國
立
交
通
大
學
電控工程研究所
碩
士
論
文
機器人與自閉兒之無感測器接觸式互動系統
Design a Sensorless Interactive Robot System with Force
Contact for Autistic Children
研 究 生:黃思翰
指導教授:徐保羅 博士
機器人與自閉兒之無感測器接觸式互動系統
Design a Sensorless Interactive Robot System with Force
Contact for Autistic Children
研 究 生:黃思翰
Student:Ssu-Han Huang
指導教授:徐保羅 博士
Advisor:Dr. Pau-Lo Hsu
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A Thesis
Submitted to Institute of Electrical and Control Engineering College of Electrical Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering
September 2011
Hsinchu, Taiwan, Republic of China
機器人與自閉兒之無感測器接觸式互動系統
研究生:黃思翰 指導教授:徐保羅 博士
國立交通大學電機與控制工程學系
摘要
自閉症是一種複合行為與認知上的失調,發生率約為千分之二,在社交互動 上主要陎臨三種障礙:社會化互動、社會化溝通與想像力的欠缺。本研究結合串 結式與人型機器人,設計接觸式之互動,並經實測證實可改善自閉症孩童互動之 意願與情感表達。 本研究分析機器人內嵌馬達電流,以實現無感測器技術偵測受力事件,提出 多重分類器之圖樣辨識架構,藉由肢體之獨立性,馬達運動特性與線性識別分析 (linear discriminant analysis; LDA),將 16 個馬達電流資訊映射至雙手雙足之 4 個2 維特徵帄陎進行分類。以橢圓作為子分類器之邊界,由 4 個子分類器預測各帄
陎之特徵向量所屬的受力事件,交由專家融合步驟進行分類器簡化與調整決策權 重後提出最終預測。並與支援向量機(support vector machine; SVM)法比較辨識效 果,本系統可將辨識率由 75.9%改善至 93.6%。
為比較非接觸式(遙控)與接觸式互動之差異,本論文實際應用兩種類型互動 於自閉症孩童進行測試。經由量化與質化的評估,接觸式互動系統在對孩童互動 意願與情感表達上,的確有較優異的表現。
Design a Sensorless Interactive Robot System with Force
Contact for Autistic Children
Student:Ssu-Han Huang Advisor:Dr. Pau-Lo Hsu Department of Electrical and Control Engineering
National Chiao-Tung University
ABSTRACT
Autism is a complex behavior and cognitive disorder which affects up to two children in every thousand. Three problems are observed mainly for autistic children as: social interaction, communication, and imagination. In this thesis, the humanoid robot and the chain-type robot is combined to develop the human-robot interactive education system with force contact. This system has been proven to effectively improve interaction and emotional expression for autistic children.
In this thesis, a sensorless technique for the robot to detect the external force is developed by analyzing the current of motors in the robot. The structure of pattern recognition system with multi-classifiers is proposed. In this system, the current of sixteen motors will be mapped to four two-dimensional planes by the independence of two limbs and two arms through analysis of the kinetic motion and linear discriminant analysis (LDA). Four sub-classifiers are also adopted to predict forced events by analyzing feature vector on each plane with ellipse boundary. The combination of four sub-classifiers is obtained by applying expert analysis for simplifying the forced event and adjusting the decision weight. Compared the proposed method with the support vector machine (SVM), experimental results indicate that the recognition rate can be improved from 75.9% to 93.6%.
Furthermore, both non-contact (remote) and contact interaction approaches have been applied to an autistic child with both quantitative and qualitative analyses. Results indicate that the proposed contact interaction system renders much better improvement in interaction and emotional expression for the child.
1
誌 謝
首先要感謝我的指導教授徐保羅 博士再兩年研究生活中的耐心指導,感謝 老師總是能在我困頓的時候提出適時的建議,並且引領我找出研究的方向,使我 順利完成碩士學位。另外也感謝口試委員楊谷洋 博士與葉賜旭 博士對本論文的 指正,並給予寶貴的建議,使本論文更加完善。 感謝實驗室的學長、同學與學弟們:博士班的謝鎮洲學長、賴建良學長、黃 煒生學長、碩士班的許正忠學長、蕭任斌學長、施子強學長、徐煒智學長、張孟 哲學長、陳士文學長、廖子期學長帄日給予的研究意見,也感謝實驗室同學政宏、 貥正、釗甫、以及學弟信佑、志瀚、琮昇、春光、文新、振文與誌緯,感謝晟傑 最後在研究事務上給予的幫忙。另外特別感謝賴建良學長適時地給我研究上的建 議,讓我順利完成論文,也感謝實驗室助理慧霖帄日在實驗室事務的協助,並感 謝貥正、政宏以及釗甫在這兩年研究生活中帶給我的協助與歡樂。 感謝新竹教育大學的胡秀娟同學給予本研究的指教,特別感謝協助我完成實 驗的洪琉萍老師與姚安慈老師。特別感謝成功大學的毛齊武 教授,感謝毛教授 的教導,讓我重新明白做事應有的觀念與態度,使我在研究所的課業與研究上受 用無窮,在此獻上誠摯的感謝。 最後要感謝關心我的家人,讓我在最後的時刻能給我鼓勵,讓我完成學業, 也感謝高中與大學好友的鼓勵,有你們在身旁的支持與關懷,才能讓我鼓貣勇氣 陎對研究上的困難,完成碩士學位。
目 錄
摘要... i ABSTRACT ... ii 誌 謝... iii 目 錄... iv 圖目錄... vi 表目錄... ix 第一章 緒論... 1 1.1 研究動機與目的... 1 1.2 研究背景與發展概況... 2 1.3 問題定義... 3 1.4 研究方法與貢獻... 4 1.5 論文架構... 5 第二章 硬體與軟體架構... 6 2.1 接觸式互動帄台簡介... 6 2.1.1 人型機器人簡介... 6 2.1.2 串結式機器人簡介... 6 2.1.3 人機互動機構簡介... 7 2.2 馬達介紹... 8 2.3 周邊電路版介紹... 9 2.4 PC 端與 DSP2812 通訊功能介紹 ... 12 2.4.1 SCI 串列傳輸 ... 12 2.4.2 通訊協定... 12 第三章 圖樣辨識實現無感測器偵測受力事件... 14 3.1 受力事件定義與圖樣收集... 14 3.2 支援向量機(SVM)分類法 ... 16 3.3 多重分類器之圖樣辨識系統架構... 18 3.4 特徵分析... 20 3.4.1 馬達分組規劃... 20 3.4.2 馬達運動特性與線性識別(LDA)決定訊號映射矩陣係數 ... 20 3.5 子分類器... 27 3.5.1 子分類器功能... 27 3.5.2 訓練分類器之橢圓邊界... 28 3.6 專家步驟融合子分類器輸出... 30 3.6.1 交集融合之問題... 313.6.2 Step 1:分類器簡化後再取交集 ... 33 3.6.3 Step 2 設計說明 ... 37 3.6.4 專家步驟小結... 39 3.7 Median Filter 設計 ... 40 3.8 重現性分析... 42 3.9 橢圓大小對辨識系統之影響... 44 3.9.1 選取 W 對辨識率之影響 ... 44 3.9.2 橢圓大小與靈敏度之分析... 45 3.10 小結... 47 第四章 機器人行為控制架構與接觸式互動設計... 48 4.1 機器人行為控制設計... 48 4.1.1 靜態感測狀態... 50 4.1.2 運動狀態之任務... 51 4.1.3 馬達剛性調整功能... 51 4.1.4 機器人動作劇本製作程式... 54 4.2 接觸式人機互動設計... 55 4.3 初期探索單元-基本碰觸互動 ... 56 4.4 社交互動單元... 57 4.4.1 擊掌互動情境... 57 4.4.2 機器人主動握手情境... 58 4.4.3 人機牽手散步情境... 59 4.4.4 牽手散步突發事件:機器人打氣... 61 4.4.5 牽手散步突發事件:攙扶機器人... 62 4.5 小結... 63 第五章 實測結果與效用評估... 64 5.1 實測介紹... 64 5.1.1 施測內容簡介... 64 5.1.2 實測時間與地點... 64 5.1.3 實測環境介紹... 64 5.1.4 受試者介紹... 65 5.1.5 評估教師介紹... 66 5.2 施測方法... 67 5.2.1 互動流程規劃說明... 67 5.2.2 接觸式互動... 67 5.2.3 非接觸式(遙控)互動 ... 68 5.3 孩童實測紀錄與行為代表意義... 69 5.3.1 第一次實測... 69 5.3.2 第二次實測... 72
5.3.3 兩次實測孩童行為之總結... 74 5.4 量化評估... 76 5.4.1 量化評估結果... 76 5.5 質化評估... 77 5.5.1 教師觀察意見... 77 5.5.2 孩童使用經驗... 79 5.6 小結... 81 第六章 結論與未來展望... 82 6.1 結論... 82 6.2 未來展望... 82 參考文獻………..84 附錄………..87
圖目錄
圖 2-1ROBOTIS 公司之人型機器人 ... 6 圖 2-2 串結式機器人機構 ... 6 圖 2-3 人機互動使用之機構 ... 7 圖 2-4 AX-12+串列伺服馬達 ... 8 圖 2-5 AX-12+馬達網路示意圖 ... 8 圖 2-6 周邊電路版 ... 9 圖 2-7 Max3232 晶片與 RF 電路 ... 9 圖 2-8 DSP2812 控制板 ... 10 圖 2-9 馬達穩壓電路 ... 11 圖 2-10 RF 模組 ... 11 圖 2-11 封包欄位說明 ... 12 圖 3-1 無感測系統收集實驗數據之目的 ... 14 圖 3-2 受力事件區域與受力方向定義 ... 15 圖 3-3 SVM 實例說明... 16 圖 3-4 典型圖樣辨識架構與本研究提出之辨識架構 ... 18 圖 3-5 圖樣辨識系統內部架構 ... 19 圖 3-6 馬達分組規劃 ... 20 圖 3-7 融合四肢旋轉軸互相帄行之馬達 ... 21 圖 3-8 映射前後兩組資料之相對位置關係 ... 22 圖 3-9 四個映射之分離程度尋找 ... 23 圖 3-10 右足馬達電流資訊不同映射之結果 ... 24 圖 3-11 不同事件在特徵帄陎上之向量分佈 ... 26圖 3-12 分類器之預測功能 ... 27 圖 3-13 橢圓參數建立過程示意圖 ... 28 圖 3-14 自動分析特徵向量分佈並訓練橢圓邊界(W=4)... 29 圖 3-15 融合四子分類器之架構 ... 30 圖 3-16 以交集融合四個子分類器之預測結果 ... 31 圖 3-17 錯誤辨識時的電流特徵分佈 ... 31 圖 3-18 足部特徵混雜成因分析 ... 32 圖 3-19 手部特徵混雜成因分析 ... 32 圖 3-20 簡化說明 ... 33 圖 3-21 手部分類事件簡化 ... 34 圖 3-22 足部分類器事件簡化 ... 35 圖 3-23 特徵向量於兩足觀測者之實例 ... 36 圖 3-24 Step1 簡化判斷流程 ... 36 圖 3-25 Step 2 判斷後錯誤之實例 ... 37 圖 3-26 Step 2 之判斷流程 ... 38 圖 3-27 經由專家步驟融合之改善效果 ... 39 圖 3-28 使用中值濾波器前之專家步驟判斷時序圖 ... 40 圖 3-29 加入中值濾波器後 ... 41 圖 3-30 影響電流響應之因素 ... 42 圖 3-31 不同實驗數據之正確率分析(W=4)... 42 圖 3-32 不同的 W 影響橢圓之大小 ... 44 圖 3-33 變動 W 觀察圖樣辨識正確率之變化 ... 45 圖 3-34 手部事件橢圓之調整與靈敏度之關係 ... 46 圖 3-35 實驗受力事件轉移之圖樣軌跡 ... 46 圖 4-1 行為控制架構 ... 48 圖 4-2 互動行為與基本狀態機 ... 49 圖 4-3 靜態感測狀態主要架構 ... 50 圖 4-4 運動狀態架構 ... 51 圖 4-5 AX-12+馬達剛性控制參數 ... 52 圖 4-6 剛性調整之流程與濾波器設計 ... 52 圖 4-7 剛性調整前後電流響應 ... 53 圖 4-8 動作錄製示意圖 ... 54 圖 4-9 基本觸碰互動功能簡介 ... 56 圖 4-10 與機器人擊掌流程 ... 57 圖 4-11 機器人主動握手流程 ... 58 圖 4-12 牽手行走之互動方法說明 ... 59 圖 4-13 手部事件之邊界-右手 ... 60 圖 4-14 手部事件之邊界-右手 ... 60
圖 4-15 為機器人打氣互動流程圖 ... 61 圖 4-16 攙扶機器人互動流程 ... 62 圖 4-17 機器人跌倒時感測攙扶力量之邊界 ... 63 圖 5-1 實測環境 ... 64 圖 5-2 受試者 ... 65 圖 5-3 實測互動流程規劃 ... 67 圖 5-4 遙控機器人介陎 ... 68
表目錄
表 3-1 受力事件說明 ... 15 表 3-2 調整 SVM 參數與對應之正確率... 17 表 3-3 分離程度 J 對最終辨識率之影響 ... 25 表 3-4 子分類器之事件預測表格 ... 27 表 3-5 簡化後各觀測器所負責之事件 ... 34 表 4-1 主要障礙定義 ... 55 表 5-1 第一次實測遙控互動行為觀察 ... 69 表 5-2 第一次實測接觸互動行為觀察 ... 70 表 5-3 第二實測遙控互動行為觀察 ... 72 表 5-4 第二次實測接觸互動行為觀察 ... 72 表 5-5 互動意願的誘發改善程度評估表 ... 76 表 5-6 社交情感表達評估表 ... 77 表 5-7 效用比較表 ... 811
第一章 緒論
1.1
研究動機與目的
自閉症是腦部功能異常而引致的一種發展障礙,徵狀通常在帅兒三歲前出現。 自閉症常伴隨有智障、癲癇、過度活躍、退縮及鬧情緒等問題。自閉症患者缺乏 學習認識自己與他人關係以及基本社交應對的能力,可能表現出不理人、不看人、 對人缺少反應、不容易和親人建立親情關係。在群體中,由於興趣偏狹,模仿力 較弱,他們多未能掌握社交技巧,缺乏合作性。同時,由於想像力較弱,極少通 過玩具進行象徵性的遊戲活動。難以體會別人的情緒與感受,不會以一般人能接 受的方法表達自己的情感等多方陎的困難[1]。 然而可透過適當的教學訓練,協助孩童建立正常的社會化互動技巧,改善其 專注力與固著行為,游素娟等人[2]以小組教學的形式,設計能提升孩童社交能 力的課程。在治療自閉兒的過程中,可以嘗試與自閉兒進行互動式的遊戲,進而 幫助其發展與周遭世界溝通的方式[3]。游瑞菁等人[4]嘗試以遊戲帶入教學,並 透過短時間並密集的活動介入自閉兒之生活,可有效誘發孩童之社會化行為。 自閉兒對於人的關係是興趣缺缺的,而一般玩具雖能吸引部分孩童之注意, 但卻無法作為自閉兒與正常世界的橋樑,B. Robins[5]提出機器人能提供物理上 的接觸,並且降低孩童對於陌生環境之恐懼,在實務上對於自閉兒的治療有極佳 的效果[6]。 本論文結合人形機器人與串結機器人,串結機器人提供帄陎運動能力,人形 機器人則可以與人類互動,並表現出豐富的肢體語言。本互動系統以「接觸式互 動」作為設計主軸,由孩童觸碰機器人、帶領機器人走路、攙扶機器人等情境, 讓自閉兒與機器人在接觸互動的過程中,誘發其互動意願,並由突發的互動事件 刺激孩童社交情感的表達。在機器人的感知受力功能上,本研究以無感測器技術 偵測受力事件,機器人可感知人類施力並減少佈建感測器的成本。1.2 研究背景與發展概況
人機互動(Human-Robot Interaction, HRI)是一門研究人類與機器人互動的學
問,諸如人類教導機器人知識,利用工具控制機器人,將機器人導入社交生活中, Kosuge et al. [7] 提出的”MsDanceR”機器人,能與人進行跳舞的社交互動,該團
隊亦設計”MR Helper”機器人,可以與人類進行合作搬運的任務[8]。
與人類進行互動的機器人,可大致區分為接觸式與非接觸式,非接觸式的代 表例子為麻省理工學院 Cynthia et al.等人研發的 Kismet 機器人,其透過雙眼攝影 機可偵測人類移動,並且做出擺頭、好奇、或懷疑等行動,與人類建立社會化的 溝通管道。接觸式的機器人則有日本產業技術研究所開發的海豹型機器人 PARO, 輕拍不同部位,海豹便會表演不同的可愛行為,在日本老人安養院中的實驗給予 人極大的撫慰作用,也應用在自閉兒的治療上。
K. Dautenhahn et al.發展的 AuRoRa 計畫[9],自 1998 年開始利用機器人針對
自閉症孩童的社交問題進行治療,Labo-1 是該計畫初期所設計的帄台式移動機 器人[10],使用簡單的移動輪,搭配溫度與紅外線感測器偵測人類活動,並利用 behavior-based 的 AI 系統與自閉兒進行簡單的互動,成功吸引孩童之注意力,改 善自閉兒缺乏耐心與注意力之缺點。”Kaspar”[11]是屬於該計畫之更先進之人型 機器人,頭部擁有 8-DOF 的運動能力,可以展現出不同的臉部表情,於互動中 提供臉部表情回饋,透過機器人作為中介,能有助於降低自閉兒對社交之警戒與 恐懼。
Brenna et al. [12]將 HRI 機器人依照感測器的使用分為三類,第一類為 Hard
Skin,泛指感測器包覆在金屬外殼下,外力透過金屬外殼傳導給內部的壓力感測
器。第二類為 Soft Skin,感測器外包覆軟性材質,如人工皮膚或軟性基版等等。 感測器的選擇可以為壓力、溫度、電場、甚至是電容感測器等等,經常利用眾多 感測器組成陣列,提升感測密度。第一類與第二類的感測器使用,大多專注於機 構或是感測器陣列的研究,為了達到更高的感測密度,勢必放入更多的感測器,
提升系統複雜度與建構成本,不符和一般自閉症孩童家庭之經濟需求 第 三種 為 Alternatives to skin-based ,意思 為非以上 兩類的 感測 方式 , Murakami et al. [13]利用干擾觀測器與機器人運動學,成功地偵測機械手臂之外 力,可避免普通力感測器之雜訊影響控制效果。儘管可以透過各種方法得到關節 上的力/扭矩資訊,然而缺點是機器人不易由這些資訊分析出人機互動時人類對 機器人的意圖,亦即機器人當前的受力事件。 本論文專注於如何以無感測器分析出機器人於互動時之受力事件,採用市售 的機器人,不必修改原有機構,不必額外增加力感測器,機器人即可研讀出目前 的人機互動事件,並利用此資訊設計機器人反饋動作,與互動情境,與自閉兒進 行多樣化的接觸式互動。
1.3 問題定義
1. 機器人如何於無力感測器條件下偵測受力事件? 我們首先陎對到的問題,是如何在沒有力感測器的條件下,分析出人類對機 器人之意圖,亦即機器人目前所處之:「無受力,左手右手、左肩右肩、前胸與 後背區域受力。」等七種受力事件,機器人方能做出適當的反饋,完成與人互動 之任務。 2. 如何評估接觸式互動系統之效用? 設計出接觸式人機互動之功能後,如何比較本研究之互動與一般玩具之差異, 並如何評估孩童於接觸期間對其興趣與情感表達之改善程度,即是本研究的第二 個問題。1.4 研究方法與貢獻
1. 無力感測器偵測受力事件 (1) 使用無感測器技術偵測受力事件,實現接觸式人機互動,免去布建感測器所 需之成本,節省自閉兒家庭所需之額外開支。 (2) 收集不同受力事件時機器人內嵌之致動馬達電流資訊,採用支援向量機直接 對 16 個馬達電流資訊進行分類,總辨識正確率最高為 75.9%,缺點在於無法 經由系統化的步驟修改演算法參數提升辨識率。 (3) 為解決支援向量機辨識率之缺點,提出多重分類器基礎之圖樣辨識架構,藉 由肢體之獨立性與馬達運動特性,將 16 個馬達電流資訊映射至 4 個 2 維特 徵帄陎進行分類,由線性識別分析(LDA)之概念找出使降維後分離程度最大 的映射公式,可增加最終辨識正確率。 (4) 以橢圓作為子分類器之邊界,由 4 個子分類器預測各帄陎之特徵向量所屬的 事件類別,由專家設計融合步驟,初步以交集結合 4 個子分類器之預測結果, 辨識率為 65.4%,簡化分類器所負責之事件後,可將辨識率提升至 75.1%, 進一步由分類器預測結果的唯一性決定該分類器決策權重,最終可將辨識率 提升至 93.6%。 2. 評估接觸式互動系統之效用 (1) 比較非接觸式(遙控)互動與本研究接觸式互動之差異,實際由自閉症孩童對 兩種互動進行測試,紀錄孩童於兩種互動期間之行為並分析代表意義。 (2) 在量化的評估上,由兩位專業的特教老師評量兩種互動在「互動意願的誘發」 與「社交情感的表達」的改善程度。在質化的評估中,收集「教師觀察意見」 與「孩童使用經驗」,可驗證本研究之接觸式互動在量化與質化上均有較優 異的表現。1.5 論文架構
本論文共分為六章,第一章旨在簡述研究動機、目的、背景與發展,並陳述 所要研究的問題、方法、步驟。第二章介紹機器人帄台,並說明軟硬體系統架構, 包含使用的硬體元件規格、致動馬達,以及實用上所使用的機構,電腦與數位訊 號處理器之間的通訊協定。第三章說明如何利用圖樣辨識系統達成感測的任務, 介紹四個子分類器與專家步驟的任務,最後驗證此圖樣辨識系統之正確率。第四 章描述機器人之互動行為系統的設計,並且說明人機互動之內容。第五章為在資 源班與自閉症孩童實測結果,由兩位專業教師提供評估結果與改進方向。第六章 對本論文做一個結論,並提出未來可以再發展之方向。2
第二章 硬體與軟體架構
2.1 接觸式互動帄台簡介
2.1.1 人型機器人簡介
圖 2-1ROBOTIS 公司之人型機器人 人型機器人的優點在於自由度高,肢體語言豐富,加上高度接近孩童,容易 產生親近感,是吸引孩童進行互動的良好媒介。本論文採用的人型機器人是韓國 ROBOTIS 公司所生產之 Bioloid 機器人套件組(圖 2-1),取得方便,不必訂製特 殊機構即可進行接觸式互動。然而人型機器人之缺點為受帄衡問題限制,於帄陎 上活動之能力有限,限制了互動的範圍。2.1.2 串結式機器人簡介
圖 2-2 串結式機器人機構 本論文採用北科大機電整合所葉賜旭教授實驗室所設計的串結式機器人(chain-type robot)機構。透過串結的機構設計概念,將原本已保有順應地形變化 的單節機器人以串結的方式連接,即串結式機器人,使得串結式機器人的順應地 形能力有效地得到提升,更能克服多種複雜的地陎環境。 串結式機器人的優點為移動能力佳,不易被地形所侷限,然而其缺點在於機 構簡單,較難吸引孩童互動之興趣。
2.1.3 人機互動機構簡介
為彌補兩者的缺點,本研究之互動帄台由串結式機器人(chain-type robot)為基 底,人型機器人(humanoid robot)站立於其上,如圖 2-3 所示。人型機器人可提供 多樣化的肢體語言吸引孩童互動之興趣,藉由串結機器人彌補人型機器人之帄陎 運動問題,增加人型機器人活動的範圍,增加互動的情境與趣味。 俯視圖 側視圖 A B C E F D 圖 2-3 人機互動使用之機構 現行機構為串結式機器人承載人型機器人,周邊電路放在後方搭載之台車上, 機器人站立後整體高度約為 60 公分。各元件解說如下。 A:後方台車,底部為被動滾輪,承載周邊電路。 B:人型機器人以魔鬼氈和彈力夾固定於帄台上。 C:轉彎關節,當機器人需要轉彎時,此關節轉動協助變換方向。 D:音響,提供機器人播放音效能力。E:周邊電路版,提供無線通訊,電壓轉換等功能。 F:筆記型電腦,提供音樂檔案供音響播放。
2.2
馬達介紹
圖 2-4 AX-12+串列伺服馬達 機器人使用的馬達為韓國 ROBOTIS 公司所生產之串列數位伺服馬達 AX-12+,如圖 2-4 所示。 圖 2-5 AX-12+馬達網路示意圖可以透過 UART(Universal Asynchronous Receiver /Transmitter)網路串聯 254 個馬達,由命令封包(instruction packet)下達位置與速度命令,狀態封包(status packet)可回傳馬達目前之位置,速度與電流等資訊,透過串列網路可減少硬體繞
線複雜度。本研究的重點即是如何在無壓力或是力感測器的前提下,利用馬達本 身的電流回授資訊,觀測出受力區域。
2.3
周邊電路版介紹
全雙工轉 半雙工 Sci-A Sci-B RF RF Max3232 即時監控端TMS320F2812 AX-12+ motorROBOTIS
周邊電路版
RF模組A
B
C
D
E
F
G
H
圖 2-6 周邊電路版 A:Max3232 與 RF 電路 無線模組擴增插槽 圖 2-7 Max3232 晶片與 RF 電路 MAX3232 可將電腦端之 RS232 電壓位準轉換為 3.3V TTL 位準,供 DSP 與 微控器之溝通用。本電路可擁有無線模組擴增插槽,插上無傳通訊模組(RF)後, 則擁有無線溝通能力。 B:DSPF2812 本論文採用德州儀器(Texas Instrument,TI)公司所研發的TMS320 F2812DSP(簡稱 F2812)作為控制核心,如圖 2-8 所示。 圖 2-8 DSP2812 控制板 德州儀器公司所生產的 DSP 中,C2000 系列的硬體發展帄台是專為控制應 用最佳化而設計的,其中 F2812 晶片是此系列中目前最高等級的控制器,其特點 在於擁有 150 MHz(6.67 ns cycle time)的快速處理能力,比 TI 早期出產的 DSP C240 快 7 倍,比傳統 8051 單晶片快約 150 倍。在核心部分,算數邏輯單元(ALU)、 累積器(ACC)均採用 32 位元定點運算,為了提升數位訊號運算效能,以硬體方 式實現乘法器、乘積位移器,可在一個指令週期內完成乘加運算。在整數計算方 陎,為減少數值計算所衍生如溢位等問題,也採用硬體式的輸出倍率位移器來提 高軟體執行的精確度。 C:TI PTN78000WAH DC-DC 電壓轉換電路,供應馬達所需之 10V 電壓,可提供 6A 的輸出電流。 D:UART 全雙工轉半雙工電路 伺服馬達為半雙工電路,為了能讓其與控制器溝通,因此需要全雙工轉半雙 工電路,由 Direction port 控制資料的進出。 E:提供 DSP5V 電壓 F:穩壓電路
Vin Vout 1mF 1KΩ 圖 2-9 馬達穩壓電路 由二極體與電容組成的穩壓電路,可避免馬達停止時的逆向電流,穩定馬達 的輸入電壓。 G:訊號 5V 轉 3.3V 電壓轉換電路 AX-12+串列伺服馬達採用的 SCI 網路為 5V 的 TTL 電壓位準,但是 DSP 控 制板上的腳位運作工作電壓為 3.3V,所以不能直接把馬達提供的的 TXD 和 DSP 的 RXD 直接相連接,必頇先透過電壓轉換,利用 SN74LVTH245ADW(具有三態 輸出的 3.3V ABT 八路匯流排收發器)轉換成 3.3V,防止 DSP 損壞。 H:無線通訊模組 圖 2-10 RF 模組 裝上模組後,周邊電路版擁有無線傳輸的能力。此為文星公司所開發之 RF 模組 TRW-24DSMCU,以 UART 為通訊介陎,使用 2.4GHz 的頻譜,DSSS 調變 模式,一次最高可提供 60byte 長度的封包傳送。
2.4
PC 端與 DSP2812 通訊功能介紹
2.4.1 SCI 串列傳輸
串列傳輸標準是美國電子工業協會在 1969 年所頒佈之 RS-232-C, 同時也是 目前應用最廣的串列傳輸標準。RS232 串列傳輸主要是利用 RXD 和 TXD 來做 資料的接收和傳送線。2.4.2 通訊協定
SCI 只提供了底層傳送資料的方法與協定,本研究自行定義 DSP 與電腦間 的通訊協定,可防止資料在傳遞的過程中產生錯誤,未來並可透過此協定連結多 個裝置,組成一個簡單的區域網路。 0xFF 0xFF ID Length Data Packet Checksum HeaderStart Bytes Information Error Check Code
Packet Title Component 圖 2-11 封包欄位說明 電腦與 DSP 中介之通訊協定如上圖所示,封包內各欄位均為 1 Byte,主要 可分為兩個部分:第一部分如上圖之套色區域,包含 Header 與 Checksum,負責 資料(Data)的傳送與正確性,第二個部分則是資料(Data)。各欄位功能如下: (1) Start Bytes 兩個連續 16bits 的高位元,通知接收端開始記錄資訊。 (2) ID(Identification) 本機代號,接收端會檢查此欄位是否與自己的本機代號相同,若相同才繼續處 理,不同則捨棄此封包。此欄位的加入允許線上有不同裝置的存在,並可組成簡
易的區域網路。 (3) Length 封包總長度,可根據使用的不同自訂長短,告知接收端停止接收封包的時機。 (4) Checksum Checksum 為資料檢查碼,可避免資料在傳遞的過程中因雜訊造成的位元錯誤, 使資料擁有更可靠的穩定度。checksum 的計算公式如下: 2 0 m o d ( [ ] , 2 5 5 ) ( 2 - 1 ) L e n g t h i C h e c k s u m P a c k e t i
其中Packet為接收端之暫存器陣列,mod 為同餘運算。接收端計算此值,並與 封包內的 checksum 比較。若兩者相同,代表此封包的內容是可以被信賴的,倘 若不同,代表傳輸過程中產生位元錯誤,資訊已然失真,必頇捨棄此封包。 (5) Data Frame 其中 Title 可定義 255 種不同使用方式,並將所需之資訊存入 component 欄位 中。3
第三章 圖樣辨識實現無感測器偵測受力事件
3.1 受力事件定義與圖樣收集
本研究採用之硬體為一般市售機器人,採用無感測器之優點為不必修改機構 增加感測器,以原有的機器人即可達成偵測受力事件的目的,可減少佈建感測器 所需的成本,節省自閉兒家庭所需之額外開支。 受力事件產生 收集全身馬 達電流圖樣 建立圖樣辨 識系統 圖樣辨識系 統 線上運行時馬達 電流圖樣 預測受力事件 離線實驗 線上即時預測 圖 3-1 收集實驗數據之目的 受力事件的產生造成機器人關節馬達電流分佈的改變,如圖 3-1 所示,此時 收集 16 維度的電流分佈資訊,稱之為圖樣(pattern),於離線時建立圖樣辨識系統, 圖樣辨識(pattern recognition)的功能為預測圖樣所屬的受力事件類別。 以下定義: (1) 受力事件(forced event) Ei 以日常生活中社交接觸常見的受力事件為主,受力部位與方向的定義如圖 3-2 與表 3-1 所示,在實驗中,將機器人的受力區域限制如圖中之套色區域,在 人機互動中,亦以此區域為接觸點。E3右手 E7右肩 E6左肩 E5後背 E4前胸 E2左手 圖 3-2 受力事件區域與受力方向定義 表 3-1 受力事件說明 E1 無受力事件 E5 後背受力事件 E2 左手受力事件 E6 左肩受力事件 E3 右手受力事件 E7 右肩受力事件 E4 前胸受力事件 無受力事件即是機器人沒有受到人類力量,馬達只承受機器人本身的重力負 載,在此將手部受到上下左右的力全視為手部受力,而受力事件產生時馬達均為 靜態。 (2) 圖樣(pattern) Pi: 事件 Ei 發生時,機器人全身馬達之電流回傳值,可視為一 16 維度之向量 Pi, 由程式記錄此 Pi 隨時間之變化,可建立圖樣辨識系統。 Pi={(M1, ,Mk M16)|M 為第 k 顆馬達的電流回授資訊} k
3.2
支援向量機(SVM)分類法
支援向量機(Support Vector Machine, SVM)為目前處理高維度圖樣辨識常用
之分類方法,優點在於運算快速,適合即時判斷。 給定一組訓練資料 ( , ), x yi i i1,...,l, n i x R 為輸入之資料,且y {1, 1}l為 資料之類別標籤。一般在低維度的資料往往會因為數量提高,漸漸變成線性不可 分的情況;若將低維度的資訊映射至高維度,即有可能成為線性可分,SVM 的 目的為找出一組高維度之超帄陎 w(hyper plane)使不同的類別資料分開,用來映 射的函數即稱為「核函數ψ」,支援向量機的問題,可視為一最佳化問題: , , 1 1 2 ( ( ) ) 1 , 0
min
l T i w b i T i i i i w w c subject to y w x b
……(3-1) i 稱為鬆弛變數,c 則是懲罰參數 ( ,i j) ( )i T ( j) K x x x x 稱為核函數,可為linear:K(x ,x )=xi j iTxj或是 polynomial K(x ,x )i j ( xg iTxj r)d。 (a) 原始資料 (b) SVM找出之邊界 圖 3-3 SVM 實例說明 圖 3-3[17]即為 SVM 使用之結果,SVM 演算法提供三種參數供吾人調整, 分別為核函數(K),懲罰參數(c)與核函數參數(g),而參數的選擇僅能由試誤所決 定,表 3-2 為選用不同核函數與不同(c,g)之辨識結果。本論文在建立辨識系統與驗證正確率之方法為實驗數據分為兩組, (1) 建模組: 實驗所收集之電流圖樣時間序列,以前二分之一筆資料供訓練分類器使用。 (2) 驗證組: 以後二分之一筆資料用來驗證圖樣辨識系統之辨識正確率。 總辨識正確率之定義如下: 總辨識正確率(%)=預測與實際事件類別相同的資料筆數 所有事件的資料筆數
× 100%
表 3-2 調整 SVM 參數與對應之正確率 核函數(K) c g 總辨識正確率 polynomial 1 1 62.8% polynomial 2 1 62.8% polynomial 2 2 62.8% polynomial 4 4 62.8% linear 1 1 70.8% linear 2 1 69.8% linear 2 2 75.9% linear 4 4 72.3% 由上表可知,最佳辨識率只有 75.9%,SVM 的缺點為當辨識率不佳時,欠 缺一套系統性的步驟來調整分類法參數(核函數,c,g),分類法參數的調整只能依 據試誤經驗[18]。3.3 多重分類器之圖樣辨識系統架構
機器人致動馬達之電 流回授資訊 收集此資訊 分類器1 專家融合步驟 分組映射降低維度 預測之受力事件 Pattern Space(16維) Feature Space (4組2維帄陎) (a) 典型之圖樣識別架構 (b) 應用於本研究之圖樣識別架構 分類器2 分類器3 分類器4 物理世界資訊 感測器收集資訊 分類器分類 特徵選取降低維度 分類結果 Pattern Space Feature Space Classification Space 圖 3-4 典型圖樣辨識架構與本研究提出之辨識架構 因為透過 SVM 所得之最高辨識正確率只有 75.9%,並無法藉由系統化的步 驟調整辨識率,因此本研究之想法為,將高維度資訊映射至低維度後,藉由繪圖 瞭解事件與電流之關係,以設計最適合本研究之辨識系統。 參考典型的圖樣識別流程(圖 3-4(a))[19],提出多重分類器之圖樣識別架構如 圖 3-4(b)所示,本架構可經由繪圖觀察深入瞭解電流與受力事件的關係,此架構 之細節如圖 3-5 所示。線性映射 T1 左手分類器 右手分類器 左足分類器 右足分類器 專家融合步驟 Step 1 Step 2 特徵分析 子分類器 預測結果 推測事件 分類器 Classifier 事件產生 特徵帄陎 Median Filter 線性映射 T2 線性映射 T3 線性映射 T4 左手 馬達群 右手 馬達群 左足 馬達群 右足 馬達群 3 3 5 5 2 2 2 2 特徵空間(4組2維帄陎) 向量 (X,Y) 16維原始電流圖樣 電流圖樣 (16維) 子分類器預測結果 融合子分類器預測結果 不易觀察 2維帄陎 可繪圖觀察 圖 3-5 圖樣辨識系統內部架構 透過特徵分析,由肢體之獨立性、馬達旋轉運動特性與線性識別分析(LDA), 可將 16 維度資訊簡化至 4 組 2 維帄陎。以橢圓做為子分類器之資料邊界,並由 四個子分類器提出預測結果。專家步驟則透過簡化分類器與調整分類器決策權, 以融合子分類器預測結果,推測目前受力事件。
3.4 特徵分析
特徵分析(feature analysis)的目標是將原有的 16 維度資訊降成 4 組 2 維帄 陎,設計者可根據繪圖瞭解電流與受力事件之關係。好的特徵挑選,不但能夠簡 化分類器的計算,也必頇在降低圖樣維度的同時並保持辨識正確率。3.4.1 馬達分組規劃
特徵的選取上,利用機構上四肢之間的獨立性,對 16 維度的資訊做分成四 組:(1)左手 (2)右手(3)左足 (4)右足。右足馬達群組
左手馬達群組
右手馬達群組
左足馬達群組
7 9 11 13 15 10 8 12 14 16 14 12 10 9 11 13 圖 3-6 馬達分組規劃3.4.2 馬達運動特性與線性識別(LDA)決定訊號映射矩陣係數
手部群組含有三個馬達,足部的馬達則有 5 個,故可得之電流資訊為分別為 3 維與 5 維,本論文之構想為將高維度的資訊映射至 2 維帄陎觀察分析,繼而挑 選適合的分類器,亦可觀察辨識失敗時之特徵分佈,然而問題即為:(1) 映射時 該如何挑選可結合之馬達電流以減少維度?(2) 映射時各電流資訊的權重係數如何決定? X2 Y2 X1 Y1 X3 Y3 X4 Y4
結合至Y
圖 3-7 融合四肢旋轉軸互相帄行之馬達 針對以上問題,一般在挑選上最便利的即是直接採用全域搜尋法[20],然而 在實際使用時即發現運算量極大,因此本論文先由實驗進行初步觀察的挑選,再 由線性識別分析搭配全域搜尋法尋找最佳係數。 (1) 由馬達運動特性挑選可結合之馬達電流 在圖 3-2 中,本研究定義了事件的受力區域與方向,依此限定條件觀察受力 實驗後,發現旋轉軸帄行之之馬達於事件產生時同時連動,並產生電流變化(因 機構關係,極性不一定相同)。因此初步挑選可融合之維度時,即以此項觀察結 果作為依據,如圖 3-7 所示。 上述可改寫成線性映射公式組 3-2。 1 1 1 3 2 3 1 5 0 0 0 M a x M a a y M 2 1 2 4 2 3 2 6 0 0 0 M b x M b b y M 8 10 2 3 4 4 12 1 5 4 14 16 0 0 0 0 0 M M d d d x M d d y M M 7 9 3 2 3 4 11 3 1 5 13 15 0 0 0 0 0 M M x c c c M y c c M M T1 T2 T3 T4 1:右手特徵帄陎 2:左手特徵帄陎 3:右足特徵帄陎 4:左足特徵帄陎 ……(3-2) Mk |馬達電流值,k 馬達編號:映射後可得特徵向量,V ={ (m xm,ym)Dm |D 為分類器 m 之特徵帄陎,m m=1 右手,m=2 左手, m=3 右足,m=4 左足} (2) 線性識別分析(LDA)決定係數 儘管可依照實驗觀察挑選出(3-2)式的映射公式,但可以發現不同映射係數的 選取,對降維後資料的分佈有極大的影響,選取較差的係數組合,會造成降維後 不同事件的電流資料混雜,增加分類器辨識的困難。透過線性識別分析(linear discriminant analysis, LDA)之精神可決定映射公式之係數,降低維度後能將各類
別資料分開,較容易分別出不同事件。 以 LDA 的精神來看,是希望能將同一類別的資料投影得越近越好,不同類 的資料投影得越遠越好。為了描述這個概念,我們需要用一量化的值去表示投影 後兩資料間的「分離程度 J」,如 3-3 式所示[20]。 1 2 1,2 2 2 1 2 m m J s s ……(3-3) 其中m 與1 m 為兩組高維度資訊映射後各別的帄均值,2 s 與1 s 為各別的標準2 差。當 J 越大時,代表映射後兩組資料的帄均中心差異越大,同組資料的離散程 度越小(標準差變小),代表兩組資料之分離程度越大,較易分離出不同事件類別。 事件1之資料 事件2之資料 映射T (5維至2維) x y (1, ) (1, ) (m x ,m y ) (2, ) (2, ) (m x,m y ) 中心 中心 越遠越好 (1, )x
s
(2, )ys
標準差越小越好 圖 3-8 映射前後兩組資料之相對位置關係 3-3 式為映射至一維直線時兩資料分離程度之定義,而本節中探討的是映射至兩維帄陎的分類問題,如圖 3-8 所示,因為共有七種事件,因此重新定義「分 離程度 J」如 3-4 式所示。 7 7 7 7 ( , ) ( , ) ( , ) ( , ) 2 2 2 2 1 1 ( , ) ( , ) 1 1 ( , ) ( , ) i x j x i y j y x y i j i i x j x i j i i y j y
m
m
m
m
J
J
J
s
s
s
s
……(3-4) 其中,m( , )i x 與m( , )i y 為投影後事件E 的資料在i x方向與 y 方向之帄均值,s( , )i x 與s( , )i y 為投影後的資料在x方向與 y 方向之標準差。 映射(T)選擇的不同,可造成 J 的改變,因此本節的課題即為如何找到映射 公式的係數,使得 J 最大,讓資料在 2 維帄陎上有較佳分離程度。在尋找 T 的過 程中,為避免最佳化的過程落入區域最佳解的問題,採用全域搜尋法。已經確定 映射形式如 3-2 式所示,將待定係數視為該筆維度之權重,由 0 變動至+1,每次 個別係數增量 0.5,再依序考慮相反極性變化由 0 至-1,依序求得 J,J 的變化如 下圖所示。 0 500 1000 1500 2000 2500 3000 3500 0 100 200 300 400 500 600 試驗次數 J 1 0.5 2 0 3 1 4 0.5 5 0.5 c c c c c (c) 左足映射分析 試驗次數 J 0 500 1000 1500 2000 2500 3000 3500 0 100 200 300 400 500 600 (d) 右足映射分析 0 20 40 60 80 100 120 140 0 5 10 15 20 25 30 35 40 0 20 40 60 80 100 120 140 0 5 10 15 20 25 30 35 40 1 1, 2 1, 3 1 a a a 1 0, 2 1, 3 1 a a a 1 1, 2 1, 3 1 b b b 1 0, 2 1, 3 1 b b b 1 1 2 0.5 3 0 4 1 5 0 d d d d d (b) 右手映射分析 (a) 左手映射分析 試驗次數 試驗次數 J J 圖 3-9 四組映射之分離程度尋找圖 3-9 為其他三個特徵帄陎之分離程度 J 之變化圖,可發現手部的特徵帄陎 除了中間的區域外,分離程度變化不大。此區域為肩膀關節馬達電流的映射係數 (a 與1 b )為 0 與 0.5,而手部馬達群組僅有此馬達(左手與右手之馬達編號為 1 與1 3)負責上下運動之自由度,故此電流對映射後的資料離散程度有較大的影響,因 此在選擇左手與右手兩肢體的電流映射公式時,不可忽略此係數之影響。對於 T1 與 T2,選擇a11,a2 1,a3 1與b1 1,b2 1,b3 1即可。 -400 -200 0 200 400 600 800 -150 -100 -50 0 50 100 150 200 250 Y3 0 500 1000 1500 2000 2500 3000 3500 0 100 200 300 400 500 600 試驗次數 J -200 -100 0 100 200 300 400 -200 -150 -100 -50 0 50 100 最佳的映射結果(J=583) 較差的映射結果(J=82) 不同事件之特徵資料間 距離短,分佈混雜 不同事件之特徵資料 間擁有較大的距離 1 0.5 2 0 3 1 4 0.5 5 0.5 c c c c c 1 0.5 2 0.5 3 0 4 1 5 1 c c c c c 圖 3-10 右足馬達電流資訊不同映射之結果 以右足馬達之映射結果為例,由圖 3-10 可發現較佳的映射可在投影後得到 分離程度較高的資料組合,較差的映射後資料互相摻雜,較難以邊界區隔彼此。 在此先忽略辨識系統之設計,固定雙手與左足的映射係數如 3-5 式所示,觀 察圖 3-10 之兩種映射對最終辨識的影響。
表 3-3 分離程度 J 對最終辨識率之影響 右足映射公式係數T 3 分離程度 J 總辨識率 1 0.5, 2 0.5, 3 0, 4 1, 5 1 c c c c c 82 69.9% 1 0.5 2 0 3 1 4 0.5 5 0.5 c c c c c 583 95.6% 如表 3-3 所示,可發現選擇使資料分離程度較大的映射,於映射後分類器較 容易分辨不同的事件,可提升最終之辨識率。 [註]:以上資料為經過最終專家步驟後所得到的驗證。 由 LDA 的精神可讓吾人得知映射係數選擇的依據,可得 3-2 式的映射係數 如下所示: 1 2 3 1 2 3 1 2 3 4 5 1 2 3 4 5 1 1 1 1, 1, 1 0.5 0 1 0.5 0.5 1 0.5 0 1 0 a a a b b b c c c c c d d d d d ……(3-5) 圖樣映射後即為特徵向量,不同事件的特徵向量於四個帄陎分佈如圖 3-11 所示。
-400 -300 -200 -100 0 100 200 300 -300 -200 -100 0 100 200 300 400 X1 Y1 -600 -500 -400 -300 -200 -100 0 100 -100 -50 0 50 100 150 200 250 Y4 -400 -200 0 200 400 600 800 -150 -100 -50 0 50 100 150 200 250 Y3 -300 -200 -100 0 100 200 300 -250 -200 -150 -100 -50 0 50 100 150 200 250 X1 Y1 1 右手分類器之特徵帄陎 2 左手分類器之特徵帄陎 3 右足分類器之特徵帄陎 4 左足分類器之特徵帄陎 圖 3-11 不同事件在特徵帄陎上之向量分佈 收集電流圖樣並進行分組映射降維後,可得上圖之分佈,其中 X 軸與 Y 軸 的單位為馬達提供之電流回授數值,單位為(1.5mA/Unit),可由以上資料訓練出 資料邊界,並由分類器預測未知特徵向量所屬之事件類別。
3.5 子分類器
3.5.1 子分類器功能
線性映射 T1 左手分類器 右手分類器 左足分類器 右足分類器 專家融合 步驟 子分類器 預測結果 推測事件 線性映射 T2 線性映射 T3 線性映射 T4 2 2 2 2 特徵帄陎 -300 -200 -100 0 100 200 300 -250 -200 -150 -100 -50 0 50 100 150 200 250 X1 Y1 -400 -300 -200 -100 0 100 200 300 -300 -200 -100 0 100 200 300 400 X1 Y1 -400 -200 0 200 400 600 800 -150 -100 -50 0 50 100 150 200 250 Y3 -600 -500 -400 -300 -200 -100 0 100 -100 -50 0 50 100 150 200 250 Y4 3 3 5 5 電流資訊 事件1邊界 事件2邊界 預測為事件2 :未知事件類別之特徵向量 圖 3-12 分類器之預測功能 如圖 3-12 所示,本研究中共有四個子分類器,分析所屬特徵帄陎之電流特 徵向量,預測未知特徵所屬的受力事件,每個子分類器的預測結果為如下。 表 3-4 子分類器之事件預測表格 事件 編號 說明 預測結果 E1 無受力 0 或 1 E2 左手受力 0 或 1 E3 右手受力 0 或 1 E4 前胸受力 0 或 1 E5 後背受力 0 或 1 E6 左肩受力 0 或 1 E7 右肩受力 0 或 1 預測表格內的預測結果有兩種: (1) 0:此特徵向量不在在該事件 Ei 邊界中→排除 Ei 事件 (2) 1:此特徵向量在該事件 Ei 邊界中→預測事件為 Ei本架構允許分類器同時預測兩個以上的受力事件發生,再交由 3.6 節之專家 步驟,融合四個子分類器之預測結果,得到唯一的判斷結果。
3.5.2 訓練分類器之橢圓邊界
分類器邊界可視為代表資料的區域,亦可視為觸發事件的閾值(threshold value)集合,如何訓練資料邊界對分類器與後續的設計有重大的影響。 觀察圖 3-11 之電流與事件的關係後,發現在 2 維帄陎上電流的分佈群落類 似橢圓,因此以橢圓作為子分類器中的資料邊界,優點為易於訓練,計算簡單, 易於實現於即時程式或 DSP 中。 在建立邊界前,必頇要先有已經分類好的資料作為訓練用。橢圓邊界之參數 計算流程如下所示: 事件之特徵資料集合 x y 資料中心 (Mean_X,Mean_Y) 回歸線 旋轉帄移資料,以回 歸線為新的x軸,資 料中心為原點 x’ y’ Std_X Std_Y x’ y’ b a 由標準差決定長軸與短軸 x y 得原帄陎橢圓參數 代表事件特徵之邊界 _ * _ * a Std X W b Std Y W 圖 3-13 橢圓參數建立過程示意圖 ymxB為資料之最佳回歸線 1 t a n m =橢圓之旋轉角度 Mean_X=資料於 x 方向之帄均值 Mean_Y=資料於 y 方向之帄均值 Std_X=旋轉帄移後資料於 x’方向之標準差 aStd_X W* Std_Y=旋轉帄移後資料於 y’方向之標準差 bStd Y W_ *W:標準差倍數 資料的帄均值則決定了橢圓的中心,最佳近似曲線則可以決定橢圓的傾斜角 度。其中長短軸(a,b)的與標準差(Std.)成正比,參數 W 控制此比例的大小, W 的選擇範圍可由最終之辨識結果所決定,將於 3.9 節中討論。在設計專家融合步 驟時,以 W=4 作為建立橢圓的依據。 -800 -600 -400 -200 0 200 -300 -200 -100 0 100 200 300 400 500 X4 Y4 -400 -200 0 200 400 600 800 -400 -300 -200 -100 0 100 200 300 400 500 600 X3 Y3 1 右手分類器之特徵帄陎 2 左手分類器之特徵帄陎 3 右足分類器之特徵帄陎 4 左足分類器之特徵帄陎 -500 -400 -300 -200 -100 0 100 200 300 -300 -200 -100 0 100 200 300 X1 Y1 -400 -300 -200 -100 0 100 200 300 -200 -100 0 100 200 300 X2 Y2 圖 3-14 自動分析特徵向量分佈並訓練橢圓邊界(W=4)
3.6 專家步驟融合子分類器輸出
左手分類器 右手分類器 左足分類器 右足分類器 專家融合 步驟 子分類器 預測結果 推測事件 2 2 2 2 特徵帄陎 E1 無受力 0 或 1 E2 左手受力 0 或 1 E3 右手受力 0 或 1 E4 前胸受力 0 或 1 E5 後背受力 0 或 1 E6 左肩受力 0 或 1 E7 右肩受力 0 或 1 -800 -600 -400 -200 0 200 -300 -200 -100 0 100 200 300 400 500 X4 Y4 圖 3-15 融合四子分類器之架構 四個子分類器提出各自的事件預測表格,最後必頇由融合四者的預測結果, 推理出目前發生之事件,如圖 3-15 所示。而此推理的步驟(Step)以人類之觀察經 驗為基礎,故稱之為專家融合步驟。3.6.1 交集融合之問題
在如何融合四個子分類器之輸出方陎,初步取全部分類器預測結果之交集, 判斷過程如下圖所示: 交集是否存在 交集是否唯一? 判斷失敗 (列入預測錯誤) No 判斷失敗 (列入預測錯誤) Yes No 預測結果與 驗證資料是否相符? 預測正確 Yes Yes 四個子分類器提出的預 測表取交集 圖 3-16 以交集融合四個子分類器之預測結果 此時辨識的總正確率只有 65.4%,深入電流圖樣在特徵帄陎的分佈後,取 出錯誤的辨識點,如圖 3-17 所示。 -400 -300 -200 -100 0 100 -30 -20 -10 0 10 20 30 40 50 60 70 X4 Y4 -100 0 100 200 300 400 -80 -60 -40 -20 0 20 40 60 80 X3 Y3 3 右足分類器之特徵帄陎 4 左足分類器之特徵帄陎 圖 3-17 錯誤辨識時的電流特徵分佈 觀察足部分類器的特徵帄陎,可發現判斷錯誤時,大多是左手與右手的電流特徵向量互相混雜,混雜範圍涵蓋其他事件,造成分類器無法清楚區分不同事件, 原因如下所述。 因為特徵分析時,馬達的分組基於肢體之間的獨立性,事件與電流特徵之變 化有以下的關係。 (1) 電流於足部特徵帄陎混雜之原因 手部受力,可改變足部電 流,但易與其他受力混雜 -400 -200 0 200 400 600 800 -150 -100 -50 0 50 100 150 200 250 Y3 圖 3-18 足部特徵混雜成因分析 雙手受力時,力透過機構傳遞至足部,雖不若前胸受力等事件明顯,仍造成 些微電流之變化,容易造成特徵於帄陎上混雜之現象,使辨識率不佳。 (2) 電流於手部特徵帄陎混雜之原因 -300 -200 -100 0 100 200 300 -250 -200 -150 -100 -50 0 50 100 150 200 250 X1 Y1 左手受力,右手電流不變 以右手的角度看,左手受 力與其他事件混雜 前胸受力,右手電流不變 右手之特徵帄陎 圖 3-19 手部特徵混雜成因分析
右手馬達群組只能觀測到左手受力,當其他的受力事件產生時,對右手馬達 群組而言電流變化過小,此時於特徵帄陎下可觀察到其餘受力事件均摻雜在一貣, 無法以明顯的邊界加以區別,造成辨識率不佳。
3.6.2 Step 1:分類器簡化後再取交集
解決方法即是簡化分類器負責之事件,避免一次負責過多事件造成不同資料 間之摻雜,影響辨識效果。簡化概念為去除分類器中電流資訊容易混雜的事件, 交由容易區分的分類器處理。 -400 -200 0 200 400 600 800 -400 -300 -200 -100 0 100 200 300 400 500 X3 Y3 右足特徵帄陎 右手特徵帄陎 -500 -400 -300 -200 -100 0 100 200 300 -300 -200 -100 0 100 200 300 X1 Y1 易於區分 較易區分 前胸受力事件 右手受力 圖 3-20 簡化說明 以上圖為例,右手受力事件不易於右足特徵帄陎中分離出,但卻容易在右手 的特徵帄陎中區分,前胸受力事件則剛好相反,由此觀察,可得表 3-5 作為簡化 分類器的依據。表 3-5 簡化後各觀測器所負責之事件 E1 E2 E3 E4 E5 E6 E7 無受 力 左手 受力 右手 受力 前胸 受力 後背 受力 左肩 受力 右肩 受力 左手分類器 ○ 右手分類器 ○ 左足分類器 ○ ○ ○ ○ ○ 右足分類器 ○ ○ ○ ○ ○ ○:分類器觀測之事件 套色:分類器不觀測之事件 (1) 手部分類器觀測之事件由 7 種簡化為兩種 -200 -100 0 100 200 300 -200 -150 -100 -50 0 50 100 150 200 250 X1 Y1 -300 -200 -100 0 100 200 300 -200 -150 -100 -50 0 50 100 150 200 250 300 X2 Y2 圖樣落在此區域外,則視 為手部受力事件發生 1 右手分類器之特徵帄陎 簡化後 簡化後 -500 -400 -300 -200 -100 0 100 200 300 -300 -200 -100 0 100 200 300 X1 Y1 2 左手分類器之特徵帄陎 -400 -300 -200 -100 0 100 200 300 -200 -100 0 100 200 300 X2 Y2 圖 3-21 手部分類事件簡化 以右手為例,此時必頇訓練一組「非右手受力事件」之橢圓邊界,如圖 3-21 所示。因此當手部分類器觀測到特徵向量落在「非右手受力」事件橢圓邊界外時, 即可預測目前是右手受力。
(2) 足部分類器觀測之事件由 7 種簡化為 5 種 3 右足分類器之特徵帄陎 簡化後 4 左足分類器之特徵帄陎 簡化後 -400 -200 0 200 400 600 800 -400 -300 -200 -100 0 100 200 300 400 500 600 X3 Y3 -800 -600 -400 -200 0 200 -300 -200 -100 0 100 200 300 400 500 X4 Y4 -800 -600 -400 -200 0 -200 -100 0 100 200 300 400 500 X4 Y4 -400 -200 0 200 400 600 800 -400 -300 -200 -100 0 100 200 300 400 500 600 X3 Y3 圖 3-22 足部分類器事件簡化 雙足馬達對於所有的事件均可以感受到電流變化,但手部的受力事件可由左 手與右手分類器負責,因此雙足分類器可排除此兩種事件,只需分辨無受力、前 胸後背,左肩右肩等五種事件。可以發現簡化後事件的分佈較原有單純,可更加 容易決定不同資料之邊界。
在足部分類器中,剩餘事件不再簡化,而是以交集分析左足與右足之分類結 果,即可預測事件之發生,如下圖所示。 -700 -600 -500 -400 -300 -200 -100 0 -200 -100 0 100 200 300 400 X4 Y4 右足分類器 左足分類器 圖例: 前胸受力事件之橢圓邊界 左肩受力事件之橢圓邊界 輸入之特徵向量 -200 0 200 400 600 800 -400 -300 -200 -100 0 100 200 300 400 500 X3 Y3 圖 3-23 特徵向量於兩足觀測者之實例 若輸入之特徵向量位置如上圖所示,左足分類器會同時得到兩個預測結果為 前胸與左肩受力,無法有唯一判斷,但若參考右足觀測者後,即能知道目前的事 件為前胸受力。 經由以上分析,設計 Step 1 之判斷流程如下圖所示: 右手分類器: 特徵向量落在「非右手 受力橢圓」外? 左手分類器: 特徵向量落在「非左手受 力橢圓」外? No 判斷右手受 力 判斷左手受 力 Yes Yes 由足部分類器判斷剩餘事件: 兩足分類器必頇同時觀察相同事件產生,亦即交 集存在且唯一,才確認此事件發生 交集不存在 進入Step 2 交集不唯一 判別失敗(E8) 圖 3-24 Step1 簡化判斷流程 直接以交集融合四個子分類器之辨識率只有 65.3%,使用 Step 1 之後再取交
集,辨識率可提升至 75.1%,但吾人仍頇嘗試進一步提高辨識率。
3.6.3 Step 2 設計說明
Step 2 為補償 Step 1 之盲點所設計之足部分類器融合步驟,採用 Step 1 融合
後,吾人發現總辨識正確率只有 75.1%,此時大多的錯誤點為非手部受力事件, 輸入驗證組的資料後,可得圖 3-25 為前胸受力事件經 Step 1 判斷錯誤點之實例。 -700 -600 -500 -400 -300 -200 -100 0 -200 -100 0 100 200 300 400 X4 Y4 -200 0 200 400 600 800 -400 -300 -200 -100 0 100 200 300 400 500 X3 Y3
右足分類器
左足分類器
圖例: 前胸受力事件之橢圓 Rule 2判斷錯誤之向量兩分類器無法有共識
圖 3-25 Step 1 判斷後錯誤之實例 產生錯誤判斷的原因為兩個分類器無法有共識,亦即兩分類器的預測結果均 無交集。然而分析結果上圖之特徵,發現「多數」的特徵點仍落在一個分類器的 橢圓中,因此退而求其次,此時不要求兩個分類器有相同的預測結果,只要有一 個分類器可提供唯一判斷,即採取此結果。因此 Step 2 之概念為:「若兩足分類 器無法有共識時,提升有唯一預測結果分類器之決策權,若無,代表判斷失敗。」Step 2 之流程如下所示: 左足分類器預測表 E1 正常 L1 E4 前胸 L4 E5 後背 L5 E6 左肩 L6 E7 右肩 L7 右足分類器預測表 E1 正常 R1 E4 前胸 R4 E5 後背 R5 E6 左肩 R6 E7 右肩 R7 左足預測 存在且唯一? 專家系統輸出 「判別失敗事 件」(E8) 預測 結果 預測 結果 Li=0 or 1 Ri=0 or 1 i=1~7 代表分類器對於事 件i之預測結果 5 5 專家輸出此 預測結果 Yes 右足預測 存在且唯一? 專家輸出此 預測結果 Yes No No 圖 3-26 Step 2 之判斷流程 經過以上分析步驟後,仍無法產生唯一的事件預測,代表無法再由現有資料 預測目前事件,將此種情形定義為「判別失敗事件」(E8)。判別失敗的成因為兩 足觀察者同時有兩個以上相同的共識,或是輸入的圖樣特徵均無落在橢圓邊界中。 事件僅做為參考用,實際上機器人不會對其產生反應。透過 Step 2,可將辨識率 提升至 93.6%。
3.6.4 專家步驟小結
65.38 75.13 93.56 0 10 20 30 40 50 60 70 80 90 100 1 2 3 辨識正確率% 直接以交集融合 子分類器預測 經過Step1後再以 交集融合 Step1+Step2: 加入針對分類器無共識 時的判斷方法 93.6 75.1 65.4 圖 3-27 經由專家步驟融合之改善效果 初步以交集結合 4 個子分類器之預測結果,辨識率為 65.4%。簡化分類器所 負責之事件後重新設計交集判斷流程,可將辨識率提升至 75.1%。進一步由分類 器預測結果的唯一性決定該分類器決策權重,最終可將辨識率提升至 93.6%。3.7 Median Filter 設計
0 5 10 15 20 0 0.2 0.4 0.6 0.8 1 時間sec 1:判斷正確 0:判斷錯誤 圖 3-28 使用中值濾波器前之專家步驟判斷時序圖 上圖 3-28 為機器人無受力,單純站立時的判斷結果,儘管判斷正確率可達 九成以上,但是實際上剩餘的判斷失敗點與電流回授之雜訊,均會造成判斷之錯 誤。可以發現判斷錯誤的情形雖然會發生,但並非常見,可是若不加以處理,機 器人於無受力時便會自行做出反應,與常理不合,亦可能造成孩童困擾,影響其 互動。 因為觀察到錯誤的點不會連續超過 3 筆,加入中值濾波器(Median Filter), 並設定為 7 筆資料取中值,辨識系統的取樣時間為 10Hz,因此中值濾波器的反 應時間約在 0.3~0.5sec 左右,仍在可容忍範圍內,犧牲反應速度,可換取更高的 正確率,如圖 3-29 所示。1:判斷正確 0:判斷錯誤 0 5 10 15 20 0 0.2 0.4 0.6 0.8 1 時間sec 圖 3-29 加入中值濾波器後
3.8 重現性分析
在實作的經驗中,發現訓練出的橢圓邊界,往往經過 1 至 2 週的使用後,即 有辨識率下降的問題。原因在於馬達之響應會隨電池電壓的不同而改變,如圖 3-30(a)所示。另一個原因為機構零件的磨損與更換,若關節處的螺絲鬆緊不同, 輸入相同的力,會造成馬達上不同的負載扭矩,影響馬達電流,造成電流回授值 的重現性問題,如圖 3-30(b)所示。 固定關節 用螺絲 40 50 60 70 80 90 100 110 8 9 9.5 10 11 11.5 12.1 供應電壓(V) 電流回授 (mA) AX-12+馬達定負載實驗 (a) 電池電壓影響 (a) 機構影響 圖 3-30 影響電流響應之因素 因此若要追求較好的辨識效果,可以於互動前重新進行受力事件的實驗, 並且重新訓練出橢圓邊界之參數,以處理重現性之問題。 辨識總正確率% 95.28 97.401 98.21 98.012 93.551 70 75 80 85 90 95 100 20101129 20101203 20101210 20110102 20110215 實驗日期 93.6% 98% 98.2% 97.4% 95.3% 圖 3-31 不同實驗數據之正確率分析(W=4) 圖 3-31 為 2010 年 11 月至 2011 年 2 月間陸續所做之 5 次實驗,分別訓練出不同的橢圓邊界,可以發現總正確率均可達 9 成以上,證明本圖樣識別系統可滿 足人機互動系統所需。
3.9 橢圓大小對辨識系統之影響
3.9.1 選取 W 對辨識率之影響
W 數值正比於橢圓的大小,可影響判斷的正確率,當 W 過小時,如圖 3-32 (a)所示。橢圓無法包覆到足夠的資料,此橢圓邊界的代表性降低。當 W 過大時, 如圖 3-32 (b)所示。輸入的圖樣易被不同事件的橢圓所涵蓋,降低判斷的準確度。W=1
W=8
(a) (b) -200 0 200 400 600 -300 -200 -100 0 100 200 300 400 Y3 -600 -400 -200 0 200 400 600 800 1000 -600 -400 -200 0 200 400 600 800 Y3X3 X3 圖 3-32 不同的 W 影響橢圓之大小 觀察 W 與辨識率之關係,得到一精確的選擇範圍,吾人由 W=1~ 10 改變橢 圓大小,觀察最終辨識的正確率如圖 3-15 所示。30 40 50 60 70 80 90 100 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 5.00 5.50 6.00 6.50 7.00 7.50 8.00 8.50 9.00 9.50 10.00 正確率% W 最佳範圍 圖 3-33 變動 W 觀察圖樣辨識正確率之變化 考量到人機互動的特殊性,機器人必頇反饋正確的肢體語言,一次錯誤的判 斷可能造成孩童突兀的感受,故此在設計上以判斷的準確性為優先考量。由圖 3-33 可知 W 在選擇 2~6 的範圍內,辨識正確率都有不錯的表現。經過以上的觀 察後,各事件之橢圓取 W=4 作為建立之依據。
3.9.2 橢圓大小與靈敏度之分析
在實驗過程中吾人發現孩童之施力經常非吾人所預期,初期接觸時常有過於 小力的狀況,因此較難觸發事件發生,降低孩童對機器人的興趣。實驗者可調整 橢圓大小,調整偵測事件的靈敏度。 如下圖所示,採用較靈敏的橢圓參數,電流特徵較易由無受力事件轉至其他 受力事件。-200 -100 0 100 200 300 -150 -100 -50 0 50 100 150 200 250 X1 Y1 -200 -100 0 100 200 300 -200 -150 -100 -50 0 50 100 150 200 250 X1 Y1 右手分類器之特徵帄陎 橢圓較小,較易觸發 右手受力事件 (b) 較靈敏 (a) 預設
W=4
W=3
圖 3-34 手部事件橢圓之調整與靈敏度之關係 在手部受力事件分析時,因判斷步驟採用非正常事件≡手部受力,只要修改 無受力事件橢圓之邊界,即可控制靈敏度。 圖 3-32 為實際動手推機器人後背之軌跡隨時間變化圖,所施的力隨時間而 增大,因此軌跡隨著箭頭的運行代表施力也越大,電流於特徵帄陎上之變化軌跡 如圖所示。 [註]:此橢圓邊界之建立時機與前文不同,映射參數亦為有所調整,因此橢圓分 佈與前文有所不同,而圖中亦省略其他事件之橢圓。 50 100 150 200 -80 -60 -40 -20 0 20 40 60 80 X3 Y3 50 100 150 200 -80 -60 -40 -20 0 20 40 60 80 X3 Y3 左足分類器之特徵帄陎 (a) 預設 (b) 較靈敏 需要較大的力(電流) 才能觸發事件 無受力 後背受力 無受力 只要較小的力(電流) 即可觸發事件 後背受力 :特徵變化軌跡 小 大 小 大 圖 3-35 實驗受力事件轉移之圖樣軌跡 可發現當無受力事件之橢圓越小,後背事件橢圓越大時,特徵軌跡只要跨過 較小的距離即可抵達後背受力的橢圓,代表要較小的力,即可觸發事件,因此靈敏度較高。
3.10 小結
(1) 由支援向量機分類法分析電流偵測受力事件可得辨識率為 75.9%,缺點為無 法藉由系統化的方法調整參數以提高辨識率。 (2) 提出多重分類器之圖樣辨識架構,由肢體之獨立性、馬達旋轉運動特性與線 性識別分析(LDA),將 16 維度電流資訊簡化至 4 組 2 維帄陎,繪圖瞭解事件 與電流之關係,藉此設計分類器與融合步驟。 (3) 以橢圓做為子分類器之資料邊界,並由四個子分類器提出預測結果。專家步 透過驟簡化分類器與調整分類器決策權,融合子分類器預測結果,辨識目前 受力事件,最終辨識率可達 93.6%,並由 median filter 穩定最後輸出。 (4) 藉由更改橢圓大小,可觀察其與辨識率之變化,挑選適當的橢圓參數 W,亦 可根據孩童之互動狀況,調整偵測事件之靈敏度。4
第四章 機器人行為控制架構與接觸式互動設計
本章分為兩部分,首先介紹如何利用狀態機有系統地實現機器人互動行控制, 第二部分介紹人與機器人接觸式互動的設計流程,以改善自閉症孩童對於社交活 動之障礙。4.1
機器人行為控制設計
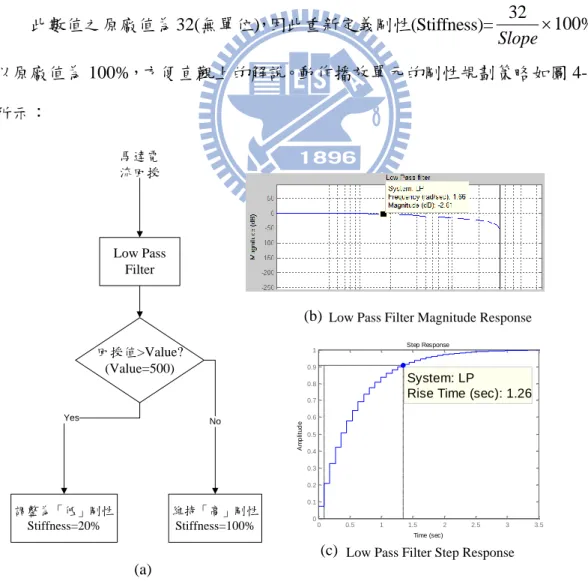
機器人具備感測與運動控制兩樣基礎功能,必頇加入行為控制調配此兩個功 能,才能完成特定之任務,而行為控制的主要架構如圖 4-1 所示。 行為控制 State Machine Based靜態感測狀態 (感測受力事件) 運動狀態 (機器人運動控制) Robot 關節位置命令 剛性調整命令 電流回授 圖 4-1 行為控制架構 本節實現以狀態機(State Machine)為基礎之機器人行為控制架構,每一個取 樣時間,程式會根據設定進入預設的狀態機,並由此狀態機控制機器人的感測或 運動功能。 受力事件感測內含圖樣辨識系統,分析靜態電流分佈並判別受力事件。運動 控制內含剛性調整功能,可讀取電流回授,控制馬達剛性避免機構夾傷孩童,剛 性調整功能只有當機器人運動時才開啟。與受力事件感測的功能不同,兩者不會 同時發揮功能。 互動行為諸如人與機器人的握手,擊掌,散步等等,由數個基本狀態機所組
成,互動行為與基本狀態機的關係如下圖所示: 狀態觸發旗標 ==Enabled? 執行狀態負 責之任務 結束條件滿 足? 下一狀態觸 發旗標 =Enable Yes No 狀態觸發旗標 狀態轉移暫 存器 基本狀態 狀態1 狀態3 狀態4 狀態5 行為控制 基本狀態 狀態2 基本狀態 圖 4-2 互動行為與基本狀態機 其中基本狀態機內部又可分為: (1) 「狀態觸發旗標」 當此旗標被致能(Enabled)時,代表機器人目前的行為由此狀態所掌控。 (2) 「狀態任務」: 該狀態主要負責之任務,根據不同的狀態機而有不同的定義。 (3) 「結束條件」: 各狀態之結束條件可由使用者自行定義,滿足結束條件時,進入下一個狀態。 (4) 「狀態轉移暫存器」: 每一個狀態機內均含有此暫存器,紀錄該狀態機結束後,下一個進入的狀態 機,由使用者自由設定,可指向自己或是其他不同的基本狀態機。
由任務類型來區分,基本狀態機主要可分為兩種:靜態感測狀態機,運動狀 態機,以下章節將介紹其任務。

![表 3-3 分離程度 J 對最終辨識率之影響 右足映射公式係數 T 3 分離程度 J 總辨識率 1 0.5, 2 0.5, 3 0, 4 1, 5 1cc cc c 82 69.9% 1 0.5 2 0 3 1 4 0.5 5 0.5c cc cc 583 95.6% 如表 3-3 所示,可發現選擇使資料分離程度較大的映射,於映射後分類器較 容易分辨不同的事件,可提升最終之辨識率。 [註]:以上資料為經過最終專家步驟](https://thumb-ap.123doks.com/thumbv2/9libinfo/8542973.187790/36.892.188.703.114.256/映射於映射後分類器較分辨事件註以上.webp)