行政院國家科學委員會專題研究計畫 成果報告
應用時間序列分析方法建構精簡型車流預測模式暨區域控
制策略之研究
計畫類別: 個別型計畫 計畫編號: NSC93-2622-E-009-012-CC3 執行期間: 93 年 05 月 01 日至 94 年 04 月 30 日 執行單位: 國立交通大學統計學研究所 計畫主持人: 周幼珍 計畫參與人員: 黃鷰筑、張宛茹 報告類型: 精簡報告 處理方式: 本計畫為提升產業技術及人才培育研究計畫,不提供公開查詢中 華 民 國 94 年 8 月 9 日
國科會補助提升產業技術及人才培育研究計畫成果精簡報告
學門領域:工程處
計畫名稱:應用時間序列方法建構精簡行車流預測模型暨區域控制策略之研究
計畫編號:NSC 93 - 2622 - E - 009 - 012 - CC3
執行期間:93 年 5 月 1 日 至 94 年 4 月 30 日
執行單位:國立交通大學統計研究所
主 持 人:周幼珍
參與學生:
姓 名
年 級
(大學部、碩士班、博 士班)已發表論文或已申請之專利
(含大學部專題研究論文、碩博士論 文)工作內容
張宛茹
統研所碩一
理論推導、模式估計
及程式撰寫
黃鷰筑
統研所碩一
理論推導、模式估計
及程式撰寫
陳彥仲 運科管系四年級
資料收集及整理
黃信堯 運科管系四年級
資料收集及整理
劉志剛 運科管系四年級
資料收集及整理
合作企業簡介
合作企業名稱:建程科技股份有限公司
計畫聯絡人:曾明德
資本額:新台幣貳千萬元
產品簡介:微電腦控制器、影像偵測器、戶外電子資訊看板、通訊傳輸控制器
網址: 電話:(03)5509362
研究摘要(500 字以內):見精簡報告
人才培育成果說明:大學生熟悉對大量資料之收集及處理、研究生則對模式相關
理論了解並操作熟練
技術研發成果說明:已獲得頗為符合實際狀況之預測值再予修正後可實作
技術特點說明:為控制器中流量預測應用統計方法之首創
可利用之產業及可開發之產品:交通號誌控制器
推廣及運用的價值:待得到修正後更精確之預測值後將可用於所有交通訊號控制
器,加強號誌控制績效。
一、計畫中文摘要
關鍵字:迴歸、檢查、截尾、時間序列、車流、佔有率、預測 道路容量、規劃設計,攸關道路交通績效甚鉅。都會區尖峰時間之瓶頸路口 經常交通癱瘓,如何有效規劃設計道路及正確預測車流量,來解決交通窘境成為 目前政府相關單位之首要課題。 目前國內之號誌系統仍採定時時制 TOD 運作模式,採動態控制策略或觸動 控制策略,號誌系統與應對之控制策略於學術研究單位仍以實驗性質居多;產業 界主要礙於區域控制策略應用所需之理論層次較高,且多需搭配完全之及時交通 資訊(full information),且偵測器單價不低,不論國內外相關系統或研究,地方政 府多不敢貿然採用,難有實質成果。國內號誌系統於尖峰時間仍多由保安警察人 員於瓶頸路口執行交通指揮與號誌控制,雖可收及時控制之效,但因操控人員個 人主觀判定之變異性極大,常無法有效達到車流之續進與號誌之連鎖。因此,若 能正確預測出車流量,或許會有相當大的幫助。 本研究之主要目的在於求得車流曲線模式的方程式,並找出描述此模式的適 合度指標,且正確預測出車流量。首先利用車流之歷史資料,以統計方法建構一 套車流預測模式,並進行推估,若能正確預測,便能提升整體交通績效。二、研究計畫之背景及目的
1. 研究背景 道路容量、規劃設計,攸關道路交通績效甚鉅。都會區尖峰時間之瓶頸路口 經常交通癱瘓,如何有效規劃設計道路及正確預測車流量,來解決交通窘境成為 目前政府相關單位之首要課題。 目前國內之號誌系統仍採定時時制 TOD 運作模式,採動態控制策略或觸動 控制策略,號誌系統與應對之控制策略於學術研究單位之著墨不少,但仍以實驗 性質為主,證實效果並無顯著影響;產業界目前尚無實作,主要礙於區域控制策 略應用所需之理論層次較高,於實務應用時難以直接應用,且多需搭配完全之及 時交通資訊(full information),然而偵測器單價不低,若採用較少之偵測設備,則 無法達到交通改善績效,交通控制策略形同虛設,而另一方面,不論國內外相關 系統或研究,地方政府多不敢貿然採用,缺乏明確市場誘因下,難有實質成果。 目前國內多數號誌系統於尖峰時間仍多由保安警察人員於瓶頸路口執行交 通指揮與號誌控制,雖可收及時控制之效,但因操控人員個人主觀判定之變異性 極大,就單獨路口而言,尚難以維持固定水準以上之號誌運作績效,且個人操控 範圍與可視範圍僅及於所在路口,即便透過無線電互相傳遞訊息,仍無法有效達 到車流之續進與號誌之連鎖。因此,若能正確預測出車流量,或許會有相當大的 幫助。2. 研究動機及目的 正確的計算道路容量,與道路規劃設計、績效評估之成效有這莫大關係。而 台灣地區車輛的駕駛習性、車流的組成、道路幾何設計及其他道路交通特性均迥 異於國外情況,並不能完全套用國外的車流模式來分析。針對國人之駕駛行為與 道路之車輛特性、交通特性及道路時值特性等,研擬一套適用於台灣地區道路容 量計算方法,而找出車流曲線模式是所有工作的第一步,因此求得車流曲線模式 的方程式,並找出描述此模式的適合度指標,且正確預測出車流量便是本報告的 目的。
三、研究方法與流程
1. 資料背景 根據台灣地區公路容量手冊及美國公路手冊中對於交通車流的運作狀況,通 常以流量(flow),速度(speed)與密度(density)等三個基本衡量要素來描述,現將其 定義及特性加以簡述,且說明密度(density)與佔有率(Occupancy)的關係。 1. 流量(Flow, q) 此值為測量車流大小的變數,定義為在某一時段(T)內通過單一車道或車道 群某一斷面的車輛數(N),此流量可以表示為 q=N/T,單位可為年、月、日、 小時或更小的時間單位。 2. 速率(Speed, u) 單位時間內車輛行駛或移動的距離,其單位為公里/小時。一般所使用的速 率都為平均旅行速率(average travel speed),較能表現出整個車隊的特性。平 均旅行速率可分為時間平均速率以及。 (1) 時間平均速率:係指在某一瞬間內,通過某一特定點之車輛速率的算術 平均數。 (2) 空間速率:車輛或車隊通過某路段的距離與所需時間的比值。 一般利用雷達測速器與偵測器所量測的速率平均值,稱為現點速率,其算術平均 數即為時間平均速率。現點速率之調和平均數即為空間平均速率。本研究中所指 的速率則為空間平均速度。 3. 密度(Density, k) 定義為某段時間內在單一車道或車群中單位長度上之車輛數,單位為(輛 / 公里)。 4. 佔有率(Occupancy) 有車時間佔全部時間的百分比,單位為 (%) 2. 資料處理及選取 本研究數據來自雷達微波偵測器 RTMS,將偵測器架設至道路旁,擷取車流 量、佔有率和平均速度等資料,每十秒鐘記錄一次,偵測器可二十四小時運作。資料收集時間為 2005 年 4 月 25 日早上七點三十分至十點二十一分共 1001 筆資料。由於當天是星期一早上的上班時間,預期將會有塞車的情況存在,於是 採取此筆資料當作樣本 [附錄一] 。
3. 變數解釋
資料裡面 vol1~vol3 分別代表 zone1、zone2 和 zone3 的車流量,vol=0 表 示 10 秒內無車輛經過,vol = 8 表示 10 秒內有 8 輛車經過。oc1~oc3 分別代表 zone1、zone2 和 zone3 的佔有率。oc = 0 表示佔有率是 0﹪,oc = 100 表示佔有 率是 100﹪。avgspeed 代表 10 秒內經過車輛的平均速度。值得注意的是,由於 偵測器設計與設置區位的問題,流量大於某個值之後將觀測不到,於是在我們的 模式裡將會考慮 Censor 的問題。 4. 分析過程 首先了解車流量與佔有率的關係,將當天早上的 1001 筆資料畫出 zone1 的 Occupancy1-Volume1 散佈圖與 Avgspeed-Volume1 散佈圖。 圖 3-1:Occupancy1-Volume1 散佈圖 Occupancy 1 - Volume 1 0 1 2 3 4 5 6 7 8 0 20 40 60 80 10 Occupancy 1 (%) Vo lu m e 1 (輛 ) 0 圖 3-2:Avgspeed-Volume1 散佈圖 Avgspeed - Volume 1 0 1 2 3 4 5 6 7 8 0 10 20 30 40 50 60 70 Avgspeed (km/hr) Vo lu m e 1 ( 輛 )
觀察圖 2-1 發現 zone1 的流量與佔有率之間皆有二次曲線的關係,由於流量 會被前一期的流量所影響,於是模式假設裡有二次項的佔有率變數與時間序列 AR(1)的存在。又因偵測器偵測車流量時,當流量大於某一值之後將無法觀測, 於是模式假設裡定義一個常數為 Censor 值。再觀察平均速度與流量之間也有二 次曲線的關係,於是模式假設裡有二次項的平均速度變數。
四、車流預測
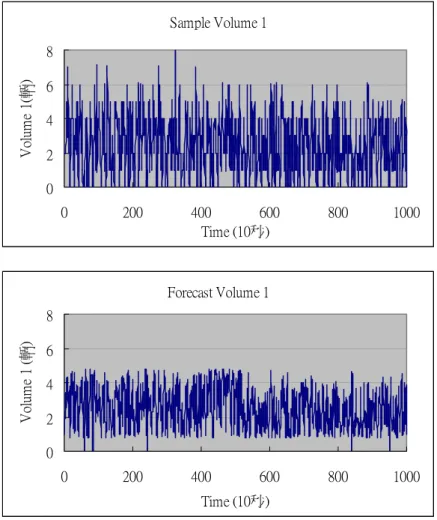
將資料數據放入已估計之模式裡,並對 zone1 的車流量作預測,可得到以下 的對照圖。圖 4-1:Sample Volume1 和 Forecast Volume1 對照圖
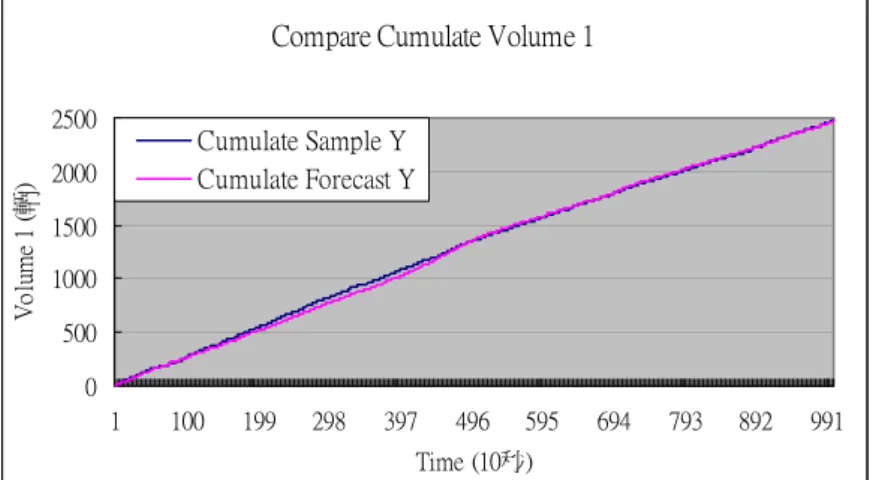
Sample Volume 1 0 2 4 6 8 0 200 400 600 800 1000 Time (10秒) Vo lu m e 1( 輛 ) Forecast Volume 1 0 2 4 6 8 0 200 400 600 800 1000 Time (10秒) Vo lu m e 1 (輛 ) 再將樣本流量與預測流量做累積處理,並畫入同一個圖裡,則更可以清楚的 發現此模式所預測之車流量相當接近於資料數據。
圖 4-2:Cumulate Sample Volume 和 Cumulate Forecast Volume 對照圖
Compare Cumulate Volume 1
0 500 1000 1500 2000 2500 1 100 199 298 397 496 595 694 793 892 991 Time (10秒) V o lu m e 1 ( 輛 ) Cumulate Sample Y Cumulate Forecast Y
五、參考文獻
1. 蔡輝昇,「交通控制理論與實務」,生合成出版社,民國 79 年 4 月。 2. 林豐福、何志宏等,「台灣地區先進交通管理系統(ATMS)中都市交通號 誌控制邏輯標準化與系統建置標準作業程序之研究─定時式/動態式控 制邏輯標準化:規劃報告」,交通部運輸研究所等,民國 90 年 7 月。 3. 交通部運輸研究所,「台灣地區公路容量手冊」,交通部運輸研究所,民 國 79 年。4. Federal Highway Administration, “Traffic Control Systems Handbook”, April 1985.
5. Federal Highway Administration, “Computer Controlled Traffic Signal Systems”, December 1982.
6. Federal Highway Administration, “Evaluation of the Optimized Polices for Adaptive Control Strategy”, May 1989.
7. Luojia Hu: “Estimation of a Censored Dynamic Panel Data Model, ”
Department of Economics Northwestern University, (2002), 1-22.
8. Takeshi Amemiya: “Regression Analysis When the Dependent Variable is Truncated Normal”, Econometrica, (1973), 997-1016.