國 立 交 通 大 學
電 機 資 訊 學 院 電 子 與 光 電 學 程
碩 士 論 文
LED背光源整合系統設計之色溫管理
COLOR TEMPERATURE MANAGEMENT FOR LED
BACKLIGHT INTEGRATION SYSTEM DESIGN
研 究 生:溫竣貴
指導教授:郭浩中 博士
LED背光源整合系統設計之色溫管理
COLOR TEMPERATURE MANAGEMENT FOR LED
BACKLIGHT INTEGRATION SYSTEM DESIGN
研 究 生:溫竣貴 Student: Chun-Kuei Wen 指導教授:郭浩中 博士 Advisor: Dr. Hao-chang Kuo
國立交通大學
電機資訊學院 電子與光電學程
碩士論文
A Thesis
Submitted to Institure of Electro-Optical Engineering College of Electrical Engineering and Computer Science
National Chiao-Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Electronics and Electro-Optical Engineering June 2006
Hsinchu, Taiwan, Republic of China
LED背光源整合系統設計之色溫管理
研究生:溫竣貴 指導教授:郭浩中 博士 國立交通大學 電機資訊學院 電子與光電學程﹙研究所﹚碩士班摘 要
整體系統主要是LED的色溫管理,方法由微控制器產生PWM控制LED的驅動 電路使LED發各種顏色的可見光,於LED在長時間使用下會隨溫度的變化而影響色 溫與亮度的穩定性,所以配合顏色感測模組做光電轉換的類比轉數位的讀取以做 為光回授的控制,另一功能溫度顯示以溫度感測元件讀取LED背光板溫度作一監 控。整合系統包括軟體發展環境規劃、硬體設計規劃與整體功能驗證事項。軟體 部分微控制器採用Motorola之16位元MC9S12控制晶片,嵌入式即時作業系統設計 描述如下,包括記憶體管理、周邊資源管理,應用程式介面(API)規劃。硬體部分 包括LED陣列模組、LED(RGB)驅動模組、顏色感測模組與溫度感測模組選用,其 電路設計有電氣考量與整體實際的Layout製作。在整體功能驗證方面,本文規劃了 MC9S12 EVM PWM 0~100%DUTY訊號輸出、顏色感測之光電轉換值輸入、溫度 感測準確性皆由訊號檢測器讀取各單一驗證,最後LED背光板亮度與溫度做光回授 補償的驗證。COLOR TEMPERATURE MANAGEMENT FOR LED BACKLIGHT INTEGRATION SYSTEM DESIGN
Student: Chun-Kuei Wen Advisor: Dr. Hao-Chung Kuo
Degree Program of Electrical Engineering and Computer Science National Chiao-Tung University
Abstract
This study aims to verify the function of the integration system designed by the combination of the software and hardware development. The software design includes Micro-controller (Motorola 16 bit MC9S12 control chip) and Embedded Real Time Operation System (memory management, peripheral management and application program interface). The hardware design involves LED array module and LED (RGB) driver module, in which the electrical design concerns its specifications and an integrated layout is designed. The function of the system derived from the PWM signals was produced by MCU to control the driver circuit of the LED and produced visible light with different colors. The stability of chromaticity and brightness of the LED can be affected by its long-term use. Therefore, the Optical Feedback (OFB) is controlled by conducting optical-to-electric change and by reading the analog-to-digital signals. In addition, the thermal monitor is read through the temperature sensor on the LED backlight. In conclusion, Ultimately the 0~100% DUTY signal output of the MC9S12 EVM PWM, the optical-to-electric change output and the accuracy of backlight temperature are all verified correct. Finally the brightness and temperature of the LED backlight also gained the accuracy of the optical feedback.
誌 謝
感謝指導教授郭浩中老師給我這機會參與研究,並給予啟發性獨立思考與作 學問的方法,還有要特別感謝學長兼助教張亞銜博士提供我豐富的資源,並給我 寶貴的意見與讓我體會到熱心的研究精神,可以在最短的時間內完成研究實驗使 我授益良多,感謝郭老師實驗室與我接觸過的學生無意間也幫助我很多,在電資 專班修課的過程中感謝跟我一起成長奮鬥過的同學,我們曾經利用下班空閒時間 努力與討論解決課業上問題,感謝實驗室專班學弟對於我在LED驅動電路研究過程 中之關心。 最後要提的是我服務單位工研院機械所智慧車輛組電動動力技術部的同事, 在我這兩年進修過程中讓自己深深感覺到真正的「創意」和「突破」。目 錄
中文摘要 ...i 英文摘要 ... ii 誌謝 ... iii 目錄 ...iv 表列 ... vii 圖列 ... viii 第一章 緒論 ...1 1.1 研究動機與目的...1 1.2 研究背景...3 1.3 研究方法與系統描述...10 1.4 論文內容概述...12 第二章 MCU控制單元 ...13 2.1 軟體發展環境規劃...13 2.1.1 軟體發展工具 ...13 2.1.2 編譯器設定規劃 ...15 2.2 MC9S12核心與數學函式庫 ...17 2.1.1 概述 ...17 2.2.2 MC9S12核心函式...17 2.2.3 定點數學運算函式 ...17 2.2.4 查表函式 ...18 2.3 記憶體與周邊資源管理...19 2.3.1 概述 ...19 2.3.2 記憶體分配規劃 ...19 2.3.3 記憶體管理原則 ...222.3.4 微控制器各內建模組時脈規劃 ...22
2.3.4.1 振盪器時脈(Oscillator Clock) ...22
2.3.4.2 系統時脈(System Clock) ...22
2.3.4.3 匯流排時脈(Bus Clock)...23
2.3.4.4 計時器解析度(Timer Count Resolution)...23
2.3.4.5 倒數計時器解析度(Modulus Down Counter Resolution) ....23
2.3.4.6 序列通訊(SCI)Baud Rate ...24
2.3.4.7 序列周邊通訊界面(SPI) Baud Rate ...24
2.3.4.8 IIC Baud Rate ...24
2.3.4.9 看門狗周期(COP Watchdog Time-out Period) ...24
2.3.4.10 類比轉數位模組時脈(ATD Clock)...24 2.3.4.11 Flash/EEPROM時脈(For Erase/Program) ...25 2.3.4.12 RAM時脈 ...25 2.3.4.13 脈寬調變時脈(PWM Clock) ...25 2.3.4.14 MSCAN時脈規劃 ...26 2.3.5 微控制器各模組初始化設定 ...27 2.3.5.1 中斷向量表 ...27 2.3.5.2 PLL初始化 ...27 2.3.5.3 看門狗計時器初始化 ...27
2.3.5.4 Memory Map Control(MMC)初始化 ...27
2.3.5.5 Flash/EEPROM時脈初始化 ...27
2.3.5.6 ATD初始化 ...27
2.3.5.7 倒數計時器初始化 ...27
2.3.5.8 IC/OC計時器初始化 ...28
2.3.5.9 輸出/輸入Pin(Port Integration Module)初始化 ...28
2.3.5.10 RAM變數初始化 ...28
第三章 LED元件運用設計 ...29 3.1 元件特性...31 3.2 LED陣列模組...34 3.3 15吋LED背光模組………..37 第四章 LED驅動設計 ...41 4.1 應用電路...43 4.2 固定電流...45 4.3 RGB驅動電路 ...48 第五章 顏色與溫度感測模組 ...50 5.1 顏色模組的尺寸...50 5.2 顏色模組運用原理...53 5.3 實際光電轉換量測...54 5.4 溫度感測………61 第六章 整合背光模組系統 ...67 6.1 PC端調校程式設計...68 6.2 TARGET端調校程式設計...69 6.3 顏色感測回授控制...70 6.4 系統的整合測試...75 第七章 結論 ...79 參考文獻 ...81
表 列
表 1.1 LED 與 CCFL優點比較………2 表 1.2 LED的種類與應用……….4 表 1.3 白光LED與RGB混光LED效能分析……….5 表 1.4LED 驅動IC廠商規格表……….7 表 2.1 軟體發展工具表 ...14 表 2.2 MC9S12核心函式名稱...17 表 2.3 整數數學函式表 ...18 表 2.4 查表函式原型表 ...18 表 3.1 LED的絕對最大範圍 ...32 表 3.2 典型電與光特性 ...33 表 3.3 15吋 LED 背光光源規格 ...40 表 4.1 MBI1816腳位敘述...42 表 5.1 平面電線聯接腳位 ...52 表 5.2 PWM訊號、安捷倫的顏色模組讀取值(GB)且經低通濾波電路比較………..55 表 5.3 PWM訊號、安捷倫的顏色模組讀取值(R)且經低通濾波電路比較………….56 表 5.4 安捷倫的顏色感測模組由PC端讀取到AD的值………57 表 5.5 PWM訊號與HAMAMATSU的顏色感測模組讀取比較………...58 表 5.6 HAMAMATSU的顏色感測模組讀取值在經低通濾波器訊號比較…………59 表 5.7 PC端讀取到AD的值...60 表 5.8 JTD503 特性值 ...63 表 5.9 THERMISTOR 與電表對應值……….66 表 6.1 RGB DUTY (%) 比例調顏色...76圖 列
圖 1.1 LED亮度發展趨勢圖……….3 圖 1.2 背光系統方塊 ...10 圖 2.1 軟體發展環境示意 ...14 圖 2.2 編譯器之Make File 流程...17 圖 2.3 MC9S12DG128I/O Register、EEPROM與RAM之記憶體分配 ...20 圖 2.4 MC9S12DG128之Flash ROM記憶體分配 ...21 圖 2.5 振盪器頻率、系統時脈與匯流排時脈之關係式 ...23 圖 3.1 LED 的基本特性………..30 圖 3.2 尺寸敘述 ...31 圖 3.3 RGB Vf-If 曲線...32 圖 3.4 LED排版間隔尺寸………...34 圖 3.5 64 PCS LED陣列驅動電路 ...35 圖 3.6 64 PCS LED陣列驅動電路LAYOUT...36 圖 3.7 實際64 PCS LED陣列驅動電路 ...36 圖 3.8 15吋16:9LED背光模組電路圖………37 圖 3.9 15吋 LED 背光板使用 3in1(a)正面 (b)背面………..………..38 圖 3.10 15吋 LED 背光光源測量出均勻度92 %……….………..38 圖 3.11 15吋LED 背光板(MCPUB)溫度變化………39 圖 3.12 15吋 LED 背光光源結構………39 圖 4.1 MBI1816方塊圖...41 圖 4.2 MBI1816 共用電壓訊號電路...43 圖 4.3 MBI1816 PWM控制電路 ...44圖 4.5 Rext-Iout 曲線...46 圖 4.6 負載電壓 ...40 圖 4.7 Current Skew……….47 圖 4.8 MBI1816 RGB LED驅動電路...49 圖 4.9 (a)MBI1816 LAYOUT(b)實際LAYOUT………....49 圖 5.1 封裝尺寸正面 ...51 圖 5.2 封裝尺寸側面 ...51 圖 5.3 平面電線聯接腳位 ...51 圖 5.4 PCB layout...52 圖 5.5 實際HDJD-S831-QT333腳位聯接...52 圖 5.6 SENSOR IC 方塊...53 圖 5.7 典型的特徵 波長-光強度 、TA-VD ...53 圖 5.8 感測訊號檢測點 ...54 圖 5.9 溫度分壓感測電路圖………...62 圖 5.10 PC端診斷程式 ...66 圖 6.1 背光模組系統 ...67 圖 6.2 PC端調校程式 ...68 圖 6.3 (a)背光源各控制項目 (b)光回授控制方塊圖 ...70 圖 6.4 程式撰寫回授流程圖 ...74 圖 6.5 實際整體的系統 ...75 圖 6.6 (a)DUTY =65時無光回授系統(b)轉成比值(613-Y)/613...77 圖 6.7 (a)DUTY = 65時有光回授系統 (b)轉成比值(613-Y)/613...78
第 一 章
緒論
1.1
研究動機與目的
現階段,在大尺寸電視的應用上,LCD技術已經逐漸改善到開始可以與穿傳統 的CRT電視及PDP電視相競爭。這主要是基於下述技術的演進可以順利達成,其中 包括有背光源系統的改善、CCFL的動態控制、外部電極的營光燈(EEFL)的發展、 LED背光源的發展、更快的液晶切換速度的發展等。上述五項技術發展需求,直接 或間接與背光源相關的就佔有四項,可以了解未來LCD-TV是否有競爭力?是否能 勝出?其主要關鍵即在於背光源的解決方案。 LCD目前較常採用CCFL作為背光光源,但因CCFL背光驅動線路複雜,要求驅 動電壓高,及演色性能力等等因素,再加上背光的光源是系統中耗電量最大的部 分,所以在功率限制日趨嚴苛的情況下,目前已逐漸被產業討論使用LED作為代 替,將LED點光源均勻分佈在面板上較傳統的冷陰極管線之分佈更能得到均偁的背 光效果表1.1LED 與 CCFL優點比較。表 1.1 LED 與 CCFL優點比較 CCFL LED 電源 AC 300V 以上 高電壓點燈需要Inverter DC 5V 以下 優點 熱量少 反應速度快、可在高頻操作、 壽命較久(6~10萬小時) 可平面封裝開發成輕薄短小的產品 缺點 一碎、廢棄物含汞污染、 電磁干擾、低溫無法使用 點光源特性、需多顆組成光源、結構較複 雜 、若採螢光粉封裝演色性不佳 目前運用產品 LCD TV LCD Monitor NB 交通號誌、小型手電筒、汽車、景觀照明 價格 一般 約CCFL兩倍
1.2
研究背景
最早應用半導體P-N結髮光原理製成的LED光源問世於20世紀60年代初。當時 所用的材料是GaAsP,發紅光(λp=650nm),在驅動電流為20毫安培時,光通量 只有千分之幾個流明,相應的發光效率約0.1流明/瓦。 70年代中期,引入元素In和 N,使LED產生綠光(λp=555nm),黃光(λp=590nm)和橙光(λp=610nm), 光效也提高到1流明/瓦。 到了80年代初,出現了GaAlAs的LED光源,使得紅色LED 的光效達到10流明/瓦。 90年代初,發紅光、黃光的GaAlInP和發綠、藍光的GaInN 兩種新材料的開發成功,使LED的光效得到大幅度的提高。在2000年,前者做成的 LED在紅、橙區(λp=615nm)的光效達到100流明/瓦,而後者製成的LED在綠色 區域(λp=530nm)的光效可以達到50流明/瓦。 圖 1.1 LED 亮度發展趨勢圖最初 LED 用作儀器儀錶的指示光源,後來各種光色的 LED 在交通信號燈和大 面積顯示幕中得到了廣泛應用,產生了很好的經濟效益和社會效益。以 12 英寸的 紅色交通信號燈為例,在美國本來是採用長壽命,低光效的 140 瓦白熾燈作為光 源,它產生 2000 流明的白光。經紅色濾光片後,光損失 90%,只剩下 200 流明的 紅光。而在新設計的燈中,Lumileds 公司採用了 18 個紅色 LED 光源,包括電路損 失在內,共耗電 14 瓦,即可產生同樣的光效。 汽車信號燈也是 LED 光源應用的 重要領域。1987 年,我國開始在汽車上安裝高位?車燈,由於 LED 回應速度快(納 秒級),可以及早讓尾隨車輛的司機知道行駛狀況,減少汽車追尾事故的發生。 另 外,LED 燈在室外紅、綠、藍全彩顯示幕,匙扣式微型電筒等領域都得到了應用。 對於一般照明而言,人們更需要白色的光源。1998 年發白光的 LED 開發成功。 這種 LED 是將 GaN 晶片和釔鋁石榴石(YAG)封裝在一起做成。GaN 晶片發藍光 (λp=465nm,Wd=30nm),高溫燒結製成的含 Ce3+的 YAG 螢光粉受此藍光激發 後發出黃色光發射,峰值 550nm。藍光 LED 基片安裝在碗形反射腔中,覆蓋以混 有 YAG 的樹脂薄層,約 200-500nm。 LED 基片發出的藍光部分被螢光粉吸收,另 一部分藍光與螢光粉發出的黃光混合,可以得到得白光。現在,對於 InGaN/YAG 白色 LED,通過改變 YAG 螢光粉的化學組成和調節螢光粉層的厚度,可以獲得色 溫 3500-10000K 的各色白光,表 1.2 LED 的種類與應用。 表 1.2 LED的種類與應用 應用波長範圍 分類 主要材質 主要應用 AlGaAa、Gap GaAsP(一般亮度) 資訊、家電等之指示燈 550-700 nm 紅、橘、 黃光 AlGalnP(高亮度) 顯示看板、背光源、交通號誌、車用指示燈 400-550 nm 可見光 藍、綠、 紫光 InGaN 顯示看板、背光源、交通 號誌、車用指示燈、照明 < 380 nm 紫外光 AlGaN 照明、殺菌燈 850-950 nm 不 可 見 光 紅外光 GaAlAs、GaAs 遙控器、IrDA模組
由於顯示器產量快速成長,導致其內部相關零組件重要性提昇,而光源就是 其中一個不可或缺的組件,目前市面上大多使用 CCFL 做微光源,基於它本身一些 缺陷如有彩度不足及環境污染等問題,故使用固態半導體光源 LED 做為背光源為 未來之趨勢,使用 LED 的優勢有:可控制的白光區、生命區、無汞、低驅動電壓等。 在小尺寸背光應用主要於手機面板之背光,而無虛過於考慮彩度不足之問 題;如應用於中小型顯示器中則會有彩度含蓋範圍不夠之問題,所以使用三原色 的LED(紅色、綠色和藍色)來做為顯示器之應用。一般將LED燈源放置於混光用的 導光板邊緣,有底部發光經橢圓鏡面反射入導光板,也有直接放置於導光板上側 邊。 目前世界各國皆把焦點集中在應用範圍最大的白光LED,而所謂白光是利用螢 光材料吸收藍光LED晶片產生的部分光線轉成黃色光線,接著藍光再與黃光混合就 可得白光,或是利用紅、綠、藍三色LED依據色彩學原理混合而成的光,但是實際 上紅、綠、藍三色LED材質表1.3 白光LED與RGB混光LED效能分析有極大的差異, 因此驅動電路表1.4 LED 驅動IC廠商規格表的設計也變得極為反鎖複雜。 表 1.3 白光LED與RGB混光LED效能分析 白光LED RGB混光LED
結構 Blue chip + yellow
Phosphor RGB LEDs(RGGB,GRBRG) Or 3 in 1 package 發光效率 Typ:40-50 lm/W Power package Lumiled:50 lm/W Citizen:60 lm/W Typ:40-50 lm/W 優點 組裝單純 不需混光
High color gamut performance 各LED可單獨調整電流 缺點 色彩表現較差 色彩調整不易 控制電路複雜 需考慮混光,面板加厚 不同顏色,壽命衰減不同
白光LED應用在背光顯示或其他照明應用時,又幾項操作要考慮避免違反最大 電流規格限制與考量環境溫度升高時最大容忍電流值會下降,取得可預測且匹配 的亮度與色溫,以定電流推動。 LCD目前較常採用CCFL作為背光光源,但因CCFL背光驅動線路複雜,要求驅 動電壓高,及演色性能力等等因素,再加上背光的光源是系統中耗電量最大的部 分,所以在功率限制日趨嚴苛的情況下,目前已逐漸被產業討論將使用LED作為代 替。為滿足節能及環保的需求,針對不同應用與不同的功耗範圍,全球許多政府 及能源機構的各種新的能耗標準也紛紛出爐。同時,更加嚴格的規範也在制定中。 降低能耗成為一項無法回避的重要議題,所以對電源管理也提出了更高的要求。 下列了幾家驅動IC的規格與型號 : •Supertex第二代高電壓LED驅動晶片HV9911 •NS小型白色發光二極體驅動器 •Linear白色發光二極體驅動晶片LT3486 •沛亨並聯式白光LED的驅動晶片AIC1848 •可驅動8個LED-東芝白光驅動晶片TB62752AFUG •BCD Semi白光LED驅動器AP3008 •奧地利微電子(Austriamicrosystems)白光LED驅動晶片AS3691 •Catalyst Semiconductor高效白光LED驅動晶片CAT3691 •Vishay SiP12401高效率白光LED驅動器 •Maxim 480mA白光LED倍壓晶片 •安森美高亮度白光LED驅動晶片NCP5603 •Arques白光LED驅動晶片支援兩個LCD背光及Flash LED
表 1.4 LED 驅動IC廠商規格表 廠商 型號 輸入電壓 範圍 輸出電壓 固定 電流 固定 電壓 驅動LED數量
Supertex HV9911 9~250V Programable Yes No -
On semi NCP5603 2.7~55V 350mA Yes No -
BCD AP3008 2.5~15V 20mA@6LED Yes 4LEDs froma 3.2V Supply
Toshoba TB62752AFUG 2.8~55V 7-segment:25mA
or greater, 800mW - - 8LED
NS LM2751 2.8~55V [email protected]
80mA@5V Yes - -
Linear Technology LT3486 2.5~24V 200mA Yes - 16LED
Analog AIC1848 2.7~45V 100mA@ 3.1V - Yes -
austriamicrosystems AS3691 0.41~15V 400mA@4LED
1.6A@1LED Yes - 4LED
Catalyst
Semicoductor CAT3614 3~5.5V 124mA - - 4LED
Vishay Sip12401 1.8~50V Regulated - - -
Maxim MAX1576 2.7~55V 480mA Yes - 8LED
Arques AQ913X AQ914X 2.7~55V Yes - - 廠商 轉換 效率 電壓 誤差 可程式化 軟體啟動 過壓 保護 過電流 保護 高溫 保護 線性 功能 PWM功能
Supertex - 2% YES YES YES - YES YES
On semi 90% - - - -
BCD 83% - NO YES - - - YES
Toshoba 80% 3~5% - YES YES - - -
NS 90% 3% YES - - YES YES YES
Linear Technology 85% 3% YES YES - YES - YES
Analog 85% 4% - - YES YES - -
austriamicrosystems NA 0.5% - - - YES YES YES
Catalyst
Semicoductor 91% 3% YES - - YES YES -
Vishay 80% - YES YES YES - YES
Maxim 80% - YES YES YES YES - YES
• LED控制正向電流方案 LED是由電流驅動的器件,其亮度與正向電流呈比例關係。有兩種方法可以控 制正向電流。第一種方法是採用LED V-I曲線,一般利用一個電壓電源和一個整流 電阻器,來確定產生預期正向電流所需要向LED提供的電壓。第二種方法是利用固 定電流來驅動LED。固定電流可消除正向電壓變化所導致的電流變化,因此,可產 生固定的LED亮度。利用固定電流只需要調整通過電流檢測電阻器的電壓,而不用 調整電源的輸出電壓。 • 過壓保護 在固定電流模式中,LED驅動元件必須提供過壓保護功能。無論負載是多少, 都可產生固定電流。但如果負載電阻增大,相對的電源的輸出電壓也必須隨之增 廠商 動作頻頻 歐盟規範 封裝 價格
Supertex Programmable Yes 16PIN SOIC 5.4美元
On semi 1000KHz - DFN10 - BCD 1.2MHz Yes SOT-23-5 - Toshoba - - SOT-23-6 105日元 NS 725KHz, 300KHz 37KHz, 9.5KHz Yes 10-PIN LLP No-Pullback 1.1美元 Linear Technology 1.25MHz - DFN-16 TSSOP-16E - Analog 1.8MHz - SOT-23-6 - austriamicrosystems NA - QFN4x4 - Catalyst Semicoductor 1MHz - 12-TDFN -
Vishay 600KHz - 6-PIN, Power PAK
MLP33 -
Maxim 1MHz - 24QFN 2.45美金
加。當電源檢測到過大的負載電阻,或負載斷開的話,那麼輸出電壓可能會超出 IC,或其他元件的最大使用電壓範圍。 • PWM調光 許多攜帶型LCD背光應用都需要有限度地調節亮度。在這一部份可以採用兩 種調光方式,就是類比或 PWM的方法。採用類比調光,就像大家所熟悉的,在LED 上增加50%的電流,這樣就可以提高50%的亮度。 • 負載斷開 負載斷開是LED驅動電源中一個經常被忽視的功能,因為在電源失效時,可以 利用負載斷開將LED與電源斷開。這種功能在下列兩種情況下是相當重要的,那就 是斷電和PWM調光。如果沒有負載斷開的話,輸出電容仍舊會提供LED電源,直 到PWM再次打開電源。因為電容在每個PWM迴圈開始時,都會出現放電的現象, 一次電源必須在每個PWM迴圈開始時,將輸出電容器充電,所以,會在每個PWM 迴圈出現時,會產生突波脈衝。突入的電流會造成系統效率降低,並在輸入匯流 排上出現暫態電壓。而如果具有負載斷開功能的話,LED就會從電源斷開,這樣當 電源失效時,就不會出現漏電流,而且在PWM進行亮度調整的迴圈間,輸出電容 器都是充滿的。
1.3
研究方法與系統描述
許多攜帶型LCD背光應用都需要有限度地調節亮度。在這一部份可以採用兩種 調光方式,就是類比或 PWM的方法。採用類比調光,就像大家所熟悉的,在LED 上增加50%的電流,這樣就可以提高50%的亮度。但這種方法是有缺點的,那就 是會出現LED顏色偏移,並需要採用類比控制信號,因此,這種模式一般來說使用 率的人並不多。而利用PWM調節亮度的關鍵是,為確保使用者的眼睛看不到PWM 脈衝現象,PWM信號的頻率必須高於100Hz,最大PWM頻率是取決於電源啟動與 回應時間。 圖 1.2 整合背光系統圖1.2為整合背光系統而整個控制系統包括溫度感測訊號、光強度感測訊號、 低通濾波電路、PWM控制器、LED驅動電路、LED背光板與LCD顯示控制器等做 同步的整合運作,而系統控制概述LCD顯示控制器與背光微控制器同步連結運作 一開始送出PWM訊號控制LED驅動電路調整電流源使LED背光板發光,而溫度感 測訊號與光強度感測訊號值經由低通濾波再回微控制器做處理與分析,再傳送 PWM訊號控制驅動電路去調LED亮暗與顏色做回授控制。操作功能可調整LED背 光源顏色(由RGB三色混合光以比例混成各種顏色)與亮度(由RGB三色混合光以比 例同時增減) ,且有維持LED發光亮度不受溫度變化影響此為光回授控制。
1.4
論文內容概述
一開始敘述研究背景動機與目的且說明系統架構,而下幾章分別介紹各系統 中的模組與元件,分別有第二章微控制器整體架構,MC9S12 EVM 做控制的主體 其記憶體管理、周邊資源管理(Peripheral Management),任務排程(Task Scheduler) 與應用程式介面(API)規劃,其控制PWM(調DUTY) 、A/D。第三章LED元件運用 考慮到的因素,COTCO發光元件LED將64 PCS LED 串並聯組成一模組,其配合前 一項研究做最大範圍內電壓電流溫度的驅動。第四章LED驅動設計考慮到的因素 Macroblock公司的MBI1816 固定電流LED 驅動IC,設計組合三個驅動IC固定電流 R=31mA、G=48mA、B=25mA,使三色LED元件混合發白光。第五章顏色與溫度 感測模組特別驗證了光電轉換的準確性與溫度準確性。第六章整合背光模組系統 驗證陣列式LED發各顏色光與光回授的功能,最後是結論與未來的研究方向。
第 二 章
MCU控制單元
2.1
軟體發展環境規劃
2.1.1 軟體發展工具
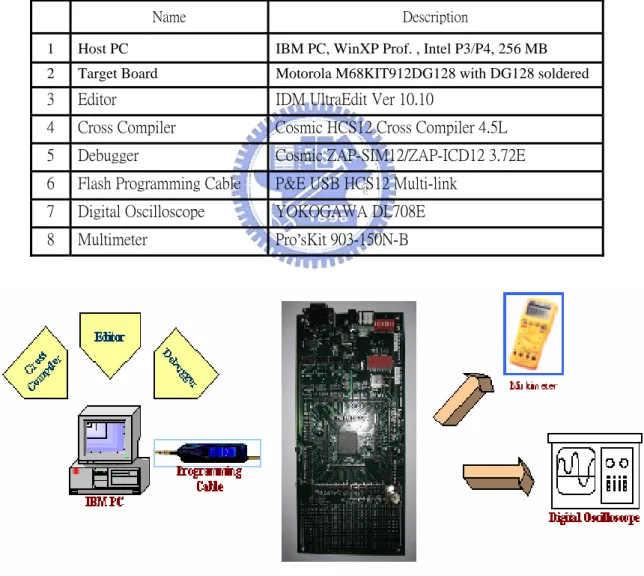
本文規劃軟體發展環境如圖 2.1 所示。表 2.1 為軟體工具項目列表。由於各項 功能在發展階段,為縮短軟體發展時程,快速驗證周邊特性是否可實現於 EVM Board 上,與 RTW Embedded Coder。作業系統及通訊程式…等與硬體底層相關程式 仍以手寫 C 語言方式進行。在 Backlight Unit 尚未釋出前,軟體開發採用內嵌微控制器,MC9S12DG128,的 M68KIT912DG128 Evaluation Board,。MC9S12DG128 在 D-Family 裡算是一顆功能 相當完備之晶片,其內建 128K Bytes Flash 與 8K Bytes RAM,龐大的記憶體很適合 當發展用之微控制器。
P&E Inc.之 USB HCS12 Multi-link 為 Evaluation Board 與 PC 端連接界面,其具 有自動頻率偵測功能,簡化與 Evaluation Board 的連接,亦提供與 MC9S12 相容的 Background Debug Mode,可中斷 CPU 的執行,進行軟體偵錯。透過 Multi-link 可從 PC 端快速下載程式至微控制器,進行 Real Time In-circuit Debugging,並可從中讀取 微控制器記憶體資料,以進行軟體除錯或驗證。
程式編輯器選用頗受好評的IDM UltraEdit。跨平台編譯器與除錯器採用Motorola 3rd Party,Cosmic Inc.,所出品的套裝程式。除錯器有兩個,分別為Cosmic ZAP-ICD12 與Cosmic ZAP-SIM12。ZAP-SIM12可算是Host/PC端的模擬器,可進行軟體計算、偵 錯與驗證,無法進行跨平臺遠端除錯。ZAP-ICD12可與Evaluation Board及USB HCS12 Multi-link搭配,進行跨平臺Real-Time、In-circuit驗證與偵錯,亦內建Flash/EEPROM 的燒錄功能,提供使用者下載程式至EVM Board內。 表 2.1 軟體發展工具表 Name Description
1 Host PC IBM PC, WinXP Prof. , Intel P3/P4, 256 MB
2 Target Board Motorola M68KIT912DG128 with DG128 soldered
3 Editor IDM UltraEdit Ver 10.10
4 Cross Compiler Cosmic HCS12 Cross Compiler 4.5L
5 Debugger Cosmic ZAP-SIM12/ZAP-ICD12 3.72E
6 Flash Programming Cable P&E USB HCS12 Multi-link
7 Digital Oscilloscope YOKOGAWA DL708E
8 Multimeter Pro’sKit 903-150N-B
2.1.2 編譯器設定規劃
並非每臺主機都有相同的IDE工具與環境,為求程式專案跨PC之移植性高及管 理方便,編譯器的Make File透過MS-DOS之Bat File實現。此Bat File建議置於專案 之根目錄下,以利程式發展時方便進行編譯動作。圖 2.2為Make File程式流程圖, 以下條列式說明編譯流程。
(1) 先建立一暫存目錄於專案根目錄下,取名為_temp_dir_。
(2) 將Source Files、Header Files、Link Command Files複製至_temp_dir_。 (3) 執行Cosmic之編譯與組譯程式,cx6812.exe,編譯與組譯Source Codes。請
注意, -ab、+nowiden為目前控制程式所必需之編譯參數,欲知其意義請 參照【1】。
(4) 經由Link Command File的記憶體設定,執行鏈結程式,clnk.exe,可產生 Executable File, H12 File。
(5) 承 (4) , 本 文 規 劃 程 式 記 憶 體 配 置 採 用 HCS12 之 分 頁 機 制 (Paged Mechanism),所以鏈結程式之『-bs14』需被設定,一來啟動Bank Switching 機制,二來可說明每頁之大小為2**14 = 16384 bytes。細節請參照【1】。 (6) 執行chex.exe,轉換Executable File的格式成Motorola的S19 Format。 (7) 執行clabs.exe產生Absolutely List Files。
2.2 MC9S12核心與數學函式庫
2.2.1 概述
本章提供可存取或可設定MC9S12核心暫存器的函式庫,以供Blackliht Unit應 用層程式使用。亦提供多個定點數學(Fixed-point operation)與查表(Look-up Table) 函式庫,應付嚴苛的運算需求。為深入微控制器核心底層,與追求快速執行效率, 這些函式庫皆以HCS12指令集,即HCS12組合語言撰寫而成,以下分別敘述之。關 於HCS12核心暫存器與指令集,請參考【2】。
2.2.2 MC9S12核心函式
本文提供了六個設定或存取MC9S12底層核心的函式,其函式名稱如表 2.2所 示。 表 2.2 MC9S12核心函式名稱 名 稱 1 SEI() 2 CLI() 3 NOP() 4 GET_CCR() 5 UPDATE_CCR() 6 KickWatchdog()2.2.3 定點數學運算函式
表 2.3為本文所提供的6個定點數學函式列表,均為利用組合語言寫成之全域 函數,可供需快速運算的中斷服務程式或前景程式使用。表 2.3 整數數學函式表
函數原型
1 U8 mul8x8sr7(U8 arg1, U8 arg2)
2 U8 mul8x8x8sr16(U8 arg1,U8 arg2,U8 arg3)
3 U16 mul16x8sr8(U16 arg1, U8 arg2)
4 U16 mul16x8sr7(U16 arg1, U8 arg2)
5 U16 mul16x16sr16(U16 arg1, U16 arg2)
6 U16 d_16x8_by16(U16 arg1,U8 arg2,U16 arg3)
7 U16 lagfilt(U8 q, U8 input, U16 filtered)
2.2.4 查表函式
為了簡化計算,許多控制參數須靠查表而得。為了增進程式的運算效率,本 文提供以MC9S12之『tbl』指令【2】撰寫而成的2D/3D查表函式,其函數原型如表 2.4所示。 表 2.4 查表函式原型表 函數原型1 U8 LKUP9_2D(U8 *Table_Addr , U8 Input_X)
2 U8 LKUP17_2D(U8 *Table_Addr , U8 Input_X)
3 U8 LKUP33_2D(U8 *Table_Addr , U8 Input_X)
4 U8 VarStepLKUP33_2D(U8 *Table_Addr , U8 Input_X)
5 U16 U16LKUP17_2D(U16 *Table_Addr , U16 Input_X)
6 U8 LKUP5_3D(U8 *Table_Addr ,U8 col_arg ,U8 row_arg)
7 U8 LKUP9_3D(U8 *Table_Addr ,U8 col_arg ,U8 row_arg)
8 U8 LKUP17_3D(U8 *Table_Addr ,U8 col_arg ,U8 row_arg)
2.3 記憶體與周邊資源管理
2.3.1 概述
本章敘述MC9S12DG128微控制器的記憶體分配與軟體的記憶體管理原則,陳 述MC9S12時脈規劃與各裝置的初始化設定,並提供A/D與PWM模組驅動程式範 例,以供未來軟體設計之應用。2.3.2 記憶體分配規劃
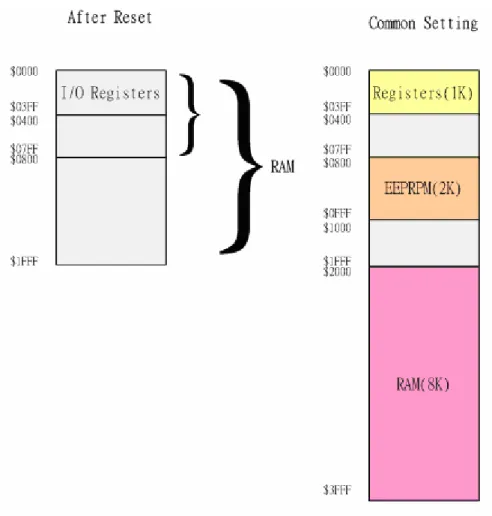
MC9S12DG128內建有8K RAM,2K EEPROM,128K Flash ROM。為善用 MC9S12DG128微控制器的Flash記憶體空間,軟體的記憶體配置採用MC9S12所提 供的『分頁機制(Page Mechanism)』原則【4】【5】【6】。
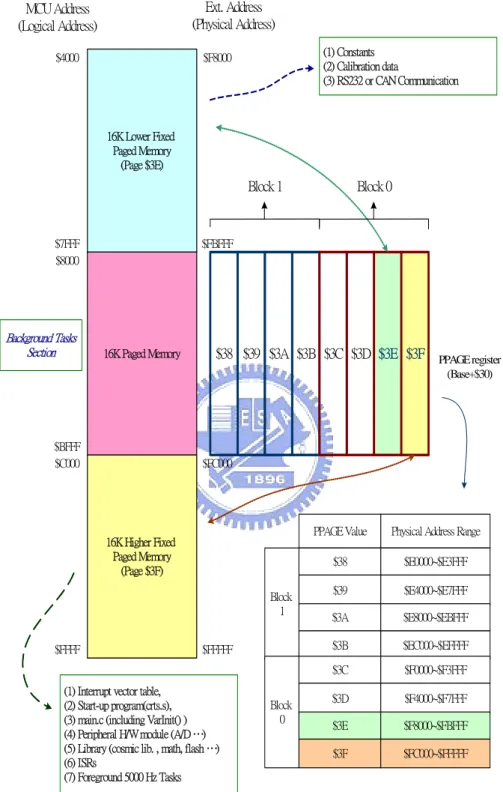
圖2.3與圖2.4為記憶體分配圖(Memory MAP)。圖2.3左邊為微處理器重置(Reset) 後之I/O Registers、RAM與EEPROM記憶體分配圖,而右邊為參考資料【4】所建 議之I/O Registers、RAM與EEPROM記憶體規劃,其中Stack Pointer的起始點為 0x4000。圖2.4為Flash ROM的記憶體分頁示意圖,其中也顯示軟體之記憶體分配 概念。以下敘述其概念原則。
• 通訊程式、常數、調校參數與初始化變數的ROM備份區,配置於位置較低
的固定頁(Lower Unpaged Memory, Page $3E)。
• 開機與初使化設定程式、MC9S12硬體模組設定與控制、函式庫(Standard
Cosmic Libraries、Math Routines、Look-up Routines …, etc.)、中斷服務程式(ISRs)、 前 景 程 式 (Foreground Program) 等 , 均 置 於 位 置 較 高 的 固 定 頁 (Upper Unpaged Memory, Page $3F)。
• 其餘程式置於分頁中(Paged Memory)。
請注意,為了避免跨頁函數呼叫(Inter-Page Function Call)引起的錯誤,強烈建 議 所 有 原 始 檔 須 明 確 定 義 函 數 為 區 域 函 數(Local Function)或全域函數(Global
『static』修飾子(Qualifier)。為求程式維護性的簡便,置於分頁中的全域函數均需 加修飾子,『@far』,以通知編譯器特別為此作跨頁呼叫的處理【1】。
程式編譯完成後會產生目的檔(Object Files),接著進行目的檔鏈結程序(Linking Process)。鏈結主要是將各Object Files重新記憶體分配並鏈結成執行檔(Executable File),記憶體分配規劃由鏈結命令檔(Link Command File)設定。根據圖2.3與圖2.4 所建構的Link Command File設定碼。經由此設定,可決定程式之記憶體配置。關 於Link Command File的設定說明,請參考【1】。
圖 2.4 MC9S12DG128之Flash ROM記憶體分配 16K Lower Fixed Paged Memory (Page $3E) $38 $39 $3A $3B $3C $3D $3E $3F 16K Paged Memory 16K Higher Fixed Paged Memory (Page $3F) MCU Address (Logical Address) Ext. Address (Physical Address) $F8000 $FBFFF PPAGE register (Base+$30) $4000 $7FFF $8000 $BFFF $C000 $FFFF $FFFFF $FC000
PPAGE Value Physical Address Range
Block 1 $38 $E0000~$E3FFF $39 $E4000~$E7FFF $3A $E8000~$EBFFF $3B $EC000~$EFFFF Block 0 $3C $F0000~$F3FFF $3D $F4000~$F7FFF $3E $F8000~$FBFFF $3F $FC000~$FFFFF (1) Constants (2) Calibration data (3) RS232 or CAN Communication Background Tasks Section
(1) Interrupt vector table, (2) Start-up program(crts.s), (3) main.c (including VarInit() ) (4) Peripheral H/W module (A/D …) (5) Library (cosmic lib. , math, flash …) (6) ISRs
(7) Foreground 5000 Hz Tasks
2.3.3 記憶體管理原則
為 簡 化 作 業 系 統 的 設 計 , 本 文 任 意 存 取 記 憶 體 (RAM)管理採用『Simple Method』,亦即不提供任何的記憶體管理機制。不管理也算是一種管理,由應用 程式設計師自行維護記憶體空間與Stack Pointer。本文不建議程式設計師使用Heap Management於Software中,以減少記憶體使用錯誤的風險。根據2.3.2節,本文規劃 Stack Pointer初始點為0x4000,Static RAM Memory之起始點為0x2000,RAM Size 為8K Bytes。
2.3.4 微控制器各內建模組時脈規劃
2.3.4.1 振盪器時脈(Oscillator Clock)
為了避免Controller Area Network(CAN)之來源頻率不穩(Jitter Consideration), CAN的時脈來源將會選擇由振盪器(Oscillator)提供【7】。CAN之Bit Rate一般為500 kbps或250 kbps,且MC9S12之CAN Baud Rate Prescaler Register(CANBTR0)為1 ~ 64 【7】,所以為了保留未來CAN之應用彈性,振盪器的時脈最好為整數,以方便除 頻。根據參考資料【8】有Motorola Inc.提供之4 MHz振盪器計算PLL所需之電容範 例,且4 MHz符合整數的特性,故本文以下採用4 MHz振盪器規劃微處理器各模組 時脈。
2.3.4.2 系統時脈(System Clock)
為發揮MC9S12高速的運算效率,本文採用相位閉鎖迴路(Phase Locked Loop, PLL) 為 系 統 時 脈 產 生 迴 路。系統時脈亦為控制器核心運算頻率 (Core Clock, fcore),MC9S12最高之System Clock為50MHz【8】,本文選用略低之48MHz,以 方便後續各模組時脈的除頻。系統時脈的暫存器設定公式如圖2.5所示,其中fosc = 4 MHz,則SYNR = 5,REFDV = 0可符合fcore = 48 MHz。
圖 2.5 振盪器頻率、系統時脈與匯流排時脈之關係式
2.3.4.3 匯流排時脈(Bus Clock)
由參考資料【9】可知匯流排頻率(fbus )為系統頻率的一半,所以本文規劃之 微控制器Bus Clock為24 MHz。
2.3.4.4 計時器解析度(Timer Count Resolution)
選擇計時器最大除頻值128【10】,雖然解析度較粗糙,但是更適合較長時間 之量測(Input Capture)或控制(Output Compare)。且Timer的Source Clock選擇微控制 器內部之Bus Clock,所以Timer的解析度為如下所示。
24MHz / 128 = 187.5 KHz => 1TCNT = 5.33 us
2.3.4.5 倒數計時器解析度
根據系統需求,有兩個主要的Time-Based Tasks,其中一個Time Step為200 us, 另一Time Step為10 ms。本文規劃MC9S12之Modulus Down Counter模組為這兩項任 務計時。Modulus Down Counter除頻值選擇16,其Source Clock為Bus Clock【10】, 則Down Counter的解析度如下式。
24MHz / 16 = 1.5 MHz => 0.67 us
Modulus Down Counter Register可設定為300,當其倒數至0時,即會產生中斷 要求,並通知CPU將資源交給該處的中斷服務程式(Interrupt Service Routine, ISR)。 如此一來,亦即每 300 * 0.67 = 200 us 產生一次中斷,可符合200 us Time-Based Task 的執行周期。至於10 ms Time-Based Task的執行周期,可利用軟體計數實現。更詳 細的多工排程機制敘述。 1 1 2 + + × × = REFDV SYNR f fcore osc 2 core bus f f = 15 0 ; 63 0 , ≤SYNR≤ ≤REFDV ≤ Where
2.3.4.6 序列通訊(SCI)Baud Rate
由【11】可知 SCI Baud Rate = Source Clock / (16 * SCIBR),以下列舉兩種可 能頻率以供選用。
SCIBR = 78 => 19231 bps => error% = (19231 – 19200) / 19200 * 100% = 0.16% SCIBR = 39 => 38462 bps => error% = (38462 – 38400) / 38400 * 100% = 0.16%
2.3.4.7 序列周邊通訊界面(SPI) Baud Rate
由【12】可知SPI Baud Rate = Source Clock / ((SPPR+1) * 2^(SPR+1)),以下列 舉兩種可能頻率以供選用。
SPIBR = 0x47 => 18750 bps SPIBR = 0x46 => 37500 bps
2.3.4.8 IIC Baud Rate
由【13】可知IIC Baud Rate = Source Clock / IBFD ( Max. = 100 Kbps),以下列 舉兩種可能頻率以供選用。
IBFD = 0x35 => SCL Divider = 1280 => 24MHz / 1280 = 18750 bps IBFD = 0x30 => SCL Divider = 640 => 24MHz / 640 = 37500 bps
2.3.4.9 看門狗周期(COP Watchdog Time-out Period)
Watchdog Timer的Source Clock為振盪器頻率(4 MHz),本文選擇Time-Out Cycles為2^18【9】,則Time-Out Period = 2^18 / (4*10^3(KHz)) = 65.536 ms。
2.3.4.10 類比轉數位模組時脈(ATD Clock)
類比轉數位模組(ATD Module)的Source Clock為Bus Clock,且ATD Clock = Source Clock / (PRS+1),以下為根據參考資料【14】所作之ATD Clock之設計檢查。
• 選擇除頻值7,檢查bus clock是否符合, 8MHz < fbus = 24 MHz < 32 MHz,
Check OK!
• ATD Clock = 24 MHz / (7 + 1) * 0.5 = 1.5 MHz,Check ATD Clock =>
• HCS12 Conversion Time = Min. 14 ATDCLK Cycles = 14 / 1.5 = 9.33 us Max. 28 ATDCLK Cycles = 28 / 1.5 = 16.67 us
2.3.4.11 Flash/EEPROM時脈(For Erase/Program)
Flash與EEPROM的時脈設定皆相同【15】【16】,此時脈用於Flash/EEPROM 的清除與燒寫(Erasing and Reprogramming)。以下根據參考資料【15】,以Flash為 例,說明Flash Clock的設計程序。
• fbus = 24 MHz > 12.8 MHz => PRDCLK = fosc = 4 MHz
• FDIV[5:0] = INT(4*(5+1/24(MHz))) = 20
• FCLK = 4 / (1+20) = 0.19048 MHz > 0.15 MHz, Check OK!
• And (1/FCLK + Tbus) = (1/0.19048 + 1/24) > 5 us, Check OK!
故本文所規劃之Flash Clock,FCLK = 0.19048 MHz。
由於EEPROM Clock與Flash 設計流程相同,故本文之EECLK亦為0.19048 MHz。
2.3.4.12 RAM時脈
RAM Clock為Bus Clock = 24 MHz。
2.3.4.13 脈寬調變時脈(PWM Clock)
MC9S12DG128共有8組8-Bit PWM可供使用,PWM之細部設定資訊請參照 【17】。 假設PWM訊號頻率選用20KHz,選擇PWM0為驅動腳位,Source Clock選用 Clock SA,除頻值可設為1,PWMSCLA選用3,則 Clock SA = (24MHz / 1) / (2 * 3) = 4MHz。 所以PWM暫存器,PWMPER0與PWMDTY0的設定如下。 PWMPER0 = Clock SA / PWM_Freq = 4MHz / 20KHz = 200。 PWMDTY0 = 0 ~ 200 (0% ~ 100%),解析度為1/200。2.3.4.14 MSCAN時脈規劃
MC9S12DG128內建兩組CAN,以下規劃MSCAN的時脈,保留CAN模組的使 用彈性。本文選擇振盪器頻率為CAN的Source Clock,以避免頻率跳動(Jitter
Consideration)【7】。以下參考【18】規劃CAN的除頻值、Bit Time與各區段(Segment)
的Time Quanta。假設系統規格如下, 系統規格: Bit rate = 250 kbps
Bus length = 20 m
Bus propagation = 5*10^-9 sm-1 ;
Physical interface delay(Tx + Rx) = 150 ns at 85oC. MCU Oscillator frequency = 4 MHz
則
Prescaler = 4
Nominal Bit Time (Time quanta) = 8 SYN_SEG = 1 PROP_SEG = 1 PHASE_SEG1 = 3 PHASE_SEG2 = 3 RJW = 3 Oscillator tolerance = 1.485%
2.3.5 微控制器各模組初始化設定
2.3.5.1 中斷向量表
中斷向量表記錄MC9S12所有中斷服務程式的起始位址,本文規劃所有未使用 的中斷向量均指向一具有無窮迴圈的函式,SWISR(),以促使Watchdog Reset,降 低Code Runaway的風險。其中_stext()為程式起始點。2.3.5.2 PLL初始化
根據2.3.4.1、2.3.4.2與2.3.4.3節的規劃,設定相鎖迴路(Phase Locked Loop, PLL)、微處理器的系統時脈與匯流排時脈,本文規劃一旦外部振盪器失效,強迫 微控制器進入Self Clock Mode。
2.3.5.3 看門狗計時器初始化
根據5.1.3.4.9節的規劃,設定Watchdog Timer的周期,並啟動之。
2.3.5.4 Memory Map Control(MMC)初始化
根據【2】【4】與2.1.3.2節的規劃,設定MC9S12DG128之I/O register,RAM, EEPROM的區段位址。
2.3.5.5 Flash/EEPROM時脈初始化
根據2.3.4.11節的規劃,設定Flash/EEPROM的Erasing/ Programming時脈。2.3.5.6 ATD初始化
本文假設EVM Board在A/D的應用不需跨頻道的連續A/D轉換,故規劃A/D轉 換序列(Conversion Sequence)長度為1,且使用10Bit、Non-FIFO Mode【14】。A/D 轉換時脈根據2.3.4.10節之規劃。參考【14】。請注意,由於MC9S12DG128之ATD Module從Power-Down到Power-On最長需20us 的穩定期,所以需注意在軟體流程中,設定ATD Module的Power-On時機。
2.3.5.7 倒數計時器初始化
根據2.3.4.5節的規劃,使用Modulus Down Counter為兩個Time-Based Tasks計 時。倒數計時器之周期為200us。詳細設定請參考【10】。
請注意,在清除中斷遮罩並進入Background Logic之前,請先清除Underflow Flag, 再致能(Enable) Modulus Down Counter中斷。
2.3.5.8 IC/OC計時器初始化
根據2.3.4.10節的規劃,設定Timer的解析度為5.33us。提供IC/OC Timer的初始 化範例,以供未來控制程式發展應用之參考。
請注意,在清除中斷遮罩並進入Background Logic之前,請先清除所有的Timer Interrupt Flag,再致能(Enable)所需的Timer中斷。
2.3.5.9 輸出/輸入Pin(Port Integration Module)初始化
根據參考資料【19】所提供的General Purpose I/O(GPIO)設定範例。在此範例 中,PORT A、PORT E、PORT M與PORT H都設成Output Port,初始準位為Low Level。其餘I/O Pin為Reset狀態。未來此部份的初始化可依實際需求,進行相對的 變更。
2.3.5.10 RAM變數初始化
其使用HCS12組合語言進行Static RAM變數初始化動作,本文規劃無初始化之 變數其初使值均為0。2.3.5.11 SCI初始化
本文規劃調校程式採用RS232通訊機制,且MC9S12 D-Family內建2組序列通 訊界面(SCI),本文規劃RS232於SCI0。RS232的Baud Rate規劃與考慮PC的通訊規 範,選用19231 bps。其餘設定請見參考資料【11】。第 三 章
LED元件運用設計
如何有效提升LED的亮度,實為刻不容緩之課題,而一般來說,提升LED亮度 有兩種途徑,一為提高效率,二為增加功率。就提高效率而言,目前效能最大的 障礙在於外部取光效率低落,而其原因主要歸咎於不同的介質間之全反射損失與 構裝材料本身的吸收,以LED元件來看,經由電子、電洞結合,光從LED晶片活性 層發出後,經過封裝材料才到達空氣而光必須經過許多折射率不同之介質,如磊 晶層或封裝材料層等,若光從高折射率材料進入低折射率時介質時,介面就會發 生全反射現象,使光波無法有效導,出降低亮度。由此可知,若要增加外部取光 效率,則需調變構裝形式或封裝材料來將光導出元件 。在改變構裝形式的部分, 可在構裝中設置反光板(鏡子) ,使鏡子凹面朝向封裝表面,讓LED晶片發出發出之 光受到鏡子反射,照射到封裝表面,將光波導出LED元件外部,增加整體亮度。晶 片表面粗化或建構光子晶體也是目前提高外部取光效率之熱門方法,其最主要利 用週期性折射率分佈而使光線發生衍射,進而從晶片內部發射到外部的光線就會 增加。(a) (b) 圖3.1 LED 的基本特性
略提 LED 的基本特性,圖(a): LED的偏壓相對應的電流值, ,圖(b): LED的電 流大小對應到的發光強度。 單位: cd(燭光). 電流較大時 ,電流和發光強度是呈比 例。
3.1
元件特性
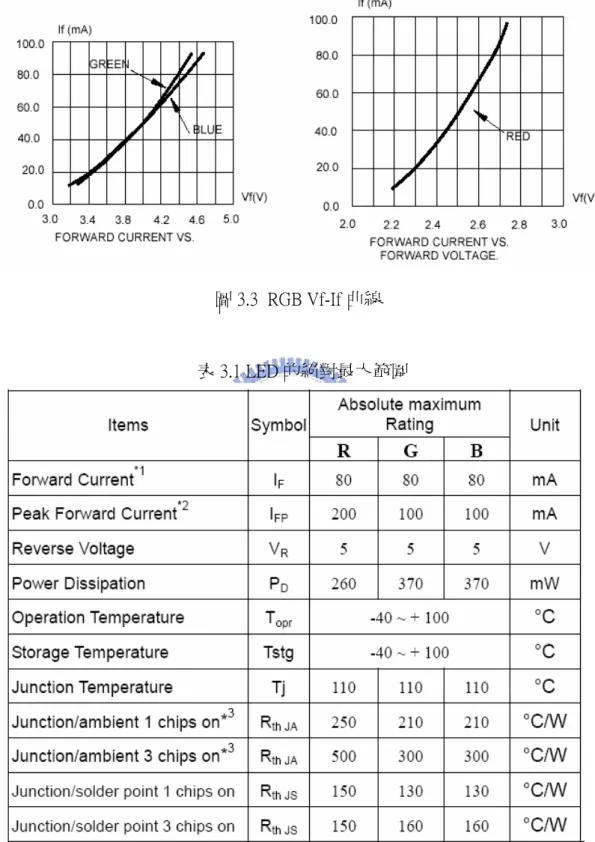
選用 COTCO 發光二極體,描述 120 度數 6.0*5.0 包裝為 SMT-LED 全彩水透明, 材料(AlGalnP&GaN),考慮到 LED 的尺寸圖 3.2 所示、RGB 電壓電流曲線圖 3.3 所示、絕對最大電氣規格表 3.1 所示與光電特性表 3.2 所示。 • 室內與室外的顯示 • 背光 • 照相機閃爍 • RGB全彩顯示 圖 3.2 尺寸敘述
圖 3.3 RGB Vf-If 曲線
表 3.2 典型電與光特性 此 LED 的 RGB Vf-If 曲線 是由順向電壓與順向電流組成,藍光與綠光的操作 電壓範圍由 3.4~4.4V 電流由 20~80mA,紅光操作電壓由 2.2~2.7V 電流由 20~80mA, 而此 LED 的絕對範圍部分中的 RGB 順向電流以 80mA 為上限,另一表 3.2 典型電 與光的的特性可看出發紅光時操作電流 50mA 時配合最大操作電壓 3.2V 可產生紅 光的主波長 612~625nm,發綠光時操作電流 50mA 時配合最大操作電壓 4.6V 可產 生紅光的主波長 514~534nm,發藍光時操作電流 50mA 時配合最大操作電壓 4.6V 可產生紅光的主波長 460~480nm。
3.2 LED陣列模組
本文LED陣列模組依背板的材質與大小分為64顆LED背板材質為FR與405顆 LED15吋 16:9背板材質為Al-MCPCB此3.3節會說明,LED排版間隔如下圖每顆LED 中心間隔都為12.4mm由圖3.4可得知此規劃,此間隔距離是由另模擬軟體計算的 知,64顆LED模組外加電壓為16.5V與405顆LED15吋外加電壓為111V。 圖3.4 LED排版間隔尺寸此模組主要是為了配合MBI1816 三色LED驅動電路而設計,其有考慮COTCO 元件特性與發光強度而得以下數據 VLED=16.5V、IGout (48mA) IRout (30mA) Ibout(24mA)且LED與LED中心間隙為2.54cm,其實際LAYOUT PC Board FR4。可 由圖3.5、圖3.6、圖3.7所示得知。 R15 110 G R B U15 COTCO_LP6_1 1 2 3 4 5 6 R16 10 G R B U24 COTCO_LP6_1 1 2 3 4 5 6 G R B U22 COTCO_LP6_1 1 2 3 4 5 6 8_i R12 110 18_o 5_i R2 220 4_o 11_o G R B U1 COTCO_LP6_1 1 2 3 4 5 6 9_o G R B U18 COTCO_LP6_1 1 2 3 4 5 6 14_o R14 220 G R B U13 COTCO_LP6_1 1 2 3 4 5 6 15_o R5 220 G R B U17 COTCO_LP6_1 1 2 3 4 5 6 R4 10 13_i 15_i G R B U2 COTCO_LP6_1 1 2 3 4 5 6 R3 110 10_o 2_o 6_i G R B U16 COTCO_LP6_1 1 2 3 4 5 6 R11 220 R1 10 R13 10 R18 110 G R B U21 COTCO_LP6_1 1 2 3 4 5 6 R7 10 4_i 14_i G R B U4 COTCO_LP6_1 1 2 3 4 5 6 R17 220 8_o R9 110 G R B U6 COTCO_LP6_1 1 2 3 4 5 6 R6 110 12_i G R B U14 COTCO_LP6_1 1 2 3 4 5 6 1_o 6_o G R B U7 COTCO_LP6_1 1 2 3 4 5 6 G R B U3 COTCO_LP6_1 1 2 3 4 5 6 G R B U12 COTCO_LP6_1 1 2 3 4 5 6 G R B U19 COTCO_LP6_1 1 2 3 4 5 6 16_o 10_i 18_i 2_i 12_o G R B U10 COTCO_LP6_1 1 2 3 4 5 6 G R B U5 COTCO_LP6_1 1 2 3 4 5 6 7_o G R B U8 COTCO_LP6_1 1 2 3 4 5 6 R10 10 3_i 11_i R8 220 1_i G R B U20 COTCO_LP6_1 1 2 3 4 5 6 9_i G R B U11 COTCO_LP6_1 1 2 3 4 5 6 13_o G R B U9 COTCO_LP6_1 1 2 3 4 5 6 G R B U23 COTCO_LP6_1 1 2 3 4 5 6 5_o 16_i 3_o 17_o 7_i 17_i 圖 3.5 64 PCS LED陣列驅動電路
圖 3.6 64 PCS LED陣列驅動電路LAYOUT
3.3 15吋LED背光模組
•LED擺設的設計圖3.8與材質MCPCB圖 3.9所示- -高導熱鋁基板(1.7Tmm 1/0 oz Cu
hot air solder leveling for solder pad SIZE: 270*150mm^2)。
• 溫度與發光均勻度量測圖 3.10 、圖 3.11所示-- The temperature of MCPCB will reach
60 oC and be stable。
• LED 背光光源結構圖 3.9所示。
Heat sink
Heat sink
Thermal
Thermal
couple
couple
Al holder
Al holder
plastic cover
plastic cover
(a) (b) 圖 3.9 15吋 LED 背光板使用 3in1(a)正面 (b)背面7624
7700
7550
7420
7700
7560
7160
7100
7330
圖 3.9 15吋 LED 背光光源測量出均勻度92 %0 10 20 30 40 50 0 10 20 30 40 50 60 70 Edge Center Top
T
e
mperat
ure
Time (min)
圖 3.10 15吋LED 背光板(MCPUB)溫度變化 Diffuser plate BEFIII X 1 DBEF-D400 LCD panel (~7.5% for NB) R: 33mA; G: 50 mA; B:27 mALED: 405 , pitch: 12.5mm
Reflector LED 圖 3.11 15吋 LED 背光光源結構表 3.3 15吋 LED 背光光源規格
280 (CW)
# of LEDs
0.3 ,0.3
Color
coordinate
~92%
Uniformity
20mm (not include heat sink)
Thickness
500 nit (CW, after panel)
Luminance
~105% NTSC standard
Color
saturation
62W (~282W for 32”)
Power
consumption
3in1 SMD (15 lm/W)
LED type
15 inch
Size
Values
Items
第 四 章
LED驅動設計
選Macroblock公司的MBI1816 固定電流LED 驅動IC他的功能是驅動LED發光 應用和開發精確性技術增加其輸出特性,而MBI1816輸出面16個調整電流端點和固 定電流降低用於驅動LEDs 內部Vf 大範圍變化。MBI1816提供使用者16通道固定電 流端去匹配LEDs 等效電流,使用者可調整輸出電流從5mA至60Ma取決於外部電阻 Rext,給使用者彈性控制LEDs光強度。另外,使用者可精確的調整LED亮度從0% 至100%經由外部OE外部脈波寬度調幅,可由圖4.1方塊圖。 圖 4.1 MBI1816方塊圖
表 4.1 MBI1816腳位敘述
圖 4.1 MBI1816方塊圖為此顆LED驅動IC的功能說明而表 4.1 為此顆IC的腳位 說明,GND為腳位接地、OUT0~OUT15為接LED元件控制驅動電流、OE為PWM 訊號輸入端、R-EXT為外接電阻改變電阻值能改變驅動電流、VDD為IC輸入驅動 電壓、Thermal Pad為功率射扇端連至地端。
4.1
應用電路
圖4.2所示MBI1816應用電路,這裡VLED 和VDD共為電壓訊號電壓源。圖4.3 所示MBI1816應用電路使用PWM信號變暗淡控制,這裡VLED 和VDD分別為使用電 壓源。
4.2 固定電流
在LED光源應用,MBI1816提供幾少不變電流從通道至通道和從IC至IC。下列 兩點可被實現: 1) 最大電流變化在兩者間通道是小於±3%,和兩者間ICs是小於±6%。 2) 此外,輸出端點電流特性是平坦和使用者可以參考下圖4.4所示,這輸出電流無 論如何可保持固定在於LED前制電壓Vf的變化。這裡保證LED被執行同一個亮度在 使用這的規範中。 圖 4.4 VDS-IOUT曲線• 設定輸出電流
每一個輸出電流(IOUT)的設定是由外部的設定﹐Rext。IOUT和 Rext兩者關係 如下圖4.5所示。
並且,輸出電流可從等示計算的知 : VR-EXT =1.24V;
Rext = (VR-EXT/IOUT)×59=(1.24V/ IOUT)×59
IOUT=(VR-EXT/ Rext)×59=(1.24V/ Rext)×59 在±6%誤差範圍內部
圖 4.5 Rext-Iout 曲線 • 負載供應電壓(VLED) MBI1816是設計運用於勝任於VDS實現固定電流。VDS與IOUT一起應該沒有 超出包裝功率射扇限制﹐PD(max)。 圖4.6所示﹐VDS=VLED-VF﹐和VLED是稱為負載供應電壓。假如VDS降低非常低 的電壓驅動值﹐PD(act)而最大值為PD(max)。 VDS= (VLED-VF)-VDROP
圖 4.6 負載電壓
首先是 每個output的電流差異量要小圖4.7, 我們說Bit skew要低於 +-3%,甚至 要求做到更低, 再來IC與IC間的電流差異量要小.所以,我們會要求 Chip skew要低於 +-10%,甚至要求做到低於 +-6%。
4.3 RGB驅動電路
使用三個MBI1816 LED Driver 去限定LED (R、G、B)驅動電流,如下計算式, 其VLED為陣列LED的總驅動電壓,G-EXT 、R-EXT、 B-EXT稱外部電阻功能是 經由設定可限定LED固定電流,在此LED三色固定電流限定為IGout (48mA) IRout (30mA) Ibout(24mA),圖 4.7、圖 4.8所示為實際電路與LAYOUT。
計算式: VLED=16.5V G-EXT=1.5K R-EXT=2.4K B-EXT=3K IOUT=(VR-EXT/Rex)*59=(1.24V/Rext)*59+/-0.6% IGout 0.048773333 IRout 0.030483333 IBout 0.024386667 RGB Current measurement R1 R2 R3
30.3mA 30.42mA 30.36mA G1 G2 G3
47.31mA 47.22mA 47.37mA B1 B2 B3
R49 1k 0 OE2 C2 1n J5 CON16 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 0 +5V C1 1n OE2 0 OE3 +5V J3 CON16 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 U65 MBI1816-1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 19 20 17 18 GND R-EXT OUT0 OUT1 OUT2 OUT3 OUT4 OUT5 OUT6 OUT7 OUT8 OUT9 OUT10 OUT11 OUT12 OUT13 OE VDD OUT14 OUT15 0 0 0 U66 MBI1816-1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 19 20 17 18 GND R-EXT OUT0 OUT1 OUT2 OUT3 OUT4 OUT5 OUT6 OUT7 OUT8 OUT9 OUT10 OUT11 OUT12 OUT13 OE VDD OUT14 OUT15 U67 MBI1816-1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 19 20 17 18 GND R-EXT OUT0 OUT1 OUT2 OUT3 OUT4 OUT5 OUT6 OUT7 OUT8 OUT9 OUT10 OUT11 OUT12 OUT13 OE VDD OUT14 OUT15 OE1 J4 CON4 1 2 3 4 +5V 0 OE3 R66 1k J6 CON16 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 +5V C4 1n OE1 R83 1k C3 1n 圖 4.7 MBI1816 RGB LED驅動電路 (a) (b)
第 五 章
顏色與溫度感測模組
大部份的量測是從一個轉換器(converter)開始,亦即一種可將感應器測量的到如 溫度、應變、加速度的物理量轉換為電子信號裝置。感應器有許多各式各樣不同 的量測範圍及外形規格。訊號處理器包含放大、濾波、差動應用、絕緣、同步取 樣、電流轉換電壓、電壓轉換頻率、線性化項目等。5.1
顏色模組的尺寸
此顏色感測模組應用開回路顏色識別和閉回路顏色點控制是為理想,其有特別 的感光度響應用於 RGB-LED 背光源,這感測器有好的偵測能力在於光輸出色度漂 移,當使用閉回路回授控制可管理背光系統實現好的 du'v'性能。所以此感測器 應用包括白點的控制在於放射性顯示,環境的光線,工業處理顏色控制等。 選用安捷倫型號 HDJD-S831-QT333 顏色感測模組,此顏色感測是高效能、小 尺寸、價錢便宜、高效率的光電轉換感測器。這感測結合一個光二極體陣列和三 個阻抗放大器而信號整體於 CMOS IC 來處理。光二極體陣列過濾紅綠藍顏色,這 感測轉換 RGB 光變成類比電壓輸出,以 VBOUT、VGOUT 和 VROUT 分別表示表 5.1 所示。這感應器是被用於 5V 供應和內部 5V 至 3.3V 電壓調整器。一個顏色感 應器組成顏色感應模組封裝用 5x5x2[mm]架置 QFN-16 圖 5.1、圖 5.2、圖 5.3 所示, 平面可彎曲的連接器和減低耦合電容架設於 PCB 板上圖 5.4 所示。圖 5.1 封裝尺寸正面
圖 5.2 封裝尺寸側面
圖 5.4 PCB layout
表 5.1 平面電線聯接腳位
Pin Name Description
1 VDD5 5V DC Supply
2 GND Ground
3 VBOUT Analog Output Voltage for Blue
4 VGOUT Analog Output Voltage for Green
5 VROUT Analog Output Voltage for Red
5.2 顏色模組運用原理
此模組感測光線下降,整合了RGB顏色過濾器並加上光二極體陣列偵測RGB 組成,這光二極體轉換紅綠藍光線變為光電流,這整合傳輸阻抗放大器做用是RGB 組成轉換為光電流再轉為類比電壓的輸出圖5.6所示。此電壓的輸出取決於RGB各 通道增加光線線性度的強弱圖5.7所示。 圖 5.6 SENSOR IC 方塊 圖 5.7 典型的特徵 波長-光強度 、TA-VD5.3 實際光電轉換量測
• 目的:
驗證8-Bit PWM模組功能與COLOR SENSOR讀取是否正常。
• 程序: 1. 建立一新軟體專案,其中只包含作業系統程式與8組PWM驅動程式。 2. 每組PWM訊號頻率皆設定為500Hz。 3. 設定Duty為0 %~100%。 4. 重新編譯軟體專案,並下載至微控制器中。 5. 利用示波器,觀察PWM訊號圖5.8點1所示是否正常。 6. 分別設定Duty為0%~100%,且同時量COLOR SENSOR訊號圖5.8點2所示, 如表5.2、表5.3、表5.4 為安捷倫顏色感測模組,如表5.5、表5.6、表5.7為 HAMAMATSU顏色感測模組所示 。 • 注意事項:
本文規劃採用8-Bit PWM Module,且根據【17】,Duty Register值域範圍為0 ~ 100。當Duty 50%,Duty Register可設成50,剛好無Quantization Error產生。所以PWM 輸出訊號之Duty需有一定水準的準確度。 COLOR SENSOR A/D INPUT A/D INPUT A/D INPUT EVM 68HC12 PWM OUTPUT 2K Ω 2K Ω 2K Ω 50 n f 50 n f 50 n f 1 2 3 圖 5.8 感測訊號檢測點
表 5.2 PWM訊號、安捷倫的顏色模組讀取值(GB)且經低通濾波電路比較
DUTY EVM PWM(RGB) COLOR SENSOR(GB) LOW FILTER
90 80 70 60 50 40 30 20 10
表 5.3 PWM訊號、安捷倫的顏色模組讀取值(R)且經低通濾波電路比較
DUTY EVM PWM(RGB) COLOR SENSOR(R) LOW FILTER
90 80 70 60 50 40 30 20 10
表 5.4 安捷倫的顏色感測模組由PC端讀取到AD的值
DUTY(%) VR_AD VG_AD VB_AD 背板溫度(℃)
90 363 594 595 49 80 342 532 531 46 70 321 469 468 39 60 259 345 348 34 50 223 290 292 30 40 189 235 235 26 30 108 128 128 25 20 71 80 80 23 10 34 39 39 23 00 2 2 1 23
由 EVM 輸 出 PWM 訊 號 控 制 LED 驅 動 IC 去 讓 LED 陣 列 發 光 在 經 由 COLOR SENSOR讀取值波形,再經低通濾波器訊號濾成平穩的直流電壓值如表5.3所示為 綠與藍光而表5.2所示為紅光,再將訊號透過類比轉數位轉換得表5.4所示。
• 注意事項:
表 5.5 PWM訊號與HAMAMATSU的顏色感測模組讀取比較
DUTY (RGB) EVM PWM COLOR SENSOR
90 80 70 60 50 40 30 20 10
表 5.6 HAMAMATSU的顏色感測模組讀取值在經低通濾波器訊號比較
DUTY (RGB) COLOR SENSOR O TO E COLOR SENSOR TO Low Filter
90 80 70 60 50 40 30 20 10
表 5.7 HAMAMATSU的顏色感測模組由PC端讀取到AD的值
DUTY(%) VR_AD VG_AD VB_AD 背板溫度(℃)
90 16 17 16 44 80 35 55 35 43 70 69 82 73 42 60 187 218 191 40 50 247 275 253 38 40 307 328 313 36 30 436 440 439 34 20 494 496 497 33 10 564 555 567 32 00 613 613 613 32
由 EVM 輸 出 PWM 訊 號 控 制 LED 驅 動 IC 去 讓 LED 陣 列 發 光 在 經 由 COLOR SENSOR讀取值波形如表5.5所示,再經低通濾波器訊號濾成平穩的直流電壓值如 表5.6所示,再將訊號透過類比轉數位轉換得表5.7所示。
• 注意事項:
5.4 溫度感測
發光二極體是由半導體材料所形成之元件,其發光原理為施加電壓於半導體 化合物上,在電子和電洞對結合而釋放能量,而散熱優良與否決定了LED元件工作 效率,以晶片放光為例其發光效率隨溫度增加而下降滑,但對LED整體構裝效能與 使用壽命來說,高熱依舊是LED的致命傷,因為如何有效導引LED發光所產生之熱 量急於解決的問題。 選用久君(JOYIN.COM.TW)公司的熱敏電阻(Thermistor)此特性為負溫度系數 (NTC),而圖5.9所示輸入電壓值由10K電阻與熱敏電阻分壓再經一階RC濾波得壓 降進入68HC12 EVM Board 輸入A/D,PC端顯溫度情況圖5.10所示,下列為此元件 的特性。型號 : JTD503 R25 ℃= 50KΩ B25~85 =4055
J1 CON1 1
-40~85 C
RT1 THERMISTOR 1 2+5V
C1 0.1u 1 2 R2 220 2 1 R1 10k 2 1 圖 5.9 溫度分壓感測電路圖• 參數計算 以下元件電阻值、經電阻分壓值、轉成A/D值可由元件特性公式計算得知,如 表5.5所示。 表 5.5 JTD503 特性值 溫度(℃) 元件電組值 經電阻分壓值(V) 轉成A/D值(COUNT) 0 173.8373877k 4.728 968.2944 5 133.0827866k 4.650551955 952.4330404 10 102.8490483k 4.556930249 933.259315 15 80.19823973k 4.445665457 910.4722856 20 63.06909672k 4.315716189 883.8586755 25 50k 4.166666667 853.3333334 30 39.94401063k 3.998878957 818.9704104 35 32.14396989k 3.813590648 781.0233647 40 26.04724544k 3.612931463 739.9283636 45 21.24693782k 3.399843201 696.2878876 50 17.44093486k 3.177904643 650.8348709 55 14.40312697k 2.95108225 604.3816448 60 11.96298899k 2.723442833 557.7610922 65 9.990971902k 2.498870978 511.7687763 70 8.387964572k 2.280830089 467.1140022 75 7.077631412k 2.072193515 424.3852319 80 6.000798714k 1.875155992 384.0319472 85 5.1113k 1.69121783 346.36
• 程式撰寫
我以結構的概念建立溫度對應表,在取內差計算的方式算得出各溫度間的斜 率,原理是讀取A/D值對應此表溫度範圍而其再以斜率值算出實際溫度值。 static void Calculate_Temperature(void)
{ struct tab_temperature_struct { int atod; int temperature; float temperature_atod_ratio; };
struct tab_temperature_struct tab_temperature[TAB_TEMPERATURE_SIZE] = { {968,0,-31.25}, {952,5,-26.3157894}, {933,10,-21.7391304}, {910,15,-19.2307692}, {884,20,-16.1290322}, {853,25,-14.7058823}, {819,30,-13.1578947}, {781,35,-12.1951219}, {740,40,-11.3636363}, {696,45,-11.1111111}, {651,50,-10.6382978}, {604,55,-10.8695652}, {558,60,-10.8695652}, {512,65,-11.1111111}, {467,70,-11.6279069},
{424,75,-12.5}, {384,80,-13.1578947}, {346,85,0} }; int i; if (CLT_AD > 968) { TEMPERATURE = 0 ; }
for (i=0; i<TAB_TEMPERATURE_SIZE; i++) {
if(CLT_AD>=tab_temperature[i].atod) {
TEMPERATURE = tab_temperature[i].temperature + (((CLT_AD - tab_temperature[i].atod) * tab_temperature[i].temperature_atod_ratio) / 100); break; } } if (i== TAB_TEMPERATURE_SIZE) { TEMPERATURE=tab_temperature[TAB_TEMPERATURE_SIZE-1].temperature ; } }
圖 5.10 PC端診斷程式 • 量測誤差比 我以電表讀取值與Thermistor轉換的壓降值做比較得出,表5.6所示。 表 5.6 THERMISTOR 與電表對應值 電表 65℃ 60℃ 55℃ 50℃ 45℃ 40℃ 35℃ 30℃ 25℃ 20℃ A/D 487 524 602 653 703 741 786 827 854 879 量測到溫度 67℃ 63℃ 55℃ 50℃ 44℃ 40℃ 35℃ 29℃ 25℃ 21℃
第 六 章
整合背光模組系統
此系統整合了七項模組圖 6.1所示分別為電源功應器、PC、微控制器、LED 驅 動模組、64PCS LED陣列模組、COLOR SENSOR 模組與低通濾波器,其各微控制 器與模組上幾節都有談到, 現敘述PC端調校程式其功能為下圖6.2所示通訊由 RS232與EVM做訊號連結,實際背光系統圖6.5所示。E V M
6 8 H C 1 2 C O T C O A R R A Y L E D M B I1 8 1 6 D R IV E R L F C O L O R S E N S O R D C 1 6 .5 V D C 5 V R S 2 3 2 5 0 -p in in te r fa c e c a b le P W M L F T E M P E R A T U R E S E N S O R A /D A /D 圖 6.1 背光模組系統6.1 PC端調校程式設計
本文之PC端調校程式主體核心沿用Pixcal調校工具圖6.2所示,核心通訊程式與 人機界面並無修改,通訊協定採用RS232,Baud Rate為19.2kbps,詳細的Pixcal調校 工具功能與人機界面使用方式。本文主要修改處在於改善調校參數的維護流程, 以應對系統發展時常需新增或移除調校參數的需求,增加可自動產生調校參數的C Files、Header Files與MATLAB M-File等三項新功能,以供Target端程式所用,減少人 為維護修改所可能導致的錯誤。
6.2 TARGET端調校程式設計
• 通訊程式初始化 本文之調校程式所採用的通訊界面為RS232,本文之Target端以MC9S12之SCI 模組為通訊界面,Baud Rate為19.2Kbps,暫存器設定為SCI0BDH=0,SCI0BDL=78。 在MCU開機時,SCI通訊模組得先進行初始化,以設定與啟動SCI通訊裝置。 程式原始碼之SC_Init()。 • 通訊程式主體 應用於本文之Target端通訊程式原始碼記載,其中RS232ISR()為通訊核心程式 的進入點。RS232ISR()為一中斷服務程式,為求減低中斷延遲,此中斷服務程式 清除中斷遮罩(CLI()),以讓其餘更緊急的中斷要求,在執行RS232ISR()時仍可被執 行。 • 資料錄取(Data Logging)為了實現變數之同步化Data Logging,Target端的Data Logging函式的執行頻 率,需與變數之更新頻率相同,目前系統變數之更新頻率為100Hz,所以Data Logging函式亦需被100Hz的任務所呼叫,關於作業系統任務排程的相關資料。Data Logging函式請參照之SCDataLogRtn()原始碼。 •參數的設定如下 1. K_PWMDTY1~K_PWMDTY8 (輸入DUTY 0~100值可做調整) 2. VR_AD、VG_AD、VB_AD (讀取A/D值) 3. K_REFVR、K_REFVG、K_REFVB (輸入A/D值做回授基底) 上示參數幾個參數在圖 6.4所示皆有用到且可知做用。
6.3 顏色感測回授控制
由COLOR SENSOR讀取的光電轉換值如表所示RGB類比轉數位值,與Target 端調校程式預先設定值做比較,所以設定值與sensor的A/D值做比較,若大於設定 值就控制PWM訊號增加DUTY的值,其小於設定值就控制PWM訊號減少DUTY的 值,這樣可由COLOR SENSOR讀取的類比轉數位值做光回授的控制圖6.4所示。 • 程式控制方塊 (a) (b) 圖 6.3 (a)背光源各控制項目 (b)光回授控制方塊圖背光源控制項目包含(1)顏色的控制(2)光強度的控制(3)PWM DUTY 控制如圖 6.3(a)所示,而顏色的控制是單一調整 PWM DUTY (%)由RGB三色混合光以比例混 成各種顏色、光強度調整為同時增減PWM DUTY (%)。 圖6.3(b) 所示控制系統包括MCU之PWM控制器、LED驅動電路、LED背光板、 光強度感測訊號、低通濾波電路做光回授運作,而系統控制概述背光微控制器(User interface、Transformation、PI(s) 、GPC(s) 、PWM(s) )同步連結運作一開始送出PWM
訊號控制LED驅動電路(LED drivers Gd(s))調整電流源使LED背光板發光(RGB
Lamp Gl(s)),而光強度感測訊號(Optical coupling CXYZ(s) 、Photo diodes Gpd(s))值
經由低通濾波(Low pass filters Glp(s))再回微控制器做處理與分析,再傳送PWM訊
• 程式部分的撰寫流程 1 START AD TO REF =1 Brightness + =1 K_REFVR = VR_AD K_REFVG = VG_AD K_REFVB = VB_AD 1 false true 2 2 RGB PWM <100 R G B PWM + 1 false false true true Brightness - =1 2 3 3 RGB PWM >0 R G B PWM - 1 false false true true
Feedback On = 1 3 4 4 R PWM <100 R G B PWM + 1 false false true true
errorVR = VR_AD - K_REFVR errorVG = VG_AD - K_REFVG errorVB = VB_AD - K_REFVB
errorVR > K_FdbkMIN && errorVR <613 4 4 true false 4 5 R PWM >0 R PWM - 1 false true errorVR < -K_FdbkMIN && errorVR >-613 5 5 true false 5 6 G PWM <100 G PWM + 1 false true errorVG > K_FdbkMIN && errorVG < 613 6 6 true false
6 7 G PWM >0 G PWM - 1 false true errorVG < -K_FdbkMIN && errorVG > -613 7 7 true false 7 8 B PWM < 100 B PWM + 1 false true errorVB > K_FdbkMIN && errorVB < 613 8 8 true false 8 end B PWM >0 B PWM - 1 false true errorVB < -K_FdbkMIN && errorVB >-613 end end true false 圖 6.4 程式撰寫回授流程圖