國
立
交
通
大
學
資訊科學與工程研究所
碩
士
論
文
考量大眾運輸優先
之可適性都市交通號誌控制系統
An Adaptive Urban Traffic Signal Control System
with Bus Priority
研 究 生:張慈麟
指導教授:簡榮宏 博士
考量大眾運輸優先之可適性都市交通號誌控制系統
An Adaptive Urban Traffic Signal Control System
with Bus Priority
研 究 生:張慈麟
Student:Tzu-Lin Chang
指導教授:簡榮宏
Advisor:Rong-Hong Jan
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
碩 士 論 文
A ThesisSubmitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science July 2012
Hsinchu, Taiwan, Republic of China 中 華 民 國 101 年 7 月
i
考量大眾運輸優先之可適性都市交通號誌控制系統
研究生:張慈麟
指導教授:簡榮宏 博士
國立交通大學資訊科學與工程研究所
摘
要
近年來,隨著經濟快速成長以及都市高度開發,交通壅塞已經成為各都市的 主要問題,因此交通號誌控制一直是智慧型運輸系統(Intelligent Transportation System, ITS )中重要的一部分。巴士可搭載高乘客的特性使其成為非常適合都市 環境的交通工具,因此巴士優先權也成為交通號誌控制系統中重要的一部分。巴 士具有不同於一般車輛的特性:較多的乘客數量、巴士預計到站時間以及前後班 次間隔等。先前有關巴士優先權的研究著重於減少平均等待時間,但他們並沒有 同時考量到以上所提的種種巴士特性以及會對一般車輛所造成的影響。在此篇論 文中,我們提出一可適性即時交通號誌控系統,藉由路邊的感測節點以及巴士上 之車載機等方式收集即時交通資訊,計算出各時相所需的時間以及其所擁有的效 益值和公車優先權,並依此控制交通號誌藉以減少乘客等待時間以及有效調整巴 士的航班。實驗結果顯示我們的方法可以有效減少乘客等待時間以及有效改善巴 士到站時間誤差以及前後班次間隔誤差。ii
An Adaptive Urban Traffic Signal
Control System with Bus Priority
Student:Tzu-Lin Chang Advisor:Dr. Rong-Hong Jan
INSTITUTE OF COMPUTER SCIENCE AND ENGINEERING
NATIONAL CHIAO TUNG UNIVERSITY
Abstract
In recent years, with the economic development and urbanization, traffic congestion
has become a serious problem in urban environments. So, traffic signal control plays a
key role in Intelligent Transportation System (ITS). Particularly, bus system can carry
a higher capacity of passengers, which help to relief traffic jam in cities. Thus, it is
important to consider bus priority during traffic light control. However, different from
ordinary vehicles, bus system has some unique features, including higher capacity of
passengers, fixed routes and specific requirements on bus schedules and headways. In
this thesis, we propose an adaptive traffic signal control system with bus priority. By
collecting traffic information from roadside detectors and buses, we jointly consider
how the above factors change buses priority and the impact to ordinary vehicles.
Simulation results show that our system can significantly reduce total waiting time of
iii
致謝
首先學生要感謝指導多年的指導教授簡榮宏博士,從大學專題研究起,老師 對學生的諄諄教誨,使學生在課業、學術研究上和待人處事方面皆獲益良多,在 此獻上學生最高的謝意。同時,也感謝陳健教授以及易志偉教授花費大量時間對 學生論文提供意見以及指教,使本論文更臻完善,在此深表感激。 計算機網路實驗室的所有成員於我研究生活所提供的幫助,使我在兩年的研 究生涯感到無比充實。感謝學長們(安凱、家瑋)於我論文研究的大力幫助,以及 精闢的建議,在此致上深深的謝意。也感謝同學(唯義、紹閔、曰慈)以及學弟們 (和家、秉琨、瑋劭、景祥)的共同努力,使我能順利完成學業研究以及豐富我的 研究生活。 最後我要感謝我的家人以及眾多在這段時間中支持我走過研究生活的朋友 們,感謝你們一路上的支持與鼓勵,讓我可以堅持到最後並完成人生重要的里程 碑。在此,本文獻要獻給一路關懷勉勵我的家人以及朋友們。iv
Contents
Chapter 1 Introduction ... 1
Chapter 2 Related Work ... 4
2.1 Traffic Signal Control ... 4
2.2 Bus Priority ... 5
Chapter 3 Adaptive Traffic Signal Control System... 8
3.1 System Overview ... 8
3.2 System Flow ... 10
Chapter 4 System Design... 12
4.1 Phase Length Determination ... 12
4.2 Phase Demand Determination ... 14
4.2.1 Passengers’ Waiting Time ... 15
4.2.2 Bus Schedule Delay ... 17
4.2.3 Bus Headway Deviation ... 18
4.2.4 Phase Demand Function ... 20
Chapter 5 Simulation ... 22
5.1 Simulation Environment ... 23
5.2 Simulation Results ... 26
5.3 A Simulation in Real Urban Environment ... 33
v
List of Figures
Figure 1. A typical four-phase cycle at a four-direction intersection ... 5
Figure 2. System architecture ... 9
Figure 3. Intersection model ... 10
Figure 4. System flowchart ... 11
Figure 5. Distance between stop line and the farthest vehicle of phase1 ... 13
Figure 6. Example of calculating time to disperse vehicles. ... 14
Figure 7. The current location and predicted location of the vehicle ... 16
Figure 8. Passengers’ waiting time cumulated in a lane ... 16
Figure 9. The headway between two buses ... 19
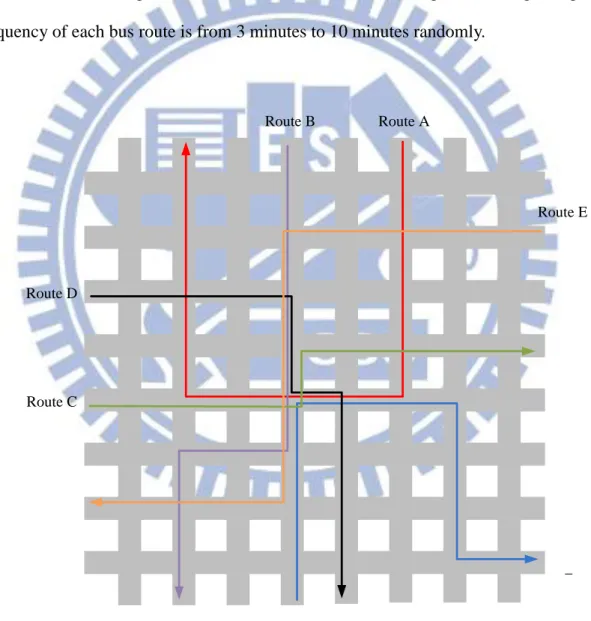
Figure 10. An Example of random network and bus routes ... 24
Figure 11. Total waiting time of buses ... 26
Figure 12. Total waiting time of vehicles ... 28
Figure 13. Total waiting time of passengers ... 29
Figure 14. Bus schedule delay in a bus stop at a pivot intersection... 30
Figure 15. Bus headway deviation ratio in a bus stop at a pivot intersection ... 31
vi
List of Tables
Table 1. Simulation parameters ... 25
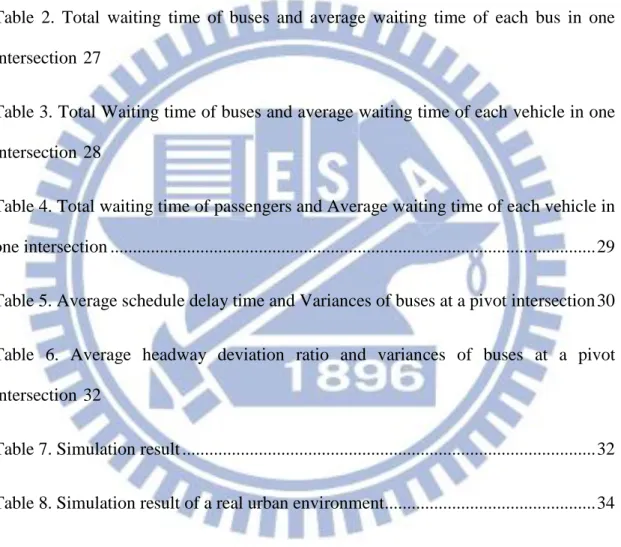
Table 2. Total waiting time of buses and average waiting time of each bus in one
intersection 27
Table 3. Total Waiting time of buses and average waiting time of each vehicle in one
intersection 28
Table 4. Total waiting time of passengers and Average waiting time of each vehicle in
one intersection ... 29
Table 5. Average schedule delay time and Variances of buses at a pivot intersection 30
Table 6. Average headway deviation ratio and variances of buses at a pivot
intersection 32
Table 7. Simulation result ... 32
1
Chapter 1
Introduction
Intelligent Transportation System (ITS) is a system that incorporates advanced
electronics technologies into transportation infrastructure and vehicles, in order to
improve driving safety, transportation time, fuel consumption and services.
Traffic signal control systems [1-2] plays a key role in ITS. It improves the
transportation efficiency by detecting real-time traffic information and choosing suitable
strategies to adapt to different traffic scenarios. With the increasing motorization,
urbanization, population growth and changes in population density, traffic congestion
which increases travel time, air pollution and fuel consumption has become an important
problem of the world today. An improper traffic signal control strategy may cause severe
traffic jam, particular at road intersections.
The development of intelligent design in traffic light control depends on sensing
techniques. In addition to traditional methods like inductive loop detectors and video
vehicle detector [3], there are many advanced sensing techniques have been proposed.
For instances, Wireless Sensor Networks (WSNs) [4] and Vehicular Ad hoc Networks
(VANETs) [5] have been adopted in ITS in recent years which extend the sensing
coverage and require less expensive cost. Furthermore, new techniques provide more
2
In recent decades, with the increasing attentions on environment protection, people
have begun be aware of the importance of reducing air pollution. More and more
passengers are willing to utilize public transport system instead of driving their own cars,
in order to protect the environment as well as to avoid traffic congestion. Bus system is a
major segment in public transport system of urban area. Bus system has several unique
features different with ordinary vehicles. First, buses have higher capacity to carry more
passengers (usually 20 to 35 persons) than ordinary vehicles (1 to 4 persons). It means
that more people can be benefited from a waiting time decrement if we gave each bus a
higher priority. Second, each bus has a fixed schedule which specifies the arriving time
of the bus at each bus stop. People can save time if the bus arrived at bus stops on time.
The third feature is that bus system has a specific requirement on the time interval
between any two successive buses, i.e., the headway, in the same bus route. Keeping a
regular headway would make the bus system more trustable and let people be more
willing to take buses.
A number of methods [18]-[22] have been proposed and adopted to benefit buses.
However, most of them focus only on reducing the bus waiting time and pay little
attention on the features of buses mentioned above. Besides, none of them consider the
impact to ordinary cars, because allocating more passing time to buses could also scarify
the passing time of other vehicles. Moreover, the previous works usually assume a fixed
phase sequence, which however, has little flexibility to deal with the sudden traffic
changing or an approaching bus.
In this thesis, we propose an adaptive traffic signal control system with bus priority,
abbreviated as ATCB. The system is based on a non-fixed phase scheme to deal with the
real-time traffic changing and approaching buses effectively. At each intersection, our
3
schedule delay and headway deviation of buses, to select the most suitable signal.
Simulation results show that ATCB can improve the waiting time of both buses and
ordinary vehicles, keep bus schedules on time and regular bus headways.
The rest of the thesis is organized as follows. In Chapter 2, we review the review
various traffic signal control strategies and related works with bus priority. Then, we
give an system overview and system flow in Chapter 3. The detailed descriptions of
ATCB are presented in Chapter 4. In Chapter 5, we evaluate the proposed system by
simulation and compare it with other methods. Finally, conclusion and future works are
4
Chapter 2
Related Work
In this chapter, we review the previous studies and related works .In section 2.1, we
introduce the existing traffic signal control systems. In section 2.2, we introduce some
articles about bus priority.
2.1 Traffic Signal Control
There are a lot of traffic signal control systems have been implement worldwide, such
as SCOOT [1] and SCATS [2]. These systems control the movement of vehicles by
allocating time to the split of each phase in a cycle. Phase means a combination of green
and red signals that vehicles in some specific directions can pass through the intersection
at. In general, because the right-turning movement doesn’t have conflict with other
movement, it is included in straight-going movement. Split refers to the length of a
phase in a cycle.
These traffic signal control method can be classify to two categories length of the
defined plan. The systems of the first one [1], [2], [6]-[8]which make little changes on a
predefined signal or choose a signal plan among a pre-specified set. The second category
[9]-[15] decides to switch or not the traffic lights at each step. The first one usually
focuses on long-term performance, but it can’t respond well to dynamic changing like
the second one.
5
is fixed [9] or non-fixed [10]. Obviously, the fixed phase sequence scheme is more
acceptable for drivers, because it is similar to the traditional methods we are familiar
with.
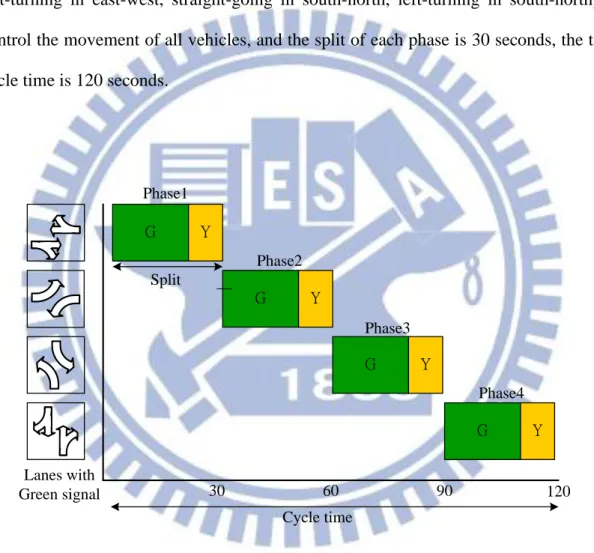
A typical four-phase cycle at a four-direction intersection is shown in Figure 1, there
are four phases: Phase1, Phase2, Phase3 and Phase4(straight-going in east-west,
left-turning in east-west, straight-going in south-north, left-turning in south-north) to
control the movement of all vehicles, and the split of each phase is 30 seconds, the total
cycle time is 120 seconds.
G Y G Y G Y G Y 120 90 60 30 Cycle time Split Phase1 Phase2 Phase3 Phase4 Lanes with Green signal
Figure 1. A typical four-phase cycle at a four-direction intersection
2.2 Bus Priority
In[18], it first summarizes how bus priority at traffic signals works within iBUS(an
6
the bus send its GPS location information to the signal, so that the signal can predict the
arriving time of the bus and decide whether to extend current phase for the bus. This
paper then explores the effects of GPS locational errors on bus priority benefits, and we
can know the impotence of accurately predicting.
In [19],this work also decides whether to extend the current phase after receiving the
request of the incoming bus. But it has considered the situation of buses to design a
headway-based strategy or a schedule-based strategy. So if two or more buses request
the signal different phases, the signal will meet the request with the highest priority (this
not considered in [18]).
Unlike [18] and [19], some works[20] adopts a fixed cycle-time plan, it allocates time
to split of each phase at the start of the cycle, and it will change its plan after receive
request of bus. This method can meet multiple requirements by modifying its original
plan, it can not only extend the phase, but also can make the required phase occur more
early. If there are two or more requests from different buses conflict, it uses a
headway-schedule bus priority to decide what changing should be taken.
In [21], it changes the signal not only based on information of buses but also
information of roads and ordinary vehicles. It considers several elements: First, the
remaining time until the traveling bus in the current green signal phase arrives at the
stop line. Second, the waiting time duration that buses in the next green signal phase
stay on red signal. Third, the ratio of the effective green signal time duration to the green
signal time duration, where effective green signal time duration means the duration
between vehicles arriving the stop line and pass through the stop line. Fourth, the
number of vehicles in the link between the intersection and the adjacent downstream
intersection, if the high number refers the downstream intersection will be possible to
7
extend the current phase.
Some researches focuses on reducing passengers’ waiting time for buses arriving at bus stops instead of passengers’ waiting time for signals on buses. [22] shows that greater regularity benefits could be achieved through a strategy where priority for a bus
is based not only on its own headway but also the headway of the bus behind.
However, these works about bus priority have some drawbacks. First, they mostly
focus on reducing bus waiting time and can’t concern about features of buses in the same time. Second, they may not consider the impact to ordinary vehicles by control
signals for buses. Third, these works usually control signal with a fixed phase sequence
which have little flexibility to change to the phase has highest priority due to the more
vehicles or delay buses.
8
Chapter 3
Adaptive Traffic Signal Control
System
In this chapter, we introduce out adaptive traffic signal control system .In section 3.1,
we propose our system architecture. In section 3.2 we introduce assumptions of the
system.
3.1 System Overview
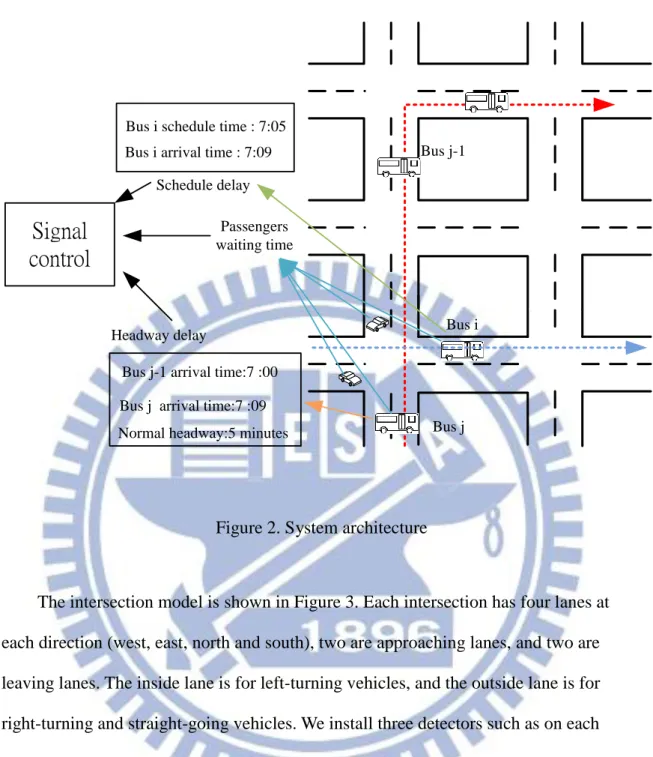
As shown in figure 2, intersections collect information includes the location and
speed of vehicles, headway deviation and schedule delay of buses at the intersection. In
order to deal with the real-time changing of traffic flow, we adopted a non-fixed phase
sequence [10] at each intersection. For each intersection, when the current phase is over,
we will use the information mentioned above to calculate the passenger waiting time per
unit of time in the phase, bus schedule delay ratio and bus headway deviation ratio of
each phase. And we use a phase demand function to calculate the phase demand value of
each phase, and then we will choose the phase with the highest phase demand value and
allocate enough time to the phase. When the remaining time of the phase is over, we do
9 Headway delay
Bus i arrival time : 7:09 Bus i schedule time : 7:05
Schedule delay
Bus j-1 arrival time:7 :00
Bus i
Bus j Bus j-1
Bus j arrival time:7 :09 Normal headway:5 minutes
Passengers waiting time
Signal
control
Figure 2. System architecture
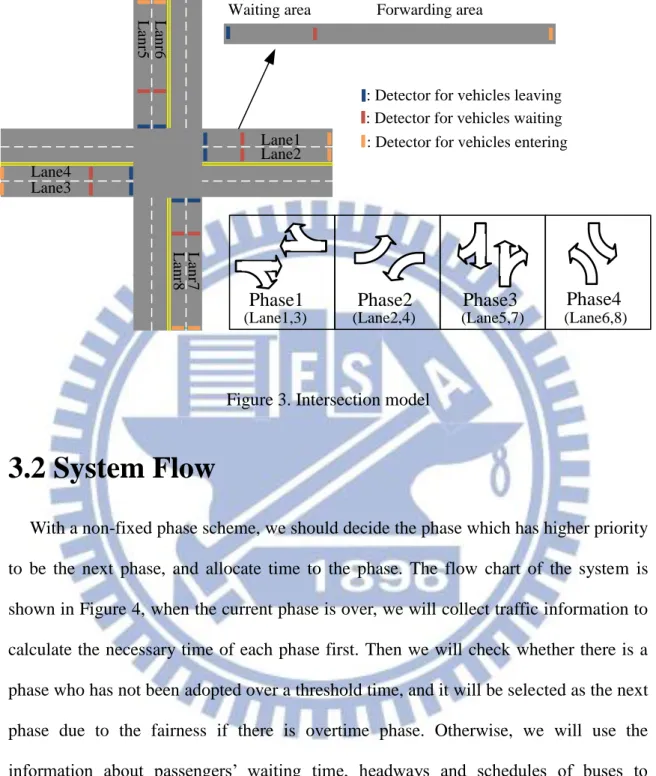
The intersection model is shown in Figure 3. Each intersection has four lanes at
each direction (west, east, north and south), two are approaching lanes, and two are
leaving lanes. The inside lane is for left-turning vehicles, and the outside lane is for
right-turning and straight-going vehicles. We install three detectors such as on each
approaching lane, and they are placing in the start, middle and end of roads to detect
number and speed of waiting vehicles, leaving vehicles and approaching vehicles. And
we divide one lane into two areas: waiting area and forwarding area. We use the vehicles
in the waiting area to determine phase length. Then we calculate passenger waiting time
will be caused by vehicles has been in the waiting area and vehicles in forwarding area
will arrive at waiting area then wait for the red signal. Then we calculate the bus
headway deviation ration and bus headway ration of buses in the waiting area. Finally,
10
: Detector for vehicles leaving : Detector for vehicles waiting : Detector for vehicles entering Waiting area Forwarding area
Phase1 Phase2 Phase3 Phase4
Lane1 Lane2 Lane4 Lane3 L an r5 L an r6 L an r7 L an r8
(Lane1,3) (Lane2,4) (Lane5,7) (Lane6,8)
Figure 3. Intersection model
3.2 System Flow
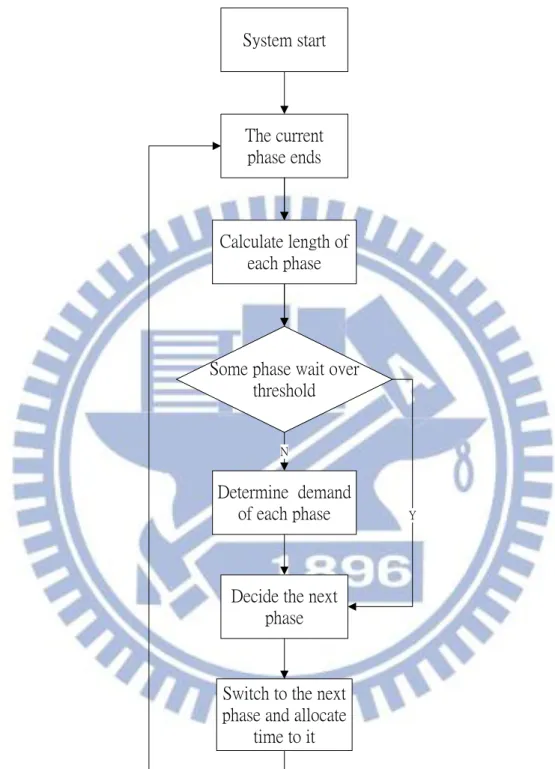
With a non-fixed phase scheme, we should decide the phase which has higher priority
to be the next phase, and allocate time to the phase. The flow chart of the system is
shown in Figure 4, when the current phase is over, we will collect traffic information to
calculate the necessary time of each phase first. Then we will check whether there is a
phase who has not been adopted over a threshold time, and it will be selected as the next
phase due to the fairness if there is overtime phase. Otherwise, we will use the
information about passengers’ waiting time, headways and schedules of buses to determine the demand of each phase. After we have the demand value of phases, we
select the phase has highest priority to be the next switch. Finally, we control the signal
11
The current phase ends
Some phase wait over threshold Calculate length of each phase Determine demand of each phase N
Decide the next phase
Y
Switch to the next phase and allocate
time to it System start
12
Chapter 4
System Design
We adopt non-fixed phase sequence to deal with the real-time changing of traffic
flow and requests of buses, so we have to determine how long each phase should be and
which phase should be selected to be next phase. The first one we can use collected data
includes location and speed of vehicles to calculate necessary time of each phase, and
introduced it more detail in section 4.1.The second one, we have to concern about
ordinary vehicles and buses, then we select three factors to design a phase demand
function. After we get the allocated time of each phase, we can calculate the first factor:
total passengers waiting time in each unit of time. Then we consider about bus regularity,
we calculate the bus schedule delay ratio and bus headway ratio to be the second and
third factor. After we calculate the phase demand value of each phase, the phase with
highest green demand value will be selected as next phase. Section 4.2 introduces the
details of phase demand determination.
4.1 Phase Length Determination
Before determining the length of each phase, we should know number of vehicles in
13
intersection only two lanes in a phase. First, we calculate the time of dispersing all
vehicles in two lanes of a phase, and we define dist( fi, ) as the distance between the
stop line and the farthest vehicle in the waiting area in the two lanes of phase f at
intersection i. An example of Phase1 is shown as see Figure 5.
Waiting area Forwarding area
…
)
,
( f
i
dist
……
Lane1 Lane3Figure 5. Distance between stop line and the farthest vehicle of phase1
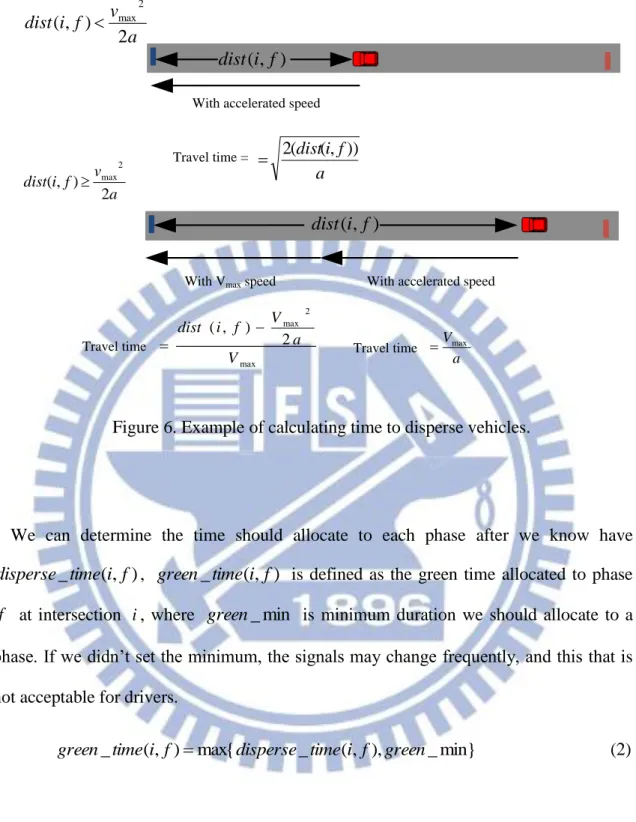
After gettingdist( fi, ), we could calculate how long can disperse the all vehicles in the waiting area of phase f . disperse_time(i,f) is defined as the time needed to
disperse all vehicles of phase f at intersection i,.Where a means the acceleration of
vehicles, and Vmax means the max speed of vehicles.
, 2 ) , ( , )) , ( ( 2 ) , ( _ max 2 max max V a V f i dist a V a f i dist f i time disperse a V f i dist if a V f i dist if 2 ) , ( 2 ) , ( 2 max 2 max (1) When a V f i dist 2 ) , ( 2 max
, it means that the vehicle will arrive at the stop line before it speed up to the Vmax, and
a V f i dist 2 ) , ( 2 max
means the vehicle will speed up to the Vmax
and forwarding a distance at the Vmax speed before it arrive at the stop line ( see Figure
14 a v f i dist 2 ) , ( 2 max a v f i dist 2 ) , ( 2 max ) , ( fi dist ) , ( fi dist
With accelerated speed With Vmax speed
With accelerated speed
a Vmax max 2 max 2 ) , ( V a V f i dist Travel time =
Travel time Travel time
a f i dist(, )) ( 2
Figure 6. Example of calculating time to disperse vehicles.
We can determine the time should allocate to each phase after we know have
) , ( _time i f
disperse , green_time(i,f) is defined as the green time allocated to phase
f at intersection i, where green_min is minimum duration we should allocate to a phase. If we didn’t set the minimum, the signals may change frequently, and this that is not acceptable for drivers.
min} _ ), , ( _ max{ ) , (
_time i f disperse time i f green
green (2)
4.2 Phase Demand Determination
To decide which phase should be selected, we calculate three factors including
15
phase demand function to determine the demand of each phase. And select the phase
with the highest value to be the next phase.
4.2.1 Passengers’ Waiting Time
The first factor is passengers’ waiting time, and it’s also the most evaluated item of traffic signal control systems. We calculate the total passengers’ waiting time of other
phases caused if a phase is adopting. We calculate the passengers’ waiting time of two
types of vehicles, the first type of vehicles is the vehicle in waiting area, the other type
of vehicles is the vehicle in forwarding area and will stop at waiting area for the red
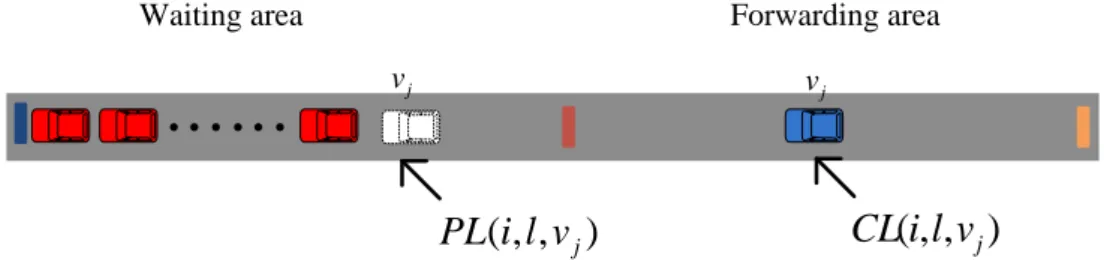
signal. To calculate the waiting of the second type, we defined CL(i,l,vj) as the current location of the jth vehicle on lane l at intersection i, and PL(i,l,vj) as the location of the jth vehicle will be and stop for the red signal on lane l at intersection
i.Then we can calculate the TNA(i,l,vj) as the time needed for jth vehicle arrive at )
, , (i l vj
PL and stop for the red signal on lane l at intersection i. The TNA(i,l,vj) of first type of vehicles is zero because CL(i,l,vj) is equal to PL(i,l,vj) of these vehicles, the current location and the predicted location of the vehicle in the forwarding
area is shown as Figure 7. Where V is the current speed of v , and d is the j deceleration of vehicles . j j j j j j j v l i PL v l i CL if V d V v l i PL v l i CL d V v l i PL v l i CL if v l i TNA , , ( ) , , ( , 2 1 ) , , ( ) , , ( ) , , ( ) , , ( , 0 ) , , ( 2 (3)
16
……
Waiting area Forwarding area
)
,
,
(
i
l
v
jCL
)
,
,
(
i
l
v
jPL
j v j vFigure 7. The current location and predicted location of the vehicle
Then we can calculate the waiting time of each vehicle for a time period.
) , , ( _time i f T
wait is defined as the total passengers’ waiting time if phase f sustains
for the red signal for a time period of T time, and the p(vj) means the number of passengers on v . If the j T is less than TNA(i,l,vj), TTNA(i,l,vj) would be negative, and that means the vehicle will not stop at the period of T , so the
) , , ( _time i f T
wait would be zero.
l j j j p v v l i T N A T T f i t i m e w a i t_ (, , ) max{0,( ( , , )) ( )} (4) An example of passengers’ waiting time cumulated by a lane is shown in Figure 8. There are i vehicles in waiting area and one vehicle in the forwarding area.Waiting area Forwarding area
……
1 v v2 vi vi1……
1 v v2 vi vi1……
1 v v2 vi vi1After time, arrive at its location in waiting area
1
i
t
At the end of the red signal
0
t
T
t
0
1 0
t
it
0 _time wati 1 _timeiti wati 1 iv
) ( _timeiT Tti1 wati17
Then we define wait_time(i,f) as the total passengers’ waiting time cumulated if
we allocate green_time(i,f) to phase
f
.
f f f i time green f i time wait f i time wait ' )) , ( _ , ' , ( _ ) , ( _ (5)Each phase may be allocated different length, but they may have the same
) , ( _time i f
wait . Obviously, the phase be allocated shorter time but cause the same
total passengers’ waiting time is not effective relative to the phase has longer length. We defined wait_unit(i,f) as the total passengers’ waiting time in each unit of time if
phase f is be assigned the next phase.
) , ( _ ) , ( _ ) , ( _ f i t i m e g r e e n f i t i m e w a i t f i u n i t w a i t (6) The previous work with non-fixed phase sequence only use the number of vehicles to
decide which phase will be assigned as the next phase and time .But they don’t concern
the waiting time cumulated by other vehicles at the period of allocated time and
passengers on each vehicle. In our traffic signal control system, we have concerned these
elements in equation (6).
In general, the phase with lower wait_unit(i,f) value will cause lower passengers’ waiting time, and the phase with higher wait_unit(i,f) will cumulate more passengers’ waiting time. If we don’t concern features of buses, we should select the phase with lower wait_unit(i,f) as the next phase, and it should have better
performance compare to the previous work.
4.2.2 Bus Schedule Delay
18
time at bus stops. The schedule of a bus route is always designed based on an ideal
experience of the bus. But because the traffic flow changes at any time, buses always
will be influenced and can’t arrive at each bus stop on the scheduled time, they may
arrive at bus stops late or early compare to its scheduled time. The buses are late from its
bus schedule should be benefited at intersections by control the traffic signal, and the
buses is early than its schedule should have lower priority at each intersection to adjust it
to close to its bus schedule.
To calculate the schedule delay, we first define schedule_arrive(i,j) as the time bus j should be in phase f at intersection i, and actual_arrive(i, j)as the actual arrival
time of bus j in phase f at intersection i. Then we can calculate schedule delay of each
bus. schedule_delay(i,f) is defined as the highest schedule delay of buses in phase f
at intersection j. There may be more than one bus in the same phase at the intersection,
and they may be late or early from its schedule, but the bus with highest schedule delay
should be benefited first of all. So we select the highest schedule delay of buses in each
phase to be theschedule_delay(i,f) of phase f .
)} , , ( _ ) , , ( _ max{ ) , (
_delay i f actual arrivei f j schedule arrivei f j
schedule (7)
4.2.3 Bus Headway Deviation
In normal situation, each bus can carry the close number of passengers and people
will not wait a bus than the headway. Although each bus departures from the first bus
stop in a fixed time interval, they may be delay or early than their predefined headway,
and it will cause people waste much time at bus stops and make some buses carry many
19
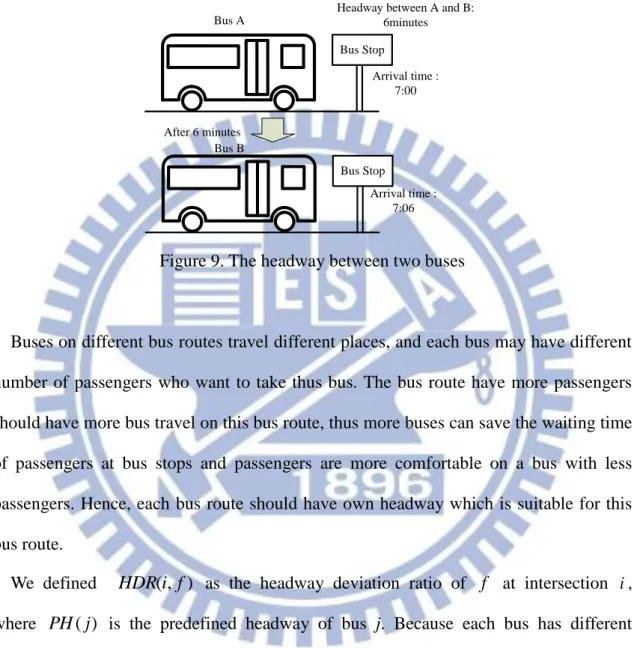
The headway between two buses is using the difference of the arrival time of the
current bus and its preceding bus. An example is shown in Figure 9. The difference of
arrival time of BusA and BusB is six minutes, and the headway is also six minutes.
Bus Stop Bus Stop Bus A Bus B After 6 minutes Arrival time : 7:00 Arrival time : 7:06
Headway between A and B: 6minutes
Figure 9. The headway between two buses
Buses on different bus routes travel different places, and each bus may have different
number of passengers who want to take thus bus. The bus route have more passengers
should have more bus travel on this bus route, thus more buses can save the waiting time
of passengers at bus stops and passengers are more comfortable on a bus with less
passengers. Hence, each bus route should have own headway which is suitable for this
bus route.
We defined HDR( fi, ) as the headway deviation ratio of f at intersection i,
where PH( j) is the predefined headway of bus j. Because each bus has different
predefined schedule, we have to use a ratio to compare headway deviation of a bus with
the other one. There may be more than one bus in the same phase at the intersection, and
the bus with highest headway deviation ratio should be benefited than buses have lower
headway deviation ratio. So we select the highest schedule delay of buses in each phase
to be HDR( fi, ) of phase f . } ) ( ) ( ) , , ( m a x { ) , ( j PH j PH f j i headway f i HDR (8)
20
4.2.4 Phase Demand Function
Now, we define the phase demand function according to the above mentioned
measurements. In order to validate the impact from each measurement, we normalize
their domain values from zero to one. More specifically, let wait_ priority_max,
max _ _ priority
schedule and headway_ priority_max denote the maximal values
measured during the simulation, respectively. We will record the total data including
) , (
_unit i f
wait , schedule_delay(i,f) andHDR( fi, ). We set wait_ priority_max
as the two times of average value of all wait_unit(i,f) , and we set
max _ _ priority
schedule and headway_ priority_max the same way.
Then we define wait_priority(i,f) , schedule_priority(i,f) and
) , ( _priority i f headway . _ _m a x ) , ( _ ) , ( _ p r i o r i t y w a i t f i u n i t w a i t f i p r i o r i t y w a i t , (9) _ _max ) , ( _ ) , ( _ priority schedule f i delay schedule f i priority schedule (10) _ _m a x ) , ( ) , ( _ p r i o r i t y h e a d w a y f i HDR f i priority headway . (11)9
Besides, we give three scaling factors
1,
2and
3 denote as the weight ofpassenger waiting time, bus schedule delay ratio and bus headway deviation ratio. The
21 ) , ( _ ) , ( _ ) , ( _ ) ( ) , ( _ 3 2 1 f i priority headway f i priority schedule f i priority wait f i demand phase (12)
At each intersection, if there is an overtime phase, the overtime phase will be selected.
22
Chapter 5
Simulation
In this section, we evaluate the performance of ATCB by using NetLogo simulator
[23] (version 4.1.3). We compare ATCB with the traditional predefined fixed-time
scheme with bus priority strategy like TDTSP [19] and an adaptive fuzzy logic control
(AFLC) [21].Beside bus priority, we also compare ATCB with an actuated traffic control
and a non-fixed sequence control scheme [10]. The details of each scheme are described
below.
We modify the TDTSP: We use a fixed sequence traffic signal control scheme and
we benefit bus by extending the current phase if there is a bus can pass through the
intersection by the current phase. If there are two buses on different routes meet in an
intersection, we compare the headway deviation and schedule delay to decide which bus
will be benefits.
Then, we modify AFLC: Like TDTSP, we also adopt a fixed sequence traffic signal
control scheme and decide whether to extend the current phase or switch to next phase.
In our modification, we compare ordinary vehicles and buses of the current phase with
ordinary vehicles and buses of the next phase to decide whether to extend the current
phase or switch to the next phase.
Actuated traffic control method controls signals by detecting the coming vehicles.
23
vehicles will cross the intersection in a short period, it will extend the current phase until
reach its maximum green time.
In a non-fixed sequence scheme, when the current phase is going to end, it will find
the most suitable phase from all phases, the original scheme consider many factors, in
our modification, we only focus on the number of vehicles, the phase has the biggest
number of vehicles will be selected as the next phase.
We analyze the simulation results of total waiting time of vehicles, total waiting
time of buses, total passengers’ waiting time, average bus schedule deviation and average bus headway deviation.
5.1 Simulation Environment
As shown in Figure 10, we perform the simulation on a network of 8×8 traditional four-direction intersections, and the length of roads is 500 meters. The length of the
waiting area on each road is 200 meters, and each road has four lanes, two are
approaching lanes, and two are leaving lanes. We generate the ordinary vehicles on the
edge roads of the network in a rate of 10 vehicles/minutes. Each vehicle are created with
a speed of 14m/s. The acceleration of vehicles is assigned as 2m/s2, it means that each vehicle will reach its limit speed in 7 second. The deceleration of vehicles is 4m/ s2. Each vehicle will keep a safe distance when it is driven. And we adopt each vehicle
carry average two passengers. In this network, we set five bus routes (RouteA, RouteB,
RouteC, RouteD and RouteE), each bus on different bus routes enter this map with
different frequencies (predefined headway). And we let them meet at an intersection to
generate a pivot intersection, the bus routes is shown in Figures 10. And passengers on
24
detail parameter of simulation is shown in TABLE 1.
We generate these five routes randomly. First, we randomly select a pivot
intersection, and the distance between the pivot intersection and edges of this map is at
least two intersections. For each route, we give an entry and an exit randomly, and the
entry can’t be also the exit. The buses of the route will pass through the pivot
intersection, if the route is illegal or the length of this route is less than eight
intersections, we will generate a new route until the route is legal and enough long. The
frequency of each bus route is from 3 minutes to 10 minutes randomly.
Route A Route B Route C Route D Route C Route E
25
Table 1. Simulation parameters
Map size 8*8 grid
Length of roads 500 m
Length of waiting area 200 m
Traffic flow the edge road 10 vehicles/min
Speed limit 14 m/s (50 km/h) Acceleration 2 m/s2 deceleration 4 m/s2 Passengers of a ordinary vehicle 2 Passengers of a bus 10~20 Run time 2h
Route A predefined headway 3~10 min
Route B predefined headway 3~10 min
Route C predefined headway 3~10 min
Route D predefined headway 3~10 min
26
5.2 Simulation Results
In the preliminary experiment, we fine the appropriate value of each weight (1:0.5,
2
:0.5, 3:0.75) to reduce the headway deviation and schedule delay of buses and
don’t produce huge impact on the passengers’ waiting time. And we use these value in the below simulation.
We first evaluate the waiting time of buses in ATCB and other control strategies,
which is the sum of waiting time at intersection of all buses. Figure 11 is the result of
total waiting of all buses, and it shows that our scheme ATCB has the best performance
at reducing bus waiting time, and it is better than other methods at least 40 percent. Both
TDTSP and ADT consider bus priority which extends its current phase, the former one
considers headway deviation, and the later one considers both the ordinary vehicles and
buses. They have better performance than the actuated scheme which doesn’t consider
bus priority. The non-fixed phase scheme doesn’t consider bus priority, but the non-fixed
scheme is better than actual due to it is better for all vehicles include buses and ordinary
vehicles.
Figure 11. Total waiting time of buses
0 20 40 60 80 100 120 0 1 2 3 4 5 6 7 8 9 10x 10 4 Time (min) T o ta l w a it in g t im e ( s e c ) ATCBTDTSP Actuated AFLC Non-fixed
27
Table 2. Total waiting time of buses and average waiting time of each bus in one intersection
Scheme Total waiting time in
two hours
Average waiting time of each
bus in one intersection
ATCB 3.79 × 104 sec 12.31 sec
TDTSP 7.04 × 104 sec 22.57 sec
Actuated 8.79 × 104 sec 28.04 sec
AFLC 6.71 × 104 sec 21.72 sec
Non-fixed 6.38 × 104 sec 20.66 sec
We could see that the best performance is non-fixed scheme, since that the non-fixed
scheme don’t concern bus priority. And our ATCB concern bus priority from bus schedule delay, headway deviation, number of passengers so our total waiting time of all
vehicles is more than the non-fixed scheme. But the difference is just 3.8 percent, and it
is acceptable because we can save 40 percent waiting time of buses as shown in Figure
11. And TDTSP has the poor performance due to that it doesn’t concern the real-time
information except bus information. Actuated scheme extends the current phase to
permit vehicles pass through intersections is more better than TDTSP due to that it can
avoid vehicles wasting a lot of time waiting for signals just because it misses few
28
Figure 12. Total waiting time of vehicles
Table 3. Total Waiting time of buses and average waiting time of each vehicle in one intersection
Scheme Total waiting time in
two hours
Average waiting time of each
vehicle in one intersection
ATCB 1.47 × 107 sec 25.95 sec
TDTSP 2.23 × 107 sec 38.11 sec
Actuated 1.55 × 107 sec 26.78 sec
AFLC 1.61 × 107 sec 27.26 sec
Non-fixed 1.42 × 107 sec 24.67 sec
The passenger’s total waiting time is shown in Figure 13. And we could find that the result shown in Figure 13 is similar to Figure 12, but the performance of our ATCB is
better than the non-fixed phase scheme, because we consider the number of passenger of
each vehicle in our equation (5). If we don’t consider number of passengers of each vehicles like non-fixed phase scheme, the bus will be treated as ordinary vehicle without
0 20 40 60 80 100 120 0 0.5 1 1.5 2 2.5x 10 7
Time (min)
T
o
ta
l
w
a
it
in
g
t
im
e
(
s
e
c
)
ATCBTDTSP Actuated AFLC Non-fixed29
bus priority. And we could see it has better performance of ordinary vehicles as shown in
Figure 12, but it has poor performance in the result of passengers’ waiting time.
Figure 13. Total waiting time of passengers
Table 4. Total waiting time of passengers and Average waiting time of each vehicle in one intersection
Scheme Total waiting time in two hours
Average waiting time of each passenger in one intersection
ATCB 1.50 × 107 sec 24.32 sec
TDTSP 2.28 × 107 sec 36.96 sec
Actuated 1.61 × 107 sec 26.10 sec
AFLC 1.66 × 107 sec 26.91 sec
Non-fixed 1.46 × 107 sec 23.67 sec
Then we evaluate the schedule delay of buses. We need buses travel a distance to
produce bus schedule delay, so we collect the information from pivot intersection, and
this intersection is a congested intersection because it is passed through by buses of all
bus routes. As shown in Figure 14 and Table 5, we record 30 records of the schedule
0 20 40 60 80 100 120 0 0.5 1 1.5 2 2.5x 10 7
Time (min)
T
o
ta
l
w
a
it
in
g
t
im
e
(
s
e
c
)
ATCBTDTSP Actuated AFLC Non-fixed30
delay of buses on RouteA when it arrives at this intersection. We could find that our
ATCB has a lowest average schedule delay, which is better at least 25 percent than other
schemes. The variance of bus schedule delay of ATCB is 337.79, and it is better than
other schemes at least 63.7 percent.
Figure 14. Bus schedule delay in a bus stop at a pivot intersection
Table 5. Average schedule delay time and Variances of buses at a pivot intersection
Scheme Average schedule delay time Variances of bus schedule delay
ATCB 30.87 sec 337.79 sec
TDTSP 46.88 sec 930.52 sec
Actuated 47.77 sec 1360.84 sec
AFLC 57.22 sec 1971.85 sec
Non-fixed 55.80 sec 985.0 sec
5 10 15 20 25 30 0 20 40 60 80 100 120 140 160 180 Bus (veh) B u s d e la y ( s e c ) ATCB TDTSP Actuated AFLC Non-fixed
31
As shown in Figure 15 and Table 5, we evaluate headway deviation of buses. We still
collect records of bus headway deviation ratio at the pivot intersection. As shown in
Figure 14 and Table 5, in ATCB, the average bus headway deviation ratio is 22.19
percent, and the range of bus headway deviation ratio is from -44 percent to 39 percent
and variance is 601.54 percent. The second best performance is TDTSP, and its average
bus headway deviation ratio is 22.19 percent, and the range of bus headway deviation
ratio is from -68 percent to 70 percent and variance is 601.54 percent.
We also evaluate the total schedule delay time and bus headway deviation ratio which
is shown in Table 7, and the result is similar to the result shown in Table5 and Table6.
Our ATCB still have the best performance.
Figure 15. Bus headway deviation ratio in a bus stop at a pivot intersection
5 10 15 20 25 30 -80 -60 -40 -20 0 20 40 60 80 100 120 Bus (veh) B u s d e v ia ti o n r a ti o ( % ) ATCB TDTSP Actuated AFLC Non-fixed
32
Table 6. Average headway deviation ratio and variances of buses at a pivot
intersection
Scheme Average headway
deviation ratio
Variances of bus headway
deviation ratio ATCB 19.19 % 601.54 TDTSP 35.16 % 1105.39 Actuated 49.39 % 2215.51 AFLC 54.35 % 2603.06 Non-fixed 37.54 % 1681
Table 7. Simulation result
Scheme Total waiting time of buses Total waiting time of vehicles Total waiting time of passengers Average schedule delay Average headway deviation ratio ATCB 3.79 × 104 sec 1.47 × 107 sec 1.50 × 107 sec 38.27 sec 29.21 % TDTSP 7.04 × 104 sec 2.23 × 107 sec 2.28 × 107 sec 46.32 sec 35.01 % Actuated 8.79 × 104 sec 1.55 × 107 sec 1.61 × 107 sec 55.21 sec 43.12 % AFLC 6.71 × 104 sec 1.61 × 107 sec 1.66 × 107 sec 53.92 sec 42.22 % Non-fixed 6.38 × 104 sec 1.42 × 107 sec 1.46 × 107 sec 54.25 sec 38.56 %
33
5.3 A Simulation in Real Urban Environment
To prove ATCB is still effective in real world, we have designed a road network of Taipei City in Taiwan, a rough map is shown in Figure 16. This network has 16
intersections. And we have select 5 real bus routes to simulate.
The result is shown in Table 8, and we can find that the result is similar to the performance in Table 7, that can prove our method ATCB is still effective in a real road network. But because the size of this map is small, so the benefits of reducing waiting of buses are more obvious than the benefits of buses headway and bus schedule than the result of the bigger map.
Shimin Blvd Zhongxiao East Rd Renai Rd Xinyi Rd G u an g fu S o u th R d D u n h u a S o u th R d F u x in g S o u th R d Ji an g u o S o u th R d
34
Table 8. Simulation result of a real urban environment
Scheme Total waiting time of buses Total waiting time of vehicles Total waiting time of passengers Average schedule delay Average headway deviation ratio ATCB 3.84 × 103 sec 2.54 × 106 sec 2.57 × 106 sec 19.12 sec 25.31 % TDTSP 1.25 × 104 sec 4.35 × 106 sec 4.44 × 106 sec 22.23 sec 31.60 % Actuated 1.43 × 104 sec 2.78 × 106 sec 2.89 × 106 sec 28.78 sec 39.53 % AFLC 1.33 × 104 sec 2.85 × 106 sec 2.95 × 106 sec 27.15 sec 34.51 % Non-fixed 1.15 × 104 sec 2.45× 106 sec 2.53× 106 sec 24.74 sec 33.49 %
35
Chapter 6
Conclusion
In this paper, the adaptive traffic signal control system (ATCB) has been proposed for
ordinary vehicles and buses in urban environment. We adopt non-fixed phase scheme,
and we use collected traffic information from detectors on roads and buses to determine
the next phase and the phase should be allocated. To determine which phase is suitable
to be adopted, we concern the passengers’ waiting time and bus priority which include
bus headway deviation and bus schedule delay to determine the demand of each phase.
And the phase which cause lowest passengers’ waiting and improve schedule delay and headway deviation will be selected. The simulation results show that ATCB performs
better at reducing passenger’s waiting time at least 40 percent, and improving schedule
delay at least 17.5 percent, and headway deviation of buses at least 6 percent.
For the future works, the prediction model of traffic flow is also an important point in
traffic signal control systems, and we could have better performance by implementing
the prediction model of traffic flow in our system. Furthermore, we will try to use the
36
References
.
[1] D. I. Robertson and R. D. Bretherton, “Optimizing networks of trafficsignals in real
timełthe scoot method,” IEEE Transactions on Vehicular Technology,vol. 40, no. 3, pp. 11–15, 1991.
[2] A. G. Sims and K. W. Dobinson, “The sydney coordinated adaptive traffic (scat)
system philosophy and benefits,” IEEE Transactions on Vehicle Technology, vol.
29, no. 2, pp. 130–137, 1980.
[3] E. Y. Luz and A. Mimbela “A summary of vehicle detection and surveillance
technologies use in intelligent transportation systems.” http://www.nmsu.edu/~traffic/
[4] B. Zhou, J. Cao, X. Zeng, and H. Wu, “Adaptive Traffic Light Control in Wireless
Sensor Network-Based Intelligent Transportation System,” IEEE Conference on
Vehicular Technology, pp1-5 May 2010.
[5] N. Maslekar, M. Boussedjra, J. Mouzna, and H. Labiod,“VANET Based Adaptive
Traffic Signal Control.” IEEE Conference on Vehicular Technology, pp. 1-5, 2011.
[6] I. Arel, C. Liu, T. Urbanik, and A. Kohls, “Reinforcement learning-based
multi-agent system for network traffic signal control,” IET Intelligent Transport
Systems, vol. 4, no. 2, pp. 128–135, 2010.
[7] A. Guerrero-Ibanez, J. Contreras-Castillo, R. Buenrostro, A. B. Marti, and A. R.
37
traffic-light control”, IEEE Intelligent Vehicles Symposium, pp. 694-696, June
2010.
[8] K. Mizuno, Y. Fukui, S. Nishihara, “Urban Traffic Signal Control Based on
Distributed Constraint Satisfaction,” Hawaii International Conference on System
Sciences, pp. 65, 2008.
[9] T. Li, D. Zhao, and J. Yi, “Adaptive Dynamic Programming for Multi-intersections
Traffic Signal Intelligent Control,” IEEE Conference on Intelligent Transportation Systems, pp. 286-291, 2008.
[10] B. Zhou, J. Cao, H. Wu, “Adaptive Traffic Light Control of Multiple Intersections
in WSN-based ITS”, IEEE Conference on Vehicular Technology, pp15-18 May
2011.
[11] T. H. Heung, T. K. Ho, and Y. F. Fung, “Coordinated road-junction traffic control
by dynamic programming,” IEEE Transactions on Intelligent Transportation Systems, vol. 6, no. 3, pp. 341–350, Sep. 2005.
[12] P. B. Mirchandani and F.-Y. Wang, “RHODES to intelligent transportation
systems,” IEEE Intell. Syst., vol. 20, no. 1, pp. 10–15, Jan./Feb. 2005.
[13] T. H. Heung, T. K. Ho, and Y. F. Fung, “Coordinated road-junction traffic control
by dynamic programming,” IEEE Transactions on Intelligent Systems, vol. 6, no. 3, pp. 341–350, Sep. 2005.
[14] Y. W. Kim, T. Kato, S. Okuma, and T. Narikiyo, “Traffic network control based on
hybrid dynamical system modeling and mixed integer nonlinear programming with
convexity analysis,” IEEE Transactions on Systems, Man and Cybernetics, vol. 38, no. 2, pp. 346–357, Mar. 2008.
38
[15] Y. S. Murat and E. Gedizlioglu, “A fuzzy logic multi-phased signal control model
for isolated junctions,” Transportation Research Part C: Emerging Technologies, pp. 19–36, 2005.
[16] D. Srinivasan, M. C. Choy, and R. L. Cheu, “Neural networks for realtime traffic
signal control,” IEEE Transactions on Intelligent Systems., vol. 7, no. 3, pp. 261–272, Sep. 2006.
[17] J. D. Schmocker, S. Ahuja, and M. G. H. Bell, “Multi-objective signal control of
urban junctions—Framework and a London case study,” Transportation Research
Part C: Emerging Technologies, pp. 454–470, 2008.
[18] N. Hounsell, B. Shrestha, J. Head, S. Palmer, and T. Bowen, “The way ahead for
London’s bus priority at traffic signals,” IET Intelligent Transport Systems, vol. 2, no. 3, pp. 193–200, Sep. 2008.
[19] W. Ma, X.Yang, “Design and Evaluatio Priority System Base on Wireless Sensor
Network”, IEEE conference on Intelligent Transportation Systems, pp. 1073-1077,Sep2008.
[20] Bhouri, N.; Haciane, S.; Balbo, F., “A Multi-Agent System to Regulate Urban
Traffic: Private Vehicles and Public Transport”, International IEEE conference on Intelligent Transportation Systems, pp1575-1581,2010.
[21] G. J. Shen and X. J. Kong, “Study on road network traffic coordination control
technique with bus priority,” IEEE Transactions on Systems, Man and Cybernetics, vol. 39, no. 3, pp. 343–351, May 2009.
[22] Hounsell, N.; Shrestha, B., “A New Approach for Co-Operative Bus Priority at
Traffic Signals,” IEEE Transactions on Intelligent Transportation Systems, vol. 13, no. 1, pp. 6–14, Sep. 2005.
39
[23] Wilensky, U. NetLogo (and NetLogo User Manual), Center for Connected
Learning and Computer-Based Modeling, Northwestern University.