I-Shou University Institutional Repository:Item 987654321/18726
72
0
0
全文
(2)
(3) 以三階 Simulink 發電機模型為基礎之 發電機組參數驗證 研究生:王盈翔指導教授:楊俊哲博士. 義守大學電機工程研究所. 中文摘要. 目前台灣的發電系統中,有許多機組因年代久遠其參數已難以得知,或是發 電機組系統升級,導致機組特性與參數發生差異,為了評估電力系統特性以確保 系統運轉的可靠度與安全性,電力系統動態模擬是最常採用且最為實際的方法, 然而模擬結果的準確與否取決於發電機組以及相關設備模型參數的準確性,若使 用不正確的電力系統模型參數必然導致錯誤的決策結果,所以重新驗證勵磁系統 之參數是有其必要性的。本論文利用 Matlab/Simulink 為基礎設計出以 IEEE 模型 火力(IEEEG1)及水力(PIDGOV)架構的發電機組模型,包含三階測試發電機、渦 輪機、勵磁機模型去測試及驗證實際量測參數,並與台灣電力公司現今發電機組 的 PSSE 模擬結果做為比對。希望藉由 Matlab/Simulink 相關模擬技術對台灣發電 機組模型驗證有所幫助。. 關鍵字:三階發電機、渦輪機、Matlab\Simulink. I.
(4) Generator Unit Parameters Validation Based on Third Order Simulink Generator Model. Student: Ying-Hsiang Wang Advisor: Jun-Zhe Yang Department of Electrical Engineering I-Shou University. ABSTRACT Regarding the power system in Taiwan now, many of them are too old to find the record of the parameters. The power systems have been upgraded, resulting in a large difference in its parameters. In order to ensure the security and reliability of the power system, the dynamic simulation is the best way to use. Because the accuracy of simulation is highly depended on the accuracy of model parameters of generators and other associated equipment. It is well known that using incorrect model parameters lead to incorrect simulation, so revalidation of the generator models is crucial. In this thesis, I use Matlab/Simulink to build two excitation systems by imitating IEEE standard model IEEEG1 and PIDGOV, They contain third-order test generators, turbines, exciter model. To verify these two self-built models, I use field measured data of generator tests and verified parameters to do the simulation, and do the comparison with the simulation results of PSSE(Power System Simulator For Engineering) of Taiwan Power Company. Hoping the experience in this thesis will promote generator model validation in Taiwan.. Keywords: third-order test generators, turbines, Matlab\Simulink. II.
(5) 致謝 時間過得相當之快,大學四年時完全沒有想到會繼續讀研究所,畢業後在澎 湖當兵時經歷了很多,是我人生最奇妙的一年也說不定,也是這年讓我決定繼續 攻讀研究所,然而過程並不順利,兩年下來原本就要放棄的情況下心一撇,輾轉 到了老師的門下,所以我非常感謝我的指導教授楊俊哲博士,很感謝老師收我入 門為研究生,感謝楊老師不厭其煩的指導和傾囊相授,更在關懷學生與營造優良 實驗室環境中不遺餘力,使我能全心研究本論文,老師的教學態度和處事認真都 讓我感動萬分與之效仿。同時也要感謝口試委員林堉仁教授與林穎宏教授,在百 忙之中撥空前來擔任我的口試委員,於口試期間給予指正與建議,使得本論文更 臻至完善。 然後感謝實驗室崇訓學長、亞鴻一同研究並建立快樂且優質的實驗環境;再 感謝大學四年的同窗好友們一路相伴成長,還有研究所同學俊曄在課業上的指導, 更感謝七年間許許多多幫助過我的貴人和教導過我的老師們,能在此開花結果都 是在大家的支持下才能完美落幕,再次感謝各位的照顧。 最後感謝我的家人爸爸、媽媽、姊姊的栽培,有他們全力的奉獻我才能茁壯 於此,其恩德必在日後回報。 此篇論文是在大家的幫忙下才得以完成,所以奉獻給各位老師、長輩、朋友、 同學,並敬祝大家身體健康、順順利利。. 王盈翔. III. 2015.08.
(6) 目錄 中文摘要 ................................................................................................................ I ABSTRACT .......................................................................................................... II 目錄 ...................................................................................................................... IV 圖目錄 .................................................................................................................. VI 表目錄 ................................................................................................................ VIII 第一章 緒論 ......................................................................................................... 1 1.1 研究背景 ................................................................................................... 1 1.2 研究動機與目的 ....................................................................................... 2 1.3 文獻回顧 ................................................................................................... 3 1.4 論文架構 .................................................................................................... 4 第二章 模型分析.................................................................................................. 5 2.1 前言........................................................................................................... 5 2.2 同步發電機 ............................................................................................... 6 2.3 勵磁機 ..................................................................................................... 10 2.3.1 勵磁機類別 .......................................................................................... 12 2.4 自動電壓調節器 ..................................................................................... 15 2.5 渦輪機與調速機 ..................................................................................... 18 第三章 發電機模型 ............................................................................................ 22 3.1 前言......................................................................................................... 22 3.2 火力發電機模型 ..................................................................................... 22 3.2.1 勵磁機與 AVR 模型 ............................................................................ 24 3.2.2 火力渦輪機模型 .................................................................................. 29 IV.
(7) 3.3 水力發電機模型 ..................................................................................... 35 3.3.1 水力渦輪機模型 .................................................................................. 37 3.4 小結......................................................................................................... 41 第四章 試驗測試................................................................................................ 42 4.1 前言......................................................................................................... 42 4.2 火力發電機測試 ..................................................................................... 42 4.2.1 d 軸參數測試(MVar 卸載測試) .......................................................... 42 4.2.2 q 軸參數測試(部分 MW 卸載測試) ................................................... 45 4.2.3 無效功率電流補償(電壓低垂,線路壓補償)測試 ............................ 47 4.2.4 部分負載卸載試驗 .............................................................................. 49 4.3 水力發電機測試 ..................................................................................... 51 4.3.1 d 軸參數測試(MVar 卸載測試) .......................................................... 51 4.3.2 q 軸參數測試(部分 MW 卸載測試) ................................................... 53 4.3.3 無效功率電流補償(電壓低垂,線路壓補償)測試 ............................ 55 4.3.4 部分負載卸載試驗 .............................................................................. 57 第五章 結論與未來展望 .................................................................................... 59 5.1 結論......................................................................................................... 59 5.2 未來展望 ................................................................................................. 60 參考文獻 ............................................................................................................. 61. V.
(8) 圖目錄 圖 2-1 簡易發電機組系統 ........................................................................ 5 圖 2-2 同步機之概要表示圖 .................................................................... 7 圖 2-3 簡易他勵勵磁系統 ...................................................................... 11 圖 2-4 無刷式勵磁系統示意圖 .............................................................. 13 圖 2-5 交流勵磁系統示意圖 .................................................................. 13 圖 2-6 靜態勵磁機示意圖 ...................................................................... 14 圖 2-7 靜態勵磁機示意圖 ...................................................................... 14 圖 2-8 勵磁控制系統示意圖 .................................................................. 15 圖 2-9 發電機容量曲線示意圖 ............................................................. 16 圖 2-10 渦輪葉片轉動示意圖 ................................................................ 18 圖 2-11 渦輪系統示意圖 ........................................................................ 20 圖 3-1 自製 Matlab/Simulink 設計火力發電機組測試架構 .................. 23 圖 3-2 IEEE 標準模型之 EXAC1 .......................................................... 25 圖 3-3 對照 EXAC1 的 SimuLink 自製模型 ......................................... 26 圖 3-4 SimuLink 自製模型 EXAC1 之 SM AVR Type AC1A 展開 ....... 27 圖 3-6 IEEE Type 1 Speed Governing model .......................................... 30 圖 3-7 自製 Matlab/Simulink 設計汽渦輪機模型 .................................. 31 圖 3-8 自製 Matlab/Simulink 設計汽渦輪機 Governor 部分 .................. 32 圖 3-9 自製 Matlab/Simulink 設計汽渦輪機 torque 部分....................... 33 圖 3-10 自製 Matlab/Simulink 設計水力發電機組測試架構 ................ 36 圖 3-11 PSSE 類別 PIDGOV 水輪機與調速機模型 ............................. 38 圖 3-12 自製 Matlab/Simulink 設計水輪機模型 .................................... 39 圖 4-1 台電大林廠某機組汽輪機 d 軸測試之發電機端電壓 ................ 43 圖 4-2 自製 Matlab/SimuLink 汽輪機模型 d 軸測試之發電機端電壓 .. 44 圖 4-3 台電大林廠某機組汽輪機 q 軸測試之發電機端電壓 ................ 45 圖 4-4 自製 Matlab/SimuLink 汽輪機模型 q 軸測試之發電機端電壓 .. 46 圖 4-5 台電大林廠某機組汽輪機無效功率電流補償測試之發電機端電 壓 ..................................................................................................... 47 圖 4-6 自製 Matlab/SimuLink 汽輪機模型無效功率電流補償測試之發電 機端電壓 ......................................................................................... 48 圖 4-7 台電大林廠某機組汽輪機部分負載卸載試驗之發電機轉速..... 49 圖 4-8 自製 Matlab/SimuLink 汽輪機模型部分負載卸載試驗之發電機轉 速 ..................................................................................................... 50 圖 4-9 台電明潭廠水輪機 d 軸參數測試之端電壓................................ 51 圖 4-10 自製 Matlab/SimuLink 水輪機模型 d 軸參數測試之端電壓 .... 52 VI.
(9) 圖 4-11 台電明潭廠水輪機 q 軸參數測試之端電壓.............................. 53 圖 4-12 自製 Matlab/SimuLink 水輪機模型 q 軸參數測試之端電壓 .... 54 圖 4-13 台電明潭廠水輪機無效功率電流補償測試之端電壓 .............. 55 圖 4-14 自製 Matlab/SimuLink 水輪機模型無效功率電流補償測試之端 電壓 ................................................................................................. 56 圖 4-15 台電明潭廠水輪機部分負載卸載試驗之轉速 .......................... 57 圖 4-16 自製 Matlab/SimuLink 水輪機模型部分負載卸載試驗之轉速 58. VII.
(10) 表目錄. 表 2-1 GENROU ....................................................................................... 8 表 2-2 GENSAL........................................................................................ 9 表 3-1 典型值之 EXAC1 ........................................................................ 28 表 3-2 汽輪機及調速機模型參數 .......................................................... 34 表 3-3 水輪機及調速機模型參數 .......................................................... 40 表 4-1 測試項目型態 .............................................................................. 42. VIII.
(11) 第一章 緒論 1.1 研究背景 由於十九世紀末電機工程學的快速進步,加速了電力的普及化,在家庭和工 業當中電力變成了一種不可或缺的存在。而日新月異、突飛猛進的快速發展對工 業和社會產生巨大的變革。進入二十一世紀,現代工業社會的骨幹仍是電力能源。 電力幾乎成為生活上的必需品,更演變成富國的一大指標,我們可以從一個國家 電力工業的發展去判斷其強大與否,擁有快速發展工業及現代化國家對電力的需 求相對更大,所以電力發展最終會成為國家現代化的重要指標,更與民生和經濟 息息相關。 尤其在台灣,以科技業為生存主軸的我們更需要可靠的電力供應來源,電源 的不穩定所發生的斷電事故將對我們產生巨大的損失,例如台灣在經歷過 1999 年 729 及 921 地震大停電,令人悲痛的不光是人命的喪失,對產業經濟更是數億 數兆的巨大虧損,因此如何維持電力品質是一直以來必須研究的重要課題[1]。 在國內目前擁有的發電機組其實還存在著許多問題,譬如發電機組的年代久 遠導致其模型參數多半不可考察,而電力工程的快速發展使得發電機組許多元件 陸續做更新汰換,所以重新驗證發電機組之模型參數就成為研究台灣電力系統主 要課題之一。 在電力系統模擬分析中,其準確性與所建構系統模型的電力參數息息相關, 如何取得正確模型參數(發電機參數、線路參數、負載模型參數等),為系統分析 準確與否的必要條件。現今台灣發的電機組裡,經過驗證的發電機組已達到三十 餘台,而發電機組測試項目主要包含:開路測試、電壓調整器之步階響應測試、 發電機組之 d 軸參數測試與 q 軸參數測試等[2],而本論文主要探討發電機中三 階測試模組、勵磁機模型與渦輪機模型的參數驗證部分。 1.
(12) 1.2 研究動機與目的 在 1996 年美國西岸大停電影響了美國的 8 個州和加拿大東部,雖然大部分 地區經過 30 個小時的斷電後回復正常,經濟分析師認為,所造成的經濟損失數 字很可能以億美元計(美聯社報導)。 而我們臺灣也在歷經 1999 年 729 土石流全台大停電與 921 集集大地震停電 事故後,造成民生經濟巨大損失,股市的下跌,停電導致搶救困難的併發災害等 等,實在令人惋惜[1]。 所以自從災害以來,政府將重點強化在廣域監測系統應用的發展,其中強化 台灣電力品質穩定度等相關問題,皆是當前必須突破的巨大難關。 目前台灣有許多發電機組的系統正陸續在做更新汰換的動作,導致系統參數 和特性已經與原本不相同,參數與機組的更動將會大大的影響系統穩定度,所以 必須重新估測發電機系統模型參數,而下一步便需要建立符合測試時所需要的發 電機系統模型,因此本論文將針對發電機系統模型之驗證為目標。 目前台灣的電力系統模擬絕大多使用 PSSE 軟體(Power System Simulator for Engineering),但 PSSE 軟體使用的是 IEEE 標準模型,由於 PSSE 軟體的內建模 型模擬是用在發電機組於正常運轉下的模擬形式,所以在使用模型模擬中要做架 構變更有相當的困難度。加上未來我們如果開發雲端線上量測,PSSE 軟體的許 可證(license)不夠所有電腦使用平行運算,二來這套軟體價格又不斐,所以綜合 以上觀點我們知道使用 PSSE 軟體不符合本研究之需求,因此論文中我們採用靈 活度相對較高的 Matlab/SimuLink 作為編輯軟體。先以實際量測之動態響應資料 定義出發電機系統模型,再利用 Matlab/SimuLink 自製模型做發電機參數驗證, 希望對於往後的電力系統模擬驗證方式能多一份貢獻。. 2.
(13) 1.3 文獻回顧 本研究的目的即是對台灣現有的發電機組模型做參數驗證,早期在台灣發展 經濟起飛下對於電力系統的發展也相對提高,電力系統的架設在短時間內逐日增 加,它包含變電所、配電所及各種電壓等級的電力線路等電力電子設備數量也都 日漸增加,所以在數量以及年代的衝擊下要對電力系統做分析相當不易,為何如 此說明,其最大的因素即是舊型的發電機組的模型參數在早期分析技術不成熟或 是年代久遠機組僅能使用典型值替代,再加上新裝設的機組均使用廠商所提供的 參數值,系統的統合中難免產生誤差,而系統分析的模型均非實測值,其精準度 有待商確,所以我們的研究成果希望能提供新的方法去做系統參數之重新驗證。 對電力系統模型參數驗證加以研究的論文很多歸納於下: 2007 年 IEEE 電力系統穩定性小組委員會提出對於發電機模型驗證測試報告 [3]中提到,同步機必須準確的建立模型以詳細的研究響應標準及各個控制系統, 而發電機模型必須能跟實際設備的性能同等承載干擾及小擾動而模擬出實際的 狀況。其中提到,製造商進行的發電機短路測試不包括磁場短路電流的短路測試, 經過不同的測試與分析方法提出需要加強突發短路測試測驗,而在文獻[4.5]中提 到利用磁場短路檢測轉子電流,以準確的了解發電機特性。 1977 年,EPRI 就有利用 Matlab 開發了發電機模型量測技術[6],但就先前 提到日新月異的發電機組,其參數不能只靠舊有的數據而不去做驗證,所以本論 文也利用了 Matlab/SimuLink 去開發了符合現代發電機組模型。 2001 年,L. N. Hannett and J. W. Felte 在論文[7]中提到,在過去幾年 新電廠及新設備的增加,也必須重要性的增加精確模型,對系統進行分析以應對 電力系統中各種干擾。綜合上述我們得知模型的精確度有兩個關鍵因素:(1). 具有適當的模型結構;(2).具有適當的參數,以應對發電機系統模型的開發的安 全性[8]。所以這裡我們再次確認了電力系統模型與參數驗證的正確與否將是電 力系統開發的首要指標之一。 3.
(14) 1.4 論文架構 本論文共分為五章,其架構列述如下: 第一章. 緒論: 簡述本論文的研究背景、動機、目的以及論文架構. 第二章. 模型分析: 敘述本論文所使用的發電機模型、渦輪機與勵磁系統類型,與渦輪控制 系統約略架構,另外將介紹本論文所採用的各項試驗。. 第三章. 發電機模型: 渦輪機模型設計之控制器與架構,Matlab/SimuLink 自製模型做比較。. 第四章. 試驗測試: 將使用 Matlab/SimuLink 自製模型與實測資料做比對與探討,做各項試 驗之比較。. 第五章. 結論與未來展望: 為本文的研究過程及結果做扼要的總結,並且說明未來研究方向之展 望。. 4.
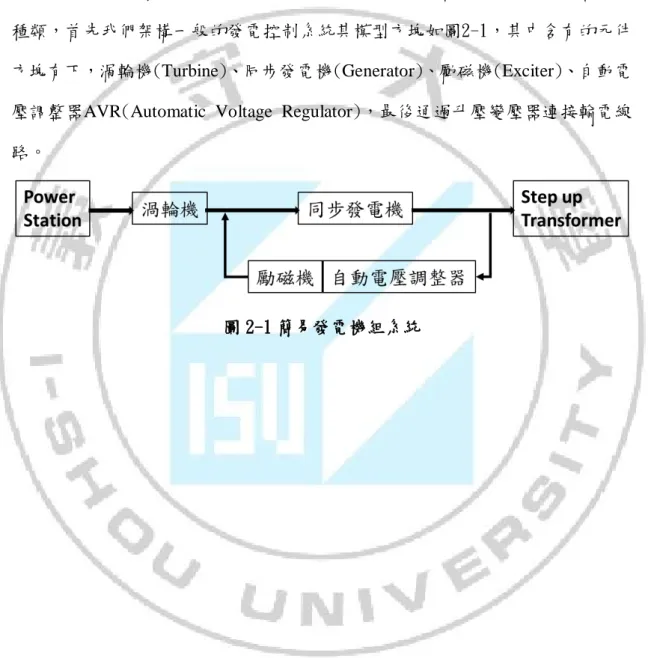
(15) 第二章 模型分析 2.1 前言 本章節我們會先介紹發電機與發電機模型,再介紹渦輪機,進而提到渦輪機 種類,首先我們架構一般的發電控制系統其模型方塊如圖2-1,其中含有的元件 方塊有下,渦輪機(Turbine)、同步發電機(Generator)、勵磁機(Exciter)、自動電 壓調整器AVR(Automatic Voltage Regulator),最後通過升壓變壓器連接輸電線 路。. 圖 2-1 簡易發電機組系統. 5.
(16) 2.2 同步發電機 同步發電機由渦輪機以固定轉速帶動旋轉,如圖 2-2 所示。磁場回路由直流 電流產生磁場,直流電由同軸之勵磁機或勵磁系統供應。一般我們用其轉子型式 去區分結構,可以分成隱極式與凸極式。 本次論文使用的發電機模型為隱極式發電機。 隱極式發電機的常用模型是 GENROU,其特色是: (1).磁極極數少。 (2).轉速快。 (3).轉子直徑短。 (4).轉軸長。 (5).通常無阻尼繞阻,在暫態發生時,轉子內部會直接感應電流。 (6).適用於汽輪發電機。 而運轉方式,先由外部輸入直流電作為勵磁繞組的電源,使發電機之轉子產 生磁場,進而使定子繞阻作磁場切割,產生三相向交流電其典型參數範圍如表 2-1 所示[9]。 凸極式發電機的常用模型為 GENSAL,其特色是: (1).磁極極數多。 (2).轉速相對慢。 (3).轉子直徑長。 (4).轉軸短。 (5).一般在轉軸兩端裝設阻尼繞阻,當轉子受暫態干擾產生振盪時,具有相 當於阻尼作用。 (6).適用於水輪發電機。 其典型參數範圍如表 2-2 所示[9]. 6.
(17) 圖 2-2 同步機之概要表示圖 圖 2-2 所示為一基本三相同步發電機,定子包含三組線圈,aa′ 、bb′、cc ′ , 相互間位距 120∘電氣角。當轉子被勵磁以產生ψ的氣隙磁通,且以固定角速度 ω旋轉時,線圈上的磁交鏈(flux linkage)便隨著轉子磁動勢軸心ωt 之位置而變化, 其中ωt 為距離aa′ 線圈磁軸之電氣角弳度值。對於 N 匝、集中繞阻之aa′ 線圈的 磁交鏈而言,當ωt = 0 時,其值(Nψ)為最大,當ωt=π/ 2 時磁交鏈則為零。若 假設分布繞阻時,磁交鏈λ 將隨角度ωt 之變化,因此,a 線圈的磁交鏈為 𝛌𝛌𝐚𝐚 =Nψcosωt. a. (2.1). 根據法拉第定律,可得aa′ 線圈之感應電壓為 𝐝𝐝𝐝𝐝. π. 𝐞𝐞𝐚𝐚 =− 𝐝𝐝𝐝𝐝 =𝛚𝛚𝐍𝐍ψsin𝛚𝛚𝛚𝛚 =𝐄𝐄𝐦𝐦𝐦𝐦𝐦𝐦 sin𝛚𝛚𝛚𝛚=𝐄𝐄𝐦𝐦𝐦𝐦𝐦𝐦 cos(𝛚𝛚𝛚𝛚 − 2 ). (2.2). 其中 𝐄𝐄𝐦𝐦𝐦𝐦𝐦𝐦 =𝛚𝛚𝐍𝐍ψ=2𝛑𝛑𝛑𝛑𝐍𝐍ψ. 因此,發電電壓有效值就為 E= 4.44f𝐍𝐍ψ. (2.3). 7.
(18) 表 2-1 GENROU GENROU 模型參數. 參數意義. 典型值範圍. X"d. D 軸次暫態電抗. 0.12 - 0.25. X'd. D 軸暫態電抗. 0.15 - 0.4. Xd. D 軸電抗. 1.0 - 2.3. X'q. Q 軸暫態電抗. 0.3 - 1.0. Xq. Q 軸電抗. 1.0 - 2.3. X1. X1. 0.1 - 0.2. T"do. D 軸次暫態開路時間常數. 0.02 - 0.05. T'do. D 軸暫態開路時間常數. 3.0 - 10.0. T"qo. Q 軸次暫態開路時間常數. 0.02 - 0.05. T'qo. Q 軸暫態開路時間常數. 0.5 - 2.0. H. 標么慣量常數. 2.5 - 6.0. D. 阻尼係數. 0-1. S1.0. 100%額定電壓下的飽和係數. 0 < S1.0 < S1.2. S1.2. 120%額定電壓下的飽和係數. S1.0 < S1.2. 通常無阻尼繞阻,在暫態發生時,轉子內部會直接感應勵磁電流。而運轉方 式,先由外部輸入直流電作為勵磁繞組的電源,使發電機之轉子產生磁場,進而 使定子繞阻作磁場切割,產生三相交流電。. 8.
(19) 表 2-2 GENSAL GENSAL 模型參數. 參數意義. 典型值範圍. X"d. D 軸次暫態電抗. X'd. D 軸暫態電抗. 0.2 - 0.5. Xd. D 軸電抗. 0.6 - 1.5. Xq. Q 軸電抗. 0.4 - 1.0. X1. X1. 0.1 - 0.2. 0.15 - 0.35. T"do. D 軸次暫態開路時間常數. T'do. D 軸暫態開路時間常數. 1.5 - 9.0. T'qo. Q 軸暫態開路時間常數. 0.01 - 0.09. 0.01 - 0.05. H. 標么慣量常數. 2-4. D. 阻尼係數. 0-1. S1.0. 100%額定電壓下的飽和係數. 0 < S1.0 < S1.2. S1.2. 120%額定電壓下的飽和係數. S1.0 < S1.2. 一般在轉軸兩端裝設阻尼繞阻,當轉子受暫態干擾產生振盪時,具有相當於 阻尼作用。而運轉方式,與隱極式相同,先由外部輸入直流電作為勵磁繞組的電 源,使發電機之轉子產生磁場,進而使定子繞阻作磁場切割,產生三相交流電。. 9.
(20) 2.3 勵磁機 首先,同步發電機為了實現動能與功的轉換,則需要有一個直流磁場,而為 了產生這個磁場的直流電流稱之為發電機的勵磁電流。同步發電機的磁場繞線組 是由一直流產生器供給全部或部分直流電流,此直流產生器就稱為勵磁機。 再根據勵磁電流的供給方式區分,凡是從其它電源獲得勵磁電流的發電機, 稱為他勵發電機,如圖 2-3,他勵發電機可以分成直流勵磁機、交流勵磁機,而 交流勵磁機又分成有刷式、無刷式兩種。而從發電機本身獲得勵磁電源的稱為自 勵發電機。. 勵磁系統有三個基本目的: (1)交流電經整流器整流成直流後,經勵磁繞組,作為建立發電機磁場。 (2)可經由勵磁系統裡面的自動電壓調節器,調整發電機的功率因數、發電機端 電壓及虛功功率。 (3)為了避免發電機組有不正常的運轉狀態,必須對發電機與勵磁機,提供保護 與補償動作。 目前台灣最常見的勵磁系統是交流勵磁系統中的他勵靜止勵磁[9],會於 2.3.1 節再做介紹。 早期電廠是由一些勵磁機並聯運轉饋送至勵磁母線(Bus),以供給多台的交流 發電機磁場,而目前採用每部交流發電機有它獨自的勵磁機,以提高可靠度,對 使用自動電壓調整器有較佳的配合,勵磁機的容量必需足夠供給發電機於額定功 率因數、額定轉速及額定電壓 160%至 200%之出力。. 10.
(21) 圖 2-3 簡易他勵勵磁系統 端電壓與磁場大小的關係,從法拉第定律來看,E=kφω ( E:發電機的端電 壓、k:常數、φ:勵磁、ω:轉速),當 k 與 ω 設為常數時,則當勵磁上升時端 電壓亦上升,可以從可圖 2-3 發現,勵磁的大小是由勵磁電壓控制,因此可以推 得一個正比關係,VF 正比於 IF、φ 與 E(VF:勵磁電壓、IF:勵磁電流)。但在 實際發電機裡,由於勵磁繞組會產生磁飽和現象,即勵磁電流提升發電機端電壓 到一定程度後,會產生磁場飽和現象,而此磁場飽和現象必須另外量測計算[9]。. 11.
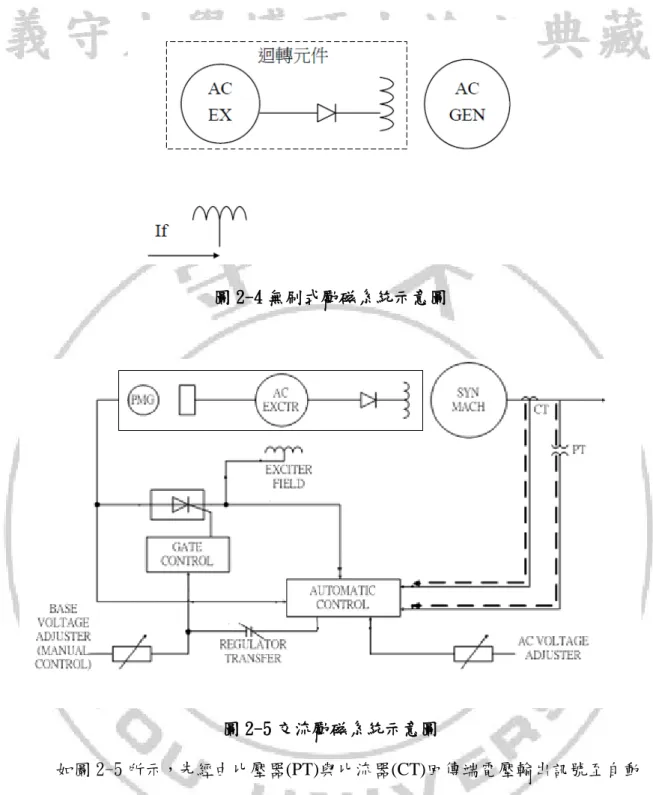
(22) 2.3.1 勵磁機類別. (1).直流發電機供電的勵磁方式:這種勵磁方式的發電機具有專用的直流發 電機,這種專用的直流發電機稱為直流勵磁機,勵磁機一般與發電機同軸,發電 機的勵磁繞組通過裝在大軸上的滑環及固定電刷從勵磁機獲得直流電流。這種勵 磁方式具有勵磁電流獨立,工作比較可靠和減少自用電消耗量等優點,是過去幾 十年間發電機主要勵磁方式,具有較成熟的運行經驗。缺點是勵磁調節速度較慢, 維護工作量大,故在 10MW 以上的機組中很少採用。. (2).交流勵磁機供電的勵磁方式,現代大容量發電機有的採用交流勵磁機提 供勵磁電流。交流勵磁機也裝在發電機大軸上,它輸出的交流電流經整流後供給 發電機轉子勵磁,此時,發電機的勵磁方式屬他勵磁方式,又由於採用靜止的整 流裝置,故又稱為他勵靜止勵磁,交流副勵磁機提供勵磁電流,如圖 2-4。交流 副勵磁機可以是永磁發電機(PMG)或是具有自勵恒壓裝置的交流發電機。為了 提高勵磁調節速度,交流勵磁機通常採用 100~200Hz 的中頻發電機,而交流副 勵磁機則採用 400~500Hz 的中頻發電機。這種發電機的直流勵磁繞組和三相交 流繞組都繞在定子槽內,轉子隻有齒與槽而沒有繞組,像個齒輪,因此,它沒有 電刷,滑環等轉動接觸部件,如圖 2-5,具有工作可靠,結構簡單,製造工藝方 便等優點。缺點是噪音較大,交流電勢的諧波分量也較大。 而有刷式需經過電刷與滑環傳送電壓至轉軸上,是屬於較中型的勵磁系統, 但發電機的勵磁電流大於 8000 安培時,因電刷與滑環可能有損壞現象,固大型 機組上使用無刷式較為適合[9.11.12]。. 12.
(23) 圖 2-4 無刷式勵磁系統示意圖. 圖 2-5 交流勵磁系統示意圖 如圖 2-5 所示,先經由比壓器(PT)與比流器(CT)回傳端電壓輸出訊號至自動 控制(Automatic Control),與基準值做比較後,經由 AVR 再將訊號輸入至放大器 訊號放大,而放大後的訊號輸入至矽控整流器整流成直流電,此直流電為勵磁機 的勵磁電壓,作為勵磁機的磁場,同時將直流電回授至自動控制裡,目的是提高 自動控制的穩定性[11]。. 13.
(24) (3).靜態勵磁機的勵磁方式為,在勵磁方式中不設置專門的勵磁機,而從發 電機本身取得勵磁電源,經整流後再供給發電機本身勵磁,稱自勵式靜止勵磁。 自勵式靜止勵磁可分為自並勵和自複勵兩種方式。自並勵方式它通過接在發電機 出口的整流變壓器取得勵磁電流,經整流後供給發電機勵磁,電刷與滑環直接傳 入發電機的勵磁繞阻,發電機轉子部分就無時間延遲現象,如圖 2-6、2-7,這 種勵磁方式具有結簡單,設備少,投資省和維護工作量少等優點。自複勵磁方式 除沒有整流變壓外,還設有串聯在發電機定子回路的大功率電流互感器。這種互 感器的作用是在發生短路時,給發電機提供較大的勵磁電流,以彌補整流變壓器 輸出的不足。這種勵磁方式具有兩種勵磁電源,通過整流變壓器獲得的電壓電源 和通過串聯變壓器獲得的電流源。. 圖 2-6 靜態勵磁機示意圖. 圖 2-7 靜態勵磁機示意圖 14.
(25) 2.4 自動電壓調節器 自動電壓調整器主要目的是維持負載變化時發電機端電壓以及系統故障時 之暫態穩定度,如圖2-8為勵磁控制系統示意圖。使用自動電壓調整器於發電機 並聯系統時,發電機的無效電力隨系統變動而改變。假如發電機端電壓降低,自 動電壓調整器便會偵測到降低信號,將自動增加同步發電機磁場勵磁,使發電機 端電壓回升到正常值。另外,若是只擁有高零敏度及短暫的反應速度,往往容易 出現因過度放大而造成勵磁機失控現象,所以必須還有穩定的回授系統來控制。 故其必需備有: (1).靈敏度高:自動電壓調整器要靈敏度高,必須有高放大倍數。 (2).速應性良好:自動電壓調整器反應要快。 (3).穩定性良好:自動電壓調整器要穩定,不能有過度或不良之不穩定狀態發 生。. 圖 2-8 勵磁控制系統示意圖 15.
(26) (a).參考信號輸入: 基準參考電壓值,其作用在於校正,經由傳導器輸出與基準值作比較,若 高於基準值,則會產生一訊號誤差,其誤差為負值,則影響發電機端電壓下降, 反之若低於基準值,則會輸出一正誤差值,影響發電機端電壓上升[10]。 (b).傳送器: 傳送同步發電機的端電壓,是電壓調節器與發電機作為一個訊息連接的橋梁, 電壓調節器可以依照其輸入電壓訊號值,來判定輸出上升或下降[10]。 (c).勵磁限制器: 為了避免發電機在電力系統中出現不正常狀態,自動電壓調節器增加了勵磁 限制器,分為最大限制器(過勵磁限制)與最小限制器(欠勵磁限制)兩種控制器。 如圖 2-9 所示,當自動電壓調整器提供發電機端電壓高於系統的電壓時,自動電 壓調整器為了防止勵磁線圈燒毀,將限制過勵磁電壓。當發電機端電壓低於系統 的電壓時,此時發電機輸入虛功,自動電壓調節器為了防止發電機的鐵心過熱, 因此將限制欠勵磁電壓[10]。. 圖 2-9 發電機容量曲線示意圖 16.
(27) (d).電力系統穩定器: 根據輸入訊號分為轉速、頻率、功率三種類,去調整改善電力系統的動態性 能。主要在於增加阻尼,因自動電壓調節器是專門用來調節電壓大小的裝置,但 當勵磁系統反應過快時,造成阻尼減少而同步發電機產生低頻振盪現象,因此增 加阻尼,提高系統快速回到穩定的狀態[10]。 (e).補償器: 目的在於消除穩定誤差,而達到改善動態響應,其主要可分成兩大類,一是 由比例積分微分所組合而成的 PID 類型,另一是由領先與落後的方式來當作補 償器[10]。 (f). 斜率回授: 目的在於提升勵磁機組的穩定度,在自動電壓調節器中,輸入一訊號至放大 器放大後,所輸出的值可能不盡滿意,但若在提升放大器的增益值後,可能會造 成自動調節器產生過度放大現象,所以需要再其中增加一個穩定勵磁系統的控制 器,進而提升自動控制的穩定性[11]。 (g).放大器: 其目的在於放大傳送的校正值,並傳送至勵磁機,其種類分成旋轉放大器、 磁力放大器與矽控放大器,在勵磁種類中,矽控放大器為最常用到的放大器 [10]。. 17.
(28) 2.5 渦輪機與調速機 一開始我們知道渦輪機(turbine)將是最直接影響發電機的動能,當渦輪的 轉速越高時,動能也就越大,實功也就越高。 雖然渦輪發動機可能有許多不同的運作原理,但最簡單的渦輪型式可以只包 含一個「轉子」(Rotor),例如一個帶有中心軸的扇葉,將此扇葉放置在流體中 (例如空氣或水),流體通過時對扇葉施加的力量會帶動整個轉子開始轉動,進 而得以從中心軸輸出軸向的扭力、如圖 2-10。而風車與水車這類的裝置,可以 說是人類最早發明的渦輪發動機原型[14]。. 圖 2-10 渦輪葉片轉動示意圖. 而在發電廠場的結構中,就會有鍋爐燃燒產生熱能,熱能煮沸鍋爐裡的水產 生水蒸氣,接著,這些水蒸汽將以渦輪增壓的方式經由管路噴向渦輪機,推動葉 片使渦輪機旋轉。然後,以轉軸和渦輪機相連接的同步發電機(generator)也就 跟著被帶動起來,同步發電機的轉軸跟渦輪機的轉軸是相連接的,所以渦輪機轉 動時則發電機也就跟著轉動,轉動輪軸電線於磁場中轉動進行磁場切割,便會在 導體中產生電流,於是這以機械旋轉的動能就被發同步發電機轉變成了電能。. 18.
(29) 鍋爐通常是用煤、石油、或天然氣做為燃料來燃燒發熱的,在鍋爐中燃燒的 火焰上方裝設有一列一列的金屬水管。這些水管受熱後再把熱能傳導給在管中流 通的水,把水加熱變成蒸汽,再噴向渦輪機。在我們的日常生活中,水在華氏溫 度為 212 度(或說是攝氏 100 度)的時候沸騰變成蒸汽。但是從鍋爐送出來推動 渦輪機的蒸汽的溫度更高,壓力也大得多。渦輪機外觀跟電扇有點類似,但二者 並不相同。在渦輪機的轉軸上有許多的葉片,就如同電扇有葉片一樣。當蒸汽吹 向渦輪機的葉片時,轉軸也就被帶動旋轉起來了。當蒸汽通過渦輪機以後就會被 引導到一個叫做冷卻塔(cooling tower)的地方,蒸汽在此冷卻變成水。引導蒸 汽的熱管子在冷卻塔裡接觸到冷空氣時,冷空氣中所含的水氣會因為被加熱而變 成蒸汽,這蒸汽就是我們看到在冷卻塔上頭飄動的白霧。管子裡的蒸汽被冷卻成 水以後就會再次流入鍋爐中加熱。然後這樣的過程就一次又一次的重複進行著, 如圖 2-11。 在美國大多數的發電廠以燃燒天然氣做為發電用的能源。燃燒天然氣來發電 是比較潔淨的,比較沒有汙染。有些發電廠則是使用核能做為發電能源,即核能 發電。另外還有一些是直接利用來自地表下面的蒸汽或熱水來發電的,就不需要 再燃燒燃料。. 19.
(30) 圖 2-11 渦輪系統示意圖 上圖由四個主要元件形成的朗肯循環。(1).給水泵浦 (2).鍋爐或蒸汽產生 器 (3). 引擎或渦輪機 (4).冷凝器。其中 Q 為熱能,W 為作功,大部份的熱都 變成無法作功的廢熱[14]。. 渦輪機大致分為三種,(1).蒸汽渦輪機,高壓汽輪機由一系列帶有螺旋槳式 的槳葉轉盤組成,使用了朗肯循環蒸汽機的熱力學循環,且用到了水的相變化(將 水煮沸產生水蒸氣,將水蒸氣冷凝產生液態水)來實現熱和功的轉換。 (2).燃氣渦輪機,首先由壓縮器加壓成高壓氣體,接著由噴油嘴噴出燃油與空氣 混合後在燃燒室進行燃燒成為高溫高壓氣體,然後進入渦輪段推動渦輪,將熱能 轉換成機械能輸出,氣渦輪發動機可以接受多種燃料,例如汽油、天然氣、丙烷、 柴油、煤油。 (3).水渦輪機,是利用水的落差在重力作用下形成動能從河流或水庫等高位水源 處向低位處引水,利用水的壓力或流速沖擊水輪機,使之旋轉,從而將位能轉化 為機械能。. 20.
(31) 而調速器負責調整蒸汽閥位置,當參考實功準位 Pref 上升(或是下降)時可 以控制渦輪機的機械出力 Pm。同時,調速器亦監控轉速 ωm,其提供回授信號 控制 Pm 和 Pe(發電機電力輸出)間維持平衡。若不考慮損失,如 Pm 大於 Pe, 則 ωm 增加,將導致調速器往關閉蒸汽閥的方向移動並減低 Pm;相反地,如果 Pm 小於 Pe,則 ωm 減低,導致調速器往開啟蒸汽閥的方向移動並增加 Pm。. 21.
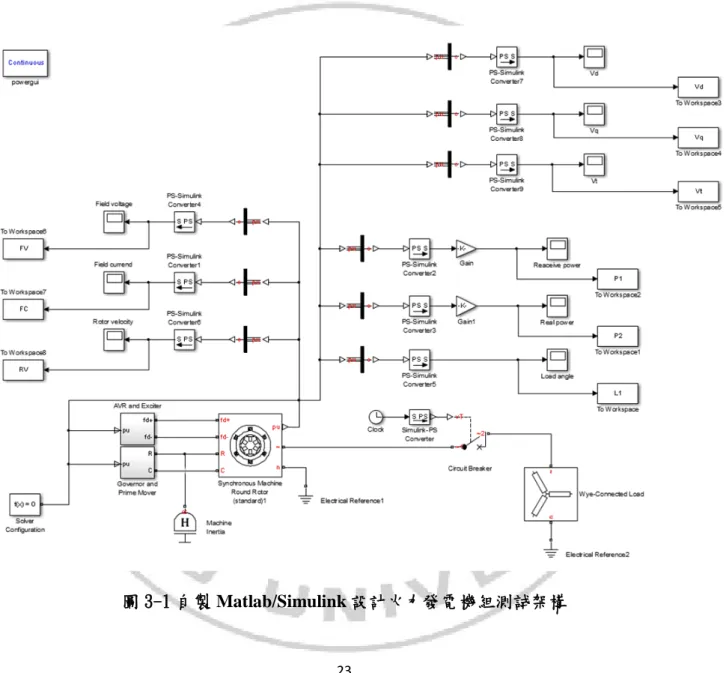
(32) 第三章 發電機模型 3.1 前言 本章經由Matlab/Simulink設計發電機組模型,而這是我們第一次架構三階模 型,能比二階模型更加精準,能使用的參數也更多,包含發電機、渦輪機、AVR 及勵磁機,再與PSSE模擬結果做比對。本章分成兩部分,第一部分介紹發電機 模組,而這次有兩種發電機模組,分為火力與水力。第二部分將會以 Matlab/Simulink自製模型與PSSE模型做相互對比,自製模型是參照IEEE說明圖 所繪製,在最後會附上各個發電機組模型參數典型值範圍。. 3.2 火力發電機模型 本次論文所使用的火力發電機參考模型為台灣電力公司大林的火力發電廠, 大林電廠共安裝有六台汽輪發電機組。某機組的同步發電機其額定容量為 442 MVA、額定電壓為 17 kV。發電機激磁系統是由無刷式交流激磁機加迴轉整流 器、電壓調整器和副激磁機(PMG)組成,其控制系統採用的台電電力修護處研 製的數位複聯式電壓調節器。該數位式激磁控制系統除了實現發電機電壓的控制 與調節所需要的自動與手動等基本功能外,還含有許多發電機的保護與限制功能 以及内置式電力系統穩定器(PSSE)軟體模組。汽輪機是由具有單一再熱器的高、 中、低壓缸三部分組成,其額定功率輸出為 375 MW。控制汽輪機的調速機是日 本三菱公司(Mitsubishi)製造的常規式機械液壓調速器。 圖 3-1 為自製以 Matlab/Simulink 設計火力發電機組模型,其中包含自製 EXAC1 勵磁機與 AVR 模型、自製 IEEEG1 汽輪機與調速機模型、同步發電機、 斷路器以及三項負載。. 22.
(33) 圖 3-1 自製 Matlab/Simulink 設計火力發電機組測試架構. 23.
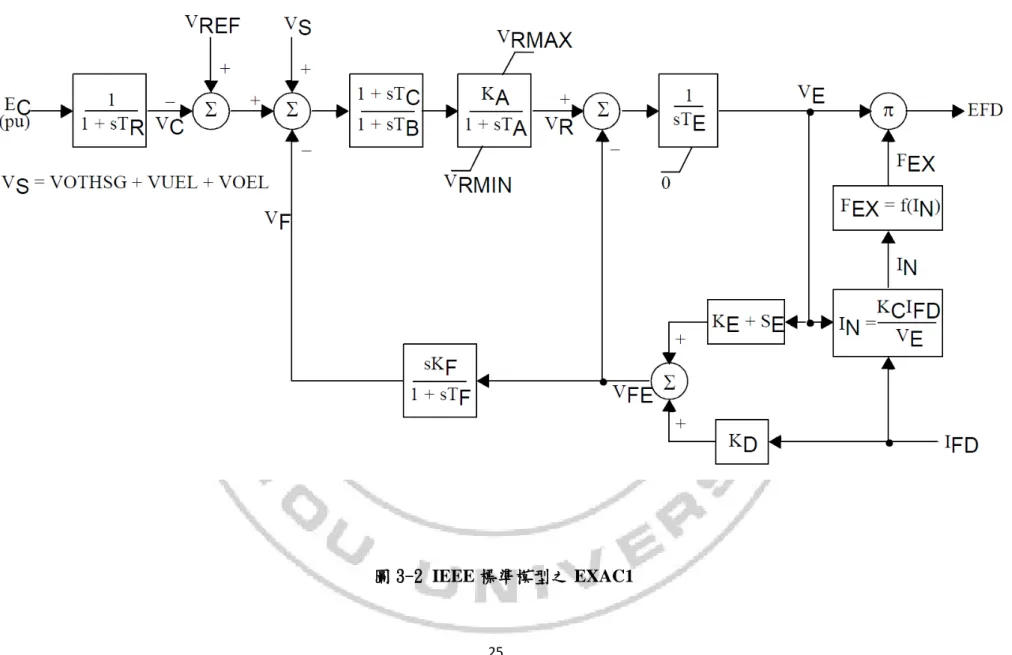
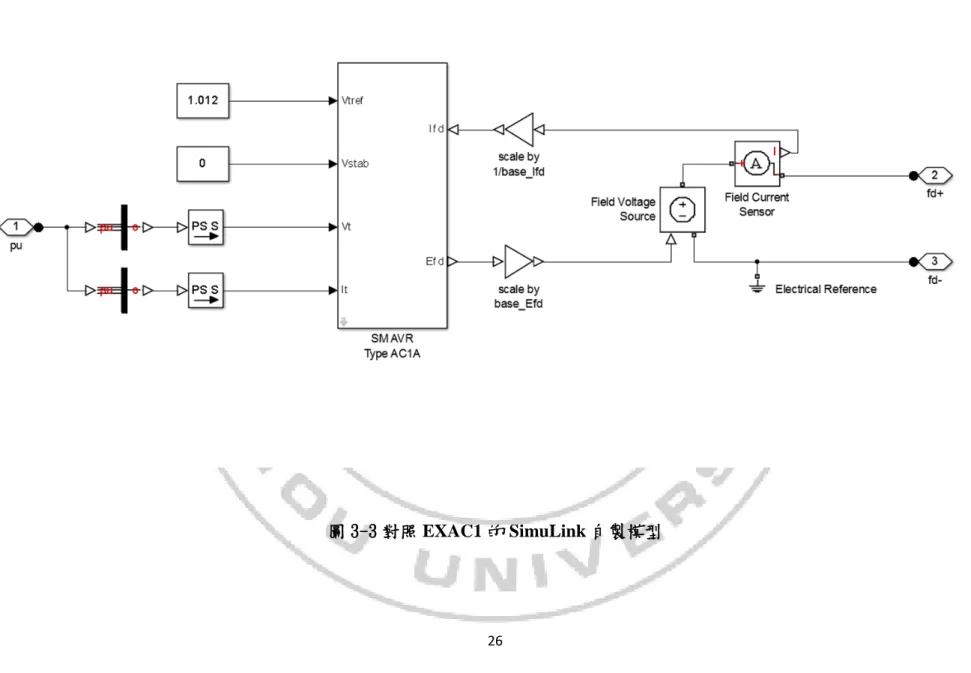
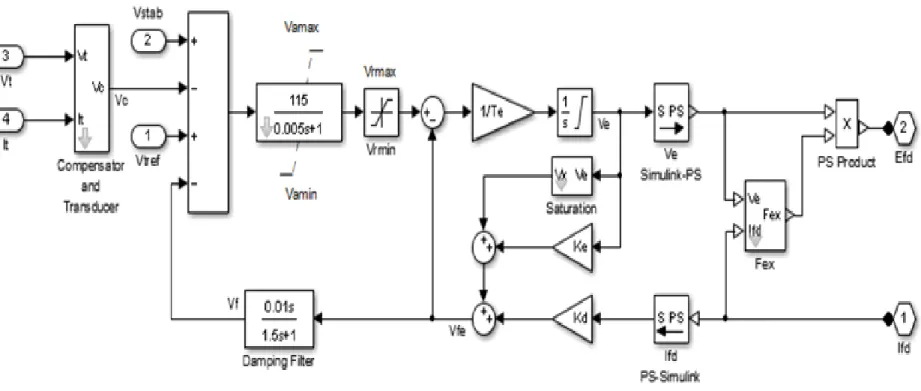
(34) 3.2.1 勵磁機與 AVR 模型 本章節為 IEEE type 1 勵磁系統模型於 1981 提出,包含勵磁機與自動電壓 調節機,圖 3-2 為 IEEE 之標準模型 EXAC1,圖 3-3 為對照 EXAC1 的 SimuLink 自製模型,圖 3-4 為 SimuLink 自製模型 EXAC1 之 SM AVR Type AC1A 展開, 對照主要將 Matlab/SimuLink 自製模型與 PSSE 模型做對比,並附上模型參數之 典型值。. 24.
(35) 圖 3-2 IEEE 標準模型之 EXAC1. 25.
(36) 圖 3-3 對照 EXAC1 的 SimuLink 自製模型. 26.
(37) 圖 3-4 SimuLink 自製模型 EXAC1 之 SM AVR Type AC1A 展開. 27.
(38) 表 3-1 典型值之 EXAC1 EXAC1 模型參數. 典型值範圍. TR. 0-0.5. TB. 0-20. TC. 0-20. KA. 0-1000. TA. 0-10. VAMAX. 0-15. VAMIN. -15-0. TE. 0.033-2. KF. 0-0.3. TF. 0.33-1.5. KC. 0-1. KD. 0-1. KE. 0-1. E1. 無. SE1. 無. E2. 無. SE2. 無. 28.
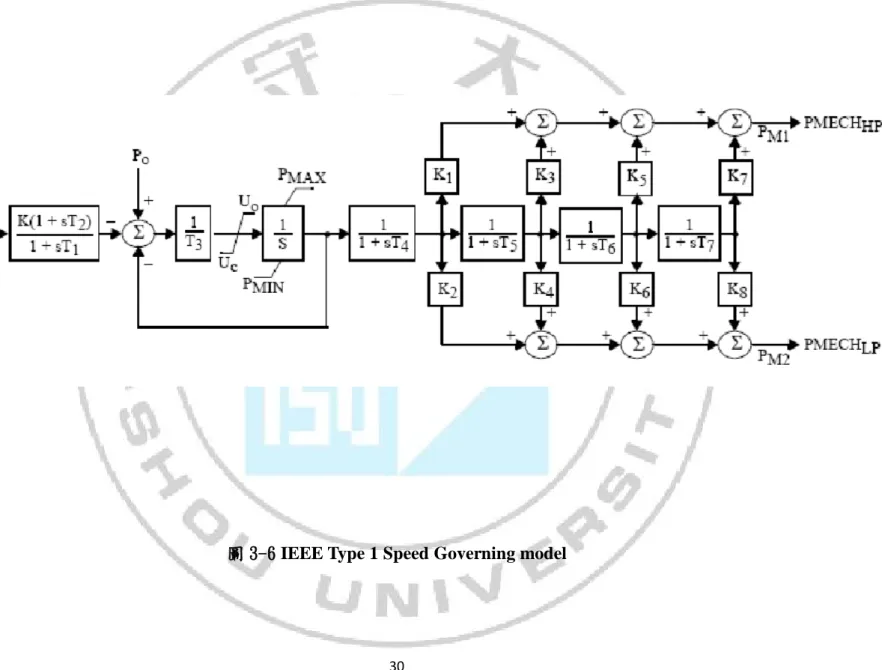
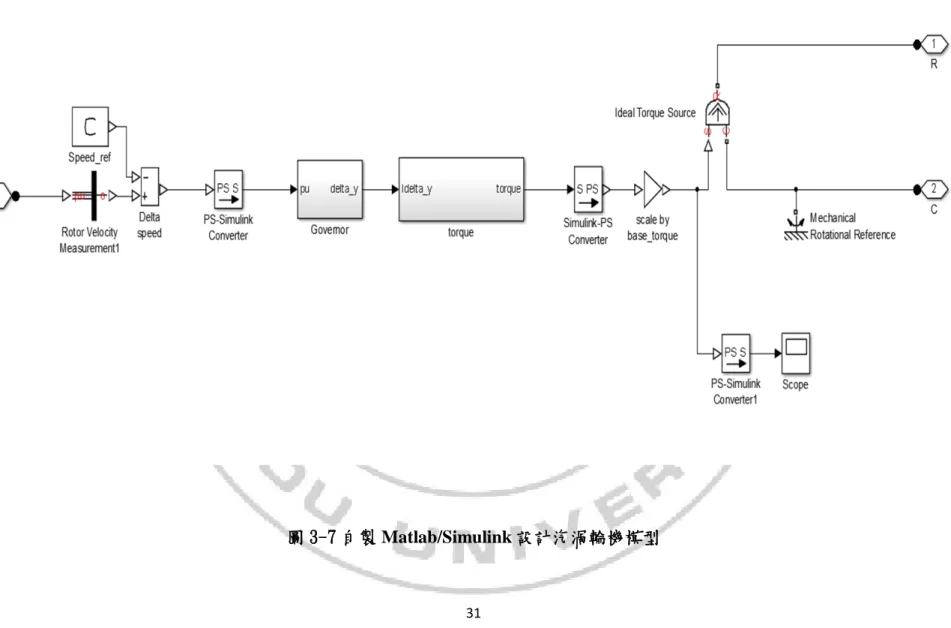
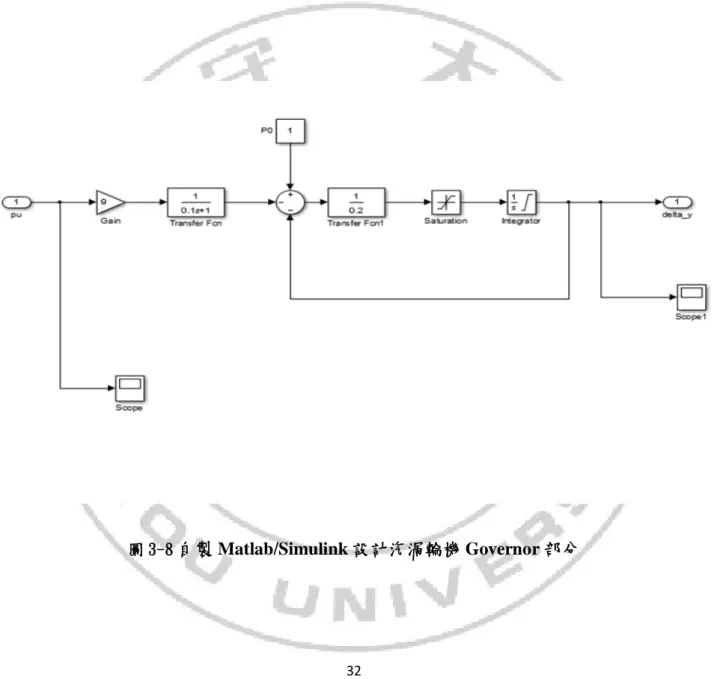
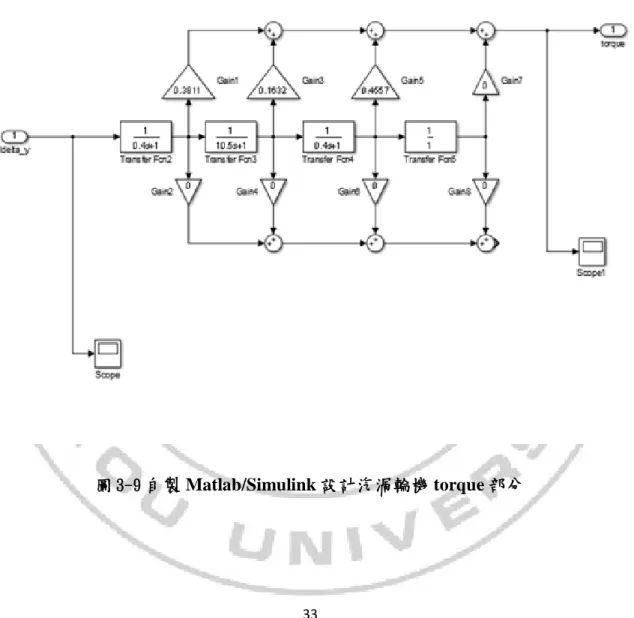
(39) 3.2.2 火力渦輪機模型 本次論文中使用的是 IEEE Type 1 Speed Governing model PSSE 模型,而參 數使用的是台電大林電廠的某機組,某機組屬於汽輪機,是由具有單一再熱器的 高、中、低壓缸三部分組成,其機械式液壓調速器有兩種運行方式。在機組正常 發電運行時,該調速器工作於負荷控制方式,其控制目標總是保持機組的有效功 率出力不變。即使在電網頻率偏離額定值時,該機組的有效功率出力也不會隨著 電網的頻率下降而增加,或隨著電網的頻率上升而減小。因此在進行電力系統模 擬計算分析時,該汽輪機的機械功率可以假設為恆定,即該機組的調速器模型不 應考慮在内。圖 3-6 為 IEEE Type 1 Speed Governing model,圖 3-7 為自製 Matlab/Simulink 設計汽渦輪機模型並以我們的實驗需求做架構上的變化,圖 3-8 為汽渦輪機 Governor 部分,圖 3-9 為汽渦輪機 torque 部分,並附上模型參數之典 型值。. 29.
(40) 圖 3-6 IEEE Type 1 Speed Governing model. 30.
(41) 圖 3-7 自製 Matlab/Simulink 設計汽渦輪機模型. 31.
(42) 圖 3-8 自製 Matlab/Simulink 設計汽渦輪機 Governor 部分. 32.
(43) 圖 3-9 自製 Matlab/Simulink 設計汽渦輪機 torque 部分. 33.
(44) 表 3-2 汽輪機及調速機模型參數 模型參數(PSSE 模型 IEEEG1). PSSE 典型值. K. 5.0 ≤K≤30.. T1. 0≤T1< 5.0. T2. 0 ≤ T2< 10.0. T3. 4* DELT <T3 ≤ 1.0). Uo. 0.01 ≤ Uo ≤ 0.3. UC. –0.3 ≤UC<0.. PMAX. 0.5 ≤PMAX ≤2.0. PMIN. 0 ≤PMIN<0.5. T4. 0<T4 ≤1.0. K1. –2.0 ≤K1 ≤1.. K2. K2 = 0.. T5. 0 ≤T5<10.0. K3. 0 ≤K3<0.5. K4. 0 ≤K4<0.5. T6. 0 ≤T6<10.0. K5. 0 ≤K5<0.35. K6. 0 ≤K6<0.55. T7. 0 ≤T7<10.0. K7. 0 ≤K7<0.3. K8. 0 ≤K8<0.3. 34.
(45) 3.3 水力發電機模型 此次論文在水力發電機部份我們使用的參考模型為台灣電力公司明潭的水 力發電廠,明潭抽蓄水力發電廠位於明潭二廠下池壩的下游約四公里處,亦即於 南投縣水里鄉車埕村附近水里溪河谷興建一座高 61.5 公尺之混凝土重力壩形成 下池,並利用以日月潭為上池間平均淨水頭 380 公尺做抽蓄水力發電。明潭抽蓄 機共安裝有六台可逆型法蘭西斯式抽水/水輪機及電動/發電機機組。某機組的同 步發電機其額定容量為 300 MVA、額定電壓為 16.5 kV。水輪機的功率輸出取 決於水頭,其最大值為 275 MW、最小值為 230 MW。發電機的勵磁採用的是 由機端直接供電的靜態勵磁方式。控制水輪機的調速機是 Voith 的類比式電液調 速機,其控制邏輯採用比例-積分-微分(PID)控制方式。. 而勵磁機部分因為本次論文著重於渦輪機的探討,所以同樣使用 EXAC1 的 勵磁機模型,因此本章節將不在重新討論水力發電機的勵磁機,可參詳章節 3.2.1 勵磁機與 AVR 模型。 圖 3-10 為自製以 Matlab/Simulink 設計水力發電機組模型,其中包含自製 EXAC1 勵磁機與 AVR 模型、自製 PIDGOV 水輪機與調速機模型、同步發電機、 斷路器以及三項負載。. 35.
(46) 圖 3-10 自製 Matlab/Simulink 設計水力發電機組測試架構. 36.
(47) 3.3.1 水力渦輪機模型 本次論文所使用的水利發電機為台電明潭電廠的水力發電機,水輪機為發電 與抽水兼用的法蘭西斯(Francis)式,而調速機為類比式電液調速機。此電液調 速機的控制邏輯採用比例-積分-微分(PID)控制方式。因此,在電力系統穩定 模擬計算中,該機組的水輪機與調速機應選用 PTI 電力系統模擬軟體之 PIDGOV 調速機模型來模擬。 值得指出的是在現有電網運行規劃模型數據庫中,該水輪機與調速機用 PSSE 模型 HYGOV 來模擬。本報告所給調速機模型僅適用於機組發電運行方 式。當機組在抽水方式運行時,調速機對電網的頻率變化完全不予響應。因此, 在電力系統穩定模擬計算時,應將該調速機模型去除,即假設有效功率負荷恆定。 而勵磁機部分因為本次論文著重於渦輪機的探討,所以同樣使用 EXAC1 的勵磁 機模型,因此本章節將不在重新討論水力發電機的勵磁機,可參詳章節 3.2.1 勵磁機與 AVR 模型。 圖 3-11 為 PSSE 類別 PIDGOV 水輪機與調速機模型,圖 3-12 為自製 Matlab/Simulink 設計水輪機模型並以我們的實驗需求做架構上的變化,並附上模 型參數之典型值。. 37.
(48) 圖 3-11 PSSE 類別 PIDGOV 水輪機與調速機模型. 38.
(49) 圖 3-12 自製 Matlab/Simulink 設計水輪機模型. 39.
(50) 表 3-3 水輪機及調速機模型參數 模型參數 (PSSE 模型 PIDGOV) Rperm. 參數定義. 驗證後參數. Permanent drop, p.u.. 0.059. Speed detector time constant, sec.. 1.000. Kp. Proportional gain, p.u.. 1.400. Ki. Reset gain, pu/sec.. 0.231. Kd. Derivative gain, p.u.. 0.0. Ta. Controllertime constant, sec.. 0.1. Tb. Gate servo time constant, sec.. 0.05. Dturb. Turbine damping factor, p.u.. 0. Treg. G0. Gate opening at speed no load, p.u.. 0.154. G1. Intermediate gate opening, p.u.. 0.400. P1. Power at gate opening g1, p.u.. 0.500. G2. Intermediate gate opening, p.u.. 0.592. P2. Power at gate opening, g2, p.u.. 0.750. P3. Power at full opened gate, p.u.. 1.059. Gmax. Maximum gate opening, p.u.. 1.0. Gmin. Minimum gate opening, p.u.. 0.0. Atw. Factor multiplying tw, p.u.. 1.0. Tw. Water inertia time constant, p.u.. 1.88. Velmax. Maximum gate opening velocity, p.u./sec.. 0.062. Velmin. Maximum gate closing velocity, p.u./sec.. -0.062. 40.
(51) 3.4 小結 本章介紹了發電機大綱架構並分為水力與火力兩種,再架構勵磁機模型與汽 輪機以及水輪機,並提出由 Matlab/SimuLink 自製模型,由於是依照 IEEE 標準 模型建置,因此與 PSSE 模型做比對後,會發現到相似度極高,但相似度高不代 表模擬結果會非常類似,所以在下一章節會把模型模擬比對結果做比較。. 41.
(52) 第四章 試驗測試. 4.1 前言 本章主要將利用 Matlab/SimuLink 自製渦輪機模型與 PSSE 模型做模擬比較 後,再與實測資料做比對與探討。本章進行了火力&水力的四種卸載測試,分別 為卸實功與卸虛功,而勵磁機運轉又分為手動與自動,項目為 d 軸參數測試、q 軸參數測試、無效功率電流補償測試與部分負載卸載測試,如表 4-1。 表 4-1 測試項目型態 卸載. 勵磁機運轉. 測試項目. 卸實功. 手動. d 軸參數測試. 卸虛功. 手動. q 軸參數測試. 卸實功. 自動. 無效功率電流補償測試. 卸虛功. 自動. 部分負載卸載測試. 4.2 火力發電機測試 4.2.1 d 軸參數測試(MVar 卸載測試) 發電機直軸試驗用於驗證發電機直軸電抗值及時間常數。機組要先並聯入電 力系統,調整有效功率輸出應最大可能地接近為 0 MW,並且大約輸入 30%額定 進相無效功率(超前功率因數),激磁系統使用手動控制模式,然後打開發電機組 主斷路器。這個測試結果將被用來推導發電機 d 軸的穩態、暫態、次暫態電抗和 時間常數[15]。 42.
(53) d 軸參數試驗在實際打開機組主斷路器前,發電機的實際運行狀況如下: • 有效功率輸出. 2.02MW. • 無效功率輸出 -72.21 MVAr(欠勵) • 發電機端電壓. 15.54kV. • 勵磁機運作. 手動. 圖 4-1 為台電大林廠某機組汽輪機 d 軸測試之發電機端電壓,圖 4-2 為自製 Matlab/SimuLink 汽輪機模型 d 軸測試之發電機端電壓。. 圖 4-1 台電大林廠某機組汽輪機 d 軸測試之發電機端電壓. 43.
(54) 1.1. 1. 0.9. Vt(pu). 0.8. 0.7. 0.6. 0.5. 0.4 5 0. 6 0. 7 0. 8 0. 9 0. 1 00 Time(Sec). 11 0. 12 0. 13 0. 14 0. 15 0. 圖 4-2 自製 Matlab/SimuLink 汽輪機模型 d 軸測試之發電機端電壓. 因為在勵磁機穩定後,加入控制使勵磁機維持在穩定值而不再變化,勵磁機 成手動狀態,微量的實功加上大量的虛功,渦輪機同步轉速,60 秒後斷路器啟 動後,功率切開,端電壓下降至某值後穩定,因手動時的勵磁機導致電壓不再回 升。 圖 4-1 為台電測試模擬圖形包含量測電壓曲線、舊有模型曲線、更新模型曲 線,這邊我們要比對的是更新後的曲線圖,與圖 4-2 自製模型比對後,其暫態與 次暫態還有收斂結果是極為相似的。. 44.
(55) 4.2.2 q 軸參數測試(部分 MW 卸載測試) 發電機交軸試驗用於驗證發電機交軸電抗值及時間常數。機組要先並聯入電 力系統,調整有效功率輸出及無效功率輸出使發電機電流與 Q 軸對準。在這種 運行方式下發電機電流僅有 Q 軸分量。在激磁系統使用手動控制模式時打開發 電機組的主斷路器,發電機機端電壓的變化受 Q 軸發電機電抗及時間常數的影 響。這個測試結果要被用來推導 Q 軸的暫態、次暫態阻抗和時間常數[15]。 Q 軸參數測試在實際打開機組主斷路器前,發電機的實際運行狀況如下: • 有效功率輸出. 55.77MW. • 無效功率輸出. -11.93 MVAr(欠勵). • 發電機端電壓. 15.89kV. • 勵磁機運作. 手動. 圖 4-3 為台電大林廠某機組汽輪機 q 軸測試之發電機端電壓,圖 4-4 為自製 Matlab/SimuLink 汽輪機模型 q 軸測試之發電機端電壓。. 圖 4-3 台電大林廠某機組汽輪機 q 軸測試之發電機端電壓 45.
(56) 1.05. Vt(pu). 1. 0.95. 0.9 4 0. 50. 60. 70. 80. 90 Time(Sec). 100. 110. 120. 130. 140. 圖 4-4 自製 Matlab/SimuLink 汽輪機模型 q 軸測試之發電機端電壓. 因同樣在勵磁機穩定後,加入控制使勵磁機維持在穩定值而不再變化,使勵 磁機成手動狀態,微量的虛功加上大量的實功,在 60 秒後斷路器啟動後,渦輪 機動能無法輸出使轉速上升至定值,端電壓因微量虛功使值微量下降,之後端電 壓因渦輪機回穩後稍微回升至某值後穩定,因手動時的勵磁機導致電壓不再回升。 而為何要輸入微量虛功的原因在於安全,假設完全不給虛功的話,實功會導致轉 速急速上升,因而可能破壞絕緣,所以微量虛功可使端電壓先行下降,之後上升 後的值還是維持在 1pu 以下。 圖 4-3 為台電測試模擬圖形包含量測電壓曲線、舊有模型曲線、更新模型曲 線,這邊我們要比對的是更新後的曲線圖,與圖 4-4 自製模型比對後,其暫態與 次暫態還有收斂結果雖有震盪但還是極為相似的。. 46.
(57) 4.2.3 無效功率電流補償(電壓低垂,線路壓降補償)測試 線路壓降補償通常用來補償機組昇壓變壓器的部分阻抗並且調節發電機端 之外的某點的電壓。該補償也用於單一發電機經長輸電線接至系統或幾個並聯發 電機共用一台升 壓變壓器的 系統情形以解決無效功率在機組間的分配衝突 [15]。 無效功率電流補償(電壓低垂,線路壓降補償)測試通過無效功率卸載來進行。 發電機主要帶無效功率,電壓調節器設置在自動方式。本測試在打開機組主斷路 器前,發電機的實際運行狀況如下: • 有效功率輸出 22.81 MW • 無效功率輸出 -74.86 MVAr(欠勵) • 發電機端電壓 15.53kV • 勵磁機運作. 自動. 圖 4-5 為台電大林廠某機組汽輪機無效功率電流補償測試之發電機端電壓,圖 4-6 為自製 Matlab/SimuLink 汽輪機模型無效功率電流補償測試之發電機端電壓. 圖 4-5 台電大林廠某機組汽輪機無效功率電流補償測試之發電機端電壓 47.
(58) 1.05. Vt(pu). 1. 0.95. 0.9. 0.85 5 0. 55. 60. 65. 70 Time(sec). 75. 80. 85. 90. 圖 4-6 自製 Matlab/SimuLink 汽輪機模型無效功率電流補償測試之發電機端電 壓. 因無效功率電流補償測試中沒有加入控制使勵磁機成定值,勵磁機在自動控 制下,大量虛功雖然使端電壓急速下降,但隨後勵磁機運轉回升補正,端電壓最 後穩定並接近原本數值。 圖 4-5 為台電測試模擬圖形包含量測電壓曲線、舊有模型曲線、更新模型曲 線,這邊我們要比對的是更新後的曲線圖,與圖 4-6 自製模型比對後,自製模型 中斷路器設定於 59 秒起動後,雖然補正時經幾段震盪回朔,但端電壓下降值量 接近於模擬,而收斂時間約四秒也近於模擬值,最後回升值誤差也在 0.01pu 內。. 48.
(59) 4.2.4 部分負載卸載試驗 部分負載卸載試驗用於驗證發電機組的慣性時間常數以及部分調速機模型 參數。在發電機帶部分負載,打開機組主斷路器後,發電機轉速的變化被用來驗 證機組的慣量及調速機的響應。由於前述 Q 軸參數試驗可以完全滿足上述要求。 Q 軸參數試驗的結果同時被用來驗證發電機組的慣性時間常數以及調速機的模 型參數,以避免卸載試驗對機組的衝擊。因此,本節描述的卸載試驗與 Q 軸參 數試驗實際上為同一個試驗,其發電機在打開主斷路器前的運行狀當然也與 Q 軸參數試驗完全相同[15]。 部分負載卸載試驗在實際打開機組主斷路器前,發電機的實際運行狀況如下: • 有效功率輸出. 55.77MW. • 無效功率輸出. -11.93 MVAr(欠勵). • 發電機端電壓. 15.89kV. • 勵磁機運作. 自動. 圖 4-7 為台電大林廠某機組汽輪機部分負載卸載試驗之發電機轉速,圖 4-8 為自 製 Matlab/SimuLink 汽輪機模型部分負載卸載試驗之發電機轉速。. 圖 4-7 台電大林廠某機組汽輪機部分負載卸載試驗之發電機轉速 49.
(60) 63. 62.4. 61.2. (60Hz). 發電機頻率. 61.8. 60.6. 60. 59.4 55. 60. 65. 70. 75. 80. 85. 90. Time(Sec). 圖 4-8 自製 Matlab/SimuLink 汽輪機模型部分負載卸載試驗之發電機轉速. 在轉速部分因導入大量實功,所以轉速在動能沒有輸出的情況下越轉越快, 但是渦輪機在調速機的控制下轉速收斂,最後穩定值略高於原本轉速。 圖 4-7 為台電測試模擬圖形包含量測電壓曲線、舊有模型曲線、更新模型曲 線,這邊我們要比對的是更新後的曲線圖,與圖 4-8 自製模型比對後,Y 軸為發 電機頻率,在斷路器設定於 60 秒啟動後,轉速的爬升與最後收斂值都相當接近 於模擬值。. 50.
(61) 4.3 水力發電機測試 4.3.1 d 軸參數測試(MVar 卸載測試) 發電機直軸試驗用於驗證發電機直軸電抗值及時間常數。機組要先並聯入電 力系統,調整有效功率輸出應最大可能地接近 0 MW,並且大約輸入 30%額定進 相無效功率(超前功率因數),勵磁系統使用手動控制模式,然後打開發電機組主 斷路器。這個測試結果將被用來推導發電機 d 軸的穩態、暫態、次暫態電抗和時 間常數[16]。 d 軸參數試驗在打開機組主斷路器前,發電機的實際運行狀況如下: . 有效功率輸出. 0MW. . 無效功率輸出. -60.09 MVAr(欠勵). . 發電機端電壓. 16.18 kV. . 勵磁機運作. 手動. 圖 4-9 為 台 電 明 潭 廠 水 輪 機 d 軸 參 數 測 試 之 端 電 壓 , 圖 4-10 為 自 製 Matlab/SimuLink 水輪機模型 d 軸參數測試之端電壓。. 量測電壓 舊有模型 更新模型. 圖 4-9 台電明潭廠水輪機 d 軸參數測試之端電壓 51.
(62) 1.3. 1.2. 1.1. 1. Vt(pu). 0.9. 0.8. 0.7. 0.6. 0.5. 0.4 8 0. 90. 100. 110. 120 Time(Sec). 130. 140. 150. 160. 圖 4-10 自製 Matlab/SimuLink 水輪機模型 d 軸參數測試之端電壓. 因為在勵磁機穩定後,加入控制使勵磁機維持在穩定值而不再變化,勵磁機 成手動狀態,0 實功加上大量的虛功,渦輪機同步轉速,在 100 秒後斷路器啟動 後,功率切開,端電壓下降至某值後穩定,因手動時的勵磁機導致電壓不再回升。 圖 4-9 為台電測試模擬圖形包含量測電壓曲線、舊有模型曲線、更新模型曲 線,這邊我們要比對的是更新後的曲線圖,與圖 4-10 自製模型比對後,其暫態 與次暫態還有收斂結果是相似的,而次暫態雖比台電模擬下降值還多,但最後收 斂型態是符合模擬結果。. 52.
(63) 4.3.2 q 軸參數測試(部分 MW 卸載測試) 發電機交軸試驗用於驗證發電機交軸電抗值及時間常數。機組要先並聯入電 力系統,調整有效功率輸出及無效功率輸出使發電機電流與 q 軸對準。在這種運 行方式下發電機電流僅有 q 軸分量。在勵磁系統使用手動控制模式時打開發電機 組的主斷路器,發電機機端電壓的變化主要由 q 軸發電機電抗及時間常數來決定。 這個測試結果要被用來推導 q 軸的暫態、次暫態阻抗和時間常數[16]。 q 軸參數測試在打開機組主斷路器前,發電機的實際運行狀況如下: . 有效功率輸出. 58.98 MW. . 無效功率輸出. -3.10 MVAr(欠勵). . 發電機端電壓. 16.63 kV. . 勵磁機運作. 手動. 圖 4-11 為 台 電 明 潭 廠 水 輪 機 q 軸 參 數 測試 之 端 電 壓 , 圖 4-12 為 自 製 Matlab/SimuLink 水輪機模型 q 軸參數測試之端電壓。 量測電壓 舊有模型 更新模型. 圖 4-11 台電明潭廠水輪機 q 軸參數測試之端電壓 53.
(64) 1.1. 1.05. Vt(pu). 1. 0.95. 0.9. 0.85. 0.8 140. 160. 180. 200. 220 Time(Sec). 240. 260. 280. 300. 圖 4-12 自製 Matlab/SimuLink 水輪機模型 q 軸參數測試之端電壓. 因同樣在勵磁機穩定後,加入控制使勵磁機維持在穩定值而不再變化,使勵 磁機成手動狀態,微量的虛功加上大量的實功,在 150 秒後斷路器啟動後,渦輪 機動能無法輸出使轉速上升至定值,端電壓因微量虛功使值微量下降,之後端電 壓因渦輪機回穩後稍微回升至某值後穩定。 而為何要輸入微量虛功的原因在於安全,假設完全不給虛功的話,實功會導 致轉速急速上升,因而可能破壞絕緣,所以微量虛功可使端電壓先行下降,之後 上升後的值還是維持在 1.01pu 以下。 圖 4-11 為台電測試模擬圖形包含量測電壓曲線、舊有模型曲線、更新模型 曲線,這邊我們要比對的是更新後的曲線圖,與圖 4-12 自製模型比對後,雖斷 路器啟動後先降後升與台電擬模擬不同,但最後收斂值是符合模擬結果。. 54.
(65) 4.3.3 無效功率電流補償(電壓低垂,線路壓降補償)測試 線路壓降補償通常用來補償機組升壓變壓器的部分阻抗並且調節發電機機 端之外的某點的電壓。該補償也用於單一發電機經長輸電線接至系統或幾個並聯 發電機共用一台升壓變壓器的系統情形以解決無效功率在機組間的分配衝突 [16]。 無效功率電流補償(電壓低垂,線路壓降補償)測試通過無效功率卸載來進行。 發電機主要帶無效功率,電壓調整器設置在自動方式。本測試在打開機組主斷路 器前,發電機的實際運行狀況如下: . 有效功率輸出. 0.55 MW. . 無效功率輸出. -57.49 MVAr(欠勵). . 發電機端電壓. 16.21 kV. . 勵磁機運作. 自動. 圖 4-13 為台電明潭廠水輪機無效功率電流補償測試之端電壓,圖 4-14 為自製 Matlab/SimuLink 水輪機模型無效功率電流補償測試之端電壓。. 量測電壓 舊有模型 更新模型. 圖 4-13 台電明潭廠水輪機無效功率電流補償測試之端電壓 55.
(66) 1.15 1.1 1.05. Vt(pu). 1 0.95 0.9 0.85 0.8 0.75 0.7 145. 150. 155. 160. Time(Sec). 圖 4-14 自製 Matlab/SimuLink 水輪機模型無效功率電流補償測試之端電壓. 因無效功率電流補償測試中沒有加入控制使勵磁機成定值,勵磁機在自動控 制下,大量虛功雖然使端電壓急速下降,但隨後勵磁機運轉回升補正,端電壓最 後穩定並接近原本數值。 圖 4-13 為台電測試模擬圖形包含量測電壓曲線、舊有模型曲線、更新模型 曲線,這邊我們要比對的是更新後的曲線圖,與圖 4-14 自製模型比對後,自製 模型中斷路器設定於 150 秒起動,雖然補正時經多段震盪回朔,端電壓下降值量 多於模擬,而收斂時間約 5 秒不盡理想於模擬值,可是最後回升值誤差於 0.01pu 內符合模擬。. 56.
(67) 4.3.4 部分負載卸載試驗 部分負載卸載試驗用於驗證發電機組的慣性時間常數以及部分調速機模型 參數。在發電機帶部分負載,打開機組主斷路器後,發電機轉速的變化被用來驗 證機組的慣量及調速機的響應。由於前述 q 軸參數試驗可以完全滿足上述要求。 q 軸參數試驗的結果也可以被用來驗證發電機組的慣性時間常數以及調速機的 模型參數[16]。但是,本節描述的卸載試驗是與 q 軸參數試驗類似的另一個試驗。 發電機主要帶有效功率,電壓調節器設置在自動方式。本測試在打開機組主斷路 器前,發電機的實際運行狀況如下: . 有效功率輸出. 60.1 MW. . 無效功率輸出. -5.69MVAr(欠勵). . 發電機端電壓. 16.63 kV. . 勵磁機運作. 自動. 圖 4-15 為台電明潭廠水輪機部分負載卸載試驗之轉速,圖 4-16 為自製 Matlab/SimuLink 水輪機模型部分負載卸載試驗之轉速。. 量測頻率 舊有模型 更新模型. 圖 4-15 台電明潭廠水輪機部分負載卸載試驗之轉速 57.
(68) 63. 62.4. 61.2. (60Hz). 發電機頻率. 61.8. 60.6. 60. 59.4. 100. 105. 115. 120. 125. 130. Time(Sec). 圖 4-16 自製 Matlab/SimuLink 水輪機模型部分負載卸載試驗之轉速. 在轉速部分因導入大量實功,所以轉速在動能沒有輸出的情況下越轉越快, 但是渦輪機在調速機的控制下轉速收斂,最後穩定於原本轉速。 圖 4-15 為台電測試模擬圖形包含量測電壓曲線、舊有模型曲線、更新模型曲線, 這邊我們要比對的是更新後的曲線圖,與圖 4-16 自製模型比對後,Y 軸為發電 機頻率,在斷路器設定於 100 秒啟動後,轉速的爬升與最後收斂值都相當接近於 模擬值。. 58.
(69) 第五章 結論與未來展望 5.1 結論 電力系統穩定在經自然災害影響下,如果沒有快速且正確的修正回定值,將 會對各種電器、電子設備產生巨大的影響及損壞,經由使用適當的模型參數將可 對電力系統模擬動態特性現象有進一步確認,進而改善電力品質。本論文利用 Matlab/SimuLink 自製模型將實測資料帶入模擬系統進行估測,而也以台電現有 模型帶入實測資料進行估測,並以兩種發電機組實測資料,利用 d 軸參數測試、 q 軸參數測試、無效功率電流補償測試與部分負載卸載試驗資料,對發電機參數 進行驗證分析,成功的驗證了正確的參數值。 由第四章節對 Matlab/SimuLink 自製模型模擬結果分析討論後做出以下幾點 可以參考的結論: (1).火力汽渦輪機 d 軸參數測試、q 軸參數測試、無效功率電流補償測試與部分 負載卸載試驗,大致同於台電測試資料可信度高。 (2).水輪機實驗中有些微誤差,推斷於實驗中所使用的勵磁機不同,但模擬後的 回穩數值及響應時間卻也近於理想。 (3).發電機測試模組為自己架構,MATLAB 與 PSSE 運算式不同,導致產生誤差, 但曲線圖近似於 PSSE 模擬出來的結果,進而推斷使用 MATLAB 模擬之可行 性。. 59.
(70) 5.2 未來展望 本論文著重於 3 階測試發電機的架構以及火力及水力渦輪機模組架構和勵 磁機模組架構進行參數估測動作,希望未來能開發出屬於台灣自己的模擬軟體, 而 Matlab 就是一套可信度極高、變化性極大的工具,將來也將以此模擬加上介 面開發專屬的嵌入式系統,再利用網路的功能傳送到雲端達到線上即時估測系統, 統合成台灣自己的自動模擬驗證平台。. 60.
(71) 參考文獻 [1] J.-Z.Yang, J.-C.Chiang,C.-J.Liao,C.-T.Hu, F.-C. Chou,‘‘The Study of Generator Parameters Estimation and ValidationPart I: the Relationship between Tests and Model Parameters”中華民國第三十二屆電力工程研討會台灣新北市 2011 年。 [2] IEEE Std. 421.2-1896, IEEE Standard Definitions for Excition System for Synchronous Machines. [3] Kosterev, Dmitry N.; Taylor, C.W. ; Mittelstadt, W.A. "Guidelines for Generator Stability Model Validation Testing" IEEE 24-28 June 2007. [4] F. P. de Mello and J. R. Ribeiro, "Derivation of Synchronous Machine Parameters from Tests", IEEE Trans. on Power Apparatus and Systems, vol. 96, no. 4, pp. 1211-1218, July/August 1977. [5] G. Shackshaft, "New Approach to the Determination of Synchronous Machine Parameters from Tests". Proc. IEE (London), 1974, 121(11), pp. 1385-1392. [6]de Mello, F.P., Ribeiro, J.R.“Derivation of synchronous machine parameters from tests” IEEE July 1977 [7] L. N. Hannett and J. W. Feltes, "Testing and Model Validation for Combined-Cycle Power Plants," in Proc. 2001 IEEE Power Engineering Society Winter Meeting Conf., pp. 664-670, vol. II. [8] G. R. Bérubé and L. M. Hajagos, "Testing and Modeling of Generator Controls" presented at SERC Generator Testing Workshop, Atlanta, GA, December 2000. [9]楊創方, “Excitation System Model Parameters Validation Based on PSSE”, 義守大學碩士論文, 民國 102 年 6 月. [10] IEEE Std 421.2-1990, IEEE Guide for Identification, Testing, and Evaluation of the Dynamic Performance of Excitation Control Systems. [11] 李基成“現代同發步機勵磁系統設計及應用”,中國電力出版社,民國九十八 61.
(72) 年七月,ISBN957-493-671-6 [12]邵明凱,”火力無刷式發電機勵磁系統模型建立及動態響應模擬之研究”民 國九十七年六月. [13]IEEE. Std. 421.5-1992. IEEE Recommended Practice for Excitation System Models for Power System Stability Studies. IEEE. [14] Harold F. Weaverhttp://zh.wikipedia.org/wiki/汽輪機 [15]台電綜研所,”大林電廠四號發電機組測試及模型參數驗證報告”,中華民 國九十八年十二月十四日 [16]台電綜研所,”明潭電廠三號機組參數驗證分析報告”,中華民國一百年九 月十五日. 62.
(73)
數據
+7
Outline
相關文件
A1: 資訊系統的操作對於我們來說友善程度沒有那麼高,雖然它每年持 續的在改進啦,其實大家都知道 TIMS 非常的難用,從以前就通道說 TIMS
Rapiacta 因不經肝代謝,故透過 CYP 機轉與其他藥物發生 交互作用之可能性應該很低,就目前所知的排除途徑以及從 體外試驗可推知 Rapiacta 並不會誘導或抑制 CYP 450。 1)
根據國民健康署統計資料顯示,食道癌 發生率在台灣地區每年約有 2000 多名新 病例發生,於 2017
數位計算機可用作回授控制系統中的補償器或控制
在舉辦這次座談會之前,其實有先邀請大家填寫問卷。彙整問卷結果以及會 議裡提出的意見後,我們發現有許多地方是有衝突的,好比說課程太難
隨著科技的進步,展覽場的導覽系統已從過去導遊、磁帶機或 CD 播放 器講解的時代轉換成行動導覽的時代。目前行動導覽方式大都以 RFID 或 QR
在文獻中,出現的極早,尤其是以北斗代表北方,來和青龍白虎相配,可能在六
法國農業四個機構跨業合作研發成功的 Pl@ntNet App, 目 前已經可以辨識八百多種歐洲植物,中長期目標希望
