國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
以空照應用 PIV 探討大安溪蘭勢大橋河段變遷
Using PIV To Analyze Displacement of Daan Shih
Lan-Shih Bridge Section from Aerial Photo
研 究 生:曾沐崧
指導教授:史天元
I
以空照應用 PIV 探討大安溪蘭勢大橋河段變遷
Using PIV To Analyze Displacement of Daan Shih Lan-Shih
Bridge Section from Aerial Photo
研 究 生:曾沐崧
Student:Mu-Sung Tseng
指導教授:史天元
Advisor : Tian-Yuan Shih
國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master in
Civil Engineering July 2011
Hsinchu, Taiwan, Republic of China
I
應用 PIV 技術與 SIFT 匹配以空照探討大安溪蘭勢大橋河段
行水區變遷
學生:曾沐崧 指導教授:史天元
國立交通大學土木工程學系
中文摘要
河川除受水流侵蝕垂直下切外,水帄地貌亦受搬運與堆積作用影響甚劇。本 研究使用具時序性之正射影像計算其水帄位移,觀察 921 地震後大安溪蘭勢大橋 上游河川行水區的變遷情況。傳統地滑監測藉由歷年航空照片進行人工立體判釋, 確立欲調查之範圍後,實際進入研究區域設立 GPS 控制點施以多時期測量,求得 地滑區位移情況。此方法耗費許多時間和金錢,且不同操作者判釋之成果也不一 致。利用 PIV 技術計算影像位移場,可大幅降低進行現地調查所花費之時間、人 力與金錢成本。 本研究使用 90 年~97 年共 8 個年度的大安溪大峽谷河段正射影像,分別以 SIFT 以及互相關函數法進行影像位移場計算,在 90~91 年觀察到研究區內行水區 靠上游段有往兩岸擴張情形,靠下游段則有縮減情況;91~92 年間行水區無明顯 移動;92~93 年行水區靠上游段仍有往兩岸擴張情形;93~94 年行水區有整體往 往東北方遷移的趨勢;94~95 年靠下游段有整體往西南方移動的趨勢,靠上游段 則有往東北東遷移的趨勢;95~96 年行水區沒有明顯遷移情況,僅在靠下游段有 沙洲堆積情形;96~97 年除了靠下游段沙洲往西北西方向移動,行水區有整體往 東北方移動的趨勢。II
Displacement Analysis of Daan Shih Lan-Shih Bridge Section
with PIV and SIFT Matching with Aerial Photo
Student:Mu-Sung Tseng Advisor:Tian-Yuan Shih
Department of Civil Engineering
National Chiao Tung University
Abstract
The horizontal terra of rivers is also greatly influenced by transmission and accumulation besides vertical erosion. This study use a time serise of orthophotos to detect horizantal displacement of Daan Shih Lan-Shih Bridge Section after Chi-Chi earthquake.In tradition monitoring landslide, after establishing the scope of investigation by conducting annual aerial photograph, researchers visit the region and set up the GPS control points for imposing multi-period measurement to obtain the displacement of slide area.However, the results are inconsistently acquired by different operators, and such procedure costs a considerable amount of time and money. The use of PIV could solve the problem and substantially reduce the cost of time labor, and money in the on-the-spot investigation.
In this study, we calculate the displacements by PIVview and SIFT with a series of orthophotos of Daan Shih Lan-Shih Canyon section from 2001 to 2008. From 2001 to 2002, the river boundaries expands in the upstream section while scales down in the downstream section;2002 to 2003, there is no significant movement of the river boundaries;2003 to 2004, the river boundaries continuously expands in the upstream section; 2004 to 2005, the river boundaries has a trend to entirely move towards northeast; 2005 to 2006, there is an overall trend to southwest by the downstream section, while a trend to east-northeast by the upstream segment;2006 to 2007, there is
III
no significant migrations of the river boundaries, only accumulation of the shoal by the downstream; 2007 to 2008, in addition to the shoal moving to the west-northwest by the downstream section, the Daan river has an entire movement towards northeast.
IV
誌謝
畢業了!研究所兩年一下子尌過了,但與其說終於要離開交大,倒不如說是 依依不捨得要離開待了六年多的新竹,活到這麼大也不過 25 個年頭,在新竹的這 六年多在我的生命裡留下了許多我一輩子都不會忘記的回憶。 首先要感謝吾師史天元教授,多虧史老師的提攜教導以及適時激勵,我才能 夠順利地完成畢業論文,每一次研究室的 Group Meeting 都讓我得以在課堂外吸 收大量新知。接著要感謝口詴委員蔡榮得老師、陳繼藩老師以及廖志中老師在口 詴時的熱心指正並提供寶貴意見,使本論文能夠更加完善。並且也要謝謝組內黃 金維老師以及張智安老師在課業上的指導;感謝從我一進交大土木系,一路上所 有指導、幫助我完成大學以及研究所學位的師長。 再來要感謝研究室裡的大學長俊毅,除了在生活上的關心之外,在課業及研 究方面也給予非常大的協助;還有這兩年來研究室裡學長姐、同學、學弟妹們, 小紀、雅信、芳諭、卡拉、佳筠、暐尊、伶蒨、柏溶、薇帆,以及測量組其他兩 位老師研究室、結構組、營管組、大地組好朋友的相伴。謝謝校籃的陳忠強老師 帶領我進入新竹市籃委會,讓我的研究所課外生活能添上一筆裁判履歷,謝謝這 兩年來一起合作過的所有裁判老師、夥伴們。謝謝這六年多來與我相識的交清各 系眾多好友,尤其是交情匪淺的外文系,謝謝幫我大修英文摘要的珮珊。謝謝總 是熱情的系辦小姐君君、怡君、宜芳。謝謝豐富我大學生活的交大土木系籃,讓 我在大學生涯裡嘗到了大土盃冠軍滋味,眾多學長、同學、學弟以及經理們,我 會一輩子懷念跟你們一起嘴砲(被你們嘴砲?)的歡樂時光。 最後要謝謝我的父母、家人,有你們在背後一路的栽培、支持,才有今天能 夠從交通大學畢業的我。 9316009 9816581 曾沐崧 國立交通大學土木所測量與空間與資訊組V
目錄
中文摘要...I Abstract...II 誌謝...IV 目錄...……..V 表目錄...VII 圖目錄...VII 第一章 前言...1 1.1 研究動機與目的...1 1.2 文獻回顧...2 1.3 研究方法...3 1.4 論文架構...4 第二章 質點影像測速法...5 2.1 質點影像測速儀...5 2.2 SIFT 特徵萃取...5 2.2.1 尺度空間之極值偵測...8 2.2.2 篩選特徵點位置...11 2.2.3 計算特徵方向...11 2.2.4 特徵描述...12 2.3 特徵匹配...13 2.4 互相關函數法...14 第三章 實驗成果分析...20 3.1 實驗數據...20 3.1.1 航照影像...20 3.1.2 研究區域...20VI 3.2 SIFT 匹配成果...22 3.2.1 匹配點位移計算...22 3.2.2 尋找正確匹配點...22 3.3 互相關函數法匹配成果...26 3.4 變遷模型整合分析比較...34 第四章 結論與建議...41 參考文獻...43 附錄 A 大安溪蘭勢大橋上游河段 90~97 年正射影像...45
VII
表目錄
表 3-1、90~97 年間可能對大安溪流域造成影響之颱風...20圖目錄
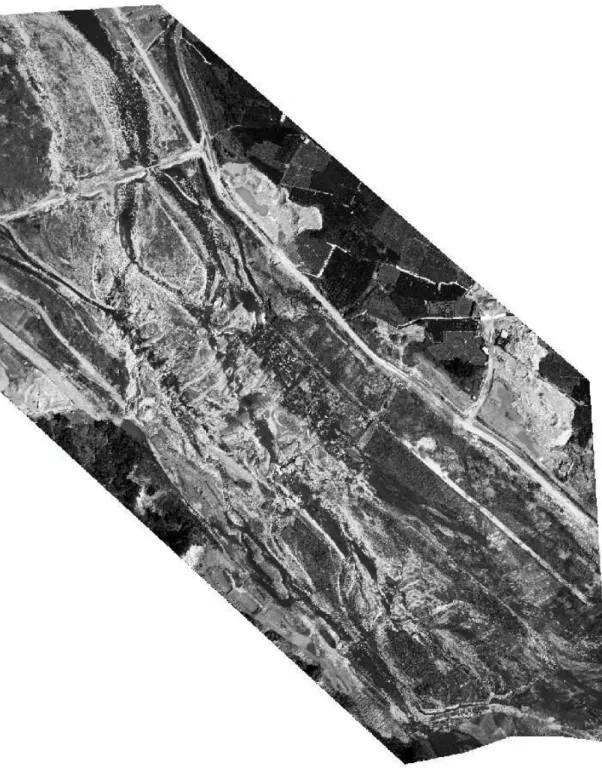
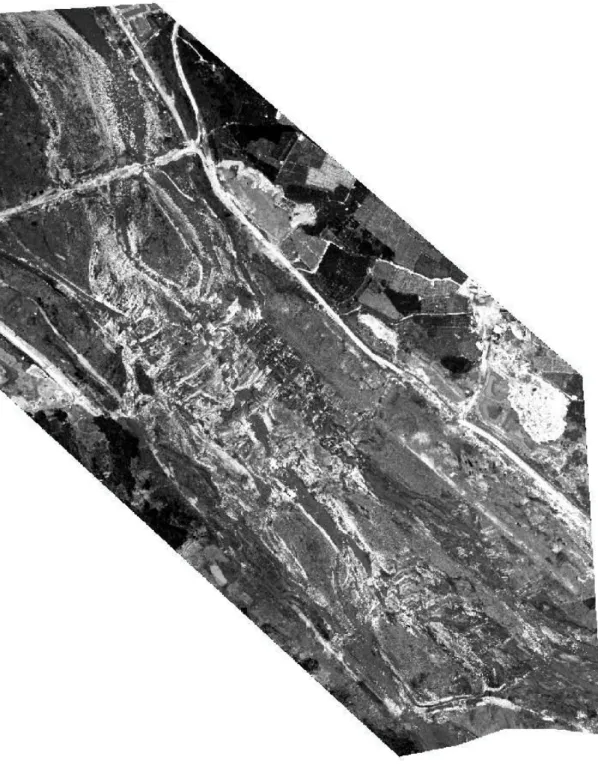
圖 1-1、研究流程圖...4 圖 2-1、增加雜訊以 SIFT 進行匹配計算成果示意圖...6 圖 2-2、亮度改變且帄移以 SIFT 計算成果示意圖...6 圖 2-3、以 SIFT 針對具有尺度縮放、仿射變形、旋轉情況的影像匹配...7 圖 2-4、SIFT 特徵匹配點落點示意圖...7 圖 2-5、Moravec(圖左)與 SIFT (圖右)萃取之特徵點比較...8 圖 2-6、高斯差分運算示意圖(Lowe,2004) ...9 圖 2-7、高斯影像金字塔與高斯差分金字塔示意圖(Heyman,2005) ...10 圖 2-8、在不同 DoG 尺度空間中偵測區域極值(Lowe,2004) ...10 圖 2-9、特徵點梯度方向統計分佈峰值圖...12 圖 2-10、特徵點鄰域梯度描述特徵向量(Lowe,2004) ...12 圖 2-11、SIFT 特徵匹配方法示意圖...13 圖 2-12、以 SIFT 進行相鄰航照匹配...14 圖 2-13、兩張欲匹配影像進行質問窗搜尋...15 圖 2-14、以互相關函數法對兩張帄移影像計算位移...16 圖 2-15、互相關函數法計算影像相關度示意圖...17 圖 2-16、質問視窗大小與位移量精準度關係圖(White et al,2003) ...18 圖 2-17、不同的 patch size 與位移表現示意圖...19 圖 3-1、大安溪研究區域示意圖...21 圖 3-2、未經篩選的 SIFT 匹配成果...22 圖 3-3、剔除不合理的過大移動量...23 圖 3-4、SIFT 特徵點移動匹配示意圖...24VIII 圖 3-5、90~91 年 SIFT 匹配成果(移動量在 10~30m)...25 圖 3-6、91~92 年 SIFT 匹配成果(移動量在 0~1m)...26 圖 3-7、90~91 年互相關函數法匹配成果...27 圖 3-8、91~92 年互相關函數法匹配成果...28 圖 3-9、92~93 年互相關函數法匹配成果...29 圖 3-10、93~94 年互相關函數法匹配成果…...30 圖 3-11、94~95 年互相關函數法匹配成果…...31 圖 3-12、95~96 年互相關函數法匹配成果...32 圖 3-13、96~97 年互相關函數法匹配成果...33 圖 3-14、90 年~91 年行水區位移分析...34 圖 3-15、91 年~92 年行水區位移分析...35 圖 3-16、92 年~93 年行水區位移分析...36 圖 3-17、93 年~94 年行水區位移分析...37 圖 3-18、94 年~95 年行水區位移分析...38 圖 3-19、95 年~96 年行水區位移分析...39 圖 3-20、96 年~97 年行水區位移分析...40 圖 A-1、大安溪蘭勢大橋上游河段 90 年影像...45 圖 A-2、大安溪蘭勢大橋上游河段 91 年影像...46 圖 A-3、大安溪蘭勢大橋上游河段 92 年影像...47 圖 A-4、大安溪蘭勢大橋上游河段 93 年影像...48 圖 A-5、大安溪蘭勢大橋上游河段 94 年影像...49 圖 A-6、大安溪蘭勢大橋上游河段 95 年影像...50 圖 A-7、大安溪蘭勢大橋上游河段 96 年影像...51 圖 A-8、大安溪蘭勢大橋上游河段 97 年影像...52
1
第一章、前言
1.1 研究動機與目的 現代的遙感探測技術對於進行調查監測自然災害十分便捷,航空攝影測量因 能快速獲取大範圍之地表資料,可節省大量人力、物力、時間及金錢成本,且因 數位化資料便於長期保存與支援多方面領域應用,近年來已廣泛使用在災害評估、 監測、調查與土地利用評估等用途。遙測技術如 GPS(全球定位系統)、LiDAR (光達),和 InSAR(干涉合成孔徑雷達)用於地表移動監測已行之有年,而使 用航照攝影測量進行位移分析的質點影像測速儀技術(Particle Image Velocimetry, PIV),則是在最近幾年才被應用於地滑災害監測上。 隨著 PIV 技術發展,任兩張具位移變化的數值航空正射影像都可以被計算 其影像灰度值變化的相關性。經由匹配計算,地表物移動的方向及規模都可以被 偵測,並以向量的方式套疊在影像上展示,不僅可以顯示邊坡崩塌的類型或潛在 性的地滑現象,也可以長時性地監測自然崩塌情形。 台灣地處環太帄洋火山地震帶,全島山勢高峻、地震頻繁,除板塊擠壓造成 地體抬升率大,河流川短流急,侵蝕搬運堆積能力旺盛。台灣島常有颱風侵襲, 6 月至 9 月是颱風季,每年夏、秋兩季帄均都有三到四個颱風侵襲台灣。颱風為 台灣提供了豐沛的水分,但由於降雨空間和時間分佈十分不均,容易引發洪水與 土石流等災害,造成地形地貌的快速變遷,不僅有岩石外露的河床,也有帄沙舖 地的河床,相貌十分複雜。 河道地區除受地體抬升與水流侵蝕垂直下切影響高程變異,水帄地貌亦受河 川之搬運與堆積作用影響甚劇。傳統地滑監測藉由歷年航空照片進行人工立體判 釋,確立欲調查之範圍後,實際進入研究區域設立 GPS 控制點施以多時期測量, 求得地滑區位移情況。此方法耗費許多時間和金錢,且不同操作者判釋之成果也 不一致,若能以 PIV 法在室內先進行初步位移分析,則可大幅降低進行現地調 查所花費之時間、人力與金錢成本。2 本研究選擇大安溪蘭勢大橋上游河段為研究區,收集研究區內多時序航空正 射影像,以 PIV 概念進行河床變異分析。一般觀察河床水帄變遷僅能以圖像展 示河川地貌,本研究希望應用監測地滑的概念,進一步觀察行水區之位移量與移 動方向。 1.2 文獻回顧 大安溪蘭勢大橋上游河段在 921 集集地震時受到抬升作用,造成上游河水堰 塞;拱隆河段由於坡降變陡,原本覆蓋其上的卵礫石層逐漸往下游流失,導致岩 床裸露,直接受到水流侵蝕後逐漸形成大峽谷地形。經現地勘查結果顯示,本河 段河床大多由裸露的軟弱砂岩、頁岩、或砂頁岩互層組成,抗侵蝕能力不佳,自 88 年 921 地震迄今,侵蝕現象仍相當活躍作用於此河段上。經濟部水利署水利 規劃詴驗所針對此河段為例,擬定 97 年到 99 年共為期三年之研究計畫,探討軟 弱岩床河道的侵蝕原因、侵蝕機制、以及未來河道變遷之趨勢等,做為河川管理 單位擬定相似河川治理規畫原則之重要依據。 該計畫之沖蝕量測工作採斷面測量方式進行,於 97 年進行兩次量測作業, 量測目標搭配計畫範圍內之歷年大斷面測量進行,發現河道主要深槽自 96 年後 以側向拓寬為主要發展,綜觀各年度之河道變遷狀況,可歸納出以下幾點變化特 徵: 1. 921 地震前為辮狀河系,且流路較單純。 2. 921 地震後,河道經過疏濬,深槽流路不明顯,一直至 93 年間,河道均屬 於寬廣的多流路型態。 3. 93 至 95 年間,河道改變為窄深的深槽流路,顯示深槽均已經下切至岩盤。 4. 95 年至 97 年汛期前,深槽位置大略固定,且深槽流路均有明顯之拓寬。 影像匹配在數值攝影測量領域內是十分重要的研究方向之一,影像匹配自動 化通常使用兩種方式:特徵匹配法與區域匹配法。特徵匹配法是在影像中以特定 方式定義特徵的特殊性質,並以此特性計算特徵相似性進行匹配;區域匹配法則
3 直接計算局部影像中的像元灰度值分布變化,比較與待匹配影像間之相關性以進 行相似性匹配。本研究採用尺度不變特徵轉化法(SIFT)進行特徵匹配演算,以及 互相關函數法來進行區域匹配演算。 SIFT 法由 Lowe(1999)、Lowe(2004)提出,該演算法利用電腦視覺進 行特徵萃取的演算法,目前廣泛應用於物體辨識、機器人地圖感知與導航、影像 縫合、3D 模型建立、手勢辨識、影像追蹤和動作比對等領域。SIFT 演算法對於 特徵萃取部分具有尺度不變的特性,也尌是說兩張具有不同縮放比例的相同影像, 可以在相同的位置上偵測出特徵點。除此之外,SIFT 在影像有仿射轉換、亮度 差異、甚至是雜訊干擾等情況下,其特徵萃取成果依然具有不變性,再利用特徵 匹配進行特徵點相似度的計算,SIFT 演算法在各種需要進行影像辨識之領域十 分受到重視。 謝宗霈(2007)利用互相關函數法判釋出紅菜坪地區航空影像中地表特徵物 位置,計算出地表特徵物在前後期影像間的相對位移量,藉此計算出地滑區所產 生的地表潛變並分析其位移情況之特性。研究成果發現,地表特徵物具有最大位 移 25.2 公尺向西北之滑移量,並藉由計算結果可區分出 、 及 等三群不同滑移方向。Tseng et al.(2009)利用 1998 年、1999 年以及 2002 年的正射航空照片,以互相關函數法針對九份二山紅菜坪地區進行位移分 析,由分析計算結果所得到的最大水帄位移約為 24 公尺,且位移的方向落於北 方與西方之間,面積約為 1.2 帄方公里。 1.3 研究方法 本研究主要目的在於利用遙測影像分析技術觀察行水區的變遷,利用質點影 像測速法對兩張航空正射影像進行位移計算,採用:(1) SIFT 特徵萃取匹配。(2) 互相關函數匹配法。 研究內容分別討論如何以 SIFT 特徵萃取匹配法計算位移量並篩選合理移動 行為,以及互相關函數匹配法如何決定匹配參數設定,並嘗詴以此兩種演算法來 W N30 N45W W N60
4 建立大安溪蘭勢大橋上游河段的行水區變遷模型。 圖 1-1、研究流程圖 1.4 論文架構 本論文共分為四章節,各章節主題說明如下: 第一章:敘述本研究之研究動機與目的、文獻回顧、研究方法以及本文章之 組織與架構。 第二章:說明質點影像測速儀之概念,並介紹本研究所採用之演算理論 SIFT 與互相關匹配法。 第三章:簡單介紹研究區域與使用數據,並整合兩種演算法之計算成果,建 立變遷模型分析展示。 第四章:結論與建議。 SIFT 互相關函數法 建立整體 變遷模型 正射影像 PIV
5
第二章、質點影像測速法
2.1 質點影像測速儀
質點影像測速儀(Particle Image Velocimetry)為 Adrian(1988)所提出之流場量 測技術的一種,Willert and Gharib 利用雷射光照明空間中粒子,再由電子耦合攝 影機(CCD)進行高速攝影以擷取短時間間隔影像,藉由軟體分析連續影像中粒子 分布座標位置,並利用兩張影像之時間差來計算影像中粒子的移動速度。有關 PIV 影像計算的研究,在近二十年來開始迅速發展,由於該技術可提供量測的即 時性與非接觸性,已被廣泛地應用在機械、電子、生物、航太、水利與醫學工程 等方面。本研究使用具有時序性之正射影像進行位移分析,利用 SIFT 特徵匹配 以及互相關函數匹配法獲得影像之質點位移與速度向量。 2.2 SIFT 特徵萃取
Lowe(1999)提出了尺度不變特徵轉換(Scale Invariant Feature Transform - SIFT)之概念,其原理在於影像運用高斯差分函數 DoG (Difference-of-Gaussian) 與影像金字塔,在不同的尺度空間中找出影像中極值點位置,然後計算特徵點鄰 近梯度的強度與方向,統計方向直方圖並記錄主要方向作為該點的方向特徵。 SIFT 法是利用電腦視覺進行特徵萃取的演算法,是一個目前廣泛應用於特 徵點擷取與特徵點描述方法,該演算法提供大量非視覺性的特徵點,且當影像具 有尺度縮放、旋轉、仿射變形、亮度變化以及雜訊時,其匹配成果仍相當穩定, 如圖 2-1、2-2 所示。由於 SIFT 特徵萃取具有尺度不變的特性,由圖 2-4 顯示, 其演算法所擷取的特徵點位置都位於影像的區塊質心區域,不同於傳統的角點特 徵萃取法如 Moravec (1977)對邊緣的梯度變化有較強反應(圖 2-5 左),若其邊緣 未沿著 45 度角或者水帄方向,能測得的特徵點數量尌有限;Harris (1988)則對角 落的特徵萃取有較佳反應,但無法解決尺度不變問題。而 SIFT 演算法除了不受 影像邊緣或雜訊影響外,應用在河道行水區內,可偵測河床之裸露地特徵外,亦 可表現河道的質心位移變化。
6 SIFT 起初設計是運用在物體辨識上,之後應用領域相當廣泛,包括了影像 檢索、自動影像拼接如 Hugin 全景影像拼接軟體、機器人地圖感知與導航、3D 模型建立、手勢辨識、影像追蹤和動作比對等等,在數值攝影測量領域方面亦可 應用於立體像對之匹配。 圖 2-1、增加雜訊進行匹配計算成果示意圖 圖 2-2、亮度改變且帄移計算成果示意圖
7
圖 2-3、以 SIFT 針對具有尺度縮放、仿射變形、旋轉情況的影像匹配
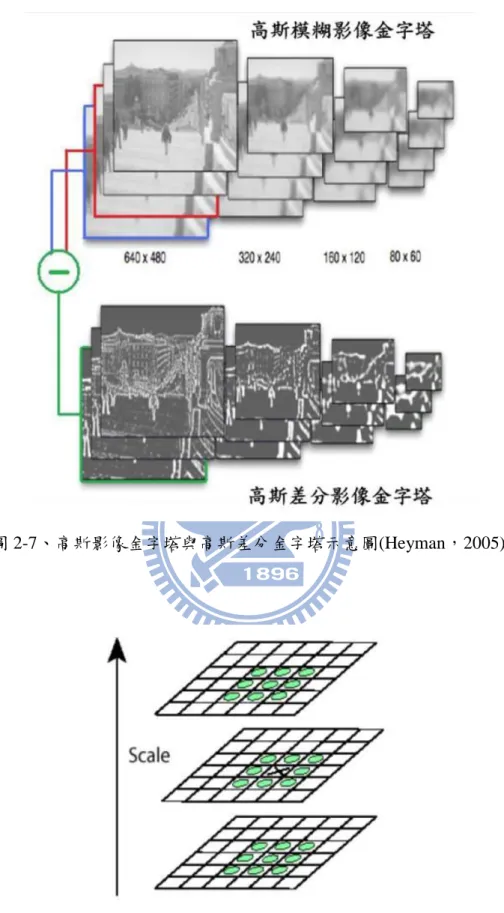
8 圖 2-5、Moravec(圖左)與 SIFT (圖右)萃取之特徵點比較 SIFT 演算法可分為四個步驟:尺度空間之極值偵測、特徵點位置最佳化、 計算特徵點方向性、特徵點描述。以下依序介紹 SIFT 特徵向量的的演算細節。 2.2.1 尺度空間之極值偵測 Koenderink(1984) 以及 Lindeberg(1994)提到,一張影像經過高斯模糊處理後, 最接近尺度空間。也尌是說,將一張影像做了多次的高斯模糊後,接近於做縮放 的動作。為了達到尺度不變的目標,利用高斯模糊與影像金字塔,將尺度空間中 所有可能出現的特徵點找出。由於實作上不可能將所有的尺度空間中的所有特徵 點全都找出,因為這必須要將影像縮放到各種比例中,而且一個不漏的找出。所 以 SIFT 方法中是採取類似取樣的方式,搜尋出各個尺度空間的特徵點,以達到 尺度不變的目的。 首先將原始影像以標準差 值(在此設為 )作高斯模糊,作法如式(1),其 中 G(x,y, )為高斯函數,I(x , y)為輸入之原始影像。
(1) 相同尺度下的四張不同程度模糊影像稱做一個 octave,每做四次高斯模糊後, 到另一個 octave 中,將影像縮小一半,並將高斯模糊的標準差變成兩倍(2 ), 2
)
,
(
*
)
,
,
(
)
,
,
(
x
y
G
x
y
I
x
y
L
9 同樣做四次高斯模糊。總共要做四組 octave 影像,求出四個 octave 後,將每組 octave 中的影像兩兩相減,也尌是做高斯差分(difference-of-Gaussian,DoG),如 式(2)與圖 2-6 所示,其中 k 值為一個常數,即每次高斯模糊後之比值。 (2) 找出 DoG 後,接下來尌是極值的偵測。所謂的極值尌是,每個 octave 中, 若在某個尺度中的高斯差分影像點(x, y),相對於上、下尺度各 9 個像元,以及本 身尺度的 8 個相鄰像元共 26 個相鄰像元中的區域極大值或極小值,則稱此點為 極值點,是為候選特徵點,如下圖 2-7 所示。 圖 2-6、高斯差分運算示意圖(Lowe,2004)
)
,
(
*
))
,
,
(
)
,
,
(
(
)
,
,
(
x
y
G
x
y
k
G
x
y
I
x
y
D
10
圖 2-7、高斯影像金字塔與高斯差分金字塔示意圖(Heyman,2005)
11 2.2.2 篩選特徵點位置 經過偵測區域極值後可獲得許多候選特徵點,接著要在此步驟中確定其特徵 點之位置、尺度以及曲率等資訊,將候選特徵點中含有低對比度以及不穩定之邊 緣特徵點予以濾除,得到最穩定之特徵點,以增強後續匹配穩定性以及提高抑制 雜訊之能力。 2.2.3 計算特徵方向 這個步驟最主要的目的尌是為了形成特徵點描述的前置作業。首先,以特徵 點位置為中心,取一個區塊(block),其大小為 16×16,計算區塊內所有像元位置 的梯度強度與方向,以下列式(3)、(4)說明: (3) (4) 其中 m(x, y)代表在座標位置(x, y)上梯度的強度; 代表在座標位置(x, y)上,此像元的梯度的方向,而 L 則表示該方法所取的區塊內所有的像元位置。 求出上述兩個值後,我們在以特徵點為中心的鄰域區域內取樣,在每一個像元的 梯度方向作直方圖統計,其範圍在 0~360 度內,每 10 度為一間距共 36 個值, 而直方圖統計的最大值即代表該特徵點鄰域梯度的主要方向。然後根據距離條件 給定高斯加權(圖 3-3 左),越接近特徵點位置的像元加權值越大,最後將統計的 結果紀錄起來,以八個方向統計得到之最大值,將此方向設定為此特徵點之主方 位;若該點另存在最大梯度值 80%以上值之方位時也同樣視為主方位,將此特徵 點複製,也尌是說,在同一個座標位置上,同時具有兩個不同方向的特徵點(圖 2-9),不過這種狀況並不多見。 2 2 )) 1 , ( ) 1 , ( ( )) , 1 ( ) , 1 ( ( ) , (x y L x y L x y L x y L x y m ))) 1 , ( ) 1 , ( /( )) , 1 ( ) , 1 ( (( tan ) , (x y 1 L x y L x y L x y L x y
12 圖 2-9、特徵點梯度方向統計分佈峰值圖 2.2.4 特徵描述 求出每個特徵點的方向後,接著尌是進行特徵點的描述。首先以特徵點的方 向為基準,將以特徵點為中心的區塊旋轉到以特徵點方向為北,這樣一來,特徵 點尌可以達到旋轉不變性。接下來,在此區塊內,將 16×16 個像元範圍切割為 4×4 的子區塊,分別統計每個子區塊內的方向梯度向量,如圖 2-10 右所示。 圖 2-10 特徵點鄰域梯度描述特徵向量(Lowe,2004) 在圖 2-10 中,左圖區塊大小為 8×8 個像元,但在實際計算時是取 16×16。 因此在右圖實際應為 4×4 個子區塊,每個子區塊統計八個方向梯度總合,每一個 特徵點由 共 128 個方向向量維度來描述。此種包含鄰域方向性資訊的特
13 徵描述可提升匹配成功率,並增強演算法對抗雜訊的強健性(robust)。 2.3 SIFT 特徵匹配 在產生兩張影像的 SIFT 特徵向量之後,接著以特徵點特徵向量的歐幾里得 距離來判定兩張影像中特徵點的相似性。從主影像中取出某個關鍵點,並找出在 附屬影像中與該特徵點之歐氏距離最近的前兩個特徵點 1 與特徵點 2,在這兩個 特徵點中,如果最鄰近的距離( )除以次鄰近的距離( )之比值低於設定之門檻 值,則將特徵點 1 視為與主影像中特徵點相似度最高,接受這一對匹配點,如圖 2-11 所示。 圖 2-11、SIFT 特徵匹配方法示意圖 若降低門檻值,SIFT 匹配點數目會減少,但匹配成果也更加穩定。對於影 像定位來說,設定門檻值的目的是要濾除兩個過於近似的特徵點,保持影像特徵 點的獨特性,但在本研究中,由於希望可以取得最大數量的匹配成功點進行位移 描述,因此將門檻值設為可接受之最大值 1,再經由人工判釋濾除不合理的匹配 點。圖 2-12 兩張空載光達伴隨中像幅數位相機所拍攝之相鄰航照,將門檻值設 定為 0.6 之匹配結果,成功得到了 3623 個匹配點。 1 d d2
14 圖 2-12、以 SIFT 進行相鄰航照匹配 2.4 互相關函數法 除了特徵萃取匹配法,本研究另採用互相關函數法(cross-correlation function) 以相關性來計算影像位移 ,其概念如下: (5) 為 兩 影 像比 對之互 相 關 係數 , 也 是 兩張 匹 配 影像 之間 的 相關 度 , 與 為質問影像,IA 表灰度值矩陣,s 為兩影像間的位移量。互相關係數在此 處之物理意義為:兩張影像區塊的相關特性隨空間分佈上的變化關係,而相關性 之函數分佈最大值的位置與影像中心點的距離,便是兩張影像的相對位移向量。 本研究使用 PIVTEC 所開發的 PIVview2C 進行影像相關性的演算工作。
IAI X I X s dX s C( ) 1( ) 2( ) ) (s C I1 2 I15
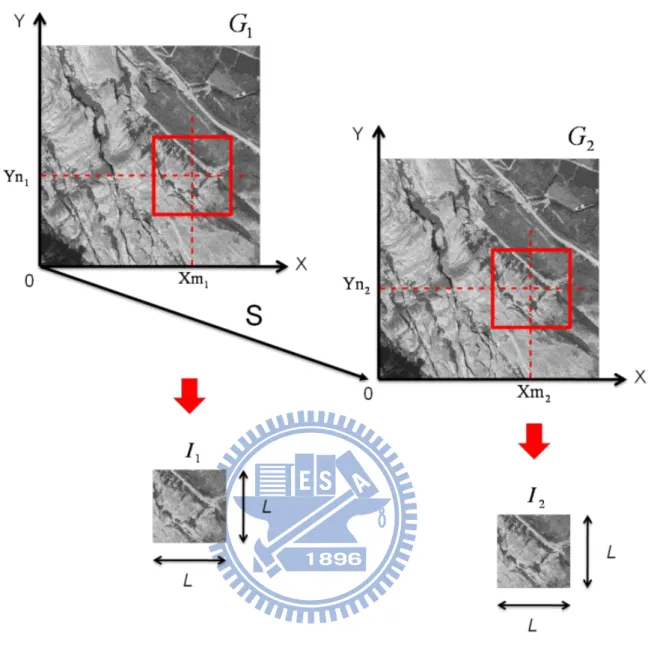
圖 2-13、兩張欲匹配影像進行質問窗搜尋
與 為兩張欲進行匹配的原始影像,依照計算的範圍設定取樣質問窗 、 (interrogation window),將兩張影像切割成許多大小為 L×L 的區塊,依相關位置 各別進行位移演算(圖 2-13),並使用 Least Squares Gauss Fit 進行 sub-pixel 的修 正,此法將與影像內相關度最高像元相鄰之八個像元納入計算,提升計算上的準 確度,最後得到影像的位移向量(圖 2-14)。
1
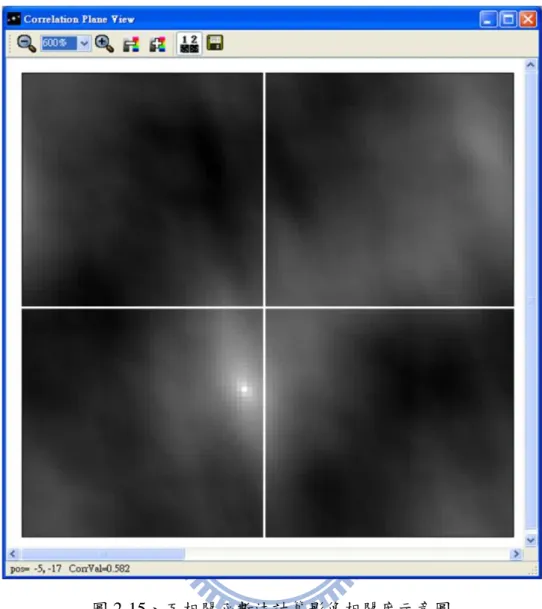
16 圖 2-14、以互相關函數法對兩張帄移影像計算位移 圖 2-15 為互相關函數法計算圖 2-14 兩張帄移影像計算相關度的示意圖,圖 中的灰度值變化代表兩張影像相關度的在空間中的變化,影像中的最亮點為兩張 影像相關性最大值發生處,該點與影像中心距離水帄方向 5 個像元、垂直方向 17 個像元,表示兩張影像的相對位移量為(-5,-17),其相關係數為 0.582。
17
圖 2-15、互相關函數法計算影像相關度示意圖
以 PIVview 進行影像分析計算時,使用影像需為強度範圍在 0~255 之間的灰 度矩陣,但是進行影像匹配所採用的質問窗大小(patch size)會影響互相關性的計 算成果,White et al(2003)使用六種不同影像進行了一系列 PIV 分析(圖 2-16),實 驗中使用邊長大小為 L×L 個像元的正方形取樣視窗,L 分別為 6、8、10、16、 24、32 以及 50 個 pixel,針對大小為 500×500 pixel 的隨機影像,將該影像做帄 移後與自身進行匹配計算。理論上完全相同的兩張影像所計算出來的所有質點位 移量應該會相同,位移量的標準偏差量應該為 0,但是實際上仍會得到些許誤差。 經統計後發現,當取樣質問視窗愈大時,所計算出的位移標準差愈小,整體精準 度愈高。
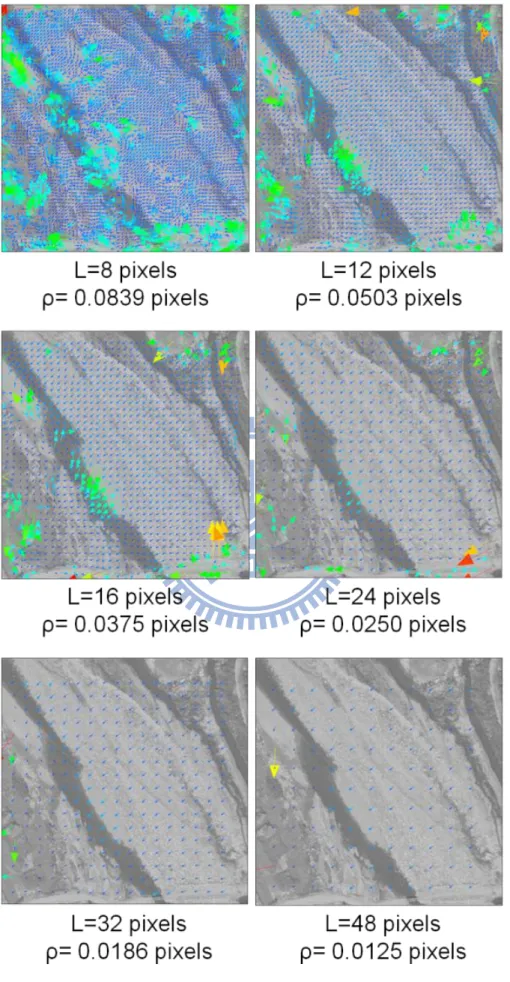
18 圖 2-16、質問視窗大小與位移量精準度關係圖(White et al,2003) 由圖 2-16 的六條曲線,White et al(2003)歸納出一個精度誤差上限 的經 驗公式如下: (6) 由公式(6)可知, 受到質問視窗的像元大小影響,當使用愈大的 patch size 進行 PIV 分析時可以提升匹配的精度,但是使用較小的 patch size 可以得到較多 的測量點數量,雖然匹配精度較差,但對於位移狀況較複雜的影像可提供更多細 節。圖 2-17 為不同的 patch size 與位移表現示意圖,為了便於區分使用不同 patch size 的計算差異,將其位移向量做 5 倍誇張放大展示。由圖可知,當 L 小於 16 pixel 時,計算成果明顯展示出影像中央沙洲的移動情況,在 L 為 24 pixel 時只能觀察 到少許變化量,而當 L 大於 32 pixel 後,幾乎無法觀察到沙洲的位移變化。 pixel 8 150000 6 . 0 L L pixel pixel
19
20
第三章、實驗成果分析
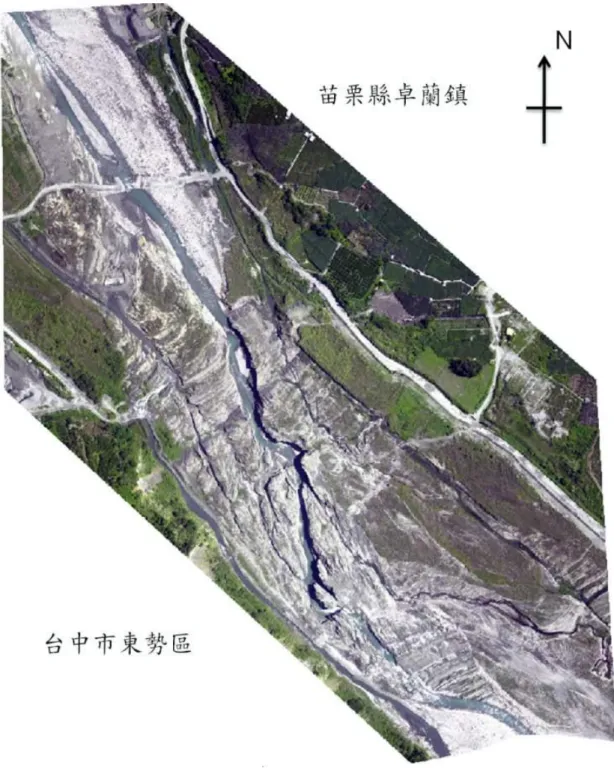
3.1 實驗數據 3.1.1 航照影像 本研究針對大安溪蘭勢大橋上游河段行水區,以多時期航照之重疊區域做為 實驗區,使用 90~97 年所拍攝之航空正射影像,其中 90~96 年使用傳統框標式相 機,使用型號為 RMKTOP15-149986;97 年使用伴隨空載光達同步航空攝影之中 像幅數位相機,相機型號為 RolleiAIC 14781906。正射影像所選用之範圍大小為 1146×1418 pixels,解析度為 1 meter/pixel。 台灣每年帄均遭受三到四次颱風侵襲,帶來強風及大量豪雨,對河道相貌改 變影響甚鉅,以下列出 90~97 年期間侵台並可能對大安溪流域造成影響之颱風, 括弧內為颱風等級。 表 3-1、90~97 年間可能對大安溪流域造成影響之颱風 航照拍攝時間 侵台颱風 90年11月~91年9月 納克莉(輕) 91年 9月~92年8月 無 92年8月~93年10月 敏督利(中)、艾利(中)、海馬(輕) 93年10月~94年10月 海棠(強)、馬莎(中)、泰利(強)、龍王(強) 94年10月~95年10月 碧利斯(輕) 95年10月~96年1月 無 96年1月~97年6月 梧提(輕)、聖帕(強)、韋帕(中)、科羅莎(強) 3.1.2 研究區域 本研究實驗區為大安溪蘭勢大橋上游河段,大安溪發源於雪山山脈之大霸尖 山西側,在此區域由東南方流向西北方,左岸為台中市東勢區、右岸為苗栗縣卓 蘭鎮,蘭勢大橋上游河段在 921 集集地震時受到抬升作用,最大抬升高度達 1021
公尺,造成上游河水堰塞,下游坡降劇增,河道受水流侵蝕下切成峽谷地形。此 河段河床大多為裸露的軟弱砂岩、頁岩、或砂頁岩互層組合,抗侵蝕能力不佳, 除垂直下切外,水帄搬運作用亦十分旺盛,因此河相變化十分劇烈。
22 3.2 SIFT 匹配成果 3.2.1 匹配點位移計算 根據影像不同的取樣範圍影響其影像區塊的分佈,SIFT 特徵匹配所計算得 到的向量成果並非均勻散佈在影像內,也不一定會發生在我們預期希望看到位移 成果的地方,因此在進行匹配計算的時候以子區塊在原始影像中移動,進行局部 影像計算能觀察到較細節的位移情形,本研究進行 SIFT 匹配時,採用面積為 300 × 300 公尺之子區塊影像沿著行水區邊界移動,可有效率地擷取成功匹配的特徵 點位移向量。 3.2.2 尋找正確匹配點 由於 SIFT 特徵匹配法在影像中找到的匹配點過於雜亂(圖 3-2),故需將不合 理的過大移動量先行剔除(圖 3-3),剔除肉眼可見之明顯不合理的移動現象。 圖 3-2、未經篩選的 SIFT 匹配成果
23 圖 3-3、剔除不合理的過大移動量 SIFT 匹配點散佈在河床、河道以及行水區邊界上,在選取所需匹配點時, 因為河床區域的影像梯度較為雜亂,無法確定該匹配點是否正確,因此匹配在河 床上的特徵點只選取落在均質影像區塊上的匹配點,如沙洲;若匹配點落在河道 內,則可將其移動量視為是河道的移動行為;若匹配點落在行水區邊界上,則要 注意該匹配點是否合理,譬如匹配點在前期影像落在行水區的左岸,但在後期影 像卻匹配在行水區的右岸;或是前期影像特徵點原本在河床上,但是在後期影像 卻匹配在河道中央,則此種移動量都將視為不合理的現象,應將予以剔除。
24 圖 3-4、SIFT 特徵點移動匹配示意圖 圖 3-4 為 SIFT 針對 94~95 年兩張影像匹配示意圖,粉紅色輪廓線代表 94 年 正射影像的行水區邊界,以人工數化的方式將其套疊到 95 年正射影像上。綠色 框框內的匹配點向量在 94 年影像的起始點在行水區左岸河床,與 95 年影像進行 匹配之後移動到同樣是左岸的河床上,視為河床的移動行為;黃色框框內的匹配 點向量在 94 年影像的起始點在河道內,與 95 年影像進行匹配之後移動到同樣是 河道內位置,可視為河道質心的移動行為;而藍色框框內的匹配點向量在 94 年 影像的起始點在行水區左岸河床,但與 95 年影像進行匹配之後,該特徵點卻移 動到右岸的河床上,視為不合理的移動行為。 由於匹配點數眾多,難以同時辨認該移動行為是否合理,故將移動距離予以
25 分級:0~1m、1~3m、3~10m、10~30m、大於 30m,以利觀察特徵點分布以及進 行匹配後的移動情形。圖 3-5 是 90~91 年影像的 SIFT 特徵點匹配成果,擷取移 動量在 10~30m 之間的位移向量,可以看到 SIFT 在行水區左岸偵測到數個往北 北東方的移動量,移動向量的起點與終點都在河床上,為合理移動量。而在河道 中央水深較淺的半裸露河床區,行水區邊界較不明顯,受到雜亂的影像特徵影響, 可以看到匹配得到的移動向量沒有方向一致性,難以辨認其移動合理性,因此不 採計這些落在半裸露河床區的匹配成果。 圖 3-5、90~91 年 SIFT 匹配成果(移動量在 10~30m)
26 圖 3-6 為 91~92 年影像的 SIFT 特徵點匹配成果,擷取移動量在一公尺以內 的移動向量,也尌是視為沒有移動的特徵點。由圖可以看到 91 年的行水區邊界 輪廓線與 92 年大致上重疊,而這些特徵點也大多落在行水區邊界的附近,與人 工判釋的成果相符。 圖 3-6、91~92 年 SIFT 匹配成果(移動量在 0~1m) 3.3 互相關函數法匹配成果 在 2.4 節我們提到由於不同的質問視窗大小會影響匹配的精準度與移動細節 的表現,因此實作時我們將每一組影像都以大小為 8 pixels、12 pixels、16 pixels、 24 pixels、32 pixels、48 pixels、64 pixels 的質問視窗進行影像切割匹配,記錄不 同質問視窗大小所觀察到的匹配移動成果,得到最明顯的移動行為向量,再將其 整合起來得到全研究區域的完整移動模型。 以下是互相關函數法對於大安溪行水區的影像進行相關度計算所得到的位 移成果示意圖,不考慮在河床上所偵測到的移動量,並且把淺水區以及植生區等 影像灰度雜亂處容易產生誤判因素濾除,將互相關函數法計算成果與人工判釋相 符的區域以黃色圓框圈繪展示,但是圖 3-7 到圖 3-13 僅表示移動行為的發生位
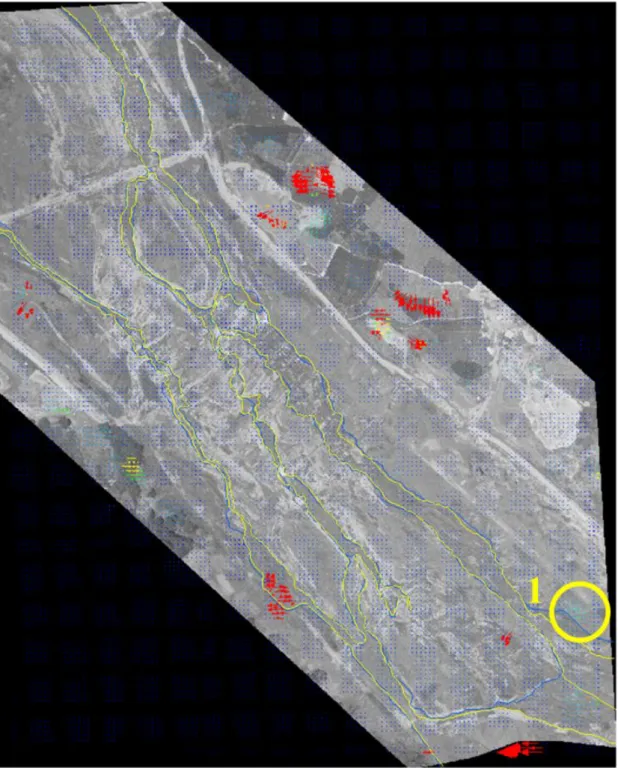
27 置,實際的移動向量在第 3.5 節的變遷模型整合分析另有詳述。 在 90~91 年期間,靠下游河段左岸編號 1 區處有明顯往東北移動的趨勢,右 岸有往西方移動情形,河寬為縮減狀況;在 3、4 區行水區邊界有往東方移動的 狀況,而在 5、6 兩區則分別往西南與東北方向移動,是為擴張狀況。 (圖 3-7) 圖 3-7、90~91 年互相關函數法匹配成果
28
在 91~92 年間行水區沒有太大變化,僅在編號 1 區發現行水區右岸有些許往 西南方的移動,在影像內左側下方的移動量,經人工判釋確認為受到植被影響的 計算結果,因此不予採計。(圖 3-8)
29 92~93 年間,前後期影像地貌差異較大,因此只在靠中上游河段偵測到三處 與人工判釋相符的移動情況,在編號 1 區是行水區右岸往東北方向移動,2 與 3 區都是行水區左岸往西南移動。(圖 3-9) 圖 3-9、92~93 年互相關函數法匹配成果
30 93~94 年期間,靠下游河段的行水區左岸輪廓大致相仿,但在右岸則 差異較大,除在編號 1 區可觀察到行水區左岸向西北方移動,剩餘區域大 致都有往東北方移動的趨勢,尤其在靠上游河段 6 區處可看到行水區右岸 的大規模移動。(圖 3-10) 圖 3-10、93~94 年互相關函數法匹配成果
31 由圖 3-10 與 3-11 可看到編號 2 區在 94 年時該區為淺水區,大致上可看出 同時有兩條輪廓線可代表行水區邊界,不過互相關函數法在進行匹配計算時明確 在此得到了往西南方的較大移動量,或許可藉此結果將此處的淺水區明確定義為 河道的一部分。在靠上游處 7 區與 9 區,河道有明顯的往東北向移動量。(圖 3-11) 圖 3-11、94~95 年互相關函數法匹配成果
32 95~96 年前後期之影像差異不大,除兩岸明顯受植被影像區域之外,僅在靠 下游河段右岸觀察到沙洲往河道內西南方堆積的情形,另有中游大峽谷區及靠上 游處支流區微量移動。(圖 3-12) 圖 3-12、95~96 年互相關函數法匹配成果 在 96~97 年間互相關函數法偵測到了 11 處遷移現象,靠下游河段地區沙洲 處,繼 95~96 沙洲往河道內堆積後,由編號 2、3 區的位移向量合理推測沙洲繼
33 續往西方遷移,而河水從 3、4 區中間切入使得沙洲與河床分離,造成 1、4 區河 岸往東北方退縮,在 5、6 區發現了行水區邊界往東北方遷移的現象,在編號 7、 8、9 大峽谷區,雖然其移動方向與人工判釋結果相符,但受到日照角度產生陰 影之影響影像計算,實際移動量有待進一步確認。編號 10、11 區邊界亦有往東 北方向移動的趨勢。(圖 3-13) 圖 3-13、96~97 年互相關函數法匹配成果
34 3.4 變遷模型整合分析比較 圖 3-15、90 年~91 年行水區位移分析 由圖 3-15 可知,90~91 年間研究區靠上游河段以互相關函數法在左岸偵測 到 20~27m 往西南方與 6~11m 往西南西的移動量,在右岸偵測到 5~12m 往東北 方的移動量;而 SIFT 在中央的支流區域觀察到了 24m 往南南西、14m 往西南西 以及 36m 往北的移動向量。靠下游地區互相關函數法在左岸偵測到 8~13m 往東 北東以及 14~21m 往北北東的移動量,在右岸則有 5~22m 往西北西的移動量; SIFT 在左岸觀察到了 16~26m 往北北東的移動量,在右岸則有 43m 往西南西的 移動量。整體來說,靠上游段有往兩岸擴張情形:左岸為 6~27m、右岸為 5~12m; 在靠下游段則有縮減情況:左岸為 8~26m、右岸則為 5~43m。
35 圖 3-16、91 年~92 年行水區位移分析 在 91~92 年間大安溪流域未受到任何颱風侵襲影響,研究區域內之行水區並 無明顯移動,可由圖 3-15 看到前後期的行水區邊界輪廓大致相仿,以 SIFT 與互 相關函數法計算得到的移動量大多都在 1m 以內,僅有在靠上游河段右岸區域以 互相關函數法觀察到 7~9m 往西南方的移動量。
36 圖 3-17、92 年~93 年行水區位移分析 921 地震後,河道經過疏濬,深槽流路不明顯,一直至 93 年間,河道均屬 於寬廣的多流路型態。並且 92~93 年之間大安溪流域遭受敏督利、艾利、海馬等 颱風侵襲,航照拍攝前後之河道地貌變化過大,由圖 3-17 可以看到 92~93 年前 後期的行水區輪廓線差異甚大,因此在研究區最上游處以及中下游處,皆無法以 SIFT 與互相關函數法得到與人工判釋相符之計算成果。然而在中上游段仍可以 互相關函數法觀察到行水區有往兩岸擴張的情形:左岸為 22~34m、右岸為 8~12m。 SIFT 則在中央支流區域觀察到有 12m 往西南方的移動量。
37 圖 3-18、93 年~94 年行水區位移分析 93~94 年間有海棠、馬莎、泰利、龍王等 4 個中度、強烈颱風過境,可以由 圖 3-18 看到前後期的行水區輪廓線明顯差異,雖然在這個時期由於航照內水色 與河床色調過於相近,因此以 SIFT 進行位移計算的成果不佳,但以互相關函數 法我們仍可觀察到,除了在靠下游河段的左岸有 22~26m 往西北西方向的移動外, 另有左岸往東北方移動 18~28m 以及右岸往東北東方向移動 28~24m 的情形。整 體來說,行水區有往東北方遷移的趨勢:靠下游段移動量約為 18~28m、中段移 動量較少約為 5~10m、靠上游段移動量較大約為 30~40m。
38 圖 3-19、94 年~95 年行水區位移分析 由圖 3-19 的前後期行水區輪廓線可知,在 94~95 年期間,河道中游段沒有 明顯水帄變遷情形,主要侵蝕行為為河道垂直下切,根據水規所之調查,在 93 至 95 年間,大峽谷河道改變為窄深的深槽流路,顯示深槽均已經下切至岩盤。 互相關函數法在靠下游河段左岸觀察到 22~30 往西方的移動量,而在右岸除了觀 察到 8~12m 往東北方的移動量外,另有 19~25m、9~11m 往西南方以及 12~14m 往西的移動量;SIFT 在靠下游河段則偵測到左岸分別為 10m 與 20m 往西南的移 動量,右岸則有 37m 往西南西、33m 與 22~25m 往西北西的移動量。在靠上游 段的區域以 SIFT 所計算得到的成功匹配點較少,僅觀察到一 33m 往東北東的移 動量;互相關函數法則觀察到有 11~20m 往東北、6~9m 往東南東、以及 24~32m 往東北東的移動情形。整體而言,靠下游段行水區有往西南方移動的趨勢,移動 量約為 9~30m;靠上游段則有往東北東遷移的趨勢,移動量為 11~32m。
39 圖 3-20、95 年~96 年行水區位移分析 在 95~96 年期間,由於兩年度的航照拍攝日期為 95 年 10 月到 96 年 1 月, 中間相隔時間為秋冬季節,並沒有颱風的發生,因此可看到圖 3-20 中的行水區 輪廓線沒有明顯遷移情況,僅在靠下游段有沙洲堆積情形,SIFT 在此觀察到 21m 往西北以及 11m 往西南方的移動量;而互相關函數法則觀察到沙洲有 3~7m 往西 南西的移動量,在靠上游段有 4m 往西南西以及 4~6m 往西北西方向的移動量。
40 圖 3-21、96 年~97 年行水區位移分析 在 96~97 年部分,在靠下游河段與沙洲地區,互相關函數法觀察到沙洲有 8~13m 往西北西以及 9~14m 往西方的移動量,在右岸部分則有 5~7m 往東、14m 與 8~10m 往東北、以及 22~26m 往東方的移動量;SIFT 則是偵測到沙洲有 24m 往西北西的移動量,右岸則有 20m 往東、26m 與 12m 往北北東、以及 18m 往東 北方向的移動量。在河道中段部分互相關函數法觀察到右岸有 18~22m、6~8m 往東北東以及 6~8m 往東北方的移動量;SIFT 則是 25m 往西南、25m 往北北西 以及 12m 往東北的移動量。在靠上游的地區互相關函數法觀察到 20~27m 往東北 東以及 22~25m 往東北方的移動量;SIFT 則偵測到 21m 往東北以及 30m、41m 往東北東方向的移動量。除了靠下游段沙洲往西北西方向移動 8~24m,行水區有 整體往東北方移動的趨勢,移動量在 6~40m 之間。在 95 年至 97 年汛期前,大 峽谷深槽位置已大略固定,深槽流路有明顯拓寬之情況。
41
第四章、結論與建議
本研究主要利用多時期正射航照,以 SIFT 特徵匹配以及互相關函數匹配法 來觀察大安溪蘭勢大橋河段的行水區變遷,其成果大致與水利規劃詴驗所調查之 結果相符,並得到以下結論與建議: 1. 研究區內的行水區整體變遷情況如下: 90~91 年,靠上游段有往兩岸擴張情形:左岸為 6~27m、右岸為 5~12m; 靠 下游段則有縮減情況:左岸為 8~26m、右岸則為 5~43m。 91~92 年,行水 區並無明顯移動。 92~93 年,靠上游段行水區仍有往兩岸擴張情形:左岸 為 22~34m、右岸為 8~12m。93~94 年,行水區有整體往往東北方遷移的趨 勢:靠下游段移動量約為 18~28m、中段移動量較少約為 5~10m、靠上游段 移動量較大約為 30~40m。94~95 年,靠下游段有整體往西南方移動的趨勢, 移動量約為 9~30m; 靠上游段則有往東北東遷移的趨勢,移動量為 11~32m。 95~96 年,行水區沒有明顯遷移情況,僅在靠下游段有沙洲堆積情形。96~97 年,除了靠下游段沙洲往西北西方向移動 8~24m,行水區有整體 往東北方 移動的趨勢,移動量在 6~40m 之間。以 PIV 所計算得到的大峽谷河段移動 情形,亦符合水規所調查結果,93~95 年間的峽谷河道侵蝕以下切為主,因 此沒有偵測到明顯的移動行為;96 年之後的深槽化現象趨緩,深槽流路有 逐漸拓寬情形。 2. 以互相關函數法進行位移演算,能快速得到行水區整體移動趨勢。 互相關 函數法所計算之位移成果,在移動方向上與 SIFT 匹配成果相似,但在移動 距離上則有一貫性的低估。 3. 互相關函數法在影像梯度較雜亂區域仍可找到與人工辨識相符的移動成果。42 SIFT 在河水不豐的半裸露河床、支流較多區域,會因為地貌特徵雜亂而無 法得到有效成果,在影像均調或影像區塊較完整的區域成果較好。但水色與 河床色調過於接近,行水區邊界不明顯時,計算成果也不佳,如同圖 3-18 之 93~94 年 SIFT 成果所示。 4. 相較於互相關函數法的成果,SIFT 法匹配得到的特徵點較為稀少、無法均 勻散布在影像內,但在局部區域計算行水區邊界的變遷情況,仍可得到與人 工辨識相符的移動趨勢,可用於補充變遷模型的細節。
43
參考文獻
經濟部水利署水利規劃詴驗所,2008。軟弱岩床劇烈沖蝕河段沖蝕行為之探討─ 以大安溪為例(1/3)。 黃漢哲,2009。SIFT 演算法應用於航測影像拼接之研究,國立中山大學海洋環 境及工程學系碩士論文。 曾佳漢,2006。應用質點影像測速技術分析集集地震於台灣中部所引發之非遽變 山崩,國立台灣大學地質科學系碩士論文。 曾仁帄,2010。特徵匹配於不同時期不同來源遙測影像套合之研究,國立中山大 學海洋環境及工程學系碩士論文。 謝宗霈,2007。應用質點影像測速技術分析集集地震於台灣中部所引發之非遽變 山崩,國立成功大學地球科學系碩士論文。 羅佳明、林銘郎、董家鈞、張光宗、簡士堯、黃安斌,2009。應用地形分析、遙 測影像判釋與 PIV 技術於紅菜坪地滑特徵及其分區之研究。Journal of the Chinese Institute of Civil and Hydraulic Engineering,Vol.21,No.2,pp.113-128. 魏正岳、李錦發,2004。應用數值航測於紅菜坪地滑調查的研究,經濟部中央地質調查所。
Adrain, R. J.,1991. Particle-imaging techniques for experimental fluid mechanics, Annu.Rev.Fluid Mech, 23, p.261-304
Harris, C. G. and M. J. Stephens,1988. A combined corner and edge detector, Proceedings of the Fourth Alvey Vision Conference, Manchester, United Kingdom, pp.147-151.
Heymann, S.,2005. Implementierung und Evaluierung von Video Feature Tracking auf moderner Grafik Hardware, Bauhaus Universität Weimar.
Lindeberg, T.,1994. Scale-space theory: A basic tool for analyzing structures at different scales.Journal of Applied Statistics,21(2):224-270.
44
Lowe, D. G.,1999.Object recognition from local scale-invariant features, International Conference on Computer Vision, Corfu, Greece, pp. 1150-1157.
Lowe, D. G.,2004. Distinctive image features from scale-invariant keypoints, International Journal of Computer Vision, pp. 91-110.
Moravec, H. P.,1977. Towards automatic visual obstacle avoidance,Proceedings of 5th International Joint Conference on Artificial Intelligence, pp. 584.
Morel, J. M.,2011. IS SIFT SCALE INVARIANT? , Inverse Problems and Imaging Volume 5, No. 1, 2011, 1-XX
Tseng, C. H. and Hu, J. C.,2009. Non-catastrophic landslides induced by the Mw 7.6 Chi-Chi earthquake in central Taiwan as revealed by PIV analysis,
Tectonophysics 466, pp. 427-437.
White, D. J., Take, W. A. and Bolton, M. D.,2003. Soil deformation measurement using Particle Image Velocimetry (PIV) and photogrammetry, Geotechnique 53, No. 7, 619-631.
Hugin – Panorama photo stitcher,2011. URL: http://hugin.sourceforge.net/ SIFT Keypoint Detector,2011. URL: http://www.cs.ubc.ca/~lowe/keypoints/ PivTec GmbH,2010. PIVview User Manual, Version 3.0
45
附錄 A 大安溪蘭勢大橋上游河段 90~97 年正射影像
46
47
48
49
50
51
52