國
立
交
通
大
學
電控工程研究所
碩
士
論
文
結合觀測器與微分器技術於機動目標加速度估
測
Acceleration Estimation of Maneuvering Targets via the
Combination of Observer Design and Differentiator
Techniques
研 究 生:呂鈞鈞
指導教授:梁耀文 博士
結合觀測器與微分器技術於機動目標加速度估
測
Acceleration Estimation of Maneuvering Targets via
the Combination of Observer Design and
Differentiator Techniques
研 究 生:呂鈞鈞 Student:Chun-Chun Lu
指導教授:梁耀文 博士 Advisor:Dr. Yew-Wen Liang
國立交通大學電控工程研究所
碩 士 論 文
A Thesis
Submitted to Institute of Electrical Control Engineering College of Electrical Engineering and Computer Science
National Chiao Tung University In Partial Fulfillment of the Requirements
For the Degree of Master In
Electrical and Control Engineering July 2012
Hsinchu, Taiwan, Republic of China
結合觀測器與微分器技術於機動目標加速度估
測
學生:呂鈞鈞 指導教授:梁耀文 博士
國立交通大學電控工程研究所
摘 要
目標機動是影響導引準確度的關鍵因素之一,本論文利用擴張狀態觀 測器與 Super-Twisting 演算法設計觀測器等方式,實現穩定而精確的目標 跟蹤以供後續設計導引律時使用。我們針對實際導引系統中尋標器迴路之 量測雜訊干擾,設計濾波器減弱量測雜訊。此外,本論文基於擴張狀態觀 測器與 Super-Twisting 演算法等方式來設計微分器,實現相位超前用以彌 補濾波所導致之量測輸出的相位損失。模擬結果顯示所提之結合濾波器與 微分器之補償機制能有效降低輸出量測雜訊對估計結果的影響,說明了此 結合技術之有效性。另一方面,本論文基於 Super-Twisting 演算法,利用 其收斂時間估計來選取最佳化參數,所獲得的結果提供觀測器可以快速跟 蹤至目標訊號。Acceleration Estimation of Maneuvering Targets via
the Combination of Observer Design and
Differentiator Techniques
Student:Chun-Chun Lu Advisor:Dr. Yew-Wen Liang
Institute of Electrical and Control Engineering
National Chiao Tung University
ABSTRACT
Target maneuvering is one of the key factors that affects guidance accuracy. This paper applies an extended state observer and a Super-Twisting algorithm observer (STO) to achieve a stable and precise target tracking for the follow-up guidance law design. For the situation that the measurement noise of seeker in the practical guidance system is large, a linear filter is designed to attenuate the measurement noise. Besides, a differentiator which is composed of extended state observer and sliding mode technique is also presented to achieve the phase advance to cover the phase lag caused by the filter. Moreover, a methodology to select a set of better parameters for STO is presented. Simulation results demonstrate the benefits of the proposed scheme.
誌 謝
首先要感謝我的指導教授梁耀文博士,在兩年的研究生活中,老師紮 實的專業知識以及嚴謹的研究態度,使我受益良多,更重要的是,老師慈 悲心更讓我在待人處事各方面,獲得許多的體悟,以及老師對學生的關心 讓我感到溫暖,由衷地感謝老師。接著要感謝我的口試委員廖德誠博士、 陳科祥博士和陳俊宏博士給予寶貴的建議與指導,使得本論文更加完整且 嚴謹。 接著要感謝實驗室學長學弟們,徐勝均學長、林立岡學長、陳智強學 長以及鄭旭志學長及吳榮人及徐君豪,謝謝你們分享過來人寶貴的研究經 驗,使得我在研究過程能夠更加順遂,並在我遇到任何難題時總是提供專 業的意見以及實質的幫助。再來是實驗室的同窗,仰靚以及弘儒,兩年的 研究生活我們總是能夠一起努力,互相鼓勵,謝謝你們。再來是學弟們, 逸庭、詠鈞、俊宇以及國欽,謝謝你們在我苦思時,適時的給予我建議以 及協助,使我能夠順利的突破難題。以及我的好友豐池、維德、奕君、郁 瑄,謝謝你們給予我力量,繼續的向前邁進,沒有你們的鼓勵與幫忙,我 的論文不可能順利完成。 最後要感謝我的家人,外公,爸爸以及媽媽,兄姐與弟弟,以及阿姨 與姨丈和表姐及表弟妹們。謝謝你們始終全力支持我拿到各階段的學位, 沒有你們,沒有現在的我,你們總是給我最大的鼓勵,讓我可以毫無後顧 之憂,並在學業上努力地勇往直前,謝謝你們,你們辛苦了!在此,僅將 這論文獻給你們。呂鈞鈞 于新竹交大
101 年 7 月
目 錄
中文摘要 ... i 英文摘要 ... ii 誌 謝 ...iii 目 錄 ... iv 圖 目 錄 ... vi 表 目 錄 ...viii 第1 章 簡介 ... 1 1.1 研究背景與動機... 1 1.2 論文架構... 3 第2 章 預備知識 ... 4 2.1 擴張狀態觀測器... 4 2.2 Super-Twisting演算法 ... 12 2.3 飛彈與目標相對運動模型... 15 第3 章 機動目標加速度估測之應用 ... 18 3.1 應用擴張狀態觀測器於目標加速度估測... 19 3.2 應用Super-Twisting演算法於目標加速度估測 ... 22 3.3 機動目標加速度之模擬... 25 3.3.1 系統模擬設計與建立simulink... 25 3.3.2 模擬結果... 26 第4 章 考慮真實導引系統存在輸出量測雜訊之機動目標加速度估測 ... 38 4.1 問題描述... 39 4.2 尋標器雜訊放大效應... 41 4.3 尋標器雜訊干擾與補償... 44 4.3.1 雜訊濾除... 444.3.2 相位補償... 45 4.4 含有量測雜訊之目標加速度估測模擬... 55 第5 章 結論與未來研究方向 ... 61 5.1 結論... 61 5.2 未來研究方向... 61 參考文獻 ... 62
圖 目 錄
圖2.1 非線性fal函數示意圖 ... 5 圖2.2(
e e 相平面分區圖1, 2)
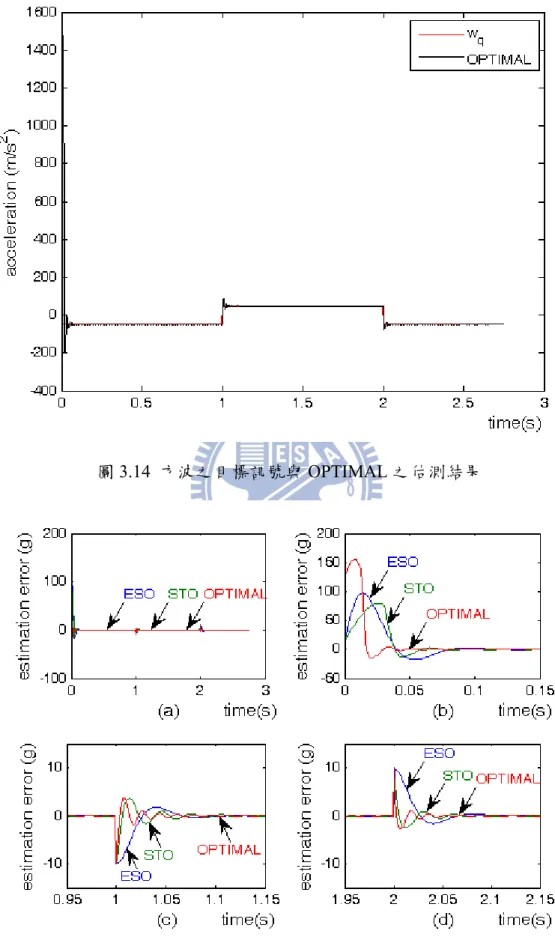
... 6 圖2.3 不等式(2.16)成立時的情況 ... 9 圖2.4 切跳現象示意圖... 12 圖2.5 Super-Twisting之相軌跡(phase trajectory) ... 13 圖2.6 縱向平面飛彈目標相對運動關係... 16 圖3.1 ro最佳選擇示意圖 ... 20 圖3.2 V1/2(t)沿著系統軌跡對時間的響應 ... 24 圖3.3 未考慮輸出雜訊的導引系統方塊圖... 25 圖3.4 目標為正弦波時三種觀測器的狀態誤差時間響應比較圖... 32 圖3.5 當目標為正弦波時Super-Twisting控制律的時間響應圖 ... 32 圖3.6 正弦波之目標訊號與ESO之估測結果 ... 33 圖3.7 正弦波之目標訊號與STO之估測結果 ... 33 圖3.8 正弦波之目標訊號與OPTIMAL之估測結果 ... 34 圖3.9 目標為正弦波時三種觀測器之觀測誤差的時間響應比較圖... 34 圖3.10 目標為步階時三種觀測器的狀態誤差時間響應比較圖... 35 圖3.11 當目標為步階時Super-Twisting控制律的時間響應圖 ... 35 圖3.12 方波之目標訊號與ESO之估測結果 ... 36 圖3.13 方波之目標訊號與STO之估測結果 ... 36 圖3.14 方波之目標訊號與OPTIMAL之估測結果 ... 37 圖3.15 目標為步階時三種觀測器之觀測誤差的時間響應比較圖... 37 圖4.1 尋標器模式示意圖... 39 圖4.2 考慮輸出雜訊的導引系統方塊圖... 40 圖4.3 彈目相對距離與量測雜訊之關係... 40圖4.4 尋標器追蹤迴路方塊圖... 41 圖4.5 利用線性濾波器濾除輸出雜訊之響應圖... 44 圖4.6 相位補償方塊圖... 45 圖4.7 利用微分器跟蹤f1 之微分訊號之比較圖 ... 46 圖4.8 利用微分器跟蹤f2 之微分訊號之比較圖 ... 47 圖4.9 利用微分器跟蹤f3 之微分訊號之比較圖 ... 47 圖4.10 基於ESO之頻率響應圖 ... 49 圖4.12 衍生 STO 系統收斂軌跡 ... 50 圖4.13 基於 STO 之頻率響應圖 ... 51 圖4.13 基於STO之頻率響應圖 ... 51 圖4.14 結合ESO與STO實現帶通濾波 ... 52 圖4.15 結合ESO與STO提取中頻訊號之響應圖 ... 52 圖4.16 結合ESO與STO提取輸入及其微分訊號之方塊圖 ... 53 圖4.17 結合ESO與STO補償相位損失 ... 54 圖4.18 利用ESO補償相位損失之比較圖 ... 54 圖4.19 存在量測雜訊時正弦波之目標訊號與基於ESO之估測結果 ... 57 圖4.20 存在量測雜訊時正弦波之目標訊號與STO之估測結果 ... 57 圖4.21 存在量測雜訊時正弦波之目標訊號與OPTIMAL之估測結果 ... 58 圖4.22 存在量測雜訊且目標為正弦波三種觀測器之觀測誤差時間響應比較圖 58 圖4.23 存在量測雜訊時方波之目標訊號與ESO之估測結果 ... 59 圖4.24 存在量測雜訊時方波之目標訊號與STO之估測結果 ... 59 圖4.25 存在量測雜訊時方波之目標訊號與OPTIMAL之估測結果 ... 60 圖4.26 存在量測雜訊且目標為方波三種觀測器之觀測誤差時間響應比較圖.... 60
1 1
表 目 錄
表3.1 目標為正弦波時三種觀測器的狀態 z 與 q& 間誤差收斂狀況比較表 ... 28 表3.2 目標為正弦波時三種觀測器的估測誤差收斂狀況比較表 ... 29 表3.3 目標為方波時三種觀測器的狀態 z 與 q& 間誤差收斂狀況比較表 ... 29 表3.4 目標為方波時三種觀測器的估測誤差收斂狀況比較表 ... 30 表4.1 雜訊之特性 ... 43 表4.2 擴張狀態觀測器之參數與菲波納奇數列 ... 48 表4.3 目標為正弦波時三種觀測器的估測誤差收斂狀況比較表 ... 55 表4.4 目標為方波時三種觀測器的估測誤差收斂狀況比較表 ... 56第 1 章
簡介
1.1 研究背景與動機
目標機動是影響導引精度的關鍵因素之一,提高目標加速度的估測精度,實 現穩定、可靠而精確的目標跟蹤,具有十分重要的意義。在目標估測的研究領域 中,國內外學者已發展出許多純熟的估測方式[1],例如Lee與Wang等人利用擴展 型卡曼濾波器(Extended Kalman Filter,EKF)於彈道估測[2]-[3],Farinac等人針對 再入段(re-entry)彈道目標追蹤介紹了四種非線性濾波器[4],Young與Liaw等人利 用卡曼濾波器(Kalman Filter)與類神經網路(Neural network)辨識飛彈的軌跡[5], 然而上述進行目標軌跡估測時,計算上需迭代,且卡曼濾波器需要精確知道系統 模型與雜訊之統計特性。有鑑於此,我們探討不需要精確的機動目標模型與系統 雜訊之統計特性的方式來建構觀測器。本論文使用的方法有 i) 擴張狀態觀測器(Extended State Observer)及 ii) 滑 模觀測器(Sliding Mode Observer)。擴張狀態觀測器是由韓京清先生所提出[6] -[8], 其 基 本 概 念 是 將 系 統 模 型 不 確 定 性(model uncertainties)和外在干擾(external disturbances)擴張成一個新的狀態,再利用特定的非線性函數做為回授(feedback), 選取適當的觀測器參數從而有效地估測模型不確定性和外在干擾。如果在控制律 中補償擴張狀態的估計值,就有機會實現非線性不確定系統(uncertain nonlinear systems)的回授線性化(feedback linearization),此即所謂的自抗擾控制技術(Active Disturbance Rejection Control,ADRC)。另一方面,由於滑模控制具有反應快速 和對系統之不確定性和外界干擾具有極佳的抑制性能[12]-[13],近年來已經被廣 泛地應用在控制理論和相關實務上。Utkin首先利用滑模控制(Sliding Mode Control,SMC)的概念,採用了不連續的切換項,應用在觀測器的設計中[9]。Slotine
等人針對非線性系統設計了非線性滑模觀測器[10]。Walcott和Zak等人基於 Lyapunov函數的方法設計滑模觀測器[11],並論證其狀態觀測誤差在滿足一定的 假設情況下是漸進收斂的。為了克服傳統滑模控制切跳(chattering)嚴重的問題, Levant首先提出高階順滑模態(High Order Sliding Mode,HOSM)的概念[14],將 不連續的控制輸入作用在順滑模的高階導數上,並在文獻[15]中有系統地提出幾 種二階滑模控制演算法。Levant於 1998 年提出基於Super-Twsting演算法的二階 滑模微分器[31],極大促進高階順滑模態理論及應用上的發展。高階順滑模態控 制不僅保有滑模控制的優點,同時還能夠解決滑模控制的抖振現象,並有擁有較 高的控制精度。因此,在本論文中,我們採用高階順滑模技術之觀念,並利用 Super-Twisting演算法來進行機動目標之估測。最後模擬驗證上述方法之有效 性。 另外一方面,現有的觀測器雖然可以處理不確定性等問題,但通常都沒有考 慮量測雜訊(measurement noise)干擾對系統輸出的影響,然而這在實際控制問題 中是普遍存在的。一般做法是於控制迴路中使用濾波器對系統輸出進行濾波處理, 以去除雜訊之干擾。但濾波後訊號的幅值(amplitude)與相位(phase)會與系統的真 實輸出產生較大的差異,若直接以此輸出來建構觀測器,勢必造成較大的估測誤 差(estimation error)。有鑑於此,本論文首先利用一階線性濾波器對量測雜訊進行 濾波,然而濾波後導致的系統相位損失,我們進一步利用微分器(differentiator)[31] 提取延遲之訊號及其微分訊號設計補償機制彌補相位損失,同時我們對微分器的 之濾波性能進行分析,考察微分器對正弦訊號的頻率特性,選取適當參數從而得 到精確的目標加速度估計值以供後續設計導引律時使用。
1.2 論文架構
本論文的第二章中,我們將會介紹擴張狀態觀測器與Super-Twisting 演算法理論, 應用Lyapunov 函數的方法證明系統之穩定性。第三章中,首先介紹彈目相對運 動模型,探討導引系統中機動目標加速度估測之問題,並給出二階擴張狀態觀測 器的誤差分析,及Super-Twisting 收斂時間的最佳估計分析,最後比較擴張狀態 觀測器與基於Super-Twisting 演算法這兩種觀測方式的估測精度與收斂速度。在 第四章中,我們將進一步考慮實際導引系統中尋標器雜訊模式所造成系統量測輸 出─視線變化率干擾的問題。並分析微分器對輸入訊號的頻率特性藉以對輸出量 測雜訊進行濾波,並提取其微分訊號用以補償濾波器造成的相位損失,從而實現 目標加速度估測。最後,第五章我們提出結論與未來研究方向。第 2 章
預備知識
2.1 擴張狀態觀測器
擴張狀態觀測器的基本概念是將系統模型不確定性和外在干擾擴張成一個新的 狀態,再利用特定的非線性函數做為回授,選取適當的觀測器參數從而得到系統 不確定對象的估測值。如果在控制律中補償擴張狀態的估計值,就有機會實現非 線性不確定系統的回授線性化(feedback linearization),此即所謂的自抗擾控制技 術(Active Disturbance Rejection Control,ADRC)[6]。擴張狀態觀測器只需要系統 的控制輸入以及系統的量測輸出訊息,不需要不確定對象的資訊,即可有效地估 測系統模型不確定性和外在干擾。 考慮如下一階系統 1 x& = +d bu (2.1) 其中x1∈R1為狀態變數,b∈R1為已知參數,u∈R1為控制輸入, R1為模型 不確定性(model uncertainties)或外在干擾(external disturbances)。控制目標為設計 觀測器跟蹤未知函數d。設計擴張狀態觀測器基本概念就是將未知函數 擴張成 一個新的狀態 d∈ d 2 x ,將系統(2.1)擴張成新的系統如下 1 2 2 x x bu x μ = + ⎧ ⎨ = − ⎩ & & (2.2) 其中−μ為未知函數x 對時間 t 的導函數並且滿足假設 2.1。 2 假設 2.1: 未知函數d對時間 t 的導函數為有界的(bounded),即 d& = − ≤μ σ,∀ ≥t 0。δ 接下來我們針對系統(2.2)設計觀測器如下,並且令 為觀測器中第一個狀態 與 系統 1 e z1 (2.2)狀態 之誤差(error)。 x1 1 2 1 1 2 2 1 1 1 1 ( , , ) z z e bu z fal e e z x β β α = − + ⎧ ⎨ = − ⎩ = − & & (2.3) 其中 、 、 、 為擴張狀態觀測器參數且 , 函數為非線 性函數定義如下,其示意圖如 1 β β2 α δ 0< <1α fal e( , , )1 α δ 圖2.1所示 1 1 1 1 1 sgn( ) ( ) e e fal e e α α δ − ⎧ ⎪ = ⎨ ⎪⎩ 1 1 , , e e δ δ > ≤ (2.4) 其中sgn( )e1 函數定義如下 1 1 sgn( ) 0 1 e − ⎧ ⎪ = ⎨ ⎪ ⎩ 1 1 1 , 0 , 0 , 0 e e e < = > (2.5) 圖2.1 非線性fal函數示意圖 我們知道當0< <1α ,指數函數 e1 sgn( ) α 1 e 在原點附近的變化非常大,因此fal 函數以參數δ =0.4區分線性與非線性區(參照圖 2.1),使其在原點附近的變化較
μ
)
4)
緩,用以避免急遽變化給系統帶來衝擊。同時依據圖2.1可得知參數 越大fal函 數從線性區到非線性區的過渡過程越為平穩,且當誤差之絕對值小於1時,fal增 α 益之絕對值越小,反之亦然。 考察fal函數的意義後,接下來我們針對觀測誤差進行分析。根據(2.2)式與(2.3)式, 我們可以得到觀測器與系統的誤差動態為 1 2 1 1 2 2 ( , , )1 i i i, 1, 2 e e e e fal e e z x i β β α δ = − ⎧ ⎨ =− + ⎩ = − = & & (2.6) 接下來我們要對誤差系統進行穩定性分析。首先我們把 平面分成五個區域, 分別為 ,如(
e e1, 2 0 ~ G G 圖2.2所示。 圖2.2(
e e1, 2 相平面分區圖 其中Gi定義如下(
)
(
)
{
}
(
)
(
)
{
}
(
)
0 1 2 1 0 1 0 2 1 0 1 1 2 1 0 2 1 2 1 2 2 2 1 0 2 1 3 1 2 1 0 2 1 4 1 2 2 2 1 0 2 1 , , ( ) ( ) 2 2 , , 0 , 0, ( ), 2 , , 0 , 0, ( ), 2 G e e e r e r e e r G e e e r e e G e e e e e r e e G e e e r e e G e e e e e r e e β β β β β β β β ⎧ ⎫ =⎨ < − ≤ ≤ + ⎬ ⎩ ⎭ = > ≤ ≤ ⎧ ⎫ =⎨ > ≥ + ≥ ⎬ ⎩ ⎭ = < − ≥ ≥ ⎧ ⎫ =⎨ < ≤ − ≤ ⎬ ⎩ ⎭ (2.7)接下來針對 構造如下之多李雅普諾夫函數(multiple Lyapunov function candidate)如下 1~ G G4
(
)
(
)
(
)
(
)
1 0 1 2 1 2 1 0 1 2 1 0 1 2 3 2 1 0 1 2 ( ) , , 2 ( ) , , 2 ( ) , , 2 ( ) , , 2 e r e e G e e r e e G V e r e e G e e r e e β β β β ⎧ − ∈ ⎪ ⎪ ⎪ − + ∈ ⎪ = ⎨ ⎪ − + ∈ ⎪ ⎪ ⎪− + − ∈ ⎩ 2 4 G (2.8) 根據(2.8)式我們容易驗證V 在 之外為正定函數且全域(global)連續,即V 也在 不同區域交界處都連續,接下來針對誤差系統 0 G (2.6)提出下列定理。隨後我們利 用(2.8)式所構造的V 來證明如下定理 2.1。另外,為了幫助討論,我們引入引理 2.1。 定理 2.1: 誤差系統(2.6)式在假設 2.1 成立的情況下,若V 沿系統軌跡對時間的導數在 之 外均小於零,則系統 0 G (2.6)最終收斂至區域G0。 引理 2.1:[24] 考慮切換系統(switched system)如下( )
i = x& f x (2.9) 其中x∈Rn,i = 1, 2,{
L, N}
。若滿足如下之條件,則系統(2.9)為Lyapunov穩定(stable in the sense of Lyapunov)。
(i) 對於 ,Gi i = 1, 2,
{
L, N}
,UGi =Rn。(ii) 每一個 定義在區域 上。 fi Gi
( )
0,i i
V& x < ∀ ∈x G (2.10)
(iv) 對所有可能的切換序列(switching sequences),假設系統狀態進入區域 之時
間序列為
{
i G}
, i j t j∈N,即 i j t 為系統狀態在第 j次進入Gi之時間,當 1 2 i i j tj t < , 都滿足( )
2( )
1 i i i j i j V t <V t (2.11) 若(2.10)與(2.11)式中的小於“ ”改為小於等於“< ≤”,則系統(2.9)為漸進穩定。 接著繼續完成證明,首先根據(2.8)式可得到(
)
(
)
(
)
(
)
2 1 1 1 2 2 1 1 2 1 1 1 2 2 2 1 1 1 2 2 1 1 2 1 1 1 2 ( ) , , 2 ( - ) sgn( ) , , 2 ( ) , , 2 ( ) sgn( ) , , 2 e e e e G e e e e e e G dV dt e e e e G e e e e e e G α α β β β β μ β β β β β μ β ⎧ − ∈ − + − = − − ∈ − − − + ∈ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎩ 1 3 4 ∈ 1 (2.12) 為方便起見,我們在區域Gi內以符號 來表示Vi V 。 ‧在區域G1中,由於e1>0且e2 ≤βe ,我們將 對時間取導數可得到 V1 1 2 1 1 2 1 1 1 1 1 ( ) ( ) ( 2 2 2 dV e e e e e e dt )e1 β β β β β β β β = − = − + − ≤ −β (2.13) 取充分小的ε >0並令β β ε= 1− 即可使(2.13)為負。且在區域 也會有相同結 論。 3 G ‧在區域G2中,由於採用了 fal e( , , )1 α δ 函數,因此我們需要分兩種情況作討論。 情況一:考慮e1 >δ 對於任意γ ≥ ,可以得到 的等高線方程:r0 e2 2 ( 1 2 e = β e +γ),由圖 2.2我們知道 且 2 0 e > e2 ≥βe1,因此只有e1 <γ 才是屬於這等高線,並且在這線段上 對時間V2的導數為 2 2 1 1 2 1 1 1 1 1 2 1 2 1 1 2 1 1 ( ) sgn( ) 2 ( ( ) ) sgn( ) 2 2 ( ) sgn( ) 2 2 4 dV e e e e dt e e e e e α α α β β μ β β β γ β μ β β β β β γ μ β = − − + − = − + − + − = − − + − 1 e e (2.14) 若希望(2.14)式為負,則必須滿足 2 1 1 2 1 ( ) sgn( 2 2 e 4 e α β β −β − β γ < − +μ β 1) e (2.15) 將前述條件β β ε= 1− 、γ ≥r0、e1 <
γ
、 − ≤μ σ 整理帶回(2.15)式,可以得到 2 2 2 1 1 1 2 2 2 1 1 2 ( ) ( ) ( sgn( ) ) 4 e e α β ε β ε γ β σ β ε β − − − < − e1 − (2.16) 我們將不等式(2.16)的右側視為通過點 1/ 2 ( , α σ β 0)(參照圖 2.3點(1)),以及通過點 (參照 (0,−σ) 圖2.3點(2))的曲線,記為:C1。 並將不等式(2.16)的左側視為通過點 1 2 2 2 1 ( ) ( β ε γ β ε − − , 0)(參照圖 2.4 點(3)),以及通過點 2 2 1 (0, ) 4 β −ε γ − (參照圖2.3點(4))的直線,記為:L1。 圖2.3 不等式(2.16)成立時的情況欲使不等式(2.16)在e1 <
γ
的條件下成立,至少需要圖 2.3平面中點(3)在點(1)的 右側,點(2)在點(4)的上側。亦即, 1/ 2 1 2 2 1 2 (β ε) γ σ α β ε β − > − 且 2 2 1 4 β ε σ − γ − > − ,因此 在0 e< < 範圍內,我們可以得到如下之(2.17)式必可滿足(2.16)式。 1 γ 1/ 2 α σ γ β > (2.17) 另一方面,在− < < 的範圍內,當直線L與曲線Cγ e1 0 1 之差存在極大值,並且此 極大值為負時,必可滿足(2.16)。我們利用偏微分求此差值之導數,可以得到此 點為 1/(1 ) 2 2) 2 1 4 ( αβ α β ε − − 。接下來將此點代回 − (2.16)式可以得到 2 2 2 1/(1 ) /(1 ) 1 2 1 2 2 2 2 2 2 2 2 1 1 1 4 ( ) 4 (( ) ) (( ) ) 4 α α β ε αβ β ε αβ 2 α σ γ β β ε β ε β ε − − − + − > − − − + β (2.18) 取ε =0簡化(2.17)式整理得 /(1 ) 2 1/(1 ) 2 2 1 1 4 4 (1 )( ) α α β α σ γ α α β β − − > − + (2.19) 經由以上的分析可知,對於充分小的ε =0,只要γ 滿足(2.17),(2.19)式,則在 範圍內 2 G 2 0 dV dt < 。因此γ 必須同時滿足(2.17),(2.19)式,亦即 1/ /(1 ) 2 1/(1 ) 2 2 2 1 4 4 max , (1 )( ) α α α β α 1 σ σ γ α α β β β − − ⎧ ⎫ ⎪ ⎪ > ⎨ − ⎬ ⎪ ⎪ ⎩ ⎭ + (2.20) 在此,定義 為最小r0 γ ,也就是 1/ /(1 ) 2 1/(1 ) 0 2 2 2 1 4 4 max , (1 )( ) r α α α β α 1 σ α α σ β β − − ⎧ ⎫ ⎪ ⎪ = ⎨ − ⎬ ⎪ ⎪ ⎩ β ⎭ + (2.21) 同樣地,在區域G4使用前面分析之方式也會有相同的結論。 情況二:考慮e1 ≤δ
和前面討論一樣,對於任意γ ≥ ,r0 2 ( 1 ) 2 e = β e +γ ,e1 <γ 的線段。並且在這線 段上, 對時間的導數為 V2 1 2 2 1 1 2 1 1 1 1 1 2 1 2 1 1 1 2 1 ( ) / 2 ( ( ) ) / 2 2 ( ) / 2 2 4 dV e e e dt e e e e e α α α β β μ β δ β β γ β μ β δ β β β β γ μ β − δ − − = − − + − = − + − + − = − − + − (2.22) 將β β ε= 1− 、 μ σ− ≤ 整理帶回(2.22)式,若希望(2.22)式為負,必須滿足如下 2 1 1 2 1 1 1 2 ( ) ( 4 e e α α β β ) δ σ γ δ β − − − < − (2.23) 我們將不等式(2.23)的右側視為通過點 1 2 ( , α δ σ β − 0)及點(0,− 的直線,記為:Lσ) 2。 並將不等式(2.23)的左側視為通過點 ( ,0)γ 及點 2 1 (0, ) 4 β γ − 的直線,記為:L3。 根據L2、L3 的位置關係,得到欲使(2.23)式成立,至少需滿足 2 1 4 β σ γ − > − 。根 據(2.20)式,可以看出此條件已經滿足。另一方面,我們取另一條過 (0,− 及σ) 2 1 ( ) ( , ) 4 β δ γ δ − 的 直 線L4, 只 要 直 線L2 的 斜 率 β12α δ − 大 於 直 線L4 的 斜 率 2 1 ( ) 1 ( 4 β δ γ ) σ δ − + ,即可以得到在e1 ≤
δ
範圍內,確保L2恆在L3之上。也就是 2 1 2 1 ( ) 1 ( ) 4 α β δ γ σ β δ δ − − + < (2.24) 整理(2.24)式可以得到 2 2 2 1 1 4 4σ β δα γ δ β β > + − (2.25) 當(2.25)式成立時,dV2 0 dt < 。在此,我們定義 為最小的r1 γ ,也就是 2 1 2 2 1 1 4 4 r α β δ σ δ β β = + − (2.26) 對於區域G4使用前面分析之方式也會有相同的結論。故經由以上證明以及透過 引理2.1 可得到誤差系統(2.6)最終收斂至區域G0(參照圖2.2)。2.2 Super-Twisting 演算法
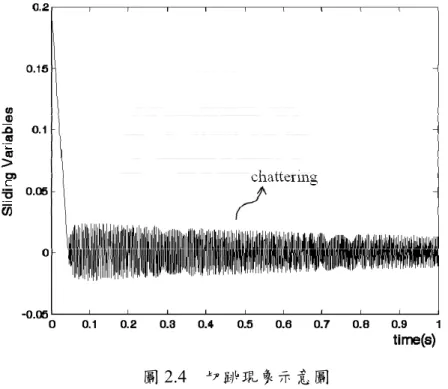
為 了 克 服 傳 統 順 滑 模 控 制(Sliding Mode Control,SMC)中 的 切 跳 現 象
(chattering),如圖 2.4所示。近年來學者提出高階順滑模態(High Order Sliding
Mode,HOSM)的概念[17][19],將不連續的控制輸入作用在順滑模的高階導數上,
此 作 法 不 僅 可 以 有 效 地 消 除 切 跳 現 象[17][18], 同 時 仍 保 有 傳 統 順 滑 模 控 制[12][13]所 擁 有 響 應 速 度 快 、 容 易 實 現 , 以 及 對 於 模 型 不 確 定 性(model uncertainties)或外在干擾(external disturbances)具有強健性等優點。基於此,本論 文採用由Levant所提出之二階滑模控制中的Super-Twisting演算法[15]-[16]。 圖2.4 切跳現象示意圖 接下來我們討論基於Super-Twisting演算法之二階順滑模控制的設計,首先考慮 如下系統 x&= +u d (2.27) 其中 R1為狀態變數, R1為Super-Twisting演算法之控制律, R1為模型 不確定性(model uncertainties)或外在干擾(external disturbances)。控制目標為設計 控制律u使得系統軌跡於有限時間內在其相平面(phase plane)以扭轉(twisting)的 方式收斂至原點,如
x∈ u∈ d∈
圖2.5 Super-Twisting 之相軌跡(phase trajectory) 而(2.27)式中Super-Twisting演算法的控制律 為 u 1 2 u= + u u (2.28) 其中u1 = −k x1 0.5sgn( )x , ,並且 >0、 >0 為控制律之參數。在 這裡我們假設未知函數d對時間 t 的導數為有界的(bounded),即 2 2sgn( ) u& = −k x k1 k2 , 0 d& ≤σ ∀ ≥t (2.29) 若(2.27)式是在Filippov意義下的[20],我們可以採取以下的狀態變換 2 0sgn( ) t y= −d k
∫
τ τd (2.30) 系統(2.27)經由以上的狀態變換後成為如下 0.5 1 2 sgn( ) sgn( ) x k x x y y k x d ⎧ = − + ⎪ ⎨ = − + ⎪⎩ & & & (2.31) 接下來針對狀態變換後的系統(2.31)提出下列定理。 定理 2.2: 對於系統(2.31),若 d& ≤σ,∀ ≥t 0,並且控制律參數滿足如下假設2.2 時,則x與 其對時間的導數x&在有限時間內收斂至原點。 假設 2.2: 控制律之參數滿足k1>2, 3 2 1 1 2 1 1 (4 8) (4 8) k k k k k σ + − > − 。接下來我們將透過Lyapunov定理來證明定理 2.2。首先我們令可能的Lyapunov函 數(Lyapunov function candidate)為[21]
T = V s Ps (2.32) 其中sT = ⎣⎡ x0.5sgn( )x y⎤⎦ , 為正定矩陣,P 2 2 1 1 1 2 0.5 0.5 0.5 1 k k k P k ⎡ + − ⎤ = ⎢ − ⎥ ⎣ ⎦, 則s對時間 t 的導函數為 0.5 1 0.5 2 1 (- sgn( ) ) 2 - sgn( ) k x x y x k x d ⎡ ⋅ + ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ + ⎥ ⎣ ⎦ s& & , 令 1 , 2 0.5 0.5 = 0 k A k − ⎡ ⎤ ⎢ − ⎥ ⎣ ⎦ = 0 1
[
]
T B ,C= 1 0[
]
,d&%= s d1 & , 將A、B、 、 帶入C d&% s&中可以得到 ( + 1 1 ) A Bd s = s s &% & (2.33) 將(2.33)式帶入V沿著系統軌跡對時間t的導函數可得到 1 2 2 2 1 1 2 1 1 0 1 0 1 ( ) T T T T T T T T T T s A P PA PB s V s d B P d s A P PA PB s s d s d B P d s A P PA C C PBB P s s σ σ ⎡ ⎤ ⎡ + ⎤⎡ ⎤ = ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎣ ⎦⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎧⎡ ⎤ ⎡ + ⎤⎡ ⎤ ⎫ ⎪ ⎪ ≤ ⎨⎢ ⎥ ⎢ ⎥⎢ ⎥+ ⎬ ⎢ ⎥ ⎣ ⎦⎢ ⎥ ⎪⎣ ⎦ ⎣ ⎦ ⎪ ⎩ ⎭ ≤ + + + & & & % % &% & & % % − (2.34) 我們令(2.34)式中 T 2 T T A P+PA+σ C C+PBB P= − ,其中 Q 3 2 2 2 1 2 1 1 1 1 2 1 1 1 0.5 0.25 0.5 0.5 0.5 0.5 0.5 1 k k k k k k Q k k k σ ⎡ + − − − − ⎤ = ⎢ − − − − ⎥ ⎣ ⎦ (2.35) 在假設 2.2 成立的情況下,會得到 為一正定函數。接下來,我們可進一步 將 0 Q> (2.34)式整理成如下 1 1 T V Q s ≤ − s s & (2.36)推導至此,由(2.36)式以及Lyapunov理論可知 T 為一個Lyapunov函數, V = s sP 即在控制律(2.28)參數滿足假設 2.2 下,可以確保對於任意正定對稱矩陣Q,找到 其相對應的正定對稱矩陣P滿足Riccati方程。因此,由以上證明可得到系統(2.27) 在控制律(2.28)的控制下為漸進穩定,也就是說系統(2.27),x與x&在有限時間內 收斂至零。
2.3 飛彈與目標相對運動模型
在攔截過程中,飛彈─目標相對運動包含 i) 相互接近時彼此速度的變化以及 ii) 視線角速度的改變。在此我們將飛彈與目標視為質點,建立飛彈目標相對運 動模型,從而設計觀測器實現目標跟蹤。首先我們引入視線座標系(Frame of Sight),參照附註 2.1,並且在附註 2.2 給出視線(Line of Sight)的定義。附註 2.1: 視線座標系以飛彈質心為原點O, 軸為飛彈─目標間的視線,並且指向目標為 正方向, x y軸位於包含 軸的鉛垂面內,並且與 軸垂直,指向上方為正, 軸則由安培右手定則決定。 x O Ox z 附註 2.2: 假設 qε與qβ 分別為視線高低角與方位角。qε定義為視線( 軸)與平面 的 夾角,若視線在此平面之上則 x O OX Z0 0 qε為正,反之為負。qβ 定義為視線在平面 上 的投影與 軸的夾角,若 軸順時針轉到此投影上則 0 0 X Z O 0 X O OX0 qβ 為正,反之為負。
− − r 文獻[22]指出在視線座標系下彈目相對運動在視線的高低方向和方位方向 之間存在耦合,本論文為了探討更精確、穩定的目標加速度估測以利後續設計導 引律使用,我們採用二維導引模型,假定水平和縱向平面可以實現解耦,也就是 將三維空間的運動視為在高低和方位兩個平面運動的合成,其估測結果可應用到 三維空間中。在此我們考慮縱向平面內的彈目相對運動,亦即只考慮視線高低角 的部分。為便於推導,我們將 以 表示,此時彈目相對運動如 qε qε q 圖2.6所示。 圖2.6 縱向平面飛彈目標相對運動關係 圖 2.6中 代表彈目相對距離, 代表視線角, 與 分別代表飛彈和目標的速 度方向角, 與 分別代表飛彈和目標速度。接下來將飛彈與目標的速度向量 分別沿視線方向與垂直視線方向進行分解,推導得到彈目相對運動方程如下 r q
φ
mφ
t m V Vt cos( ) cos( ) t t m m r&=V φ − −q V φ q (2.37) sin( ) sin( ) t t m m rq&=V φ − −q V φ q (2.38) r&為彈目相對速率, 為視線角速率。為了簡便起見,我們令 , , 並將q& Vr = &
V
q= &
rq
cos( ) sin( ) sin( ) sin( ) cos( ) sin( ) r m m m m m m m t t t t t t t V V q V q V q V V q V q q φ φ φ φ φ φ φ φ = − − − − + − − + − + −
& & & & & & & q q − rq q − (2.39) [ cos( ) cos( )] cos( ) sin( ) cos( ) sin( ) q t t m m m m m m m t t t t t V q V q V q V V q V q V q V q φ φ φ φ φ φ φ φ = − − − − − − − − − + − + −
& & & & & & & & (2.40) 顯然,由圖2.6可知, 與 分 別 為 飛 彈 加 速 度 與 目 標 加 速 度 在 視 線 方 向 上 的 分 量 。 與 則為飛彈加速度與目標加 速度在視線法向上的分量,於是我們令 cos( ) sin( ) m m m m m V& φ −q +V φ& φ − in( m ) V φ q
− − −Vt tφ&cos(φt− −q) V&tsin( t
q V&tcos(φt−q)−Vtφ&tsin(φt − )]
) q − cos( ) s m m m m Vφ φ q − & − & φ cos( ) sin( ) r m m m m m u =V& φ −q +V φ& φ q (2.41) cos( ) sin( )] r t t t t t w =V& φ −q −Vφ& φ −q (2.42) cos( ) sin( ) q m m m m m u = −V φ& φ −q −V& φ −q (2.43) cos( ) sin( ) q t t t t t w = −Vφ& φ −q −V& φ −q (2.44) 其中 和 分別是飛彈加速度與目標加速度在視線上的分量; 和 分別是飛 彈加速度與目標加速度在視線法向上的分量。將 r u wr uq wq (2.41)-(2.44)式帶回(2.39)與(2.40) 式,整理得 2 r r r= rq +w −u && & (2.45) 2r wq uq q q r r = − & − + && & r (2.46) (2.45)與(2.46)式即為縱向平面上的飛彈目標相對運動模型[23]。
第 3 章
機動目標加速度估測之應用
機動目標追蹤問題有廣泛的應用,因此觀測器之設計佔有極重要之地位,卡 爾曼濾波器的應用更為其中之代表[25]。然而卡爾曼濾波只能用在線性的狀態空 間模型且雜訊必須滿足高斯分佈(Gaussian distribution),因此當實際系統為非線 性系統或是雜訊特性偏離高斯分布時,卡爾曼濾波難以反映實際的目標機動。擴 展型卡爾曼濾波器(Extended Kalman Filter,EKF)中狀態模型及觀測模型雖然不 需要是線性函數,即可將卡爾曼濾波算法應用於非線性系統中,但實質上是將非 線性函數在當下估計值處線性化,若被忽略的高次項帶來較大的誤差時,可能會 導致濾波器的發散。有鑑於此,我們探討不需要精確的機動目標模型、系統雜訊 之統計特性的方式來建構觀測器。 在本章裡我們將利用第二章所建立之縱向面彈目相對運動模型設計擴張狀 態觀測器與基於Super-Twisting 演算法之二階滑模觀測器來估測終端導引階段目 標加速度。此兩種觀測器皆不依賴目標模型,也毋須限制目標是時變(time variant) 或非時變(time-invariant)的,且設計過程只需導引系統量測輸出與我方飛彈控制 輸入的資訊即可。在3.2 節我們設計擴張狀態觀測器估測目標加速度並以觀測誤 差作為性能指標(performance index),透過 2.1 節中 面積作為評價標準並且給出 選取ESO 參數的一種途徑,從而提高估測精度,在 3.3 節我們基於 Super-Twisting 演算法,以收斂時間之估計值為出發點,在控制參數之取值範圍內利用最佳化的 方式求得最佳化參數使得觀測器與系統之間的誤差能夠盡快收斂又不失其估測 精度,最後3.4 節,我們以 simulink 軟體來建構飛彈目標相對運動模型,並設計 兩種目標機動情形,討論分析兩種觀測器之模擬結果。 0 G3.1 應用擴張狀態觀測器於目標加速度估測
我們採用比例導引律的前提下,設計擴張狀態觀測器估測機動目標的加速度。 由2.3 節推導可知,縱向面導引方程如下 2r wq uq q q r r = − & − + && & r (3.1) (3.1)式中 代表飛彈與目標之間的相對距離、 代表即彈目相對速率、q代表視 線角、 代表視線角速率。 和 分別代表飛彈加速度和目標加速度在視線法 向上的分量。在本章我們假設 、r、q及 可以精準量測得到。由2.1 節所談論 的擴張狀態觀測器設計方式可知,需要將模型不確定性(model uncertainties)擴張 成新的狀態。在這裡,我們先作變數變換,令 r r& 1 q& uq wq & r q& x = &q,則(3.1)式可化為 1 1 2r wq uq x x r r = − & − + & r (3.2) 接下來我們將不確定性 wq r − 擴張成新的狀態x2,亦即令 2 q w x r = − ,則系統(3.2)可 以進一步描述為 1 1 2 2 2r uq x x x r r x μ ⎧ = − + + ⎪ ⎨ ⎪ = − ⎩ & & & (3.3) 其中−μ為 wq r − 對時間 t 的導函數,為了繼續完成觀測器之設計,我們引進下列 假設。 假設 3.1:模型不確定性(model uncertainties)x 對時間的變化率為有界的2 (bounded) ,亦即
2 , 0 x& = − ≤μ σ ∀ ≥t 。 接下來針對系統(3.3)構造擴張狀態觀測器 1 2 1 1 1 2 2 1 2 ( , , ) q u r z z e x r r z fal e β β α δ ⎧ = − − + ⎪ ⎨ ⎪ = − ⎩ & & & (3.4)
1 2 1 μ ε 接下來我們定義e1=z1-x 、e2 =z2-x 為系統誤差,並假定0< <α 。根據(3.3) 與(3.4)式,可以得到誤差動態為 1 2 1 1 2 2 ( , , )1 e e e e fal e a β β δ = − ⎧ ⎨ = − ⋅ + ⎩ & & (3.5) 根據2.1節的證明得知誤差系統必在有限時間內收斂至區域G0(參照圖2.2),也就 是說,誤差系統(3.5)的收斂程度最終由區域 所限定。根據圖2.3可知 面積為 ,其中 , 大於零且充分小,因此 的大小由 及 所決定。由 (2.25)式我們知道 0 G G0 2 0 2 rβ β β ε= 1- G0 β1 r0 1/ /(1 ) 2 1 2 1 ) β /(1 ) 2 max , (1 ( α α α α β β = − + 0 r 1 β β2 2 1 β 4 4 σ σ ) α − α − ⎧ ⎫ ⎪ ⎪ ⎨ ⎬ ⎪ ⎪ ⎩ ⎭ ,在此我們進一 步分析 與r0 、 的關係來提高ESO的估測精度。令 1/ 1 2 /(1 ) 2 1/(1 ) 2 2 2 1 1 ( ) ( ) 4 4 ( ) (1 )( ) h h α α α α σ α β β σ α α α β β − − = = − + (3.6) 這裡我們假定β2 >σ ,而當β1與β2固定時,可以得到h1( )α 是由(0 ,0)+ 遞增到 2 (1,σ ) β 的函數,而h2(α)是由 2 4β 2 2 1 1 4 ) σ β +β (0 ,+ 遞減到 2 1 4 (1, σ β ) 的函數,如圖3.1所示。 圖3.1 ro最佳選擇示意圖
當α =1時, 0 2 2 1 4 max , r σ σ β β ⎧ ⎫ = ⎨ ⎩ ⎭⎬,然而只要滿足 2 2 1 4 σ σ β > β (3.7) 1( ) h α 與h2( )α 必在0< <α 1的某一點α0相交,此時 1/ 0 0 1 0 2 0 2 ( ) ( ) ( ) r h α h α σ α β = = = , 參照圖3.1。因此,當假設(3.7)成立時,只要β2 > 即可使擴張狀態觀測器(3.4)的σ 估測精度優於α =1時的情況。經由以上分析,若欲進一步降低 來提升ESO的 估測精度,則必須降低 0 r 2 σ β 與α0,其中,要降低α0,根據圖 3.1中h2( )α 的性質 知,必須降低 2 2 1 4β β 與 2 1 4σ β 。基於以上的分析,可得選取ESO參數的一種憑藉,即 擴大不等式 2 1 2 4 β >β >σ (3.8) 這裡我們定義G0的面積為誤差收斂的性能指標(performance index),透過(3.8)式 作為選取ESO參數的原則,合理地選取ESO參數,使得 面積盡量小,也就是誤 差系統收斂的區域範圍盡量小(參照 0 G 圖2.2),從而提升ESO的估測精度。此外基於 以上分析我們可以進一步得到二階擴張狀態觀測器的收斂誤差為 0 0 1/ 1 0 2 1/ 2 1 0 1 2 ( ) ( ) e r e r α α σ β σ β β β ⎧ ≤ = ⎪⎪ ⎨ ⎪ ≤ = ⎪⎩ (3.9) 這樣即可繼續完成觀測器之設計,得到z 是1 x 的估測值,1 z 是2 x 的估測值。根2 據(3.3)式,我們知道擴張狀態 2 wq x r = − ,因此,我們可以得到目標加速度 的估 測值為 q w 2 q w ≈ −rz (3.10)
3.2 應用 Super-Twisting 演算法於目標加速度估測
本節我們將利用 2.1 節所談論的基於Super-Twisting演算法應用於導引系統 中機動目標加速度的估測。在這裡,我們先作變數變換,將模型不確定性(model uncertainties)wq r 令為 ,即d q w d r = ,並且令x1= &q,則導引方程(3.1)式可描述為 1 1 2r uq x x d r r = − & − + & (3.11) 接下來我們進一步設計觀測器如下 1 1 2r uq z x u r r = − & + + & (3.12) 其中u為Super-Twisting演算法中的控制律。接下來我們定義e1=z1-x1為系統誤差, 則根據(3.11)與(3.12)式,可以得到誤差動態為 1 e& = +u d (3.13) 根據2.2 節,控制律為u= +u1 u2,其中u1 = −k e1 10.5sgn( )e1 ,u&2 = −k2sgn( )e1 ,並 且 、k1 k2為控制律之參數。為了繼續完成觀測器之設計,我們引進下列假設。 假設 3.2: 未知函數d對時間 t 的導函數為有界的(bounded),即 d& ≤σ,∀ ≥t 0。 對於誤差系統(3.13) ,在假設 3.2 的條件成立下,依據定理 2.1,當 、 取值 滿足 且 1 k k2 1 2 k > 3 2 1 1 2 1 1 (4 8) (4 8) k k k k k σ + − > − ,則系統(3.13)式 於有限時間內收斂至原 點。基於以上分析以及根據 1 1 ( , )e e& 1 e (3.13)式知道,有限時間內& ≈0,然而 , 也就是說 ,亦即 是模型不確定性(model uncertainties) 的估測值,由於 1 &e = + du u d − ≈ −u d q w r d = u , 因此我們可以透過控制律 的設計從而得到目標加速度u wq的估測值為 q w ≈ −r (3.14)在這裡我們欲進一步討論收斂時間的問題,根據2.2 節的證明得知 為一 個可用Lyapunov 函數,其中 T V = s sP
[
]
0.5 T 1 2 1 1 2 0sgn( ) t sgn( ) s s ⎡e e d k τ dτ⎤ = = ⎢ − ⎥ ⎣ ⎦ s∫
, 2 2 1 2 = +s ss 22。由於P為正定矩陣,故λmin( )P s 22 ≤ ≤V λmax( )P s ,其中22 λmin(P)與
max( )P λ 分別為 矩陣之最小與最大特徵值,因此可得 P 1/ 2 0.5 1 1 2 1/ 2 min( ) V s e P λ ≤ ≤ = s (3.15) 另一方面,V 沿著系統軌跡對時間t之導函數由(2.36)式得知 1 1 T V Q s ≤ − s s & (3.16) 其中 Q 為正定矩陣,因此 2 2 min( ) 2 max( ) 2 T Q Q Q λ s ≤s s≤λ s (3.17) 根據(3.15)-(3.17)式可以進一步得 2 2 min 2 min 2 1 1 min 2 1 ( ) ( ) ( ) V Q Q s s Q λ λ λ ≤ − = − ≤ − s s s s & (3.18) 接下來利用λmin( )P s 22 ≤ ≤V λmax( )P s 這個性質,可以整理22 (3.18)式為 1/2 min 1/2 max ( ) ( ) Q V V P λ λ ≤ − & (3.19) 為便於討論,我們令 min 1/2 max ( ) ( , ) ( ) Q P Q P λ γ λ = (3.20) 也就是說 1/2 ( , ) V&≤ −γ P Q V (3.21) 亦即V 沿著系統軌跡對時間的變化率小於等於−γ( , )P Q V1/2,隨後整理(3.21)式得
t t )
( )
1/2 2 0 / ( , ) t= V γ P Q( )
1/2 min 2 0 / ( , ) optimal t = V γ P Q ( ) ( ) 1/2 0 0 ( , ) V t t V V dV γ P Q d − ≤ −∫
∫
(3.22) 故( )
( )
1/2 1/2 0 2≤ V t ≤2V 0 −γ( , )P Q (3.23) 也就是說 當 ,為有限值,亦即 必在有 限時間 收斂至零,如( ) ( )
1/2 0≤V t ≤ 0( )
1/2 2 0 / ( t= V γ P( )
1/2 2 0 / ( , t= V γ P Q ) Q( )
1/2 V t , 圖3.2所示。 圖3.2 V1/2(t)沿著系統軌跡對時間的響應 若希望收斂時間 的估計是最佳的,即 (3.24) 我們可以將(3.24)式最佳化的問題視為 max ( , ) optimal P Q γ = γ (3.25) 又 min 1/2 max ( ) ( , ) ( ) Q P Q P λ γ λ = ,故我們可將(3.25)式最佳化的問題等價為 1/2 max min ( ) min ( ) optimal P Q λ γ λ = (3.26) 在這裡,矩陣 及 為P Q 2.2 節所取的正定矩陣(參照(2.32)式與(2.35)式)。綜合以 上分析,我們將在參數 、 的取值範圍內,以誤差系統收斂時間的最佳化作為 選取觀測器參數的一種憑藉使得觀測器追蹤到目標的時間估計是最佳的。 1 k k23.3 機動目標加速度之模擬
3.3.1 系統模擬設計與建立 simulink
在這一小節中,我們利用simulink 軟體來建構 3.1 節所提及的視線座標系下 彈目相對運動模型,並且加入3.2 節與 3.3 節所設計的兩種觀測器來對目標加速 度進行估測。首先考慮2.3 節建立之縱向面飛彈目標相對運動模型 2 2 q q r rq w u r q q r r = = − − + && & & && & r (3.27) 我們可將(3.27)整理為 = + (x)G x& f(x) u (3.28) 其 中 x=⎣⎡x1 x2 x3 x4⎦⎤T=[
r r& q q&]
T , T 2 2 1 4 2 4 1 4 2 x x x x x x x − ⎡ ⎤ = ⎢ ⎥ ⎣ ⎦ f(x) , , T q q u w ⎡ ⎤ ⎣ ⎦ T 1 1 0 0 0 1/ (x) = 0 0 0 1/ u = G x x ⎡ ⎤ ⎢ ⎣ ⎦ −( )
[
⎥ 。在接下來的模擬,我們假設飛彈 初始位置為[0 0]T(m),初始速率為 1200(m/s),速率高低角為 5(度);目標位置為 [10000 -1500]T(m),初始速率為-2400(m/s),速率高低角為-5(度)。可以直接計算 得 0 = 10112 −3531.1 0.1489 −0.0419]
T x 。其模擬方塊流程圖如下圖所示 圖3.3 未考慮輸出雜訊的導引系統方塊圖3.3.2 模擬結果
此節我們利用simulink進行目標加速度估測,並分析估測精度及收斂時間等 性能。另一方面對於飛彈系統而言,Paul指出常見的飛行技巧有筒滾式(barrel roll) 與垂直剪式(vertical scissors)[26],Chadwick指出目標機動頻率約在 0.5~1(Hz)[27]。 為了展示本論文所設計的觀測方式,我們設計下面兩種情況進行模擬。 一、以機動頻率為 0.5(Hz),最大機動能力為 14g± (m/s2)的正弦波訊號作為筒滾 式(barrel roll)目標訊號。 二、以機動頻率為0.5(Hz),最大機動能力為 5g± (m/s2)的方波訊號作為垂直剪式 (vertical scissors)目標訊號。 附註 3.1: 由於導引系統除了 處其它地方皆連續,而這奇異點即為飛彈目標碰撞處, 但就技術而言,通常飛彈的攔截點不是發生在 0 r = 0 r = 處,而是發生在 區間內,這個攔截距離定義為zero intercept 0 min max [ , r ∈ r r 0.05,100] ] [28],本論文假設 0 [ (m)。 r ∈ 由於觀測器參數的選取直接影響目標加速度的估測效果,因此我們利用3.2 與 3.3 節給出選取參數的一種憑藉來決定觀測器之參數,在此我們分別討論。 (i) 擴張狀態觀測器的參數選取 根據3.2 節的分析,在假設 3.1 成立的情況下擴大不等式 2 1 2 4 β >β > 來提高估測σ 精度,我們利用此憑藉針對兩種模擬情況選取觀測器參數如下筒滾式機動(barrel roll) 垂直剪式機動(vertical scissors)
1 0.001 0.3 85 125 2 δ α β β = = = = 1 0.001 0.4 85 125 2 δ α β β = = = =
(ii) 基於 Super-Twisting 演算法之二階滑模觀測器的參數選取
根據3.3 節的分析,在假設 3.2 成立的情況下我們透過求解 Riccati 方程得到參數 的取值範圍來確保系統收斂。另一方面,為了得到收斂時間的最佳估計我們進一 步使用MATLAB 工具箱(MATLAB toolbox)得到
4 2 2 0.5 2 2 1 1 2 2 2 x 1 ma (P) k (k / 4 2k k 4k 4k 1) / 2 k /4 1/ 2 λ = + + + − + + + (3.29) 4 2 3 2 2 2 2 2 6 1 1 2 1 5 4 m 4 3 3 2 2 1 1 2 1 1 2 1 1 2 2 0.5 1 2 1 1 2 1 1 1 2 2 3 2 1 n 1 i ( 1 / 2 2 2 / 4 / 4 9 /16 / 2 3 / 4 2 1 3 / 4 2 ) / 2 / 4 / 2 1/ 2 / 8 / 4 2 ) / ( k k k k k k k k k k k k k k k k k k k k k k k Q k k k σ σ λ σ σ σ σ − − + − + − + − + + − − + + − + + − + + − − + − = σ 1 (3.30) 整理(3.29)與(3.30)式得到 1/2 max min ( ) ( ) P Q λ λ ,同時控制參數依據定理2.1 必須滿足 k1 >2且 3 2 1 1 2 1 1 (4 8) (4 8) k k k k k σ + − > − ,接著利用MATLAB得到 與 的最佳值如下 k1 k2
筒滾式機動(barrel roll) 垂直剪式機動(vertical scissors)
最佳化前 1 2 2.5 6 k k = = 1 2 2.5 4.5 k k = = 最佳化後 1 2 5.0856 14.1021 k k = = 1 2 4.9835 13.2529 k k = = 模擬結果顯示在圖 3.4到圖 3.15,在此我們以符號ESO表示經由擴張狀態觀 測器估測目標加速度之結果;以符號STO表示經由Super-Twisting演算法估測目標 加速度之結果;最後以符號OPTIMAL來表示基於Super-Twisting演算法並且進一 步利用收斂時間估計選取最佳化參數的結果。 圖3.4到圖 3.9為情況一的模擬結果。圖 3.4(a)與(b)分別代表ESO和導引系統 之間的狀態誤差 e 及1 e2(參照(3.5)式),而(c)與(d)分別代表STO和導引系統之間的 狀態誤差 e 及1 e&1(參照(3.13)式),而(e)與(f)分別代表OPTIMAL和導引系統之間
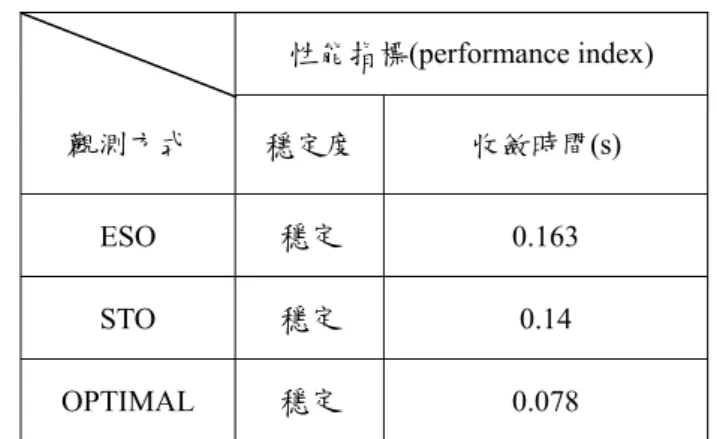
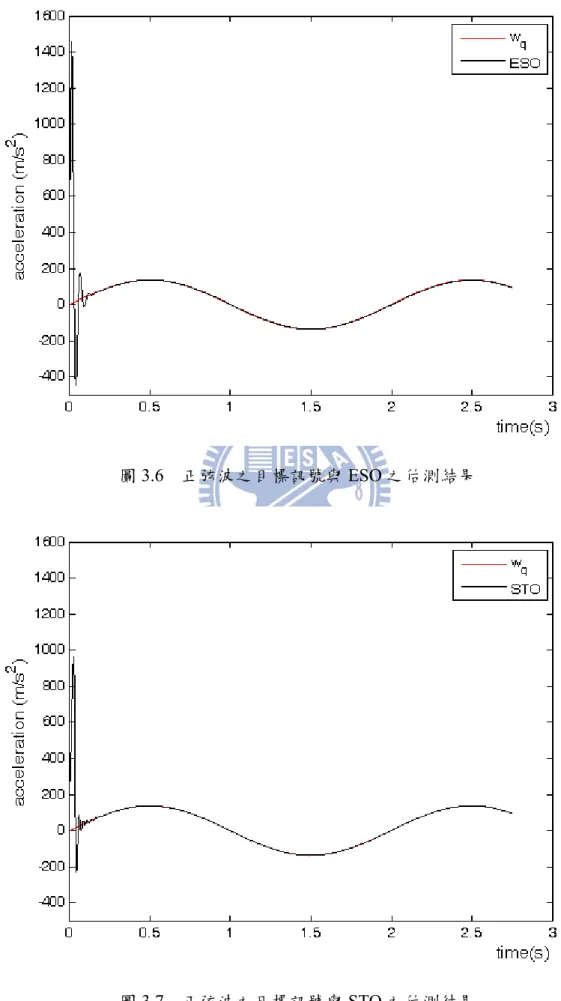
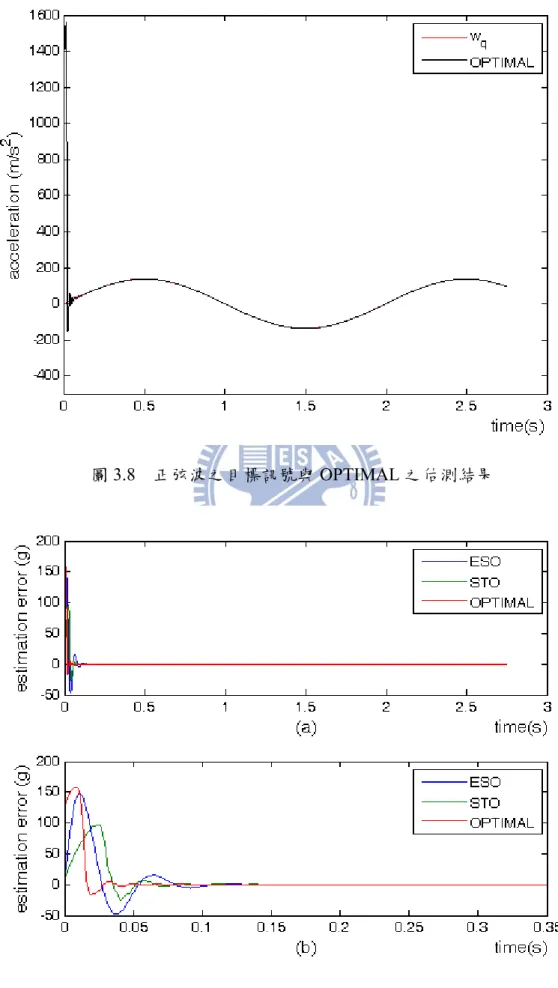
的狀態誤差 及 ,由此圖可以看出所設計的觀測器幾乎使其狀態誤差收斂至原 點,我們將觀測器狀態 1 e e&1 1 z 與 間誤差的收斂狀況整理在下表。q& 表3.1 目標為正弦波時三種觀測器的狀態z 與 間誤差收斂狀況比較表1 q& 觀測方式 性能指標(performance index) 穩定度 收斂時間(s) ESO 穩定 0.078 STO 穩定 0.043 OPTIMAL 穩定 0.02 為了比較觀測器的收斂速度,我們定義穩定為觀測器狀態z 與 間誤差的絕對值1 收斂到0.00007 內,而收斂時間定義為狀態誤差之絕對值收斂到 0.00007 內後確 保不再大於0.00007 所對應的時間,由此可知三種方式皆可使狀態誤差盡可能的 在零附近。同時也驗證了基於收斂時間估計進行最佳化分析的估測方式有最快的 收斂時間0.02 秒。另一方面,由 q& 圖3.5可以看出基於Super-Twisting演算法無論有 否進行最佳化給出參數 與 ,其控制律不存在切跳現象,這也說明參數 與 的取值範圍是正確的。由以上模擬結果,我們知道誤差系統(參照 1 k k2 k1 k2 (3.5)與(3.13)) 於有限時間收斂至原點,其結果與3.2 與 3.3 節理論分析一致,亦即代表觀測器 之有效性,從而得到目標加速度的估測值,如圖3.6到圖 3.8所示。另一方面,我 們知道加速度估測值與彈目相對距離r成正比,然而當狀態誤差進入穩態前也就 是終端導引階段初期,飛彈目標相對距離甚遠,因此估測結果有極大的振幅,圖 3.6到圖 3.8飛行初期估測結果有極大的振幅就是上述原因所造成的。而當狀態誤 差進入穩態後,所對應的估測結果與目標訊號幾乎重合。接著我們進一步檢視估 測結果與目標訊號之間的誤差,如圖 3.9(a)及(b)所示,其中(b)是擷取(a)圖 0 到 0.35 秒方便視其估測誤差收斂情形,我們將其收斂狀況整理在下表。
表3.2 目標為正弦波時三種觀測器的估測誤差收斂狀況比較表 觀測方式 性能指標(performance index) 穩定度 收斂時間(s) ESO 穩定 0.163 STO 穩定 0.14 OPTIMAL 穩定 0.078 表3.2中穩定是指估測誤差的絕對值是否收斂到 0.5g(m/s2)內,收斂時間則定義為 估測誤差的絕對值確保收斂到 0.5g(m/s2)時所對應的時間。由表 3.2同時對照圖 3.9可看出觀測器追蹤速度很快並且擁有不錯的估測精度,再次驗證觀測器之有 效性。另一方面,由表3.2與圖 3.9一樣可以發現在三種觀測方式中,我們利用收 斂時間估計來選取最佳化參數的方式有最快的估測誤差收斂時間0.078 秒。 圖3.10到圖 3.15為情況二的模擬結果。圖 3.10 (a)與(b)分別代表ESO和導引 系統之間的狀態誤差 及 2,而(c)與(d)分別代表STO和導引系統之間的狀態誤差 及 ,而(e)與(f)分別代表OPTIMAL和導引系統之間的狀態誤差 及 , 我們 將觀測器狀態 1 e e 1 e e&1 e1 e&1 1 z 與 間誤差的收斂狀況整理在下表。q& 表3.3 目標為方波時三種觀測器的狀態z 與 間誤差收斂狀況比較表1 q& 性能指標(performance index) 飛行初期 目標第一次機動 目標第二次機動 觀測方式 穩定度 收斂時間(s) 穩定度 收斂時間(s) 穩定度 收斂時間(s) ESO 穩定 0.123 穩定 0.066 穩定 0.072 STO 穩定 0.077 穩定 0.028 穩定 0.043 OPTIMAL 穩定 0.033 穩定 0.015 穩定 0.017 圖3.10可以看出於 1 秒及 2 秒處有些許的變化,這是因為目標於 1 秒及 2 秒時突
然的機動所引起的,我們於表 3.3檢視當目標發生機動後,觀測器狀態z 與 間1 誤差的收斂情形。我們定義穩定為狀態誤差的絕對值是否收斂到10-5內,而收斂 時間定義為狀態誤差之絕對值確保收斂到 10-5內所對應的時間,由 q& 表 3.3可看出 即使目標發生急遽變化,狀態誤差仍可盡快且盡可能地收斂到零附近,且再次驗 證基於收斂時間估計進而選取最佳化參數的方式有最快的收斂時間。此外由圖 3.11可以看出基於Super-Twisting演算法的控制律不存在切跳現象。另外,根據圖 3.10,觀測器之誤差系統(參照(3.5)與(3.13))於有限時間收斂至原點,其結果與 3.2 與3.3 節理論分析一致。而估測結果與彈目相對距離成正比,故估測誤差隨著距 離越遠而越大,導致圖3.12到圖 3.14飛行初期估測結果有極大的振幅。隨後當狀 態誤差進入穩態後,估測結果與目標訊號幾乎重合,但於1 秒及 2 秒時目標突然 的變化再次使得我們的估測結果一時無法追蹤到目標訊號,因此我們利用圖3.15 來檢視估測結果與目標訊號之間的估測誤差方便探討目標突然機動時觀測器的 追蹤情形,同時將觀測誤差收斂狀況整理在下表。這裡我們以符號ESO表示經由 擴張狀態觀測器估測目標加速度之結果;符號STO表示經由Super-Twisting演算法 估測目標加速度之結果;最後以符號OPTIMAL來表示基於Super-Twisting演算法 並且進一步利用收斂時間估計選取最佳化參數的結果。 表3.4 目標為方波時三種觀測器的估測誤差收斂狀況比較表 性能指標(performance index) 飛行初期 目標第一次機動 目標第二次機動 觀測方式 穩定度 收斂時間(s) 穩定度 收斂時間(s) 穩定度 收斂時間(s) ESO 穩定 0.139 穩定 0.081 穩定 0.059 STO 穩定 0.13 穩定 0.065 穩定 0.037 OPTIMAL 穩定 0.08 穩定 0.046 穩定 0.03 圖3.15中(b)-(d)分別為(a)的局部放大圖,方便視其估測誤差收斂情形,我們將之
對照表 3.4,其中我們所談的穩定是指估測誤差的絕對值是否收斂到 0.5g(m/s2) 內,另外收斂時間則定義為估測誤差的絕對值確保收斂到 0.5g(m/s2)時所對應的 時間,可以發現即使目標突然機動仍可看出觀測器很快地追蹤到目標並且擁有不 錯的估測精度,再次驗證觀測器之有效性。另一方面,由表3.4與圖 3.15一樣可 以發現在三種觀測方式中,我們利用收斂時間估計來選取最佳化參數的方式,其 估測誤差於飛行初期有最快的收斂時間 0.08 秒,即使在 1 秒以及 2 秒時目標有 (m/s2)與 (m/s2)的突然變化,其估測誤差仍以最快的時間 0.046 秒與 0.03 秒追蹤到目標訊號。 10g + −10g 另一方面,這裡我們選取ESO參數的基本原則是擴大不等式(3.8)來提高估測 精度,但在情況二目標突然的變化勢必影響ESO的估測結果,因此我們將α =0.3 增加至0.4,讓fal函數的斜率變小也就是降低誤差的變化速率,使得估測結果不 要有極大的變化給導引系統帶來衝擊。而STO的部分我們知道 1 1 1 0.5 2 1 sgn( ) 2 k e e k e e − − = & 1 +d& && (3.31) 然而在情況二目標突然地變化前,經由STO的設計 幾乎已經收斂至零,因此目 標發生機動的那一瞬間 1 e (3.31)式極負,但我們希望接下來相平面
(
e e1,&1)
軌跡下降 緩一點,這是因為wq的估測值與控制律u有關,而u又與 有關,因此我們將 下降至 4.5 用以降低控制律u的變化,使得估測結果不要有極大的變化給飛彈導 引系統帶來衝擊。最後,綜合以上討論得到在本節ESO與STO參數的選取下,以 誤差系統收斂時間估計選取最佳化參數的方式確實最快追蹤到目標訊號,也就是 說有最快的觀測誤差收斂時間。 1 e k2 =6圖3.4 目標為正弦波時三種觀測器的狀態誤差時間響應比較圖
圖3.6 正弦波之目標訊號與 ESO 之估測結果
圖3.8 正弦波之目標訊號與 OPTIMAL 之估測結果
圖3.10 目標為步階時三種觀測器的狀態誤差時間響應比較圖
圖3.12 方波之目標訊號與 ESO 之估測結果
圖3.14 方波之目標訊號與 OPTIMAL 之估測結果
第 4 章
考慮真實導引系統存在輸出量測雜訊之機動目
標加速度估測
對於實際的飛彈導引系統,由於硬體因素的限制,飛彈飛行過程中,尋標器 (missile seeker)迴路往往存在無可避免的輸出雜訊干擾,然而這些雜訊會對機動 目標的追蹤精度造成不良的影響,因而提高飛彈的誤失距離(miss distance)。現有 的觀測器雖然可以處理不確定性等問題,但大多數沒有考慮輸出雜訊干擾對系統 的影響,或者是較為一般的做法是於控制迴路中使用濾波器對系統輸出進行濾波 處理,以去除雜訊之干擾。但濾波後訊號的幅值(amplitude)與相位(phase)會與系 統的真實輸出產生較大的差異,若直接以此輸出來建構觀測器,勢必造成非預期 的估測誤差(estimation error)。除此之外,尋標器迴路中存在著追蹤迴路時間常數, 此模式將導致系統輸出的相位損失,亦即在尋標器雜訊模式下,對於目標估測將 產生很大的影響。有鑑於此,本論文透過微分器(differentiator)的應用,先對含有 雜訊之系統輸出進行濾波從而得到濾波後之訊號以及其微分訊號,並且進一步利 用濾波後之訊號及其微分訊號補償經由尋標器所造成系統輸出的相位損失,隨後 與觀測器結合從而得到機動目標加速度的估測值。 在本章中,我們將在4.1 節介紹飛彈導引系統中的尋標器模式與主要輸出雜 訊來源,接著,在4.2 節中,我們將探討尋標器作為微分器之含義與雜訊放大的 根本原因並進一步分析雜訊之特性,而在4.3 節我們設計補償機制來對導引系統 中尋標器之輸出進行雜訊濾波與相位補償,最後4.4 節,我們將補償機制結合擴 張狀態觀測器與滑模觀測器兩種估測方式,同樣以第三章中飛彈目標相對運動模 型為例子來進行模擬,並且比較補償前與補償後的估測結果以及分析討論兩種觀 測器的模擬結果。4.1 問題描述
尋標器主要的功能在於搜尋以及追蹤目標,其基本組成包含感測器與接收器。 感測器用以追蹤感應目標之訊號,而接收器接收感測器所提供之訊號並加以處理, 從而得到飛彈與目標之間的相對運動特性。然而,尋標器存在某些雜訊干擾以及 整個追蹤迴路時間常數約莫 0.1 秒[29],此模式的限制將影響飛彈導引的追蹤精 度。因此,在本章中我們主要的目的為,考慮實際導引系統中尋標器模式的限制 並分析其特性,將這些干擾及其所造成之時間延遲有效地抑制及補償,進而結合 觀測器估測目標加速度以供設計導引律時使用。在此我們先介紹本論文考慮之尋 標器其雜訊來源,主要包括兩種形態[29]: (i) uRNA:其強度與飛彈和目標間距離平方呈正比。 (ii) uFN:其強度不隨彈目相對距離而改變。 詳細尋標器模式參照圖4.1,本論文將透過理論分析設計觀測器估測目標加速度, 再利用Simulink程式來模擬終端導引階段目標加速度估測之結果。 圖4.1 尋標器模式示意圖 圖 4.1說明尋標器雜訊模式,其中追蹤迴路時間常數T為 0.1 秒,rA為尋標器參 數10000公尺,uRNA為屬於高斯雜訊(Gaussian Noise)其均值(mean)為零,標準差(standard deviation)為10-3,而uFN 同樣屬於高斯雜訊其均值為零,標準差為2*10-5。 由於此模式的限制將導致 存在量測雜訊,另一方面,量測飛彈目標相對距離 、q& r
觀測導引迴路如下圖所示。 圖4.2 考慮輸出雜訊的導引系統方塊圖 圖 4.2說明經由量測得到 、 、及r r& q後再透過尋標器模式得到受雜訊汙染的 ,q& 接著我們將於 4.3 節設計補償機制補償尋標器輸出雜訊對系統的影響,並於 4.4 節與觀測器結合從而得到目標加速度。而導引過程相對距離與雜訊之關係如下 圖4.3 彈目相對距離與量測雜訊之關係