國
立 交 通 大 學
電機與控制工程學系
碩
士
論 文
以
TSMC .35um CMOS
製程設計及實現ㄧ
弛緩震盪器
Design and Implementation of a Relaxation Oscillator
Using TSMC .35um CMOS Process
研 究 生
:
王志全
指導教授
:
鄭木火 博士
以
TSMC .35um CMOS
製程設計及實現ㄧ
弛緩震盪器
Design and Implementation of a Relaxation Oscillator
Using TSMC .35um CMOS Process
研 究 生
:
王志全
Student
: Chih-Chuan Wang
指導教授
:
鄭木火 博士
Advisor
: Dr. Mu-Huo Cheng
國 立 交 通 大 學
電機與控制工程學系
碩士
論文
A Thesis
Submitted to Department of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering July 2008
Hsinchu, Taiwan, Republic of China
以
TSMC .35um CMOS
製程設計及實現ㄧ
弛緩震盪器
研究生
:
王志全
指導教授
:
鄭木火博士
國立交通大學電機與控制學系
中文摘要
本論文以
TSMC .35um CMOS製程實現一輸出為
1MHz之弛緩震盪器
,為實現
微機電電容式加速度規內的震盪器。 整個加速度規的架構
,前端以
MEMS的結構感測
震動
,而後端則是以交換電容的電路
,將感測到的電容變化轉換為電壓變化
,而交換電
容的電路
,就需要做時序控制
,因而需要一個震盪器以產生時序
,也就是本論文的研究
目的。
為了實現一個震盪器
,於是探討了環式震盪器、
LC震盪器以及弛緩
(relaxation)震盪器等數種震盪器形式
,經過分析其實現難易度以及所需規格之後
,選取結構最簡單
的弛緩震盪器來實現。
原本選用的弛緩震盪器內含一比較器及兩個電阻
,其後又改以史密特觸發器取代該
部分
,使得電路實現起來更小
;RC充放電的部份
,電容值是固定的
,而以一組傳輸閘取
代了電阻
,其導通者工作於飽和區以提供較大的充放電電流
;該電路做了兩個外接的控
制電壓
,使得晶片製成之後
,透過外部電壓的調整
,可以分別加快或減慢充電及放電的
速度
,以確實輸出
1MHz的頻率提供後續交換電容所需之時序。
實現過程包含了設計
MOS的長寬比以形成一史密特觸發器、 其觸發準位之分析
,以及驗證在外部電壓的調整下
,在
tt、
ff、
ss、
fs、
sf各個角落都能達到至少
0.5MHz ∼ 2MHz範圍的震盪頻率
;並於電路佈局後
,抽取出所有的寄生電阻電容
,模擬在
tt、
ff、
ss、
fs、
sf各個角落都能調整出
0.5MHz ∼ 2MHz的震盪頻率
;其後將晶片送往
CIC製作
,送製回來後的量測結果
,可以確實輸出
1MHz的震盪波形。
Design and Implementation of a
Relaxation Oscillator
Using TSMC .35um CMOS Process
Student: Chih-Chuan Wang
Advisor: Dr. Mu-Huo Cheng
Institute of Electrical and Control Engineering
National Chiao-Tung University
Abstract
This thesis uses the TSMC .35um CMOS process to design and implement a relaxation oscillator of 1MHz for MEMS capacitive accelerometer. The accelerom-eter consists of a capacitive sensor fabricated via the MEMS design and a sensor circuit usually designed with a switching capacitor circuit which converts the ca-pacitance variation into the voltage variation. The switching capacitor circuit needs a good control of time sequence and thus demands an oscillator to generate the clock signals; the design and implementation of the oscillator is the focus of this thesis.
We first survey several types of oscillators including ring oscillators, LC oscil-lators and relaxation osciloscil-lators; we evaluate their performances and the simplicity of realization. Hence the simplest relaxation oscillator is chosen for implementation in this thesis.
To simplify the circuit complexity, we use a Schmitt trigger to replace con-ventional circuits with one comparator and two resistors connected in positive feedback scheme. To adjust the oscillation frequency, in the RC pair for charg-ing and dischargcharg-ing we fix the capacitance value and apply a transmission gate as the resistor such that two external control voltages can be used for control-ling the charging and discharging current. Then, the oscillation frequency can
be controlled by these voltages to provide the switching capacitor circuit with an accurate 1MHz clock.
The critical steps in the implementation of the oscillator includes the design of W/L ratios in MOS transistors to form the Schmitt trigger, the analysis of the trigger levels of the Schmitt trigger, and the verification of at least an oscillator output with frequency range of 0.5MNz ∼ 2MHz at all five corners(tt,ff,ss,fs,and sf) after tuned by external control voltages. The same work is also applied after the layout and its circuit extraction have been made to ensure that the oscillator can export an oscillation frequency range of 0.5MNz ∼ 2MHz at all the corners. The design has been fabricated via CIC; the measure results show that the oscillator functions correctly and can output a clock with 1MHz oscillation frequency.
致謝
碩士學業得以順利完成
,最感謝的是我的指導教授鄭木火老師
,在學習期間的
諄諄教誨
,以及對學生的包容。 另外
,感謝論文口試委員中
,系上的蘇朝琴老師、 清華的
方維倫老師以及明新的莊正老師在口試時的指導
,使本論文更臻完善。
還要感謝學習過程中
,浩緯、 俊維、 啟峰、 信良幾位學長的提攜與關照
,以及嘉明、
皓淵、 衍禎、 宏揚、 佳華這些同學在修課過程中的從旁協助
,在求學過程中無形滋長的
友誼
,以及讓我很懷念的
,在兩任室友哲倫、 又勳陪伴下所度過的宿舍生活。
當然
,感謝家人在這段期間內各方面無條件的包容與支持
,讓我能夠無後顧之憂的
念書。 而在付梓完稿的最後
,僅以全部的光環與榮耀獻給陪伴我兩年
,我所心愛卻似乎
已遠走的梅子。
目錄
中文摘要
I英文摘要
III致謝
V目錄
VI表目錄
VIII圖目錄
IX 1簡介
1 1.1研究動機
. . . 1 1.2論文架構
. . . 1 2各種震盪器的回顧
3 2.1震盪器系統之基本觀念
. . . 3 2.2環式震盪器
. . . . 5 2.3 LC震盪器
. . . 14 2.3.1交叉耦合震盪器
Crossed-Coupled Oscillator . . . 18 2.3.2 Colpitts震盪器
. . . 19 2.4弛緩震盪器
. . . 23 2.4.1 R-C弛緩震盪器
. . . 23 2.4.2定電流震盪器
. . . 283
實現弛緩震盪器
33 3.1微機電電容式加速度規簡介
. . . 33 3.2弛緩震盪器電路及分析
. . . 34 3.2.1電路概念
. . . 34 3.2.2實作之電路
. . . 36 3.3電路佈局
. . . 39 3.4模擬結果
. . . 40 3.5晶片量測結果
. . . 41 4結論
48參考文獻
49表目錄
圖目錄
2.1回授系統
. . . 4 2.2震盪系統隨著時間的發展
. . . 4 2.3不同回授觀點的震盪系統
. . . 5 2.4單級回授
. . . 6 2.5兩個極點的回授系統
. . . 6 2.6兩個極點的回授系統外加一次訊號反轉
. . . 7 2.7兩個極點系統的迴路增益特性
. . . 7 2.8三階的環式震盪器
. . . 8 2.9三階環式震盪器的波形
. . . . 9 2.10三階環式震盪器的線性模型
. . . 11 2.11三階環式震盪器在不同增益下的極點位置
. . . 11 2.12 CMOS反相器作成的環式震盪器
. . . 12 2.13當其中一個節點以
VDD作為起始的環式震盪器的波形
. . . 12 2.14 (a)五階的單端輸出環式震盪器
(b)四階的差動環式震盪器
. . . 13 2.15四階差動環式震盪器各節點的波形
. . . 14 2.16 (a)理想與
(b)實際的
LC tanks . . . 15 2.17將串聯組合轉換為並聯組合
. . . 15 2.18把一個
tank轉換為三個並聯的元件
. . . 16 2.19 LC tank的
(a)大小
(b)相位與頻率的關係圖
. . . 172.21
兩個
tuned stages組成的回授電路
. . . 182.22
圖
2.21電路的迴路增益特性
. . . 182.23 (a)
圖
2.21的另ㄧ種畫法
(b)外加尾電流源以降低對供電的敏感度
. . 192.24 (a)
汲極回授至源極的
tuned stage (b)外加輸入電流以計算閉迴路增益
20 2.25將圖
2.24 (b)改成外加輸入電壓以計算閉迴路增益
. . . 212.26 (a) Colpitts
震盪器
(b)增加了輸入刺激的
(a)的等效電路
. . . 212.27
基本
RC弛緩震盪器的電路形式
. . . 24 2.28圖
2.27的輸出波形
. . . 24 2.29史密特觸發器的
(a)電路符號
(b)電壓轉換特性圖
. . . 25 2.30 R-C弛緩震盪器
,內含單一比較器形式的史密特觸發器
. . . 27 2.31 R-C弛緩震盪器
,內含雙比較器形式的史密特觸發器
. . . 29 2.32定電流充放電的震盪器基本電路組態
. . . 30 2.33圖
2.32的輸出波形
. . . 30 2.34使用可開關電流鏡的定電流充放電震盪器
. . . 31 2.35典型的壓控電流源
. . . 32 3.1機電電容式加速度規架構
. . . 33 3.2微機電電容式加速度規佈局
. . . 35 3.3弛緩震盪器電路
. . . 36 3.4圖
3.3中史密特觸發器的轉移曲線
. . . 36 3.5對
CT充電時
. . . 37 3.6對
CT放電時
. . . 38 3.7圖
3.3的模擬結果
. . . 39 3.8實作之弛緩震盪器電路
. . . 39 3.9開關之導通電阻
. . . 40 3.10輸入斜波以量測史密特觸發器準位
. . . 40 3.11圖
3.8中史密特觸發器之特性曲線
. . . 413.12 2.5MHz . . . 41 3.13 1MHz . . . 42 3.14 0.33MHz . . . 43 3.15 Layout . . . 44 3.16 tt . . . 45 3.17 ff . . . 45 3.18 ss . . . 46 3.19 fs . . . 46 3.20 sf . . . 47 3.21
量測結果
. . . 47Chapter 1
簡介
1.1
研究動機
由於參予了我們實驗室與清華方維倫老師實驗室所合作
,使用標準
CMOS製程實
現微機電電容式加速度規的實驗
,清華方面做的是以
MEMS的架構來感測震動
,而我
們做的電路
,則是以交換電容的電路
(switched-capacitor circuit)作後續的處裡
,將
MEMS結構感測到的電容變化
,轉換為電壓變化的訊號
,由於交換電容的電路需要時
序控制
,故需要一個震盪器產生控制的時脈
,也就是此篇論文討論的部份。
原本我們實驗室做的交換電容電路
,為了有更高的處理速度
,而選用矽鍺
35的製程
實現
,後來考量到此應用的前端是物理性的震動
,其振動頻率為
1KHz的範圍
,以
OSR為一千倍設想
,交換電容的切換以
1MHz來實現已足夠
,並且可以直接合併在一塊晶片
內
,降低實現成本
,於是改用
CMOS .35的製程。
1.2
論文架構
本篇論文分成四章所組成
,第一章簡介敘述了研究動機及論文架構。 第二章是各種
震盪器的回顧
,介紹了震盪器系統的基本概念、 環式震盪器、
LC震盪器
,及弛緩震盪
器
:環式震盪器的部份
,從不能震盪的反相器直接回授
,逐步討論至終於可以震盪的三
階環式震盪器、 五階環式震盪器
,及以差動方式實現的四階環式震盪器
; LC震盪器的
部份
,討論了
LC tank模型的轉換、 交叉耦合震盪器
,以及
Colpitts震盪器
;弛緩震
盪器的部份
,包含
RC弛緩震盪器以及定電流震盪器。 第三章的本文
,敘述了以標準
.35 CMOS製程
,實現一個震盪頻率為
1MHz之弛緩震盪器的過程
,包含了對內部
史密特觸發器觸發準位之分析
,以及驗證在外部電壓的調整下震盪頻率能否達到至少
0.5MHz ∼ 2MHz的範圍
;接著是電路佈局
,並於電路佈局後
,抽取出所有的寄生電
阻電容
,模擬在
tt、
ff、
ss、
fs、
sf各個角落是否都能調整出
0.5MHz ∼ 2MHz的震盪
頻率
;最後則是晶片送製回來後
,量測其確實可以獲得
1MHz的輸出波形。 第四章的
結論。
Chapter 2
各種震盪器的回顧
震盪器是很多積体電路系統的一部份
,應用範圍從微處理器的時脈產生器到手機的
carrier synthesis
都有
,需要很多種不同形式的震盪器及不同的工作參數
, CMOS技術
中
,強健的、 高性能的震盪器設計仍持續的有其挑戰性。 而震盪器通常是作在鎖相迴路
之中。
此章的內容所介紹的是震盪器的分析及設計。 從較概念性的回授系統說起
,會介紹
到環式震盪器、
LC震盪器以及弛緩震盪器。
2.1
震盪器系統之基本觀念
簡易的震盪器會製造出通常是電壓形式的週期性輸出
,如此
,則不需要任何的輸入
,該電路仍會維持永久的輸出。 而ㄧ個電路是如何震盪的呢
?從負回授系統的研讀可知
,其實震盪器可視為是設計出了問題的負回授系統。 考慮圖
2.1的單位負回授電路
,其
Vout(s) Vin(s) = H(s) 1 + H(s) (2.1)如果放大器在高頻的部分有過多的相位移
(phase shift),則整個負回授系統會轉為正
回授
,則震盪的狀況即會發生。 更正確的說
,如果
s = jω0, H(jω0) = −1 ,則在頻率
ω0時
,閉迴路增益會是無限大。 此狀況下
,在頻率
ω0時放大器會無限的放大其雜訊成
分。 事實上
,如圖
2.2所示
,頻率
ω0的雜訊會在經歷一倍的增益及
180度的相位移之
後
,成為和原訊號相反的訊號回到減法器
,則輸入訊號和其相反的訊號相減之後形成更
大的訊號
,造成頻率
ω0的成分持續的放大。
outV
( ) H s inV
+
-圖
2.1:回授系統
( ) H s+
-( ) H s+
-( ) H s+
-圖
2.2:震盪系統隨著時間的發展
為了使震盪發生
,必須有ㄧ倍或者更大的迴路增益
(loop gain)。 由圖
2.2可看出
,隨著訊號在迴路中跑了很多圈之後
,減法器的輸出會是一個幾何級數
(在
6 H(jω 0) = 180◦之下
) VX = V0+ |H(jω0)|V0+ |H(jω0)|2V0+ |H(jω0)|3V0+ . . . (2.2)如果
|H(jω0)| > 1 ,則上述的總和會發散
,而
|H(jω0)| < 1時
,則
VX = V0 1 − |H(jω0)| < ∞ (2.3)簡言之
,如果負回授系統的迴路增益滿足以下兩個條件
|H(jω0)| ≥ 1 (2.4) 6 H(jω0) = 180◦ (2.5)則該電路在頻率
ω0時會震盪。 此條件為必要而非充分
,稱為巴克豪森準則
( Barkhausen criteria )。 為確保震盪器在溫度及製程的變化之下仍能正常工作
,通常會設計迴路增益
為所需值的至少
2 ∼ 3倍。
我們可以說巴克豪森準則的第二項是
6 H(jω0) = 180◦或是總相位移為
360◦。
如圖
2.2所示
,如果設計的系統在低頻時為負回授
,在訊號走迴路一圈後
,該負號即提
供了
180◦的相位移
(如圖
2.1的減法器所示
),而
H(jω 0) = 180◦則為額外的頻率相
關
(frequency-dependent)相位移
,使得該負回授訊號增強了原訊號。 因此
,圖
2.3所
示的三種狀況皆為等效
,皆可表示該準則的第二項。 圖
2.3(a)中顯示了
180◦的頻率相
關相位移
(箭頭所示
)以及
180◦的
dc相位移
,而圖
2.3(b)和圖
2.3(c)的不同處在於
圖
2.3(b)中
,開迴路放大器
H(jω)包含了足夠的級數以及正確的極性使得頻率在
ω0時有
360◦的總相位移
;圖
2.3(c)中則是
H(jω)在頻率
ω 0時無相位移。 後面的內容中
+
-+
+
( )
a
( )
b
( )
c
(
)
H jw
H jw
(
)
(
)
H jw
180° 360° 0°®
+
®
+
®
圖
2.3:不同回授觀點的震盪系統
將會有這些不同型式的例子。
在現今的技術中
,CMOS震盪器主要以環式震盪器
(ring oscillator)或者
LC震盪
器
(LC oscillator)來實現
,如後述。
2.2
環式震盪器
數個增益級
(gain stage)繞成一個迴圈
,就形成了一個環式震盪器。 為了正確的實
現
,我們先試圖著使一階回授系統震盪。 如下的電路
,其開迴路僅有一個極點
,因此其頻
汲極發生反轉
,造成
180◦的直流相位移
,總和起來最大的相位移為
270◦ ,無法使震盪
訊號不斷增強。
L C DD V DR
outV
1 M圖
2.4:單級回授
上例暗示我們使用更多級造成更多的極點
,就可能造成震盪。 因此我們推測
,上述
的電路若修改為如下
,則信號通路上就會有兩個極點
,使得頻率相關的相位移可接近
180◦。
L C DD V DR
outV
1 M CL DR
2 ME
F
圖
2.5:兩個極點的回授系統
不幸地
,此電路在兩個共源級各發生ㄧ次信號反轉
,造成在接近零頻率時的正回授
特性
,將此電路鎖住
(latch up),而無法震盪。 亦即
,當
E點的電壓上升
,則
F點的電
壓下降
,使得
M1關掉
,因而
E點的電壓更是上升到
VDD為止
,而
F點的電壓亦降至
近於零
,形成一組穩態。
上述電路若在迴路中再加入一個理想的反相級
(inverting stage) (在任何頻率皆無
相位增益
),使得接近零頻率時為負回授
,解決掉上述
latch up的問題
,是否就能震盪
呢
?我們注意到此迴圈中有兩個極點
,分別在
E點和
F點的位置
,造成頻率相關的相
位移可達到
180◦ ,不過是發生在頻率近於無窮大時
,幾乎已無回路增益
,依舊無法同時
滿足巴克豪森準則的兩個式子
(圖
2.7 ),因此依舊無法震盪。
L C DD V DR
outV
1 M CL DR
2 M 1-Ideal
F
E
圖
2.6:兩個極點的回授系統外加一次訊號反轉
20 log |
H w
( ) |
( )
H w
Ð
(log axis)
w
(log axis)
w
-40dB/dec
p,E p,Fw
=
w
90
-
°
180 - °圖
2.7:兩個極點系統的迴路增益特性
前述的討論指出
,迴圈中
,我們需要更大的相位移
,暗示著如果上述
2.6中的反相級
含有一個極點
,則能提供足夠的相位移
,就可能造成震盪。 因此
,發展出圖
2.8的電路。
如果三級皆相同
,則回圈的總相位移
φ在
ω = ωp,E(= ωp,F = ωp,G)時可達
−135◦ ,而在
ω = ∞時可達
−270◦ ,因此
,在
ω < ∞時
φ已達
−180◦ ,而此時回路增益仍
可能大於或等於
1。 只要有足夠的迴路增益
,此電路確實可以形成一個環式震盪器。
L C DD V DR
outV
1 M CL DR
2 M L C DR
2 MF
E
G圖
2.8:三階的環式震盪器
去了解圖
2.8中每ㄧ級最小的電壓增益是具有有啟發性的
,若不考慮閘極與汲極重
疊造成的電容
(gate-drain overlap capacitance),並且把每ㄧ級的轉移函數寫為
−A0/(1+ s/ω0) ,則有如下的回路增益
: H(S) = − A 3 0 (1 + ωs0)3 (2.6)該電路唯有在頻率相關相位移等於
180◦時會震盪
,亦即在每一階都提供
60◦相位
移
,此時
tan−1 ωosc ω0 = 60◦ (2.7)因此
ωosc= √ 3ω0 (2.8)而為了使回路增益的大小在頻率為
ωosc時為
1,由下式
A3 0 [q1 + (ωosc ω0 ) 2]3 = 1 (2.9)可得
A0 = 2 (2.10)總結來說
,一個三階的環式震盪器
,每一階都有
2的低頻增益
,而在頻率為
√3ω0時震盪
,其中
ω0是每一階的
3dB頻寬。
現在我們來檢視圖
2.8中震盪器的三個節點的波形
,因為每一級都提供了
60◦的頻
率相關相位移
,以及ㄧ次低頻的訊號反轉
,所以每個節點和相鄰節點都有
240◦ (或者說
120◦ )的相位差
(圖
2.9 )。 可同時產生數個不同相位的波形
,是環式震盪器相當有用的
一個特性。
EV
FV
GV
圖
2.9:三階環式震盪器的波形
增益限制 ㄧ個很自然會想到的問題是
,如果圖
2.8中三階的環式震盪器其
A0 6= 2會
如何呢
?如果
A0 < 2 ,由巴克豪森準則可知該電路不會振盪
,但如果是
A0 > 2呢
?要回答此問題
,首先我們以一個線性的回授系統來模擬該震盪器
,如圖
2.10所示
,由於
Eq.( 2.6 )中的
H(s)帶有負號
,該負號已表現了訊號路徑上的三次訊號反轉
,故圖
2.10的回授形式為正回授。 整個電路的閉回路增益為
Vout(s) Vin(s) = − A3 0 (1+s/ω0)3 1 + A30 (1+s/ω0)3 (2.11)= −A 3 0 (1 + s/ω0)3+ A30 (2.12) Eq.( 2.12 )
的分母可展開為
(1 + s ω0 )3+ A30 = (1 + s ω0 + A0)[(1 + s ω0 )2− (1 + s ω0 )A0+ A20] (2.13)因此
,整個閉回路存在如下三個極點
: S1 = (−A0− 1)ω0 (2.14) S2,3 = [ A0(1 ± j √ 3) 2 − 1]ω0 (2.15)由於
A0本身為正數
,故第一個極點帶來的效果是一個指數衰退的項
: exp[(−A0 − 1)ω0t] ,該項在穩態時可被忽略。 圖
2.11為不同
A0時的極點位置圖
,當
A0 > 2時
,兩個共軛的複數極點帶有正實部
,因而造成了逐漸增大的正弦波形
,忽略
s的影響
,輸
出波形可寫為
Vout(t) = a exp( A0− 2 2 ω0t) cos( A0 √ 3 2 ω0t) (2.16)因此
,若
A > 2 ,則指數的部份會增長到無限大。
實作上
,當震盪的振幅增加
,訊號路徑上的每一級都會經歷非線性影響而逐漸達
到
”飽和
”,因而限制了最大的振幅
;我們可以說
,極點發生在右半平面
,並逐漸的往虛
軸移動以阻止信號不斷的增大。 如果小信號的回路增益大於
1,整個電路要花更多的時
間在飽和狀態
,使得
”平均
”回路增益仍為
1。
圖
2.12所示為一個不需要電阻的簡易環式震盪器的實現方式。 假定每個節點的電
壓開始時都在反向器的
trip point上
(反向器的輸出值會同於輸入值的點
),在每一階都
out
V
inV
+
-3 0 3 0 A s (1 ) w -+
圖
2.10:三階環式震盪器的線性模型
jw s 0 3w -jw s 0 3w -jw s 0 3w -0 0<A <2 0 A =2 0 A >2圖
2.11:三階環式震盪器在不同增益下的極點位置
完全相同並且沒有雜訊的情況下
,該電路會ㄧ直維持在此初始的狀態上
,但實際上雜訊
的成分會干擾每個節點的電壓
,使得波形不斷變大
,直到訊號成為軌對軌
(rail-to-rail)的情況。
現在我們假定圖
2.12中的電路在
VX = VDD的狀況下起始
(圖
2.13 ),此時
VY = 0而
VZ = VDD ,當電路被釋放後
, VX開始降至零
(因為第一個反相器偵測到高的輸入
電壓
),迫使
VY在一個反相器延遲時間
TD之後上升至
VDD ,又一個反相器延遲時間
TD之後
VZ降至零。 每隔一個
TD就有一個相鄰的節點要變動
,造成整個電路以
6TD為其震盪週期。
上述的小訊號以及大訊號分析導致了一個有趣的問題
,當小訊號的振盪頻率給定為
√ 3A0ω0/2 [由
Eq.( 2.16 )而來
],而大訊號的振盪頻率為
1/(6TD) ,此二值是否相等
?答案是未必
,畢竟
, ω0是在靠近
trip point時
,由每個反相器的小訊號輸出電壓和電容
X Y Z X V Y V Z V t
圖
2.12: CMOS反相器作成的環式震盪器
D T D T D Tt
DDV
XV
YV
ZV
圖
2.13:當其中一個節點以
VDD作為起始的環式震盪器的波形
所決定
,而
TD是大訊號時
,每一級的電容以及非線性電流驅動所決定。 換言之
,當電路
在每個反相器都在其
trip point的狀況下被釋放之後
,起先震盪器以
√3A0ω0/2的頻
率震盪
,當其震幅增大使得電路變得非線性之後
,震盪頻率則變為
1/(6TD) ,該值是個
比較小的值。
包含三階以上的環式震盪器也是可實現的
,回路上的反相器總數必須是奇數整個電
供了
1/(10TD)的振盪頻率。 而另一方面
,若以差動的方式實現
,則可以出現偶數的級
數
,此彈性亦展現了差動電路優於單端輸出的電路之處。
(a) (b) 1 X X2 X3 X4 1 Y Y2 Y3 Y4圖
2.14: (a)五階的單端輸出環式震盪器
(b)四階的差動環式震盪器
以類似圖
2.8的方式實現四階的差動環式震盪器
,我們有
H(s) = − A 4 0 (1 + ωs0)4 (2.17)為了使該電路能震盪
,每一階必須提供
180◦/4 = 45◦的頻率相關像位移
,發生的頻率
在於
tan−1ω osc/ω0 = 45◦ ,因此
ωosc= ω0 ,而最小的電壓增益可由下式導出
A0 q 1 + (ωosc ω0 ) 2 = 1 (2.18)也就是
A =√2 ,是一個比三階時更低的值。
有了每一級
45◦的相位移
,該震盪器提供了四個相位及其各自的反相
,如圖
2.15所
示。
環式震盪器的階數
,由很多不同的需求所決定
,包刮速度、 功率消耗、 雜訊免疫等
等
,在大多數的應用中
,三至五階有最好的表現
(以差動方式實現
) [1] [2] [3] [4] [5] [6] [7]。
D
T
t
X1V
Y1V
Y2V
X2V
X3V
Y3V
X4V
Y4V
圖
2.15:四階差動環式震盪器各節點的波形
2.3
LC
震盪器
過去十年內
,高值的電感逐漸出現在
BJT和
CMOS的技術中
,利用被動元件設計
震盪電路逐漸變得可行
,在看這樣的震盪器之前
,我們先稍為復習ㄧ下
RLC電路的基
本特性。
如圖
2.16 (a)所示
,將電感
L1和電容
C1並聯
,會造成
ωres = √L1C1的震盪頻
率
,在此頻率之下
,電感的阻抗
jL1ωres和電容的阻抗
1/(jC1ωres)ㄧ樣大而異號
,於
是並聯後阻抗為無限大
,我們說該電路有無限大的品質因素
Q(quality factor)。 然而
,實際上電感
(和電容
)都會有電阻的成分
,舉例而言
,做成電感的金屬導線
,其上的電組
可以圖
2.16 (b)的模型來表示
,我們將此電感的
Q值定義為
L1ω/Rs ,此電路的等效
阻抗為
Zeq(s) = Rs + L1s 1 + L1C1s2+ RsC1s (2.19)因此
|Zeq(s = jω)|2 = R2 s+ L21ω2 (1 − L1C1ω2)2+ Rs2C12ω2 (2.20)也就是說
,無論在任何
s = jω ,其等效阻抗都不會到達無限大
,我們稱該電路具有有
限的
Q值
,( 2.20 )式中
Zeq的大小在
ω = 1/√L1C1附近達餘頂峰
,不過實際的震盪
頻率與
Rs也有關聯。
1 C s R 1 L ( )a ( )b 1 C 1 L圖
2.16: (a)理想與
(b)實際的
LC tanks圖
2.16(b)的電路可以被轉換成另一種等效而容易分析設計的形式。 為達此目標
,首先我們考慮
,在一個狹窄的頻率範圍內
,圖
2.17(a)中串聯的組合可轉換為圖
2.17(b)中的並聯組合
,為了使二者的阻抗相當
L1s + Rs = RpLps Rp+ Lps (2.21) s R 1 L ( )a ( )b P L RP圖
2.17:將串聯組合轉換為並聯組合
只考慮穩態響應
,我們假定
s = jω ,重寫
( 2.21 )式為
(L1Rp+ LpRs)jω + RsRp− L1Lpω2 = RpLpjω (2.22)此式必須
(在一個狹窄的範圍內
)對所有的
ω都成立
,於是有
L1Rp+ LpRs = RpLp (2.23)RsRp− L1Lpω2 = 0 (2.24)
計算第二式中的
Rp並帶入第一式
,可得
Lp = L1(1 + R2 s L2 1ω2 ) (2.25)由於
Q = L1ω/Rs ,而ㄧ般高值的電感此值都高於
3,所以
Lp ≈ L1 (2.26)且
Rp ≈ L2 1ω2 Rs (2.27) ≈ Q2Rs (2.28)換句話說
,並聯的電路有相同的電抗
,而電阻值是原本串聯電路的
Q2倍。 此概念亦適
用於一階的
RC電路
,而其
Q值要定義為
1/(Cω)/Rs。
1 C s R 1 L ( )a ( )b P C P L RP圖
2.18:把一個
tank轉換為三個並聯的元件
由上述的討論可得圖
2.18中的轉換
,其中
Cp = C1 ,而當
ω遠離震盪頻率
,此等效
即不成立。
有了以上的了解
,可輕易得知在
ω1 = 1/ q LpCp時
,一個
tank可簡化到只剩下一
個電阻
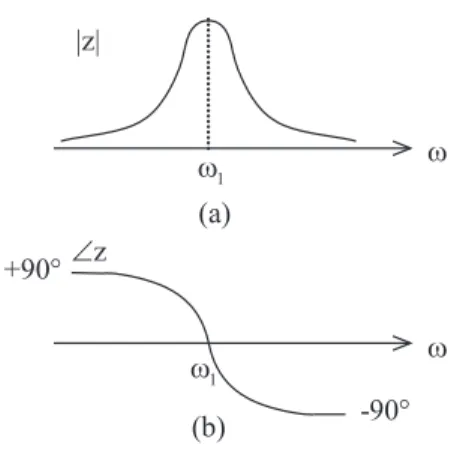
,tank中電壓和電流的相位差降至零。 繪出
tank阻抗的大小值對頻率的關係圖
|z| z Ð +90° -90° w w 1 w 1 w (a) (b)
圖
2.19: LC tank的
(a)大小
(b)相位與頻率的關係圖
[圖
2.19(a)],我們注意到當
ω < ω1時
tank像個電感
,而當
ω > ω1時像個電容
,於是
我們推測
tank的阻抗其相位在
ω < ω1時為正而在
ω > ω1時為負
[圖
2.19(b)]。
接著考慮圖
2.20(a)中的
”調整過的
”階級
,其中的
LC tank是做為負載用
,震盪時
, jLpω = 1/(jCpω) ,電壓增益為
−gm1Rp (注意頻率近於零時
,此電路的增益甚小
)。
若
將輸出端與輸入端相接
[圖
2.20(b)],此電路是否會震盪呢
?由於在震盪頻率時
,迴圈的
總相位移是
180◦ (而非
360◦ ),且由圖
2.19(b)可知頻率相關相位移從未達到
180◦ ,故
該電路不會震盪。
( )a ( )b P C P L RP out V in V M1 P C P L RP out V 1 M DD V VDD2.3.1
交叉耦合震盪器
Crossed-Coupled Oscillator
假定我們串接了兩級如圖
2.20 (a)中的電路
,如圖
2.21所示
,雖然類似圖
2.5的電
路
,但由於此電路的低頻增益很低
,故不會有前述鎖住
(latch up)的問題
,而在震盪頻
率時
,每一階所造成的頻率相關相位移都是零
,固迴圈的總相位移是零
,也就是說只要
gm1Rpgm2Rp ≥ 1 ,該迴路就會震盪。 由圖
2.22不難看出
,該電路無法在其他任何的頻
率下震盪。 另外
, Vx和
Vy是差動的波形。
P C P L RP 1 M P C P L RP out V 2 M DD V X Y圖
2.21:兩個
tuned stages組成的回授電路
1 |H | 1 H Ð +90° -90° w w 1 w 1 w 2 |H | 2 H Ð +90° -90° w w 1 w 1 w 1 2 |H H | 1 2 H H Ð +180° -180° w w 1 w 1 w圖
2.22:圖
2.21電路的迴路增益特性
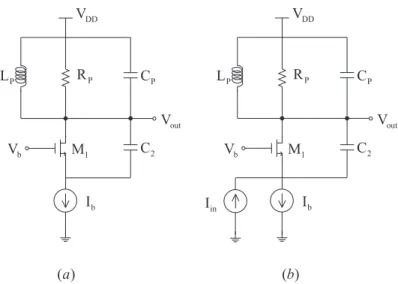
圖
2.21中的電路是很多
LC震盪器的核心
,有時候被繪成如圖
2.23 (a)的樣子
,M1
和
M2的汲極電流和
output swing都深受
supply voltage的影響
,由於節點
X和
Y上的電壓為差動的波形
,圖
2.23 (a)的
M1和
M2可轉換成如圖
2.23 (b)中的差動
對
,總驅動電流由
ISS所定義。
PC
PL
R
P 1M
PC
R
PL
P 2M
DDV
X
Y
SSI
(a)
(b)
PC
PL
R
P 1M
PC
R
PL
P 2M
DDV
X
Y
圖
2.23: (a)圖
2.21的另ㄧ種畫法
(b)外加尾電流源以降低對供電的敏感度
2.3.2
Colpitts
震盪器
其實
LC震盪器是可以只用一個電晶體來實現的。 再重新考慮圖
2.20 (a)的電路
,不能將汲極椄至閘極的原因
,是因為如此接法會造成在震盪頻率時
,總相位移會是
180◦而非
360◦。 另外
,在共閘極時
,源極至汲極的相位移為零。 於是我們總結以上二者可得
如圖
2.24 (a)的接法
,將汲極的電壓回椄至源極而非閘極
,並透過電容耦合以避免影響
M1的直流偏壓點
,則電路應該會震盪。
然而由於迴路增益不夠大
,會使得圖
2.24 (a)的電路無法震盪。 我們加個輸入電流
( )a ( )b P C P L RP b V M1 DD V b I 2 C out V P C P L RP b V M1 DD V b I 2 C out V in I
圖
2.24: (a)汲極回授至源極的
tuned stage (b)外加輸入電流以計算閉迴路增益
以驗證之
,如圖
2.24 (b)所示
,若忽略寄生電容
,閉迴路增益為
Vout Iin = Lps k 1 Cps k Rp (2.29) ,回想對於圖
2.1的觀點
,震盪器被視為是一個擁有無限大閉迴路增益的回授系統
,由
於此閉迴路增益無論在任何頻率都不會是無限大
,故此電路無法震盪。
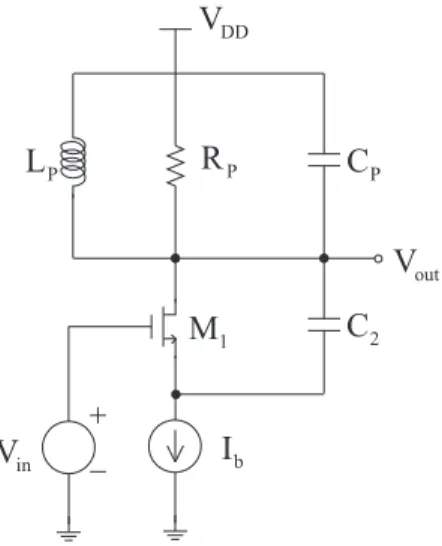
若改成從閘極加個輸入電壓
,也會得到相同的無法震盪的結果
,如圖
2.25所示
,如果偏壓的電流源是理想的話
,有限的
Vin變動對於
Ib所造成的變化仍為零
,若忽
略
source-bulk間的電容
, tank的電流變化亦為零
,致使
Vout/Vin = 0 ,也就是說雖然
Vx
跟著
Vin變化
,但是
M1產生一個小信號電流流過
C2去抵銷他。
以上的討論有兩個重點
,第一個是
,要使電路震盪起來
,輸入的刺激可加在不同的
地方
(因為迴路中任何裝置上的雜訊都可起始震盪
),第二
,圖
2.25中
Vout/Vin為零是
因為
M1的源極和
GND之間的阻抗是無限大
,於是我們在此節點和
GND之間外加
個電容
,如圖
2.26(a)所示
,來尋找震盪的情形
,注意到我們移除了原本和電感並聯的電
容
,原因後述。
以一個電壓相依電流源來取代
M1 ,我們得到了圖
2.26(b)的等效電路
,因為流
過
Lp和
Rp的並聯組合的電流為
Vout/(Lps) + Vout/Rp ,故流過
C1的總電流為
P C P L RP 1 M DD V b I 2 C out V in V
圖
2.25:將圖
2.24 (b)改成外加輸入電壓以計算閉迴路增益
1 C P L RP 1 M DD V 2 C out V b V P L RP 1 C 2 C out V 1 V in I m 1 g V (a) (b)圖
2.26: (a) Colpitts震盪器
(b)增加了輸入刺激的
(a)的等效電路
Iin− Vout/(Lps) + Vout/Rp ,
可得
V1 = −(Iin− Vout Lps − Vout Rp ) 1 C1s (2.30)將流過
C2的電流寫為
(Vout+ V1)C2s ,我們將流過輸出節點的所有電流相加得到
−gm(Iin− Vout Lps − Vout Rp ) 1 C1s + [Vout− (Iin− Vout Lps − Vout Rp ) 1 C1s ]C2s + Vout Lps +Vout Rp = 0 (2.31)
於是可得
Vout Iin = RpLps(gm+ C2s) RpC1C2Lps3+ (C1+ C2)Lps2+ [gmLp+ Rp(C1+ C2)]s + gmRp (2.32)若是
C1 = 0 ,則
( 2.32 )式可簡化為
(Lps k Rp) ,若
( 2.32 )式的分母在某個
s值
, SR= jωR ,之下為零
,則此時閉迴路增益為無限大
,該電路可震盪
,在此頻率之下以下
二式必須滿足
−RpC1C2Lpω3R+ [gmLp+ Rp(C1+ C2)]ωR = 0 (2.33) −(C1+ C2)LpωR2 + gmRp = 0 (2.34)在ㄧ般的典型值之下
,會有
gmLp ≪ Rp(C1+ C2) ,於是由
( 2.33 )式可得
ω2 R= 1 LpCC11+CC22 (2.35)而由
( 2.34 )式可得
gmRp = (C1+ C2)2 C1C2 (2.36) = C1 C2 (1 + C2 C1 )2 (2.37)由於
gmRp是
M1的源極至輸出的電壓增益
(如果
gmb = 0 ),我們可藉由決定
C1/C2的比值得知最小的必需的增益值
,經推導可知在
C1/C2 = 1時可得此值
,亦即我們需
要最小的增益為
gmRp ≥ 4 (2.38)由
( 2.38 )式可知
,比起圖
2.23(b)的
Crossed-Coupled震盪器
, Colpitts震盪器有個
明顯的缺點
,在於它需要至少
4倍的電壓增益
,而前者只需要
1倍
,如果電感有低
Q值
(
也就有小的
Rp )的問題
,則此議題就會變得嚴重
,然而這是
CMOS技術中常有的情
形
[1] [8] [9] [10] [11] [12] [13] [14] [15] [16]。
2.4
弛緩震盪器
弛緩振盪器
(relaxation oscillator),亦稱為
multivibrators,在大型的
IC設計中是
最常被用到的震盪器形式
,其內部有個計時電容
,並有設定好的兩個臨界電壓準位
,以
不斷地對計時電容做充放電
,使其上之電壓不斷來回於兩個臨界電壓準位之間為其操作
方式
,如此所造成的週期波
,頻率便與計時電容的大小成反比。
弛緩震盪器可依其電路形式
,分為以下幾種
: 1. RC弛緩震盪器
,以電阻性的路徑對電容做充放電。
2.定電流充放電震盪器
,以電流源對電容作充放電。
後面的內容將討論這些不同形式的電路。
2.4.1
R-C
弛緩震盪器
RC弛緩震盪器基本的電路構想如圖
2.27所示
,由三個單元所組成
: (1)一組用來
計時的
R1、
R2及
C1 , (2)具有磁滯現象的準位偵測比較器
(即史密特觸發器
), (3)接地的開關
S1 ,通常是個被驅動在關閉和飽和之間的
npn電晶體。
史密特觸發器的部份
,會被設計為具有高輸入阻抗
,低輸入偏壓電流
,以及近於理
想的切換特性
,如圖
2.29所示
,其有兩個臨界電壓
, VA和
VB , VA低於
VB ,當輸入
電壓不斷升高
,到達高的臨界電壓
VB ,輸出的狀態就會改變
,反而造成輸入電壓不斷
降低
,直到輸入電壓降至低臨界電壓
VA時
,輸出才又回到先前的狀態。 史密特觸發器
的淨磁滯電壓
(net hysteresis voltage) VB− VA ,在適當的電路設計之下
,可以是個很
穩定且可預知的數值。
2 R CC +V 1 R 1 C O1 V 1 S O2 V
圖
2.27:基本
RC弛緩震盪器的電路形式
B V AV
LV
1 O V 2 OV
t
t
2 TT
1 HV
1 S open 1 S closed 1 R C1 1 t = 2 (R //R )C1 2 1 t =圖
2.28:圖
2.27的輸出波形
是開著的
,計時電容上的跨壓
VO1以
τ1為時間常數
,往
+VCC做指數上升
,其中
τ1 = R1C1 (2.39)(b)
O1V
O2V
Input
Output
O1V
BV
O2V
AV
O2 H (V ) O2 L (V ) HV
(a)
圖
2.29:史密特觸發器的
(a)電路符號
(b)電壓轉換特性圖
當
VO1達到史密特觸發器的高臨界電壓
VB ,輸出就會改變狀態
,致使開關
S1接
上
,電容上的跨壓於是改以
τ2為時間常數
,往一個低的電壓準位
VL做指數下降
,其中
VL= VCC R2 R1 + R2 (2.40) τ2 = (R1 k R2)C1 (2.41)如果所選的
R1和
R2 ,其電阻值致使
VL< VA ,則在
VO1 = VA時史密特觸發器
將改變狀態
,使得開關
S1又打開
,電容
C1的跨壓於是又往
+VCC指數上升
,如此不
斷循環
,造成輸出端週期性的波形
,如圖
2.28所示。
由低臨界電壓
VA上升至高臨界電壓
VB所需的時間
,可表為
T1 = τ1ln( VB− VA VCC− VA ) (2.42)類似的
, VO1的電壓由
VB降至
VA的時間如下
T2 = τ2ln( VB− VA VB− VL ) (2.43)總震盪週期
T即為
T1+ T2 ,震盪頻率可寫為
f = 1 T = 1 T1+ T2 (2.44)或者
f = 1 R1C1 [ln(VCC − VA VCC− VB ) + R2 R1+ R2 ln(VB− VL VA− VL )]−1 (2.45)由圖
2.27所得到的電路
,有個很常用到的情形
,便是使
R2 ≈ 0 (亦即
T1 ≫ T2 ),輸出即為一長串的脈衝波
,在此應用我們通常會選定能夠造成
VCC − VA VCC− VB = e (2.46)的電壓準位
VA和
VB ,使得
( 2.45 )式簡化為易於設定頻率的表示式
f = 1 R1C1 (2.47)史密特觸發器其臨界電壓的準確度及穩定性
,直接影響到震盪器頻率的穩定性以及
頻率設定的準確度
,使得史密特觸發器的設計成為
IC弛緩震盪器設計中相當關鍵的一
環
,數位設計的史密特觸發器已經廣泛的發展出了許多形式
,然而大部分的此種電路都
無法達到高性能弛緩震盪器在頻率穩定性及頻率設定準確度上的要求。 下面介紹兩種
在
monolithic弛緩震盪器中常用到的史密特觸發器
,一種僅有單一比較器
,而另ㄧ種
有兩個比較器。
圖
2.30所示為一般的
R-C弛緩震盪器電路
,使用的是單一比較器形式的史密特
觸發器
(虛線部分
),震盪器的操作簡述如下
:一開始開關
S1和
S2都是打開的
,電容
C1的跨壓
VO1以指數的型式往
VCC上升
,當
VO1上升至高臨界電壓
VB VB= VCC RB+ RC RA+ RB+ RC (2.48)時
,比較器會改變輸出為一
,致使正反器輸出為一
,使開關
S1和
S2接上
,而
S2的接
上使得原本設定臨界電壓值的
RC短路
,形成一個新的臨界電壓
VA , VA= VCC RB RA+ RB (2.49)CC
V
1R
BR
1C
R
S
Q
Comparator
R-S flip-flop
Schmitt trigger
AR
CR
2R
1S
O1V
O2V
A
圖
2.30: R-C弛緩震盪器
,內含單一比較器形式的史密特觸發器
其中
VA < VB ,此時
S1是接上的
,於是電容
C1上的跨壓
VO1指數下降
,降至低臨界
電壓
VA時
,比較器再度改變狀態
,輸出為零使得正反器重置
,正反器亦輸出零使得開
關
S1和
S2再度成為開路
,如此週而復始形成震盪。 上述的震盪過程
,使得
C1上的跨
壓為介於兩個臨界電壓
VA和
VB間的指數型斜波
,如圖
2.28中的波形
,史密特觸發器
的磁滯電壓
VH主要由
(藉由開關不斷的進入和消失在電路中的
) RC所決定
: VH = VB− VA= VCC RARC (RA+ RB+ RC)(RA+ RB) (2.50)值得注意的是兩個臨界電壓
VA和
VB ,以及磁滯電壓
VH都與供電
VCC成正比
,而
由於
R1是連接至
+VCC ,使得
C1的充放電電流亦正比於
VCC ,於是
,當
VCC上升
時
,磁滯電壓
VH (決定
VO1的振幅
)上升
,而指數型斜波的斜率亦等量上升
,於是
VCC對二者產生的效果相互抵銷
,因此對一階而言
,震盪器的頻率
( 2.45式
)和供電
VCC無
關。 不過
VO1的輸出振幅和
VCC成正比。
圖
2.31所示的震盪器
,內含雙比較器形式的史密特觸發器
,第一個比較器
( com-parator 1 )在計時電容
C1的跨壓
VO1達高臨界電壓
VB時改變狀態
,而第二個比較
器在
VO1達於低臨界電壓
VA時改變狀態
,此二臨界電壓個別由如下的電阻比所決定
VB = VCC RB+ RC RA+ RB+ RC and VA = VCCRC RA+ RB+ RC (2.51)因此
,磁滯電壓
VH為
VH = VB− VA = VCC RB RA+ RB+ RC (2.52)我們以
S1為開路做為起始
,此時
VO1往
VCC做指數上升
,當其達到
VB時
,第
一個比較器改變狀態
,輸出為一
,對正反器作
set的動作
,致使開關
S1接上
,於是開始
放電的半週
;當放電至
VO1低於低臨界電壓
VA時
,第二個比較器改變狀態
,亦輸出一
,對正反器作
reset的動作
,致使開關
S1又打開
,如此循環震盪下去。 如較早所述
,雖然
VA和
VB都與
VCC成正比
,然而對
C1而言其充放電電流亦與
VCC成正比
,致使震
盪器的震盪頻率
f ( 2.45式
),就一階而言
,與供電
VCC無關。
2.4.2
定電流震盪器
定電流充放電形式的震盪器
,其用來對計時電容充放電的是電流源而非電阻
,圖
2.32所示為此類型弛緩震盪器的ㄧ般化結構
,一般而言
,此種震盪器有兩個電流源
,電
流源
I1總是開著
,而電流源
I2則是間歇性的開開關關。 在
I2關著的時候
,定電流
I1不斷的對
C1充電
,直至
C1上的跨壓
VO1到達史密特觸發器的高臨界電壓
VB ,致使
史密特觸發器改變輸出狀態
,使得間歇性的電流源
I2導通
,其中
I2必須大於
I1 ,於是
電容
C1便以
I2 − I1的電流放電
,一直放電到
VO1低於低臨界電壓
VA ,於是史密特
觸發器再次改變輸出
,而將電流源
I2關閉
,如此不斷循環。 此電路的震盪波形
,會是線
性的斜波
,如圖
2.33所示
,充電過程的時間
T1為
T1 = (VB− VA)C1 I1 (2.53)CC
V
1R
BR
1C
S
R
Q
Comparator 1
R-S flip-flop
Schmitt trigger
AR
CR
2R
1S
O1V
O2V
A
Comparator 2
BV
AV
圖
2.31: R-C弛緩震盪器
,內含雙比較器形式的史密特觸發器
類似的
,放電過程的時間為
T2 = (VB− VA)C1 I2− I1 (2.54)整個震盪的頻率可表為
f = 1 T = 1 T1+ T2 = I1 (VB− VA)C1(1 − I1 I2 ) (2.55)圖
2.32中的史密特觸發器
,可以是單一比較器
(圖
2.30 )或者雙比較器
(圖
2.31 )的任一型態
,在大部分雙比較器的形式中
,第一個比較器會使用
npn輸入而第二個比
CC +V 1 I 1 C O1 V O2 V 2 I
圖
2.32:定電流充放電的震盪器基本電路組態
B V AV
1 O V 2 OV
t
t
2 TT
1 2 I on I2 off 1 1I
slope :
C
2 1 1I - I
slope :
-C
圖
2.33:圖
2.32的輸出波形
較器會用
pnp輸入的組態
,因為這樣的組態可降低由於比較器輸入端的有限偏壓電流
所引起的頻率誤差。
在圖
2.32中的基本電路組態中
,為了能夠對震盪頻率提供線性的控制
, I1和
I2的
變化必須同步
,然而圖中的
I1為
pnp定電流源而
I2為
npn電流源
,無法達到同步的要
求。 我們改以圖
2.34的電路來解決此問題
,圖中兩個電流源是相似的
pnp電流源
,以
可開關的電流鏡來產生間歇性的電流源
I2 ,放電時
,Wilson電流鏡導通
,電容
C1以
I2− I1的電流放電
,充電時
,將開關
S1接上
,使得電流鏡關閉
,而電容以
I1的電流充
電。 通常我們以
E端接地的
npn電晶體來形成開關
S1。 由於兩個電流源
I1和
I2有
相同的極性
,而有不同的大小
( I2 > I1 ),我們可用單一的控制電壓來控制電流大小
,而不去改變到兩個電流間的比值。 於是
,我們可透過一個外接的電壓來控制震盪器的頻
率
,卻不影響到輸出的波型以及
duty cycle。
CC +V 1 I 1 C O1 V O2 V 2 I C V 2 ( I ) 1 Q 3 Q 2 Q 1 S圖
2.34:使用可開關電流鏡的定電流充放電震盪器
壓控電流源的部份
,其中一個最常用在振盪器的電路組態如圖
2.35所示
,稱為
composite pnp-npn電流源組態
,電路中
,假定
Q1和
Q2的
VBE幾乎相同
,則
Q2的射極電壓很接近於控制電壓
VC ,若我們忽視
Q2基極的電流
,則輸出電流
Io直接
正比於
Ro上的跨壓
Io= VCC− VC Ro (2.56)一般
Ro都做在電路外部
[17] [18] [19] [20]。
1
Q
oR
CC+V
oI
CV
Control voltage
3Q
2Q
CC+V
CV
xI
CC C o oV
V
I
R
-=
圖
2.35:典型的壓控電流源
Chapter 3
實現弛緩震盪器
3.1
微機電電容式加速度規簡介
圖
3.1:機電電容式加速度規架構
首先
,概要的描述一下我所做的震盪器所屬的微機電電容式加速度規
,其架構如圖
3.1所示
,MEMS-Senser藉由電容的變化感測震動幅度
,其後在
Chopper-Stabilized放
大器中
,將電容低頻變動訊號使用
Chopper方法將其頻譜提昇至較高頻率放大
,之後
再用
Chopper方法將其訊號還原。 最後為輸出緩衝器及低頻濾波器方塊
,使用
Opamp來當緩衝器以推動後端低頻濾波器
,低頻濾波的目的是除去
Chopper時所產生的雜訊。
時脈產生器方塊的部份
,目的是產生
switching所需的方波
,此方塊除了含有一弛緩振
盪器
,也包含了一些邏輯閘之組合以產生四個相位之波形
(P1、
Pd1、
P2、
Pd2)。
而偏壓
電路方塊的目的是提供
OTA及
Opamp的偏壓。
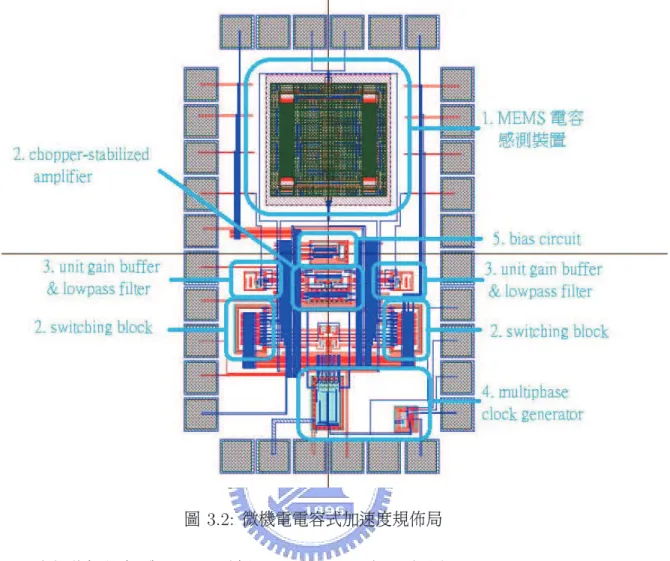
圖
3.2所示為整個微機電電容式加速度規的電路佈局
,上方為
MEMS-Senser,中
間的部份是偏壓電路、
Chopper-Stabilized放大器、 輸出緩衝器及低頻濾波器
,接著的
是
switching的方塊
,以及時脈產生器方塊。 整個電路佈局盡量做到左右對稱
,而將容
易造成雜訊的部份做在下方
,弛緩震盪器更是做在最角落
,盡量避免造成雜訊的干擾。
而各區塊都有做隔絕圈
(guard ring),且有各自的
VDD和
GND(共四組
)。
3.2
弛緩震盪器電路及分析
3.2.1
電路概念
此震盪器如圖
3.3所示
[3],使用一個史密特觸發器
,與一組傳輸閘
(transmission gate) ( Mn與
Mp )配合
,此組傳輸閘導通時
,ㄧ者工作在飽和區
(saturation region),另一
者為
off。
史密特觸發器的部份
,以ㄧ個比較器、 兩個電阻以及額外的參考電壓
0.5VDD所組
成
,設計比較器使其輸出為
VDD或是
GND,而配合兩個等大的電阻
R,使得比較器正
端的電壓為
0.75VDD(= 2.475V )或是
0.25VDD(= 0.825V ) ,亦即為史密特觸發器的
輸入準位
,我們得到史密特觸發器的轉移曲線如下圖
:若欲改變觸發準位
,可透過改變兩個電阻的比值做調整。
傳輸閘的部份
,我們將外加電壓
VCT L1以及
VCT L2設定如下
Vtn < VCT L1< 0.25VDD + Vtn (3.1) 0.75VDD− |Vtp| < VCT L2 < VDD − |Vtp| (3.2)圖
3.2:微機電電容式加速度規佈局
由於此組設定
,舉
( 3.1 )為例
, Vtn < VCT L1則
Mn導通
,而
VCT L1< 0.25VDD+ Vtn迫使
Mn之工作區為飽和區
,同樣
( 3.2 )亦使
Mp導通時工作於飽和區
,此組設
定
,使電容
CT能較快速的充放電。
我們以圖
3.5與圖
3.6來說明振盪器的工作方式。
圖
3.5所示為當比較器負端的電壓小於正端時
, CP端的電壓為
VDD ,致使正端
電壓為
0.75VDD ,於是
Mp導通
( Mn為
off狀態
)並對電容
CT充電
(充至
0.75VDD )。 圖
3.6所示為比較器負端的電壓大於正端時
, CP端的電壓為
GND ,致使正端電壓
為
0.25VDD ,於是
Mn導通
( Mp為
off狀態
) ,使得電容
CT放電
, (放至
0.25VDD ),如此循環而產生時脈。
圖
3.7為此電路模擬之結果
,其
VCT L1 = 1V、
VCT L2= 2V , CT = 0.1pF ,輸出
T C p M DD V CTL1 V R n M CTL2 V DD 0.5V DD V R CP CP CP CP CP CP
圖
3.3:弛緩震盪器電路
DD V Vi DD 0.75V o V DD 0.25V 3.3V 0V圖
3.4:圖
3.3中史密特觸發器的轉移曲線
頻率為
1MHz,斜波部份為比較器負端的波形
,其上下界分別為
0.75VDD和
0.25VDD。
3.2.2
實作之電路
實作時將電路稍作修改
,如圖
3.8所示
,以ㄧ個較為簡單的史密特觸發器取代掉比
較器以及電阻
,也毋須再另外提供
0.5VDD的電壓
,其工作原理相當類似
,說明如下。
T C p M DD V R n M CTL2 V DD 0.5V R CP CP CP CP
圖
3.5:對
CT充電時
Mn及
Mp所組成的
CMOS開關
,可視為
RC充放電中的電阻
,將此組開關獨立
出來測其導通電阻
, Mn的閘極接
VDD , Mp的閘極接地
,開關的一端接地
,另一端從
0V掃至
3.3V ,其導通電阻
,如圖
3.9所示
,約在
0.15M歐姆至
0.2M歐姆之間。
史密特觸發器的觸發準位
,如圖
3.10所示
,為
0.88V以及
2.4V ,故其特性曲線
,如圖
3.11所示。
關於整個電路的動作
,首先
,先假定
CP¯輸出的電壓為
VDD,造成
Mp導通而
Mn為
off狀態
,於是
CP¯的電壓透過
Mp對電容
CT充電
,此時點
SVG上的電壓不足以使
M2導通
, M6亦因閘極為
VDD而關閉
,故
M4及
M5是導通但無電流的狀態
(也因此
¯ CP輸出
VDD的電壓
);隨著點
SVG上的電壓增加
,終於使得
M4關閉
, ¯CP改由導
通的
M1及
M2接地
,使得
M3因閘極接地而關閉
,故
M1及
M2導通但無電流
, ¯CP輸出為
GND;由於
CP¯改為輸出
GND的電壓
,傳輸閘改為
Mn導通而
Mp off,電容
CT開始放電
,ㄧ直放電到
SVG的電壓低到迫使
M2關閉
, ¯CP改由導通的
M4及
M5T C p M DD V CTL1 V R n M DD 0.5V DD V R CP CP CP CP
圖
3.6:對
CT放電時
輸出
VDD為止
,如此週而復始
,形成震盪。
藉由外部電壓
VCT L1和
VCT L2的調整
,可以增快或降低震盪的頻率
,其中
VCT L1決定的是電容
CT透過
Mn放電的速度
, VCT L1越高則放電速度越快
, VCT L2決定的是
電容
CT透過
Mp充電的速度
, VCT L2越低則充電速度越快。 電路設計的目標
,震盪器
的輸出頻率可調範圍至少要是
0.5MHz ∼ 2MHz ,以確保在溫度及製程的變動下
,皆
可經由外部電壓調整出
1MHz的輸出頻率。 表
3.1為
spice的模擬結果
,假定雜散與
PAD負載電容為
2.2PF,可經由外部電壓調整出
0.33MHz ∼ 2.5MHz的輸出頻率。
VCT L1 VCT L2震盪頻率
功率消耗
圖
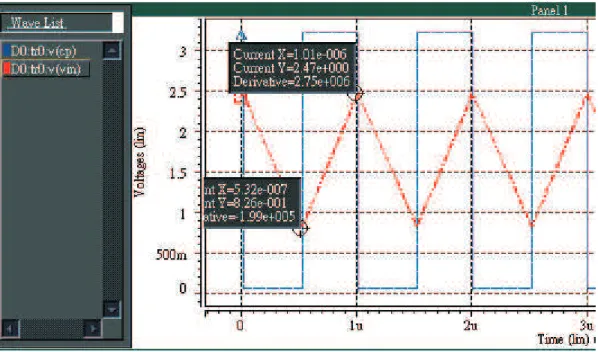
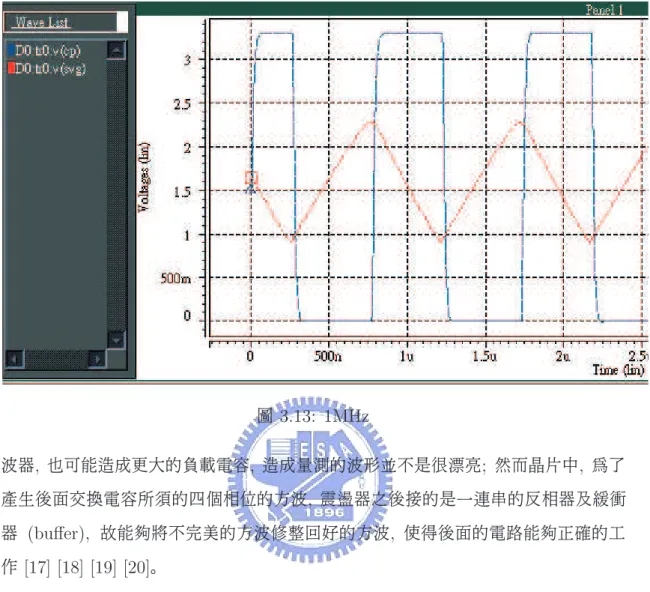
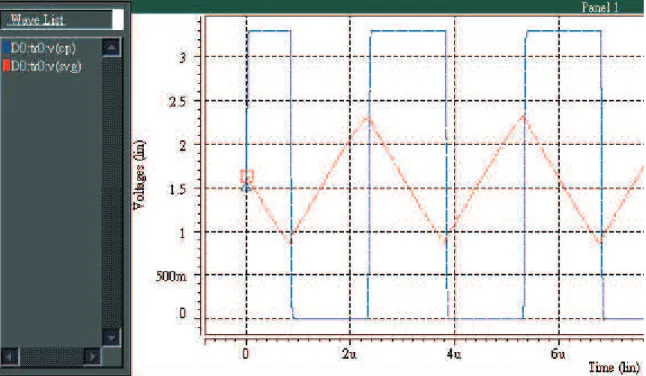
3.12 2.3V 1.2V 2.5MHz 1.5605mW圖
3.13 1.6V 1.8V 1MHz 1.6013mW圖
3.14 1.05V 2.13V 0.33MHz 1.6676mW表
3.1:經外部電壓調整後可得不同之震盪頻率
圖
3.7:圖
3.3的模擬結果
T C p M CTL1 V n M CTL2 V DD V CP CP CP CP CP CP 1 M 6 M 5 M 4 M 3 M 2 M DD V SVG圖
3.8:實作之弛緩震盪器電路
3.3
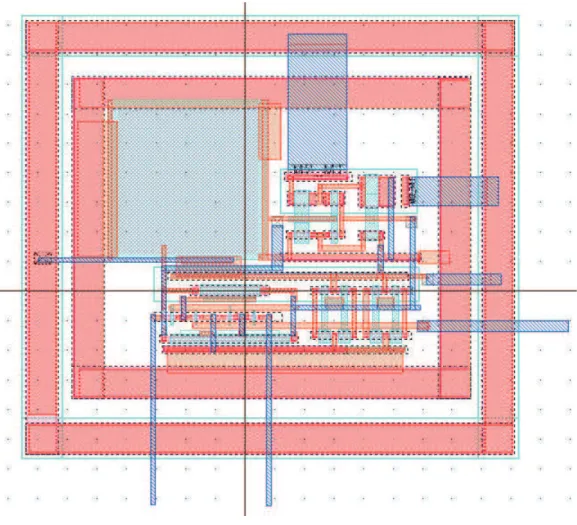
電路佈局
電路佈局的大小為
84 ∗ 75um2,包含了外部的
V DD和
GND的隔絕圈
(guard ring),避免影響到其他電路的操作。
0 0.05 0.1 0.15 0.2 1 5 9 13 17 21 25 29 33 *0.1V M!" #$1
圖
3.9:開關之導通電阻
圖
3.10:輸入斜波以量測史密特觸發器準位
3.4
模擬結果
佈局後抽取出設計值
,及所有的寄生電阻電容所做的模擬
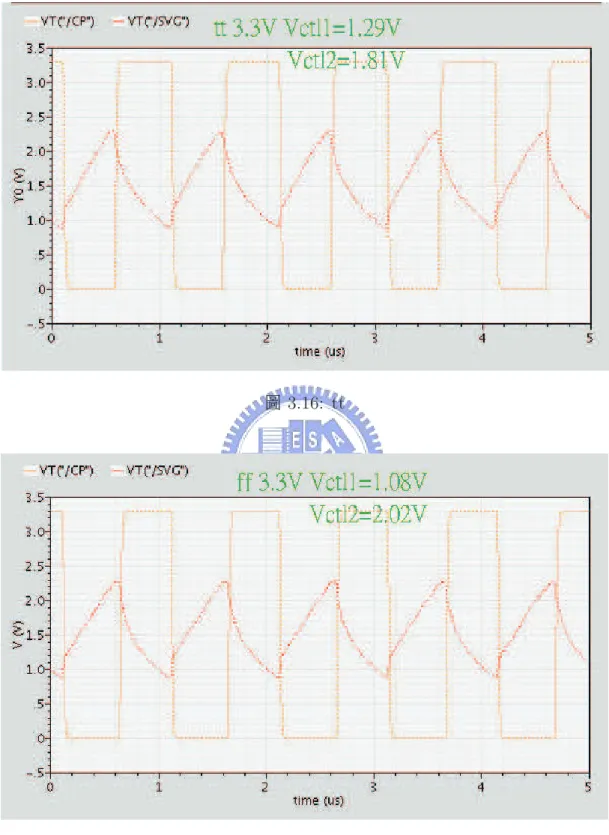
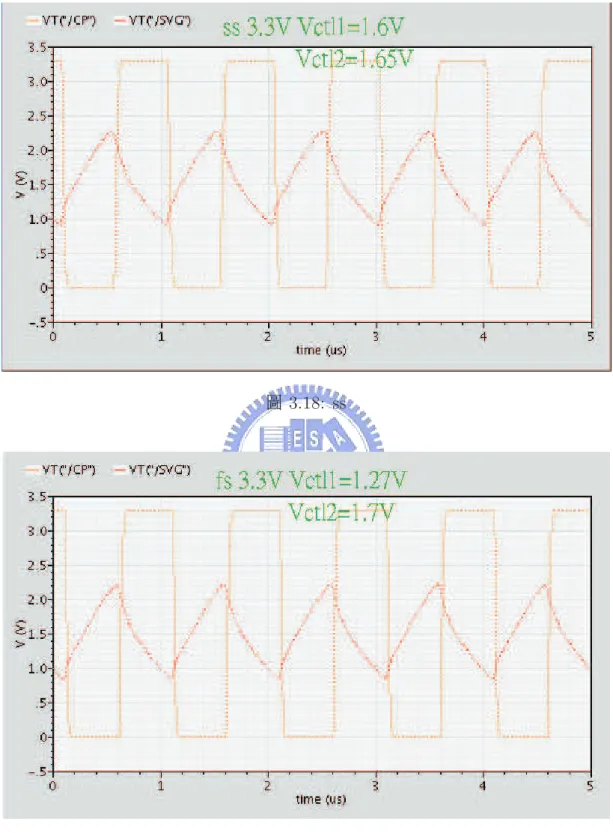
(post simulation)如下
,DD V Vi