行政院國家科學委員會專題研究計畫 成果報告
平面顯示面板(OLED/PLED)瑕疵之機器視覺檢測與分類方法
研究(2/2)
計畫類別: 個別型計畫 計畫編號: NSC94-2213-E-009-027- 執行期間: 94 年 08 月 01 日至 95 年 07 月 31 日 執行單位: 國立交通大學工業工程與管理學系(所) 計畫主持人: 彭德保 報告類型: 完整報告 報告附件: 出席國際會議研究心得報告及發表論文 處理方式: 本計畫可公開查詢中 華 民 國 95 年 10 月 27 日
行政院國家科學委員會補助專題研究計畫成果報告
平面顯示面板(OLED/PLED)瑕疵之機器視覺檢測與分類方法研究
計畫類別:個別型計畫
計畫編號:NSC 94-2213-E-009-027-
執行期間:2004 年 8 月 1 日至 2006 年 7 月 31 日
計畫主持人:彭德保
共同主持人:
計畫參與人員:
成果報告類型(依經費核定清單規定繳交):完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
執行單位:國立交通大學工業工程與管理學系
中 華 民 國 95 年 10 月 5 日
一、 中、英文摘要 本研究計畫的目的,在發展一套適合於 PLED 製程的自動光學檢測系統,能檢測出 PLED 上的瑕疵如:暗點、蓋板刮傷、亮度不均勻、色純度和膠寬過窄等等。而針對暗點、 蓋板刮傷、亮度不均勻與膠寬過窄等缺陷,本研究計畫已經成功設計出一套有效的演算法, 能依據發光點和外觀兩個指標,分為兩類進行檢驗。第一類瑕疵檢驗包括暗點亮度不均之 檢驗,第二類瑕疵檢驗則是考慮 PLED 外觀問題,包括蓋板刮傷及膠寬過窄之檢驗;並且 針對上述兩不同類別的瑕疵檢驗,採用不同的光源來進行取像及檢測。
An AOI system which can inspect the defects such as dark point, surface scratch,
non-uniform luminance, and insufficient rubber width… etc. It also improves the inspection speed and quality. The defects listed above can be classified into two classes by these two indicators. Class I defect is related with PLED luminance, including dark point and non-uniform luminance. Class II defect is related with outward appearance, including surface scratch and insufficient rubber width. Different light sources are used for the image grabbing of different classes. The proposed AOI system can detect the above mentioned defects effectively and robustly.
二、 關鍵詞 電腦視覺、有機電激發光顯示器、瑕疵檢測 三、 前言 隨著各類手持式資訊家電(Information Appliance,IA)產品的興起,扮演人機介面重要 角色的顯示器,未來將突破目前以電腦產品為主的現況。OLED 因為生產所需的資本門檻 較小,且本身有自發光性質(不需背光源、彩色濾光片),可大幅降低成本及顯示模組的厚度, 使其具有更輕薄、高亮度、較無視角限制、高反應速度、低耗電,與製程簡單等優點,眾 多業者看好其未來市場潛力及產品競爭力。 然而於實際量產方面,面臨到良率不佳而無法量產的問題。良率不高起因於 ITO (Indium Tin Oxide)面板的『Array 製程』、「有機膜形成」的兩製程中,即面臨不少技術瓶頸 有待突破;另外一方面則是在封裝及真空部份。由於有機電激發光顯示技術發展時間尚短, 故色彩純度不佳。上述各種造成良率不佳的原因,容易使得成品發生暗點、亮度不均勻、 蓋板刮傷(surface scratch)、膠寬(rubber width)過窄、色純度不一致等瑕疵。目前業者利用傳 統人工目視檢測方式以過濾不良品,並且同時判斷其屬於何種形式之不良品。但由於傳統 人工目視檢測方法存在如:(1) 檢測成果變異大、(2) 受主觀意識影響大、(3) 眼睛容易疲 勞、與(4) 人工成本高漲等問題,成效並不如預期。故透過電腦視覺的自動化光學檢測 (Automatic Optical Inspection,AOI) 來降低檢測成本、提高檢測速度以及減少誤判率,進 而做到產品全數檢驗的理想是必然發展的趨勢。而其檢測效率、效能及品質的一致性,更 勝傳統人工檢測。本研究希望能開發快速、穩定、正確的 AOI 系統來進行 OLED 瑕疵檢測, 以代替傳統人工目視檢測方式,改善 OLED 成品檢測的成效。
四、 研究目的
膠寬不足及色純度不一致等。一片 7cm×4cm PLED (如圖 1.)上約有八千個發光點,以檢測 暗點瑕疵為例,暗點面積需小於 0.01mm2才可視為無暗點瑕疵;以膠寬為例,膠寬必須要 超過 2.2mm,才可視該元件無此類瑕疵。因此藉由本研究計劃所提出的方法來達到檢測上 所要求的規格,並發展自動化檢測以減輕人眼負擔、提升 PLED 產品品質。 綜觀檢測的需求,本研究計畫之目的簡單摘要如下: (1) 針對組成 PLED 之各種不同材料特性及製程所可能產生之瑕疵,探討及設計出適合擷取 有利檢測影像的光源機構。 (2) 針對 PLED 所發生之各類瑕疵,發展適當的演算法以利正確找尋瑕疵與其發生的位置。 圖 1. PLED 樣本 五、 文獻探討
PLED 瑕疵檢測的相關文獻,包括 PLED 製程中的檢測和 PLED 成品的檢測,從文獻 中可以發現各個研究所進行檢測的瑕疵項目及其異同。陳志強[7]針對以噴墨法製作的 PLED 基板上,當 PF(Polyfluoren,一種在 PLED 機版中有發光作用的材料)溶液塗佈在基板 上會有液滴濺出、塗佈不滿、漏噴及溢出等瑕疵進行檢測,其檢測範圍屬於製程中 PF 溶液 塗佈狀況的檢測。江嘉明[4]針對 PLED 成品上的壞點瑕疵,利用面板發光點亮度值進行檢 測。將 PLED 依電路配線方式通電點亮成五種圖樣(pattern),其欲檢查的瑕疵有 shrinking block、erroneous block、excessively bright block、dark block 等,如圖 2.所示。其中 block 指 的是 PLED 的一個發光點。檢測方法是將標準的 PLED 樣本之亮度值和灰階值之間的對照 關係表建立起來,目的是想以單色 CCD 攝影機去衡量 PLED 的亮度值,對待測 PLED 執行 二值化運算,將 block 和背景分割出來,然後計算每個 block 的重心,依照設定的像素值以 每個重心為基準向上下左右延伸成一個新 block,計算每個新 block 的平均灰階值,接著對 照之前建立的亮度-灰階對照表,將平均灰階值轉換成相對應的亮度值,並和標準亮度值比 較來判斷每個 block 是否存在瑕疵。
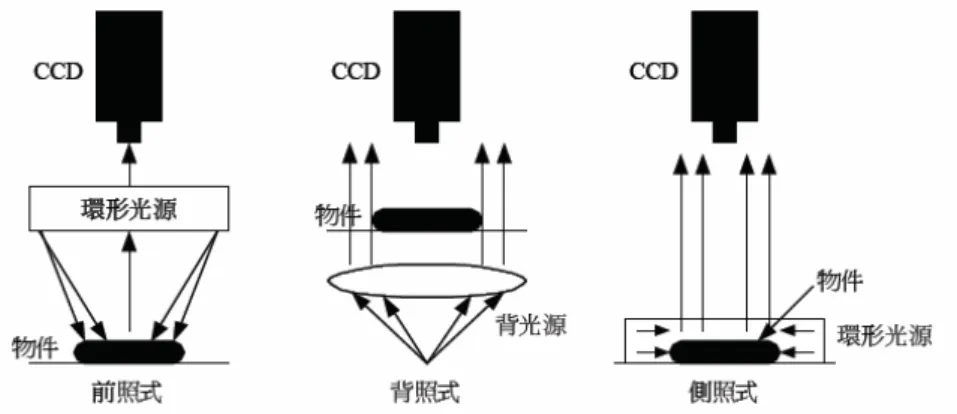
圖 2.江氏所檢測之 PLED 瑕疵影像 在視覺系統架構方面,一個視覺檢測系統包括硬體部分和軟體部分,硬體部分的基本 組成可大致粗分為光源系統、運動控制機構、攝影鏡頭、CCD 電子攝影機、影像擷取卡和 個人電腦等六大單元[2、8],如圖 3.所示。光源系統和運動控制機構是用來輔助 CCD 擷取 待測工件的影像,CCD 和鏡頭則決定了影像的解析度並擷取影像,透過影像擷取卡可以將 影像資料傳輸到工作電腦上,再進行軟體的分析運算。 圖 3.典型的視覺系統基本組成 在視覺檢測系統中,光源系統對整個檢測環境影響深遠,光源照明的主要目的在於利 用適當光源突顯待測物的物體或瑕疵特徵,提高影像的對比及細節,將重要的部份強調出 來。光源照明系統若設計得當,便能減少影像額外的前處理時間,降低後續減測演算法的 複雜程度。光源系統包含光源種類與光源的架設,目前在檢測系統中常用的光源種類有: 鹵素燈(Halogen)、高周波螢光燈、LED 燈源、金屬燈泡和雷射光元等,而常見的光源架設 方式(或打光方式)有下列幾種[1、5、6、10]: 1. 前照式(Front lighting):光源與 CCD 攝影機在物體之同側,利用光線反射強弱的不同, 常作為檢測物體表面特徵時之照明。 2. 背照式(Back lighting ):光源與 CCD 攝影機在物體之異側,利用背照式產生出對比強 烈的物體輪廓線,常作為物體尺寸檢測之用。
3. 側照式(Side lighting):光源放在物體的側面,光源的照射方向與物體平面近乎平行。 常作為突顯待測物體幾何性質之用。 圖 4.為常見的打光方式示意圖,本研究計畫將參考這些打光技巧,以進行光源架設。 圖 4.常見打光方式示意圖 有機發光二極體基本元件結構為如圖 5.所示之三明治結構,有機發光層(PF 層)被上層 負極金屬(Metal 層)及下層 ITO 玻璃之透明電極所夾集而成。其發光元李主要利用電流使電 子及電洞分別由正、負極出發,並注入兩個電極間的有機薄膜區,陽極以功率函數較高的 ITO(Indium Tin Oxide)透明導電玻璃膜、陰極通常選擇功率函數較低的金屬,如 Mg、Al、 Ca 等,然後在發光層相遇結合,當伊對電子與電動複合時,便可將多的能量以光的形式釋 放,而產生發光現象。發光的顏色則取決於有機發光層的材料[10]。
圖 5.有機發光二極體基本元件結構
PLED 其元件結構如上所述,可分為:金屬層(Metal Layer)、有機層(PF Layer)及 ITO 透明玻璃電極。產品瑕疵可能發生待測物體的任意結構上,因此本研究計畫利用光線不可 穿透金屬層的特性,設計出合適之背照式光源系統;依照有機層材料的特性,選擇 UV 紫 外光光源系統擷取 PLED 有機層之影像。
參考文獻
[1] B.G. Batchelor, D.A. Hill, and D.C. Hodgson, Automated Visual Inspection
[2] F. Lisa-Mingo, and J. Carrabina, “On the Application of Configurable Computing to Real-time Industrial Visual Inspection”, Emerging Technologies and Factory Automation, 1999.Proceedings. ETFA ‘99. 1999 7th IEEE
[3] Matrox Imaging Library User Guide version 7, pp.111-135, pp.275-303, 2002. [4] 江嘉明,“高分子聚合物發光二極體之電腦視覺輔助瑕疵檢測系統”,國立台灣大學資 俊工程研究所碩士論文,2003. [5] 泰洛科技股份有限公司,http://www.nowa.com.tw,2004 [6] 梁有燈,“機器視覺在 BGA 銲球尺寸量測上之應用”,私立中華大學機械與航太工程 研究所碩士論文,1999. [7] 陳志強,“影像處理技術應用於 PLED 噴墨基版瑕疵檢測”,國立中央大學資訊工程研 究所碩士論文,2003. [8] 陳賢義,“視覺技術在線上檢測之應用”,自動化感測技術專輯,機械工業雜誌六月號, pp.267-279,1993. [9] 劉建宏,“光學影像檢測模組之開發與應用”,國立台灣大學機械工程學研究所碩士論 文,2002。 [10] 顧鴻壽,“光電有機電激發光顯示器技術及應用”,新文京開發出版有限公司,pp.99, 2001. 六、 研究方法 本研究計畫將 PLED 瑕疵檢測項目依據發光點和外觀分為兩大類進行檢測。第一類為 PLED 發光點檢測,包括按點、亮度不均等檢測;第二類為 PLED 外觀檢測,包括表面刮 傷、膠寬不足等檢驗。而僅採用一種光源無法將全部的瑕疵突顯出來,所以下面會針對所 分類的瑕疵進行光源系統及演算法的說明。 A. PLED 發光點檢測:
PLED 瑕疵項目主要包括暗點(dark point)及亮度不均(non-uniform luminance)兩種。雖然 於成品檢驗中,只要發現有瑕疵立即報廢,但為了提高製程良率,有必要分析瑕疵產生原 因,而暗點瑕疵的發生,可歸因於 PF 層、Metal 層破洞或是異物導致。所以除了找出暗點 瑕疵,還需進一步檢驗 PF 層和 Metal 層。 本研究將暗點瑕疵分成三個項目來檢測,第一個項目稱為點燈測驗;第二個項目稱為 PF 層檢測;第三個項目稱為 Metal 層檢測。首先要確認暗點瑕疵是否發生,所以要先把 PLED 通電點亮來進行檢查;如果有發生,再進行第二個項目和第三個項目的檢查。而單靠將 PLED 點亮所取得的影像並無法判斷暗點瑕疵發生再 PLED 結構中的哪一層?所以,必須針對每 一層的特性,分別設計不同的光源系統,進行瑕疵的檢測與分類。藉由檢測 PLED 結構的 每一層,可以幫助生產者了解哪一層較容易發生暗點瑕疵,然後再針對此結構加以改善, 以提高製程良率。 A1.點燈檢測 點燈測驗就是把 PLED 通電點亮後,檢查在發光點上是否產生暗點的瑕疵。本研究設 計一治具(圖 6.)來置放 PLED,並通以 3V 電壓使之發光進行取像。擷取到的影像如圖 7.所 示。
圖 6.PLED 瑕疵檢測取像機構設計 圖 7.通電點浪後擷取到的 PLED 影像 針對暗點檢測演算法,本研究提出兩種檢測方法,分別命名為「填 Gap 二值化分割法」 和「暗點抽取法」,茲分述如下: A.1.1「填 Gap 二值化分割法」所使用的方法步驟如下: (1) 影像失真校正 一般鏡頭所擷取到的影像存在著變型失真的問題,常見的失真有桶型失真(Barrel distortion)和枕型失真(Pincushion distortion),如圖 8.所示: 圖 8.失真種類 為了避免失真所造成量測上的誤差,本研究採用[3]的失真校正方法,該方法主要是先 利用網格(Grid)做校正,得到校正參數,再將失真影像校正回來。首先,利用一張自訂的, 以圓點組成的格子影像,進行影像校正的設定作業,Grid 是一張以黑色、圓點矩陣組成的 影像(圖 9.),其設計條件為: 1. 圓形的半徑 r:6 ≦ r ≦ 10 pixels 2. 兩圓形圓心距離 18 – 32 pixels 3. 兩圓周距離至少 6 pixels
圖 9.校正用 Grid 影像 依據這些限制,搭配所需檢析度與視野(FOV)大小,繪出所有的圓形。當 Grid 製作完 成後,透過 CCD 擷取其影像,此時要注意的是 Grid 和鏡頭的距離要等於待測物和鏡頭的 距離。對擷取到失真的 Grid 影像,利用[3]的校正方法,將失真的 Grid 影像較正回來,此 時鏡頭的失真校正參數已經被記錄起來,所以當以此鏡頭在相同的距離下擷取待測物的影 像,便可以此校正參數進行校正。 (2) Stripe Method [3]
利用定義如圖 10.之 Stripe Marker,於搜尋範圍內(稱為 measurement box)之影像,對影 像做水平或垂直正投影,將投影所得之灰階度累計值(圖 11.),計算 edge value。Edge value 是兩相鄰投影值的差,當其值大於設定的 Threshold,表示此處有 edge,接著能找出合乎定 義之 Stripe Marker。根據像素灰階值的變化,在影像上面找出某些特徵稱之為“markers”。 當尋找到特定的 marker 之後,便回傳其空間參考位置。
圖 10.Stripe marker 圖 11.垂直方向投影的像素累計
以上述方法將 PLED 垂直和水平的 Gap 位置偵測出來並紀錄之。水平與垂直的 Gap 量測使 用不同顏色表示而得的結果如圖 12.所示。
圖 12.對圖 7.量測後結果 圖 13.填完 Gap 所得到的影像 (3) Gap 填補 將偵測出來的 Gap 以灰階值 255 填滿,如圖 13.所示。 (4) 局部二值化 影像二值化是根據所選定之臨界值(Threshold Value),將灰階影像中各像素點(Pixels)之 輝接直歸為兩類的基本影像處理方式。一般將此二灰階值分別設為 255 與 0,即白色與黑 色。二值化轉換運算式如下(式 1.): ⎩ ⎨ ⎧ > = ⇒ otherwise Value Threshold y x f if y x f Binary y x y x f , 0 ) , ( , 255 ) , ( ) , ( ) , ( 為影像上座標 之灰階值: 令 (式 1.) 因 PLED 可能產生亮度不均的瑕疵,所以無法以單一的閥值,將瑕疵和背景分割出來, 因此本研究採用局部二值化方式,將 PLED 分成 16(行)×32(列)個子區塊(Block),每個子區 塊涵蓋 4×4 的發光點(Cell),如圖 14.所示。統計這些子區塊的灰階值得到灰階直方圖,然 後選擇適當的灰階直對影像執行二值化,將瑕疵與背景分割出來,二值化分割後影像如圖 15.所示: 圖 14. PLED 二值化區塊分割示意圖 圖 15. 圖 7.二值化結果 (5) Blob Analysis 將二值化後的影像執行 blob 分析,若 blob 面積大於所設之面積下限值,則將此區域 以顏色圈選出,並列出瑕疵的重心位置與面積大小等等資訊,此即瑕疵資料。如圖 16.對圖
15.執行 blob 分析,以瑕疵重心為中心點並且在原影像畫出紅色矩形方框將瑕疵表示出來。 圖 16.Blob 分析結果 A.1.2「暗點抽取法」所使用的方法步驟如下: 在說明本演算法前,由於必須先將影像作負片轉換,而負片轉換的原理說明如下: 灰階在範圍[0,L-1]的影像,可使用式 2.轉換得到轉換後的灰階值,而得到負片影像 r L s=( −1)− ,s 為負片轉換後的灰階值;r 為原始影像灰階值 (式 2.) (1) 影像負片轉換 擷取 PLED 點燈影像後,進行負片轉換如圖 17.: 圖 17.(a) 暗點瑕疵影像 圖 17.(b)負片轉換後影像 圖 17.影像負片轉換說明 (2) 型態學運算(Morphology) 第一步先設定結構元素(Structure element),若以瑕疵當作欲取出的特徵(feature),而以 Gap 為所要過濾之背景,則結構元素的大小要大於瑕疵並小於 Gap。以此原則進行型態學 上的斷開運算(Open)時,先對影像進行侵蝕運算(Erode),瑕疵會被侵蝕而不會影響到 Gap。 垂直 Gap 寬度約佔 3 個像素,而水平 Gap 約佔兩個像素,所以本研究所採用之結構元素為 15×1 及 1×15 的矩形,分別對暗點瑕疵影像(圖 17.(b))進行斷開運算,其結果影像如下圖 18.(a) 與 18.(b)所示。從途中可以看到瑕疵被結構元素侵蝕,而背景(Gap)則被保留下來。
圖 18.(a) 以垂直結構元素進行斷開運算 圖 18.(b) 以水平結構元素進行斷開運算 (3) 影像合併 將上列圖 18.(a)與圖 18.(b)合併如圖 19.之影像,可得到一無暗點瑕疵之影像 圖 19. 將圖 18.(a)與圖 18.(b)合併之結果 (4) 影像相減 兩張影像 f(x,y)和g(x,y)之差可以表示成 ) , ( ) , ( ) , (x y f x y g x y h = − (式 3.) 將圖 17.(b)對圖 19.相減之結果如下圖 20.所示 圖 20. 圖 17.(b)對圖 19.相減結果 (5) 自動二值化分割 將相減完後的影像做子影像切割,分割方式同於「填Gap 二值化分割法」,比較子區 域中的最高灰階值,含有瑕疵的子區域最高灰階值比無瑕疵部分來的大,統計這些子區域 的最高灰階值,求其平均值作為分割之閥值依據,例如圖21.為圖20. 之分割子區域示意圖, 而其最高灰階值列於表1.中,求其平均值為38,故以38 為閥值,分割之結果如圖22.所示, 以此方式,作為暗點抽出法檢測之自動二值化分割依據。
圖21. 圖20.之子影像分割示意圖 表1. 各子區域中之最高灰階值 圖 22. 圖 20.取閥值 38 之分割結果 (6) Blob Analysis 將二值化後的影像先執行 Close 運算,使得同一瑕疵較具完整性,然後再執行 Blob 分 析計算其面積大小,如圖 23.所示,面積等資料列於表 2.,最後依據所要求的檢測規格下限, 判斷面積是否超過下限。 圖 23. 執行 Blob 分析結果 表 2. Blob 面積大小 分析填完 Gap 的子影像,可以發現,某些暗點實際上和發光點的灰階差異並不不大如 圖 24.之說明,如此會造成二值化閥值不易選擇,但採用「暗點抽取法」可以克服此問題, 故這個部份本研究計畫採用「暗點抽取法」作為暗點檢測之演算法。
圖 24.(a) 暗點對比不高 圖 24.(b) threshold=75,暗點沒有被分割出 圖 24.(c) 之灰階直方圖 圖 24. 暗點對比不高說明 A2.PF 層檢測系統 PF 層因材料特性,能以紫外光激發,故本研究採用 UV 光取像,以側向光方式打光, 示意圖如圖 25.,取像結果如圖 26.所示。從圖 26.可以發現,在沒有塗佈到 PF 溶液的地方, 其影像灰階度較低,有明顯的輪廓。 圖 25. PF 層瑕疵檢測架構示意圖 圖 26.PF 層瑕疵影像 A3.Metal 層檢測光源系統 因為 Metal 層為不透明金屬所組成,若金屬有破損的情形,經由背光照射,會有穿透 現象。故本研究以背光方式取像,採用高頻之螢光燈管,並加上壓克力散射板將光線均勻 分散。示意圖如圖 26.,取像結果如圖 27.所示。
圖 26. Metal 層瑕疵檢測架構示意圖 圖 27. 以背光光源所取得之 Metal 層瑕疵影像 A4.PF 層和 Metal 層檢測演算法 PF 層和 Metal 層的檢測演算法,先將擷取到的瑕疵影像暫存起來,利用型態學運算將 瑕疵侵蝕掉,然後再與原瑕疵影像相減,便可找出瑕疵。本演算法所使用的方法步驟如下 列: (1) 型態學運算(Morphology) 用 15×1 的矩形結構元素分別對 PF 瑕疵影像(圖 26.)及 Metal 瑕疵影像(圖 27.)運算,其 結果如圖 28.和圖 29.。從圖 28.中可以看到瑕疵輪廓被結構元素侵蝕,圖 29.則是瑕疵被侵 蝕消失,而背景(Gap)被保留下來。 圖 28. 圖 25.經 1 次 Open 運算結果 圖 29. 圖 27 經 1 次 Open 運算結果 (2) 影像相減(Subtract) 對原始瑕疵影像執行型態學的斷開運算已經將瑕疵影像的特徵去除,接著將原始影像和斷 開運算後的影像做影像相減,,即可將兩張影像中相同處刪除而得到差 異處,也就是得到只有瑕疵的影像,其結果如圖30.與圖31.所示
圖30. 圖25.與圖28相減結果 圖31. 圖27.與圖29相減結果 (3) 影像二值化(Binarization) 使用適當的臨界值將影像二值化,可以區分瑕疵點與背景點,藉由分析相減完後影像 的灰階直方圖(Histogram),得到PF層和Metal層背景灰階分佈狀況,約在0~20左右的灰階 值,所以選擇臨界值30 將瑕疵與背景區分出來,其結果如圖32.和圖33.所示。 圖 32. 圖 28 二值化結果 圖 33. 圖 29.二值化結果 (4) Blob Analysis PF 層瑕疵經二值化後會變得破碎不完整,利用型態學的閉合(Close)運算將瑕疵補 起來。如圖 34.為對圖 28.以 11×11 的結構運算子執行 2 次閉合運算結果。 圖 34. 圖 28 執行閉合運算結果
將二值化後的影像執行 blob 分析,其中若 blob 面積大於 blob 面積之下限值,將此區 域以顏色篩選出,並列出位置和面積大小等資訊,此即瑕疵資料。如圖 35 和圖 36.表示設 定面積下限值為 16 並對圖 33.與圖 34.執行 blob 分析結果,以藍色將其輪廓表示出。
圖 35. 圖 34.Blob 分析結果 圖 36. 圖 33.Blob 分析結果 A5. 亮度不均勻檢測演算法 針對 PLED 亮度的均勻度,本研究計畫探討其相對不均勻問題,亦即對一片 PLED 本 身的亮度均勻度進行檢測,主要想法是在子區塊間以亮度最高值作為指標,然後進行比較。 其演算法如下: (1) 分割 PLED:將本研究計畫的 PLED 顯示區域 64(行)×128(列)個發光點,以 4× 4 個發光點分割成為 16×32 個子區塊。 (2) 求子區塊直方圖:求得每個子區塊中的灰階值中最高者並紀錄下來。 (3) 區塊灰階度比較:以每個子區塊之最高灰階值代表該子區塊的亮度,與其相鄰 4 子 區塊比較灰階值差異。而因人眼對 10 個灰階度以下的差異變化較不容易察覺,所以 將其檢驗標準(即差異)直的設定訂為 10;亦即若該子區塊之最高灰階值與其相鄰 子區塊之最高灰階值差異在 10 個灰階值以上,認定該區域有亮度不均勻的現象。 為避免兩兩比較可能造成漸層式的灰階差異無法判別,例如表 3.,第一行和第二行差 異以及第二行和第三行差異皆在標準之內,但第一行和第三行差異超出標準,因此,以兩 兩比較方式會有上述之問題,故會先採用大範圍的分割比較,即將 PLED 劃分為 4 個子區 域,然後互相比較之,若差異大於 10 個灰階值,即表示有不均勻情形,若大分割沒有判斷 不軍,再以上述小範圍分割進行檢測。 表 3.灰階漸層差異說明 B. PLED 外觀檢測: B1. 表面刮傷檢測光源系統 本研究利用同軸 LED 光源進行取像,此光源系統原理為使用一個半透鏡以 45 度角置 於 CCD 攝影機前方,從鏡子旁打擴散光,一半的光線會經由鏡子反射到物體上,然後從物
體反射回來的光線,一半會穿過鏡子在 CCD 成向。此種同軸光可以很均勻的照射在物體表 面,而物體表面的特徵可以明顯地被突顯出來。檢測架構示意圖如圖 37.所示,取像結果如 圖 38.所示。 圖 37.表面刮傷檢測示意圖 圖 38.表面刮傷瑕疵影像 B2. 表面刮傷檢測演算法 若將瑕疵影像進行黑白或負片轉換(Inversion),則轉換後影像近似於 metal 曾經由背 光取得影像,因此可以使用 metal 層瑕疵檢測演算法進行表面刮傷的檢驗。本演算法各部 奏結果如圖 39.所示: (a) 表面刮傷瑕疵影像 (b) (a)經由負片轉換所得影像 (c) (b)執行 1 次 Open 運算結果 (d) (b)和(c)相減結果 圖 39. 表面刮傷演算法各步驟執行結果
B3. 膠寬檢測光源系統 在 PLED 發光區周圍的膠分為內、外膠,其中內膠為乳白色不透明而外膠呈線白色透 明如圖 40.所示。利用背光的方式可以將內、外膠的輪廓顯現出來,甚至當內膠上附著異物 時也能突顯異物的輪廓,所以在檢測膠寬時,採以背光方式照明,擷取影像如圖 41.所示: 圖 40. PLED 內外膠 圖 41. 利用背光所擷取到的膠寬影像 B4. 膠寬檢測演算法
本演算法主要利用[3]的 Find Stripe Method 來計算膠寬,步驟列舉如下:
(1) 決定量測範圍:如圖 42.所示,上膠位置在 PLED 發光區的上下左右側,所以針對這 四處含有膠的位置進行寬度的量測,可以省掉對不必要的位置進行量測,進而提高 檢測速度。將四處的將寬分成上膠寬、下膠寬、左膠寬與右膠寬,分別對這四處設 定量測範圍。由於再按點檢測時已經記錄了發光點的位置資訊,所以利用 PLED 發 光區位置資訊,決定膠寬的量測範圍。 圖 42. PLED 上膠位置示意圖
(2) 設定量測方向:因為上膠位置為發光區上、下、左、右處,所以在量測左右側的膠 寬要設定方向為垂直方向,而量上下冊的膠寬要設定方向為水平方向。
(3) 設定 Find Stripe Method 中所需要的圖樣資訊:
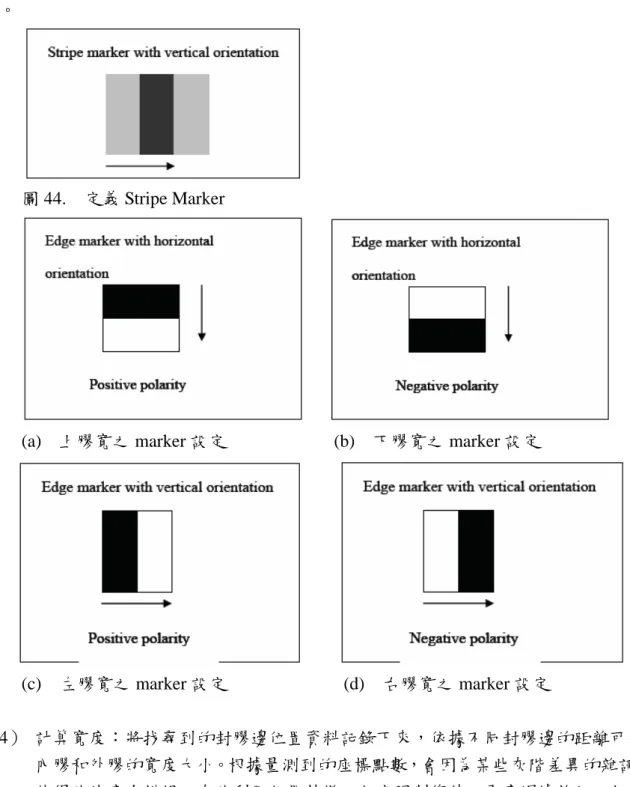
內膠部分,設定 marker 如圖 43.之 Stripe marker,亦找尋灰階變化度由高到低再由低 到高的特徵。而外膠部分依照上下左右分別設定如圖 44.(a、b、c、d)所示之 Marker 種 類。
圖 44. 定義 Stripe Marker
(a) 上膠寬之 marker 設定 (b) 下膠寬之 marker 設定
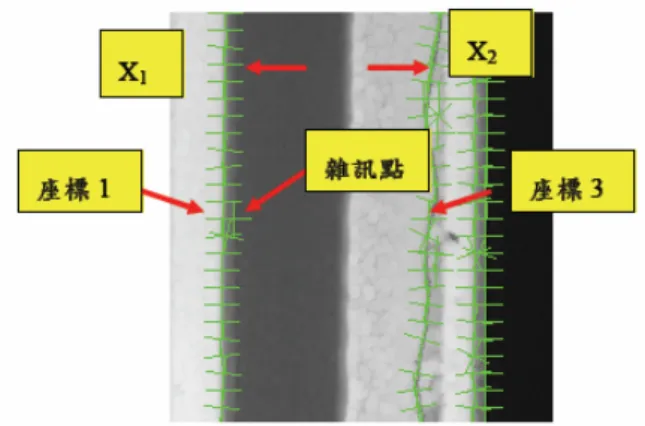
(c) 左膠寬之 marker 設定 (d) 右膠寬之 marker 設定 (4) 計算寬度:將找尋到的封膠邊位置資料記錄下來,依據不同封膠邊的距離可以得到 內膠和外膠的寬度大小。根據量測到的座標點數,會因為某些灰階差異的雜訊變化, 使得此法產生錯誤,在此利用位置特徵,訂定限制條件,再度過濾雜訊,如圖 43. 所示:
圖 44. 右側膠寬部分擷取圖 (5) 判斷膠寬寬度是否低於標準:對所求得的膠寬寬度與標準值比較,如果低於標準值 則將該段膠寬顯示出來。 七、結果與討論 本研究計畫設計與開發出一套可檢測 PLED 亮度不均、暗點、表面刮傷和膠寬不足等 瑕疵的自動光學檢測系統,包含硬體架構概念與軟體演算法,其中暗點檢測可進一步分析 暗點瑕疵成因為何,對於提供資訊回饋給製程參考,相當助益。 在亮度不均檢測的部分,本研究提出以最高灰階值為局部子區域的亮度指標,與相鄰 子區域比較;在暗點檢測部分,以型態學和影像相減的方法,有保留瑕疵的特徵,並且由 於和自身相減,不精確定位,為此法之優點。在膠寬部分則以 Find Stripe Method 的方法精 準計算內、外膠寬度,及內膠和陰極的距離,經過實驗驗證後,相信可以導入生產線運作 測試,以協助 PLED 成品檢測。 一張 1600×1200pixel 的影像其各個檢測項目的時間整理於表 4.,本系統對於成品檢測 速度與人工目視檢的三十秒相比,大大提高檢測效率。而在瑕疵歸殼的辦定上更具標準與 一致性。 表 4. 各項目視檢測所需時間整理表 項目 時間(單位:秒) 點燈檢驗 亮度不均 0.9449 暗點檢測 3 PF 層檢測 0.8430 Metal 層檢測 0.8629 外觀檢測 表面刮傷檢測 0.4924 膠寬檢測 1.6 八、計畫成果自評 z 研究內容與原計畫相符程度 本研究內容與原計畫近乎相符,特別在 PLED 的發光點與外觀檢測方面,透過檢 測不但能將缺陷類別檢驗出來,更能進一步瞭解缺陷發生位置,以輔助在製程上 的改良與進步。 z 達成預期目標情況
本研究計畫已達成預期目標,開發出可應用於 PLED 檢測之檢測軟體及硬體,能 檢測出 PLED 的瑕疵類別與瑕疵發生位置。 z 研究成果之學術或應用價值 本研究計畫開發之檢測軟硬體技術,可應用於 PLED 之瑕疵檢測,同時在開發專 用光源系統時所分析不同類型之光源特性,亦可應用於其他相關之研究項目中。 此外, z 是否適合在學術期刊發表或申請專利
本研究計畫已經於收錄在 Journal of Physics: Conference Series, 7th
International symposium on Measurement Technology and Intelligent Instruments, Vol. 13, 2005, pp.353-356。
![圖 2.江氏所檢測之 PLED 瑕疵影像 在視覺系統架構方面,一個視覺檢測系統包括硬體部分和軟體部分,硬體部分的基本 組成可大致粗分為光源系統、運動控制機構、攝影鏡頭、CCD 電子攝影機、影像擷取卡和 個人電腦等六大單元[2、8],如圖 3.所示。光源系統和運動控制機構是用來輔助 CCD 擷取 待測工件的影像,CCD 和鏡頭則決定了影像的解析度並擷取影像,透過影像擷取卡可以將 影像資料傳輸到工作電腦上,再進行軟體的分析運算。 圖 3.典型的視覺系統基本組成 在視覺檢測系統中,光源系統對整個檢測環境影響](https://thumb-ap.123doks.com/thumbv2/9libinfo/8434147.181403/5.892.134.412.95.373/面一個視覺系統包系統運決定影像透過影像系統基本組成系統對影響.webp)