利用差分演算法將非均勻天線最佳化
楊士杰、李坤洲 國立成功大學 系統與船舶機電工程學系 E-mail : [email protected]摘 要
本論文主要是使陣列元素調整到最佳化位置,使主波瓣和旁波瓣間之峰值差最大化,同時,對頻寬作 出限制,讓天線陣列在發射端與接收端得到良好的通訊品質的同時,也能顧及解析度與指向性。本研究首 先,把主波瓣、旁波瓣、半功率頻寬與通訊關係作解析,再用差分演算法,把陣列元素的位置最佳化,實 際結果也顯示差分演算法非常適用於解決天線陣列問題,使預設研究目標與執行效率達到平衡,成功的運 用演算法解決陣列最佳化問題。 關鍵詞:差分演算法、天線陣列、通訊、頻寬1. 前 言
通訊起源於人類自保的需要,用以互相通知食物出現或警告危機的來臨。原始人使用的信號、篝火以 及鼓聲所能傳遞的信號很有限。相傳遞比較複雜信號的願望,促使人類採用了鏡子與旗幟進行暗號形式的 通訊;但這些通訊方法也只能用在視力所及的範圍以內。最後,人類開始用電來進行通訊。直到今天,通 訊已在網路、廣播、電視、無線電、行動電話、雷達、導航等都有相當了不起的發展。通訊的快速發展, 拉近了世界人與人的距離,提高經濟效率,把人們的生活方式作了相當大的改變。 有線通訊和無線通訊起步並沒有太大差距,然之後將近一百年(西元1896 至 1980 年)無線通訊在 20 世紀一般人生活中幾乎缺席,不受到眾人的重視。直到20 世紀末的最後二十年,網際網路、行動電話才開 始出現,並且融入我們日常生活;新的通訊技術開始改變人類的生活與工作模式。2000 年初,世界已成為 無線通訊、手提式電腦,與網際網路整合商務後,市場的新契機。 天線在通信、廣播、電視、雷達和導航等無線系統中被廣泛應用,是有效的輻射和接收無線電波必不 可少的裝置。陣列天線的定義為一種由不少於兩個天線單元規則或隨機排列並通過適當激勵獲得預定輻射 特性的特殊天線。通常通訊陣列求解方式有兩種,一種是解析解,一種是數值解,當通訊陣列相當龐大時, 解析這種解法已經無法求解,所以在陣列相當龐大時多半採用數值方法求解。數值求解方式大致可分成梯 度法與隨機法兩種,隨機法較能避免區域解(local solution),可以增加找到全域解(global solution)之可 能性,但其缺點是需花相當可觀的時間。梯度法包含有牛頓法(Newton's method)、共軛梯度法(Conjugate gradient method)等等;梯度法處理速度極快,但是極易陷於區域解,且不易解決非線性且高維之問題;本 研究應用差分演算法,用以達成陣列場形圖之最佳化,透過調整陣列元素位置使最大化在主波瓣(Main beam)和旁波瓣(side lobe)間之峰值差,使旁波瓣極小化,且符合主波瓣束寬(beam width)限制條件。 [3][4][8]2. 陣列波束函數
單元天線架構,雖然具有較大的半功率頻寬(HPBW),但也有著較低的天線增益,所以在應用時往往 會受到限制。所以由數個相同的單位天線排列組合而成的陣列天線,正好可以滿足增益與輻射圖的需求, ©2007 National Kaohsiung University of Applied Sciences, ISSN 1813-3851
並同時集中接收或發射的能量於特定的方向,更可藉此有效地增加系統的傳輸距離。
……..
#0 #1 #2 #(N-1)θ
圖1 當單元天線用間隔 d 等距離排列的陣列天線。 我們描述陣列波束函數應用於通訊陣列之步驟,為簡化問題的複雜度,本章考慮N 沿直角座標軸排列 之線陣列元素,對第i 個陣列元素而言,其位置座標記為 di其波束函數可描述為: u jx N n n e n A f =∑
⋅ =1 ) (θ (1) 為了簡化繁瑣的問題,我們取實數: ﹚ u Xn k ﹙ cos ) ( 1 ⋅ ⋅ ⋅ =∑
= N n n A f θ (2) 其中K 為波速,是平面波的時間頻率 w 與傳播速度 C 之比值,記為: k= c w = λ2π (3) 其中 λ 為波長。每個天線元件與其相鄰的天線元件有著相位差,這會使的整個天線陣列輻射方向產生 一個固定的角度θ 0 0 sin sinθ− θ = u (4) 其中θ為入射角、θ 為操控角。 0 由調整陣列元素之排列位置與權重,求得主波瓣與副波瓣之最大差值。假設對稱陣列之中心元素固定 於座標原點,最外邊之元素則固定於線陣列兩旁的邊界上,因此,一權重為:[
]
T N a a a A= 1 2 L (5)位置為:
[
]
T n x x x X = 1 2 L (6) 對 f( )
θ
正規化,使 f( )
θ
最大值為1:( )
( )
( )
max θ θ θ f f f = (7) 訊號強度的表示法,通常以dB 表示,因此波束函數可調整為:( )
θ f =20.logf( )
θ dB (8) 主波瓣就是一個輻射圖中增益最大的波瓣,是為通訊的方向。旁波瓣是指主波瓣外,其他所有的波瓣, 因為旁波瓣並不是通訊的方向,所以希望能在限制條件下抑制旁波瓣。先找出所有峰值: Peak( )
a = f( )
θ > f(
θ+1)
& f( )
θ > f(
θ−1)
(9) 從峰值中,找出最大值及次大值,最大值即為主波瓣,次大值即為旁波瓣:peak
(
a)
>peak(
a+1)
>peak(
a+2)
(10)陣列長度與元素的排列方式依照不同輻射聲場的公式或選定的維度空間與外型,進行陣列長度與元素 排列的設計,陣列元素排放位置時常受到很多因素的影響,遭到各式各樣的限制,設計難度更增高。 天線陣列大多的設計目標為以主波瓣提高,但主波瓣的束寬可量化輻射的效率,主波瓣的束寬越窄, 代表其指向性越好,一般的天線可以當作發射端也可以當作接收端。當發射端使用時,需能量集中於目標, 才會讓發射端接收到完整且正確的信號;在作接收端使用時,因為只接收目標方向的能量,讓接收者在沒 有雜訊下,接收完整的訊號。所以在通訊的目標會希望主波瓣越窄越好,即主波瓣束寬要儘可能縮小,並 且要抑制旁波瓣,實際上,會在不得已的情況下產生旁波瓣,因旁波瓣若太高會接收到非通訊方向的訊號, 導致通訊方向會有雜訊,故須設法使旁波瓣越低越好,但降低旁波瓣又會讓主波瓣束寬變寬,又主波瓣束 寬變寬時,解析度不夠,指向性也會變差。所以,在追求窄的束寬與低的旁波瓣是兩相牴觸的。[13] 旁波瓣 主波瓣 圖2 束寬很小,旁波瓣很大示意圖。
旁波瓣 主波瓣 圖3 束寬很大,旁波瓣很小示意圖。 在本研究中,我們先追求讓主波瓣極大化、旁波瓣極小化,但同時也將對束寬做限制,以提升指向性。 輻射圖上的值是主波瓣峰值的 2 1 倍,則該點功率是主波瓣峰值功率的2 倍,故稱為半功率束寬。半波長 束寬又因每增加3dB 就增加了一倍的功率,每減少 3dB 就減少了一倍的功率,又稱 3dB 束寬,由此特性, 我們從0~90 度 fdB +3 找出最接近於零的數,故在將它乘以兩倍,即為 3dB 束寬。 3dB
( )
θ = fdB( )
θ +3≒0 (11)3. 差分演算法在陣列最佳化之應用
在生活中,每項問題都存在著許多不同的解,而這些解會依照每件事不同的需求產生不同的限制,此 類多元化選擇問題在數學或資料結構上將其稱之為 NP-HARD 問題,指的是所有尚未找到多項式解法的問 题類型。而在探究如何在盡可能滿足限制條件的情況下獲得最大的效益,就是所謂的最佳化的問題。 演化式計算是模擬大自然演化過程而建立的一種計算模式,透過群居式動物本身以及群體的行為啟發 而來,很多學者針對這樣的行為進行數學模型之建立,並提出相關演算法,藉此來求解傳統演算法難以解 決的組合最佳化問題,找出問題的最佳解。 最早出現的演化式計算為演化式規劃、演化策略以及基因演算法,此三種基本模式均以"天擇"概念 來進行運作,早期演化式演算法除了擁有本身容易落入區域最佳解之問題存在,還有流程複雜及求解能力 較差等等缺陷。而許多相關研究領域之學者為改善此一缺點,紛紛依循此一行為提出更多相關模式之演算 法,其中包含Holland 於 1975 年提出的基因演算法(Genetic Algorithm;GA)、Marco 於 1992 年所提出的 螞蟻演算法(Ant Colony Optimization;ACO)、Kennedy 和 Eberhart 於 1995 年提出的粒子群演算法(Particle Swarm optimization;PSO)及本文所研究的差分演化演算法(Differential evolution;DE)等,其目前發展至 今,演化式計算已被廣泛地運用在各種領域,特別是組合最佳化問題之中,包含工作排程、路徑規劃、網 路問題、資料探勘、人工智慧等,甚至機械、工程的設計,及化學工程領域中,也同樣有演化式計算的蹤 跡[1][2][7]1996 年 K. Price 和 R. Storn 為了解決 Chebychev Polynomial 的問題,討論利用差向量來搜尋、疊代的 構想來加以實現,進而提出差分演算法。差分演算法是近年來演化式計算的熱門演算法之一,差分演算法 是一種很容易應用的最佳化搜尋技術,它擁有強健、簡單、快速等進化的特性,與具有隨機搜尋的方法且
具優越的效能,因此常被應用於各種領域,如:資料探勘、電子工程、決策支援等,不過差分演算法也存 在容易陷入區域最佳解、收斂不穩定等缺點。[6][10] 差分演化演算法之概念是以向量為基礎,透過母體間個體之差異性,並以隨機搜尋方式將差異向量加 上其中之個體中,並透過突變(Mutation)、重組(Recombination)、選擇(Selection)三個步驟進行演化, 而透過迭代不斷地進行運算,並觀察個體是否能在搜尋解空間中找到最適解。差分演化演算法同樣運用了 群體智慧,透過生物演化概念,物種與物種間的競爭,具有優勢個體往往能成功存活下來,而不能適應環 境者則將遭到淘汰。差分演化演算法在結構上與基因演算法類似,均是以交配、突變為演化機制,但與基 因演算法相比,差分演化演算法更有參數設定簡潔,流程設計更為簡單之優點,且不同於基因演算法之演 化流程,差分演化演算法為先執行突變策略緊接著進行交配,並於最後一步驟才透過選擇機制將較差解淘 汰,也因每一迭代均會執行突變及交配之演化,比起基因演算法,又更有具有解之多樣性,其求解能力更 大幅超越傳統基因演算法。[12][14] 本研究採用差分演算法尋找最佳 D,在束寬限制條件下,令主波瓣與副波瓣有最大差距。每個步驟描 述如圖。 開始 設定適應函數,確定解的維度和範圍 隨機初始化粒子之位置和速 突變 圖4 差分演算法流程圖 是 重組 否 是否符合終止條件 選擇 結束
4. 結果與討論
本文研究目標是調整每個單元天線排列的位置,求得主波瓣與旁波瓣之最大差值。我們總共要作三個 例子,第一個例子是為對稱座標原點的對稱陣列,假設單元天線數 25,第一個天線位置固定在-50,第 25 個天線位置固定在 50,陣列第 13 個單元天線位置為座標原點,最佳化問題維度降為 11,任一單元天線不 能重複位置。第二個例子是第一個例子的延伸,相對於第一個例子,改變了每個天線位置權重。我們先跑 出最佳化的位置,再把每個天線位置得權重設定在 0 到 2 之間,再用最佳化的方式找出最適當的權重。第 三個例子也是第一個例子延伸,只是改作非對稱陣列,假設單元天線數 25,第一個天線位置固定在 0,第 25 個天線位置固定在 100,最佳化問題維度為 23。每個例子之模擬都將分為兩個部分都將操控角固定於零 度,取不同的入射角範圍,得到不同的副波瓣位準,當模擬不同的入射角範圍,所限制的半功率波束寬度 也不同。模擬第一部分是-30 度到 30 度,限制 beamwidth 為 2.3 度,模擬第二個部份取-90 度到 90 度,限 制beamwidth 為 4.6 度。 表1 例子一模擬結果 SLL(dB) θsll(degree) beamwidth(degree) 30 30≤ ≤ − θ 15.70 21.5 2.2 90 90≤ ≤ − θ 12.35 14.7 2.4 表2 例子一單元天線之最佳化位置 單元天線之最佳化位置 30 30≤ ≤ − θ 0、1. 5、2.5、4、7、9、10、12、14.5、17.5、 19.5、22.5、25 90 90≤ ≤ − θ 0、1.5、5、6、7、8、10、11.5、13、14.5、 15、16.5、25-90 -60 -30 0 30 60 90 -70 -60 -50 -40 -30 -20 -10 0 sll 圖5 例子一入射角取−90≤θ≤90之輻射圖 -30 -20 -10 0 10 20 30 -70 -60 -50 -40 -30 -20 -10 0 sll 圖6 例子一入射角取−30≤θ≤30之輻射圖
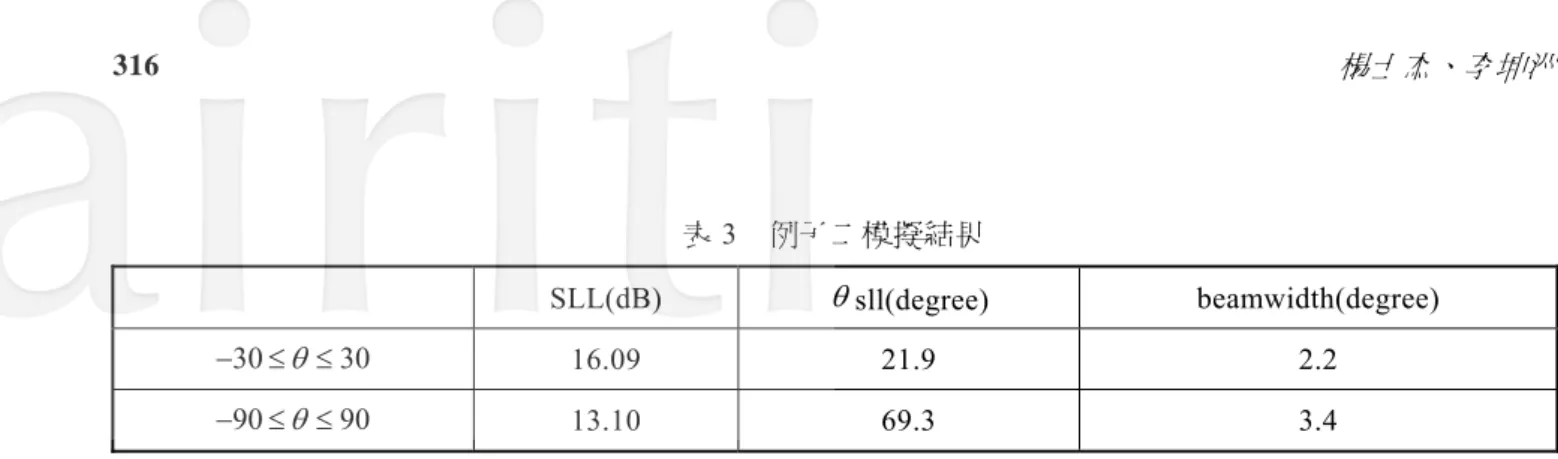
表3 例子二模擬結果 SLL(dB) θsll(degree) beamwidth(degree) 30 30≤ ≤ − θ 16.09 21.9 2.2 90 90≤ ≤ − θ 13.10 69.3 3.4 表4 例子二單元天線之最佳化位置 單元天線之最佳化位置 30 30≤ ≤ − θ 0、2.5、3、4、7、8.5、10.5、12、14.5、 18、21、22.5、25 90 90≤ ≤ − θ 0、1、3、4.5、6、7.5、9、10、11.5、13.5、 15.5、16.5、25 表5 例子二單元天線之最佳化權重 單元天線之最佳化權重 30 30≤ ≤ − θ 1.03、1.18、1.1、1.46、1.69、1.32、1.62、 1.32、1.69、0.98、1.2、1.2、1.13 90 90≤ ≤ − θ 1.12、1.87、1.5、1.98、1.78、1.8、1.2、0.88、 0.32、1.11、0.16、0.6、0.4 -90 -60 -30 0 30 60 90 -70 -60 -50 -40 -30 -20 -10 0 sll 圖7 例子二入射角取−90≤θ≤90之輻射圖
-30 -20 -10 0 10 20 30 -60 -50 -40 -30 -20 -10 0 sll 圖8 例子二入射角取−30≤θ≤30之輻射圖 表5 例子三模擬結果 SLL(dB) θsll(degree) beamwidth(degree) 30 30≤ ≤ − θ 16.64 10.4 1.6 90 90≤ ≤ − θ 15.25 53.1 1.2 表6 例子三單元天線之最佳化位置 單元天線之最佳化位置 30 30≤ ≤ − θ 0、2.5、3.5、4、4.5、6、7、7.5、8、9.5、 10、11.5、12、14、14.5、16、17.5、18、 19.5、20.5、24.5、27、30、35.5、50 90 90≤ ≤ − θ 0、2、3.5、5、7、8.5、10、14、15、16、17 17.5、18.5、19.5、21、22.5、23.5、25.5、 27.5、29、30.5、34.5、39.5、43、50
-90 -60 -30 0 30 60 90 -80 -70 -60 -50 -40 -30 -20 -10 0 sll 圖9 例子三入射角取−90≤θ≤90之輻射圖 -30 -20 -10 0 10 20 30 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 sll 圖10 例子三入射角取−30≤θ≤30之輻射圖 本研究主要是應用差分演算法於陣列之最佳化,透過差分演算法調整陣列元素之位置,藉以實行線性 陣列之旁波瓣極小化及主波瓣之寬度限制,有效率並且容易達到最佳目標。陣列場形圖之最佳化,透過調 整每個元素的位置而完成,可抑制旁波瓣,限制主波瓣的束寬寬度,以保持天線陣列之指向性。本研究使 用之差分演算法,與其他較主流的演化式演算法相較下,其具備的優勢包含參數設定數少、強健性、實作
容易、高準確性以及收斂快速等特性。從過去相關研究的實驗數據,可以發現差分演算法的優越優勢,在 陣列最佳化問題,差分演算法完成預定之目標,且最佳化過程迅速,已達成本研究之目的。