行政院國家科學委員會專題研究計畫 成果報告
多模車機整合技術暨先進安全駕駛輔助系統--子計畫五:車
載即時交通資訊作業資料庫建立(3/3)
研究成果報告(完整版)
計 畫 類 別 : 整合型 計 畫 編 號 : NSC 95-2218-E-002-032- 執 行 期 間 : 95 年 08 月 01 日至 96 年 07 月 31 日 執 行 單 位 : 國立臺灣大學土木工程學系暨研究所 計 畫 主 持 人 : 曹壽民 共 同 主 持 人 : 朱松偉 計畫參與人員: 碩士級-專任助理:吳耿毓 碩士班研究生-兼任助理:歐俊輝 處 理 方 式 : 本計畫可公開查詢中 華 民 國 96 年 07 月 30 日
目錄
目錄……… 1 表目錄……… 2 圖目錄……… 3 第一章 前言……… 4 第二章 研究目的……… 4 第三章 文獻回顧……… 5 第四章 研究方法……… 36 第五章 結果與討論……… 46 第六章 計劃成果自評……… 51 參考文獻……… 52表目錄
表 3.1 經驗實例之交通管理系統之主要相似功能分析比較表……… 26 表 3.2 國內外數位式行車紀錄器比較表……… 34 表 3.3 傳統行車紀錄器與數位式行車紀錄器的各項比較……… 35 表 3.4 傳統行車紀錄器與數位式行車紀錄器的各項比較(續)……… 35 表 5.1 道路服務水準決策樹之各節點模式表……… 46圖目錄
圖 3.1 GPS 系統架構示意圖……… 6 圖 3.2 GPS 衛星分佈示意圖……… 6 圖 3.3 GPS 衛星定位示意圖……… 8 圖 3.4 座標系統轉換軟體操作介面圖……… 9 圖 3.5 斯圖加特 STORM 系統架構示意圖……… 22 圖 3.6 果川市 ITS 示範計畫之推動過程……… 23 圖 3.7 果川市 ITS 示範計畫之系統建置……… 24 圖 3.8 機械式行車記錄器圓形行車記錄紙卡……… 29圖 3.9 德國 Siemens VDO 公司之 DTCO1381 數位式行車紀錄器……… 30
圖 3.10 澳洲 Circuitlink 公司之 Tacholink Millenium 數位行車紀錄器……… 31
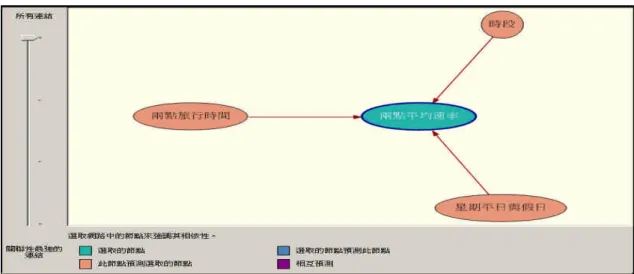
圖 3.11 MBCD 數位式行車紀錄器……… 32 圖 3.12 寶錄股份有限公司之 BR-6822 數位行車紀錄器……… 32 圖 3.13 康訊科技股份有限公司之偵航家 3010 數位行車紀錄器……… 33 圖 3.14 樺崎實業股份有限公司代理的 Siemens VDO 數位行車紀錄器……… 34 圖 4.1 資料處理流程圖……… 37 圖 4.2 HAS101 之解碼程式……… 40 圖 4.3 AeroMerge 1.0 合併程式……… 41 圖 4.4 Visual Basic 程式語言……… 42 圖 4.5 建立完整資料庫圖……… 42 圖 4.6 匯出轉成 DBF 檔格式……… 43 圖 4.7 環域分析圖……… 44 圖 4.8 區分南北向圖……… 44 圖 5.1 道路服務水準之決策樹模式圖……… 48 圖 5.2 道路服務水準決策樹模式之相依程度圖……… 48 圖 5.3 道路服務水準決策樹模式之散佈圖……… 49 圖 5.3 署立醫院到龍祥里間行駛路段散佈圖……… 50 圖 5.5 署立醫院到龍祥里間行駛路段折線圖……… 50
第ㄧ章 前言
目前我國在推動智慧型運輸系統時,已針對台灣地區之交通特性與使用者需求,研 訂出系統發展的架構,並研擬短、中、長程發展計畫與各界分工規劃。而為達成此一目 標,先進交通管理系統(Advanced Traffic Management Services,以下簡稱 ATMS)之發 展因應而生,該系統係在現有的道路上,進行交通狀況之預測、交通管理策略之分析、 評估與執行整體性的交通管理,並將相關資訊傳送給用路人,以達到運輸效率最佳化與 運輸安全之目的,為 ITS 發展的基礎與核心。 經由有效率地蒐集交通資料並加以彙整處理,且適時地將即時而正確的交通資訊傳 送給運輸系統營運業者與國道高速公路局管理者。一方面使營運業者可以掌握即時路 況,有效地調派車隊;另一方面管理者亦可以透過交通管理策略之運用及交通資訊之發 布,使用路人得以避開擁擠路段、節省旅行時間與提高道路行駛速率;用路人也可利用 得到的即時資訊進行個人旅次規劃。如此,不僅可以改善運輸系統使用的環境,而且亦 可以減輕用路人使用運輸系統的壓力。 目前國內在 ATMS 方面相關技術已成熟的有高速公路交控系統、都市電腦號誌控制 系統、事件自動偵測及匝道儀控等設施實地運作,其它尚在持續發展中之技術如電子收 費、動態交通號誌系統、自動車輛辨識及行車路線導引系統等。
另一方面,近年來利用裝置具備全球衛星定位系統(Global Position System 以下簡稱 GPS)、無線通訊等功能車上單元(On Board Unit,以下簡稱 OBU)之探針車(Probe Vehicle)進行交通資訊的蒐集,隨著實際蒐集交通資訊之探針車的數量增加,以及相關 理論與應用等研究成果之發展,而逐步變成即時交通資訊蒐集之主流。因此,若能透過 探針車提供 ATMS 上所需之相關數據,實為成本較低且應用性更廣之選擇。
第二章 研究目的
成果得以落實執行,本研究擬從建置車載即時交通資訊作業資料庫的角度切入,並以程 序性的思考邏輯,進行車載即時交通資訊作業資料庫程式之建構、測試、實證與應用等 研究項目。有關本研究計畫之具體的研究目的包括:(一)回顧相關文獻以瞭解國內外有 關先進旅行者資訊系統(ATIS)與先進交通管理系統(ATMS)之發展現況,內容包括全球衛 星定位系統(GPS)、交通資訊系統、車載裝置系統等項目。(二)進行車載即時交通資訊作 業資料庫程式之實證,內容包括資料收集、資訊分析以及資訊應用等項目。(三)進行車 載即時交通資訊作業資料庫程式之應用,內容包括大眾運輸(例如:市區公路到站時間 預估)、交通管理(例如:服務水準評估資訊提供或旅行時間預測)以及用路資訊等項目。
第三章 文獻探討
本章將分別針對全球衛星定位系統(GPS)、交通資訊系統、車載裝置系統等項目, 進行相關文獻與研究的探討。 (一) 全球衛星定位系統(GPS) 全球衛星定位系統(GPS)其最初目的是運用在軍事導航,係是1958年美國海軍發展 導航衛星系統(Navy Navigation Satellite System, NNSS)開始,1967年開放民間使用,到 了1973年美國國防部再度研發第二代導航衛星定時測距全球衛星定位系統(Navigation Satellite Timing and Ranging Global Positioning System)簡稱全球衛星定位系統,目前已經 被廣泛推廣應用於登山、旅行、定位導航、災害監測、地圖繪製、資源探勘、土地開發、 工程測量等領域中。 全球衛星定位系統係是利用衛星所發射的無線電訊號不分晝夜、天候,以測定連 續、即時及高精度點位的三度空間座標及時間數據,其定位方法快速、簡便,精度超越 傳統測量,並且突破傳統測量之障礙,亦不需經平差計算之繁複作業,為定位技術之革 命性改變。 1. GPS 系統基本架構 全球衛星定位系統基本架構可分為三個部分,分別為太空部分(Space segment)、地面控 制部分(Control segment)及使用者部分(User segment)等三個部分,其相互關連之系統架構圖如圖1。 圖3.1 GPS系統架構示意圖 (1)太空部分:全球衛星定位系統目前係由24顆衛星組成,其中21顆為操作衛星,3顆為 備用衛星(如圖2)。分佈於6個軌道面上,每個軌道面傾斜55°,運行高度約20200公里, 繞行地球一週約需花費11小時58分,衛星設計壽命大約為7.5年,每顆衛星將其軌道參數 調製成無線電波後,以光速進行,不斷地發射訊號提供給各種接收儀器接收應用。 (2)地面控制部分:地面控制部分即操控衛星運轉之地面控制中心,也是GPS系統之心臟 中樞,分別由5個衛星監測站、1個主控站及3個發射站組成。監測站追蹤衛星訊號傳給 主控站,主控站經計算改正後傳送至發射站,以修正每顆衛星之軌道。 (3)使用者部分:持有能夠接收GPS訊號並予以解算的設備,即是GPS的使用者,也就是 一般接收儀或相關晶片或安裝接收模組的電腦設備。 圖3.2 GPS衛星分佈示意圖
資料來源:安守中,GPS全球衛星定位系統入門【6】 2. GPS定位理論 GPS 衛星定位原理係依基本三角向量關係,應用測量理論中之後方交會法,計算衛 星接收儀所在之空間座標,即由 GPS 接收儀接收衛星所發射之無線電訊息,藉接收儀 內部之處理器計算出接收儀至每顆衛星之距離,再利用衛星的已知位置計算交會出接收 儀的三維空間座標位置(如圖 3.3)。 衛星與接收儀間之距離計算方式,是以測出衛星發射無線電波至接收器所需時間乘 以光速得之"虛擬距離",應考慮衛星時鐘誤差、接收儀時鐘誤差、電離層及對流層的影 響,則虛擬距離觀測量與各種誤差之關係如式(1)。 p dion dtrop dT dt c P ( ) (1) 藉由 GPS 之定位原理,並增加一些技術細節的設計,使得測距的處理更簡易且準 確。GPS 衛星在太空軌道上運行,使用者使用接收儀器,位於某一位置開始接收衛星訊 號,當收到第一顆 GPS 衛星訊號時,以所計算出之距離為半徑,可再空間畫出一個球 面,假設若已知該顆衛星離使用者的距離(如圖 3.3a 為 11,000miles),則使用者所在之位 置必落於以衛星距離為半徑的球體上(如圖 3.3a,箭頭所指處),繼續接收第二顆 GPS 衛 星訊號時,構成兩個球面,並且交叉成一個圓,使用者位置則落於兩球體交集的範圍內 (如圖 3.3b,箭頭所指處),繼續接收第三顆 GPS 衛星訊號時,三個球面交叉將獲得兩個 空間位置點位,其中一個解可能不在地球上或者不可能之高度,可解出緯度、經度及高 程 3D 座標,則使用者位置已縮小至三球體交集的二點上,(如圖 3.3c,箭頭所指處), P:量測得知虛擬距離(公尺) :衛星到接收怡之間的真實距離(公尺) c:真空中光速(公尺/秒) dt:接收怡時鐘誤差(秒) dT:衛星時鐘誤差(秒) dtrop:對流層延遲誤差(公尺) dion:電離層延遲誤差(公尺) p :虛擬距離測量之雜訊及多路徑效應(公尺)
但因衛星的傳播訊號係依據各衛星內部之時鐘震盪時所產生之標準頻率,而接收儀時鐘 與衛星時鐘有不同步之時間差,如果要解算此項誤差,則至少要接收第四顆以上衛星訊 號,才可以精確計算地面使用者所在之位置,因此當繼續接收第四顆 GPS 衛星訊號時 即可定出使用者確切的所在位置。 圖3.3 GPS衛星定位示意圖 3. GPS座標系統 座標定位目的乃在表現某點在空間之位置,但因為地球為一不規則球體,為了方便 將地表之特徵予數值化表示及計算其座標,需將地球視為一規則之數學橢球體。GPS衛 星運行之軌道面亦為一橢圓,該橢圓的一個焦點位於地球之質心上,以方便計算其空間 位置,然而GPS的座標系統與各國座標系統間之關係,基本上是橢球體的差異,只要透 過座標轉換計算的過程及可以相容。 GPS之大地基準採用1984年公佈之參考橢球體,長半徑a=6378137公里,扁平率 f=1/298.257223563,稱為WGS84座標系統(World Geodetic System,1984)。台灣大地基準 採用1967年國際大地測量暨物理聯合學會(International Union of Geodesy and Geophysics, IUGG)所公佈之參考橢球體,長半徑a=6378160公里,扁平率f=1/298.25,稱為GRS67座 標系統 (Geodetic Reference System,1967), 也就是目前仍廣泛使用之台灣大地基準 TWD67(Taiwan Datum, 1967)。GPS觀測資料計算所得點位座標如欲與內政部發行的地形 圖套合,則必須將WGS84座標轉換成GRS67 座標系統,才可應用於現行台灣地區之大 地基準,內政部為建立完整及高精度控制點,於82年起實施衛星定位測量,建立新國家 座標系統,採用1980 年國際大地測量暨物理聯合學會(IUGG)所公佈之GRS80 參考橢球 體,長半徑a=6378137 公里,扁平率f=1/298.257222101,命名為新國家大地基準TWD97
座標系統(Taiwan Datum,1997)。 再者,由於要推估出旅行時間必須得知兩點之距離,且本研究之探針車所回傳之 WGS84座標系統經緯度無法之接運用,所以本研究在進行座標系統轉換時採用和內政部 相同之座標系統,亦即採用1980 年國際大地測量暨物理聯合學會(IUGG)所公佈之新國 家大地基準TWD97座標系統(Taiwan Datum,1997),藉以將兩點座標經由公式推算出兩點 以公尺為單位的距離。另外,本研究所使用之座標轉換工具為中央研究院GIS小組所提 供之座標轉換軟體,藉由該套軟體可將WGS84坐標系的經緯度坐標以單筆或批次的方 式,轉換成常使用的GRS67系統及TWD97系統的經緯度坐標或TM2(二度分帶坐標) (如 圖3.4)。 圖3.4 座標系統轉換軟體操作介面圖 (二) 交通資訊系統 1. 各國先進交通管理系統之發展 (1)美國先進交通管理系統發展 美國智慧型運輸系統(ITS)計畫是由美國聯邦公路總署(FHWA)於 1991 年所提出,在 ITS-America 努力下,其主要發展項目共可分為六個子系統,分別為先進交通管理系統 (ATMS)、先進旅行者資訊系統(ATIS)、商業車輛管理營運系統(CVO)、先進行車控制系 統(AVCS)、先進大眾運輸系統(APTS)及先進郊區運輸系統(ARTS),此六個子系統並不 是各自獨立的,其彼此間存有相輔相成的關係,涵蓋的各項技術也互相支援,其間的連
繫係依據 ATMS 為應用中心,其它五個應用子系統所包含的各種技術規格與標準則以符 合 ATMS 之需求而定,以達到統合一致的效果,因此健全的交通管理系統為發展智慧型 運輸系統之基本工作。(而 AHS 可視為 AVCS 技術之應用)
在 ITS 中以 ATMS 及 ATIS 之關聯性最大,兩者結合並透過資料傳送及相關有效之 演算法運算等方式,可達成路徑導引或路網轉向等功能;而 AVCS 與 ATMS 關聯部分, 主要藉由 ATMS 所提供之資訊如天候狀況、道路狀況等訊息,掌握交通動態性及變化 性,達成 AVCS 系統之目標;而 ATPS 及 CVO 與 ATMS 關聯部分,CVO 與 APTS 主要 使用 AVI、AVL、ETC、無線電等技術將資訊傳給 ATMS 或由 ATMS 獲取相關資訊,以 增進運輸業務管理系統效率或提昇車輛乘載率;而 ARTS 主要是結合 ATMS 及 ATIS 技 術,如自動事故偵測、行車路線導引、自動車輛定位等,以降低郊區道路事件所產生之 損失。 美國 ITS 計畫中對 ATMS 開發之預定目標為: (A)1992~1996 年 ‧交通監視與控制:在 15 個都市之運輸走廊內設置,並在 3 個都市與都市間之運輸走 廊設置。 ‧事故管理系統 -在 10 個都市地區建立快速處理系統 -在 3 個都市地區內建立快速偵知系統 ‧通訊方面 -以單向方式用於交通資訊 -以雙向方式用於路口之控制及監視 ‧大眾運輸系統之監視 (B)1997~2001 年 ‧設置全功能交通管理中心 ‧區域性之即時調適交通運輸控制,並讓大眾運輸優先 -在 50 個都市地區的重要運輸走廊 -在 25 個主要之都市與都市間之運輸走廊 ‧事故管理系統 -在 150 個都市地區建立快速處理系統 -在 25 個都市地區內建立快速偵知系統
‧通訊方式:以單向方式用於兩地旅行時間資訊傳輸 (C)2002~2011 年
區域性之全功能系統以管理各類地面交通運輸為主,全國性的目標為在大都市地區及重 要之市郊建立運輸走廊。
目前美國國內較具 ATMS/ATIS 推展規模的實例為:
‧休士頓運輸及危機管理中心(Houston Transportation and Emergency Management Center, 簡稱 TEMC)
‧馬里蘭州域控制中心(Maryland Statewide Operation Center)
‧亞特蘭大先進交通管理系統(Atlanta Advanced Traffic Management Center)
‧ 馬 里 蘭 州 蒙 哥 馬 利 郡 運 輸 管 理 系 統 (Montgomery County, Maryland-Transportation Management System)
‧德州聖安東尼奧先進交通管理系統(San Antonio, Texas Advanced Traffic Management System, 簡稱 TransGuide)
‧西雅圖用路人廣域資訊(Seattle Wide-area Information for Travelers, 簡稱 SWIFT) (2)歐洲先進交通管理系統發展
歐洲國家致力於道路運輸資訊技術之研發已有相當歷史,其基本發展觀點與美國智 慧型運輸系統(ITS)頗為類似,德國之 ALI、ALI-SCOUT 及 LISB,英國之 IVRG 及 AUTOGUIDE 等系統即為著名之路線導引系統。80 年代末期歐洲各國更集合群體之力 合作進行長期性之研發計畫,主要包括歐洲共同體主導之 DRIVE(Dedicated Road Infrastructure for Vehicle Safety in Europe)計畫,以及歐洲 19 國和 14 個汽車廠集資推動 EUREKA 合作計畫下之 PROMETHEUS 計畫。其中由歐洲共同體主導的 DRIVE 是以相 關道路交通管理應用技術之發展為主。
德國在致力於推動 DRIVE 計畫同時,在 90 年代初期推出 Transport Telematics 的發 展理念。就字義來源而言,Telematics 是由 Telecommunication 與 Informatics 所組合的新 名詞。Telematics 在交通運輸上的應用,亦即是智慧型運輸系統(Intelligent Transport Systems, ITS),其定義為:運用現代的通信與資訊科技,提供交通參與者即時的 (real-time) 交通資訊,並給予適時的導引及保持相互間的聯絡。
運輸決策官員期望從增加 Telematics 的使用中得到下列幾點效益:
‧運輸的個別模式將互相連結以便創造一個整體運輸系統的效率,改善交通體質及減少 和避免交通壅塞。
‧藉由改善龐大的車流量可將基礎建設的功能得以更有效率的彰顯。 ‧運輸與旅行的連鎖將得以形成。 ‧交通安全的增強。 由以上得知 Transport Telematics 的主要重點是以交通運輸系統整合推展為基礎的管 理模式,透過公共運輸系統之間的即時交通資訊的處理與交換運作,達到增進交通安全 及行車/旅行便捷之目的。 目前歐洲國家較具先進交通管理系統的規模者,仍以德國為推展與實作較積極之國 家,其中以慕尼黑(Munich)COMFORT 和斯圖加特(Stutgart)STORM 較具代表性。慕尼 黑的 COMFORT 交通管理系統有高速公路與捷運的接駁服務,在高速公路上靠捷運站地 方以資訊可變標誌顯示高速公路的壅塞資訊、轉乘站的停車資訊及大眾運輸工具資訊, 供駕駛人選擇停車轉乘。斯圖加特的 STORM 系統是 20 年前就開始建立的系統,其中 公車資訊系統可顯示轉乘資訊,停車轉乘者可以使用之停車票搭乘捷運及公車運輸系 統,政府並有補貼。 在效益評估方面,歐洲都會區交通控制系統已經運作超過 30 年,已經證明可以減 少延滯、提昇車速及減少旅行時間。另一方面達到減少能源消耗降低空氣污染。英國的 SCOOT 系統及義大利的 UTOPIA 系統已經被確認在減少車輛之延滯方面符合成本效 益。法國的 PRODYN 系統使平均車速增加 10%~20%。德國 MOTION 系統使得旅行時 間平均減少 10%,最多的時候減少 20%。 高速公路管理系統方 面 ,法國巴黎地區在 整個 Peripherique 路 段及 Boulevard 至 Marechaux 路段使用匝道儀控及 350 個資訊可變標誌之控制策略,平均車速分別增加 21%、16%及 19%。荷蘭的阿姆斯特丹實施匝道儀控系統後使得因為匝道車流匯入而造 成的延滯減少 19%。 (3)日本先進交通管理系統發展
日本於 1995 年 8 月由建設省(The Ministry of Construction, MOC)、警察廳(The National Police Agency, NPA)、通產省(The Ministry of International Trade and Industry, MITI)、運輸省(The Ministry of Transport, MOT)及郵政省(The Ministry of Posts and Telecommunications, MPT)等五個政府單位,以政府的基本政策對先進資訊電信系統 (Advanced Information & Telecommunications System 簡稱 AITS)的認知為導向,共同製定 在道路、交通與車輛的資訊網路發展層面所需要的綱領,其主要的觀點可為下列三大方 向:
‧基本觀念 -ITS 的定義與含意 -政府將明顯指示增進資訊網路的能力 ‧推展措施 -目標:在 21 世紀初期大致完成推展 -措施:明顯指出 11 項獎勵措施 ‧發展項目與進行中的計畫 -發展項目:明顯指出 9 項發展項目 -發展計畫:在五個政府單位掌握下的發展計畫已正在進行中 ATMS 在日本扮演的主要角色涵括:減少許多交通事故、紓解道路壅塞及空氣污 染。這個建構展現了典型的交通管理系統的組態與功能特色,並且指出了它的推展和未 來的展望。
通用交通管理系統(Universal Traffic Management System,簡稱 UTMS)計畫為日本的 ITS 計畫,藉由整合性交通控制系統和紅外線車輛偵測器的運用,以雙向通訊於車輛與 基礎建設之間為基礎。先進行動資訊系統(Advanced Mobile Information System, 簡稱 AMIS)是 UTMS 的核心子系統,此一系統提供駕駛人道路交通資訊,例如壅塞地點、通 行時間及其它在路網上的事件資料,以使駕駛人避開都市交通事故地點,這其中主要的 關鍵在於若能將車上顯示系統、號誌控制及資訊可變標誌等均能得到充分的使用運作效 果,將使得路網內的交通流量呈現理想的狀況。 日本較具先進交通管理功能的系統主要仍是以交通控制系統為主,其中較具規模者 為大阪市交通控制系統,此系統於 1980 年完成,系統之交通資料來源有:超音波偵測 器、公車偵測器、攝影機、直升機、巡邏車、執勤交通警員等,形成多元空間以提供足 夠交通資訊至控制中心,讓電腦根據各地特色選擇最佳號誌控制策略。設置多座資訊可 變板為本系統一項特色,但如果交通控制人員覺得電腦所選擇的顯示內容並不妥當,也 可在中心直接下命令更改可變標誌板之內容,以疏導交通。 在效益評估方面,日本警察廳在 1996 年有一個改善交通安全設施的計畫,主要的 目的是預防交通事故及促進交通順暢。在評估分析中證實裝設更多的交通號誌及交通號 誌由電腦控制是有效的。新裝設交通號誌可以減少 75%的交通事故,交通號誌若由電腦 依據交通密度來控制可以減少 78%的交通事故。在東京都會區交通控制系統的評估顯示 減少延滯及停等時間的效益相當於 7.5 倍的建置成本。東京地區一個新的號誌控制系統
STREAM 在 308 個重要路口的執行成效顯示白天(7AM 至 7PM)旅行時間減少 9%,總延 滯時間減少 23%。 (4)我國先進交通管理系統發展 目前國內對於智慧型運輸系統之研究仍屬萌芽階段,在過去的發展中最值得重視的 是運輸研究所於民國 81 年 7 月所公佈的「智慧型車路系統之研究與引進綱要計畫」,在 該計畫中將我國發展 IVHS 所應努力的方向、項目及時序,均作了概略之規劃。早期因 無專責機構整合僅各機構零星研究,直到近期方由交通部責成科技顧問室成立 ITS 小 組,負責統合規劃推動。民國 87 年 7 月已由產、官、學界發起成立中華智慧型運輸系 統協會(ITS-Taiwan)為日後國內推動相關智慧型運輸系統計畫開創了良好的基礎。國內 先進交通管理系統起步雖較歐、美、日等國晚,過去仍有零星研究計畫,相關領域略述 如下。 台灣目前已有高速公路交控系統、都市電腦號誌控制系統、事件自動偵測及匝道儀 控等設施實地運作,其它尚有於規劃研發階段之技術如電子收費、動態交通號誌系統、 自動車輛辨識及行車路線導引系統等。 正當國內起步發展智慧型運輸系統的時候,除了健全高快速公路和都市道路的交通 控制系統以外,在大眾運輸管理系統方面,政府應鼓勵業者設置相關系統,使未來先進 交通管理系統運作起來不僅完備,也更具效益。因此必須積極的整合與發展國內先進交 通管理系統,而未來更可進一步的將資訊、技術與 ITS 其它的基礎建設相關計畫結合, 以大幅地增加運輸效率,促進行車安全,全面提昇國內交通運輸的品質。 目前國內在先進交通管理系統已使用之技術包括: A.高速公路交通控制系統 綜合原中山高交控系統,納入北二高路段,以及配合中山高汐止至五股高架道路興建成 立汐五高架交控系統,並加入事件自動偵測功能,使北部區域高速公路交控系統整體運 作更加完善。 B.都市電腦化交通號誌控制系統 目前運作中之系統包括台南市的 COMDYCS -Ⅰ、-Ⅱ、-Ⅲ系統,台中市及基隆市的 TRUST 系統,以及台北市電腦化交通號誌系統。 C.事件自動偵測 目前中山高速公路與北部第二高速公路均未採行事件自動偵測,而汐止、五股高架段中 山高交控系統,則已將此項系統技術設計及運作在內。
D.主線/匝道儀控 中山高速公路交控系統原先並未將此項功能納入,但北二高交控系統則已將此項系統技 術予以納入。目前正著手中山高全線匝道儀控自動化的系統建構與開發,已在民國 87 年 8 月開始實施。 而目前正在研究中之系統技術包括: A.都市動態交通號誌系統 目前運作中的電腦號誌系統係分屬於定時、動態查表、動態計算及適應性號誌等,但目 前適應性號誌的使用僅限於獨立路口的運作,故未來這方面主要係著重在幹道及網路之 適應性號誌的研究。成功大學亦有在進行研發動態交通號誌系統這方面的技術。 B.行車路線導引系統 此方面的系統技術尚未成熟,大部分的研究仍在實驗室中進行。目前成功大學及中央大 學亦在進行此項技術的研發工作。 C.自動車輛辨識 關於自動車輛辨識系統部分,有國內公司曾於民國 79 年在中山高速公路泰山收費站進 行直接車牌辨識技術之測試。同年,交通部科技顧問室與國內研發單位亦曾進行單向式 電子車牌辨識系統之測試工作。交通大學及大同公司曾經亦有進行自動車輛辨識方面的 研發技術。 D.電子自動收費系統 在電子自動收費系統方面,國內學術單位(如交通大學)有進行雙向式電子自動收費車上 系統雛型之實驗室測試工作。民國 86 年 10 月交通部裁示未來高速公路電子自動收費系 統使用紅外線(infrared)作為車上單元與車道系統之間的通訊方式,預計民國 87 年 11 月 中旬開始試辦。 2.技術發展的比較與成熟度評估 A.通訊傳輸 (A)國外概況
a.擬定出一個有關於 ITS 的標準共通運輸通訊協定,如美國的 NTCIP,定義出了一個傳 送共通訊息與使用可調變接近方式的架構,每一個遵照 NTCIP 運作的設備將能夠與其 它亦遵照 NTCIP 運作的設備互相通訊。
b.光纖電纜使用同步光纖網路(Synchronous Optical Network,簡稱 SONET)或同步數位階 層(Synchronous Digital Hierachy, 簡稱 SDH)標準,支援融合資料、語音和影像的技術在
一個單一骨幹下傳送資訊。在美國蒙哥馬利郡的馬里蘭運輸管理系統及科羅拉多州丹佛 市的 Mavix Solution 系統均使用 SONET 傳輸媒介。
c.閉路電視的影像畫面轉換成壓縮的數位化資料,利用 ATM 技術在 SONET 或 SDH 標 準網路上大約 2Mbps 頻寬將資料送到交通管理中心的監視器上顯示,亦可包裝成 TCP/IP 格式傳送到工作站上執行數位顯示。 d.語音被轉換成數位訊號”0”或”1”的數值,各語音與控制訊號在各載波站間以數位訊號 方式傳輸。 e.行動無線電通訊技術被快速使用於個別式系統雙向式通訊,如行車導引、車隊管理、 危機處理救援服務等。 (B)國內概況 a.目前交通控制系統主要是透過數據專線、Ethernet、X.25、FDDI、ISDN、HDLC 等傳 輸媒介與交控中心通訊。 b.資料、語音與影像皆透過其各自獨立的傳輸系統與控制中心進行通訊傳輸運作,目前 新設計已利用 SONET/SDH 標準網路融合資料、語音與影像三者在一個單一骨幹下傳送 資訊,此種技術目前已成為商業標準化產品,其技術成熟度已被認可,目前高速公路之 未來整體光纖骨幹已由中華顧問工程司規劃設計。而其它市區內無光纖佈設,可考慮由 民間公司投資佈設光纖電纜,而回饋其有線電視台播放即時路況的權力,但目前法規尚 未開放,必須政府修法通過方為可行的作法。 c.目前仍未有類似 NTCIP 的標準架構,但高速公路交控系統之通訊協定架構在系統規 劃、設計及開發方面,已儘量朝著共通性與標準化的方向為原則,未來具體可行的方式 仍待政府出面主導統合通訊協定標準的決策。運研所於民國 86 年完成之「電腦化交通 號誌控制系統-通訊系統手冊與通訊協定」研究計畫,可以做為未來國內交控系統之通 訊協定傳輸參考標準。同時參考北美 NTCIP 協訂之網路架構及功能物件導向建置開放 標準的 ITS 通訊協訂。 d.在無線電通訊方面,目前有國科會無線通訊群體計畫、軍民通用科技、科技顧問會議 (SRB)及其它的技術研究單位正積極進行相關技術與產品開發計畫。展頻通訊(Spread Spectrum)已被應用在循環式雙向通訊定位系統上,運輸研究所「台北市示範性公車動態 資訊顯示系統」即是運用此最新技術,將系統定位結合頻道資訊傳遞功能將系統運作可 行性確實的展現。而在無線數據通訊方面,運輸研究所「高速公路路況與台汽車輛定位 即時資訊系統」亦是利用此最新技術應用在系統發展上,此項技術亦展現了其在國內適
用的可行性。 e.交通部已在民國 86 年陸續開放各項電信業務,在民國 86 年底公告開放行動數據及中 繼式無線電兩項業務,民國 87 年 7 月正式啟用,這是結合無線通訊與資訊服務,在同 一個通訊平台上,不同業者可以針對不同市場需求開發出多樣化的各種加值服務,適合 應用於智慧型車路系統的資料無線傳輸及發佈。 B.定位技術 (A)國外概況 a.全球衛星定位技術(GPS) (a)美國軍方為了發展作戰部隊及載具定位,在地球上空發放了二十四顆衛星,不停的送 出衛星軌道資料,地面 GPS 接收器接收其訊號,可推算出所在位置之立體座標。 (b)GPS 定位最好需要收到 4 顆衛星資料。 (c)一般 GPS 精確度在 50~100 公尺。 (d)GPS 目前核心技術仍以美國為首,日本及歐洲以應用為主。 b.紅外線 Beacon 定位通訊技術 (a)利用設置於路口或路側之短距離紅外線通訊方式,得知車輛位置的技術。 (b)此定位技術可同時達到車輛辨識及與中心通訊交換資訊之效果。 (c)由於此技術層次較低,各國均有能力自行研製發展。 (d)除了車上必須具備紅外線通訊設備外道路沿線必須配置紅外線通訊設備。 (e)具有定向性。 (B)國內概況 a.全球衛星定位技術 (a)國內具備 GPS 代工生產製造(OEM)的能力 (b)國內學術研究單位及測量科學研究單位正大力推廣及發展應用 GPS,如救護車定位追 縱系統及公車定位系統的研發與測試。另有廠商已自日本引進全套之小客車電子地圖配 合 GPS 定位之系統,此 GPS 在國內已為具體可行之技術,如台汽公司在中山高全線 50 輛營運車輛裝置定位系統,以及新竹市公路結合 GPS 與 GIS-T 之應用技術之動態資訊 系統,均為國內 GPS 實作的範例。 b.紅外線 Beacon 定位通訊技術 國內具備紅外線通訊技術能力已有各種遙控及較大容量通訊傳輸之設計製造能力,目前 仍未實際應用於路側通訊之發展,其技術上的缺點如:易受遮蔽及受天候影響較大(雨、
霧、塵),正是國內交通與氣候環境上的常態,故必須審慎考量其技術的適用性。 C.電子地圖
(A)國外概況
在技術發展及產品商業化上最成熟者,首推日本(據文獻資料領先歐美發展五年),其 特點為:
a.1988 年由建設省(MOC) 支持成立「日本數值地圖協會」(JDRMA),並邀集 82 家全國 汽車、電子器材及測量公司等廠商集資組成。 b.1989 年出版之 1/25,000 基本電子地圖(主要道路),1990 年版已包含次要道路,並預 計至 1998 年提供全國數位路網圖。 c.各廠商取得授權之基本電子地圖後,可依應用需要增強功能(如用作車行定位、行車 導引及車隊管理等),成為具商業價值之電子地圖。 d.具有資料建置經濟快速與終端產品功能特色各異之特點。 (B)國內概況 a.國內電子地圖之發展,以運研所委託學術機構製作 1/25,000 圖為主,測繪時間為民國 80 年~82 年 9 月,另外在使用 1/5,000 內政部數值圖的部份,測繪時間為民國 77 年~ 82 年。運研所亦將內政部所建國土資訊系統基本地形圖部分試行建置道路動線資訊。 b.省公路局在民國 85 年使用 GPS 將北部地區省縣道路做了修正整理;逢甲大學亦將北、 中、南部都會區域建置了最新的電子地圖。 c.國內民間業者已引進國外軟硬體技術,並將北市縣部份區域(約 13 平方公里)建置電子 地圖。 d.目前國內關於電子地圖之生產、長期維護、標準格式及使用授權等規範均未建立。可 行性的作法為短期內需要由政府主管單位製訂作業標準,適時提供地圖及交通資訊在未 來國內任何代理廠商產品均能接續使用,由廠商製作再由民間加值業者提供相關所需應 用服務。 3.國外先進交通管理系統之經驗實例 A.美國馬里蘭州蒙哥馬利郡運輸管理系統
馬里蘭州蒙哥馬利郡運輸管理系統(Montgomery County, Maryland - Transportation Management System)提供交通偵測、即時控制和資訊的功能給蒙哥馬利郡公路路網,該 郡鼓勵與支持各管轄單位之間或其本身內部間的運輸管理計畫之協調運作。本系統提供 技術工具來發展一個有效率及廣泛的運輸管理計畫,它主要強調的是與各種管轄單位、
媒體及社會大眾進行資訊共享。 本系統以開放架構允許新的技術能夠融入系統運作為其特色,其主要組成元素中某些部 份包括: (A)有 1500 座號誌先進交通感應式交通號誌控制(目前有六百餘座號誌可與中心電腦連 線控制)。 (B)可顯示行車路線導引控制的資訊可變標誌(在 1995/96 年期間在控制區域內進行測 試)。 (C)200 座攝影機具有影像偵測系統功能(在 1995 年以前有 16 座可操作,在 1995 年底計 畫將 60 座納入運作,而每年計畫將 30-50 座逐年加入系統運作)。 (D)有 3000 座偵測器具多種用途的監測功能(在 1995/96 年間計畫設置 1000 座環路線圈, 機器設備與其它偵測技術所需版本目前正在測試中)。 (E)符合即時情況的地理資訊系統(GIS)。 自動運輸資訊系統包括:
-旅行服務無線電台(Travelers Advisory Radio, 簡稱 TARS) -該郡內有線電視台第 55 號頻道播放即時交通運輸狀況 -直接與電視廣播台連線 -與交通資訊服務公民營單位間進行協調運作及共享資訊 -連接網際網路(在 1995/96 年期間發展出) -電話語音辨識運輸資訊系統(在 1995/96 年期間製作發展出) -公共場所資訊查詢站(Kiosk)(在 1995/96 年期間製作發展出) -整合大眾運輸與交通控制的運作及管理(在 1995 年測試,1996 年底正式發展)。 -以 GPS 為基礎的自動車輛定位系統(正在加強運作中)。 -空中偵測計畫包括從不同的管轄代理單位回應直接的協調指揮能力,並且具有可以從 直昇機將即時影像傳送到運輸管理中心的功能。 -自動的將警察局/消防局的電腦輔助派遣系統納入整合(在 1995 年開始運作)。 -自動的支援相關運輸計畫(正在加強運作中)。 蒙哥馬利郡已經從提供電腦號誌系統和先進交通管理系統的通訊需求中建構了一 個通訊系統,此系統包括了雙絞線和光纖電纜,光纖電纜使用同步光學網路(Synchronous Optical Network, 簡稱 SONET)標準支援資料、聲音和影像的傳輸需求。目前已在郡內針 對所有政府單位、公立學校及大專院校間支援其設置光纖網路。
該郡運輸計畫主要的成功關鍵在於不同的管轄單位之間已經能夠協調運作和共同合 作,這些單位包括警察、消防、救援、環境清潔及運輸規劃等,不論是聯邦政府、州級 政府、或是地方政府的層級,都是經由先進交通管理系統的功能發揮強化作用達到協調 運作的效果。 蒙哥馬利郡有一個提供重要資訊給運輸系統內使用者的延伸計畫,即時而正確的資 訊以不同的格式分散在公民營管轄單位、大眾媒體及私人資訊公司之間,系統內的運作 人員和使用者將可利用到這些資訊。 運輸管理系統有另外一個重要的方向,即是將大眾運輸管理和交通管理做一個整合 協調。運輸管理中心內將有交通和大眾運輸的人員駐留,這些人員將共享一個中央系統 以便更有效率處理運輸管理事務。利用先進的技術如衛星定位系統(GPS)來監視郡內公 車的動態位置,同時可自動調整交通號誌,以執行公車優先通行給那些時刻延滯的公車 趕上行程,在該郡的 250 號公車已在 1996 年底發展完成了自動車輛定位的功能。 先進交通管理系統主要的重點亦在於該郡的運輸事件管理計畫。經由系統的控制、 監視及資訊蒐集的功能,事件能夠迅速被偵測得到,進而作出反應處理及狀況調適,以 期儘可能安全地而有效率地將事故排除。電腦號誌系統和直昇機偵測計畫已經證明是處 理事件行動的重要工具,偵測器技術的功能加強將更進一步改進事件偵測的效果。 該郡亦實行先進交通管理系統功能來管理特殊事件,以減低道路封閉和高交通流量 時造成的衝擊。 B.美國西雅圖用路人廣域資訊系統
西雅圖用路人廣域資訊系統(Seattle Wide-area Information for Travelers,簡稱 SWIFT)是一 個先進旅行者資訊系統(ATIS)運作測試計畫,在 1994 年期間在西雅圖開始推動發展。計 畫的組織成員包括:
-Delco Electronics Corporation(General Motors Corp.subsidiary) -ETAK, Inc.
-Federal Highway Administration(FHWA) -International Business Machines(IBM) -King County Dept. of Metropolitan Services -Metro Traffic Control
-Seiko Communications Systems, Inc. -University of Washington
-Washington State Department of Transportation 西雅圖用路人廣域資訊計畫提供一個具有 ATIS 特性能力給西雅圖大都會地區的用路 人,透過高速率資料(FM-副載波段無線電)系統與裝設有 FM-副載波段通訊頻道的接收 設備做連結通訊,這些設備將可接收不同的用路人資訊型態,包括交通報導服務、個人 旅遊資訊服務、大眾運輸目前運行位置與時刻表及其它相關資訊。接收設備目前正在測 試中的有:
-Delco radio receivers -IBM portable computers -Seiko Message Watch (TM)
可攜式個人電腦設備可以接收到目前交通資訊的地圖顯示、公車位置與時刻表及共乘資 訊,但是該計畫其餘的設備並不具備有此項功能。
與 SWIFT 有關的資料將由華盛頓大學(Univ. of Washington)不同的組織進行處理(平滑、 整合、融合與格式化),被收集的資料型態有高速公路環路線圈感應資訊、共乘資訊、 交通最新報導、事件、預定排訂事宜、公車位置與時刻表、個人旅遊資訊服務訊息及不 同的 GPS 資料等。這些處理過的資料將被格式化後放置於訊息框架內提供資訊傳送至 適當的接收裝備裡。 無 線 電 傳 送 系 統 提 供 了 結 合 即 早 的 錯 誤 修 正 資 料 和 資 料 多 重 性 傳 送 (Multiple Transmission),以便增加廣大地區接收資料修正的可能性。系統基本上的傳輸速率為每 秒 19,200bits,經過 錯誤修正 的處理 過程 ,使得有 用的資 訊傳 輸速率大 約為每秒 8,000bits。如果最終的實際資料包括資料多重性傳送的話,傳輸速率將更低。訊息可在 個人系統中透過一組普通的收發設備傳送至個別的定址(Addressed),或者以群組方式定 址送達。
計畫中接往測試使用者包括總共 700 個設備,即 500 個 SEIKO Message Watches(TM)、 100 個 Delco radios 和 100 個 IBM portable computer,評審委員會亦發展出一個評審計畫 來評估允許使用者參與測試行列的時機。
C.德國斯圖加特區域運輸管理系統
此為斯圖加特 20 年前即開始陸續建構的交通管理系統。斯圖加特區域運輸管理系統 (Stutgart Transport Operation by Regional Management, 簡稱 STORM)提供了整個當地的 交通問題實際的解決方式,提出了一些現代交通管理和通訊技術,並且從實際系統運作 中獲得了經驗。
STORM 的管理中心從市區和週邊區域週期性的更新 6 項 STORM 的系統分為是旅遊資 訊與訂位系統、個人行車導引系統、停車轉乘動態資訊系統、大眾運輸接駁資訊系統、 車隊管理控制系統和緊急呼叫系統。其整體系統架構示意圖如圖一所示。 (A)旅遊資訊與訂位系統 用路人可以在家裡和辦公室透過電子數據線和 STORM 管理中心連線即可獲得資訊,另 外在斯圖加特主要街道、道路服務中心及貿易中心都設置有查詢終端機,甚至在車上都 可獲得旅遊資訊。 警察 ST 交通電腦中心 STORM 服務電腦 STORM 交通電腦 輕軌捷運 營運控制中心 ST 捷運系統 營運控制中心 交通控制中心 Ludwigsburg RDS/ TMC 資訊可 變標誌 空氣污 染測站 感應 線圈 Beacons 個人路徑導引系統 地區交 通電腦 停車導 引系統 停車轉 乘設施 停車轉乘動態資訊系統 轉乘站 大眾運輸接駁資訊系統 旅遊資訊與訂位系統 訂位 服務 即時 公告欄 服務 貨運 公司 車隊管理控制系統 (緊急呼車輛 叫系統) 數據 服務 民營層次 公營層次 緊急救援呼叫系統 圖 3.5 斯圖加特 STORM 系統架構示意圖 (B)個人行車導引系統 有兩種模式:
中心 DMRG Unit 進行雙向通訊傳遞。 b.數位化無線電廣播模式 RDS/TMC mode:車內 CD-ROM 已有內建電子地圖,從 RDS/TMC 接收最新訊息後,DMRG Unit 經過理想的路徑計算,結合顯示出路徑導引。 (C)資訊停車轉乘動態系統 提供用路人前往地點有無大眾運輸系統及前往班次時間、停車場空間資訊及前方道路壅 塞情況,以便讓用路人決定以何種工具到達目的地。 (D)大眾運輸接駁資訊系統 透過電子時刻表系統將公車、地鐵、捷運、快速鐵路資訊納入系統,提供給乘客參考欲 前往地點的大眾運輸資訊。 (E)車隊管理控制系統 透過衛星定位將車輛目前位置傳入派遣中心,中心再接收由 STORM Center 傳來的交通 資訊,研判由路網上支派那輛車較有效益,再經由 Mobile Radio Services 傳送到該車輛 執行派遣任務。 (F)緊急救援呼叫系統 透過衛星定位將待救援車輛透過其自動緊急救援呼叫設備,由車輛無線電服務傳送到 STORM Center,再由中心即刻派遣救援作業前往救援車輛。 D.韓國果川市智慧型運輸系統示範計畫 韓國政府為了展現推動智慧型運輸系統(ITS)的決心,特別選擇了位於漢城南方的果 川市(Kwachon),進行韓國國內第一個整合的 ITS 示範建置計畫。本示範計畫由韓國運 輸協會(KOTI)自 1995 年 11 月開始進行,為期 7 個月,負責主導計畫之策劃及推動。接 著,韓國電信運輸部(MOCT)贊助 25 萬美元,協助 KOTI 建立本示範計畫的綱要計畫。 同時間韓國電信運輸部(MOCT)、果川市市政府及國家警察局共同投資 420 萬美元,作 為系統軟、硬體的建置與整合使用。韓國本地的 8 家企業公司也投入系統軟、硬體的開 發工作,參加的廠商在計畫開始的第一年共投入 700 萬美元資金。這是韓國第一個經由 公私部門合作發展的 ITS 計畫,整體計畫的推動過程如圖 3.6 所示。 1995.11~1996.5 計畫成立及策劃 1996.6~1996.10 綱要計畫及 細部設計 1996.12~1997.12 系統建構及 研究 1997.10~1998.10 運作檢測及 評估效益 1998.10~1999.10 營運、完工及後續 擴充系統規劃 圖 3.6 果川市 ITS 示範計畫之推動過程
果川市的 ITS 管理中心位於市政府大樓內,約佔樓地板面積 500 平方公尺,主要任 務為整合該市智慧型運輸計畫及各子系統的運作。中心區分為 3 個隔間,分別為主控室、 子系統室及設備機房三部分。目前有 8 個不同的子系統運作,分別為先進交通管理系統 (ATMS)的交通號誌控制系統、電子自動收費系統及自動執法系統;先進交通資訊系統 (ATIS)的動態行車路線導引系統、停車資訊系統及即時路況播報系統;先進大眾運輸系 統(APTS)的公車資訊系統;以及商業車輛運作系統(CVO)的動態地磅系統(WIM)。果川 市整體示範計畫之系統建置如圖 3.7 所示。茲將此 8 個子系統分別介紹如下: ATMS 交通號誌控制系統 電子自動收費系統 自動取締系統 ATIS 動態行車路線 導引系統 停車資訊系統 即時播報系統 CVO 動態地磅系統 APTS 公車資訊系統 果川市 ITS 中心 圖 3.7 果川市 ITS 示範計畫之系統建置 (A)交通號誌控制系統 本系統主要由號誌控制器(14 座)、車輛偵測器(159 個環路式及 13 個影像式)、閉路電視 (3 座)及資訊可變標誌(2 座)組成。由車輛偵測器蒐集交通車流資料,作為即時號誌時制 控制的依據。閉路電視設置於主要路段,作為監視車輛流量的用途。資訊可變標誌設置 於重要道路的路側,可顯示道路壅塞、事件地點及速率限制等訊息。本系統的主要效益 在於經由即時號誌時制的控制,達到增加行車速率及紓解交通壅塞的目的。 (B)電子自動收費系統 本系統建置於儀旺市-果川市間快速道路之收費站上,雙向各一車道開放不停車收費。 利用自動車輛辨識(AVI)技術,感應車內之識別卡(tag),以執行電子自動收費。本系統的
主要效益,在於利用自動收費紓解道路壅塞,及降低收費人員的行政成本。 (C)自動執法系統 本系統在市區易超速肇事地點裝設 4 座測速攝影機,當測速器偵測到超速車輛,即拍攝 違規車輛的車牌號碼,並由系統即刻列印違規罰單。罰單內容有違規時間、地點、車速 及車前牌照號碼的證據照片,可以郵寄方式逕向違規車輛所有人告發。本系統的主要效 益在於減少處理超速違規的時間,並能夠進行全自動的違規取締作業。 (D)動態行車路線導引系統 本系統利用市區 8 輛裝設 GPS 的實驗車(Probe Vehicles),其中 3 輛為小汽車, 5 輛為公 車,在每天特定時段管理中心可追蹤車輛的位置,透過無線電傳輸車輛亦可接收由中心 傳來的路段壅塞及事件資訊。本系統主要是作為無線傳輸資料網路及車上顯示系統的測 試計畫,其效益為減少旅行時間及紓解道路壅塞。 (E)停車資訊系統 在市區內 6 個停車場前方 2 至 3 公里處之主要街道,設置資訊可變標誌,提供駕駛人目 前停車場尚有停車位數的相關訊息。停車資訊的傳送路徑,為各停車場將偵測到的停車 空位傳送到 ITS 中心,再由中心將停車空位訊息傳送到資訊可變標誌即時顯示。本系統 的主要效益在於減少駕駛人找尋停車位花費的時間並降低道路壅塞。 (F)即時播報系統 本系統的設施位置目前仍在評估中,主要是透過一個全彩的 3×5 公尺大螢幕,顯示道路 下游包括行車速率及排隊長度的交通資訊,以指引駕駛人改變行車路徑或改乘其他交通 工具。本系統的主要效益在於駕駛人可以依據顯示的訊息,改變行駛路線或改搭其它交 通工具。 (G)公車資訊系統 本系統在市區內選定 7 個公車站牌設置查詢台(kiosk),乘客可查詢目前公車的位置和預 定到達的時間。這是利用 GPS 及 Beacon 定位技術發展的系統,主要用來提供公車的到 站時間訊息,其中有兩個公車站牌接近捷運站的出口,亦可達到大眾運輸轉乘的效用。 (H)動態地磅系統 果川市鄰近的儀旺市為貨車集散中心,由於超載的貨車行駛在高快速公路上,會造成了 許多道路交通管理的問題。因此,果川市受到各方的支持,要求進行動態地磅系統的測 試。本系統設置於儀旺市-果川市間之快速道路上,主要的效益為防止超載的車輛損壞 路面與發生事故,並可減少貨車誤點情形,提高貨車之機動性。
有關各先進交通管理系統之主要相似之功能,分析整理成一比較表,如表一所示。 表 3.1 經驗實例之交通管理系統之主要相似功能分析比較表 管理系統 主要功能 休 士 頓 運 輸 及 危 機 管 理 中心 馬 里 蘭 州 域 控 制 中 心 亞 特 蘭 大 先 進 交 通 管 理 系統 馬 里 蘭 州 蒙 哥 馬 利 郡 運 輸 管 理 系 統 德 州 聖 安 東 尼 奧 先 進 交 通 管 理 系 統 西 雅 圖 用 路 人 廣 域 資 訊 系統 慕 尼 黑 都 會 地 區 運 輸 合 作 管 理 系 統 斯 圖 加 特 地 區 運 輸 控 制 管 理 系統 果 川 市 智 慧 型 運 輸 系 統 示 範 計畫 號誌控制 ● ● ● ● ● ● ● ● 高 速 公 路 控 制 ● ● ● ● ● ● ● ● 事件管理 ● ● ● ● ● ● ● ● ● 緊 急 救 援 管 理 ● ● ● ● 停車管理 ● ● ● 大 眾 運 輸 管 理 ● ● ● ● ● ● ● 車隊管理 ● ● ● 匝道儀控 ● ● 旅行資訊 ● ● ● ● ● ● ● ● ● 結合 GPS ● ● ● ● 註:本計劃僅就表中有”結合 GPS”功能之系統進行分析說明 (三) 車載裝置系統 在此以行車紀錄器車載裝置做說明: 1.行車紀錄器之發展 行車紀錄器是一種安裝於車上之設備,用來記錄車輛行駛中的所有情況,較常安裝 於遊覽車、校車、交通車、公車、貨車與交通調查車等大型車輛中。Tachograph 於 1925 年在德國被發明,所謂的 Tachograph 是從德文的 Tachometer(回轉速度器)及 Graphik (紀錄)兩個字組合而成,也就是我們現在所稱之行車紀錄器。其最初的主要功能在於 紀錄駕駛員的出車時間,怕駕駛員疲勞開車,以及車輛過度運轉而產生意外。
根據歐洲實施的經驗,行車紀錄器最初被引進時,因為具有監視駕駛員的功能,所 以造成駕駛員及工會的反彈,駕駛員將它戲稱為「車上的間諜(the spy in the cad)」,普 遍對其存有抗拒的心態,然而近年來駕駛員心態有重大的改變,因為公路貨運市場的競 爭激烈,再加上許多公營客貨運公司民營化後,駕駛員的工作時數往往超過法令上限, 造成行車安全性降低,故大家將行車紀錄器視為改善工作環境的利器。 世界各國對於安裝行車紀錄器法令不儘相同,歐洲早在 1970 年就明文法律規定, 所有大型車輛皆需安裝行車紀錄器,而數位式行車紀錄器的觀念於 1984 年被提出,歐 盟更於 2004 年 8 月立法規定,所有新的商用車輛皆需裝設數位式行車紀錄器。日本方 面,也於昭和 37 年(1962 年)立法規定,租用巴士、超過 100 公里之車輛貨物車輛運 送事業、最大載重量 5 噸以上之貨車、全國 15 都市的出租車輛、計程車皆需安裝行車 紀錄器。而我國開始使用行車紀錄器則是在民國 59 年由日本引進國內,並於民國 80 年 代後期陸續引進數位式行車紀錄器,但因為國內許多業者對於行車安全與車隊管理的觀 念較為不足,在節省營運成本的情況下,往往不重視裝設行車紀錄器所帶來的效益,使 得車輛紀錄器在國內推動不易,故我國政府便於民國 88 年規定 20 噸以上新車需裝設行 車紀錄器,並於民國 90 年將範圍擴大至 8 噸以上新車,自此以後,行車紀錄器才普遍 裝設於大型客貨運車輛之中。由於業者的成本考量,且政府法令並沒有規定行車紀錄器 的種類,故目前車輛裝設的行車紀錄器都以傳統機械式的為主,只有少數廠商使用數位 式行車紀錄器。 現在世界各國使用行車紀錄器情形各有不同,在歐洲國家,主要安裝於巴士、重型 貨車及緊急救援車輛;在日本,主要安裝於租用巴士、八噸以上的貨車、以及部分地區 的出租車輛和計程車;在台灣,主要安裝於國道客運、部份客運業者、台北市聯營公車 及重型車輛。 行車紀錄器依其記錄與顯示資料方式之不同,可分為傳統機械式行車紀錄器與數位 式行車紀錄器兩種,分別介紹如下: (1)機械式行車紀錄器
傳統機械式行車紀錄器是紀錄行駛中的狀況,它是利用刻針與圓形紀錄紙卡做紀 錄,事後再以人工或光學的方式進行判讀。其圓形紀錄紙卡記錄項目如下: A.速度的記錄:主要是紀錄下車輛行駛中的所有速度變化,可以瞭解駕駛員是否有按交 通速限來行駛,可當駕駛員違規的一種證明。 B.駕駛員的交替紀錄:由於每台車的紀錄紙卡只有一張,但駕駛員每個人皆擁有ㄧ把鎖 匙,故使用不同的鎖匙開車,都會顯現在紀錄紙卡上,方可供業者了解車輛的使用及交 換班情形。 C.行走距離紀錄:此紀錄了車輛所行走之公里數,一個山坡代表 10 公里,可供業者在 規劃路線或排班使用。 D.引擎震動紀錄:主要記錄下車輛在某段時間內的引擎變動狀況,觀察在上班時間其引 擎是否為靜止的,如此便可得知員工是否有偷懶或翹班的情形,提供給業者ㄧ種稽查的 功能。 機械式行車紀錄器雖然可以提供給業者許多有用的資訊,但在長久使用之下,發現 了許多問題,例如:有時候駕駛員未依速限行駛,發生超速的情形,但為了逃避業者的 處罰,駕駛員經常會自行更換圓形紀錄紙卡;圓形紀錄紙卡是利用轉軸帶動刻針刻畫出 線條,精確度較低;圓形紀錄紙卡則是以刻針刻畫出線條,其有時會發生甩針或是卡紙, 造成重複刻畫的情形;圓形紀錄紙卡事後判讀工作,有時是利用人工的方式判讀,但往 往會因為刻畫太過密集,導致無法用肉眼判斷……等缺點。而由於機械式行車紀錄器的 問題層出不窮,使得業者們動盡腦筋催促著數位行車紀錄器的誕生。
圖3.8 機械式行車記錄器圓形行車記錄紙卡 資料來源:樺崎實業有限公司 (2)數位式行車紀錄器 數位式行車紀錄器主要是針對機械式行車紀錄器的缺點改良而成的。數位式行車紀 錄器將車輛上各種裝置的所有運行狀況,經由類比或數位式訊號傳至行車紀錄器,並將 其數位化後再加以儲存。數位式行車紀錄器較機械式行車紀錄器具有資料傳輸與管理之 方便性,並可減少人工誤判,同時兼具擴充性、整合性及依不同需求紀錄不同組合資料 等多項優點。各廠牌之數位式行車紀錄器皆有不同的功能,亦可依不同的需求而加入不 同的功能,例如:駕駛員資料、車燈及車門使用狀況、冷藏凍車的車上溫度……等等。 以下為依據交通部運研所數位式行車紀錄器功能技術規範建立與示範應用之研究〔29〕 行走距離記錄:車輛行走 距離記錄 1 山 10 公里 速度記錄:時刻記錄 車輛行駛速度記錄 駕駛員交替記錄
及整理國內外數位式行車紀錄器之製造廠商網站,彙整出之國內外的數位式行車紀錄 器。
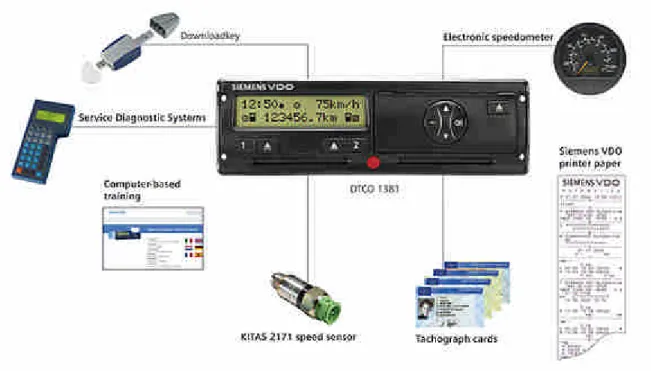
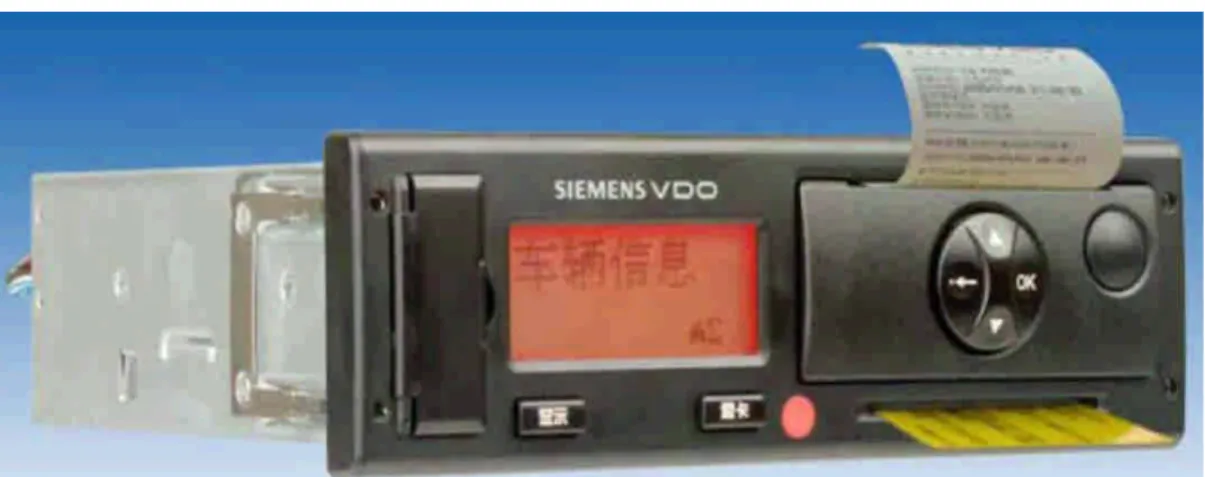
A.德國 Siemens VDO 公司之 DTCO1381 數位式行車紀錄器
Siemens VDO 公司長久以來即生產機械式行車紀錄器,因應數位式行車紀錄器的需 求,Siemens VDO 公司生產一套符合歐盟最新規範的數位式行車紀錄器-DTCO1381, DTCO1381 之大小與車上收音機相同,包括兩個 IC 卡讀卡機、列印機、螢幕、時鐘、 操作控制及資料儲存之設備等,能夠紀錄駕駛工作狀態、行駛速率與距離、相關參數, 如引擎轉速、車輛操作紀錄等。
圖 3.9 德國 Siemens VDO 公司之 DTCO1381 數位式行車紀錄器 資料來源: 德國 Siemens VDO 公司
B.澳洲 Circuitlink 公司之 Tacholink Millenium 數位式行車紀錄器
澳洲 Circuitlink 公司所生產的數位式行車紀錄器是利用記憶卡匣來儲存資料,安裝 在儀表板上方以利駕駛員查看,所記錄資料包括速率、引擎轉速、急煞車、急加速、停 車時間、怠速時間、駕駛時間、行駛距離、事故資料等,並可選擇輸入包括喇叭、車門 開關、水箱溫度、方向燈、車燈、油耗、載重等類比或數位式資料,分析軟體所產生的
報告為主要活動報告、異常駕駛行為報告、總旅次、每日總報告、每週總報告、每日駕 駛報告等。
圖 3.10 澳洲 Circuitlink 公司之 Tacholink Millenium 數位行車紀錄器 資料來源:澳洲 Circuitlink 公司
C.日本鈴木(ISUZU)公司之 MBCD 數位式行車紀錄器
日本鈴木(ISUZU)公司之 MBCD(Mobil Business Computer Digital Tachograph) 是一套以數位式行車紀錄器為主題,結合 GPS 與 GIS 的車隊管理系統,該系統能夠紀 錄的資訊分為兩類: (a)作業資訊:裝卸貨物、車窗開關、待機、加油、休憩、路檢、洗車等。 (b)行車資訊:車速、急加減速、時間、距離、位置、引擎轉速、高速或ㄧ般道路行 駛、貨倉溫度等。 MBCD 主體為數位式行車紀錄器。MBCD 系統能夠提供國土交通省所指定之三種 紀錄,包含車速、行駛時間及距離,並能夠提供許多在車隊管理上有用的報表,如運轉 每日與每月報表、違反規定一覽表、安全管理總表等。
圖 3.11 MBCD 數位式行車紀錄器 資料來源:日本 MBCD WEB 而以下為國內數位式行車紀錄器 A.寶錄股份有限公司之 BR-6822 之數位式行車紀錄器: (a)數位行車紀錄器:紀錄行駛之重要資訊,包括有速度、平均速度、加速度、轉速、 方向角、時間、里程數、煞車、大燈、方向燈、引擎溫度等。 (b)資料蒐集:數位行車紀錄器上的資料透過隨身碟傳給資料處理分析電腦系統。 (c)處理分析電腦系統:駕駛員只要將行車資料隨身碟接上電腦,系統即自動分析行 車數據並上傳至後台系統。車隊管理員每天下班後接收到由系統自動發出的車隊 的營運報表電子郵件。其主要功能在彙整、分析並管理車隊所有車輛之行車紀錄, 以提供管理者重要數據及駕駛績效考核之參考。 圖 3.12 寶錄股份有限公司之 BR-6822 數位行車紀錄器
資料來源: 寶錄股份有限公司 B.彙通科技股份有限公司之 ODR2002數位行車紀錄器: (a)數位行車紀錄器:紀錄行駛之重要資訊,包括有速度、霧燈、平均速度、冷氣、 轉速、方向角、時間、煞車、大燈、方向燈、引擎溫度等。 (b)資料蒐集:數位行車紀錄器上的資料透過 USB 連接埠經 PDA 連線傳給資料處理 分析電腦系統。 (c)處理分析電腦系統:讀取數位式行車紀錄器之資料後,會自動處理分析車隊行車 狀況,例如:車輛超速與否、班車營運狀況……等等,具有車輛維護管理、車輛 肇事分析、駕駛行為管理、車輛服務水準分析等相關分析,供相關營運管理單位 使用。 C.康訊科技股份有限公司之偵航家 3010 數位行車紀錄器: (a)數位行車紀錄器:紀錄行駛之重要資訊,包括有位置、時間、速度及 GPS 經度及 緯度信號……等等。 (b)資料蒐集:可經由 RS232 介面下載至個人電腦或筆記型電腦。 (c)處理分析電腦系統:可經由無線數據回報到控制中心。為便於監控中心追蹤行車 動態紀錄,偵航家 3010 及 3020 使用可即時顯示行車路徑於地圖上的軟體,提供 業者做為車輛監控、派遣管理及緊急救援等用途。
圖 3.13 康訊科技股份有限公司之偵航家 3010 數位行車紀錄器 資料來源: 康訊科技股份有限公司 D.樺崎實業股份有限公司所代理的 SIEMENS VDO 的 VDR 3202 數位行車紀錄器: (a)數位行車紀錄器:紀錄行駛之重要資訊,包括有駕駛員和乘車人員的駕駛、工作、 暫停/休息數據、已行駛的速度和里程訊息數據,以及其他與車輛相關的工作過程 和事件數據。 (b)資料蒐集:可經由 RS232 介面下載至個人電腦或筆記型電腦。 (c)處理分析電腦系統:SIEMENS VDO 系列的數位行車紀錄器亦可搭配該公司所研 發之後端資料庫管理軟體,進行駕駛員管理、車輛維護管理、車隊調度管理等方 面之管理,其所輸出資料格式為標準 SQL 資料庫格式,方便在資料庫分析處理, 在 VDR 3202 更可進ㄧ步搭配 OFFICE 文書處理軟體進行分析。 圖 3.14 樺崎實業股份有限公司所代理的 SIEMENS VDO 的 VDR 3202 數位行車紀錄器 資料來源: 樺崎實業股份有限公司 表 3.2 國內外數位式行車紀錄器比較表 數位行車紀錄器 紀錄功能 資料蒐集 可否運用 GPS 德國 Siemens VDO 公 司 之 DTCO1381 數位式行車紀錄器 設備基本資料、IC 卡插入及抽出 資料、駕駛活動資料、車輛使用 資料、里程表資料、速度資料 IC 卡(Company Card) 可 澳洲 Circuitlink 公司 Tacholink Millenium 數位行車紀錄器 速率、引擎轉速、急煞車、急加 速、停車時間、怠速時間、駕駛 時間、行駛距離、事故資料 記憶卡匣 可
日本鈴木(ISUZU) 公司之 MBCD 數位 式行車紀錄器 裝卸貨物、車窗開關、待機、加 油、車速、急加減速、時間、距 離、位置、引擎轉速等 記憶卡 可 寶錄股份有限公司 之 BR-6822 之數位 行車紀錄器 速度、平均速度、加速度、轉速、 方向角、時間、里程數、煞車、 大燈、方向燈、引擎溫度 隨身碟 可 彙 通 科 技 股 份 有 限 公司之 ODR2002 數 位行車紀錄器 速度、霧燈、平均速度、冷氣、 轉速、方向角、時間、煞車、大 燈、方向燈 PDA 可 康 訊 科 技 股 份 有 限 公司之偵航家 3010 數位行車紀錄器 位置、時間、速度及 GPS 經度及 緯度信號 RS232 介面下 載 可 樺 崎 實 業 股 份 有 限 公 司 所 代 理 的 SIEMENS VDO 的 VDR 3202 數位行車 紀錄器 駕駛員和乘車人員的駕駛、工 作、暫停/休息數據、已行駛的速 度和里程訊息數據,以及其他與 車輛相關的工作過程和事件數 據 RS232 介面下 載 可 資料來源:本研究整理 在交通部運研所數位式行車紀錄器功能技術規範建立與示範應用之研究〔29〕中, 也針對機械式行車紀錄器和數位式行車紀錄器各方面做一個比較,如下表所示: 表 3.3 傳統行車紀錄器與數位式行車紀錄器的各項比較 項目 傳統(機械式)行車紀錄器 數位式行車紀錄器 輸入訊號 類比式訊號 數位式及類比式訊號 運作單元 機械零組件 微處理器 操作 使用特殊耗材且須每日更換、每日 填寫基本資料,並需正確安裝 無需特殊耗材,人員操作即可 自動紀錄全程行車資料 表 3.3 傳統行車紀錄器與數位式行車紀錄器的各項比較(續) 紀錄媒介 紀錄紙 電子式記憶體 項目 傳統(機械式)行車紀錄器 數位式行車紀錄器 紀錄內容 以連續圓形紀錄行車的時間、速率 及里程 除 可 紀 錄 行 車 的 時 間 與 速 率 外,尚可記錄多種行車資訊 資料判讀與存取 需要專業人員及專業設備判讀,取 得資料較不精密,填寫報表耗力費 時,易生錯誤 透過有線或無線數據傳輸或儲 存卡可迅速讀取或儲存複製, 並可以長期保存資料;使用者 經由軟體分析運算篩選資料, 節省人力,避免誤判
肇事鑑定輔助 需求高 需求高 經營管理應用 普通 較優 功能擴充性 擴充彈性較小、較麻煩 可連接不同訊號來源以因應不 同的運輸或營運管理需求 附加價值 無法符合資訊化的趨勢整合有效 的資料供各管理單位運用 資料可經由電腦分析轉換或各 種經營管理之重要依據 價格 較便宜 較昂貴 資料來源:交通部運研所數位式行車紀錄器功能技術規範建立與示範應用之研究〔29〕
第四章 研究方法
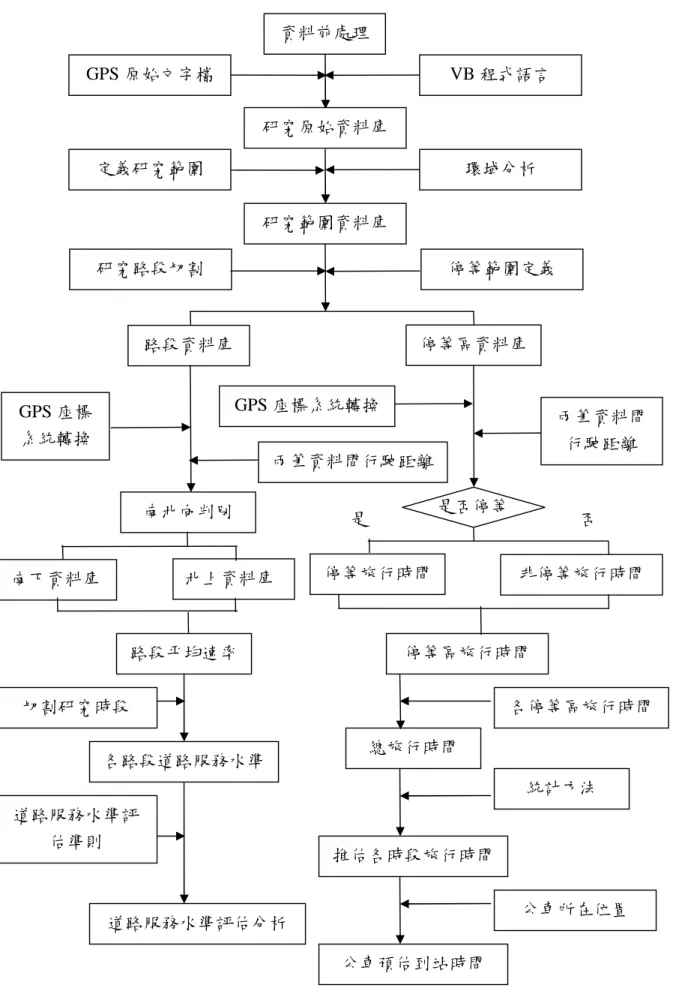
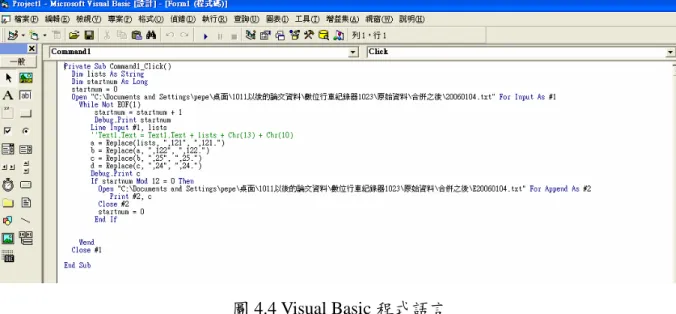
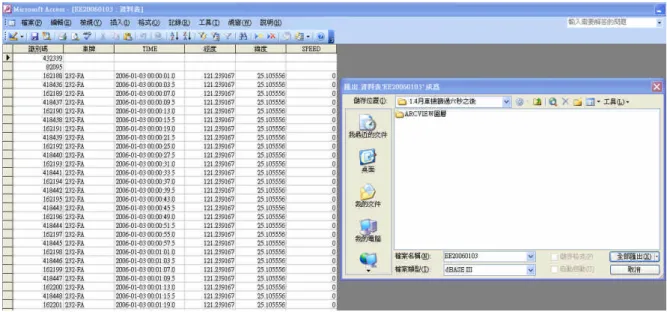
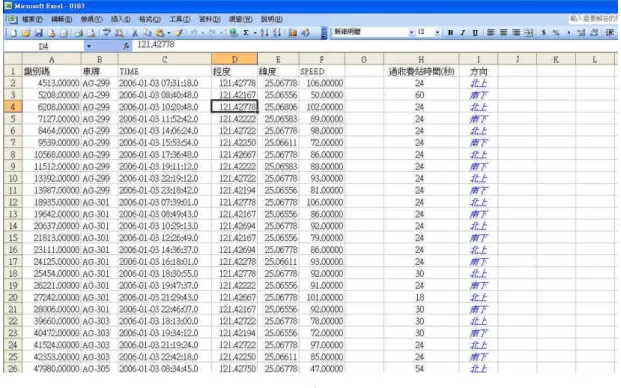
本研究主要是運用探針車輛實際地在研究路段上運行,並且利用GPS及GPRS等技 術將其行駛的時空資料回傳至監控中心,後續則透過許多不同的工具及處理手法進行資 料的處理與分析。為此,本研究先行在前三章確定研究問題並敘述研究目的,接著回顧 相關的研究文獻;在文獻的探討中,可知許多的研究多以模擬程式產生所需之交通資 料,或使用少許的真實資料進行模擬預測;在少許的真實資料方面,研究者多使用人工 記錄方式或者自行開車測試而獲得驗證所需之資料。然而在本研究中,則完全採取由探 針車所紀錄之真實資料,藉由大量的歷史資料,其所能夠解讀之資訊,相信並不是少許 資料或以人工記錄方式所獲得之資料可以比擬的。 本研究已規劃一套適用的資料處理流程(如圖4.1),主要包含最初的資料轉換、整 併、設計VB程式語言、定義研究時間及範圍、切割路段及定義停等範圍、空間分析以 及使用統計分析等,除將資料建構成一個資訊庫外,並利用該資訊庫推估道路服務水 準、預測路段旅行時間以及推估公車到站時間等。以下詳敘本研究中所使用之研究方法 及資料處理之流程。圖 4.1 資料處理流程圖 資料前處理 GPS 原始文字檔 VB 程式語言 研究原始資料庫 路段資料庫 停等區資料庫 研究路段切割 環域分析 定義研究範圍 研究範圍資料庫 停等範圍定義 GPS 座標 系統轉換 兩筆資料間行駛距離 GPS 座標系統轉換 兩筆資料間 行駛距離 路段平均速率 停等區旅行時間 總旅行時間 各路段道路服務水準 各停等區旅行時間 停等旅行時間 非停等旅行時間 是 否 切割研究時段 推估各時段旅行時間 統計方法 公車預估到站時間 公車所在位置 南北向判別 南下資料庫 北上資料庫 是否停等 道路服務水準評 估準則 道路服務水準評估分析
1.資料探勘方法 資料經由相關之處理程序後,即可針對研究目的選取適用之資料探勘方法,資料探 勘可使用之技術或方法相當多,如線性迴歸、邏輯斯迴歸、類神經網路、決策樹、群集 分析或是關聯規則等,本研究以決策樹方法進行車載即時交通資訊作業資料庫程式之實 證,內容包括資料收集、資訊分析以及資訊應用等項目。且進行車載即時交通資訊作業 資料庫程式之應用,內容包括大眾運輸(例如:市區公路到站時間預估)、交通管理(例如: 服務水準評估資訊提供或旅行時間預測)以及用路資訊等項目。並提出相關管理對策。 (1)決策樹
Han & Kamber 指出現今決策樹的演算法大致有 C5.0、CART、CHAID 與 QUEST 這 四種演算法。CHAID 演算法的目的主要是在每次分割時利用卡方檢定(chi-square test) 來計算節點中類別的 p-value,以 p-value 大小來決定決策樹是否繼續生長,所以不需要 再做修剪樹的動作,CHAID 的一個問題是它無法處理連續型資料,在本研究的資料庫 中存在著許多連續型數值的資料,所以並不適用在我們的研究中。CART(Classification and Regression Trees )演算法是一個二元(binary)分割的方法,應用於資料屬性為連 續型的資料型態,每次分割將資料分為兩個子集合,以 gini index 評估資料的分散程度, 作為選擇分割條件的依據。本研究採用以亂度(Entropy)為基礎之決策樹,為 Quinlan 所 開發的決策樹演算法 ID3(Iterative Dichotomiser 3, C5.0/C4.5 的前身)。C4.5 是 Quinlan 改善他自己所發展出來的 ID3 演算法,C4.5 與 ID3 最大的不同就是 C4.5 改進了 ID3 不 能處理連續型數值的問題,所以 C4.5 可以算是 ID3 的後續版本。他以資訊增益 (Information Gains)作為分岔準則,但是發現應用在實際案例上時,資訊增益會偏好選擇 選項數較多的變數作為多,且容易造成過度學習的效應。為了改善這項系統偏誤,Quinlan 重新定義出「增益比值(Gain Ratio)」的計算公式來取代原有的分岔準則,但無論是哪個 版本,最根本的內容還是透過所謂亂度(Entropy)的概念作為決策樹的分岔準則。以下便 為 ID3 資訊獲利計算方式加以說明。假設我們有一個資料組,有兩個類別標籤A跟B, a 為類別A的個數,b為類別B的個數,對一個給定的資料組所需要的期望資訊 I (A,B) 的計算公式如下: I(A,B)= b a b b a b b a a b a a log2 log2 (12) 接著計算每個屬性的熵值(entropy),以屬性C來說,a 代表屬性i C中類別A被劃
分的子集個數, b 代表屬性i C中類別B被劃分的子集個數,所以根據由C劃分成子集 的熵值或期望值由下式算出: 樣本分類所需的期望資訊: E(C)= ( , ) 1 i i v i i i b a I b a b a