國
立
交
通
大
學
電控工程研究所
碩
士
論
文
以 FPGA 實現直流無刷馬達無位置感測控制
FPGA-Based Implementation of BDCM Sensorless Control
研 究 生:鄭 庠 澤
指 導 教 授:陳 鴻 祺 博士
以 FPGA 實現直流無刷馬達無位置感測控制
FPGA-Based Implementation of BDCM Sensorless Control
研 究 生:鄭庠澤 Student:Hsiang-Tse Cheng
指導教授:陳鴻祺 Advisor:Hung-Chi Chen
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A ThesisSubmitted to Institute of Electrical and Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical and Control Engineering
Dec. 2009
Hsinchu, Taiwan, Republic of China 中華民國九十八年十二月
以 FPGA 實現直流無刷馬達無位置感測控制
研究生:鄭庠澤
指導教授:陳鴻祺 博士
國立交通大學電控工程研究所
摘要
直流無刷馬達具有高可靠度、高效率及可控制性等優點,已被廣泛應用於各種場合。 然而,直流無刷馬達需使用霍爾元件來偵測轉子與定子間的相對位置。霍爾元件在使用 上通常有幾點限制:感測器必須擺放精準才能正確得到轉子位置、易受雜訊干擾且不耐 高溫。因此,沒有使用霍爾元件的無感測控制技術則可以改善上述缺點。本論文以現場可規劃邏輯閘陣列(Field Programmable Gate Array, FPGA)實現應用於 直流無刷馬達無位置感測控制晶片,其電路實現方式以階層式、模組化設計,降低其複 雜度。以並行電路的概念,降低邏輯閘使用數量,達到最佳化目的。直流無刷馬達無位 置感測策略為以 120 度方波脈波寬度調變為驅動;以反應電動勢偵測電路偵測應電勢之 零交會點為基礎。利用零交會點來得到準確的開關換相點,進而達到驅動與控制的目的。 最後利用模擬與實作結果來驗證所提無位置感測控制策略。
FPGA-Based Implementation of BDCM Sensorless Control
Student:Hsiang-Tse Cheng Advisor:Hung-Chi Chen
Institute of Electrical and Control Engineering
National Chiao Tung University
Abstract
Brushless DC motors (BDCMs) with high reliability, high efficiency and good controllability are extensively used. However, the BDCMs must use Hall sensors to detect the relative position of the rotor and the stator. It leads to the limitation that the Hall sensors must be mounted properly in the motor in order to acquire the exact rotor position, ease of interference with noise and temperature failure. The BDCM sensorless control schemes can overcome the limitations.
This thesis presents the design and implementation of FPGA-based sensorless control for BDCMs. By using the hierarchical and modular realization strategy, the designed parallel circuit can reduce the design complexity and the total gate counts for optimum design. The proposed BDCM sensorless control fed by 120-degree square-wave-pulse-width-modulation (SWPWM) approach obtains the zero crossing points by the back-EMF detecting circuit. In addition, accurate commutation instants can be obtained by those zero crossing points. Simulation and experimental results have been carried out to verify the proposed control scheme.
誌謝
首先要感謝指導教授陳鴻祺博士,在撰寫本論文的過程中,給予細心指導,使本論 文能順利完成。透過以解決問題為基礎的教學方式,除了專業知識上的精進之外,也讓 我更加瞭解自己不足的地方。在解決問題的過程中,積極的態度以及如何簡化問題的思 考方式,更是這兩年多來我所得到的最大收穫。在此對老師獻上由衷的感謝。除此之外, 感謝口試委員廖聰明教授及張鈺炯博士,給予本論文之批評指教並提供寶貴的意見,使 得本論文得以更加完整。 這兩年多的研究生活中,在交大認識了許多好朋友,實驗室成員彼此間的情誼是支 持我的力量之ㄧ。感謝我的學姊如璇、學長子揚和奕謙,教導我許多專業知識,使我獲 益良多。感謝同學們任浩、志杰、暐舜和育慶,在兩年多的時間裡一起學習一起成長, 沒有你們的日子會是寂寞的。感謝學弟們振宇、崇賢、子安、智豪、威諭和宏和,讓我 在最後的研究生活裡還是充滿樂趣。 感謝我最親愛的爸媽及妹妹,在這段時間的關懷及付出,讓我可以無後顧之憂的完 成學業。另外,感謝伊婕這些日子以來的陪伴與支持。最後再次謝謝週遭關心我的朋友 們,願將這份喜悅與你們一起分享。目錄
中文摘要 ... i 英文摘要 ...ii 誌謝 ...iii 目錄 ... iv 圖目錄 ... vi 表目錄 ...viii 第一章 緒論 ... 1 1.1 研究背景與發展現況 ... 1 1.2 文獻回顧 ... 2 1.3 研究目的 ... 3 1.4 本文架構 ... 3 第二章 直流無刷馬達控制原理 ... 4 2.1 直流無刷馬達簡介 ... 4 2.2 直流無刷馬達數學模型 ... 5 2.3 直流無刷馬達驅動原理 ... 7 2.3.1 120 度六步方波驅動 ... 9 2.3.2 馬達換相時機 ... 10 2.4 脈波寬度調變原理 ... 12 2.5 120 度方波脈波寬度調變(SWPWM) ... 13 2.6 直流無刷馬達有位置感測控制 ... 17 第三章 直流無刷馬達無位置感測控制策略 ... 19 3.1 無感測控制架構 ... 19 3.2 無感測控制啟動 ... 21 3.3 反應電動勢偵測電路 ... 23 3.4 飛輪二極體效應 ... 26 3.5 無感測控制模擬 ... 27 3.5.1 穩態模擬 ... 293.5.2 換相時間命令變化暫態模擬 ... 32 3.5.3 負載切換暫態模擬 ... 32 第四章 晶片功能模組設計 ... 33 4.1 現場可規劃邏輯閘陣列(FPGA)介紹 ... 33 4.2 無感測驅動各功能模組規劃 ... 35 4.2.1 開關控制模組 ... 36 4.2.2 啟動模組 ... 37 4.2.3 無感測換相模組 ... 39 4.2.4 區間選擇模組 ... 42 4.2.5 開關訊號產生模組 ... 43 4.2.6 脈波寬度調變模組 ... 45 4.2.7 換相時間估算模組 ... 46 4.2.8 PI 控制器模組... 47 第五章 實作電路與結果 ... 49 5.1 現場可規劃邏輯閘陣列(FPGA) ... 49 5.2 實作電路 ... 50 5.2.1 開關驅動電路 ... 52 5.2.2 數位類比轉換電路(DAC) ... 52 5.3 穩態實作波形 ... 53 5.4 換相時間命令變化實作波形 ... 56 5.5 負載切換實作波形 ... 57 第六章 結論 ... 58 參考文獻 ... 59
圖目錄
圖 2.1 直流無刷馬達工作原理 ... 4 圖 2.2 直流無刷馬達等效電路模型 ... 6 圖 2.3 (a)120 度;與(b) 180 度方波驅動開關導通順序圖 ... 8 圖 2.4 (a)理想上 120 度方波驅動下馬達端電壓波形;... 10 (b)實際上 120 度方波驅動下馬達端電壓波形 ... 10 圖 2.5 (a)同步反應電動勢與相電流波形;(b)不同步反應電動勢與相電流波形 ... 10 圖 2.6 理想開關操作 ... 11 圖 2.7 PWM 之基本原理... 12 圖 2.8 後半 60 度 PWM 導通模式... 13 圖 2.9 開關組合 2 之等效電路 ... 14 圖 2.10 120 度方波脈波寬度調變驅動之馬達三相端電壓波形 ... 15 圖 2.11 有感測直流無刷馬達控制:(a)架構 1;(b)架構 2 ... 18 圖 3.1 無位置感測直流無刷馬達控制圖 ... 19 圖 3.2 啟動流程圖 ... 21 圖 3.3 無感測控制啟動波形示意圖 ... 22 圖 3.4 反應電動勢偵測電路圖 ... 24 圖 3.5 位置訊號波形示意圖 ... 25 圖 3.6 具飛輪二極體效應之端電壓v 與位置訊號... 26 a 圖 3.7 無位置感測控制之模擬電路圖 ... 27 圖 3.8 各命令下之模擬波形(Rg 04 ):(a) T ms H 5 * (1000rpm);... 30 (b) T ms H 2.5 * (2000rpm);(c) T ms H 1.666 * (3000rpm) ... 30 圖 3.9 各命令下之模擬波形(Rg 001 ):(a) T ms H 5 * (1000rpm); ... 31 (b) T ms H 2.5 * (2000rpm);(c) T ms H 1.666 * (3000rpm) ... 31 圖 3.10 換相時間命令從 5ms (1000rpm)切換至 1.666ms (3000rpm)暫態模擬波形 ... 32 圖 3.11 負載切換暫態模擬波形 ... 32 圖 4.1. FPGA 元件基本結構 ... 34 圖 4.2 無感測驅動晶片系統架構 ... 35 圖 4.3 開關控制模組方塊圖 ... 36圖 4.4 啟動模組方塊圖 ... 37 .圖 4.5 無感測換相模組方塊圖 ... 39 圖 4.6 零交會點偵測架構圖 ... 40 圖 4.7 換相點產生架構圖 ... 41 圖 4.8 無感測換相模組內部訊號波形示意圖 ... 41 圖 4.9 區間選擇模組架構圖 ... 42 圖 4.10 開關訊號產生模組方塊圖 ... 43 圖 4.11 脈波寬度調變模組架構圖 ... 45 圖 4.12 轉速估算模組架構圖 ... 46 圖 4.13 PI 控制模組架構圖... 47 圖 4.14 限制器架構圖 ... 48 圖 5.1 實作電路組成 ... 50 圖 5.2 實作電路照片 ... 51 圖 5.3 開關驅動電路 ... 52 圖 5.4 D/A 轉換電路 ... 52 圖 5.5 FPGA 內部訊號波形圖 ... 53 圖 5.6 各命令下之穩態波形(Rg 001 ):(a) 5ms (1000rpm);(b) 2.5ms (2000rpm); (c) 1.66ms (3000rpm) ... 54 圖 5.7 各命令下之穩態波形(Rg 40):(a) 5ms (1000rpm);(b) 2.5ms (2000rpm); (c) 1.66ms (3000rpm) ... 55 圖 5.8 換相時間命令變化實作波形(Rg 100) ... 56 圖 5.8 負載切換暫態實作波形 ... 57
表目錄
表 2.1 各開關組合之各端電壓表示式 ... 9 表 2.2 各開關組合之各端電壓表示式 ... 16 表 3.1 驅動端馬達參數 ... 28 表 3.2 發電機端馬達參數 ... 28 表 3.3 反應電動勢偵測電路元件參數 ... 28 表 4.1 開關控制模組各訊號定義 ... 36 表 4.2 啟動模組各訊號定義 ... 37 表 4.3 同步加速表 ... 38 表 4.4 無感測換相模組各訊號定義 ... 40 表 4.5 區間選擇模組各訊號定義 ... 42 表 4.6 開關訊號產生模組各訊號定義 ... 43 表 4.7 區間訊號與六開關訊號對應表 ... 44 表 4.8 開關訊號產生模組各訊號定義 ... 45 表 4.9 轉速估算模組各訊號定義 ... 46 表 4.10 PI 控制器模組各訊號定義... 48 表 5.1 FPGA 使用率 ... 49第一章
緒論
1.1 研究背景與發展現況
隨著工業的快速發展,馬達廣泛的被應用於產業自動化與電腦相關產品。直流馬達 的優點是控制容易,只要改變電樞電壓就可達到變速的目的,且從零轉速到額定轉速, 馬達的轉矩都可維持定值,最早為工業界運用於各類機械負載驅動器。然而,傳統直流 有刷馬達的電樞位於轉子,必須使用換向片與定子的碳刷接觸,當馬達旋轉時,兩者摩 擦容易產生火花,使得傳統直流有刷馬達不適用於多塵、易爆的特殊場合。而且碳刷必 須經常維護,降低了直流有刷馬達的可靠度。為了能夠有效解決因直流有刷馬達碳刷與 換向片維護以及所產生之摩擦火花、電器雜訊等問題,直流無刷馬達以電子式換相取代 碳刷與換向片。因此直流無刷馬達由於構造簡單、堅固、體積小和免維護等優點,亦擁 有相當於直流有刷馬達的性能,更因為轉子為磁性材料、轉動慣量小、不需激磁電流, 可減少轉子功率損失,提昇運轉效能,目前已被廣泛應用在精密機械、電腦週邊及消費 性電子產品等裝置中。 在工業運用上,直流無刷馬達驅動大多使用如霍爾感測元件、光編碼器等位置感測 器來偵測轉子的位置,並且即時計算馬達轉速,以達到馬達速度控制的功能。然而使用 位置感測器的缺點為:光編碼器會額外增加馬達體積且價格昂貴,霍爾元件容易受干擾 且在高溫環境下易受損。除了感測器自身的缺點外,感測器訊號會直接影響驅動器對馬 達換相控制的精準度,進而影響對閉迴路位置與速度控制。若只是提高感測器解析度, 會讓生產成本更加昂貴。如何將感測器精準的擺放在馬達上也是影響整體性能的因素之 ㄧ。有鑑於此,考慮到馬達應用場合、體積縮小與節省成本,若能夠不需使用位置感測 器來達到相同的驅動目的,會更加符合經濟效益,故有無位置感測器控制策略的提出。1.2 文獻回顧
近年來,在六開關電壓源反流器(Voltage Source Inverter, VSI)中常使用方波調變 (Square Wave Modulation, SWM)來產生需要的輸出電壓[1]。方波調變可分為 6 步方波及
12 步方波,前者包含常見的120方波調變[2]-[9]及180方波調變[11]-[12],後者包含150
方波調變[13]-[16]。每一方波調變開關訊號在任意兩個換相間可能保持連續的導通或是 截止,並提供了固定大小的基本波成分[5], [12]-[14]。因此,方波調變常被使用於主軸 馬達[5], [14]及風扇馬達[13]等固定轉速之應用上。
在變速應用中,變壓變頻(Variable Voltage and Variable Frequency, VVVF)是必需 的。有兩種方波調變策略可以達成變壓變頻功能,其中一種方法稱為脈波高度調變(Pulse Amplitude Modulation, PAM)但需要增加額外電路來調整六開關反流器的直流鏈電壓。另 一種方法是將方波調變與脈波寬度調變(Pulse Width Modulation, PWM)綜合起來成為方 波脈波寬度調變(Square Wave Pulse Width Modulation, SWPWM)來形成可控制的輸出電
壓。後者經常被使用並且可以分為120方波脈波寬度調變[3]-[4], [6]-[9]、180方波脈波 寬度調變[11]及150方波脈波寬度調變[15]-[16]。 過去數十年來,很多直流無刷馬達無感測控制方法被提出且可分為好幾個種類 [17],如:利用馬達的端電壓與中性點電位做比較[18],可取得反應電動勢零交會點, 未激磁相截止到下次導通的中間點。取得零交越點後,經過一個相位延遲電路,去控制 反流器開關之切換順序,即可完成無感測驅動之目的。以及使用反電勢積分法來進行無 刷馬達無感測器驅動[19],由未激磁相之零交越點開始對反應電動勢之絕對值進行積 分,預設一個門檻電壓,當到達該值時,則反流器開始進行換相動作,以此達到馬達驅 動之目的。還有經由檢測反應電動勢之三次諧波成份[20],來做為無感測驅動器中反流 器開關切換之依據。此法是將馬達三相的端電壓相加,由於馬達為三相平衡系統,所以 三相端電壓基本波之和為零,因此三相端電壓之和為三次諧波與高次諧波所組成,此電 壓再經由低通濾波器將其高次諧波成份濾除,取得三次諧波成份,再對其以時間積分, 可得轉子磁通三次諧波等效值,而轉子磁通三次諧波之零交越點即可做為反流器開關切 換時間。
1.3 研究目的
從降低驅動器的複雜度、生產成本以及操作環境等方面做考量,均必須捨棄轉子位 置感測器。有鑑於此,本論文將針對直流無刷馬達配合方波脈寬調變驅動並對其反應電 動勢進行偵測,經適當訊號處理後完成無位置感測控制之目標。以往馬達控制系統中, 大多以數位訊號處理(DSP)作為控制器核心[5]-[7]。近幾年由於微電子技術的迅速發展, 馬達控制透過特殊應用積體電路(Application Specific Integrated Circuit, ASIC)、系統晶片 (System On Chip, SOC)或可程式邏輯元件(CPLD/ FPGA)[14], [23],使得控制器可依系統 的應用需求作特殊規劃,提昇整體效能。故本論文針對直流無刷馬達,發展出以 FPGA 為控制器核心並使用硬體描述語言(Verilog HDL)來設計,將系統各個功能做模組化實 現,最後與外部驅動電路結合,設計出一套以 FPGA 晶片為基礎之直流無刷馬達無位置 感測控制系統。本文使用 PSIM 進行模擬與設計,驗證實驗結果並做出分析與比較。
1.4 本文架構
本論文的內容一共分為五個章節,各章節之大綱內容概述如下: 第一章 :說明本論文的研究背景以及相關文獻回顧。 第二章 :介紹直流無刷馬達基本原理、馬達數學模型與驅動原理。 第三章 :介紹本文所使用之無感測控制架構,說明啟動原理、反應電動勢偵測方法。 最後再進行電腦模擬驗證。 第四章 :採用階層式、模組化的設計方式實現無感測速度回授控制 FPGA 電路。 第五章 :對實際電路做一簡介,並將實作之結果進行量測及討論。 第六章 :總結本論文之研究成果以及主要貢獻。 參考文獻。 附錄第二章
直流無刷馬達控制原理
2.1 直流無刷馬達簡介
直流無刷馬達內部的轉子為永久磁鐵,欲使轉子轉動必須要從外界的磁場變化著 手,利用定子繞組線圈,以輸入電流造成電磁場的改變。直流無刷馬達工作原理可經由 觀察弦波類型直流無刷馬達之操作來了解,一個二極三相直流無刷馬達如圖 2.1(a)所 示,其定子繞組呈 120 度分佈,由三相平衡電流控制換向器提供定子繞組電流如圖 2.1(b) 之t1與t2,結果定子磁場所在位置如圖 2.1(c)與 2.1(d)所示。藉由觀察定子磁場與轉子磁 場與電磁力作用的觀念可知:如要使馬達的輸出轉矩最大則必須使馬達轉子產生之磁通 量和輸入電流產生之電磁場保持垂直的位置,但因直流無刷馬達之轉子(磁極)位置是會 隨著時間週期變化,為了保持轉子之順序轉動及獲得最大轉矩,一般的作法是偵測永久 磁鐵轉子之磁極位置,然後由驅動電路提供相對應之輸入電流給線圈,使其磁動勢和轉 子磁極隨時保持垂直狀態,藉由此控制方法使得馬達不停運轉。 A A B C C B A A B C C B A A B C C B 1 t t2 圖 2.1 直流無刷馬達工作原理2.2 直流無刷馬達數學模型
假設三相繞組Y 接直流無刷馬達的各相線圈電阻與電感相等,其電壓方程式可表示 為[21] c b a c b a ss ss ss c b a s s s cn bn an e e e i i i dt d L M M M L M M M L i i i R R R v v v 0 0 0 0 0 0 (2.1) ) 3 2 sin( ) 3 2 sin( ) sin( e e e e r c b a K e e e (2.2) 其中參數定義為 cn bn an v v v 、 與 :三相電壓 s R :定子繞組各相電阻 c b a i i i、 與 :三相電流 ss L :定子繞組相間自感 M :定子繞組各相互感 c b a e e e、 與 :三相反應電動勢 r :馬達轉速 e K :反應電動勢常數 e :馬達轉子電氣角 各相線圈的自感與互感不會隨著轉子轉動而改變,可視為常數,再根據三相平衡電 流和為零之關係。 0 b c a i i i (2.3) 故 a c b Mi Mi Mi (2.4) (2.1)可改寫為 c b a c b a s s s c b a s s s cn bn an e e e i i i dt d L L L i i i R R R v v v 0 0 0 0 0 0 0 0 0 0 0 0 (2.5) 其中 M L Ls ss (2.6) 由(2.5)可知,直流無刷馬達每一相的等效電路模型為一個電阻、電感與一個代表反應電 動勢的電壓源所串聯構成,如圖 2.2 所示。 c
e
sL
sR
sL
sR
a e sL
sR
be
a b c a i bi
ci
n
圖 2.2 直流無刷馬達等效電路模型 而電磁轉矩可表示為 r c c b b a a e i e i e i e T ) ( (2.7) 將(2.2)代入(2.7)得 ) 3 2 sin( ) 3 2 sin( ) sin(e b e c e a e e K i i i T (2.8) 然而,電磁轉矩並不等於馬達的輸出轉矩,考慮負載以及馬達本身所消耗的轉矩,機械 方程式可表示為 dt d J B T Te L r r (2.9)其中參數定義為: e T :電磁力矩 L T :負載力矩 J:總慣量常數 B :總阻尼係數
2.3 直流無刷馬達驅動原理
三相直流無刷馬達最基本的驅動方法,分為方波驅動與正弦波驅動。前者將六 個開關以單純方波開關訊號驅動馬達運轉,後者驅動方式如同一般的交流馬達,在定子 端輸入三相正弦波訊號,合成一旋轉磁場帶動轉子旋轉,其馬達運轉情況如同永磁式交 流同步馬達,因本論文使用方波驅動馬達運轉,所以正弦波驅動方式不在此描述。 六步方波驅動方法分成二種,一種為120度方波驅動,另一種則是180度方波驅動, 兩種驅動方式的差異點在於開關導通的順序跟各開關導通的時間。如圖2.3(a)與2.3(b)所 示,圖中GT1~GT6為開關控制訊號,e為電氣角。120度導通模式順序為:(T6、T1) → (T1、T2) →(T2、T3)→(T3、T4) →(T4、T5) →(T5、T6)每一個開關之導通時間皆為120 度電氣角的時間,又每一個導通區間只有兩個開關導通。另外180度導通模式之開關順 序為(T5、T6、T1) →(T1、T2、T6) →(T1、T2、T3) →(T2、T3、T4) →(T3、T4、T5) →(T4、T5、T6),相較於120度導通模式,180度導通模式在每一個導通區間中有三個開 關導通,且導通時間為180度電氣角時間。但不管是120度導通或是180度導通,都是藉 由導通六個開關控制導通電流,在馬達內部產生六個方向的磁場,吸引轉子到達六個定 點,經由改變的開關順序,可使馬達旋轉。在實際運用上,因為180度方波驅動每次導 通開關較120度方波驅動多一個,其功率損失較大。且180度方波驅動還要避免上下臂同 時導通的情形發生。實際運用上大多採用120度方波驅動。綜合以上比較,本論文內馬 達驅動方式採用120度方波驅動。1 T G 2 T G 3 T G 4 T G 5 T G 6 T G 2 e Pattern 6 1 2 3 4 5 6 1 2 3 4 5 3 / e e e e e (a) 1 T G 2 T G 3 T G 4 T G 5 T G 6 T G 3 / 2 e e e e e e (b) 圖 2.3 (a)120 度;與(b) 180 度方波驅動開關導通順序圖
2.3.1 120 度六步方波驅動
120 度方波驅動是利用控制單元,產生六個控制訊號來驅動反流器上的開關元件, 其控制訊號如圖 2.3(a)所示。當馬達其中兩相導通時,一相為電流輸入端,一相為電流 輸出端,另一相則為開路。為了使馬達運轉時能夠達到最大的轉矩輸出,則必須推得正 確的電流導通方向切換,所以將馬達 360 度電氣角分為六個狀態,而每一相定子線圈接 連續導通 120 度電氣角後轉為開路,故此驅動方式稱為 120 度六步方波驅動。 120 度導通模式,其導通情形可分為六個區間,表 2.1 為各開關組合與端電壓關係 整理。 表 2.1 各開關組合之各端電壓表示式 開關組合 上臂 下臂 v a v b v c1
GT1 ON GT2 ON V d d eb V 2 3 2 02
GT3 ON GT2 ON d ea V 2 3 2 V d 03
GT3 ON GT4 ON 0 V d d ec V 2 3 2 4
GT5 ON GT4 ON 0 Vd eb 2 3 2 V d5
GT5 ON GT6 ON d ea V 2 3 2 0 V d6
GT1 ON GT6 ON V d 0 d ec V 2 3 2 圖 2.4(a)與 2.4(b)分別為 120 度方波驅動時,理想上與實際上的馬達端電壓。由於馬 達為電感性負載。當開關停止導通時,馬達線圈上的電流不會立刻停止,而是慢慢減少, 造成電流會改為流向開關上之飛輪二極體,此時飛輪二極體導通。若為上臂飛輪二極體 導通,馬達端電壓強制變為高電壓V ;若是下臂飛輪二極體導通時,馬達端電壓會強制d 接地變為零。a v 2 3 / b v c v e e e (a) a v 2 e 3 / b v c v e e (b) 圖 2.4 (a)理想上 120 度方波驅動下馬達端電壓波形; (b)實際上 120 度方波驅動下馬達端電壓波形
2.3.2 馬達換相時機
直流無刷馬達使用電子式換相取代電刷換相,但是此換相動作需得知轉子之動態位 置才可做正確的換相工作。上一小節所提直流無刷馬達 120 度方波驅動,會吸引轉子到 六個定點,需依序給予驅動訊號,馬達才能旋轉。但在驅動直流無刷馬達時,還需要考 慮使相電流與反應電動勢同相,效率才是最佳,如圖 2.5 所示。 e e 0 60 120 180 240 300 360 420 480 540 a i a e (a) a i a e e e 0 60 120 180 240 300 360 420 480 540 (b) 圖 2.5 (a)同步反應電動勢與相電流波形;(b)不同步反應電動勢與相電流波形為了正確驅動馬達,必須知道轉子位置。如圖 2.6 所示,對應著反應電動勢波形來 切換開關,才可做正確的換相動作,使得相電流與反應電動勢同步。 e e 0 60 120 180 240 300 360 420 480 540 GT1 GT3 GT5 GT1 GT6 GT2 GT4 GT6 GT2 e b e c e a i b i c i a e 圖 2.6 理想開關操作
2.4 脈波寬度調變原理
有關直流無刷馬達的驅動控制,是以高頻波加以轉換成實質之電流,再將其加以 類比控制。其最具代表性者為脈波寬度調變(PWM, Pulse Width Modulation)。脈波寬度 調變的實現主要是將一個三角波與一個控制命令做比較後輸出,其操作原理如圖 2.7 所 示。其中v 為三角波,tri vcontrol為控制命令,vPWM為 PWM 的輸出電壓,VDD為電壓源 電壓,Vavg為平均輸出電壓。當vcontrol較v 大時,使得tri vPWM 為高準位;當vcontrol較v 小tri
時,使得vPWM為低準位。 tri v control v PWM v DD V avg V on t toff s T S DD V RL tri V 圖 2.7 PWM 之基本原理 PWM 之基礎原理為將電壓變化成脈波狀,平均負載電壓為 DD s on DD off on on avg V T t V t t t V (2.10) 其中T 為三角波的週期,即 PWM 之週期。s t 為高位準輸出時間;on toff為低位準輸出時 間。PWM 訊號之責任週期(Duty cycle)定義為 s on T t D (2.11)
將(2.11)代入(2.10)可得 DD avg D V V (2.12) 依三角形相似定理可得 D T t V v s on tri control (2.13) 所以經由(2.12)與(2.13)可知,我們藉由改變控制命令準位可改變 PWM 的責任週期比值 D,達到調變輸出平均電壓的目的與實現脈波寬度調變的技術。
2.5 120 度方波脈波寬度調變(SWPWM)
120 度方波脈波寬度調變為 120 度方波驅動與脈波寬度調變之結合,其利用 120 方 波作為馬達驅動並配合脈波寬度調變調整馬達轉速。常用的 PWM 類型有四種,分別是 後半 60 度 PWM、
前半 60 度 PWM、上臂 PWM 以及下臂 PWM。本文採用後半 60 度 PWM,其開關訊號導通模式如圖 2.8 所示,每個開關在 120 度電氣角內方波連續導通 60 度後,在剩下的 60 度內轉為 PWM 模式即為後半 60 度 PWM。 1 T G 2 T G 3 T G 4 T G 5 T G 6 T G 3 / 2 e e e e e e 圖 2.8 後半 60 度 PWM 導通模式一個週期共有六個區間。因此在每個時刻都只有兩個開關元件處於導通狀態,觀察 其中ㄧ區間之電路行為便可大致了解其他區間之電路行為。 a e Z Z Z c e b e c b i i T2 T3 n v d b V v 0 c v a v 圖 2.9 開關組合 2 之等效電路 首先,假設如圖 2.9 所示之操作區間,T2 和 T3 導通,此時 GT2 為 PWM 形式,GT3 為 ON/OFF 形式。且導通電流由 B 相流入,C 相流出時,則中性點v 可表示為 n b b b n v i Z e v (2.14) c c c n v i Z e v (2.15) 其中 Z 為馬達等效阻抗,e 、b e 為馬達 B、C 相反應電動勢。因此(2.14)和(2.15)兩式相c 加,由於ib ic,得中性點v 為 n 2 ) ( b c c b n e e v v v (2.16) 此時 A 相無電流(或稱未激磁相),故其端電壓可表示為 a n a v e v (2.17) 整理(2.16)與(2.17),可獲得 A 相之端電壓v 表示式為 a a c b c b a e e e v v v 2 ) ( 2 (2.18) 若反應電動勢為理想弦波且互差 120 度,則eaebec 0,代入(2.18)得 a c b a e v v v 2 3 2 (2.19) 由於此區間內,T3 固定導通,故 B 相端電壓vb Vd,當 T2 PWM ON 時,端電壓v 接c
地為零;當 T2 PWM OFF 時,D5 二極體導通,故端電壓v =c V ,因此(2.19)可進一步化d 簡為 OFF PWM 2 T 2 3 ON PWM 2 T 2 3 2 , , a d a d a e V e V v (2.20) (2.20)為位於 GT2、GT3 的導通區間時,未激磁相之端電壓v 之表示式。同理,各開關a 區間之端電壓表示式可依相同程序推導其結果整理如表 2.2 所示。圖 2.10 為 120 度方波 脈波寬度調變驅動之馬達三相端電壓波形。 a v b v c v e e e 圖 2.10 120 度方波脈波寬度調變驅動之馬達三相端電壓波形
表 2.2 各開關組合之各端電壓表示式 開關組合 上臂 下臂 v a v b v c GT1 PWM ON V d d eb V 2 3 2 0
1
GT1 PWM OFF GT2 ON 0 eb 2 3 0 GT2 PWM ON Vd ea 2 3 2 V d 02
GT3 ON GT2 PWM OFF Vd ea 2 3 V d V d GT3 PWM ON 0 V d d ec V 2 3 2 3
GT3 PWM OFF GT4 ON 0 0 ec 2 3 GT4 PWM ON 0 Vd eb 2 3 2 V d4
GT5 ON GT4 PWM OFF V d Vd eb 2 3 V d GT5 PWM ON d ea V 2 3 2 0 V d5
GT5 PWM OFF GT6 ON a e 2 3 0 0 GT6 PWM ON V d 0 d ec V 2 3 2 6
GT1 ON GT6 PWM OFF V d V d Vd ec 2 3 2.6 直流無刷馬達有位置感測控制
有位置感測直流無刷馬達控制架構 1,如圖 2.11(a)所示。使用三個霍爾元件來偵測 馬達轉子位置,並藉由三個霍爾感測器訊號Ha、Hb、Hc達成有位置感測之馬達控制。霍 爾感測器訊號決定開關何時換相並且可用來產生換相點訊號 H。利用換相點訊號 H 可計 算出換相時間TH。六個TH週期時間對應 360 度電氣角時間。由(2.21)可知電氣角e、機 械角 與馬達極數 P 之關係,進而推導馬達轉速r 與換相時間r TH之關係式,如(2.22) 所示。 e r P 2 (2.21) ) ( 20 2 / 60 6 1 rpm T P P TH H r (2.22) 將轉速r與轉速命令 * r 比較後產生之誤差值,經 PI 控制器產生控制訊號vcont與三 角波訊號v 比較產生tri vPWM,進入開關訊號產生器且配合霍爾感測器訊號Ha、Hb、Hc 完 成開關換相,即可控制馬達轉速。 由(2.22)可知估測轉速為換相時間TH之倒數成份,表示此控制架構需要除法運算, 為了能精簡程式,所以不直接使用轉速命令與轉速做速度回授控制。改以直接使用換相 時間與換相時間命令來替代。有位置感測直流無刷馬達控制架構 2,如圖 2.11(b)所示。 轉速命令輸入後經查表對應一個換相時間命令 * H T 與換相時間TH比較後產生誤差值。要 注意的是換相時間TH此時為正端,最後同樣經 PI 控制器產生控制訊號vcont與三角波訊 號v 比較產生tri vPWM,進入開關訊號產生器且配合霍爾感測器訊號Ha、Hb、Hc 完成開關 換相,控制馬達轉速。a e b e c e Z a i b i c i d V a H Z Z b H c H TH H * r P 20 r
1 T 4 T 1 D 4 D 3 T 6 T 3 D 6 D 2 T 5 T 5 D 2 D 6 T G 5 T G 4 T G 3 T G 2 T G 1 T G tri v cont v PWM v H T a H b H c H H Comp. (a) H T TH H * r a e b e c e Z a i b i c i d V a H Z Z b H c H 1 T 4 T 1 D 4 D 3 T 6 T 3 D 6 D 2 T 5 T 5 D 2 D 6 T G 5 T G 4 T G 3 T G 2 T G 1 T G H T a H b H c H H tri v cont v PWM v Comp. (b) 圖 2.11 有感測直流無刷馬達控制:(a)架構 1;(b)架構 2第三章
直流無刷馬達無位置感測控制策略
3.1 無感測控制架構
無位置感測控制架構,如圖 3.1 所示,無感測控制策略乃是回授馬達端電壓 N P c b a v v V V v、 、 、 、 ,而馬達未激磁相之端電壓即為該相的反應電動勢。接著利用反應電動勢偵測電路(Back-EMF Detecting Circuit, BEDC)產生位置訊號Ha、Hb、Hc,最後使用
FPGA 處理這三個位置訊號來取得換相點(Commutation Point, H),經過處理後即能正確 估測馬達的轉子位置,並達到無位置感測馬達控制。 BEDC a e b e c e Z a i b i c i d V BDCM a v b v c v 1 T 2 T 3 T T5 4 T T6 5 D 2 D 3 D 1 D 6 D 4 D a e b e c e L T e T (Generator) g R Z Z Z Z Z g R Rg Ga i Gb i iGc n V p V 6 T G
Switching Signal Generator
5 T G 4 T G 3 T G 2 T G 1 T G H T SL H a H Hb Hc FPGA PWM Start Up Sensorless Commutation Signal Generator TH PI Select SU H SU D PI D H Commutation Period Counter Limiter Look Up Table * r BDCM 圖 3.1 無位置感測直流無刷馬達控制圖
此種利用回授馬達三相端電壓來取得反應電動勢之無感測控制策略主要的控制基 礎為: 1. 馬達無位置感測啟動,輸出啟動責任週期比DSU及啟動換相點HSU。 2. 利用反應電動勢偵測電路處理馬達回授端電壓。 3. 避開飛輪二極體導通所引起的誤偵測效應。 4. 從反應電動勢中擷取零交會點成份。 5. 利用所得之零交會點得到無感測換相點HSL與換相時間TH。 其中飛輪二極體效應和反應電動勢零交會點為馬達三相端電壓之物理現象。但是換 相點必需經由數學計算,也就是記錄兩兩零交會點之時間差值,即可得下一次換相延遲 時間。如果馬達轉速加快,零交會點將更早發生,延遲時間必須減小以使得反應電動勢 和相繞組的電流同方向。所以,這種無感測控制就是一直以相同的順序處理二極體時 間、零交會點、換相點。馬達定位啓動後,根據連續檢測到一定次數的零交會點後即進 入無感測開迴路模式。最後就能夠進入完整的閉迴路速度回授控制。 最後根據所提無感測控制策略來研擬之無感測控制架構。利用無感測啟動原理讓馬 達從靜止狀態順利運轉,此時馬達換相乃是根據啟動換相訊號HSU做切換。同時回授馬 達三端電壓v 、a v 、b v 以及直流鏈電壓c V 、p V 到反應電動勢偵測電路,產生位置訊號n c b a H H H、 、 。再將位置訊號經由數位控制器找出零交會點,產生無感測換相點HSL與 120 度方波脈波寬度調變結合,產生開關信號 GT1~GT6。並且利用回授實際換相時間TH 與由轉速命令 * r 查表所得換相時間命令 * H T 做比較,經 PI 控制器產生開關信號 PWM 所 需之責任週期比DPI ,完成整個無感測閉迴路控制。 實作部份,將兩相同馬達對接,分別稱為馬達側及發電機側,並於發電機端接上三 Y 接相同負載電阻R ,發電機側經馬達側帶動,產生三相電動勢g e 、a e 、b e 及三相負c 載電流iGa、iGb、iGc。
3.2 無感測控制啟動
馬達靜止時沒有反應電動勢感應於定子繞組,故首先必須了解無位置感測之啟動原 理。在馬達啟動前,需要先配合馬達之轉動慣量及負載,適當的設定一些參數,使馬達 由對位啟動至正確換相運轉均能順利完成。直流無刷馬達啟動如常見的同步馬達,其速 度藉由適當的頻率增加而逐漸上升,直到反應電動勢大到足夠去估測零交會點,開關訊 號轉至啟動模式。在啟動模式下同步開關訊號須小心地設計以避免電壓變動過大。 圖 3.2 表示啟動原理的流程,沒有使用感測器的馬達,其轉子初始位置是未知的。 為了能夠讓馬達順利旋轉,馬達在接收到啟動命令後會立即開始進行馬達轉子對位。所 謂的對位是藉由送出固定激磁,使馬達在啟動時可以瞬間吸引轉子至平衡位置。當轉子 就定位後,即可依照開迴路開關導通順序進行換相,使馬達順利啟動。 圖 3.2 啟動流程圖 馬達在低轉速時,反應電動勢較小。當反應電動勢過小時,零交會點的偵測容易受 到雜訊的干擾而造成換相點判斷錯誤,使得馬達無法順利運轉。因此藉由同步加速程 序,在未獲得夠大之反應電動勢前,依序循環改變導通之開關組合,開關組合開始如表2.1 之開關組合由 1、2、3、…、6 順序變化,過程中我們令 PWM 責任週期比及開關導 通時間同步作線性變化。隨著開關組合導通時間縮短及 PWM 責任週期比變大,此時馬 達轉速逐漸變快,反應電動勢也漸趨明顯。當開關組合導通時間與責任週期比匹配,馬 達的反應電動勢與相電流為同相。如此才能對應著反應電動勢波形來切換開關,做出正 確的換相動作。 在同步加速的過程中開始檢測反應電動勢的零交會點,當能夠連續正確檢測到超過 三個以上的反應電動勢零交會點,表示啟動完成。接著進入到無感測開迴路模式,這時 開關換相頻率與 PWM 責任週期保持固定,亦即馬達轉速固定。如馬達能順利保持運轉, 在無感測開迴路運轉一段時間後,加入速度回授控制完成無感測閉迴路控制。假如在同 步加速結束前還沒完成零交會點同步檢測,馬達會自動停止運轉。圖 3.3 為無感測控制 啟動波形示意圖。 a v a H P v b H c H a v Pattern ZCP 1 2 3 H 5 6 1 2 3 4 5 6 1 2 3 4 SL H SU H 圖 3.3 無感測控制啟動波形示意圖
3.3 反應電動勢偵測電路
反應電動勢檢測常利用於 120 度方波驅動,就此法而言,當各端電壓從正電壓切換 至負電壓時,有 60 度未激磁相時間,此時該端電壓會夾雜反應電動勢成份。因而可利 用此一現象,為從反流器輸出三相馬達端電壓波形著手,將不必要之波形成份與雜訊加 以去除,可經由濾波器取出訊號。接著經類比與數位之訊號處理,可取出轉子位置資訊。 從表 2.2 可知,當 PWM 狀態為 ON 時,未激磁相端電壓可表示為 x d x V e v 0.5 1.5 (3.1) x可為a、b、c。這表示將端電壓V 與一半的直流鏈電壓x 0.5Vd做比較,即可偵測反應電 動勢之零交會點。圖 3.4 為反應電動勢偵測電路圖,有四個低通濾波網路以及所有端電 壓va、vb、vc、Vp、Vn。濾波器信號va、vb、vc以及vP是從端電壓而來,且可表示為 P Vpn R R R R R R sC R R R R s v 2 1 3 2 1 3 2 1 3 2 ) ( 1 ) ( (3.2) x Vxn R R R sCR R R R s v 2 1 2 1 2 1 2 1 ) ( (3.3) 然後利用三端電壓va、vb、vc經電路濾波後產生v、a vb、 vc,在與直流鏈電壓V 經電路產p 生之v 信號比較得到位置訊號p Ha、Hb、Hc。注意無感測電路的低通濾波器並不會減弱 PWM 部分的電壓,但會過濾雜訊。因此低通濾波器的截止頻率必須遠大於 PWM 頻率 PWM f 。 fPWM R R R sC R R R 2 1 3 2 1 3 ) ( (3.4) PWM f R sCR R R 2 1 2 1 (3.5) 由 3.1 式可知未激磁相端電壓包含0.5Vp以及感應電動勢,為了使端電壓與0.5Vp能做比 較,必須滿足下列公式:3 1 2 2 1 2 2 1 3 2 2 R R R R R R R R R R (3.6) P v c v b v a v C C C C a v b v c v P V 3 R 2 R 2 R c b a H H H n V 1 R Low-Pass filter n V n V n V 1 R 1 R 1 R 2 R 2 R 圖 3.4 反應電動勢偵測電路圖 位置訊號波形示意圖,如圖 3.5 所示。其中 ZCP 為零交會點, H 為換相點訊號。觀 察每一未激磁相區間,可發現在最新一次換相後,位置訊號會保持固定直到未激磁相之 零交會點出現。如果我們能夠精確的擷取位置訊號在未激磁相的改變,這表示反應電動 勢偵測電路可以偵測感應電動勢的零交會點。 反應電動勢偵測電路產生位置訊號並擷取出零交會點後,利用換相原理可知在零交 會點後 30 度即為換相點,此時開關導通至下一區間。每一區間之未激磁相皆固定,利 用此一規律可簡單利用數位控制器處理位置訊號,擷取零交會點,產生換相訊號,完成 開關切換。
a v a H P v b H c H a v a e ZCP H 6 H T 圖 3.5 位置訊號波形示意圖
3.4 飛輪二極體效應
在第二章提到由於馬達定子線圈具有電感效應。換相時開關停止導通,馬達線圈上 的電流不會立刻停止,而是慢慢減少,造成電流會改為流向開關上之飛輪二極體,此時 飛輪二極體導通。若為上臂飛輪二極體導通,馬達端電壓強制變為高電壓V ;若是下臂d 飛輪二極體導通時,馬達端電壓會強制接地變為零。如圖 3.6 所示,在每一開關換相時 刻,由於飛輪二極體效應之緣故,開關雖然已經完成切換,但是端電壓仍然需要一段二 極體時間,將馬達線圈上的電流放盡。此二極體時間會造成位置訊號出現切換雜訊。 反應電動勢偵測電路主要是偵測反應電動勢的零交越點以求得正確的換相時間 點,但由於上述之飛輪二極體效應會造成在利用位置訊號尋找零交會點時出現誤判,進 而找到錯誤的零交會點,使得開關在錯誤的時間點作換相。有鑑於此,必須要克服位置 訊號雜訊之影響,估測出正確的換相點。所以本文在實作上將會設計一個遮罩,以屏蔽 飛輪二極體時間所造成之雜訊。 a v a H b H c H Pattern 5 6 1 2 3 4 圖 3.6 具飛輪二極體效應之端電壓v 與位置訊號 a3.5 無感測控制模擬
根據圖 3.1 之控制架構,在 PSIM 模擬環境下,所建立之模擬電路圖如圖 3.7 所示。 此模擬電路可分為四個部份:反流器電路其直流電源為 300 伏特;反應電動勢偵測電路; 及用來模擬數位控制器之區塊,此區塊包含了換相訊號產生、速度回授控制、開關訊號 切換;還有兩對接馬達,一個稱為驅動端馬達,另一個稱為發電機端馬達並加上 Y 接三 相平衡電阻R ,作為負載與觀察馬達各相反應電動勢電壓之用途。 g 反流器電路 反應電動勢 偵測電路 對接馬達 數位控制 模擬器 圖 3.7 無位置感測控制之模擬電路圖模擬之驅動馬達參數與反流器參數列於表 3.1,發電機馬達參數列於表 3.2,反應電 動勢偵測電路元件參數列於表 3.3。 表 3.1 驅動端馬達參數 定子電阻 2.2 定子電感 Lq 4.58mH ,Ld 3.61mH 反應電動勢電壓常數 (Line-to-Line) 75Vp /krpm 額定功率 750W 馬達極數 4 pole 馬達慣量 2 61 . 1 kgcm 直流鏈電壓 300V PWM 頻率 5kHz 表 3.2 發電機端馬達參數 定子電阻 1.65 定子電感 Lq 3.43mH,Ld 2.73mH 反應電動勢電壓常數 (Line-to-Line) 65Vp /krpm 額定功率 1000W 馬達極數 4 pole 馬達慣量 2 92 . 1 kgcm 表 3.3 反應電動勢偵測電路元件參數 電阻R1 300k 電阻R2 12k 電阻R 3 312k 電容C 330pF
3.5.1 穩態模擬
這一小節主要是討論所提無感測控制之穩態特性,首先討論馬達在兩種不同負載下 之模擬波形,分別考慮輸出負載R 為g 40及100之模擬條件。當負載R 為g 40,馬 達電流i 及反應電動勢a e 模擬波形圖,如圖 3.8 所示,a TH為估算換相時間, r H T 為馬達 實際轉速r所對應之換相時間。當換相時間命令分別穩定於 5ms (1000rpm)、2.5ms (2000rpm)和 1.666ms (3000rpm),觀察馬達反應電動勢e 、電流a i 可以發現,轉速穩定a 時,所採用之無感測控制策略,確實使馬達電流與各相反應電動勢同相,亦即轉子磁場 與定子磁場保持 90 度,最佳轉矩產生角度。在換相時間命令為 5ms (1000rpm)時,換相 時間估測誤差較大約為 2%;換相時間命令為 2.5ms (2000rpm)時,換相時間估測誤差最 小。 當負載R 為g 100,馬達電流i 及反應電動勢a e 模擬波形圖,如圖 3.9 所示,馬達a 電流亦與其反應電動勢同相且轉速穩定。在換相時間命令為 5ms (1000rpm)時,換相時 間估測誤差較大約為 3%;換相時間命令為 2.5ms (2000rpm)時,換相時間估測誤差最小。 觀察所模擬無感測控制在穩態運轉時之結果,可知在不同的轉速及不同負載大小的情況 下,皆可保持系統的穩定且能保持最佳轉矩。這證明了無感測控制架構在穩態下是可以 確實執行。ms 0 . 5 ms 1 . 5 ms 2 . 5 ms 9 . 4 ) 0 . 1000 ( rpm ) 4 . 0 98 ( rpm ) .5 1 96 ( rpm ) 4 . 0 2 10 ( rpm ms 8 . 4 (1041.7rpm) A 2 a i V 30 a e
ms
9
H T r H T (a) ms 2.5 (2000.0rpm) ms 2.503 ms 2.497 (2002.4rpm) ) 1997.6 ( rpm ms 4.5 A 2 a i V 30 a e H T r H T (b) ms 1.70 ms 1.65 ms 1.60 ) 2 . 2941 ( rpm ) 3125.0 ( rpm ) 3 . 0 3 0 3 ( rpm H T r H T a i A 2 a e V 30 ms 3 (c) 圖 3.8 各命令下之模擬波形(Rg 04 ):(a) T ms H 5 * (1000rpm); (b) T ms H 2.5 * (2000rpm);(c) T ms H 1.666 * (3000rpm)ms 5 ms 1 . 5 ms 9 . 4 ms 8 . 4 ) 0 . 1000 ( rpm ) 4 . 0 98 ( rpm ) 4 . 0 2 10 ( rpm ) .7 1 4 10 ( rpm
ms
9
V 30 H T r H T A 2 ea a i (a) ms 2.5 ms 2.55 ms 2.45 ) 000 2 ( rpm ) 1960 ( rpm ) 40 0 2 ( rpm ms 4.5 V 30 A 2 a i a e r H T H T (b) 0 ms 1.70 ms 1.75 ms 1.65 ms 1.60 ) 2 . 2941 ( rpm ) 3125.0 ( rpm ) 3 . 0 3 0 3 ( rpm ) 2857.1 ( rpm a i A 2 a e V 30 H T r H T ms 3 (c) 圖 3.9 各命令下之模擬波形(Rg 001 ):(a) T ms H 5 * (1000rpm); (b) TH* 2.5ms (2000rpm);(c) TH* 1.666ms (3000rpm)3.5.2 換相時間命令變化暫態模擬
除了考慮無感測電路穩態時的表現,亦需考慮到電路在暫態時的情況。當換相時間 命令由 5ms (1000rpm)減少到 1.666ms (3000rpm),如圖 3.10 所示。在命令變動時,由於 轉速誤差變大,使得無感測控制進入暫態。但是隨著轉速誤差收斂,無感測控制很快就 回復穩態,其暫態時間約為 1.5 秒。 s 1 1.5ms 2.0ms 2.5ms 3.0ms 3.5ms 4.0ms 4.5ms 5.0ms 5.5ms (3333.3 rpm) (2500.0 rpm) (2000.0 rpm) (1666.6 rpm) (1428.6 rpm) (1250.0 rpm) (1111.1 rpm) (1000.0 rpm) (909.1 rpm) H T * H T 圖 3.10 換相時間命令從 5ms (1000rpm)切換至 1.666ms (3000rpm)暫態模擬波形3.5.3 負載切換暫態模擬
負載端的變動也會造成無感測控制進入暫態,因此必須考慮讓電路能在最短的時間 內由不穩定的暫態回復到穩態中。根據圖 3.11,當負載R 從g 100切換至40時,馬達 轉速瞬間降至約 2600rpm,但約在 0.8 秒內即能回復到穩定的狀態。根據本節所提無感 測控制模擬,其不論是在穩態模擬或者是暫態模擬,系統均能保持穩定。 s 2 . 0 1.57ms 1.66ms 1.75ms 1.84ms 1.93ms 2.02ms (3184.7 rpm) (3012.0 rpm) (2857.1 rpm) (2717.4 rpm) (2590.7 rpm) (2475.2 rpm) H T * H T 圖 3.11 負載切換暫態模擬波形第四章
晶片功能模組設計
4.1 現場可規劃邏輯閘陣列(FPGA)介紹
現場可規劃邏輯閘陣列(Field Programmable Gate Array,FPGA)是一種可規劃邏輯陣 列 IC,它提供了「邏輯閘陣列」(Gate Array,GA)元件的特性與「可程式陣列邏輯」 (Programmable Array Logic,PAL)元件的規劃彈性,具有以下幾個特點:一、使用者可 以規劃任意邏輯電路;二、FPGA 元件可以重複使用燒錄;三、可以快速合成使用者的 電路;四、具有完善的軟體可以配合使用。
利用 FPGA 來實現控制系統有著不少優勢在,除了有較高的運算時脈外,其平行運 算的能力也相當高。除此之外,利用 FPGA 實現的控制器,其行為亦非常接近等效之類 比控制器,而且不但能保留其優點,如無計算上的延遲(No Calculation Delay)、更高的 頻寬(Higher Bandwidth)等;更能將其缺點排除,如參數漂移(Parameter Drifting)、較低的 積分層級(Poor Level of Integration)。除此之外,FPGA 與其類似功能之 CPLD 做比較亦 存在不少優點,在編程上 FPGA 比 CPLD 具有更大的靈活性,且 FPGA 非常適合複雜邏 輯結構,這些優勢也讓 FPGA 更適合使用在控制系統上。 FPGA 元件內部主要包含了三大部分,數萬個標準的可程式邏輯單元(Configurable Logic Blocks,CLBs),排列形成NN的電路矩陣;每個邏輯單元均連接至縱向網路及 橫向網路,外部在圍繞一圈輸入輸出單元,如圖 4.1 所示。當電路完成設計後,便可以 把產生之電路架構編譯檔下載至 FPGA 中進行連線規劃,成為一顆具有特定功能之 IC。 這樣不但縮短了研發時間,同時又擁有多次燒錄等功能,而且也大大增加設計方法上之 彈性。 接下來將介紹 FPGA 的設計流程。首先 FPGA 的設計方法有二種,分別為圖形化流 程(Schematic Flow)以及硬體描述語言編輯(HDL Editor),然而近年來電路設計的規模日 益龐大複雜,若使用圖形化的設計方法則相當的費時且容易發生錯誤,因此利用硬體描 述語言的設計方式成為主流,一般常見的硬體描述語言有 VHDL、Verilog 等,而本論
文所使用的為 Verilog。 圖 4.1. FPGA 元件基本結構 將所希望設計的電路利用上述方法完成後,接下來則可以做行為模擬(Behavior Simulation)及合成後的函數模擬(Function Simulation),藉此可以了解所設計的電路功能 是否正確。驗證功能正確後,就可以進行時序模擬(Timing Simulation),模擬電路在燒入 FPGA 後,所造成延遲是否符合需求。
4.2 無感測驅動各功能模組規劃
圖 4.2 表示一顆 120 度方波驅動無位置感測控制之 FPGA 晶片內部系統架構,利用 Verilog 在晶片中完成各模組功能。大致上包含了開關控制模組、啟動模組、開關導通 區間選擇模組、PWM 產生模組、開關訊號產生模組、無感測模組、換相時間估測模組、 PI 控制模組,接著使用 Xilinx ISE 10.1 整合所有功能模組並燒錄於 UBD-Spartan3E-ST3E 發展板上,搭配外部反應電動勢偵測電路與反流器,即可完成一套無感測驅動系統,以 下將逐一說明各個模組功能性。
Reset Start
Switching Signal Generator
Sensorless Commutation Signal Generator a H b H c H PI Control Start Up Pattern Select PWM * r Error_LED H H T 13 13 13 PWM_5k S_start 13 SU_P 3 SL_P 3 Pattern 3 6 T G 5 T G 4 T G 3 T G 2 T G 1 T G SU S_en Switch Control Error D_SU D_PI P_ex trig H Commutation Period Counter Look Up Table * H T 圖 4.2 無感測驅動晶片系統架構
4.2.1 開關控制模組
開關控制模組,如圖 4.3 所示。其定義如表 4.1。當模組時脈 Clk 正緣觸發時便開始 進行開關控制模組,此時偵測 Error 訊號狀態,若 Error 為高準位表示 IGBT 過電流,必 須設定 S_en 為高準位強制關閉開關訊號產生模組以保護 IGBT 且亮起 FPGA 發展板上 的一個 LED 警示過電流發生。Clk_40M 為正緣觸發時也同時偵測 Reset 及 Start 訊號, 當 Start 為高準位時,設定 SU 為高準位以準備啟動馬達;當 Reset 為高準位時,設定內 部訊號 R_r 為高準位以重設所有暫存器為零。假若 Reset 與 Start 同時為高準位,此時不 做任何動作。 Reset Start Error Error Protect S_en Function Select Clk_40M Reset Registers SU R_r Error_LED 圖 4.3 開關控制模組方塊圖 表 4.1 開關控制模組各訊號定義 腳位名稱 屬性 位元數(bit) 訊號定義 Clk_40M Input 1 模組時脈(40MHz)
Error Input 1 DIP-IPM
內部錯誤訊號 Reset Input 1 重設暫存器訊號 Start Input 1 馬達啟動訊號 S_en Output 1 開關訊號產生模組 致能訊號 SU Output 1 啟動模組致能訊號
4.2.2 啟動模組
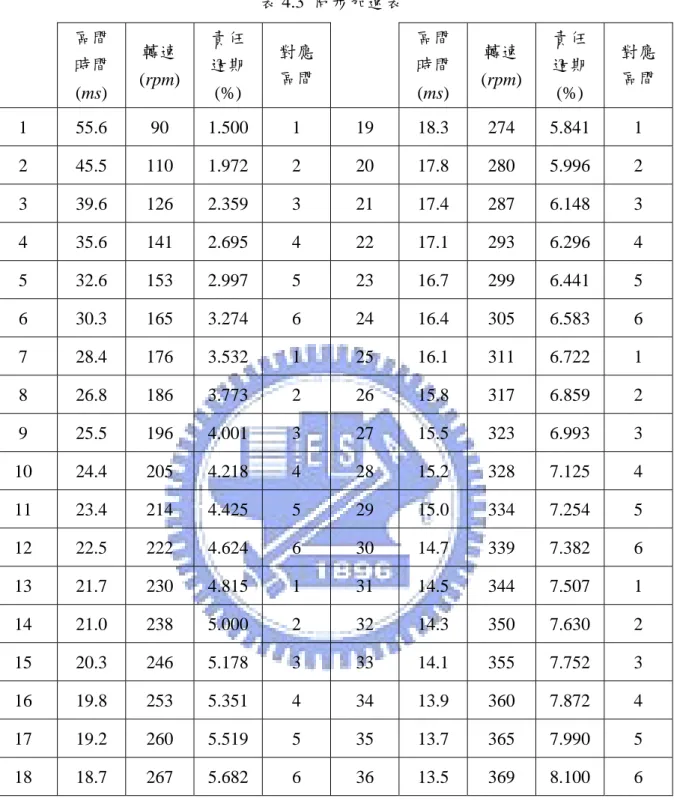
由於在馬達正式運轉前,無法得知馬達轉子停滯位置,所以需將轉子校正到一已知 位置。利用圖 2.9 介紹 120 度方波脈波寬度調變之開關導通組合,將開關組合固定於區 間 6 一段時間,即導通 T1、T6 完成轉子定位。當確定馬達轉子位置後,方能進行驅動。 馬達轉子位置定位後,依序循環改變開關組合狀態,開關組合開始由區間 1、2、 3、…、6 順序變化,過程中我們令 PWM 責任週期和同步頻率皆為線性變化。實作上利 用查表法逐步減少每一個開關組合的時間並同時配合轉速增大 PWM 責任週期,即可使 馬達加速,如表 4.3 所示。速度換算如(3.8)。 圖 4.4 為啟動模組方塊圖,當 Clk_40M 正緣觸發時偵測 SU 為高準位,立即開始轉 子定位,持續導通開關 T1、T6,0.5s 後開始查表順序輸出 SU_p 及 D_SU,並將 S_start 設為高準位,使無感測換相模組開始運作。表 4.2 定義了此模組中的各個訊號。 圖 4.4 啟動模組方塊圖 表 4.2 啟動模組各訊號定義 腳位名稱 屬性 位元數(bit) 訊號定義 Clk_40M Input 1 模組時脈(40MHz) SU Input 1 啟動模組致能訊號 SU_p Output 3 啟動區間訊號 D_SU Output 13 啟動模組責任週期 S_start Output 1 無感測模組致能訊號表 4.3 同步加速表 區間 時間 (ms) 轉速 (rpm) 責任 週期 (%) 對應 區間 區間 時間 (ms) 轉速 (rpm) 責任 週期 (%) 對應 區間 1 55.6 90 1.500 1 19 18.3 274 5.841 1 2 45.5 110 1.972 2 20 17.8 280 5.996 2 3 39.6 126 2.359 3 21 17.4 287 6.148 3 4 35.6 141 2.695 4 22 17.1 293 6.296 4 5 32.6 153 2.997 5 23 16.7 299 6.441 5 6 30.3 165 3.274 6 24 16.4 305 6.583 6 7 28.4 176 3.532 1 25 16.1 311 6.722 1 8 26.8 186 3.773 2 26 15.8 317 6.859 2 9 25.5 196 4.001 3 27 15.5 323 6.993 3 10 24.4 205 4.218 4 28 15.2 328 7.125 4 11 23.4 214 4.425 5 29 15.0 334 7.254 5 12 22.5 222 4.624 6 30 14.7 339 7.382 6 13 21.7 230 4.815 1 31 14.5 344 7.507 1 14 21.0 238 5.000 2 32 14.3 350 7.630 2 15 20.3 246 5.178 3 33 14.1 355 7.752 3 16 19.8 253 5.351 4 34 13.9 360 7.872 4 17 19.2 260 5.519 5 35 13.7 365 7.990 5 18 18.7 267 5.682 6 36 13.5 369 8.100 6
4.2.3 無感測換相模組
此模組串聯在啟動模組之後,主要功能在決定無感測換相點及無感測區間選擇並且 檢查零交會點偵測是否正確。模組方塊圖如圖 4.5 所示;各訊號定義如表 4.4 所示。當 從啟動模組傳來之 S_start 訊號為高準位時,代表無感測換相開始。首先使用一個多工器 且根據目前區間訊號來選擇所需位置訊號Ha、Hb、Hc,篩選出各相端電壓含有零交會點 資訊的區間,假若目前導通區間為第 6 區間,C 相即為未激磁相,此時HMUX為H ;若cB 相即為未激磁相,HMUX 為H ,依此類推並合成一個訊號b HMUX。接著從HMUX 中擷
取出零交會點 ZCP,並利用零交會點找出適合的換相點,產生換相點訊號 H。在此之前 為了預防在暫態下零交會點訊號的不穩定導致判斷錯誤,先設定所擷取之零交會點必須 界於 25 度至 35 度間才可為正確偵測零交會點。當連續三次正確偵測零交會點,送出 P_ex 至區間選擇模組與 PWM 產生模組且進入無感測階段。在無感測狀態下,責任週期 維持固定不變。此時開關導通區間之切換時間,不再依照查表法。改為根據每當換相點 訊號 H 正緣觸發時,累加器即開始進行累加,並且同時輸出累加值為無感測區間訊號 SL_p,累加值上限設定為 6。若已達上限,在下次 H 為正緣觸發時更新累加值為 1,依 此循環完成無感測時開關區間選擇。 a H b H c H ZCP MUX H ZCP Detection Commutation Signal Generator ZCP Check Pattern Accumulator P_ex H SL_P S_start Clk_40M 3 3 trig H . 圖 4.5 無感測換相模組方塊圖
表 4.4 無感測換相模組各訊號定義 腳位名稱 屬性 位元數(bit) 訊號定義 Clk_40M Input 1 模組時脈(40MHz) S_start Input 1 無感測模組啟動訊號 Pattern Input 3 區間訊號 a H Input 1 A 相位置訊號 b H Input 1 B 相位置訊號 c H Input 1 C 相位置訊號 trig H Output 1 零交會點脈衝訊號 H Output 1 換相訊號 SL_p Output 3 無感測區間訊號 P_ex Output 1 啟動與無感測 切換訊號 零交會點偵測架構,如圖 4.6 所示。根據 3.4 節,每次換相時,由於飛輪二極體導 通,此時所取得之反應電動勢端電壓波形會有一短暫二極體時間,此情況會導致零交會 點偵測失敗。所以HMUX 需要經過一數位濾波器,在此應用上遮罩時間 0.2ms 必須大於 飛輪二極體導通時間,才能避免發生誤判。最後利用單端邊緣觸發來尋找零交會點位 置。由於零交會點位置分成高準位到低準位及低準位到高準位兩種,所以分別利用兩計 數器來擷取零交會點位置並輸出 fLH、fHL,最後使用 AND 邏輯閘合成一個零交會點訊 號 ZCP。 ZCP MUX H Clk_40M Single Edge Trigger Digital Filter Counter
0.2ms Low to HighCount
Count High to Low AND LH f HL f 圖 4.6 零交會點偵測架構圖
在正確獲得零交會點訊號後,由 2.3 節馬達換相時機可知,在零交會點往後延遲 30 度電氣角即為換相點。如圖 4.7 所示,為換相點產生架構圖。當零交會點訊號為正緣觸
發時,產生一個 0.1us 的脈衝訊號Htrig,利用Htrig可計算出兩零交會點之時間差,將上
次時間差堆疊值與此次時間差值作平均,可得一校正零交會點時間差。不直接使用本次 時間差的原因乃是因為在擷取零交會點時,所設定區間界於 25 度至 35 度間,為了能將 擷取誤差縮小才使用一校正時間差。兩零交會點間隔為 60 度電氣角,一半的零交會點 時間差即可作為零交會點至換相點所需之相位移間隔。圖 4.8 為無感測換相模組內部訊 號處理波形示意圖。 ZCP Clk_40M Counter 1us Pulse Generator Commutation
Counter Stack Phase
Shift H trig H 圖 4.7 換相點產生架構圖 a H b H c H Pattern 5 6 1 2 3 4 ZCP H H T trig H LH f HL f MUX H ] [K Ttrig Ttrig[K1] 2 ] [K Ttrig 圖 4.8 無感測換相模組內部訊號波形示意圖