國 立 交 通 大 學
土 木 工 程 研 究 所
碩 士 論 文
應用衛星影像辨識與河道水理演算於濁水溪沖積扇
地下水數值模擬
Applying Satellite Image Identification Technology
and River Channel Routing Module to
Groundwater Simulation of Chou-Shui River
研 究 生 : 楊深惠
指導教授 : 張良正 博士
應用衛星影像辨識與河道水理演算於濁水溪沖積扇
地下水數值模擬
Applying Satellite Image Identification Technology
and River Channel Routing Module to
Groundwater Simulation of Chou-Shui River
研 究 生:楊深惠
Student:Shen H. Yang
指導教授:張良正 博士 Advisor:Dr. Liang C. Chang
國 立 交 通 大 學
土 木 工 程 學 系 碩 士 班
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering
National Chiao Tung University
in Partial Fulfillment of Requirements
for the Degree of
Master of Science
in
Civil Engineering
June 2012
Hsinchu, Taiwan, Republic of China
I
應用衛星影像辨識與河道水理演算於濁水溪地下水
數值模擬
學生:楊深惠 指導教授:張良正 博士 國立交通大學土木工程研究所摘要
濁水溪沖積扇為台灣地區最重要的地下水區之一,因此以往已有不少 濁水溪沖積扇相關地下水數值模擬之研究,惟多未對濁水溪本流與沖積扇 地下水系統間之交換進行較深入之探討。因此,為了提昇對濁水溪本流對 區域地下水影響之掌握,本研究以河道模擬演算及衛星影像辨識,分別估 計濁水溪之河水位高程與河道水面範圍變化,以作為地下水數值模式中河 道模組(RIV package)之關鍵參數,並以 RIV package 探討濁水溪本流與沖 積扇地下水系統間之交換關係。在河道水理演算部分,本研究以 2008 年之 彰雲大橋、西濱大橋、自強大橋及溪州大橋之月平均水位資料與月平均流 量資料,及 2007 年 12 月之河川量測斷面進行河道水理模式之設定與檢定, 並模擬全河道之水位。在影像辨識部分,分別以 2008 年一月、七月與十一 月之福衛二號多光譜之衛星影像圖,並採其中之近紅外光波段作為辨識河 道之依據。 研究結果顯示,在河道水理演算方面,濁水溪下游之西濱大橋,其水 深於枯水期與豐水期時水深為 0.3 及 1.7 公尺,相差 1.4 公尺;而在濁水溪 上游彰雲橋水深較深,其枯水期與豐水期時水深為 2.2 及 0.2 公尺,豐枯水 期水深相差至 2 公尺。衛星影像辨識發現,濁水溪於 2008 年一月、七月與 十一月之辮狀河道面積分別為 18.95、31.08 與 17.51 平方公里,枯水期之II 河道面積約僅佔豐水期面積之 60%,綜合前述,豐水期有較高之河水位與 河道面積且與估水期差距甚大。而地下水數值模式方面,則推估出濁水溪 之河川入滲量為每年 5.26 億噸、河川出滲量為每年 1.12 億噸、整體沖積扇 之補注量為每年 20.23 億噸,抽水量為每年 19.3 億噸,比較各種相關研究 文獻,顯示此抽水量值應屬合理範圍。
III
Applying Satellite Image Identification Technology
and River Channel Routing Module to
Groundwater Simulation of Chou-Shui River
Student:Shen-Hui Yang Advisor:Dr. Liang-Cheng Chang Department of Civil Engineering
National Chiao Tung University
Abstract
Many groundwater simulation models have been developed for Chou-Shui River alluvial fan, one of the most important groundwater area. However, the exchange between Chou-Shui River and the groundwater system of the alluvial fan is much less studied. This exchange is evaluated using a river package in the groundwater simulation model. Several critical parameters used in the river package are determined using the relationship between the river water level and the area of river flow surface. This relationship is evaluated by satellite image technology. The river package is calibrated using the monthly average water level data and the monthly average flow data of year 2008 at Chang-Yun Bridge, Xi-Bin Bridge, Chi-Chiang Bridge and Si-Jou Bridge. The field measurement of the cross-section in December 2007 is used in the river package. For calibration of satellite image technology, the FORMOSAT multispectral satellite images of January, July, and November in 2008 are used. The Infrared light is used to identify the river channel.
The results show that the water level differences between wet and dry periods are 1.4m and 2.0m for Xi-Bin Bridge station and Chang-Yun Bridge station respectively. Specifically, 0.3m during dry period and 1.7m during wet period at Xi-Bin Bridge station and 0.2m during dry period and 2.2m during
IV
wet period at Chang-Yun Bridge station. The identified areas of the braided channel in Chou-Shui River using the satellite image technology are 18.95, 31.08, and 17.51 km2 in January, July, and November of year 2008 respectively. The area during the dry periods is about 60% of the area during the wet periods. The exchange rates between the river and the groundwater system are 526 million cubic meters and 112 million cubic meters for flowing out and into the river. The total recharge is 20.23 million cubic meters. The pumping rates is 19.3 million cubic meters.
V
謝誌
感謝吾師張良正教授對於本論文之指導及研究生涯中對學生工作態度 及學問研究之啟發,使學生受益匪淺。另承蒙口試委員 劉說安教授、江崇 榮副所長、徐年盛教授及蕭金財副教授在口試前細心審閱學生的論文,並 於口試期間給予保貴之意見,使得本文更趨於完備,在此謹致衷心謝意。 另外必須在此特別感謝陳宇文學長於研究期間全程參與及指導本論文 之撰寫,也感謝蔡瑞彬學長的鼎力相助,還有張老師研究室所有成員的陪 伴及互相幫助。 最後感謝家人在精神上的支持,讓我得以順利取得碩士學位。VI
目錄
摘要 ... I Abstract ... III 謝誌 ... V 目錄 ... VI 第一章 前言... 1 1.1 研究動機 ... 1 1.2 研究目的 ... 2 1.3 研究流程 ... 2 第二章 文獻回顧 ... 6 2.1 地下水數值模式 ... 6 2.1.1 地下水數值模式 ... 6 2.1.2 參數檢定 ... 9 2.2 河道水理演算 ... 11 2.3 衛星影像與衛星影像辨識 ... 11 第三章 理論敘述 ... 13 3.1 地下水數值模擬與參數檢定 ... 133.1.1 MODFLOW 之河川套件(River package)簡述 ... 13
3.2 HEC-RAS 河道定量流演算 ... 18 3.3 衛星影像河道辨識 ... 24 3.3.1 遙測基本原理 ... 24 3.3.2 遙測載具 ... 25 3.3.3 衛星遙測資料之特性 ... 28 第四章 濁水溪本流與區域地下水互動模式建置 ... 31
VII 4.1 研究區域 ... 31 4.2 應用 HEC-RAS 於濁水溪河水位模擬 ... 35 4.2.1 HEC-RAS 模式說明與參數設定 ... 35 4.2.2 模式參數設定 ... 36 4.3 應用衛星影像辨識於濁水溪河道面積 ... 49 4.4 濁水溪沖積扇地下水數值模式建置 ... 55 4.4.1 地下水分層架構、邊界條件與格網劃分 ... 55 4.4.2 模式輸入資料 ... 62 4.5 參數檢定結果 ... 73 4.5.1 手動微幅調整水文地質架構 ... 74 4.5.2 專家系統參數檢定 ... 81 4.6 水平衡分析 ... 85 第五章 結論與建議 ... 100 5.1 結論 ... 100 5.2 建議 ... 101 參考文獻 ... 102 附錄 A 各觀測井之水力傳導係數資料 ... 106 附錄 B 修正型水位歷線法 ... 108
VIII
表目錄
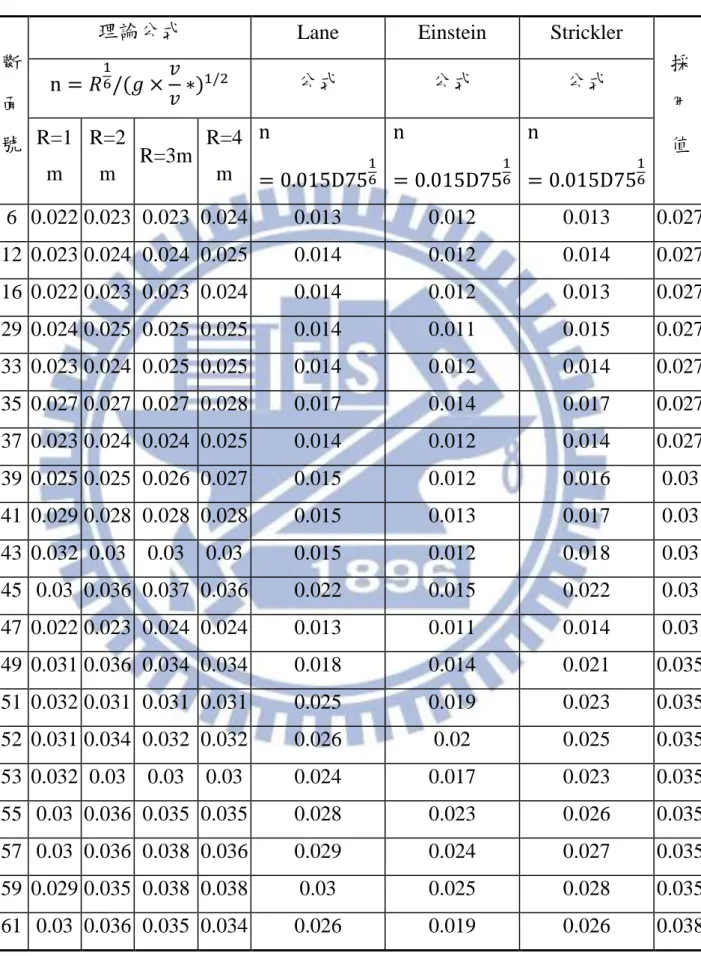
表 1.3-1 濁水溪沖積扇補注量相關研究比較(資料來源:經濟部水利署) ... 7 表 3.2-1 束縮與擴張係數表 ... 22 表 3.3-1 電磁波波譜 ... 24 表 3.3-2 福爾摩沙衛星二號之遙測酬載儀器規格 ... 27 表 3.3-3 福衛二號影像及相關參數 ... 28 表 4.2-1 濁水溪本流各河段曼寧 n 值計算成果表 ... 39 表 4.2-2 彰雲橋 2008 年月平均流量表 ... 41 表 4.2-3 芳苑站月平均潮位高程表 ... 42 表 4.3-1 各段河道濕潤區之面積及等效河寬 ... 54 表 4.4-1 各斷面及各月份之模擬水位 ... 69 表 4.4-2 濁水溪一月相對應之網格內面積 ... 72 表 4.6-1 濁水溪入滲與出滲量統計表 ... 87 表 4.6-2 各層抽水量統計表 ... 93IX
圖目錄
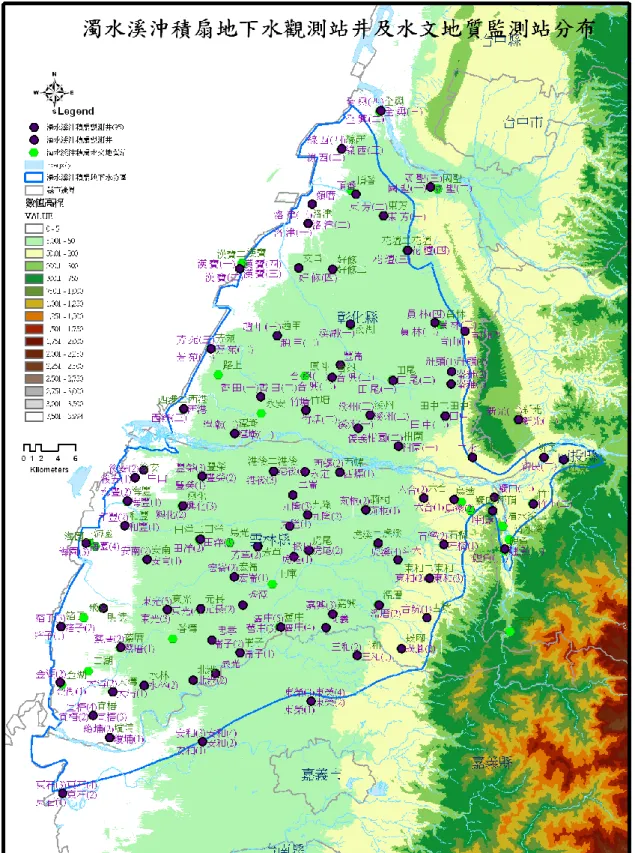
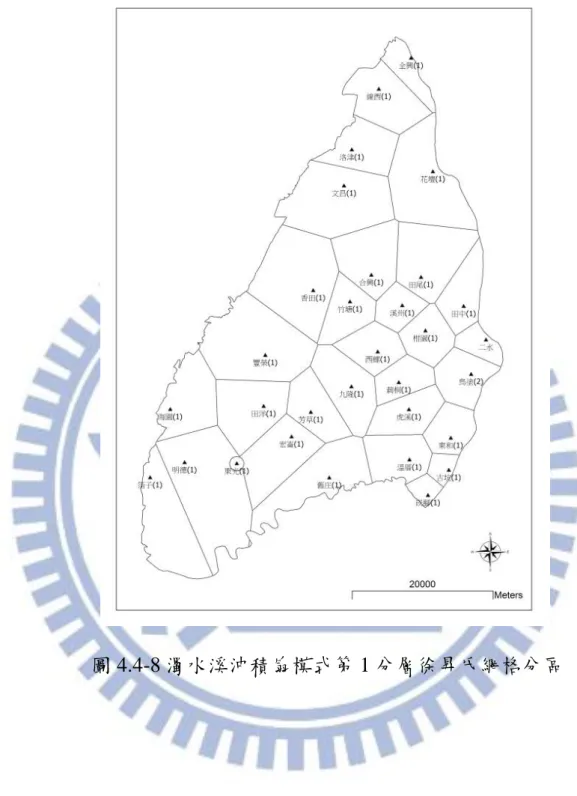
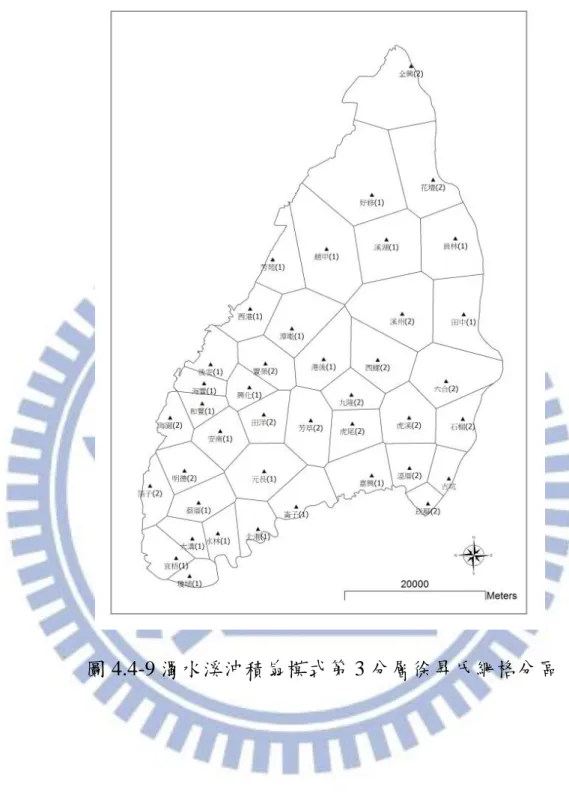
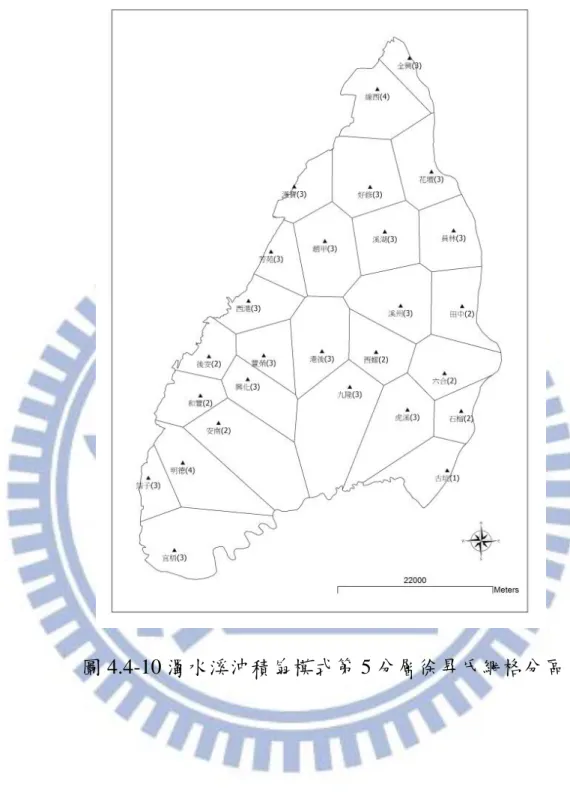
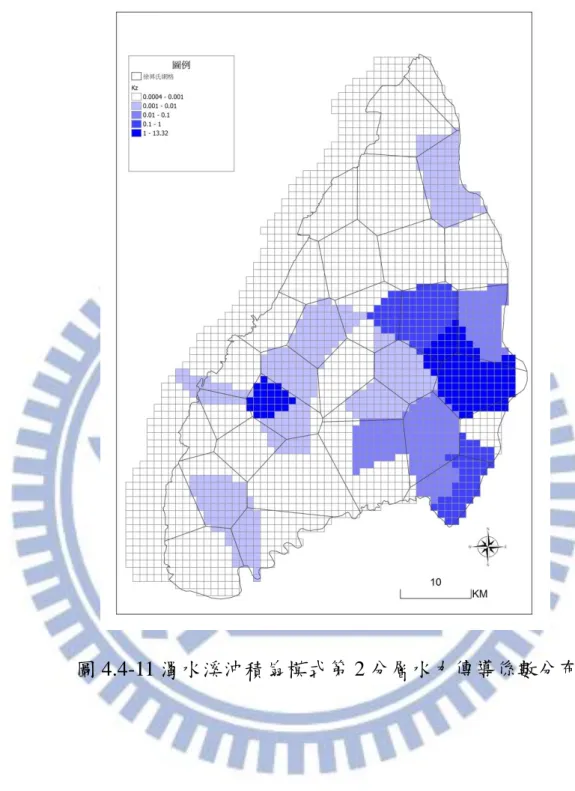
圖 1.3-1 地下水系統水平衡關係圖 ... 3 圖 1.3-2 研究流程圖 ... 4 圖 1.3-3 數值模式參數檢定流程圖 ... 5 圖 3.1-1 河川入滲機制示意圖 ... 14 圖 3.1-2 參數檢定流程圖 ... 15 圖 3.2-1 能量方程式示意圖 ... 20 圖 3.2-2 河川上下游斷面間距之定義 ... 21 圖 3.2-3 動量方程式示意圖 ... 23 圖 3.3-1 植物、水及土壤在不同波長的輻射反應 ... 25 圖 4.1-1 濁水溪沖積扇水文地質剖面圖(海園至石榴) ... 32 圖 4.1-2 濁水溪沖積扇地下水觀測網站井分布圖 (繪製於民國 98 年) ... 34 圖 4.2-1 濁水溪流域系統圖 ... 35 圖 4.2-2 HEC-RAS 模擬流程 ... 36 圖 4.2-3 斷面 1 之河川斷面圖 ... 37 圖 4.2-4 斷面 45 之河川斷面圖 ... 37 圖 4.2-5 斷面 86 之河川斷面圖 ... 38 圖 4.2-6 濁水溪底床剖面圖 ... 38 圖 4.2-7 彰雲橋 2008 年月平均流量圖 ... 40 圖 4.2-8 斷面 86、斷面 87 及彰雲橋水位站位置關係圖 ... 43 圖 4.2-9 斷面 86 及斷面 87 剖面圖 ... 43 圖 4.2-10 濁水溪一月模擬水位與觀測水位 ... 45 圖 4.2-11 濁水溪四月模擬水位與觀測水位 ... 45 圖 4.2-12 濁水溪七月模擬水位與觀測水位 ... 46X 圖 4.2-13 濁水溪十月模擬水位與觀測水位 ... 47 圖 4.2-14 彰雲橋觀測水位與模擬水位時序比較圖 ... 47 圖 4.2-15 溪州大橋觀測水位與模擬水位時序比較圖 ... 48 圖 4.2-16 自強大橋觀測水位與模擬水位時序比較圖 ... 48 圖 4.2-17 西濱大橋觀測水位與模擬水位時序比較圖 ... 49 圖 4.3-1 一月濁水溪上游衛星影像圖 ... 50 圖 4.3-2 四月濁水溪上游衛星影像圖 ... 50 圖 4.3-3 七月濁水溪上游衛星影像圖 ... 51 圖 4.3-4 十一月濁水溪上游衛星影像圖 ... 51 圖 4.3-5 四季河道行水濕潤區域重疊圖 ... 52 圖 4.3-6 四季之河道濕潤區面積 ... 53 圖 4.4-1 地層柱狀圖分部位置 ... 56 圖 4.4-2 濁水溪沖積扇水文地質架構概念分層 ... 56 圖 4.4-3 濁水溪沖積扇地下水邊界之概念圖 ... 57 圖 4.4-4 濁水溪沖積扇模式之格網劃分 ... 59 圖 4.4-5 濁水溪沖積扇模式第 1 分層格網劃分 ... 60 圖 4.4-6 濁水溪沖積扇模式第 2~5 分層格網劃分 ... 61 圖 4.4-7 濁水溪沖積扇模式第 49 列格網劃分剖面圖 ... 61 圖 4.4-8 濁水溪沖積扇模式第 1 分層徐昇氏網格分區 ... 63 圖 4.4-9 濁水溪沖積扇模式第 3 分層徐昇氏網格分區 ... 64 圖 4.4-10 濁水溪沖積扇模式第 5 分層徐昇氏網格分區 ... 65 圖 4.4-11 濁水溪沖積扇模式第 2 分層水力傳導係數分布 ... 66 圖 4.4-12 濁水溪沖積扇模式第 4 分層水力傳導係數分布 ... 67 圖 4.4-13 濁水溪沖積扇及其對應之斷面 ... 69
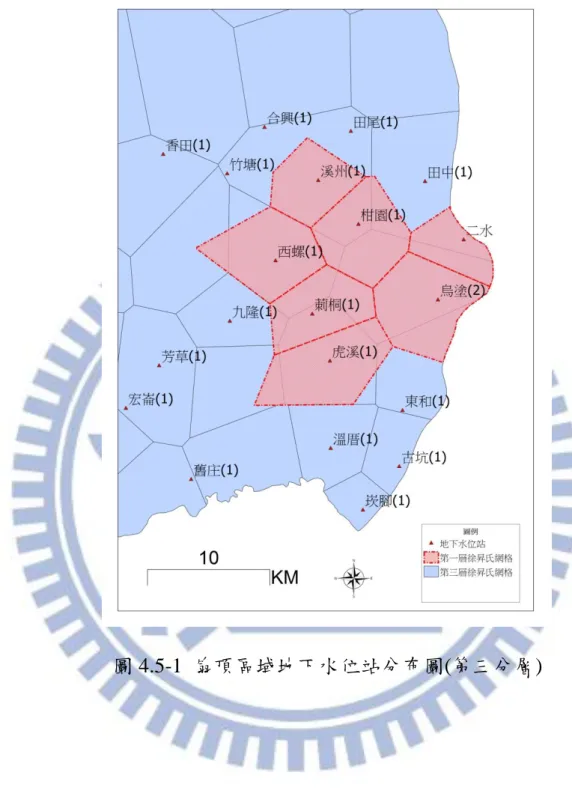
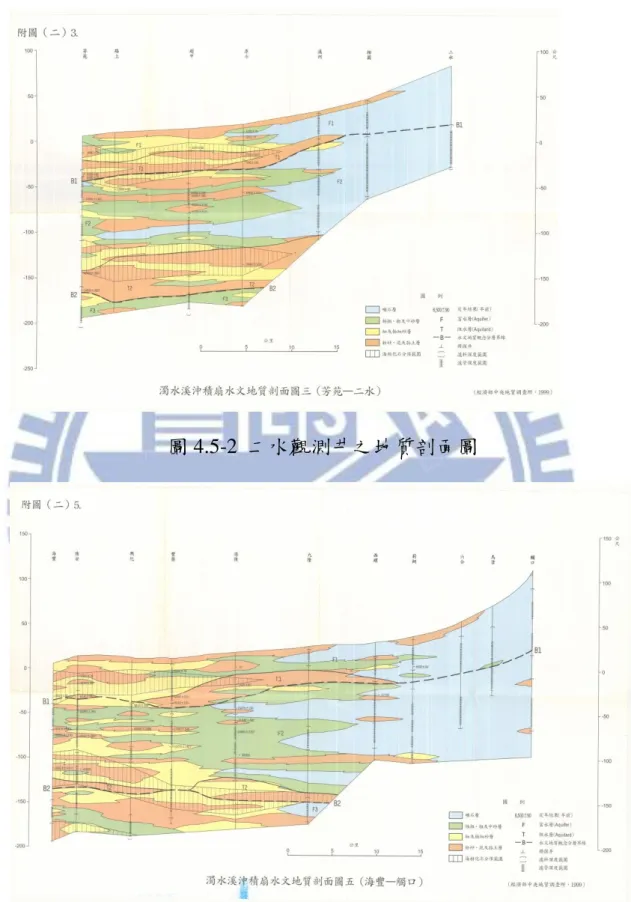
XI 圖 4.5-1 扇頂區域地下水位站分布圖(第三分層) ... 75 圖 4.5-2 二水觀測井之地質剖面圖 ... 76 圖 4.5-3 烏塗、六合觀測井之地質剖面圖 ... 76 圖 4.5-4 烏塗岩心柱狀圖 ... 77 圖 4.5-5 六合岩心柱狀圖 ... 77 圖 4.5-6 烏塗、六合(2)及二水觀測水位圖 ... 78 圖 4.5-7 濁水溪沖積扇模式第 2 分層水力傳導係數分布 ... 79 圖 4.5-8 海園(3)與鄰近水井之地下水位變化圖 ... 80 圖 4.5-9 模式定水頭邊界條件分布圖(第五分層) ... 81 圖 4.5-10 觀測水位與檢定水位之等值圖(第一分層 2006 年 6 月份) ... 82 圖 4.5-11 觀測水位與檢定水位之等值圖(第三分層 2006 年 6 月份) ... 83 圖 4.5-12 觀測水位與檢定水位之等值圖(第五分層 2006 年 6 月份) ... 84 圖 4.5-13 觀測水位與檢定水位檢定關係圖 ... 85 圖 4.6-1 濁水溪各月入滲量變化圖 ... 88 圖 4.6-2 濁水溪各月出滲量變化圖 ... 88 圖 4.6-3 彰雲橋觀測水位 ... 89 圖 4.6-4 二水觀測井之地下水位 ... 89 圖 4.6-5 一月河川出滲與入滲量空間分布圖 ... 90 圖 4.6-6 四月河川出滲與入滲量空間分布圖 ... 90 圖 4.6-7 七月河川出滲與入滲量空間分布圖 ... 91 圖 4.6-8 十一月河川出滲與入滲量空間分布圖 ... 91 圖 4.6-9 第一層一月淨補注量分佈圖 ... 94 圖 4.6-10 第一層四月淨補注量分佈圖 ... 94 圖 4.6-11 第一層七月淨補注量分佈圖 ... 95
XII 圖 4.6-12 第一層十月淨補注量分佈圖 ... 95 圖 4.6-13 第三層一月淨補注量分佈圖 ... 96 圖 4.6-14 第三層四月淨補注量分佈圖 ... 96 圖 4.6-15 第三層七月淨補注量分佈圖 ... 96 圖 4.6-16 第三層十月淨補注量分佈圖 ... 96 圖 4.6-17 第五層一月淨補注量分佈圖 ... 97 圖 4.6-18 第五層四月淨補注量分佈圖 ... 97 圖 4.6-19 第五層七月淨補注量分佈圖 ... 97 圖 4.6-20 第五層十月淨補注量分佈圖 ... 97 圖 4.6-21 抽水較大區域與土地利用(左為第三層,右為第五層) ... 99 圖 4.6-22 抽水量較大之衛星地形圖(左為第三層,右為第五層) ... 99
1
第一章 前言
1.1 研究動機
台灣地區降雨量豐沛,平均降雨量約為世界平均降雨量之 2.6 倍,但 由於地狹人稠,每人每年之可分配雨量卻僅為世界平均值之七分之一。此 外,台灣地區降雨量在時間上及空間上之分佈極不均勻,全年約有 78%之 降雨量集中於豐水期(約五月至十月),枯水期(其餘六個月) 之降雨量則僅 佔 22%。此雨量時間上之分配不均,致使台灣地區必需有大型蓄水設施(水 庫)以進行水資源時間上之調度,亦即一般所謂之「蓄豐濟枯」。惟近年來 環境保護意識高漲,加上優良新壩址難尋,導致新的大型地表水工結構物 難以興建且開發成本大增。因此,尋求其他對環境衝擊較少且成本較低的 水資源,乃是當務之急。台灣地區蘊含豐富之地下水資源,如能妥善管理 運用,應可為一環境衝擊小且成本低的水資源之一,惟過去由於缺乏適當 的管理,許多地區過度使用地下水,導致環境災害發生,包括地層下陷或 海水入侵等,如濁水溪沖積扇則飽受地層下陷之苦。然而地下水並非不能 使用,其究竟是為一個可永續經營的水源或是在飲鴆止渴,端賴是否有適 當的管理。而良好的管理策略皆需經嚴格的評估修正而得,其中地下水數 值模擬則為最常見且有效的評估工具,管理者可以數值模擬檢驗地下水資 源操作策略之優劣。 濁水溪沖積扇為台灣地區最重要的地下水區之一,過去已有許多地下 水相關之研究,惟對於濁水溪本流對地下水之影響皆著墨不多。如劉聰桂 (1996)利用熱核爆氚示蹤方法評估地下水補注量;能邦科技(2000)、巨廷工 程和交通大學(2005)以一維垂向之溼地入滲係數和旱地降雨入滲率,評估 地下水補注量;農業工程研究中心(1989)、葉文工(1999)、中興工程(1997、2 1998)則利用二維多層地下水流數值模式逆推地下水收支;江崇榮等人 (2006)、地調所及交通大學(2009)則以水位歷線法推估地下水補注及抽取。 惟前述研究對於濁水溪本流對地下水之影響皆著墨不多,若有數值模式之 建立,亦鮮少加入河川因子之考量,其主要原因為河川參數(底泥厚度、底 床水力傳導係數及河川水位高度及寬度等)極難取得。惟大型河川對地下水 應有相當程度之影響,根據李振誥(2007)在新虎尾溪利用水位變化評估地 下水補注量之研究中,其河川高度將影響其滲漏百分比。因此,大型河川 在區域地下水模擬時仍應慎重考慮之。 有鑒於此,本研究乃以濁水溪沖積扇為研究區域,試圖克服資料之不 足建立考量濁水溪本流之地下水數值模式,探討濁水溪對於整個沖積扇地 下水之之影響,以為未來濁水溪沖積扇地下水管理之基礎。
1.2 研究目的
本研究目的為結合影像辨識與河川水位模擬,建立考量濁水溪本流之 濁水溪沖積扇地下水數值模式,以探討濁水溪水位與沖積扇區域地下水之 互動關係。其中以河川水理演算模式(HEC-RAS),決定濁水溪不同時期之 河水位,再以影像辨識技術推估濁水溪不同時期之水面寬度,求得河道面 積,以提供地下水數值模式中河川模組(River Package, RIV Package)之關鍵 參數。3
地下水數值模式
(MODFLOW 2000)
地表垂向 補注量 河川入滲 (/出滲)量 抽水量 定水頭邊界 流出量 圖 1.3-1 地下水系統水平衡關係圖 圖 1.3-1 為地下水系統水平衡關係圖,其中河川入滲量、地表垂向補 注量、定水頭邊界條件流出量與抽水量四者,為最常見之幾種進出水量。 其中,抽水量為人為之使用量;定水頭邊界淨流出量往往設定於下游海邊 等,其為系統向海邊外界流出之水量;地表垂向補注量則為非河川區域之 補注量,其僅在降雨期間方有補注源;河川入滲(/出滲)量則為河川水位與 地下水位高程間之相對關係,而有向河道出滲或向地下水系統入滲之差別; 抽水量為人類活動造成之水量進出。根據圖 1.3-1 之基本理念,本研究之 研究流程圖如圖 1.3-2 所示。4 資料蒐集 河道水理演算 (HEC-RAS) 河道影像辨識 (福衛二號衛星影像) 河水位 辮狀河道 分布 RIV Package 建置 MODFLOW正向模擬+ 專家系統參數檢定 河道資訊 水文地質 架構、參數 與邊界條件 END 其他模組建置 WEL Package 建置 圖 1.3-2 研究流程圖 由於本研究著重於濁水溪與地下水系統間的交互關係,因此首先分別 以河道水理演算模擬濁水溪水位,並藉由不同月份福衛二號所拍攝之濁水 溪河道影像,辨識濁水溪辮狀河道分布範圍。其次,以前述之河道資訊設 定河道模組(RIV Package),並將抽水量與垂向補注量等其他進出水量設定 為水井模組(WEL Package),以及搭配水文地質架構切割研究區域。接著, 以觀測水位搭配專家系統檢定淨抽水量,以釐清除河川入滲(出滲)量以外 之其他進出水量,淨抽水量等於抽水量減垂向補注量。 圖 1.3-3 為數值模式正向模擬與參數檢定的流程圖。由於水文地質架
5 構與參數,係採經濟部中央地質調查所繪製之水文地質架構圖與現地試驗 值為基礎,藉由徐昇氏多邊形,直接正向給入與建置數值模式,由於鑽探 資訊與抽水試驗之尺度與濁水溪沖積扇之尺度差異較大,故直接套用於濁 水溪沖積扇尺度之地下水數值模式,則可能存在不確定性。 因此本研究首先以專家系統參數檢定系統,自動化檢定整體之淨抽水 量,在深層無法直接補注之物理限制條件下,若無法滿足檢定標準,則針 對未收斂之區域,以其他現地調查資料為輔助,視情況微幅調整水文地質 參數與架構。 MODFLOW數值模擬 地下水 觀測水位 地下水 模擬水位 水文地質 架構與參數 抽水量 專家系統參數檢定系統 是否滿足 檢定標準? 否 結束 是 手動微幅調整 圖 1.3-3 數值模式參數檢定流程圖
6
第二章 文獻回顧
2.1 地下水數值模式
本研究將運用影像辨識技術,其適用於大地區的空間涵蓋特性,可累 積詳實且長時間紀錄,該技術並具有極佳的觀察能力,可用於觀察各季河 道面積之改變。此外,本研究亦應用河道水理演算,來補足河水位高程記 錄在空間上之不足,結合兩者建立一個考量濁水溪本流之濁水溪沖積扇地 下水數值模式,藉此以探討濁水溪河水與沖積扇區域地下水間之互動關係。 以下小節將分別針對地下水數值模式、河道水理演算與衛星影像辨識之文 獻回顧進一步說明。 2.1.1 地下水數值模式 在濁水溪沖積扇現地研究方面,濁水溪沖積扇之相關研究甚多,如劉 聰桂(1996)利用熱核爆氚示蹤方法評估地下水補注量;能邦科技(2000)以及 巨廷工程和交通大學(2005)以一維垂向飽和入滲係數和降雨入滲率,評估 地下水補注量;台灣大學土木工程研究所(1997)與台灣大學水工試驗所 (1998)以一維未飽和垂向地下水流模式評估地下水補注量;農業工程研究 中心(1989)、葉文工(1999)與中興工程(1997、1998)則利用二維多層地下水 流數值模式,藉由參數檢定方式逆推地下水收支;江崇榮等人(2006)與經 濟部中央地質調查所(2009)則以水位歷線法推估地下水補注及抽取;王雲 直(2010)則以專家系統發展出自動化地下水參數檢定模式,並將檢定模式 應用於濁水溪沖積扇,推估出民國 89 年至 98 年間之平均淨補注量;上述 各種研究估得濁水溪沖積扇歷年來之地下水補注量在 8.1 億到 15.4 億之間, 上述重要文獻數據整理至表 1.3-1。7 表 1.3-1 濁水溪沖積扇補注量相關研究比較(資料來源:經濟部水利 署) 方法 估算人/委辦單位 範圍/面積 抽水量 水平衡法配合 地下水數學模 式(有限元素法) 曹以松、劉佳明、徐 年盛、鄭昌奇(1989)/ 台灣省水利局 濁水溪沖積扇/約 1800 平方公里 10.91 億噸/ 年 2DFEWA 數值 模擬 李清水、林俊男 (1994)/經濟部水資 源局 濁水溪沖積扇/約 1800 平方公里 16.44 億噸/ 年 3DFEWA 數值 模擬 張信誠、劉振宇 (1996)/國科會 雲林/約 1120 平 方公里 6.6 億噸/年 MODFLOW 數 值模擬 林再興(1998)/經濟 部水資源局 彰化地區/約 830 平方公里 11.12 億噸/ 年 MODFLOW 數 值模擬 中興工程(1998)/水 利處 濁水溪沖積扇 /2000.5 平方公里 8~9 億噸/ 年 MODFLOW 數 值模擬 中興工程(2001)/水 利署 濁水溪沖積扇/約 1800 平方公里 8.8 億噸/年 MODFLOW 數 值模擬 張良正、劉振宇 (2002)/水利署 濁水溪沖積扇/約 1800 平方公里 23.1 億噸/ 年 水平衡法 中興工程(1998)/經 濟部水資源局 濁水溪沖積扇/約 1800 平方公里 7.44 億噸/ 年 水平衡法 水利處(1997a) 雲林/約 1120 平 方公里 7.57 億噸/ 年 水平衡法 水利處(1997a) 濁水溪沖積扇/約 14.1 億噸/
8 1800 平方公里 年 現場調查 水資會(1992) 濁水溪沖積扇/約 1800 平方公里 21.02 億噸/ 年 地下水歷線分 析法(未考慮旱 作抽水) 江崇榮等(2006) 濁水溪沖積扇 /2079 平方公里 13.32 億噸/ 年 用電量分析 雲科大(2008) /水利 署 濁水溪沖積扇 /1800 平方公里 20.90 億噸/ 年 地下水歷線分 析法(同時考慮 非灌溉、稻作和 旱作灌溉抽水) 本計畫(2011) /水利 署 濁水溪沖積扇 /2562 平方公里 22.28 億噸/ 年 惟前述研究僅著墨於沖積扇之地下水,較少針對濁水溪本流對地下水 之影響進行探討。然大型河川與區域地下水系統應有相當程度之影響,對 於河川入滲量與出滲量之推估應進一步考量。Sophocleous et al.(1995)以 MODFLOW 模擬美國堪薩斯州沖積平原,研究中考量河流與含水層之交互 關係,結果顯示河床底泥透水性、河床貫穿含水層之程度與含水層之異向 性 為 影 響 河 道 與 地 下 水 補 注 量 之 重 要 因 素 。 Bulter et al.(2001) 利 用 MODFLOW 建立多層含水層之地下水系統,並推估在低水力透水係數下, 河床之河道滲漏量。Chen and Chen(2003)以質點追蹤模式描述在異向性含 水層中,河水移動至地下水井之過程。
在國內研究方面,李(2007)利用河道流量估計法(SF)與 MODFLOW (MF)推估新虎尾溪之河道滲漏量,其並以 Ferris (1962)之解析模式與 MF
9
法評估河道水位上升對河道滲漏量之影響,結果顯示 SF 與 MF 法推估河 道年滲漏量分別為 264.2 與 170.9 萬噸。Ferris 與 MF 法推求當河道水位 上升 2.5m 後,河道年滲漏增加量分別為 31.6 與 26.4 萬噸。由 SF、Ferris 與 MF 方法推估抬升河道水位對滲漏量可增加 10.0%至 18.5%效益。本研 究將以 MODFLOW 2000 之河道模組(RIV Package)模擬濁水溪,藉此釐清 濁水溪對濁水溪沖積扇水收支平衡之關係。
2.1.2 參數檢定
如前所述,地下水數值模式常應用在許多地下水管理問題中,惟地下 水 數 值 模 式 的 建 置 需 大 量 之 水 文 地 質 參 數 , 如 透 水 係 數 (Hydraulic conductivity (K)或儲水係數(Storage coefficient (S),以及其他抽水量、補注 量與邊界條件等資料,這些參數常難以直接現地量測,或因成本之關係其 資料密度常遠低於模式所需,因此模式建置過程中,常需以參數檢定方式, 逆向推求部分參數數值,此一般稱為參數檢定(Yeh, 1985)。 參數檢定最常用的方式為藉由調整模式參數值而使模式模擬值接近觀 測資料值,而參數調整又可分為人工調整或是藉由演算法由電腦程式調整。 人工檢定最大的問題為費時費工,為了解決這個問題,許多研究利用優選 法進行模式之自動參數檢定(Mazi et al., 2004; Mazi et al., 2000; Hill et al., 1992)。在電腦普及計算速度突飛猛進的現在,自動參數檢定妥善利用此優 點,達到相較於人工率定省時省力的目的。然而,應用優選法於參數檢定 需先確認並建立目標函數與限制式,亦即需先將如何調整參數的想法結構 化成數學方程式,因此相較於人工參數檢定較缺乏彈性。傳統上,採梯度 類型優選法之自動化參數檢定工具,如 Ucode 等,由於梯度類型之優選方 法需以參數與水位之敏感度矩陣訂定搜尋方向,為使參數檢定模式通用化, 在此常以差分方式建立敏感度矩陣。然差分化敏感度矩陣,需藉由反覆呼
10 叫模擬模式方可求得,故其計算量隨著參數維度大幅增加,對於高參數維 度問題之計算量將大幅增加。且其梯度型演算法受到初始搜尋位置的影響 極劇,若初始解不同常造成不收斂或不一致之結果。 人工參數檢定之優點為模式建立者可藉由參數檢定過程,增加對模式 的了解,修正模式架構上可能的誤差。 Boyle (2000)比較了水文模式之人 工參數檢定及應用優選法之參數檢定,並且合併兩種參數檢定方法以改善 兩者之缺點。他比較人工參數檢定與應用優選法之參數檢定所得到之結果, 指出前者較能被水文學家所接受,因為人工參數檢定之過程不僅可以被檢 視,而且能幫助水文學家進行結果分析。惟人工參數檢定之缺點為參數推 估過程複雜而冗長,費時費力,且其經驗與知識多累積於人,因此如將模 式知識傳承轉移給他人,也是應用人工參數檢定上的一大問題(Madsen et al., 2001; Chau and Chen, 2001; Chau, 2004; Chau, 2006)。
有鑑於人工參數檢定的專業知識轉移困難,以往有許多研究應用專家 系統協助進行參數檢定(Abbott, 1991; Chau and Chen, 2001; Chau and Albermani, 2002, 2003; Chau, 2004; Kim, 2007),以求兼顧知識透明度與檢 定效率。專家系統是一個仿人類專家之智慧型電腦系統,使用者可以透過 與專家系統的互動介面來描述問題,專家系統再藉由其內部已定義好的知 識與推理來回答問題。因此專家系統的建置,即是在將專家的知識進行結 構化及表達,亦即在將專家知識進行透明化。陳(2008)以專家系統應用於 穩態及暫態地下水流模式之參數檢定,其著重於檢定模式之水力傳導係數 (K)及儲水係數(Ss 與 Sy)。王(2010)與張(2011)則延續陳(2008)之架構,分別 應用專家系統於穩態與暫態淨補注量(net Recharge, Q)之檢定上,兩者除以 設計案例驗證系統正確性外,均延伸應用於濁水溪沖積扇上。研究指出, 以專家系統為基礎之參數檢定系統,除可克服因差分帶來之大量計算量外,
11
對不同初始解而言,均可有類似之檢定結果,顯現該參數檢定系統之強健 性。本研究將延續張(2011)之成果,應用於濁水溪沖積扇之參數檢定上。
2.2 河道水理演算
河道水理演算已為蓬勃發展之學門,歷年來各研究單位均已研發大量 數值模式,如:SOBEK 為荷蘭 WL∣Delft Hydraulics 所發展,為一套整合 了河川、都市排水與流域管理的套裝程式。模式包含降雨逕流、河道演算、 水質模式、輸砂計算、鹽分入侵及即時控制等九套模式,各模式可相互銜 接並整合地理資訊系統,便於資料之輸入及展示。SEC-HY21 為中興社許 長安博士所研發完成之軟體,其能考量水理之情境如定床水理、輸砂與河 床沖淤、污染質傳輸、颱風暴潮、海嘯、土石流、及風浪場等流況之模擬 與應用。CCHE1D 為一水理模組,求解聖凡南(Saint-Venant)方程式,滿足 流體為不可壓縮、靜水壓分佈、忽略風力、科氏力之假設,採普利司蒙 (Preissmann)四點隱式有限差分法離散控制方程式,並針對離散之控制方程 式發展一套線性疊代法,並利用雙掃法求解之。模式可計算變量流況下之 複式斷面河川網路對水工結構物之影響。 就演算時間及經濟層面而言本研究採一維水理模式模擬河道水位,其 中又以 HEC-RAS 最常見。HEC-RAS 為一免費軟體,且包含使用者圖形介 面(Graphical User Interface,簡稱 GUI)使用者更能輕鬆上手,因此本研究 採 HEC-RAS 模擬濁水溪河水位高程,作為後續地下水模式之資訊。
2.3 衛星影像與衛星影像辨識
由於遙測技術具有大地區的空間涵蓋特性,可以提供詳實且長時間的 紀錄,並具有極佳的觀察能力,是快速獲取全面性最新國土資訊的調查及 監測工具。尤其在民國 93 年我國自主之「福爾摩沙衛星二號」成功發射之
12 後,提供了台灣地區自主性高、影像解析度高、資料獲取週期短、價格較 便宜等特性的福衛二號遙測影像,為地表改變狀況及監測河川區域的理想 資料來源。 衛星影像辨識常應用於大區域土地利用的辨識,盧(2008)藉由福衛二 號多時期的衛星影像,判釋農地的利用情形,其利用各種時期的衛星影像, 搭配常態化植生指標(Normalized Difference Index, NDVI),將農地區分為水 稻、旱作、漁塭及休耕等四大分類。陳(2009)採物件導向式分類方法,以 歸屬函數、半變異元紋理、GLCM 紋理及主成分分析等,建立香蕉作物之 判釋。黃(2010) 利用常態化植生指標(NDVI),辨識水稻的插秧日期與稻作 種植位置。顯現衛星影像辨識可應用於大區域之農地辨識。 在衛星影像應用於河道辨識方面,Lina Zhu(2006) 利用遙測影像量測 河道變遷,不僅可有效的濾掉雜訊也提高準確度。張(2008)以自強大橋下 游至西濱大橋為試區,由衛星影像辨識技術,劃定河道潛在揚塵發生區位。 而經濟部水利署在民國 95 年利用衛星遙測於河川區域監測管理,為了釐清 土地使用概況,應用福衛二號遙測影像進行變異監測的準確度。黃(2008) 憑藉航空照片影像,以影像處理技術發展一套”自動河道變遷分析系統”, 此系統可以用來偵測航空照片中的河道影像,觀察 2001 年(桃芝颱風後)、 2004 年(敏督利颱風後)以及 2006 年(艾莉颱風、海棠颱風後)的航空照片並 分析經過這些天災肆虐之後,從德基壩至馬鞍壩之間大甲溪主要河道於不 同時段的變遷情形。
13
第三章 理論敘述
本研究重點在應用衛星影像辨識以及河道模擬演算(HEC-RAS)與地下 水模擬模式 MODFLOW 整合,建立地下水數值模式。以下 3.1 節將說明地 下水數值模式,3.2 節與 3.3 節再分別介紹 HEC-RAS 河道定流量演算及衛 星影像河道辨識。3.1 地下水數值模擬與參數檢定
本研究應用 MODFLOW 對濁水溪沖積扇進行地下水數值模擬,其中 參數檢定沿用張(2011)建立之自動化參數檢定專家系統,以下分別對地下 水數值模擬及參數檢定專家系統進行說明。3.1.1 MODFLOW 之河川套件(River package)簡述
本研究所應用之 MODFLOW 模式係由數個套件(package)所組成,每 個套件再由數個模組(module)所組成,使用者可依所需功能選擇使用之套 件,未被使用的套件則不啟動以節省電腦計算資源。本研究之濁水溪沖積 扇地下水數值模擬則使用了 Discretization file (DIS)、Zone array (ZONE)、 Basic Package (BAS)、Output Control Option (OC)、Layer Property Flow package (LPF)、Well Package (WEL)、Preconditioned Conjugate-Gradient Package (PCG)及 River package(RIV)等八個套件。當 MODFLOW 執行時, MODFLOW 遂依據所啟用之套件,讀取所相對應之輸入檔。以下將針對 River Package 做更詳細之說明。
MODFLOW 內的 River package 主要用於模擬河川對於周遭含水層入 滲之情況。如圖 3.1-1 所示,hRIV 為河川水位高,hi,j,k為模式內的地下水水
14 圖 3.1-1 河川入滲機制示意圖 此模組的設定概念為將河川斷面視為一矩形斷面。而垂直方向上,以 河川底泥的底部(RBOT)為此矩形斷面的渠底交界面,使水流流向只能經由 渠底底泥做一維方向的入滲。因此單位網格內的入滲能力,由底泥厚度與 底泥的水力傳導係數主導外,亦受單位網格內的河川長度與寬度影響,如 式 3.1-1。而入滲量的計算根據達西定律可由式 3.1-2 表示。 河川與區域地下水間之地下水流方向則由河川水位與含水層地下水位 兩者間之相對值所決定。其符號設定為流入含水層為正,流出則為負,也 就是當河川水位高於地下水水位時,水由高水位流入較低水位的含水層, 使之得到補注,故符號標記為正。反之,當河川水位因枯水期或其他人為 影響時,導致水量變少,河水位下降至低於附近的含水層水位,此時的地 下水則由含水層流出至河川,因此,此時的達西入滲公式須做修正如式 3.1-3,式 3.1-3 對於河水位面低於河床底泥高程時,提供了更合理的估算。 seds seds RIV b K w L COND (3.1-1) ) ( RIV i, kj, RIV RIV COND h h Q (3.1-2) ) (h RBOT COND
QRIV RIV RIV (3.1-3)
CONDRIV 河寬底床傳導性 [L2T-1]
L 河川長度[L] W 河川寬度 [L]
15 Kseds 河川底床傳導係數[LT-1] bseds 河川底泥厚度[L] 3.1.2 參數檢定專家系統建置 本節將對於參數檢定專家系統建置做進一步說明,主要分為參數檢定 流程、參數檢定系統資訊平台、參數檢定規則與推論及參數檢定初始設定 等。 參數檢定流程 本系統之參數檢定流程如圖 3.1-2 所示,在參數檢定開始後,系統首 先初始化參數值,即淨補注量及抽水量,並讀入相關參數的設定資訊,如 分區設定、觀測井位置、觀測水位等。 開始參數檢定 初始化參數值與 設定模式參數檢定 相關資訊 執行地下水模式 MODFLOW 傳送相關資訊 至專家系統 專家系統對各區 進行參數修正 以修正值更新 MODFLOW輸入檔 各區檢定誤差 均小於容許誤差 是 停止參數檢定 否 圖 3.1-2 參數檢定流程圖
16 在 完 成 初 始 參 數 設 定 後 , 接 著 執 行 地 下 水 模 式 MODFLOW , MODFLOW 完成地下水流模擬後,將地下水位輸出成 ASCII 格式之檔案。 下一步則為專家系統前處理器判斷各分區之觀測水位與模擬水位之誤 差(以下稱為檢定誤差)是否均小於容許誤差。當有一分區之檢定誤差超過 容許誤差,專家系統前處理器則會取出各分區的相關資訊,包括水位高、 淨補注量或抽水量、模擬水位與觀測水位誤差以及上次參數檢定所得參數 修正量,然後傳入專家系統進行推論分析。 將所需資訊傳送至專家系統後,系統接下來會執行專家系統,專家系 統依據知識庫中之規則集合(rules),並搭配推理機(inference engine)之運作, 而推論出各區的參數修正量。 當各區待檢定之參數,由專家系統分析出修正量後,專家系統後處理 器再將各修正量依據 MODFLOW 輸入檔格式,對 MODFLOW 輸入檔進行 更新。 接著再次執行 MODFLOW,計算出更新參數後的地下水位,再由專家 系統前處理器判斷各分區檢定誤差是否均小於容許誤差,若是則停止參數 檢定,若否則反覆執行上述步驟,直至所有分區檢定誤差均小於容許誤差。 參數檢定資訊系統平台 專家系統乃一模仿人類專家且具有決策能力的智慧型電腦系統,本研 究採用 CLIPS(C Language Integrated Production System)建立地下水模式參 數檢定專家系統,CLIPS 乃一方便採用物件導向概念,用以建立專家系統 之工具。在本研究中,地下水模式以分區為概念進行參數檢定,一個分區 即為一個物件,在 CLIPS 中則以建立實例(instance)的方式應用物件導向概 念。在每個實例(物件)中,則有若干屬性(slot)代表各分區的特性,如 K 值、 所在分層、淨補注量或抽水量、模擬水位與觀測水位誤差及各種參數調整
17 依據。研究所建立之專家系統,乃將熟悉地下水模式參數檢定之人類專家 所具有之經驗及知識轉換成規則(Rule)並將之存放於知識庫(Knowledge Base),當專家系統對地下水模式進行參數檢定時,專家系統依據所輸入之 情況並透過推理機(Inference Engine)對知識庫內之規則進行規則推論(Rule Inference),其推理結果即為所輸入問題之答案。 參數檢定規則與推論 在建立專家系統之前,必須先擷取參數檢定之經驗及知識。由於本研 究室之研究團隊,在地下水檢定方面已有相當多研究,相關經驗豐富,因 此與研究團隊之學長以及指導教授進行訪談及討論,之後再依據討論結果, 歸納出以下幾點概念: 一般地下水流模式中,由於受到流線的影響,使得上游進行調整時, 會對下游影響較大;而下游進行調整時,對上游影響較小。因此模式大多 會從上游開始往下游調整。 1. 在多層地下水模式檢定中,由於表層補注量的大小對於下層含水層 抽水量有顯著的影響,因此進行人工檢定時,通常會先進行表層抽水/(補 注)量檢定,再依序往下層進行抽水量檢定。 2. 在人工檢定地下水模式時,通常會以迭代方式來回調整各分區參 數,使各區之檢定誤差逐漸縮小。 基於上述概念,本研究經由反覆測試,將其歸納成更具體的參數調整 原則,詳細說明如下所示: 1. 在進行參數調整前,各分區應先設定初始修正量(ΔQ),作為參數 調整幅度之基準。 2. 開始調整時,需判別修正方向。當觀測水位大於模擬水位時,往正 方向調整,即增加水量;當觀測水位小於模擬水位時,往負方向調整,此
18 時應減少水量。 3. 判別修正方向後,接著應判斷修正量,其判斷方法為比較本次檢定 與上次檢定時之修正方向。若修正方向相同,表示參數修正持續向同方向 進行,則修正量不變;若修正方向相反,表示參數調整震盪,則修正量減 半。 4. 經多次調整後,參數修正量會逐漸縮小,然而因多分區同時進行調 整,各分區會受相鄰分區影響,可能使得調整量縮小過快,造成檢定速度 趨緩,因此當檢定速度過慢時,各分區調整量設定為同時放大一定倍數。 參數檢定初始設定 首先,專家系統在進行初次檢定時,會先設定各分區參數調整量ΔQ。 之後每次參數調整,ΔQ 都會根據規則進行調整,並儲存起來作為下一次 參數調整之參考。各分區均有自己的ΔQ,根據規則進行調整,不受其它 分區影響。此外,每次進行推論會得出一個ΔQ 之外,還會獲得一個正號 或負號。正號即代表該區的實際的水量應比現在要多,因此需增加水量, 所以將現在的抽水量(或補注量)Qn 加上所推論出的ΔQn,而獲得新的抽水 量(或補注量)Qn+1,如式 3.1-1。反之亦然,負號即代表該區的水量應比現 在要少,因此需減少水量,所以將現在的抽水量或補注量 Qn減去所推論出 的ΔQn,而獲得新的抽水量或補注量 Q n+1,如式 3.1-2。 n n n Q Q Q 1 (3.1-1) n n n Q Q Q 1 (3.1-2)
3.2 HEC-RAS 河道定量流演算
本研究以 HEC-RAS 模式(River Analysis System)進行河道水理演算, 其為美國陸軍工兵圑水文工程中心所發展,HEC-RAS 可進行一維變量流與
19 定量流之河道水理計算。演算步驟採用標準逐步推算法 (Standard Step Method) 求 解 能 量 方 程 式 , 而 摩 擦 之 能 量 損 失 則 以 曼 寧 公 式 (Manning Equation)計算。 HEC-RAS 模式之控制方程式包含連續方程式、能量方程式、動量方程 式以及曼寧方程式等物理定律,分別介紹如下: 連續方程式(Continuity Equation) V A Q (3.2-1) 其中Q代表流量(cms) A代表河川斷面積(m2) V 代表平均流速(m/sec) 能量方程式(Energy Equation) 對於亞臨界流、超臨界流及混合流況之水面剖線演算,其演算的基礎 是以標準步推法(Standard Step Method)針對一維能量方程式做求解,如下 式所示: e h g V Z Y g V Z Y 2 2 2 1 1 1 1 2 2 2 2 2 (3.2-2)
20 圖 3.2-1 能量方程式示意圖 其中,Y代表河川上下游斷面之水深(m) Z 代表河川上下游斷面之高程(m) V 代表平均流速(m/s) a代表能量校正係數 g代表重力加速度(m/s2 ) e h 代表能量損失水頭(m) 而he能量損失水頭計算的公式表示如下: g V g V C LS he f 2 2 2 1 1 2 2 2 (3.2-3) 其中,L代表河川上下游斷面間之距離(m),如圖 3.2-2 所示。 f S 代表河川上下游斷面間之平均能量坡降。 C代表束縮與擴張能量損失係數,如表 3.2-1 所示。 而L所表示的公式如下:
21 ROB CH LOB ROB ROB CH CH LOB LOB Q Q Q Q L Q L Q L L (3.2-4) 式中,LLOB代表左岸上下游兩斷面間的距離。 LOB Q 代表左岸上下游斷面間的流量。 CH L 代表主槽上下游斷面間的距離。 CH Q 代表主槽上下游斷面間的流量。 ROB L 代表右岸上下游兩斷面間的距離。 ROB Q 代表右岸上下游斷面間的流量。 圖 3.2-2 河川上下游斷面間距之定義 HEC-RAS 模式在計算平均能量坡降(Sf )時,提供了四種選擇,如下列 表示: (1)平均輸水函數坡降法(Average Conveyance) 2 2 1 2 1 K K Q Q Sf (3.2-5) (2)算術平均坡降法(Average Friction Slope)
X 1 X 2 Right of Bank(ROB) Left of Bank(LOB) Main Channel(CH)
22 2 2 1 f f f S S S ……….(3.2-6) (3)幾何平均坡降法(Geometric Mean Friction Slope)
2 1 f f
f S S
S ………(3.2-7)
(4)調和平均坡降法(Harmonic Mean Friction Slope)
2 1 2 1 2 f f f f f S S S S S ……….(3.2-8) 表 3.2-1 束縮與擴張係數表 項目 束縮 (Contraction) 擴張 (Expansion)
沒有漸變損失(No transition loss) 0.0 0.0
漸變段(Gradual transition) 0.1 0.3
典型有橋樑斷面 (Typical bridge section)
0.3 0.5 突變段(Abrupt transition) 0.6 0.8 動量方程式(Momentum Equation) 在橋墩、箱涵、匯流口及跌水工等處,經常會產生亞臨界流轉換成超 臨界流,或者超臨界流轉換成亞臨界流之突變流況的情形,為了有效解決 突變流況的問題,HEC-RAS 模式於這些河段採用動量方程式進行演算。動 量方程式是由牛頓第二運動定理(Newton’s second law of motion)變化而來, 表示如下: X f X F Q V W P P2 1 ... (3.2-9) 其中, P代表作用在該控制體積之壓力;
23 X W 代表往X方向的流體重力; f F 代表流體流動所產生的反方向摩擦力; Q代表流量; 代表流體密度; X V 代表兩斷面於X方向之流速差。 圖 3.2-3 動量方程式示意圖 曼寧方程式(Manning’s Equation) 此方程式為河川在測定流量時最常使用的公式,將水體所受到的摩擦 阻力,藉由曼寧 n 值所展現出來,此方程式如下所示: 2 1 3 2 f S R n k V ... (3.2-10) 其中,k在公制時為 1,在英制時則為 1.486。
n為曼寧阻力係數(Mannings roughness coefficient),可依據表 4.2-1 加 以決定;
R代表水力半徑(Hydraulic radius),RA(濕周斷面積)/P(濕周長);
f
24
3.3 衛星影像河道辨識
遙測技術可提供大範圍、多時性及數位化的環境資料,因此藉由衛星 遙測獲取資料已經成為目前的趨勢。 3.3.1 遙測基本原理 在日常生活中,常見的量測行為大多都需要接觸到目標物,例如:使 用尺測量長度,或站在體重計上顯示體重,前述之體重計即為感測器,這 些感測器都需要和物體接觸才能得到資訊。相對於前述之量測方式,感測 器無需與目標物接觸,就能獲得目標物的各項特性,即可稱為遙測。但遙 測特別的地方在於不需要接觸物體,也能得知物體的一些特性。最常見到 的遙測方式,就是透過眼睛看到東西,利用照相機拍攝映出圖像。 實質上,遙測技術可搭配各式特定的感測器,可接收不同波段之電磁 波能量。所利用之電磁波波段範圍相當廣,從 X 光、可見光、紅外光至微 波,構成一完整的波譜(見表 3.3-1)。 表 3.3-1 電磁波波譜 波譜 波長(單位:μm) X 光 0.03-3.0μm 紫外線 0.03-0.4μm 可見光 0.4-0.7μm 近紅外 0.7-1.3μm 中紅外 1.3-3.0μm 熱紅外 3-5,8-14μm 微波 0.1-30cm25 由於不同物體都有獨特的輻射特性,不同的波段的電磁波,作用在不 同物體上,會有不同反射能量反應,圖 3.3-1 是不同波段電磁波作用在土 壤、植物及水等三種物體上的輻射反應值。以植物為例,由紫外線波段 (0.03-0.4μm)至可見光綠色波段 (約 0.5μm)雖其反射量有提昇,但在 0.8-1.3μm 波段處(即近紅外波段),其抬昇幅度最為明顯,此為植物獨特的 特性。此外,對水而言,除了可見光外,其餘波段之電磁波均會完全被水 所吸收。 圖 3.3-1 植物、水及土壤在不同波長的輻射反應 人在可見光以外的光譜是看不到的,若僅藉由可見光光譜,有時候會 發生誤判或無法分辨。如要分辨綠色建築物和自然草地,其實是有困難的, 因為在可見光的範圍兩者有著相似的輻射能量。但是若搭配近紅外光,自 然草地在近紅外波段有較大的輻射能量,而綠色建築物卻不會大量反射, 因此搭配其他波段,有助於辨別出自然草地或綠色建物等。 3.3.2 遙測載具 裝載感測器的遙測平台相當多,但以飛機及衛星的使用較為普遍。飛 機因為飛行高度,涵蓋範圍和不定週期的特性,對於大範圍環境變遷的持
26 續監測有實際應用的困難。衛星遙測因具有綜觀,動態及多時的特性,因 而成了大範圍的環境監測的有效工具。本節將針對目前較為通用的環境遙 測衛星及其感測器作一簡要的說明。 福爾摩沙衛星二號為地球遙測應用衛星,其重量約 764 公斤左右,其 形狀為六角柱型,高 2.4 公尺,外徑約 1.6 公尺(太陽電能板未展開時)。軌 道高度 891 公里,太陽同步軌道之設計。影像解析度為黑白影像 2 公尺, 彩色影像 8 公尺,任務壽命預計可達五年以上,已於民國 93 年 5 月 21 日 發射成功。 福爾摩沙衛星二號的主要任務是獲得台灣陸地及海域近即時(near real-time)的衛星影像資料,以做為土地利用、農林規劃、環境監控、災害 評估、科學研究、科學教育等相關之民生及科學用途。福爾摩沙衛星二號 除主要的遙測酬載外,同時也搭載一個科學酬載儀器,做為太空科技研究 與科學實驗的運用。福爾摩沙衛星二號每日繞地球飛行 14 圈,地面軌跡 (ground track)將通過澎湖與台灣本島中間。每天經過台灣二次。在天候許 可的情況下,一次經過可拍攝四個緊鄰的影像條,以涵蓋台灣全島,得到 相當完整的台灣本島影像。福爾摩沙衛星二號並可改變衛星的前後仰角, 以進行立體攝影。
27 表 3.3-2 福爾摩沙衛星二號之遙測酬載儀器規格 軌道 891 公里高,太陽同步軌道,每日通過台灣海峽上空二 次 光譜分析 全色態 (PAN) 0.52~0.82μm 多頻譜 (MS) 藍 0.45~0.52μm 綠 0.52~0.60μm 紅 0.63~0.69μm 近紅外 0.76~0.90μm 空間解析度 全色態(黑白)影像 2 公尺 (近地點) 多頻譜(彩色)影像 8 公尺 像幅寬 24 公里 任務壽命 5 年 發射日期 民國 95 年 5 月 21 日 (取自國家太空中心網頁 http://www.nspo.gov.tw, 2004/06/14 )
28 表 3.3-3 福衛二號影像及相關參數 感測器 光譜範圍(μm) 解析度 (m) 週期 (天) 涵蓋範圍 (km2) 飛行高度 (km) 多光譜 0.45-0.52 0.52-0.6 0.63-0.69 0.76-0.9 全色態 0.52-0.82 1. 藍 0.45-0.52 2. 綠 0.52-0.6 3. 紅 0.63-0.69 4. 近紅外 0.76-0.9 0.52-0.82 8 0.45-0.52 8 0.52-0.6 8 0.63-0.69 8 0.76-0.9 2 0.52-0.82 每天 24×24 891 3.3.3 衛星遙測資料之特性 衛星遙測資料具有下述四種主要特性: 1. 多光譜 大部分資源衛星多光譜感測器的波段範圍都由大量的地物波譜特徵 所決定,而一般來說衛星遙測的感測器主要利用多波段得到地表的輻射能 量,並將地物波譜的微弱差異區分並記錄下來,供相關單位研究與應用。 表 3.3-3 為常見的波段與其對應之相關應用領域。
29 表 3.3-3 常見波段與相關應用領域 名稱 波長範圍 (單位: μm) 波段和辨識的地物說明 藍波段 0.45-0.52 水體穿透力強,利於製作近海海圖。 可用在土壤及植物的判別。 綠波段 0.52-0.60 對於茂密植物的綠色反射質敏感。 紅波段 0.63-0.69 葉綠素的主要吸收段,區分植物種類 及覆蓋度。 近紅外波段 0.76-0.9 用於區別植物類別、水體。 中紅外波段 1.55-1.75 反映土壤濕度,植物含水量,用於區 分雲和雪。 中紅外波段 2.08-2.35 可辨別岩石、地質種類,對於植物的 含水量敏感。 熱紅外波段 10.4-12.5 監測有關熱的特徵及相關應用。 2. 空間性 早期的地表環境調查多以點或線為主,相對於前述的點或線,遙測技 術則是以面的方式大範圍偵測,因此遙測技術提供了重新認識地表環境的 機會。此外,一些衛星遙測能提供立體像,以供觀測立體地面、描繪等高 線及建立數值地形模型(DTM),增加衛星遙測從平面進入立體的可能性。 而遙測影像一般以空間解析度來描述資料的空間清晰度,例如 2 公尺空間 解析度的影像,代表資料能清楚顯示大於(2 公尺× 2 公尺)的物體,可進行 辨識輪廓及形狀等。 3. 多時性 衛星遙測可提供歷史性和週期性的資料,對同一地區可進行動態變遷
30 的偵測。在台灣早期因遙測資料難以取得,但接受站成立後,累積相當多 的遙測資料,而各種衛星的影像已應用各種環境的動態變遷監測上。週期 性的遙測資料能提供地形圖的更新,和過去的地形圖進行比較能找出地表 變化的地方,可加速地形圖的更新。 4. 數位化 衛星遙測資料原形是以數位化的格式記錄,利於電腦處理和發展自動 化的影像辨識方法。數位化的資料也能得到一定精度的定量分析結果。因 想要提高遙測實際應用,所以衛星遙測資料之應用正走向資料整合、綜合 分析和各種遙測及空間資料的彼此搭配。
31
第四章 濁水溪本流與區域地下水互動模式建置
如前所述,濁水溪本流對區域地下水之影響,本研究乃以 MODFLOW 中之河道模組(RIV Package)模擬,由於河道模組(RIV Package)之建置,需 要設定河道水位、河寬與河長等相關資訊,然而濁水溪由觸口至出海口, 僅有四個觀測水位站,相對於河道模組所需各河道網格之河水位高程,水 位資訊在空間分布上嚴重不足。因此,本研究乃以 HEC-RAS 河道水理演 算模式進行模擬,藉此計算整條河川各河段之水位高程,此將於 4.2 節詳 述。另外,河川長度與寬度部分,則藉由各月份之福衛二號衛星影像照片, 搭配衛星影像辨識技術,辨識出辮狀河道之分布,藉此決定河道之等效長 度與寬度,此將於 4.3 節詳述。
4.1 研究區域
濁水溪沖積扇為台灣地區最重要的地下水區之一,其位於臺灣西部海 岸中段,北起烏溪,南至北港溪,東以八卦台地及斗六丘陵山麓為界,西 臨臺灣海峽,面積約 2,080 平方公里。本沖積扇最主要之河川為濁水溪, 主流發源自中央山脈西翼、合歡山以南與玉山山脈北側之間地區,向西切 穿雪山-玉山帶、麓山帶與八卦-斗六丘陵區,在丘陵區西側形成沖積扇 系統,主流流經沖積扇中央,向西注入臺灣海峽。其他位於沖積扇之河川, 自北而南有舊濁水溪、新虎尾溪、舊虎尾溪及北港溪等。濁水溪沖積扇地 勢平緩,高程約介於海拔 0~100 公尺間。 1. 水文地質架構 經濟部中央地質調查所於 88 年,完成臺灣地區地下水觀測網第一期 計畫,在濁水溪沖積扇水文地質調查研究報告中,以濁水溪沖積扇合計共 72 站之地層柱狀圖為基礎,完成水文地質剖面之繪製(剖面 1 至 12),深度32 約至 300 公尺左右,並以丘陵及河谷區,合計 8 站之地層柱狀圖為基礎, 完成丘陵及河谷區之水文地質剖面之繪製(剖面 13 至 15),深度約達 250 公 尺左右。 水文地質剖面圖中,建立濁水溪沖積扇之概念分層,其中由上而下包 括第一含水層(F1)、第一阻水層(T1)、第二含水層(F2)、第二阻水層(T2)、 第三含水層(F3)、第三阻水層(T3)、第四含水層(F4)及第四阻水層(T4)。圖 4.1-1 為海園至石榴間之水文地質剖面圖。 圖 4.1-1 濁水溪沖積扇水文地質剖面圖(海園至石榴) 2. 地下水觀測 由於濁水溪沖積扇水資源運用狀況,多半仰賴地下水水資源,所以地
33 下水觀測網之第一階段(81 年度至 87 年度)即選定濁水溪沖積扇作為首 要觀測對象。目前計有地下水觀測站 82 站(203 口),抽水試驗站 28 站(55 口),水文地質調查站 88 站。圖 4.1-2 為濁水溪沖積扇地下水觀測網分布 圖。 3. 水文地質參數 濁水溪沖積扇大致可區分為扇頂、扇央及扇尾區,扇頂區位於員林、 溪州、西螺、虎溪、東和連線以東,各含水層間無明顯阻水層存在,亦即 T1、T2、T3 與 T4 尖滅不見,地面水可直接補注至深層,即所謂濁水溪沖 積扇扇頂非受壓含水層區;扇央區位於扇頂層區以西,至好修、趙甲、潭 墘、田洋、北港聯線以東, F1 上方存在一阻水層(在此通稱 T0)覆蓋,各 含水層間有明顯之阻水層(即 T1、T2、T3 與 T4)存在,地面水無法直接補 注各含水層,唯以地層材料而言,砂礫材料所佔之比例較大;扇尾區位於 扇央區以西至沿海,F1 上方存在 T0 覆蓋,各含水層間亦如扇央區,皆有 明顯阻水層存在。 扇央與扇尾地質結構相近,惟以地層材料而言,扇央之砂礫所佔之比 例較扇尾大,相對地,扇央之粉砂、泥及粘土所佔之比例,則較扇尾大。 區域之透水係數(K)約介於 3 5 10 ~ 10 (公尺/秒)之間,導水係數(T)約介於 0.6 ~251.4 平方公尺/秒之間,比容量(Q/s)約介於 0.34~208.33 立方公尺/小時/ 公尺,含水層水力特性以扇頂最佳,扇央次之,扇尾最差。
34
35
4.2 應用 HEC-RAS 於濁水溪河水位模擬
圖 4.2-1 為濁水溪之系統圖,濁水溪主流上共有四個水位流量站,分 別為彰雲橋、溪洲大橋、自強大橋及西濱大橋,對應之河川斷面分別為 86、 52、36 與 12 號斷面。1 號斷面即為出海口。 圖 4.2-1 濁水溪流域系統圖 4.2.1 HEC-RAS 模式說明與參數設定HEC-RAS 為一視窗化整合型軟體,包括圖形使用者介面(graphical user interface, GUI)、水理分析程式集、資料儲存與管理、圖表製作等功能。在 使用上,首先依據河川量測資料給定幾何特性資料,若有其它水工結構物 如橋樑、涵洞、側流堰、溢洪道、閘門、蓄水池等,HEC-RAS 亦可處理上 述之水工結構物對水流之影響;接著,選定欲模擬流況,設定問題邊界條 件,其中邊界條件包括上游邊界、下游邊界、側入流邊界等;最後,即可 模擬河道水位剖面線,HEC-RAS 操作流程如圖 4.2-2 所示。 河 川 斷 面86 彰 雲 橋 溪 州 大 橋 自 強 大 橋 西 濱 大 橋 河 川 斷 面52 河 川 斷 面36 河 川 斷 面12 出 海 口 河 川 斷 面0
36 幾何特性資料 (河道連結系統、斷面 資料、匯流點…) 給定上下游邊界 條件 橋樑、涵 洞、側流堰 溢洪道、閘 門、蓄水池 定量流 變量流 亞臨界流 超臨界流 混合流 亞臨界流 混合流 水理參數輸出 水面剖面線 橫斷面輸出 圖 4.2-2 HEC-RAS 模擬流程 本研究以 HEC-RAS 定量流模式模擬河川洪水位,所需要資料包含河 川斷面幾何資料、曼寧 n 值,上游邊界條件、下游邊界條件、側向邊界條 件等,以下將詳加說明: 4.2.2 模式參數設定 1. 河川斷面幾何資料 河川幾何斷面資料,係採民國 97 年量測之濁水溪斷面測量實測資料, 由下游至上游共 152 個斷面,編號為斷面 1 至斷面 152。本模式採用其中 之斷面 1 至斷面 86,圖 4.2.3、圖 4.2.4 及圖 4.2.5 分別為斷面 1、斷面 45 及斷面 86 之河川斷面剖面圖。觀察此三張圖可發現斷面 1 為出海口之斷面, 斷面中最高點與最低點之高程差約為 7 公尺,而河寬約 6500 公尺;斷面 45 高程相差約為 12 公尺,而河寬約 2500 公尺,而斷面 86 高程相差約為
37 15 公尺,而河寬約 1200 公尺。 本研究以各斷面之最低點為深槽高,繪製濁水溪由彰雲橋至出海口之 底床剖面圖,如圖 4.2.6。可觀察出在靠近扇頂時,濁水溪之底床坡度極陡, 坡度約千分之 3.5;而在中下游扇尾區域其底床較為平緩,坡度約千分之 0.75。 圖 4.2-3 斷面 1 之河川斷面圖 圖 4.2-4 斷面 45 之河川斷面圖 -3 -2 -1 0 1 2 3 4 5 6 7 0 1000 2000 3000 4000 5000 6000 7000 高程 (m ) 河寬(m) 10 12 14 16 18 20 22 24 26 28 0 300 600 900 1200 1500 1800 2100 2400 高程 (m ) 河寬(m)
38 圖 4.2-5 斷面 86 之河川斷面圖 圖 4.2-6 濁水溪底床剖面圖 2. 曼寧 n 值 根據水利署第四河川局提供資料,民國 93 年濁水溪主流之曼寧糙度 值,成果如表 4.2-1 所示。 84 86 88 90 92 94 96 98 100 102 104 0 200 400 600 800 1000 1200 高程 (m ) 河寬(m) -10 0 10 20 30 40 50 60 70 80 90 100 0 16 24 33 43 52 63 70 10 87 25 10 697 12 552 14 708 16 734 18 943 21 046 22 98 5 24 722 26 949 28 91 1 30 854 32 508 34 89 9 36 879 38 854 41 01 9 高程 (m ) 河心累距(m) 深槽高
39
表 4.2-1 濁水溪本流各河段曼寧 n 值計算成果表
斷 面 號
理論公式 Lane Einstein Strickler
採 用 值 公式 公式 公式 R=1 m R=2 m R=3m R=4 m 6 0.022 0.023 0.023 0.024 0.013 0.012 0.013 0.027 12 0.023 0.024 0.024 0.025 0.014 0.012 0.014 0.027 16 0.022 0.023 0.023 0.024 0.014 0.012 0.013 0.027 29 0.024 0.025 0.025 0.025 0.014 0.011 0.015 0.027 33 0.023 0.024 0.025 0.025 0.014 0.012 0.014 0.027 35 0.027 0.027 0.027 0.028 0.017 0.014 0.017 0.027 37 0.023 0.024 0.024 0.025 0.014 0.012 0.014 0.027 39 0.025 0.025 0.026 0.027 0.015 0.012 0.016 0.03 41 0.029 0.028 0.028 0.028 0.015 0.013 0.017 0.03 43 0.032 0.03 0.03 0.03 0.015 0.012 0.018 0.03 45 0.03 0.036 0.037 0.036 0.022 0.015 0.022 0.03 47 0.022 0.023 0.024 0.024 0.013 0.011 0.014 0.03 49 0.031 0.036 0.034 0.034 0.018 0.014 0.021 0.035 51 0.032 0.031 0.031 0.031 0.025 0.019 0.023 0.035 52 0.031 0.034 0.032 0.032 0.026 0.02 0.025 0.035 53 0.032 0.03 0.03 0.03 0.024 0.017 0.023 0.035 55 0.03 0.036 0.035 0.035 0.028 0.023 0.026 0.035 57 0.03 0.036 0.038 0.036 0.029 0.024 0.027 0.035 59 0.029 0.035 0.038 0.038 0.03 0.025 0.028 0.035 61 0.03 0.036 0.035 0.034 0.026 0.019 0.026 0.038
40 63 0.03 0.036 0.036 0.035 0.028 0.022 0.026 0.038 65 0.028 0.035 0.038 0.039 0.03 0.025 0.028 0.038 67 0.021 0.033 0.037 0.04 0.033 0.027 0.03 0.038 69 0.021 0.034 0.037 0.04 0.032 0.027 0.03 0.038 71 0.022 0.033 0.037 0.04 0.033 0.028 0.031 0.04 73 0.022 0.032 0.037 0.039 0.034 0.028 0.031 0.04 75 0.022 0.033 0.037 0.04 0.033 0.028 0.031 0.04 77 0.022 0.032 0.036 0.039 0.034 0.029 0.032 0.04 79 0.023 0.023 0.036 0.039 0.035 0.029 0.032 0.04 81 0.022 0.032 0.036 0.039 0.034 0.028 0.032 0.04 83 0.022 0.032 0.037 0.039 0.029 0.028 0.031 0.04 85 0.022 0.032 0.037 0.039 0.032 0.028 0.031 0.04 3. 上游邊界條件 本研究上游邊界條件為流量邊界條件,在此以彰雲橋之觀測月平均流 量給定,如表 4.2-2 與圖 4.2-7 所示。 圖 4.2-7 彰雲橋 2008 年月平均流量圖 0 200 400 600 800 1000 1200 1月 2月 3月 4月 5月 6月 7月 8月 9月 10月 11月 12月 流量 ( c ms ) 月份
41 表 4.2-2 彰雲橋 2008 年月平均流量表 月份 1 月 2 月 3 月 4 月 5 月 6 月 平均流量(cms) 20.1 24.4 22.4 29.3 56.6 181.2 月份 7 月 8 月 9 月 10 月 11 月 12 月 平均流量(cms) 480.1 276.0 955.2 234.6 27.5 33.6 4.下游邊界條件 本研究下游邊界條件為水位邊界條件,由於在濁水溪出海口並無水位 觀測站,本研究以潮位資料作為下游邊界條件。由於芳苑潮位站距離出海 口最近,在此以芳苑站之潮位資料給定,如表 4.2-3 所示。
42 表 4.2-3 芳苑站月平均潮位高程表 時間 平均潮位 (mm) 最高高潮位 (mm) 時間 平均潮位 (mm) 最高高潮位 (mm) 一月 1865 2548 七月 1996 2538 二月 1809 2511 八月 2139 2894 三月 1945 2433 九月 2170 2738 四月 1928 2355 十月 2099 2580 五月 1921 2438 十一月 1978 2438 六月 2011 2637 十二月 1874 2380 5.模擬案例 本研究以 2008 年作為模擬案例。由於觀測水位站並非直接座落於量測 斷面上,如圖 4.2-8 所示,例如彰雲橋位於斷面 86 及斷面 87 中間,兩斷 面相距 643 公尺,深槽高則有 4.9 公尺之差異(如圖 4.2-9 所示),坡度約千 分之 7.6。在此較陡之坡度下,需針對量測位置需依據深槽坡度適時做校 正。
43 圖 4.2-8 斷面 86、斷面 87 及彰雲橋水位站位置關係圖 圖 4.2-9 斷面 86 及斷面 87 剖面圖 85 90 95 100 105 110 0 200 400 600 800 1000 1200 高程 (m ) 河寬(m) 斷面86 斷面87
44
本研究以彰雲橋、西濱大橋、自強大橋及溪洲大橋四站作為評比對象, 以下分別以一月、四月、七月與十月之模擬水位與觀測水位做比較,如圖 4.2-10 至圖 4.2-13 所示。圖 4.2-14 至圖 4.2-17 分別為四站之觀測水位及模 擬水位。
45 圖 4.2-10 濁水溪一月模擬水位與觀測水位 圖 4.2-11 濁水溪四月模擬水位與觀測水位 0 10 20 30 40 50 60 70 80 90 0 13 88 24 51 38 02 52 63 66 37 78 43 92 28 10 697 12 061 13 741 15 166 16 734 18 386 19 893 21 525 22 985 24 126 25 986 27 360 28 911 30 423 31 648 33 167 34 899 36 331 37 892 39 340 41 019 高程 (m ) 河心累距(m) 1月觀測水位 深槽高 1月模擬水位 彰雲橋 溪州大橋 自強大橋 西濱大橋 0 10 20 30 40 50 60 70 80 90 100 0 13 88 24 51 38 02 52 63 66 37 78 43 92 28 10 697 12 061 13 741 15 166 16 734 18 386 19 893 21 525 22 985 24 126 25 986 27 360 28 91 1 30 423 31 648 33 167 34 899 36 331 37 892 39 340 41 019 高程 (m ) 河心累距(m) 4月觀測水位 深槽高 4月模擬水位 彰雲橋 溪州大橋 自強大橋 西濱大橋
46 圖 4.2-12 濁水溪七月模擬水位與觀測水位 0 10 20 30 40 50 60 70 80 90 100 0 13 88 24 51 38 02 52 63 66 37 78 43 92 28 10 697 12 061 13 741 15 166 16 734 18 386 19 893 21 525 22 985 24 126 25 986 27 360 28 911 30 423 31 648 33 167 34 899 36 331 37 892 39 340 41 019 高程 (m ) 河心累距(m) 7月觀測水位 深槽高 7月模擬水位 西濱大橋 自強大橋 溪州大橋 彰雲橋
47 圖 4.2-13 濁水溪十月模擬水位與觀測水位 圖 4.2-14 彰雲橋觀測水位與模擬水位時序比較圖 0 10 20 30 40 50 60 70 80 90 100 0 13 88 24 51 38 02 52 63 66 37 78 43 92 28 10 697 12 061 13 741 15 16 6 16 734 18 386 19 893 21 525 22 98 5 24 126 25 986 27 360 28 911 30 423 31 648 33 167 34 899 36 331 37 892 39 340 41 019 高程 (m ) 河心累距(m) 10月觀測水位 深槽高 10月模擬水位 彰雲橋 溪州大橋 自強大橋 西濱大橋 80 81 82 83 84 85 86 87 88 89 90 水位高程 (m ) 時間(月) 模擬水位 觀測水位
48 圖 4.2-15 溪州大橋觀測水位與模擬水位時序比較圖 圖 4.2-16 自強大橋觀測水位與模擬水位時序比較圖 15 16 17 18 19 20 21 22 23 24 25 水位高程 (m ) 時間(月) 模擬水位 觀測水位 4 5 6 7 8 9 10 11 12 13 14 水位高程 (m ) 時間(月) 模擬水位 觀測水位
49 圖 4.2-17 西濱大橋觀測水位與模擬水位時序比較圖
4.3 應用衛星影像辨識於濁水溪河道面積
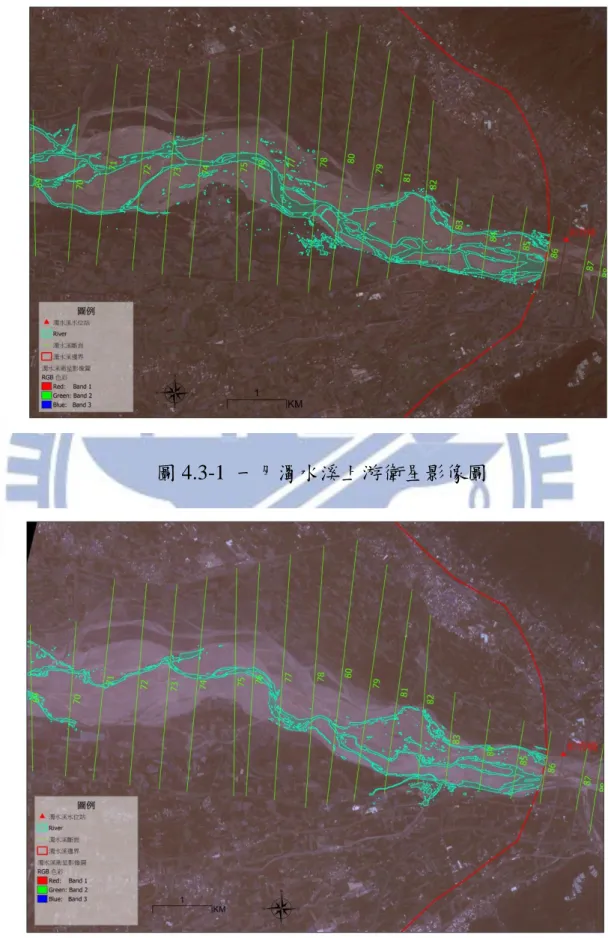
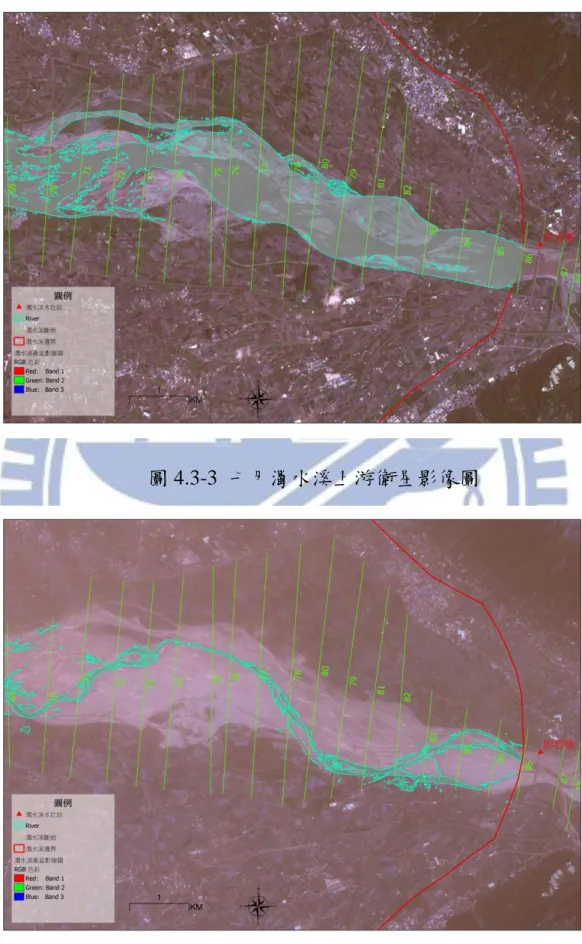
本研究利用福爾摩沙衛星二號之多光譜衛星影像圖,以近紅外線波段 搭配可見光進行河道辨識。本案例採用之衛星影像分別為 2008 年 1/3 至 1/5、 4/15、7/21、7/25、7/26、11/1、11/12 與 11/13 所拍攝之影像,可分別用於 代表四個季節之河道變化,衛星影像與河道辨識結果如圖 4.3-1 至圖 4.3-4。 圖中紅色線為濁水溪沖積扇邊界,綠色線為河道斷面,淺藍色區域則 為辨識出之河道行水濕潤區域。由圖中可發現濁水溪河道為辮狀河川,各 季辮狀河道在堤防所限制的行水區域內,有極大之變動幅度。圖 4.3-5 為 各季河道行水濕潤區域,不同顏色範圍即代表不同季節之行水濕潤區域, 可發現各季之河道行水濕潤區域除面積相差極遠外,分布位置亦不斷擺盪, 以上游最為明顯,直至自強大橋後,行水濕潤區域才開始重疊。 0 1 2 3 4 5 6 7 8 9 10 水位高程 (m ) 時間(月) 模擬水位 觀測水位50
圖 4.3-1 一月濁水溪上游衛星影像圖
51
圖 4.3-3 七月濁水溪上游衛星影像圖