大華技術學院
機電工程研究所
碩士論文
車輛轉向系統之連續及離散時間
控制器設計研究
研 究 生:張 剛 維
指導教授:謝 劍 書 博 士
中華民國九十八年七月
摘要
本論文針對車輛轉向系統在鞍節分歧點(saddle-node bifurcation point)上所產生之系統鞍節點分歧現象,提出一有效的連續時間及離散 時間控制器設計方法,以消除或延遲此一系統不穩定現象。車輛轉向 系統為一多點平衡系統:當系統轉向角度愈大時,系統的鞍點與(穩 定)平衡點愈靠近,當轉向角度到達鞍節分歧點時,此時相鄰的鞍點 與平衡點將消失,而當超出此一分歧點後,系統將沒有一穩定的平衡 點;此時車輛轉向系統的狀態將來回震盪或發散 ,因而可能導致車輛 翻覆。針對此一車輛轉向系統之鞍節點分歧現象 ,非線性控制方法中 之輸入-狀態回授線性化控制(Input-state feedback linearization) 被證明 能有效的消除或延遲此一系統不穩定現象 。本論文之目的即在延續此 一非線性控制設計,更進一步提出其一線性非時變控制模型,以降低 回授線性化控制所需之複雜計算度。利用最佳化控制理論,我們可以 求得此一線性非時變控制之最佳固定增益值 (optimal fixed-gain)。另 外,我們亦嘗試設計一針對車輛轉向系統控制之離散時間控制方法 , 以因應現今較實際之數位控制器 設計需求。最後,我們利用數值模擬 驗證本論文所提出之連續時間及離散時間控制器設計方法 之有效性。誌謝
終於走到了論文完成的這一刻,也完成了人生的一個里程 碑, 在中間努力的這段日子 ,有歡笑有鬱悶,這些都將是我美好的回 憶。曾經因論文一籌莫展而煩腦,為了論文進度落後而擔心,也有 從論文中學到了許多解決問題的方法及道理而滿足,這其中的種種 情緒,在這最後一刻,都成為我邁向下一步的動力!十分感謝指導 教授謝劍書博士,在這段期間讓我能從多方面學習,並耐心的指導 我,在論文無法突破、進度落後時,適時地給予指導,解決無法突 破之處,有您的耐心與教導,讓這篇論文順利的完成。其次感謝口 試委員廖德誠博士、梁耀文博士及田麗文博士撥冗參與口試並給予 本論文指正與建議,使本論文更臻完善。再者感謝何世偉老師、林 明漢老師、王惠蓉老師,讓我在做人處事上學習了很多,他們對學 生們的照顧,也讓我在研究生的路程變的更豐富。還有感謝我的父 母與弟弟,要不是您們在包容與物質上的全力支持,我也無法全力 的完成論文,謝謝你們!宜吟,這幾年妳也付出很多,在我心情不 好的時後轉移我的注意分享我的感受 ,寒、暑假都大老遠的來陪 我。最後是學校我的同學,宗漢、智鈞、建岷、建宗以及學弟們, 謝謝你們,有你們這些朋友真好!目錄
中文摘要
...I誌謝
... ..II目錄
... III表目錄
... ...V圖目錄
...VI第一章 簡介
... ...1 1.1 動機... ...1 1.2 大綱... ...3第二章 基礎理論介紹
...42.1 輸入-狀態回授線性化(Input-state feedback linearization) ...4
2.2 四 階 朗 基 - 庫 塔 數 值 模 擬 方 法 (Fourth-order Runge-Kutta method) ... ...7
第三章 車輛轉向系統橫向動力學模型與 分歧現象分析
...8 3.1 車輛橫向動力學模型...8 3.2 車輛轉向系統鞍節點分歧現象分析 ...11第四章 車輛轉向系統連續時間控制器設計
……...………24 4.1 線性化模型...25 4.2 非時變回授線性化控制器設計 ...26第五章 車輛轉向系統離散時間控制器設計
…...31 5.1 時變離散時間控制器設計...31 5.2 非時變離散時間控制器設計...32第六章 模擬與驗證
...48 6.1 輸入-狀態回授線性化控制器控制成效之數值模擬 ...34 6.2 非時變回授線性化控制器控制成效之數值模擬 ...38 6.3 最佳線性平方控制器控制成效之數值模擬 ...43 6.4 離散回授線性化控制器控制成效之數值模擬 ...44第七章 結論與未來研究方向
...49參考文獻
……… ...………..…..51附錄 A 線性化模型微分值計算補充
………...……..……53附錄 B 低摩擦力路面之穩定平衡點與鞍點之詳細數據表
...55附錄 C 模擬驗證用 MATLAB 程式
...61 C.1 程式設計流程圖...61 C.2 MATLAB 程式設計...63表目錄
表 3.1 高、低摩擦力路面參數表………...…14 表 3.2 系統平衡點特性表………. ...…14 表 3.3 不同速度下的最大安全轉向角度範圍 ………..15 表 3.4 不同車重下車子的最大安全轉向角度範圍………..…...…15 表 6.1 時變與非時變離散回授線性化控制效能比較…...….46圖目錄
圖 3.1 車輛轉向動力學方塊圖………...……….……..10 圖 3.2 等效轉向力特性圖……… .…...10 圖 3.3 系統在速度v25
m/s 、輸入f 0下之相位描繪圖…...16 圖 3.4(a) 以鞍點 b 為平衡點所生成線性化系統之相位描繪圖……….16 圖 3.4(b) 以鞍點 c 為平衡點所生成線性化系統之相位描繪圖 ……….17 圖 3.5(a) v25m/s,f 0.0113系統響應圖………...………17 圖 3.5(b) v 25m/s,f 0.0114系統響應圖………...……..……...17 圖 3.6 系統狀態軌跡圖(低摩擦力路面)…..………...…..…...18 圖 3.7 系統分歧點圖……… ...…...19 圖 3.8 系統分歧點特性………....……....……….19 圖 3.9 v25m/s之分歧圖…………....………...20 圖 3.10 各速度下之分歧圖....………...………21 圖 3.11 v10~40
m/s
下轉向角之穩定範圍………...…….…21 圖 3.12 v25m/s下高低摩擦力路面之分歧圖……...22 圖 3.13 相同輸入下,高低摩擦力路面與 之比較圖….…...………...23 圖 3.14 高低摩擦力路面之最大安全轉向角度範圍比較圖…...23 圖 6.1 無施加控制情況下系統發散現象……...37圖 6.2 加入回授線性化控制
k1,k2
0.5,0.5
後系統收斂…...37 圖 6.3 加入回授線性化控制
k1,k2
10,0.5
後系統收斂……...…37 圖 6.4 加入回授線性化控制
k1,k2
0.5,2.5
後系統收斂…...38 圖 6.5 加入回授線性化控制
k1,k2
10,2.5
後系統收斂…...38 圖 6.6
K1,K2
2.5,1.0
與
k1,k2
0.5,0.5
之控制效果比較…...41 圖 6.7
K1,K2
10.,1.0
與
k1,k2
10.0.5
之控制效果比較…...41 圖 6.8
K1,K2
2.5,5.0
與
k1,k2
0.5,2.5
之控制效果比較……....42 圖 6.9
K1,K2
10.,5.0
與
k1,k2
10.,2.5
之控制效果比較…...42 圖 6.10 *
0.3774,0.9787
K 與
k1,k2
12.4,8.9
之控制效果比較…44 圖 6.11 LQR 與時變離散回授線性化控制之控制效果比較(Ts 0.5)…47 圖 6.12 LQR 與時變離散回授線性化控制之控制效果比較(Ts 0.05)...47 圖 6.13 LQR 與非時變離散回授線性化控制之控制效果比較(Ts 0.5)48 圖 6.14 LQR 與非時變離散回授線性化控制之控制效果比較 (Ts 0.05)... 48第 一 章
簡介
1.1 動機
近年來,車輛轉向動力學及其相關控制研究已經成為學術界熱門 研究方向之一(請參考文獻[1-6])。而在車輛轉向動力學研究中,最受矚 目之一則為安全駕駛的問題 ,最常見的就是高速過彎時所造成的不穩 定現象。由於每天都有大量的交通事故發生 ,所以探討過彎時前輪轉 向角和車輛動力學的非線性反應間的關聯 性,變成了一項很重要的研 究議題。 分歧理論(bifurcation theory)能有效的應用在非線性車輛動力學之 系統穩定性分析[3,7]。其中文獻[7]提出車輛轉向系統的不穩定現象來 自於系統發生了鞍節點分歧現象,並推導出鞍節點分歧發生的條件, 同時利用 auto 軟體可計算出在不同車輛參數下的鞍 節點,並繪製出相 對應的分歧圖,由此證實了鞍節點分歧確為造成車輛不穩定的原因 , 同時也證明了相平面分析在非線性系統穩定性分析上的有效性 。文獻 [14]則利用相平面分析軟體PPLANE7(軟體可由網路自由取得)來分析 車輛轉向系統之穩定性,並藉由分析的過程,幫助初次接觸車輛轉向系統控制的人更進一步地了解車輛轉向系統的非線性特性 。利用此一 分析,亦可得到[7]中同樣之結果。
輸入-狀態回授線性化控制(input-state feedback linearization)[8]已 經被成功的應用在許多解決非線性控制問題上[9]-[12],利用輸入狀態 的回授,消除了系統的非線性部分。在文獻[9]中,Ha 等人應用回授線 性化的技術來調整引擎的輸出扭矩 ,成功地達到了想要的車輛縱向加 速度。在文獻[12]中,Liaw 等人成功的應用回授線性化技術消除車輛 轉向系統的非線性部分,穩定了在分歧點上的系統,也因此避開或延 遲了系統不穩定現象的發生。文獻[13]對車輛系統之轉向分析與控制設 計有非常深入的探討及詳細的說明 , 文獻[14]嘗試將文獻[13]中的回授線性化控制器簡單以歐拉前進時 間差分法所推導出之離散化方式改寫,利用改寫後所得到的離散回授 線性化控制器來控制車輛轉向系統。然而其控制效果不甚理想 :離散 回授線性化控制器在低速及極小的取樣時間下 ,可以達到我們想要的 控制需求;而在高速及較大的取樣時間下 ,則無法達到我們想要的控 制目的。 本論文延續文獻[14]中之研究結果,嘗試設計針對車輛轉向系統控 制之一較有效離散時間控制方法,以因應現今較實際之數位控制器設 計需求。另外,本論文亦延續文獻[12,13]中回授線性化控制方法,更
進一步提出其一線性非時變控制模型 ,以降低回授線性化控制所需之 複雜計算度。利用最佳化控制理論,我們可以求得此一線性非時變控 制之最佳固定增益值(optimal fixed-gain)。
1.2 大綱
本論文架構如下所述。第一章為本論文的動機及一些相關的文獻 探討。第二章介紹相關基礎理論:輸入-狀態回授線性化控制方法,最佳 化控制理論,取樣理論,及四階 Runge-Kutta 非線性數值模擬技巧。第 三章介紹本論文探討之車輛轉向系統模型及回顧其在鞍點分歧點上所 產生之系統鞍節點分歧現象 ,據以說明本論文所探討之控制問題 。為 能後續驗證本論文所提出控制方法之有效性 ,本章將提供車輛系統在 不同重量、速度、初始條件(外擾)、路面摩擦力下之最大安全輸入範 圍。第四章提出基於輸入-狀態回授線性化控制方法之一線性非時變控 制模型,以降低回授線性化控制所需之複雜計算度。另外,將說明如 何利用最佳化控制理論,來求出此一線性非時變控制之最佳固定增益 值。第五章提出一針對車輛轉向系統控制之離散時間控制方法 ,以因 應現今較實際之數位控制器設計需求 。第六章將以數值模擬驗證本論 文所提出之連續時間及離散時間控制器 之控制效能。最後,在第七章 中提出本論文的結論及未來可能的後續研究方向。第 二 章
基礎理論介紹
本章對本論文中所用到的輸入-狀態回授線性化控制方法 及撰寫 模擬程式需使用到的四階朗基-庫塔數值模擬方法等相關基礎理論加以 介紹與說明。首先在 2.1 節中介紹本論文所採用的控制方法:輸入-狀態 回授線性化控制。其次,在 2.2 節中我們介紹四階朗基-庫塔數值模擬 方法之基本原理。2.1 輸入-狀態回授線性化(Input-state feedback linearization)
假設有一仿射-型式(affine-type)非線性系統如下:
x g xu, f x (2.2) 其 中 u 及 f :Dx n 和 p n x D g: 在 Dx n 域 都 充 分 平 滑(sufficiently smooth) 。如果存在一個 diffeomorphism n x D T: 使得
x z T D D 包含原點且非線性映射zT
x 將系統(2.2)轉換成下式:
1 x u x
. B Az z (2.3) 其中,
A,B
具可控制性,和為純量函數,且對所有的xDx而言,
x 為非奇異解。定義zT
x ,我們可得 x x T z ,將(2.2)式代入可得下式:
f x g xu
. x T x x T z (2.4) 比較(2.3)及(2.4)式可得:
x AT
x B
x, f x T (2.5a)
x B 1
x. g x T (2.5b) 將矩陣A及B設為下面控制標準型: , 0 0 0 1 0 0 1 0 0 0 0 1 0 n n A , 1 0 0 0 1 n B (2.6) 我們可將(2.5)式中之右式分別表示如下:
, 1 3 2 n n x x T x T x T x B x AT
, / 1 0 0 0 1 1 n x x B (2.7) 其中,
T
T n T T x T x T x T x T 1 2 。 將(2.5)及(2.7)代入(2.4),我們可得下式:
u x g x T x g x T x g x T x g x T x f x T x f x T x f x T x f x T u x g x f x T x x T n n n n n n 1 1 2 1 1 1 2 1 (2.8a)
u x T x T x T n 3 2 0 0 0 (2.8b)比較(2.8a)與(2.8b)式,我們可得到下面關係式:
x T
x f x T i i 1 ,i1,2,,n1, (2.9a)
x
x , f x Tn (2.9b)
0 x g x Ti ,i1,2,,n1, (2.9c)
1 0. x x g x Tn (2.9d) 利用(2.9b)與(2.9d)式,我們可分別得到及的函式如下:
x Tn/x
f x, (2.10a)
. / 1 x g x T x n (2.10b) 利用(2.9a)與(2.9c)式,我們可選擇適當的 T(x)函式(本論文在 4.2 節中 將針對車輛轉向系統詳述如何求取此一 T(x)函式)。選擇控制器輸出u 為狀態回授控制,其控制律定義如下:
x
x K T
x
, u (2.11) 其中K為常數增益。利用關係 z=T(x),我們可將(2.11)式改寫如下:
x
x Kz
. u (2.12) 將(2.12)式代入(2.3)式,我們可得下面線性系統:
A BK
z. z (2.13) 因此,經由(2.3)~(2.13)式的回授線性化程序,我們可將原本的非線性 系統(2.2)式轉變成一線性系統模型(2.13)式。2.2 四階朗基-庫塔數值模擬方法 (Fourth-order Runge-Kutta method) 四階朗基-庫塔法為模擬中最常被使用來解一微分方程之數值解, 通稱「RK4」或者就是「朗基-庫塔法」。考慮下面初值問題:
t,y, y
t0 y0. f dt dy (2.14) 則下一個值
yn1 是由現在值
yn 加上時間間隔
h 和一個平均斜率的乘 積來決定,其數值計算如下:
4 3 2 1 4 3 2 1 1 2 2 6 1 2 2 1 2 2 k k k k h y k k k k h y yn n n (2.15) 其中平均斜率是由以下斜率的加權平均所得:k1是初始斜率,k2是時間 段中點的斜率(採用斜率k1來決定 y 在點 2 h tn 的值),k3也是中點的斜 率(但是這次採用斜率k2決定 y 值),k4是時間段終點的斜率(其 y 值 用k3決定),此四種斜率之計算分別表示如下 :
tn yn
f k1 , (2.16) 1 2 2 , 2 k h y h t f k n n (2.17) 2 3 2 , 2 k h y h t f k n n (2.18)
3
4 f t h,y hk k n n (2.19) 若將上面斜率k2、k3、k4省略,則(2.15)式將簡化為下面歐拉前進時間 差分公式:
n n
n n n y h k y hf t y y 1 1 , (2.20)第三章
車輛轉向系統橫向動力學模型與 分歧現象分析
在本章中,我們針對車輛轉向系統之橫向動力學模型分析其穩定 性,並探討在何種條件下,系統會發生側滑角與偏移率持續震盪或發 散的不穩定現象 。3.1 節介紹本論文所採用的車輛橫向動力學模型 [12]。3.2 節中,我們利用相平面分析軟體來解釋車輛轉向系統之鞍節 點分歧現象,並探討其系統穩定性,最後利用分析結果來討論一些參 數對車輛轉向控制的影響。3.1 車輛橫向動力學模型
本論文考慮一個典型的車輛轉向動力學數學模型 [12,13],其轉向 動力學方塊圖如圖 3.1 所示。在圖 3.1 中,v是縱向加速度,f為前輪 轉向角,是側滑角,是偏移率,CG為車輛重心,Lf和Lr分別為重 心和前後輪軸的間距,m是車輛的重量,IZ是 z 軸的搖擺力矩,Fyfl、 yfl F 、Fyfr、Fyrr分別為左前、左後、右前、右後輪轉向力;Fxfl、Fxfl、Fxfr、 xrr F 分別為左前、左後、右前、右後輪牽引力,Fyfl加Fyfr等於總前輪轉 向力Fyf ;Fyrl 加Fyrr等於總後輪轉向力Fyr;Fxfl加Fxfr等於總前輪牽引力 xf F ;Fxrl加Fxrr等於總後輪牽引力Fxr。若忽略滾動動作,轉向動力學方程 式如下式(3.1)~(3.3):
v v
Fxf Fxr Fyf sin f, m (3.1)
Fyf Fyr Fxf sin f, mv (3.2)
f yf r yr
cos f xf sin f. z L F L F L F I (3.3) 在此我們考慮Fxf 0及車輛在無縱向加減速的條件下,且不探討轉 向角f 對速度v造成的影響,則(3.1)式在橫向動力學分析上可以被忽 略。綜合以上所述,在
Fxf 0,Fxr 0
條件下,並假定車輛行駛在固定 速度v下,我們可將(3.1)~(3.3)式簡化如下:
, 1 Fyf Fyr mv (3.4)
cos , 1 f yf r yr z F L F L I (3.5) 其中,Fyf和Fyr是、和f的函數,稱為轉向力估測參數。在車輛轉 向系統的模擬上,我們採用轉向力跟側滑角、自回正力矩跟側滑角、 煞車跟滑移等關係可以符合實驗用輪胎測得數據之魔術法則[2],做為 轉向力估測模型,其數學式如下(3.6)所示(其等效轉向力特性如圖 3.2 所示):
tan 1 tan
, sin f 1 f f f f 1 f f f yf D C B E E B F
tan 1 tan
, sin r 1 r r r r 1 r r r yr D C B E E B F (3.6) 其中,f及r分別為前後輪的滑角,其數學式可分別表示如下: , cos tan 1 f f f v L , cos tan1 v Lf r (3.7)其中,Bf、Cf、Df 、Ef、Br、Cr、Dr、Er皆為常數。通常Df 及Dr是 負數,Bf、Cf 、Br、Cr則皆為正數。 圖 3.1 車輛轉向動力學方塊圖 圖 3.2 等效轉向力特性圖 xfl F xrl F yrl F xrl F yrr F xrr F xfr F yfr F r L Lf
Slip angle ,f r(rad)
轉 向 力 yf F, yr F (N ) yf F (高摩擦力路面) yr F (高摩擦力路面) yf F (低摩擦力路面) yr F (低摩擦力路面)
3.2 車輛轉向系統鞍節點分歧現象 分析
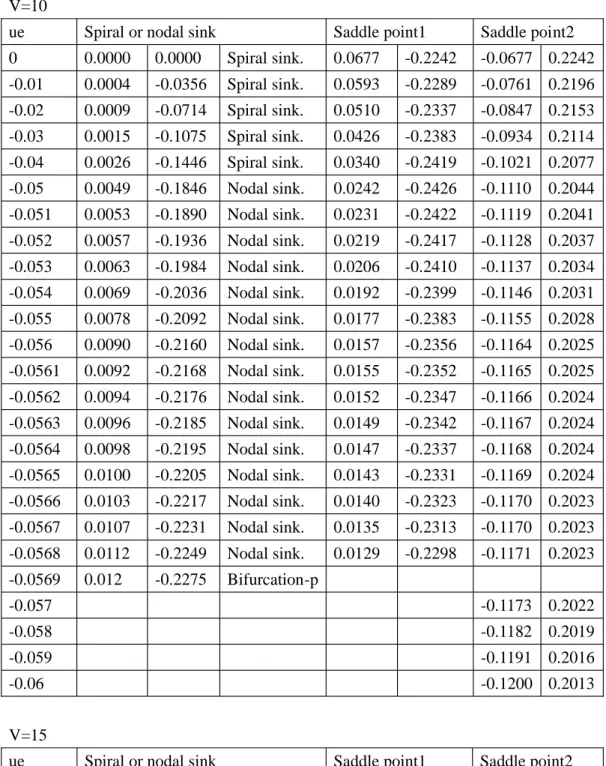
由於本論文考慮之車輛系統模型為二階非線性系統,因此可透過 相平面分析(以數值模擬的方式),進行系統平衡點穩定度的分析,並 研究在一些不同的狀況下(如速度不同、車重不同…),系統平衡點及 最大安全轉向角度範圍的變化。這裡的最大安全轉向範圍指的是在 相 平面分析軟體上,逐漸增加輸入(轉向角度)數值(增加到最大正數值 或是遞減至最小負數值),仍不致造成系統在分析軟體上找不到穩定平 衡點之所有輸入轉向角度所含括的範圍。下面我們將針對 pplane7 相平 面分析軟體針對系統 (3.4)-(3.5)做相平面分析,模擬使用的參數如表 3.1。(關於 pplane7 軟體操作,請參考文獻[14]之說明) 首先,我們利用 pplane7 軟體,當系統(3.4)-(3.5)在速度v25
m/s , 輸 入f 0 下 , 所 得 到 的 相 位 描 繪 圖 如 圖 3.3 所 示 , 其 中 座 標 (x1,x2)=
, 。我們將(x1,x2)範圍限制在(x1,x2)=(1,1)內,可找出系統 有三組平衡點:a(0.000, 0.000)、b(-0.0497, 0.0969)、c(0.0497, -0.0969), 其中 a 點稱為 Spiral sink,b 及 c 點為 Saddle point。以此三點為平衡點 所求得之系統特徵值如表 3.2 中所示,其中系統在 a 點上特徵值為複數 特徵值,其實數部分為負數,所以 a 點為穩定螺旋點;b 及 c 點的特徵 值為相異符號的實數,所以 b 及 c 點為鞍點。不接近 b、c 點且落入 b、c 點穩定流型內,系統的平衡點將趨近 a 點。 另外,以 b 及 c 點為平衡點所求得線性化系統之相位描繪圖如圖 3.4(a)、(b)所示。從圖中我們可清楚的看出,只有在 x2=[(-0.95603)/(-0.96161)]x1 這條線上,系統的解才會趨近鞍點。反之, 不在線上的部分則其解為無界。因此,我們可求得 b 及 c 點為不穩定 鞍點。 接著,我們可利用程式找出系統最大安全轉向角度範圍 (Matlab 程式詳見文獻[14]中附錄 C)。由程式可判定出在v25
m/s 下,當輸入 超出0.0113
rad 系統將會不穩定(系統響應如圖 3.5)。另外,我們以相 平面分析軟體分析:當輸入為0.0113
rad 及0.0114
rad 時,系統在相 平 面上 有何 變化 ? 模擬 結果 如圖 3.6 。 由 圖中可 看出 , 當輸 入為
rad 0114 . 0 時,系統的穩定節點消失,系統呈現不穩定現象。其次, 藉由觀察輸入從0.0113
rad 遞減至0.0114
rad 時,系統在相平面上平 衡點位置的變化,可找出當輸入為-0.01135068635
rad 時,可在相平面上 找出一無法被辨識為何種特性的 節點(如圖 3.7)。觀察該點的 Jacobin 矩陣(如圖 3.8),其符合文獻[14]中 3.2.1 中條件 3,因而此點稱為鞍節 分歧點(saddle-node bifurcation point)。利用圖 3.7 及鞍節分歧點之對稱 特性,我們可求得文獻[7]中系統在速度25
m/s
下的分歧圖(bifurcation點,黑色圓圈則為鞍節分歧點。利用前述鞍節分歧點求取方法及表 3.1 的低摩擦力路面參數,進行速度對車輛行駛穩定度分析之數值模擬 。 在速度為 15、20、25、30、35、40
m /s
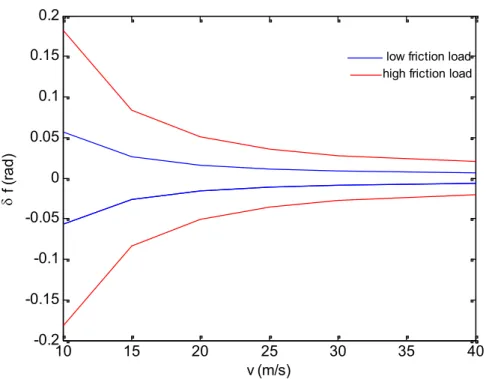
下可繪製出系統的分歧圖如圖 3.10 所示,轉向角的穩定範圍(如表 3.4 及圖 3.11 所示,其中藍色實線 所包覆f的範圍為轉向角的穩定範圍)。 最後,我們可針對速度、高低摩擦力路面、車重等因素對車輛行 駛之穩定度分析結果(請參考文獻[14]之討論),得到以下之結論: (1)速度對車輛行駛之穩定度分析 :當速度愈快時,車輛轉向系統愈早 發生分歧現象,使得系統的穩定結點愈早消失 ,導致轉向角度的穩定 範圍愈小。 (2)高低摩擦力路面對車輛行駛之穩定度分析 :在同樣的速度下,車輛 轉向系統在低摩擦力路面比在高摩擦力路面更早發生分歧現象 (請參 考圖 3.12:在速度為 25
m /s
下,車輛行駛在高低摩擦力路面時,車輛 轉向系統的分歧圖);在相同輸入下,車子行走於高摩擦力路面時的側 滑角與橫擺率皆遠小於低摩擦力路面(請參考圖 3.13:在相同輸入下, 車子行走在低摩擦力路面與高摩擦力路面及在不同速度下 ,車子的側 滑角與橫擺率的比較);高摩擦力路面的最大安全轉向範圍高於低摩擦 力路面的最大安全轉向範圍(請參考圖 3.14:在不同速度下,高低摩 擦力路面所能產生之最大安全轉向範圍 )。綜合上述,低摩擦力路面對車輛行駛之穩定度影響高於高摩擦力路面所產生之結果。 (3)車重對最大安全轉向範圍之影響分析:當車身愈重時,最大安全轉 向角度範圍也愈小。 表 3.1 高、低摩擦力路面參數表 參數 值/單位 參數 高摩擦路面 低摩擦路面 M 1500kg Bf 6.7651 11.275 f L 2 2 . 1 m Cf 1.3 1.56 r L 1.3m Df -6436.8 -2574.7 z I 3000kgm2 f E -1.999 -1.999 r B 9.0051 18.631 r C 1.3 1.56 r D -5430 -1749.7 r E -1.7908 -1.7908 表 3.2 系統平衡點特性表
Jacobian Matrix Eigenvalues Eigenvectors
a 0154 . 2 9221 . 3 98745 . 0 5637 . 2 i i 9488 . 1 2896 . 2 9488 . 1 2896 . 2 0.4441i -0.8938 0.062479 -0.8938 -0.4441i -0.062479 -b 0.67485 -11.8556 -1.0379 -9284 . 0 2.7086 4.3118 - 0.96161 -0.27443 0.95603 -0.29328 -c 0.67485 -11.8556 -1.0379 -9284 . 0 2.7086 4.3118 - 0.96161 -0.27443 0.95603 -0.29328
-表 3.3 不同速度下的最大安全轉向角度範圍
m s v / f穩定範圍 10 0.0568 15 0.026 20 0.0158 25 0.0113 30 0.0089 35 0.0076 40 0.0067 表 3.4 不同車重下車子的最大安全轉向 角度範圍
m s v30 / 穩定節點 鞍點 M 最大安 全f 值 b M -0.0089 0.0249 -0.0593 0.0294 -0.0664 b M 5 . 1 -0.0072 0.0248 -0.0384 0.0289 -0.0429 b M 2 -0.0064 0.0252 -0.0288 0.0280 -0.0311 b M 5 . 2 -0.0059 0.0249 -0.0227 0.0279 -0.0247 b M 3 -0.0056 0.0256 -0.0192 0.0269 -0.0200x1 ' = ( - 25747/15000 sin(39/25 atan(1189714682109441/35184372088832 x1 + 1189714682109441/35184372088832 atan(6/5 x2/v cos(x1)) - 1189714682109441/35184372088832 ue - 1999/1000 atan(451/40 x1 + 451/40 atan(6/5 x2/v cos(x1)) - 451/40 ue))) - 17497/15000 sin(39/25 atan(3658850635097841/70368744177664 x1 - 3658850635097841/70368744177664 atan(13/10 x2/v cos(x1)) - 4477/2500 atan(18631/1000 x1 - 18631/1000 atan(13/10 x2/v cos(x1))))))/v - x2 x2 ' = ( - 25747/25000 sin(39/25 atan(1189714682109441/35184372088832 x1 + 1189714682109441/35184372088832 atan(6/5 x2/v cos(x1)) - 1189714682109441/35184372088832 ue - 1999/1000 atan(451/40 x1 + 451/40 atan(6/5 x2/v cos(x1)) - 451/40 ue))) + 227461/300000 sin(39/25 atan(3658850635097841/70368744177664 x1 - 3658850635097841/70368744177664 atan(13/10 x2/v cos(x1)) - 4477/2500 atan(18631/1000 x1 - 18631/1000 atan(13/10 x2/v cos(x1)))))) cos(x1)v = 25ue = 0
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 x1 x2 b a c 圖 3.3 系統在速度v25
m/s 、輸入f 0下之相位描繪圖 u' = A u + B v v' = C u + D v A = -0.9284C = -11.8556 B = -1.0379D = -0.67485 -1 -0.5 0 0.5 1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 u v 圖 3.4(a) 以鞍點 b 為平衡點所生成線性化系統之相位描繪圖u' = A u + B v v' = C u + D v A = -0.9284C = -11.8556 B = -1.0379D = -0.67485 -1 -0.5 0 0.5 1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 u v 圖 3.4(b) 以鞍點 c 為平衡點所生成線性化系統之相位描繪圖 0 2 0 4 0 6 0 8 0 1 0 0 - 0 . 0 1 0 0 . 0 1 0 . 0 2 0 . 0 3 t ( ra d ) 0 2 0 4 0 6 0 8 0 1 0 0 - 0 . 0 8 - 0 . 0 6 - 0 . 0 4 - 0 . 0 2 0 t ( ra d /s ) 圖 3.5(a) v25m/s,f 0.0113系統響應圖 0 2 0 4 0 6 0 8 0 1 0 0 - 2 0 2 4 t ( ra d ) 0 2 0 4 0 6 0 8 0 1 0 0 - 1 - 0 . 5 0 0 . 5 1 t ( ra d /s ) 圖 3.5(b) v 25m/s,f 0.0114系統響應圖
x1 ' = ( - 25747/15000 sin(39/25 atan(1189714682109441/35184372088832 x1 + 1189714682109441/35184372088832 atan(6/5 x2/v cos(x1)) - 1189714682109441/35184372088832 ue - 1999/1000 atan(451/40 x1 + 451/40 atan(6/5 x2/v cos(x1)) - 451/40 ue))) - 17497/15000 sin(39/25 atan(3658850635097841/70368744177664 x1 - 3658850635097841/70368744177664 atan(13/10 x2/v cos(x1)) - 4477/2500 atan(18631/1000 x1 - 18631/1000 atan(13/10 x2/v cos(x1))))))/v - x2 x2 ' = ( - 25747/25000 sin(39/25 atan(1189714682109441/35184372088832 x1 + 1189714682109441/35184372088832 atan(6/5 x2/v cos(x1)) - 1189714682109441/35184372088832 ue - 1999/1000 atan(451/40 x1 + 451/40 atan(6/5 x2/v cos(x1)) - 451/40 ue))) + 227461/300000 sin(39/25 atan(3658850635097841/70368744177664 x1 - 3658850635097841/70368744177664 atan(13/10 x2/v cos(x1)) - 4477/2500 atan(18631/1000 x1 - 18631/1000 atan(13/10 x2/v cos(x1)))))) cos(x1)v = 25ue = - 0.0113
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 x1 x2 saddle point
stable equilibrium point
saddle point
x1 ' = ( - 25747/15000 sin(39/25 atan(1189714682109441/35184372088832 x1 + 1189714682109441/35184372088832 atan(6/5 x2/v cos(x1)) - 1189714682109441/35184372088832 ue - 1999/1000 atan(451/40 x1 + 451/40 atan(6/5 x2/v cos(x1)) - 451/40 ue))) - 17497/15000 sin(39/25 atan(3658850635097841/70368744177664 x1 - 3658850635097841/70368744177664 atan(13/10 x2/v cos(x1)) - 4477/2500 atan(18631/1000 x1 - 18631/1000 atan(13/10 x2/v cos(x1))))))/v - x2 x2 ' = ( - 25747/25000 sin(39/25 atan(1189714682109441/35184372088832 x1 + 1189714682109441/35184372088832 atan(6/5 x2/v cos(x1)) - 1189714682109441/35184372088832 ue - 1999/1000 atan(451/40 x1 + 451/40 atan(6/5 x2/v cos(x1)) - 451/40 ue))) + 227461/300000 sin(39/25 atan(3658850635097841/70368744177664 x1 - 3658850635097841/70368744177664 atan(13/10 x2/v cos(x1)) - 4477/2500 atan(18631/1000 x1 - 18631/1000 atan(13/10 x2/v cos(x1)))))) cos(x1)v = 25ue = - 0.0114
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 x1 x2 saddle point 圖 3.6 系統狀態軌跡(低摩擦力路面)圖 (a) f 0.0113
rad (b) f 0.0114
rad
rad (r ad )
rad (r ad )x1 ' = ( - 25747/15000 sin(39/25 atan(1189714682109441/35184372088832 x1 + 1189714682109441/35184372088832 atan(6/5 x2/v cos(x1)) - 1189714682109441/35184372088832 ue - 1999/1000 atan(451/40 x1 + 451/40 atan(6/5 x2/v cos(x1)) - 451/40 ue))) - 17497/15000 sin(39/25 atan(3658850635097841/70368744177664 x1 - 3658850635097841/70368744177664 atan(13/10 x2/v cos(x1)) - 4477/2500 atan(18631/1000 x1 - 18631/1000 atan(13/10 x2/v cos(x1))))))/v - x2 x2 ' = ( - 25747/25000 sin(39/25 atan(1189714682109441/35184372088832 x1 + 1189714682109441/35184372088832 atan(6/5 x2/v cos(x1)) - 1189714682109441/35184372088832 ue - 1999/1000 atan(451/40 x1 + 451/40 atan(6/5 x2/v cos(x1)) - 451/40 ue))) + 227461/300000 sin(39/25 atan(3658850635097841/70368744177664 x1 - 3658850635097841/70368744177664 atan(13/10 x2/v cos(x1)) - 4477/2500 atan(18631/1000 x1 - 18631/1000 atan(13/10 x2/v cos(x1)))))) cos(x1)v = 25ue = - 0.01135068635
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 x1 x2 saddle point
saddle-node bifurcation point
圖 3.7 系統分歧點圖 圖 3.8 系統分歧點特性
rad (r ad )
rad f -0.01135068635 - 0 .0 6 - 0 .0 4 - 0 .0 2 0 0 .0 2 0 .0 4 0 .0 6 - 0 .2 - 0 .1 5 - 0 .1 - 0 .0 5 0 0 .0 5 0 .1 0 .1 5 - 0 .0 6 - 0 .0 4 - 0 .0 2 0 0 .0 2 0 .0 4 0 .0 6 - 0 .1 - 0 .0 8 - 0 .0 6 - 0 .0 4 - 0 .0 2 0 0 .0 2 0 .0 4 0 .0 6 0 .0 8 0 .1 圖 3.9 v25m/s之分歧圖
rad f (r ad )
rad f (r ad )-0 .0 6 -0 .0 4 -0 .0 2 0 0 .0 2 0 .0 4 0 .0 6 -0 .2 -0 .1 5 -0 .1 -0 .0 5 0 0 .0 5 0 .1 0 .1 5 v= 4 0 m / s v= 3 0 m / s v= 2 0 m / s v= 1 5 m / s v= 2 5 m / s v= 1 0 m / s v= 3 5 m / s -0 .0 6 -0 .0 4 -0 .0 2 0 0 .0 2 0 .0 4 0 .0 6 -0 .2 5 -0 .2 -0 .1 5 -0 .1 -0 .0 5 0 0 .0 5 0 .1 0 .1 5 0 .2 0 .2 5 v= 1 0 m / s v= 1 5 m / s v= 2 0 m / s v= 2 5 m / s v= 3 0 m / s v= 3 5 m / s v= 4 0 m / s 圖 3.10 各速度下之分歧圖 1 0 1 5 2 0 2 5 3 0 3 5 4 0 - 0 . 0 6 - 0 . 0 4 - 0 . 0 2 0 0 . 0 2 0 . 0 4 0 . 0 6 v ( m / s ) f ( ra d ) 圖 3.11 v10~40
m/s
下轉向角度之穩定範圍 (r ad )
rad f
rad f (r ad )-0 .0 6 -0 .0 4 -0 .0 2 0 0 .0 2 0 .0 4 0 .0 6 -0 .2 5 -0 .2 -0 .1 5 -0 .1 -0 .0 5 0 0 .0 5 0 .1 0 .1 5 0 .2 0 .2 5 高 摩 擦 力 路 面 -0 .0 6 -0 .0 4 -0 .0 2 0 0 .0 2 0 .0 4 0 .0 6 -0 .4 -0 .3 -0 .2 -0 .1 0 0 .1 0 .2 0 .3 0 .4 圖 3.12 v25m/s下高低摩擦力路面之分歧圖
rad f (r ad )
rad f (r ad )圖 3.13 相同輸入下,高低摩擦力路面與之比較圖 10 15 20 25 30 35 40 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 v (m/s) f (ra d)
low friction load high friction load
第四章
車輛轉向系統連續時間控制器設計
回顧本論文第三章,我們由相平面分析及數值模擬與穩定性 分析 得知,當車輛速度過快或輸入超過最大安全轉向 角度範圍時,系統會 發生鞍節點分歧現象,使得系統無一穩定的節點,因而將導致系統本 身不穩定;若不施加適當控制補償,車輛很容易失控,甚而翻覆。在 文獻[12]中,作者成功地提出以回授線性化控制來解決此一導致系統不 穩定之現象。然而,回授線性化控制為一非線性時變控制法則 (請參 考第二章 2.1 節之推導),需要大量複雜的數值計算。因此,在計算複 雜度考量下,實有必要發展一較簡易但有效之新型控制器 。本論文延 續[12]中之結果,進一步提出一“非時變回授線性化控制”設計方法, 嘗試將回授線性化控制之時變控制值改 以一固定之增益值,並利用此 一簡化控制來控制車輛轉向系統之連續模型。另外,在傳統回授線性 化控制中存在一固定增益之 參數設計問題(詳見第二章 2.1 節之說 明),本章中將提出如何最佳設計此一參數值 。 在 4.1 節中,我們首先提出車輛轉向系統之一線性模型。在 4.2 節 中,我們依據所推導之線性化模型並仿照第二章 2.1 節回授線性化控制 設計方法,提出一非時變回授線性化控制。在 4.3 節中,我們針對車輛轉 向 系 統 之 線 性 模 型 提 出 一 最 佳 線 性 平 方 控 制 器 (linear quadratic regulator)控制法則。利用此一所推導出之最佳控制增益值 ,我們可解 決 4.2 節中所推導出非時變回授線性化控制之參數設計問題 。
4.1 線性化模型
將系統(3.4)-(3.5)式在平衡點 0 f 、0、0做一階 Taylor 級數展開, 我們可得一線性化結果如下:
f
f f
O
h f f f 0 , , 0 , , 0 , , 0 0 0 0 0 0 0 0 0 0
f f
O
h f f f f 0 , , 0 , , 0 , , 0 0 0 0 0 0 0 0 0 0 ( 4 . 1 ) 其中,O
h 及O
h 表示二階以上的高階項。令x
, T,
T x0 0,0 , 0 ~ x x x ,O
h
OT
h OT
h
T,並代入(3.12)式,可得系統動態誤差方 程式如下:
. ~ ~ 0 , , , , , , , , , , , , 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 h O x x f f f f f f f f f f (4.2) 令~ 0 f f u 。利用(3.4)-(3.5)式,並忽略高階項O
h ,我們可將(4.2)式 表示為下面系統線性化方程式 : u B x A x ~ ~ ~ (4.3)其中 22 21 12 11 a a a a A , 2 1 , , , , 0 0 0 0 0 0 b b B f f f f (4.4)
0 0 0
11 , , 1 f yr yf F F mv a (4.5a)
, ,
1 1 0 0 0 12 Fyf Fyr f mv a (4.5b)
0 0 0 0 0 0 0 21 , , , , cos yf f yr f f z F L F L I a (4.5c)
0 0 0 0 0 0 0 22 , , , , cos yf f yr f f z F L F L I a (4.5d)
0 0 0
1 , , 1 f yr yf f F F mv b (4.6a)
. , , , , cos 0 0 0 0 0 0 0 2 f f yr f f yf f z F L F L I b (4.6b) 請參考附錄 A 有關上述微分值 Fyf 、 Fyf 、 f yf F 、 Fyr 、 Fyr 、 f yr F 之 計算。4.2 非時變回授線性化控制器設計
在本節中,我們利用 3.1 節之回授線性化控制設計方法及 4.1 節之 線性模型來設計一非時變回授線性化控制器。首先,我們設計一針對 車輛轉向系統(3.4)-(3.5)之回授線性化控制。在任一平衡點下,我們可 將車輛轉向系統模型(3.4)-(3.5)改寫為下面一仿射-型式非線性系統:
x g
x u f x ~ ~ ~ ~ 1 1 1 (4.7)
x g
x u f x ~ ~ ~ ~ 2 2 2 (4.8) 其中 0 1 ~x , 0 2 ~x
0
2 2 0 0 0 0 1 ~ , ~ , ~ 1 ~ F x x F x x x x mv x f yf f yr f (4.9a)
0 0
0 0
0 1 1 2 ~ , ~ , ~ cos ~ f yr r f yf f z x x F L x x F L I x x x f (4.9b)
g
x mv x g1 ~ 1 u ~ (4.9c)
g
x I x x L x g u z f cos~ ~ ~ 0 1 1 2 (4.9d)
~
~ 0, 0
0. f f yf u x x F x g (4.9e) 現假設存在一非線性映射
T x T x T x T z ~ 1 ~ 2 ~ 能將(4.7)-(4.8)轉換成 下式:
A B K
z z f f (4.10) 其中 , 0 0 1 0 f A . 1 0 f B (4.11) 令回授增益K
k1 k2
,則回授線性化控制可設計如下 :
x
x K T
x
u~ ~ ~ ~ (4.12) 其中
g x x x T x g x x T x ~ ~ ~ ~ ~ ~ 1 ~ 2 2 2 1 1 2 (4.13)
~
~ . ~ ~ ~ ~ ~ 2 2 1 2 T x f x T x f x x (4.14)利用 3.1 節之推導,我們可得T ~1
x 、T ~2
x 需滿足下面條件式:
~
~ 0 ~ ~ ~ ~ 2 2 1 1 1 1 x g x x T x g x x T (4.15)
~
~. ~ ~ ~ ~ ~ 2 2 1 1 1 1 2 f x x x T x f x x T x T (4.16) 將(4.9c)-(4.9d)代入(4.15)式,我們可得下式:
~
0. ~ ~ cos ~ ~ 1 ~ 2 1 , 1 1 1 1 x x T I x x L x x T mv x g z e f u (4.17) 根據(4.17)式,我們可選擇T ~1
x 為
~ 1 ~2
sin
~1 10
sin
10
. 1 x x x I L x mv x T z f (4.18) 根據(4.16)-(4.17)式,我們可選擇T ~2
x 為
~
~ ,
. ~ cos ~ 0 0 0 2 2 0 1 1 2 yr f r f f z x x F mv L L x x L I x x x T (4.19) 根據(4.18)-(4.19)式,我們可計算下式
1 1 2 1 1 2 ~ ~ cos ~ ) ~ sin( ~ ) ~ ( x F x v m I L L F mv L L x L I x x x T yr z r f yr r f f z (4.20) 2 1 2 2 ~ ) ~ cos( ~ ) ~ ( x F mv L L L I x x x T f r yr f z (4.21) 利用(4.20)-(4.21),我們可計算
~x (4.13)及
~x (4.14)。 其次,代入下面關係式
11 12
2
21 22
1 1 2 2 1 ) ~ ( , ) ~ ( , ~ ) ~ ( , ~ ) ~ (x a a x f x a a x g x b g x b f (4.22) 並仿照(4.12)-(4.19)之推導過程,我們可得非時變回授線性化控制如下:
K T
x u~ ~ (4.23)其中 22 2 21 1 1 T b T b (4.24)
a11T21a21T22 a12T21a22T22
(4.25) , 22 21 1 2 T T b b T T21 b1a21b2a11, T22 b1a22b2a12. (4.26) 最後,我們可藉由羅斯穩定法則來判定線性化系統 (4.10)之K值在 何種條件下,可確保系統的穩定性。將系統(3.11)式改寫如下: z k k z 2 1 1 0 我們可得系統特徵方程式為 2 1 0 2 k k 。由羅斯穩定法則可知,當k1 及k2同時為負值時,系統(4.10)為穩定,反之則不穩定。值得一提的是 上述K值為控制器設計參數,不同K值會產生不同的控制效果,請參考 文獻[12]中有關如何選取較適合之K值的討論。4.3 最佳線性平方控制器(Linear quadratic regulator )設計
針對線性系統(3.27),我們可設計一最佳線性平方控制器 如下所 述。定義性能指標(Performance Index)如下:
x Qx u Ru
dt J t T T
0 ~ ~ ~ ~ 2 1 min (4.27) 其中QQT 0及R RT 0。依據最佳控制理論,我們可得最佳線性 控制如下:x K u~ *~ (4.28) 其中
S
B
R
K
*
1 T (4.29) S 為下面連續時間代數 Riccati 方程式(CARE):0
1
Q
S
B
SBR
S
A
SA
T T (4.30) 之解。雖然最佳線性控制增益值與系統設計參數Q及R設定相關,但Q 及R設定具有工程上直觀之物理意義,且模擬結果顯示:使用一般Q及 R設定值(請參考第六章模擬結果),其所設計出之控制效能一般而言 皆能獲致不錯之控制效果。 上述最佳線性控制增益值 * K 亦可用來設計 4.2 節中所提出之非時 變回授線性化控制增益值K,兩者之關係式如下:
1 *
1.
K
T
K
(4.31)第五章
車輛轉向系統離散時間控制器設計
拜電腦科技之賜,數位控制為現今最普遍之控制方法 ,而離散時 間控制法則又是其中最主要設計之關鍵。依據文獻[14]之模擬結果,我 們得知直接將回授線性化控制以歐拉前進時間差分近似法所得到的 離 散時間控制器在實用上具有很大之限制 。因此,在本章中我們嘗試設 計一針對車輛轉向系統控制之 較實際離散時間控制法則,以因應現今 較實際之數位控制器設計需求 。依據所推導離散模型之不同 ,本章將 提出兩種不同之離散時間控制法則。5.1 節中依據回授線性化控制所採 用仿射-型式非線性系統(4.7)-(4.8),我們提出一時變離散時間控制法 則,而在 5.2 節中依據線性模型(4.3),我們提出一非時變離散時間控制 法則。5.1 時變離散時間控制器設計
首先,我們可將(4.9a)-(4.9b)式改寫如下:
2 0 0 1 , , 1 ~ F x F x x mv x f yf f yr f (5.1)
1
0
0
2 , , cos ~ f yr r f yf f z x F L x F L I x x f (5.2) 將(5.1)-(5.2)式對平衡點x0做一階 Taylor 級數展開,並捨棄高階項,可將仿射-型式非線性系統(4.7)-(4.8)近似如下:
x u g x A x ~ ~ ~ ~ (5.3) 其中A
如(4.4)式所示,
T x g x g x g ~ 1 ~ 2 ~ 。 其次,將(5.3)式在取樣時間Ts取樣,我們可得下面離散時間模型 k k k s k A x B u x ~ ~ ~ 1 (5.4) 其中~xk x~
kTs 、u~k u~
kTs 及
. ~ , 0 k T s s T A k AT s e B e ds g x A s
s s (5.5) 最後,定義性能指標如下:
1 1 0 0 0 0 0 ~ ~ ~ ~ 2 1 ~ ~ ~ ~ 2 1 min N k k T k k T k T T N x Q x u Ru x Qx u Ru J (5.6) 其中Q0 Q0T 0,QQT 0及R RT 0,並依據最佳控制理論,我 們可得最佳線性離散時間控制[15]如下:
k s k T k k k T k k B P B R B P Ax u~ 1 ~ 1 1 (5.7) 其中
1.
1 k s T k k k T k k k T s s k T s kA
P
A
Q
A
P
B
B
P
B
R
B
P
A
P
(5.8) 由於(5.7)式中之Bk及Pk1矩陣在每一取樣點皆需重新計算,因此上述最 佳線性離散時間控制(5.7)為一時變離散時間控制法則。5.2 非時變離散時間控制器設計
由於 5.1 節中所推導之時變離散時間控制法則在每一取樣點皆需重新計算控制器增益值,因此對計算複雜度有特別考量的系統中並不 適用。在本節中,我們將提出一非時變離散時間控制法則之設計。 設計理念為將近似系統(5.3)以線性模型(4.3)取代。將(4.3)式在取樣 時間Ts取樣,我們可得下面離散時間模型 k s k s k A x B u x ~ ~ ~ 1 (5.9) 其中 . 0e ds B B s s T s s T A s
(5.10) 定義性能指標如下:
0 ~ ~ ~ ~ 2 1 min k k T k k T k Qx u Ru x J (5.11) 其中QQT 0及R RT 0。依據最佳控制理論,我們可得最佳線性 離散時間控制如下:
s k T s s T s k B PB R B PAx u~ 1 ~ (5.12) 其中 P 為下面離散時間代數 Riccati 方程式(DARE):
s T k k T k k T s s T sPA
Q
A
PB
B
PB
R
B
PA
A
P
1 (5.13) 之解。由於(5.12)式中之Bs及P矩陣只需事先計算一次,因此上述最佳 線性離散時間控制(5.12)為一非時變離散時間控制法則。第六章
模擬與驗證
在本章中,我們以數值模擬來驗證所提出之連續及離散時間控制 法則能確保車輛轉向系統之穩定性 。由於為能直接比較連續及離散時 間控制法則之效能,在模擬中我們採用四階 Runge-Kutta MATLAB 程 式(RK4)(程式詳見附錄 C)做為解微分方程之數值求解工具。模擬 中使用之車輛轉向系統之參數選用的是低磨擦路面的參數,因為車子 在低磨擦的路面較容易打滑也符合在下坡路面汽車的煞車效果 。 6.1 節提供數值模擬結果,顯示車輛轉向系統存在不穩定特性,並 進一步驗證連續回授線性化控制器可確保車輛轉向系統之穩定性 。在 6.2 節中,我們以數值模擬驗證了車輛轉向系統離散模型在適當的取樣 時間下,可近似車輛轉向系統連續模型。5.3 節以數值模擬驗證了第四 章中所改寫之離散回授線性化控制器能確保車輛轉向系統之穩定性 , 亦即證明了本論文所研究的車輛轉向系統之離 散控制在確保車輛轉向 系統的穩定性上是有效的。6.1 輸入-狀態回授線性化控制器控制成效之數值模擬
模擬狀況 1: 驗證車輛轉向系統(3.4)-(3.5)在無控制情況下會出現系統發散現象。設定系統初始狀態為 0.03、 0.06,利用附錄 C 之 RK4 MATLAB 程式,我們可求得車輛轉向系統(3.4)-(3.5)在無加控制情況下 之系統反應。模擬結果如圖 6.1 所示。 模擬狀況 2: 驗證輸入-狀態回授線性化控制器(4.12)能確保車輛轉向系 統(3.4)-(3.5)之穩定性 。在此我們考慮文獻 [12]中之分歧點 SNBP13 (0 0.0267,0 0.0454,f0 0.0067),詳細低摩擦力路面之穩定平衡 點與鞍點值,請參考附錄 B。 (1)設定參數為低摩擦力路面 、控制器增益
k1,k2
0.5,0.5
、高速
v40m/s
、初始狀態 0.03、 0.06、輸入f 0.0067
rad 。模擬 結果如圖 6.2 所示。 (2) 設 定 參 數 為 低摩 擦 力 路 面 、 控 制器 增 益
k1,k2
10,0.5
、 高速
v40m/s
、初始狀態 0.03、 0.06,輸入f 0.0067
rad 。模擬 結果如圖 6.3 所示。 (3)設定參數為低摩擦力路面 、 控制器增益
k1,k2
0.5,2.5
、高速
v40m/s
、初始狀態 0.03、 0.06,輸入f 0.0067
rad 。模擬 結果如圖 6.4 所示。 (4) 設 定 參 數 為 低摩 擦 力 路 面 、 控 制器 增 益
k1,k2
10,2.5
、 高速
v40m/s
、初始狀態 0.03、 0.06,輸入f 0.0067
rad 。模擬 結果如圖 6.5 所示。圖 6.1 顯示:車輛轉向系統在無施加控制的情況下,系統狀態在兩 秒後呈現不穩定現象,並開使發散。此一模擬結果與文獻[12]中所列結 果相同。圖 6.2 顯示:系統在加入回授線性化控制之後,原本系統在無 控制情況下會發散的情況得到改善,系統狀態在十秒後開使收歛至平 衡點。圖 6.3 顯示:相較圖 6.2 之模擬情況,當控制器增益k1數值變大 的時候,系統狀態振盪加劇,但反應的振幅較小,同時反應的時間較 快。圖 6.4 顯示:相較圖 6.2 之模擬情況,當控制器增益k2數值變大的 時候,系統振盪現象消失,但系統反應的時間並未改善。圖 6.5 顯示: 相較圖 6.2 之模擬情況,將控制器增益k1及k2的數值同時變大的時候, 不只系統振盪現象改善,同時系統反應的時間也明顯變快。 綜合上述模擬結果,我們得知車輛轉向系統為一多平衡點系統(詳 細資料請參考附錄 B),系統在無施加適當控制情況下,經常會發生不 穩定現象,而輸入-狀態回授線性化控制為一有效之控制方法,並能確 保車輛轉向系統之穩定性。模擬結果亦顯示回授線性化控制增益值與 系統反應狀態息息相關,初步觀察結果如下: (1) 增大控制器增益k1的數值:振盪增大、振幅減小、振幅增大。 (2) 增大控制器增益k2的數值:振盪減小、振幅減小、收斂較快。 藉由不斷調變增益k1及k2的數值,我們可求得車輛轉向系統反應之最佳 值。
圖 6.1 無施加控制情況下系統發散現象
圖 6.2 加入回授線性化控制
k1,k2
0.5,0.5
後系統收斂圖 6.4 加入回授線性化控制
k1,k2
0.5,2.5
後系統收斂 圖 6.5 加入回授線性化控制
k1,k2
10,2.5
後系統收斂6.2 非時變回授線性化控制器控制成效之數值模擬
由 6.1 節之模擬結果顯示,我們得知輸入-狀態回授線性化控制是 一能確保車輛轉向系統穩定性之有效控制方法。另由 4.2 節之推導,我 們得知本論文所提出之 非時變回授線性化控制 為一固定增益控制法 則,其控制架構遠較輸入-狀態回授線性化控制簡單。因而若能證實非 時變回授線性化控制亦能有效確保車輛轉向系統穩定性,則車輛轉向 系統控制器之設計將會大幅減化 ,有助於後續數位控制器之推導 。因此,本章節的目的即在驗證 4.2 節中所推導之非時變回授線性化控制能 確保車輛轉向系統(3.4)-(3.5)之穩定性。為能同時比較非時變回授線性 化控制與回授線性化控制之效能 ,在下面模擬中我們同時描繪出兩者 之系統反應,其中藍色線為前者之輸出,而紅色線為後者之輸出。為 能區別兩者,非時變回授線性化控制增益值以K1及K2表示。 模擬狀況 3: 驗證非時變回授線性化控制(4.23)能確保車輛轉向系統 (3.4)-(3.5)之穩定性。 (1)設定參數為低摩擦力路面 、控制器增益