)
[
Mf( ) (
x)
sgn( )
s( )
x]
u u u= eq + re =− −1 + η+σ (2.3)2.2 積分順滑模控制器之設計
積分順滑模控制(integral sliding mode control,ISMC)的概念與傳統順滑模控 制類似,唯一的差別在於順滑面的選取改成了積分的型式。這個改變使得積分順 滑模控制少了系統狀態要到達順滑面的這一個過程;也就是說系統一開始就會處 於順滑模式。而當系統維持在順滑模式時,系統的軌跡是由所謂的無干擾系統 (nominal system)所決定的,在這裡我們可以選擇其他的控制方式對無干擾系統作 控制;不過由於無干擾系統與原始系統差別只在於系統擾動的有無,所以它們的 動態階數是相同的,這一點跟傳統設計方式的順滑模式情況有所不同。下面簡單 說明順滑模式的情況以及如何設計控制律使系統維持順滑模式,考慮一非線性動 態系統如下:
( )
x G( )
x u d f x& = + ⋅ + (2.4) 其中 ∈ℜn x 為狀態變數,u∈ℜm為控制輸入,f( )
x ∈ℜn以及( )
∈ℜn×m x G 為平滑 函數,d為系統不確定性或外在干擾所造成的擾動。在這裡我們假設d符合匹配 條件(matching condition),所以可將(2.4)改寫為:( )
x G( ) (
x u dm)
f x& = + ⋅ + . (2.5)其中dm =G+
( )
x ⋅d ,G+( )
x 為G( )
x 的準反矩陣(pseudo inverse matrix),而且m m ≤ρ
1 0 u u u= + (2.6) 其中u 是對無干擾系統,0 x& =f
( )
x +G( )
x ⋅u,所設計的控制律。u1是一個不連續 的控制律用來抵消系統擾動使系統維持在順滑面上,設計成( )
[
]
( )
[
]
⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎨ ⎧ ≠ ⋅ − = = 0 s s x DG s x DG 0 s 0 u if , if , 1 T T ρ (2.7) 其中ρ >ρm。且順滑面定義為(
f x G x u)
0 x x D x s( , )= ⋅[ ( )− ( )−∫ ( ( ))+ ( ( ))⋅ ( ) ⋅ ]= 0 0 0 t t d t t t τ τ τ τ (2.8) 其中t 為初始時間,0 D∈ℜm×n,而且對所有狀態而言,DG(x)為滿秩。在這裡 我們可以發現在任何狀態下s(x,t0)=0,所以系統一開始一定會是順滑模式。另 一方面,當系統維持順滑模式時,我們知道對應的情況為s(x,t)=s&(x,t)=0。下 面 為 了 精 簡 式 子 , 會 將 一 些 符 號 省 略 。 由 (2.5) 和 (2.8) , 可 以 得 到(
)
[
x f Gu0]
D[
(
f Gu Gd) (
f Gu0)
]
DG(
u d u0)
D s&= ⋅ &− + = ⋅ + + m − + = ⋅ + m − . 所以當系統維持順滑模式時,對應的控制律應為u=u0 −dm,代入(2.5)可以知道 此時的系統動態為x& =f( )
x +G( )
x ⋅u0,說明了順滑模式下的狀態軌跡會跟無干擾 系統在無干擾控制(nominal control)下的軌跡相同。 了解了積分順滑面的特點之後,接著證明u1能使系統維持在順滑面上。當 0 s≠ ,我們選擇李雅普諾夫函數(Lyapunov function)為V sTs 2 1 = ,微分之後由(2.5) 和(2.8),控制律代入(2.6)、(2.7)可以得到(
)
( )
( )
( )
( )
(
) ( )
0 0 < ⋅ + − ≤ ⋅ + ⋅ − ≤ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ + ⋅ − ⋅ = − + ⋅ = = s DG s DG d s DG d s DG s DG DG s u d u DG s s s T m T m T m T T T m T T V ρ ρ ρ ρ & &因為DG為滿秩而且s(x,t0)=0,所以控制律(2.6)、(2.7)可以保證維持順滑模式 0 s= ,∀t∈
[
t0,∞)
。2.3 非線性 LQR 控制器之設計
考慮一非線性動態系統如下:( )
x G( )
x u f x& = + ⋅ (2.9) 其中 ∈ℜn x 為狀態變數,u∈ℜm為控制輸入,f( )
x ∈ℜn以及( )
∈ℜn×m x G 為平滑 函數。LQR 控制器的設計目的是使系統穩定並且同時使二次成本函數(quadratic cost function)(
)
dt J =∫0∞ xTQx+uTRu ⋅ (2.10) 降到最少,其中Q≥0,R>0皆為常數矩陣。根據[9],一個最佳狀態回溯控制 律為下:( ) ( )
x V x G R u 1 T xT 2 1 − − = (2.11) 其中列向量Vx( )
x 符合下面 H-J 等式:( ) ( )
( ) ( )
( ) ( )
0 4 1 = + − − Qx x x V x G R x G x V x f x Vx x 1 T xT T . (2.12) 接著為了求得 H-J 等式的近似解,我們會對Vx( )
x 和(2.12)式作泰勒級數展開(Taylor’s series expansion),再從二階的部分開始求解Vx
( )
x ;得到二階部分的解後,利用這個結果接著求解三階部分的解,下面依此類推。然後先說明[13]中所 用 到 的 一 些 符 號 。 row
( )
⋅ 代 表 從ℜn×m 映 射 到 ℜ1×nm 的 運 算 符 號 , 亦 即( ) (
A : a ,L,am,a ,L,an ,Lanm)
row = 11 1 21 1 , 而( )
n m ij a A= ∈ℜ × ; 還 有 x(0) :=1 ,x x x(m) := (m− )1 ⊗ ,m為任一正整數,⊗代表克羅內克積(Kronecker product); 1 : ] 0 [ = x ,x[1]:=x, [k] x 是將 (k) x 中有重複的部分去除之後的向量。很明顯地, k n k)∈ℜ ( x , [k]∈ℜCkn+k−1 x ,而 )! ( ! ! : k n k n Ckn − = ,n!=n⋅(n−1)L2⋅1。而 M 和N 分別定義為符合 [ ] (k) k k M x x = 以及 ( ) [k] k k N x x = 的矩陣。另外,我們對f(x 作泰) 勒級數展開為 =∑∞=1 () ) i Aix i f(x 。這裡假設我們要對Vx
( )
x 求解到N階的近似解, 下面說明如何以遞迴的方式求求解: 步驟 1: 從( )
( )
2 0 2 1 2 1 2 1 2 2 1 + − + = − Q S x G R x G S A S S AT T 中解出S2,然後令k =3,跳到步 驟 2。 步驟 2: ∑ = l+m=k+1;l,m≥2row( l m) k S A E( )
( )
⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ > ∑ ⎢⎣⎡∑ ⊗ − ⊗ ⎥⎦⎤ = = ≥ + = + = − − ) − if 3 2 1 ( 3 if 0 3 , ; 2 1 ) 1 ( 1 ) 1 ( k S x G R x G M P k Z m l k m l li i n T m T i n l l k I I k k k k E Z N V ) 2 1 ( + − =( )
( )
k k i i k n T i n k k M A G x R G x S N U = ∑=1 (−1) ⊗ 1− −1 2)⊗ ( −) 2 1 ( I I k k k V U P = / For i=1,L,k 將 nk k kM P ∈ℜ1× 區分成 i n 相同大小的區塊,也就是每個區塊的維度為 k i n − × 1 令P 是mn PkMk中的第m+ n6( −1)個區塊 定義Pki =(Pmn)∈ℜn×nk−1 endT k i i k k P S =∑=1( ) if k = N +1,跳到步驟 3 else k = k+1,跳回到步驟 2。 步驟 3:
( )
=∑∞ =2 − − ] 1 [ 1 k k k T k T x S N x V x 。 將步驟 3 最後所得到的VT( )
x 代入(2.11)中,就是最後的最佳控制律之近似值。第3章
積分順滑模控制在衛星姿態穩健性控制上之應
用
傳統順滑模控制由於能夠有效地消除系統擾動使系統穩定,加上有著容易實 現設計的特性;因此常被大家用來處理系統穩健性的問題。雖然傳統順滑模控制 能夠有效地達到穩健控制的目的,但是它在節省二次成本花費的問題上並沒有太 多著墨。非線性 LQR 控制是一種能使二次成本花費降低的最佳化控制,但是這 種控制方式對於系統擾動並不具穩健性。為了能夠使系統不受擾動影響,同時也 希望能夠達到比較好的效能,我們採用積分順滑模控制。積分順滑模控制有幾項 優點是我們採用這種設計方式的理由;一個是它能一開始就使狀態處於順滑模 上 , 比 起 傳 統 順 滑 模 控 制 更 具 有 穩 健 性 ; 另 一 個 是 當 系 統 擾 動 為 匹 配 式 (matched-type)時,狀態軌跡會與無干擾系統軌跡一樣,而這個軌跡也是可以根據 我們的需求來做設計,在這裡我們使用非線性 LQR 控制作為控制無干擾系統的 控制律,希望能夠借此減少二次成本函數的花費。 在這一章中在 3.1 節我們定義所探討的系統為非線性二階系統,還有二次成 本函數的形式以及控制目的。然後 3.2 節簡述針對此二階系統,使用第 2 章中所 提到三種控制律的設計方式。接下來 3.3 節會以衛星姿態控制的模型為例子來模 擬,並討論分析三種控制律的模擬結果,加以驗證順滑模控制的一些特性。3.1 問題描述
考慮一個非線性二階微分方程如下:( )
( )
⎩ ⎨ ⎧ + ⋅ + = = d u x G x f x x x 2 2 1 & & (3.1) 其中 ∈ℜn 1 x , ∈ℜn 2 x ,(
T T)
T 2n 2 1, ∈ℜ = x x x 代表系統狀態, ∈ℜm u 為控制輸入 且m≥ ,n d∈ℜn 代 表 可 能 的 系 統 不 確 定 項 或 是 外 在 干 擾 所 產 生 的 擾 動 ,( )
∈ℜn x f 以及( )
∈ℜn×m x G 為平滑函數且f(0)=0, T ) (⋅ 代表矩陣或向量的轉置。 在此我們必須先提出一個假設以方便後續控制律的推導。 假設 3.1:對所有的狀態而言,G( )
x 為滿秩(full rank)矩陣。 另外在此我們定義二次成本函數為:(
)
dt J =∫0∞ xTQx+uTRu (3.2) 其中 ∈ℜn×n Q ,R∈ℜm×m。 本章主要目的為比較三種控制律在面對外在干擾與系統不確定項這些系統 擾動時是否能達到穩定的目的,同時以二次成本函數(3.2)作為指標來考慮效能比 較。下面提到的函式為了表示上的方便,我們會省略一些在函式裡的變數。3.2 控制律設計
3.2.1 積分順滑模控制
根據第 2 章所述積分順滑模控制的設計程序,首先我們需要二個假設 假設 3.2:存在一非負函數ρm( )
x,t (底下簡稱ρm)使以下不等式成立 m m ≤ρ d (3.3)其中dm =G+⋅d,G+代表G的準反矩陣(pseudo inverse matrix)。
假設 3.3:對於原始非線性系統(3.1)的無干擾系統,亦即 ⎩ ⎨ ⎧ + = = Gu f x x x 2 2 1 (3.4) 存在一控制律u=u0
( )
x (底下簡稱u0)能使系統(3.4)全域漸進穩定。 有了假設 3.2 和假設 3.3 之後,設計的控制律主要分為二部分 1 0 u u u= + (3.5) 0 u 是針對系統(3.4)的控制律;u 的選擇視個人需求而定,一般來說會使用最佳0 化控制的設計方式,在這裡我們u 是選用非線性0 LQR 的控制律。而u1為一非連 續控制律;u1是負責抵消擾動使系統保持在順滑面的狀態上。根據積分順滑模 控制的設計方式[15],[16],順滑面的選取原本會定為(
)
(
)
(
( ) ( ) ( ))
] ) ( ) ( [ ) , ( 0 0 0 −∫ + ⋅ ⋅ − ⋅ = t t d t t t D x x f xτ G xτ u τ τ x s (3.6)其 中
(
T T)
T 2 1, x x x= , ∈ℜm 2× n D ,( )
(
T T( )
)
T t t t) ( ), ( ) ( x2 f x x f = ,( )
(
T( )
)
T n m t t) , ( ) ( 0 G x x G = × ,不失一般性我們可以令D=(D1,D), ∈ℜm×n 1 D , n m× ℜ ∈ D ,我們可以發現D⋅G( )
x(t) =D⋅G( )
x(t) 。另一方面,我們考慮對(3.6) 做微分,可以得到(
)
( )
( )
(
) (
) (
)
(
) (
)
)]. ( )) ( ( )) ( ( ) ( [ )] ( )) ( ( , )) ( ( ) ( , [ )] ( )) ( ( , )) ( ( ), ( ) ( ), ( [ )] ( ) ( ) ( ) ( ), ( [ ) , ( 0 2 0 2 1 0 2 2 2 0 2 1 t t t t t t t t t t t t t t t t t t t t T T n m T T T n T T n m T T T T T T T T T u x G x f x D u x G 0 x f x 0 D u x G 0 x f x x x D u x G x f x x D x s ⋅ − − ⋅ = ⋅ − − ⋅ = ⋅ − − ⋅ = ⋅ − − ⋅ = × × × & & & & & & 所以在這裡我們所選取的順滑面就簡化為(
f x G x u)
0 x x D x s( , )= ⋅[ ( )− ( )−∫ ( ( ))+ ( ( ))⋅ ( ) ⋅ ]= 0 0 0 2 2 t t d t t t τ τ τ τ (3.7) 其中對所有狀態而言,DG(x)為滿秩。當系統處於順滑模式下時,s=0,s&=0。 由(3.1)和(3.7)式可以得到(
)
[
x f Gu]
D[
f Gu d(
f Gu)
]
D(
Gu d Gu)
0 D s&= ⋅ &2 − + 0 = ⋅ + + − + 0 = ⋅ + − 0 = . 此時系統對應的控制律應為u=−G+⋅(
d+Gu0)
,再代入原始系統(3.1)後,可以 證明與無干擾系統(3.4)相同。 第二部分的控制律u1需要分二種情況討論;一是當s=0時,u1不需作用, 所以u1 =0;二是當s≠0時,u1要能使順滑函數保持為s=0,所以令 s DG s DG u T T ) ( ) ( 1 =−ρ (3.8) 其中ρ >ρm。我們選取李雅普諾夫函數為V sTs 2 1 = ,微分之後代入(3.5)、(3.7) 和(3.8)可知(
)
(
)
(
)
( ) 0. ) ( ) ( 0 1 0 0 < ⋅ + − ≤ ⋅ + ⋅ − ≤ − + + ⋅ = − + ⋅ = = + + s DG s DG d G s DG u d G u u DG s Gu d Gu D s s s T m T T T T T V ρ ρ ρ & &最後我們可以提出以下定理: 定理 3.1:考慮一個非線性二階系統(3.1),當假設 3.1 到假設 3.3 同時成立時, 以下控制律 ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ ≠ ⋅ − = = 0 s s DG s DG u 0 s u u if , ) ( ) ( if , 0 0 T T m ρ (3.9)
對於(3.1)系統原點能達到全域漸進穩定(globally asymptotically stable, GAS)。
3.2.2 傳統順滑模控制
根據第 2 章傳統順滑模控制設計方式,我們首先需要選取適當的順滑面,使 得在順滑平面上的系統狀態最終能達到穩定。參考[12],在這裡我們選取順滑平 面為: 0 Mx x s= 2 + 1 = (3.10) 其中M=diag{m1,m2,K,mn}>0。我們可以明顯地發現當s=0時;即系統在順 滑面上的時候,x1會逐漸為0,x2也會隨之為0而使系統狀態穩定。 接著我們要設計一個控制律,使得系統狀態在有限時間內會到達順滑平面而 且會持續維持在順滑平面上。因此我們先對(3.10)式做微分,得到 1 2 Mx xs&= & + & (3.11)
再將原始系統(3.1)代入,整理後得到 d Gu Mx f s&= + 2 + + (3.12) 根據傳統順滑模控制設計程序,我們選擇
re eq u u u= + (3.13) eq u 是為了使系統狀態在不考慮d的時候能持續維持在順滑平面上,即設計 控制律使s&=0。因此我們可以得到
(
f Mx2)
G ueq =− +⋅ + . (3.14) 另外一部分的控制律是為了讓系統狀態在有限時間內到達順滑平面,也就是要設 計控制律滿足sTs&≤−η s ,η >0為一常數。在這裡我們先提出一個假設: 假設 3.4:存在一非負函數σ( )
x,t (底下簡稱σ )使以下不等式成立 σ ≤ d . (3.15) 根據傳統順滑模控制設計程序,若假設 3.4 成立,我們可以設計 re u 為 sgn(s) G ure =−µ⋅ + (3.16) 其中µ =η+σ,sgn(s)=(
sgn(s1),K,sgn(sn))
T。將(3.14)、(3.16)代入(3.13),得到 最後完整的控制律為:(
f Mx sgn(s))
G u=− +⋅ + 2+µ⋅ (3.17) 我們可以證明控制律(3.17)可以滿足sTs&≤−η s 的條件。考慮(3.12)和(3.17),可以 得到(
f Mx Gu d)
s(
sgn(s) d) (
)
s d s s s s sT&= T + 2 + + = T −µ⋅ + ≤−η+σ ⋅ + ⋅ ≤−η⋅ . 由以上的討論我們會有以下的結果:定理 3.2:當假設 3.1 和假設 3.4 同時成立時,採用控制律(3.17)可以使原始系 統(3.1)的原點達到全域漸進穩定(globally asymptotically stable, GAS)。
3.2.3 非線性 LQR 控制
考慮不包含擾動d的動態系統(3.1),我們可將系統表示下面形式: u G f x& = ′+ ′ (3.18) 其中 T T T 2n 2 1, ) ( ∈ℜ = x x x , T T T 2n 2 , ) ( ∈ℜ = ′ x f f , T T n m n m × × ∈ℜ = ′ (0 ,G ) 2 G 。此系 統與 2.3 節所描述的系統形式相同,因此我們應用同樣的設計步驟。 LQR 的控制的是找到一個最佳狀態回溯控制律使得二次成本函數(3.2)的值 降低。參考 2.3 所描述的設計方式,一個非線性 LQR 的控制律為 T x T V G R u=− −1 ′ 2 1 (3.19) 其中列向量V 要符合下面的 H-J 等式: x 0 4 1⋅ ′ 1 ′ + = − ′ − Qx x V G R G V f Vx x T xT T (3.20) 求解V 的過程與 2.3 節所述相同。 x3.3 衛星姿態穩健控制之模擬
3.3.1 衛星動態
首先考慮三個動器的衛星系統動態方程式,根據尤拉(Euler)方程式的定義 [23],衛星系統動態方程式以角動量守衡法則來表現有以下形式: h dt dh dt dh G T b e ⎥⎦ + × ⎤ ⎢⎣ ⎡ = = + ω (3.21)其中 T 是外界的干擾,可能包括太陽壓力力矩(solar pressure torque)、磁場干擾 (magnetic field disturbance)以及外部輸入力矩(external input torque);G 為地球的e
重力梯度力矩(gravity gradient torque),h是總角動量,ω 是主軸的角度率,而
[]
⋅b是表示衛星相對於本體座標軸。定義iˆ、 jˆ 和kˆ為本體標軸中的標準基底向量, 因此總角動量可以表示成:
(
I h)
i(
I h)
j(
I h)
k h= xωx + ωx ˆ+ yωy + ωy ˆ+ zωz + ωz ˆ (3.22) 其中I 、x I 、y Iz分別代表相對於x、 y 、 z 三軸的慣量,ωx、ωy、ωz分別定義 為相對應x、 y、z 三軸的角度率,hωx、hωy和hωz為輸入力矩。將(3.22)代入(3.21) 可以得到(
)
(
)
(
)
⎟⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ − + − + + − + − + + − + − + + = + x y y x y x x y z z z z x x z z x z x y y y y z z y z y y z x x x e h h I I h I h h I I h I h h I I h I G T ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω ω & & & & & & (3.23) 根據[23],將角度率與尤拉角度率的關係表示成向量的形式:(
)
(
)
⎟⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ + + − + − = ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ = θ ψ φ φ ψ ω ψ φ θ ψ φ ψ ω θ θ ψ ω φ ω ω ω ω sin sin cos sin cos sin sin sin cos cos cos sin 0 0 0 & & & z y x (3.24)其中φ、θ和ψ 分別為相對於x、 y 和 z 軸的旋轉角度,ω0為軌道率。重力梯度 力矩可以寫成:
(
)
(
)
(
)
⎟⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − − − − − = φ θ ω φ θ ω φ θ ω sin 2 sin 2 3 cos 2 sin 2 3 2 sin cos 2 3 2 0 2 0 2 2 0 y x x z z y e I I I I I I G . (3.25)定 義 狀 態 變 數 x1 =φ , x2 =θ , x3 =ψ , x4 =φ& , x5 =θ& , x6 =ψ& , 考 慮 (3.23)-(3.25),衛星動態系統可以表示成如下的形式: ⎩ ⎨ ⎧ + = = Gu f x x x 2 2 1 & & (3.26) 其中
(
)
T x x x1 2 3 1 = , , x ,(
)
T x x x4 5 6 2 = , , x , T z z y y x x I T I T I T u ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ = , , , (f , f , f )T 3 2 1 = f , )], 2 ( 2 3 ) 2 ( 2 1 ) 2 ( 2 1 ) 2 ( 2 1 ) 2 ( 2 1 [ 1 2 2 2 0 1 2 2 3 2 0 1 3 2 2 2 2 0 3 2 1 6 0 1 3 2 2 0 2 1 2 3 2 0 3 1 6 0 1 3 5 0 3 2 1 5 0 6 5 3 2 5 0 3 2 6 0 1 x s x c x s sx x s x s x s x s sx sx sx x x s x c sx x c x s cx cx x sx cx x sx sx cx x x x I I I sx sx x cx cx x f x z y ω ω ω ω ω ω ω ω ω ω ω − − − − + + + + + ⋅ − + − = ], ) 2 ( 2 3 ) 2 ( 2 1 ) 2 ( 2 1 [ 1 2 2 0 3 1 2 2 0 1 3 2 2 2 0 3 2 6 0 1 3 4 0 3 2 1 4 0 6 4 z 1 3 2 4 0 2 3 1 5 0 2 1 3 6 0 1 3 4 0 1 3 6 0 2 cx x s x s sx cx cx x s x s cx sx x sx cx x sx sx cx x x x I I I cx sx sx x cx sx sx x sx sx cx x sx cx x cx sx x f y x ω ω ω ω ω ω ω ω ω ω ω + − − − + + ⋅ − + + + + + = ], ) 2 ( 2 3 ) 2 ( 2 1 ) 2 ( 2 1 [ 1 2 2 0 2 1 3 2 2 0 2 1 3 2 0 2 3 5 0 3 2 1 4 0 3 1 4 0 5 4 x 3 1 4 0 3 1 6 0 3 2 1 5 0 2 3 1 6 0 3 2 1 4 0 3 sx x s x s sx x s cx cx x s cx sx x sx sx sx x cx cx x x x I I I cx cx x sx sx x sx cx cx x sx cx cx x cx sx sx x f z y ω ω ω ω ω ω ω ω ω ω ω − + − − − + ⋅ − + − + − − = ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ = 1 0 0 0 1 0 0 0 1 G其中c和s分別代表cos和sin這二個函數。 以上衛星動態系統主要是描述三個控制輸入的系統;然而,在很多實際的應用 中,一個系統通常會備有冗餘(redundancy)以因應推進器故障的情況,讓系統能 夠維持正常的運作。其中有一個例子為備有四個推進器的 ROCSAT II 衛星[24], 其系統動能為: ⎩ ⎨ ⎧ + = = S Su G f x x x 2 2 1 & & (3.27) 其中 f 不變,而G 和S u 分別為:S ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ − − − − = 28 . 0 28 . 0 28 . 0 28 . 0 69 . 0 69 . 0 69 . 0 69 . 0 67 . 0 67 . 0 67 . 0 67 . 0 S G (3.28) ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ = 4 3 2 1 u u u u S u (3.29) 在這裡u1、u2、u 和3 u4為 ROCSAT II 衛星在四個方向上的控制力矩。整合以上 討論,我們考慮有擾動存在的衛星動態系統為: ⎩ ⎨ ⎧ + + = = d u G f x x x S S 2 2 1 & & (3.30)
其中x1 =
(
φ,θ,ψ) (
T = x1,x2,x3)
T,x2 =(
φ&,θ&,ψ&)
T =(
x4,x5,x6)
T,f =(
f1,f2,f3)
T,3.3.2 模擬結果
在這一小節中,我們利用 MATLAB 軟體來模擬 3.3.1 小節所提到的衛星系 統;在考慮存在系統擾動的情形下,利用 3.2 節所提到的三種控制方式,觀察是 否能達到穩定,另外還有比較它們二次成本函數以及收斂時間等這些效能的情 況。在下面的模擬例子中,我們所選取的參數數值如下所述。在系統動態方面, rad/s 10 0312 . 1 3 0 − × = ω , 2 s m N 2000 ⋅ ⋅ = = z x I I , 2 s m N 400 ⋅ ⋅ = y I ,(
)
T t t t),0.05cos(2 ),0.05sin(3) sin( 05 . 0 = d 。 有 關 二 次 成 本 函 數 的 Q 和 R 分 別 為 6 I Q= ,R =I4。在積分順滑模控制律方面,由於系統中的 4 個控制輸入原本是 由 3 個控制輸入增加冗餘後所產生的,所以這裡D= ,I3 u 這裡採用非線性 LQR0 控制的方式,對V 求得其 3 階的近似解,x ρm的選取為 +1 ∞ +d GS 。同樣減輕切 跳(chattering)現象,我們將控制律(3.9)修改為下面型式: ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ < − ≥ − = ε ε ρ ε ρ s DG s DG u s DG s DG s DG u u T S T S m T S T S T S m ) ( if , ) ( ) ( if , ) ( ) ( 0 0 (3.31) 在這裡我們選取ε =0.02。在傳統順滑模控制律方面,M =2⋅I3,σ 的選取為 ∞ d ,η =1。另外為了減輕符號函數(sign function)所造成的切跳現象,在這裡我 們用飽和函數(saturation function)來取代符號函數,其邊界寬度為 0.02。而系統 的初始狀態設為 T ) 2 . 0 , 3 . 1 , 3 . 0 , 5 . 1 , 07 . 0 , 7 . 0 ( ) 0 ( = − − − x 。 模擬的結果顯示在圖 3.1-圖 3.13,而效能的比較整理在表 3.1。我們將積分 順滑模控制的結果以 ISMC 當作標示;傳統順滑模控制的結果以 CSMC 當作標 示;另外以 LQRd 和 LQR 分別代表非線性 LQR 控制在系統有擾動和沒有擾動的 情況下所得到的結果。也就是說 LQR 是相當於積分順滑控制中的無干擾系統控制(nominal system control)的部分。 圖 3.1-圖 3.6 分別代表狀態x1-x ,我們可以看到 ISMC 和 CSMC 在有擾動6 的情況下都可以達到穩定,而 LQRd 因為有受到擾動的影響所以無法穩定。另外 需要注意的一點是由於 ISMC 和 LQR 的狀態幾乎重合,所以狀態的圖形會看起 來只有三條線,但實際有四條線。接著圖 3.7-圖 3.9 為 ISMC 和 CSMC 的順滑 函數變化的比較;ISMC 的順滑函數一開始就為 0,此後也一直保持在 0 附近, 如此驗證了積分順滑模控制中消除了到達階段(reaching phase)的這個特性;而 CSMC 的順滑函數則都是過了一段間才達到 0。我們可以注意到當t=3的時候, CSMC 的順滑函數s1、s2和s 差不多都已經到達 0,而 CSMC 的控制律也跟著3 在t =3的時候產生了幅度較大的變化,也影響了 CSMC 的狀態x4-x 它們的變化6 軌跡變得不平滑。這是因為當系統狀態到達順滑面時,CSMC 的控制律會隨之作 切換而產生的結果。最後圖 3.10-圖 3.13 為控制律的比較圖,值得注意的是 ISMC 和它對應的無干擾控制律 LQR 並不相同,不過 ISMC 的控制律看起來是以 LQR 的控制律做為基線的諧波振盪;這是因為 ISMC 和 LQR 的狀態軌跡十分接近, 而 ISMC 的控制律比 LQR 的只是多了一部分要抵消干擾的控制律,而造成此現 象。 表 3.1 為效能比較的整理表,主要說明了狀態穩定的情況和時間,以及一些 二次成本函數的比較。其中 LQRd 最後並沒有達到穩定,所以用 No 來表示;有 穩定的則用 Yes 來表示。而在二次成本上 LQR 都是花費最少的,再來 ISMC 在 控制力道上花費的比 CSMC 少,而狀態的部分則是比 CSMC 多;不過最後二次 成本函數的總和還是 ISMC 比 CSMC 少。而 u ∞最大的是 CSMC。收斂時間 (convergence time)這裡是訂為最後所有狀態的絕對值都小於 0.01 的時候。CSMC 在這裡是用了最多控制力道的,這也使得 CSMC 的收斂時間是最快的。 總和以上結果,首先可以驗證單靠非線性 LQR 控制律無法達到穩健性,而 其他二個方法則可以順利達到。再來就是我們可以發現 ISMC 的狀態變化會與它
所對應的無干擾系統(在此次模擬中為 LQR)是幾乎重疊的,這點我們可以從圖 3.1-圖 3.6 以及表 3.1 內狀態的積分結果觀察得知。而從圖 3.7-圖 3.9 我們可以 看到 ISMC 的順滑函數能夠從頭到尾一直保持為 0,也就是一直維持在順滑模式 之下。另一方面,雖然 ISMC 比起 LQR 需要多一部分控制律來抵消擾動的影響, 不過由於 ISMC 的狀態軌跡是幾乎與 LQR 的相同,所以在一定程度上減少了二 次成本函數的花費,我們可以將此 ISMC 的控制律作為一種次最佳化(suboptimal) 的設計方式。由最後的效能比較,我們也驗證了 ISMC 的二次成本函數會比 SMC 的花費少。
圖 3.1 狀態變數x1之時間響應比較圖
圖 3.5 狀態變數x 之時間響應比較圖 5
圖 3.9 順滑函數s 之時間響應比較圖 3
圖 3.13 控制輸入u4之時間響應比較圖 表 3.1 效能比較表 Performance index Controller Stable ∫ uuT ∫xTx ∫uTu+∫xTx u ∞ Convergence time ISMC Yes 2.1259 4.6294 6.7553 2.5099 5.1730 CSMC Yes 2.4605 4.8981 7.3586 2.6305 4.6330 LQRd No X X X X X LQR Yes 1.9517 4.6277 6.5794 2.5099 5.1570
第4章
積分順滑模控制在可靠度控制問題上之研究
由第三章的討論我們可以得知積分順滑模控制有著一些不錯的優點,像是不 受系統擾動影響的穩健性,還有可以加入非線性 LQR 的設計方式減少二次成本 函數,並且我們從模擬結果也加以驗證了這些特性。在這一章中,我們希望能將 積分順滑模控制的方法延伸到可靠度控制上面,並且仍然能夠保有原本積分順滑 模控制的特性和優點。另一方面,我們會與傳統順滑模可靠度控制以及非線性 LQR 可靠度控制的方法來做比較。在可靠度設計的議題上,主要可分為二種設 計方式;一種是被動式(passive)可靠度控制,另一種是主動式(active)可靠度控 制。被動式可靠度控制必須先劃分出不會故障和可能故障的促動器(actuator),可 是實際上在故障發生前我們是很難得知這方面的資訊的。而主動式可靠度控制可 以依靠錯誤偵測與診斷機制(fault detection and diagnosis,FDD)來監視故障的發 生和嚴重的程度。所以在這裡我們決定以主動式的設計方式為主,下面所談到的 控制律設計都是基於主動式的控制律設計。 這一章中首先在 4.1 節我們定義所探討的系統為非線性二階系統,還有二次 成本函數的形式以及控制目的。在 4.2 節會推導如何設計積分順滑模的可靠度控 制律,以及簡述傳統順滑模可靠度控制和 LQR 的可靠度控制的控制律設計。最 後在 4.3 節我們會以衛星姿態控制做為模擬範例,討論三種設計方式的控制情 況,並驗證積分順滑模可靠度控制的一些優點。4.1 問題描述
在主動式的設計方式裡,我們會先假設我們由錯誤偵測與診斷機制(fault detection and diagnosis,FDD)的資訊中得知故障的促動器部分。為了區分正常和 故障的促動器,我們以 H 代表正常的部分; F 代表故障的部分。參考系統動態 (3.1),為了討論可靠度的問題,我們考慮一個非線性二階微分方程如下:
( )
( )
( )
( )
( )
⎩ ⎨ ⎧ + ⋅ + ⋅ + = = d x u x G x u x G x f x x x F F H H 2 2 1 & & (4.1) 其 中 ∈ℜn 1 x , ∈ℜn 2 x ,(
T T)
T 2n 2 1, ∈ℜ = x x x 代 表 系 統 狀 態 ,( )
k H x ∈ℜ u ,( )
m k F − ℜ ∈ x u 為控制輸入且m≥k ≥n,因為在傳統順滑模控制和積分順滑模控制 中,都需要rank(
GH( )
x)
=n的假設存在[16],[21]。d代表可能的系統不確定項 或外在干擾之類的系統擾動,( )
∈ℜn x f 以及( )
(
( )
( )
)
n m F H × ℜ ∈ = G x G x x G , 為平滑 函數且f(0)=0, T ) (⋅ 代表矩陣或向量的轉置。在此我們必須先提出一個假設以 方便後續控制律的推導。 假設 4.1:對所有的狀態而言,rank(
GH( )
x)
=n。 另外我們同樣定義二次成本函數為:(
)
dt J =∫0∞ xTQx+uTRu (4.2) 其中 ∈ℜn×n Q ,R∈ℜm×m。 本章主要目的是要應用積分順滑模控制的觀念,設計一個控制律使得當某些 促動器發生故障時依然能夠利用剩下正常的促動器來完成穩定的任務。另外我們 會順便加入系統擾動的因素與傳統順滑模可靠度控制以及非線性 LQR 可靠度控制來作比較,並且以二次成本函數(4.2)作為一項效能的指標。下面提到的函式為 了表示上的方便,我們會省略一些在函式裡的變數。
4.2 主動式可靠度控制律設計
主動式可靠度控制的一個重要機構是錯誤偵測與診斷(FDD)的機制。我們考 慮系統(4.1),並且假設藉由錯誤偵測與診斷我們估測到故障部分的促動器為 F uˆ ,而估測誤差令為∆uF,那麼實際的系統動態我們可以表示成:(
)
⎩ ⎨ ⎧ + ∆ + ⋅ + + = = d u u G u G f x x x F F F H H ˆ 2 2 1 & & (4.3) 其中 m k F − ℜ ∈ uˆ , m k F − ℜ ∈ ∆u 。4.2.1 積分順滑模可靠度控制
這一小節我們會討論如何用積分順滑面來設計主動式的可靠度控制律。如同 3.2.1 小節所提出的假設 3.3,在這裡我們也需要提出一個假設: 假設 4.2:對於下面非線性系統 ⎩ ⎨ ⎧ + = = Gu f x x x 2 2 1 & & (4.4) 存在一控制律u=u0( )
x (底下簡稱u )能使系統(4.4)全域漸進穩定。 0 另外,若假設 4.1 成立,我們可以將系統(4.3)改寫為下列形式:(
)
⎩ ⎨ ⎧ + ∆ + ⋅ + = = F F m H H u d G u G f x x x ˆ 2 2 1 & & (4.5) 其中∆dm =G+H ⋅(
GF∆uF +d)
。在這裡我們先對∆dm的範圍作個假設: 假設 4.3:存在一非負純量函數ρm( )
x,t (底下簡稱ρm)使以下不等式成立 m m ≤ρ ∆d . (4.6) 根據積分順滑模設計程序,我們先定義順滑面為:(
)
∫ + ⋅ ⋅ = − − ⋅ = t t d t t t 0 0 0 2 2( ) ( ) ( ( )) ( ( )) ( ) ] [ ) , (x D x x f x G x u 0 s τ τ τ τ . (4.7) 其中 ∈ℜn×n D ,而且對所有狀態而言,DGH為滿秩。下面我們會證明當系統處 於順滑模式時,系統動態會相當於假設 4.2 所述之無干擾系統(nominal system) 動態。 當系統處於順滑模式時,亦即s=0,s&=0,由(4.5),(4.7)可得到(
x f Gu)
D(
G(
u d)
G u Gu)
0 D s&= ⋅ &2 − − 0 = ⋅ H ⋅ H +∆ m + FˆF − 0 =(
F F)
m H H G G u Gu d u =− ⋅ − −∆ ⇒ + ˆ 0 . 代入(4.5)可以知道此時的系統動態為: ⎩ ⎨ ⎧ + = = 0 Gu f x x x 2 2 1 (4.8) 與假設 4.2 所定義的無干擾系統相同。 然後我們考慮當促動器故障的情況發生時,FDD 運作正常。我們對正常運 作的促動器uH的設計為:(
)
(
)
⎩ ⎨ ⎧ ≠ + − ⋅ = − ⋅ = ++ 0 s u u G Gu G 0 s u G Gu G u if , ˆ if , ˆ 1 0 0 F F H F F H H (4.9) 其中u 如假設 4.2 所定義的,實際可依需求選擇不同的設計方式,例如最佳化0 控制。而u1的存在是為了使系統狀態維持在順滑模式,與(3.8)類似,u1設計為: s DG s DG u T H T H ) ( ) ( 1 =−ρ (4.10) 其中ρ > ρm。下面我們需要證明控制律(4.9)和(4.10)能夠符合下面特性:當系統 不在順滑面上時,此控制律能讓系統保持在順滑面上。 要證明系統動態會維持在順滑面上,我們可以用李雅普諾夫函數來證明。考 慮當s≠0,我們選擇李雅普諾夫函數為V sTs 2 1 = ,對V 微分並代入(4.7)、(4.9) 和(4.10)得到(
)
(
)
(
)
(
)
0. ) ( ) ( ) ( ) ( ) ( ˆ ˆ ˆ 0 1 0 0 < + − ⋅ ≤ ∆ ⋅ + ⋅ − ≤ ⎟⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎝ ⎛ ∆ + − ⋅ = − + ∆ + + − ⋅ = − + ∆ + ⋅ ⋅ = = m T H m T H T H m T H T H H T F F m H H F F T F F m H H T T s V ρ ρ ρ ρ s DG d s DG s DG d s DG s DG DG Gu u G d G u G u G Gu D s Gu u G d u G D s s s & & 因此我們可以確定系統可以維持在順滑面s=0。總合以上所述,我們可以提出 以下定理: 定理 4.1:假設系統(4.1)中控制輸入發生了驅動器故障的情形,由 FDD 得到故 障情況的估計值為uˆF而估計誤差為∆uF。此時,若假設 4.1 到假設 4.3 成立,則 控 制 律 (4.9) 和 (4.10) 對 系 統 (4.1) 的 原 點 能 達 到 全 域 漸 進 穩 定 (globally asymptotically stable, GAS)。
4.2.2 傳統順滑模可靠度控制
這一小節我們會簡單說明傳統順滑模可靠度控制的設計方式[12]。同樣藉由 錯誤偵測與診斷的資料,我們考慮系統(4.3),將GF∆uF +d看作是干擾並且提出 下面假設: 假設 4.4:存在一非負純量函數σ( )
x,t (底下簡稱σ )滿足下列不等式 σ ≤ + ∆u d GF F (4.11) 然後我們選取順滑面為: 0 Mx x s= 2 + 1 = (4.12) 其中M =diag{m1,m2,K,mn}>0。由主動式可靠度控制器的程計程序,正常促動 器的控制律設計成(
f Mx2 G uˆ sgn(s))
G uH =− +H ⋅ + + F F +µ⋅ (4.13) 其中µ =η+σ 且η >0,(
)
T n s s ), ,sgn( ) sgn( ) (s = 1 K sgn 。我們可以證明此控制律 (4.13)能夠滿足sTs&≤−η ⋅ s 的條件,由(4.3)、(4.12)和(4.13)我們可以得到:(
)
(
)
(
)
. ) ( ˆ 2 1 2 s s s s d s u G s d u G s sgn s Mx d u G u G u G f s x M x s s s ⋅ − = ⋅ + ⋅ − ≤ ⋅ + ⋅ ∆ + ⋅ − ≤ + ∆ + ⋅ − ⋅ = + + ∆ + + + ⋅ = + ⋅ = η σ µ µ µ F F F F T F F F F H H T T T & & & 最後我們可以得到以下結論: 定理 4.2:假設系統(4.1)中控制輸入uF發生了驅動器故障的情形,由 FDD 得到故障情況的估計值為uˆF而估計誤差為∆uF。此時,若假設 4.1 和假設 4.4 成立, 則控制律(4.13)對系統(4.1)的原點能達到全域漸進穩定(globally asymptotically stable, GAS)。