第四章數位模擬結果
4.1 球體平衡桿控制系統模擬結果
本文針對積分型滑動模式控制器(ISMC) ,積分型滑動模式之小腦模型 控制器 (CISMC),模糊推論積分型滑動模式控制器(FISMC),模糊推論積分型滑動模式之小腦 模型控制器(FCISMC)四種控制器,進行系統模擬與比較,以驗證其可行性,在模擬過 程中,利用個人電腦視窗環境下,以 MATLAB5.3,C++等套裝軟體撰寫程式並進行模 擬,在模擬過程中,以球體平衡桿四階系統為受控體,分析並討論.系統的參數變動 及外加干擾分別為:
2 1 100
Ä A= 1×r(t)×A× k
100 (t) (t) 2 r(t) u
k
d = × ×
其中r(t)為介於1與-1中的隨機變數,k1=10及k2=10為一常數,分別為參數變 動及外部干擾的比例。
實例 1:受控體為德國 AMIRA 公司生產製造,球體平衡桿系統(Ball-on-Beam Balancing) 型號為 BW500,將系統線性化,狀態方程式如下:
u x
x x x
x x x x
+ −
−
−
= −
4960 . 3
0 0633 . 0
0
7130 . 1 3440 . 0 0 8980 . 18
1 0
0 0
0310 . 0 5920 . 6 0 0342 . 0
0 0
1 0
4 3 2 1
4 3 2 1
&
&
&
&
[ ]
=
4 3 2 1
0 0 0 1
x x x x y
y r e&= −
其中x1為球之位置,x2為球之速度,x3為橫桿轉動角度,x4為橫桿轉動角速度,
而系統特徵根分別為-3.8172 ,-0.4332 + 3.2859i,-0.4332 - 3.2859i,2.9707,故球體平衡桿 系統在開迴路是不穩定,經由x = Q x ,轉換至相位變數標準式速度如下所示:
u x
x x x
x x x x
+
−
−
=
1 0 0 0
7130 . 1 3782 . 0 5273 . 0 5639 . 124
1 0
0 0
0 1
0 0
0 0
1 0
4 3 2 1
4 3 2 1
&
&
&
&
吾人設計 ISMC,FISMC,CISMC,FCISMC 等控制器之系統特徵值均為-1,-1,-1,-1 0
1 4 6
4 )
1 )(
1 )(
1 )(
1 (
- = s + s + s + s + = s4 + s3 + s2 + s + = sI A
即得α1 = 4,α2 = 6,α3 = 4,α4 =1,β1 = 0,β2 = 0,β3 = 0,β4 =1便 可 設 計 滑 動 函 數 之 參數值為及積分器之增益值
1
4
4 = −
β
− α
=
G g1 = α3 + Gβ3 = 4 g2 = á2 + Gâ2 = 6 4
â1
1
3 = á + G =
g g4 =1
可選定滑動函數如下
e x x x x Ge x
g x g x g x g
s = 1 1 + 2 2 + 3 3 + 4 4 + = 4 1 + 6 2 + 4 3 + 4 −
狀態變數初值
[
x1 x2 x3 x4]
T =[
0 0 0 0]
Te x x
x x
ueq =−((124.5639) 1+(4.5732) 2 +(5.6218) 2 +(2.2870) 4)−&
表 4-1 球體平衡桿系統之各控制器的到達模式控制律 控制器種類
控制律 ISMC CISMC FISMC FCISMC
∆u 30 100
− +
− s
s s
30 100
− +
− s
s s
+100
−
− s
s s uf
+100
−
− s
s s uf
設定球體定位為 0.2 公尺,小腦模型控制器之學習率,設為á =0.1,參考輸入值,
分別為振幅 0.2 公尺步階函數,方波函數,正弦波函數,取樣時間 t = 0.01 秒,csec 為 10−2秒模擬結果,分別如下圖所示:
圖 4-1 球體平衡桿系統參考輸入振幅0.2公尺之步階函數。
圖 4-2 球體平衡桿系統參考輸入振幅±0.2公尺週期之 25 秒方波函數。
圖 4-3 球體平衡桿系統參考輸入振幅±0.2公尺週期之 48 秒正弦波函數。
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 0
0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5
X 1 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0
- 0 . 0 1 0 0 . 0 1 0 . 0 2 0 . 0 3 0 . 0 4 0 . 0 5 0 . 0 6 0 . 0 7
X 2 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-1a 各控制器x1狀態變數時間響應圖
圖 4-1b 各控制器x2狀態變數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 - 0 . 0 3
- 0 . 0 2 - 0 . 0 1 0 0 . 0 1 0 . 0 2 0 . 0 3 0 . 0 4
X 3 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0
- 3 0 - 2 5 - 2 0 - 1 5 - 1 0 - 5 0 5
u control law
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-1c 各控制器x3狀態變數時間響應圖
圖 4-1d 各控制器之控制律時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 0
0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5
y output
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0
- 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
r-y error
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-1e 各控制器之輸出時間響應圖
圖 4-1f 各控制器之誤差時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 - 0 . 0 4
- 0 . 0 3 - 0 . 0 2 - 0 . 0 1 0 0 . 0 1 0 . 0 2 0 . 0 3 0 . 0 4 0 . 0 5
ISMC slide function
t i m e ( c s e c )
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0
- 0 . 0 6 - 0 . 0 4 - 0 . 0 2 0 0 . 0 2 0 . 0 4 0 . 0 6
FISMC slide function
t i m e ( c s e c )
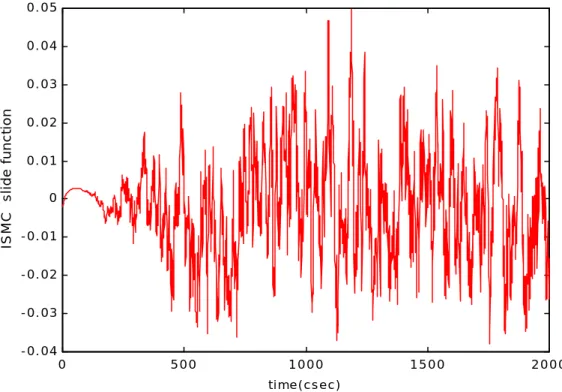
圖 4-1g ISMC 滑動函數時間響應圖
圖 4-1h FISMC 滑動函數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 - 0 . 0 5
0 0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5 0 . 3
CISMC slide function
t i m e ( c s e c )
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0
- 0 . 0 2 0 0 . 0 2 0 . 0 4 0 . 0 6 0 . 0 8 0 . 1 0 . 1 2 0 . 1 4 0 . 1 6 0 . 1 8
FCISMC slide function
t i m e ( c s e c )
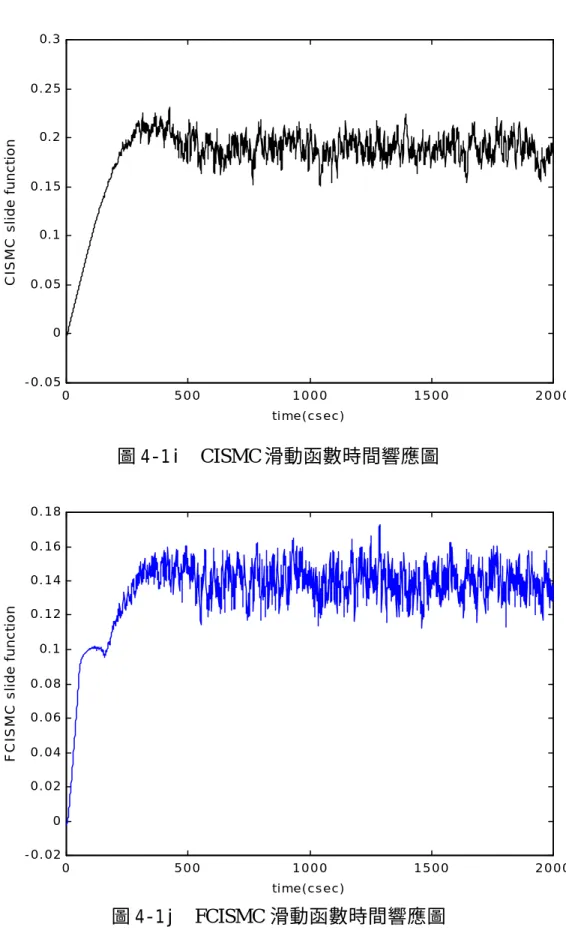
圖 4-1i CISMC 滑動函數時間響應圖
圖 4-1j FCISMC 滑動函數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 - 0 . 0 5
0 0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5 0 . 3
state variable
t i m e ( m s e c )
x1 x2 x3 x4
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0
- 3 5 - 3 0 - 2 5 - 2 0 - 1 5 - 1 0 - 5 0 5
FISMC control law
t i m e ( c s e c )
us uc u = u
s+ u
c
圖 4-1k FCISMC 各控制律時間響應圖
圖 4-1 l FCISMC 各狀態變數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5
X 1 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0
- 0 . 1 2 - 0 . 1 - 0 . 0 8 - 0 . 0 6 - 0 . 0 4 - 0 . 0 2 0 0 . 0 2 0 . 0 4 0 . 0 6
X 2 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-2 a 各控制器x1狀態變數時間響應圖
圖 4-2 b 各控制器x2狀態變數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 - 0 . 0 8
- 0 . 0 6 - 0 . 0 4 - 0 . 0 2 0 0 . 0 2 0 . 0 4
X 3 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0
- 3 0 - 2 0 - 1 0 0 1 0 2 0 3 0
u control law
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-2 c 各控制器x3狀態變數時間響應圖
圖 4-2 d 各控制器之控制律時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5
y output
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0
- 0 . 5 - 0 . 4 - 0 . 3 - 0 . 2 - 0 . 1 0 0 . 1 0 . 2
r-y error
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-2 e 各控制器之輸出時間響應圖
圖 4-2 f 各控制器之誤差時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 - 0 . 0 3
- 0 . 0 2 - 0 . 0 1 0 0 . 0 1 0 . 0 2 0 . 0 3 0 . 0 4
ISMC slide function
t i m e ( c s e c )
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0
- 0 . 0 4 - 0 . 0 3 - 0 . 0 2 - 0 . 0 1 0 0 . 0 1 0 . 0 2 0 . 0 3 0 . 0 4
FISMC slide function
t i m e ( c s e c )
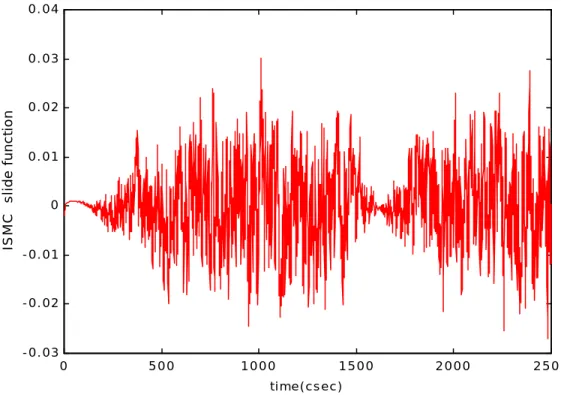
圖 4-2 g ISMC 滑動函數時間響應圖
圖 4-2 h FISMC 滑動函數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 - 0 . 2
- 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
CISMC slide function
t i m e ( c s e c )
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5
FCISMC slide function
t i m e ( c s e c )
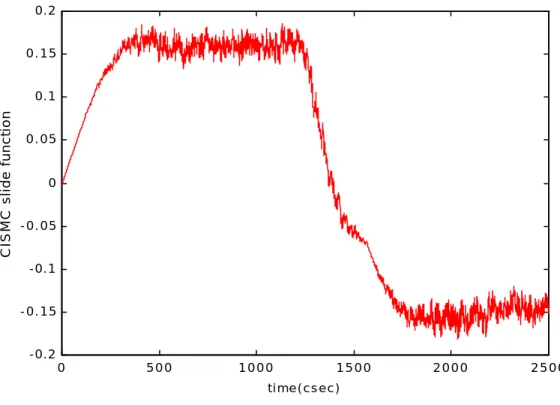
圖 4-2 i CISMC 滑動函數時間響應圖
圖 4-2 j FCISMC 滑動函數時間響應圖
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
r
X 1 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0
- 0 . 0 3 - 0 . 0 2 - 0 . 0 1 0 0 . 0 1 0 . 0 2 0 . 0 3
X 2 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-3 a 各控制器x1狀態變數時間響應圖
圖 4-3 b 各控制器x2狀態變數時間響應圖
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
r
y output
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5
r-y error
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-3 c 各控制器之輸出時間響應圖
圖 4-3 d 各控制器之誤差時間響應圖
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 - 0 . 0 3
- 0 . 0 2 - 0 . 0 1 0 0 . 0 1 0 . 0 2 0 . 0 3
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
CISMC slide function
t i m e ( c s e c )
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5
FCISMC slide function
t i m e ( c s e c )
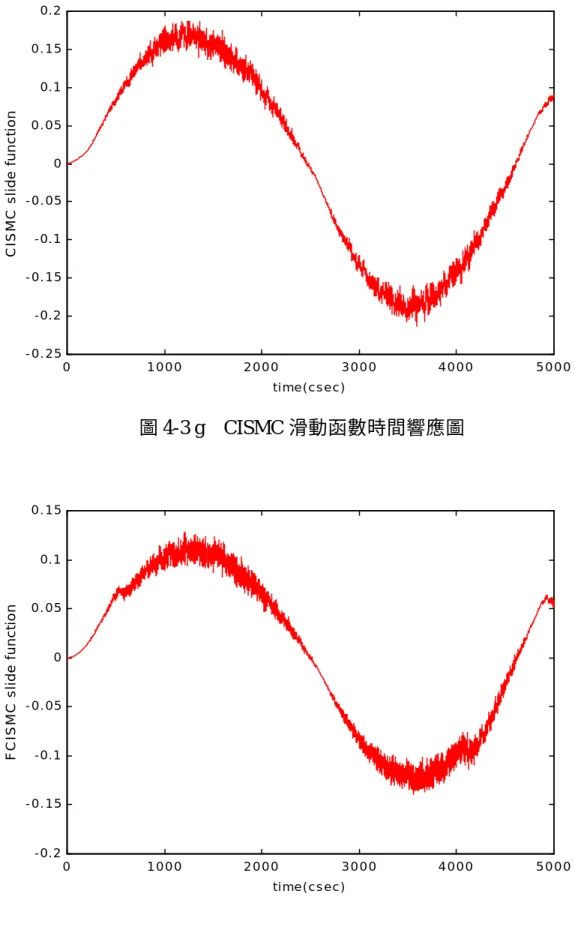
圖 4-3 g CISMC 滑動函數時間響應圖
圖 4-3 h FCISMC 滑動函數時間響應圖
經由模擬過程中,發現本論文提出的控制器,可適用於開迴路不穩定可控制型之線 性受控體系統,在設計系統參數特徵值的大小與正負值,直接影響整個系統的穩定度 及收斂速度的快慢,本控制器之系統特徵值必須設計在負值,才能使系統穩定,當設 計特徵值為較大的負值時,誤差響應時間與上昇時間收斂速度較快,反之當設計特徵 值為較小的負值時,誤差響應時間與上昇時間收斂速度較慢,而特徵值的多寡,需取 決於硬體設備的條件限制。模擬球體平衡桿控制系統時,球體平衡桿的長度為±0.4 公尺,在設計時必須要考量平衡桿的長短,以及控制器之控制量的大小,由圖 4-1a 中觀察出四種控制器相互比較下,得知在相同的特徵值條件下,CISMC 暫態響應時間 或上昇時間較為短暫,其次為 FCISMC,最後為 FISMC 與 ISMC,由圖 4-1b 圖 4-1c 中觀察出 CISMC 振動幅度為最高,其次為 FCISMC,最後為 FISMC 與 ISMC,圖 4- 1d 中觀察出 CISMC 控制律快速到達穩定狀態,其次為 FCISMC,最後為 FISMC 與 ISMC,圖 4-1e 與圖 4-1a 相同,因控制器的輸出為狀態變數x1,即為 y = x1,圖 4-1f 為誤差時間響應圖,CISMC 快速到達零穩態誤差,其次為 FCISMC,最後為 FISMC 與 ISMC,圖 4-1g,圖 4-1h,圖 4-1i,圖 4-1j,發現 CISMC 在滑動模式下,發生的偏 移量為其他控制器最大 ,其次為 FCISMC,最後為 FISMC 與 ISMC, 圖 4-1k 為 FCISMC,各控制律時間響應圖,即為u =us +uc,小腦模型輸出控制量uc是補償滑動 模式控制量us,使總控制量u減少。
由圖 4-2 球體平衡桿系統,參考輸入為振幅±0.2公尺週期之 25 秒方波函數,觀察 中得知,在系統參考輸入為方波函數,CISMC 會產生超越量,滑動函數偏移量最大。
圖 4-3 球體平衡桿系統,參考輸入為振幅±0.2公尺週期之 48 秒正弦波函數, 觀 察中得知。在系統參考輸入為正弦波函數,CISMC 期望值與實際輸出,誤差最少,其 次為,FCISMC,如下表可得知四種控制器的差異性。
表 4-2 球體平衡桿控制系統各控制器差異性 控制器種類
控制性能 FCISMC CISMC FISMC ISMC 上昇時間(步階函
數) 4.42 秒 3.19 秒 4.84 秒 4.99 秒 累積總誤差量(步
階函數) 0.708 0.61 0.805 0.803
滑動函數 偏移最小(0.1) 偏移最大(0.2) 顫動最小(0) 顫動最小(0)
超越量(方波) 無 有 無 無
延 遲 時 間 ( 正 弦
波) 7.24 秒 6.99 秒 7.81 秒 7.95 秒
4.2.雙倒單擺控制系統模擬結果
在模擬過程中,利用個人電腦視窗環境下,以 MATLAB5.3,C++等套裝軟體撰寫 程式並進行模擬,在模擬過程中,以雙倒單擺系統統為受控體,分析並討論.系統的 參數變動及外加干擾分別為:
2 1 100
Ä A= 1×r(t)×A× k
100 (t) (t) 2 r(t) u
k
d = × ×
其中r(t)為介於1與-1中的隨機變數,k1=10及k2=10為一常數,分別為參數變 動及外部干擾的比例。
實例 2:受控體為德國 AMIRA 公司生產製造,雙倒單擺系統(Tandem Pendulum)型號 為 PS600,將系統參數線性化,狀態方程式如下:
u
x x x x x x
x x x x x x
− + −
−
−
−
−
−
−
−
=
6639 . 1
0 4630 . 0
0 2315 . 0
0
3484 . 0 2073 . 74 0765 . 0 6994 . 4 6394 . 16 0
1 0
0 0
0 0
0048 . 0 2073 . 1 3409 . 0 9284 . 20 63
. 4 0
0 0
1 0
0 0
0024 . 0 5136 . 0 0106 . 0 6537 . 0 3149 . 2 0
0 0
0 0
1 0
5 4 3 2 1
5 4 3 2 1
&
&
&
&
&
&
其中x1為雙倒單擺定位之位置,x2為雙倒單擺定位之位置速度,x3為長倒單擺轉 動角度,x4為長倒單擺轉動角速度,x5為短倒單擺轉動角度,x6為短倒單擺轉動角速 度而系統特徵根分別為 0,-8.8799,8.4,-2.32,-4.8498,4.3573 雙倒單擺系統在開迴路是不 穩定,經由x = Q x,轉換至相位變數標準式速度如下所示:
u
x x x x x x
x x x x x x
+
−
−
−
=
1 0 0 0 0 0
3 5 . 93 9 . 240 1481 9
. 3202 0
1 0 0
0 0
0
0 1 0
0 0
0
0 0 1
0 0
0
0 0 0
1 0
0
0 0 0
0 1
0
6 5 4 3 2 1
6 5 4 3 2 1
&
&
&
&
&
&
[ ]
=
6 5 4 3 2 1
0 0 0 0 0 1
x x x x x x
y
y r e&= −
吾人設計 ISMC,FISMC,CISMC,FCISMC 等控制器之系統特徵值均為-1,-1,-1,-1, -1,-1
0 1 s 6 s 15 s 20 s 15 s 6 s ) 1 s )(
1 s )(
1 s )(
1 s )(
1 s )(
1 s ( -
sI A = + + + + + + = 6 + 5 + 4 + 3 + 2 + + = 即得
1 , 6 , 15 ,
20 ,
15 ,
6 2 3 4 5 6
1 = α = α = α = α = α =
α
1 , 0 ,
0 ,
0 ,
0 ,
0 2 3 4 5 6
1 = β = β = β = β = β =
β
便可設計滑動函數之參數值為及積分器之增益值:
G 1
6 6 =− β
−α
=
g1 =α5 +Gβ5 =6 g2 =á4 +Gâ4 =15 g3 =á3 +Gâ3 =20 g4 =á4 +Gâ4 =15
g5 =á5 +Gâ5 =6 g6 =1
可選定滑動函數如下:
e x x x x x
x
Ge x g x g x g x g x g x g s
+ −
+ +
+ +
=
+ +
+ +
+ +
=
6 5 4 3 2
1
6 6 5 5 4 4 3 3 2 2 1 1
6 15 20
15 6
狀態變數初值
[
x1 x2 x3 x4 x5 x6]
T =[
0 0 0 0 0 0]
Te x x
x x
x x
ueq =(0) 1+(3196.9) 2 +(1466) 3 +(-260.9) 4 +(-108.5) 5 +(-3) 6 +
表 4-3 雙倒單擺控制系統之各控制器的到達模式控制律 控制器種類
控制律 ISMC CISMC FISMC FCISMC
∆u 40 100
− +
− s
s s
40 100
− +
− s
s s
+100
−
− s
s s uf
+100
−
− s
s s uf
設定球體定位為 0.2 公尺,小腦模型控制器之學習率,設為á =0.1,取樣時間 t = 0.01 秒,模擬結果,分別如下圖所示:
圖 4-4 雙倒單擺系統參考輸入為振幅 0.2 公尺之步階函數。
圖 4-5 雙倒單擺系統參考輸入為振幅±0.2公尺週期 30 秒之方波函數。
圖 4-6 雙倒單擺系統參考輸入為振幅±0.2公尺週期 58 秒之正弦波函數。
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 0
0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5
X 1 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 1 6 0 0 1 8 0 0 2 0 0 0
- 0 . 0 0 5 0 0 . 0 0 5 0 . 0 1 0 . 0 1 5 0 . 0 2 0 . 0 2 5 0 . 0 3 0 . 0 3 5 0 . 0 4 0 . 0 4 5
X 2 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
4-4 a 各控制器x1狀態變數時間響應圖
4-4 b 各控制器x2狀態變數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 - 0 . 0 1 5
- 0 . 0 1 - 0 . 0 0 5 0 0 . 0 0 5 0 . 0 1 0 . 0 1 5
X 4 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-4 c 各控制器x3狀態變數時間響應圖
圖 4-4 d 各控制器x4狀態變數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0
- 0 . 0 1 5 - 0 . 0 1 - 0 . 0 0 5 0 0 . 0 0 5 0 . 0 1 0 . 0 1 5 0 . 0 2
X 3 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 - 0 . 0 2
- 0 . 0 1 5 - 0 . 0 1 - 0 . 0 0 5 0 0 . 0 0 5 0 . 0 1 0 . 0 1 5
X 5 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 1 6 0 0 1 8 0 0 2 0 0 0
- 2 0 0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0 1 6 0
u control law
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-4 e 各控制器 x 狀態變數時間響應圖5
圖 4-4 f 各控制器之控制律時間響應圖
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 1 6 0 0 1 8 0 0 2 0 0 0 - 0 . 1
- 0 . 0 8 - 0 . 0 6 - 0 . 0 4 - 0 . 0 2 0 0 . 0 2 0 . 0 4 0 . 0 6 0 . 0 8 0 . 1
ISMC slide function
t i m e ( c s e c )
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 1 6 0 0 1 8 0 0 2 0 0 0
- 0 . 0 8 - 0 . 0 6 - 0 . 0 4 - 0 . 0 2 0 0 . 0 2 0 . 0 4 0 . 0 6 0 . 0 8
FISMC slide function
t i m e ( c s e c )
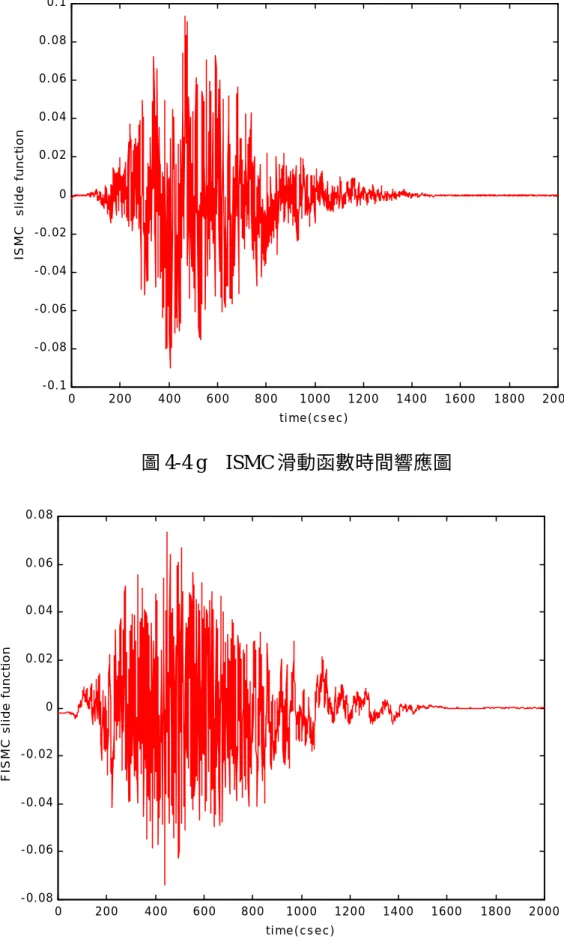
圖 4-4 g ISMC 滑動函數時間響應圖
圖 4-4 h FISMC 滑動函數時間響應圖
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 1 6 0 0 1 8 0 0 2 0 0 0 - 0 . 0 2
0 0 . 0 2 0 . 0 4 0 . 0 6 0 . 0 8 0 . 1 0 . 1 2 0 . 1 4 0 . 1 6
FCISMC slide function
t i m e ( c s e c )
圖 4-4 i CISMC 滑動函數時間響應圖
圖 4-4 j FCISMC 各控制律時間響應圖
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 1 6 0 0 1 8 0 0 2 0 0 0
- 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5 0 . 3
CISMC slide function
t i m e ( c s e c )
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 1 6 0 0 1 8 0 0 2 0 0 0 0
0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5
y output
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 1 6 0 0 1 8 0 0 2 0 0 0
- 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
r-y error
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-4 k 各控制器之輸出時間響應圖
圖 4-4 l 各控制器之誤差時間響應圖
0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 1 6 0 0 1 8 0 0 2 0 0 0 - 2 0
0 2 0 4 0 6 0 8 0 1 0 0 1 2 0 1 4 0
control law
t i m e ( c s e c )
us uc u = u
s+ u
c
圖 4-4 m FCISMC 各控制律時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5
X 1 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0
- 0 . 1 - 0 . 0 8 - 0 . 0 6 - 0 . 0 4 - 0 . 0 2 0 0 . 0 2 0 . 0 4 0 . 0 6
X 2 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-5 a 各控制器x1狀態變數時間響應圖
圖 4-5 b 各控制器x2狀態變數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0 - 0 . 0 4
- 0 . 0 3 - 0 . 0 2 - 0 . 0 1 0 0 . 0 1 0 . 0 2
X 3 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0
- 0 . 0 2 5 - 0 . 0 2 - 0 . 0 1 5 - 0 . 0 1 - 0 . 0 0 5 0 0 . 0 0 5 0 . 0 1 0 . 0 1 5 0 . 0 2 0 . 0 2 5
X 4 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-5 c 各控制器x3狀態變數時間響應圖
圖 4-5 d 各控制器x4狀態變數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0 - 3 0 0
- 2 5 0 - 2 0 0 - 1 5 0 - 1 0 0 - 5 0 0 5 0 1 0 0 1 5 0 2 0 0
u control law
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-5 e 各控制器x5狀態變數時間響應圖
圖 4-5 f 各控制器之控制律時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0
- 0 . 0 3 - 0 . 0 2 - 0 . 0 1 0 0 . 0 1 0 . 0 2 0 . 0 3 0 . 0 4
X 5 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5
y output
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0
- 0 . 4 - 0 . 3 - 0 . 2 - 0 . 1 0 0 . 1 0 . 2 0 . 3
r-y error
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-5 g 各控制器之輸出時間響應圖
圖 4-5 h 各控制器之誤差時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0 - 0 . 2
- 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
ISMC slide function
t i m e ( c s e c )
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
FISMC slide function
t i m e ( c s e c )
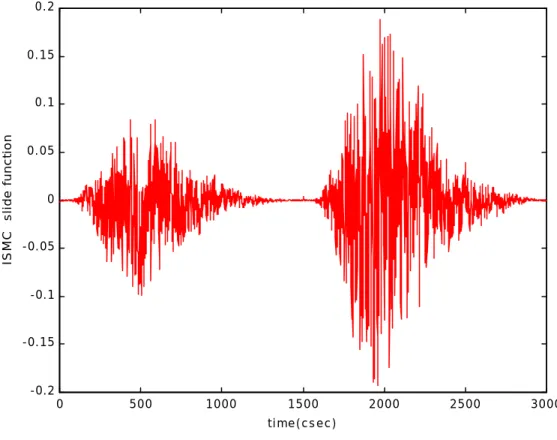
圖 4-5 i ISMC 滑動函數時間響應圖
圖 4-5 j FISMC 滑動函數時間響應圖
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0 - 0 . 4
- 0 . 3 - 0 . 2 - 0 . 1 0 0 . 1 0 . 2 0 . 3 0 . 4
CISMC slide function
t i m e ( c s e c )
0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0
- 0 . 2 5 - 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
FCISMC slide function
t i m e ( c s e c )
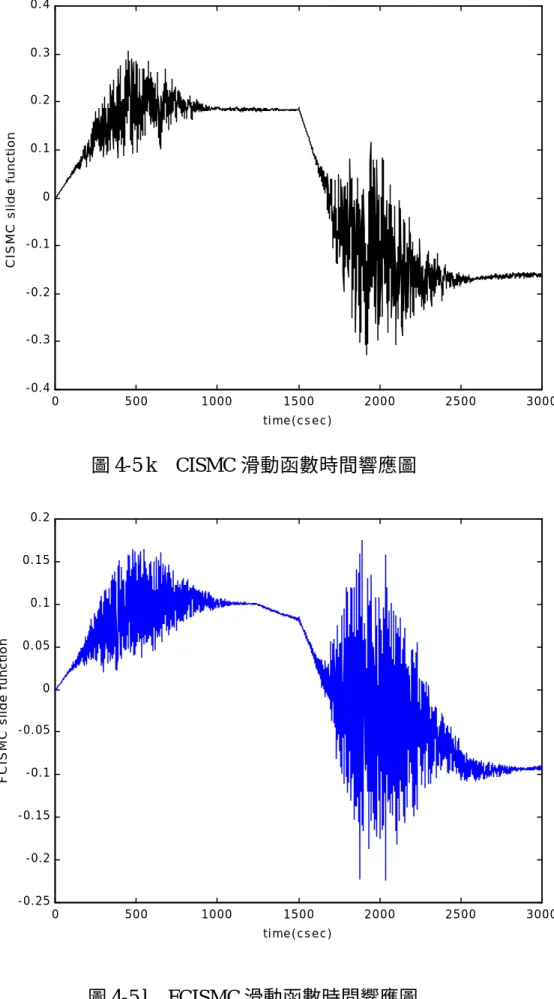
圖 4-5 k CISMC 滑動函數時間響應圖
圖 4-5 l FCISMC 滑動函數時間響應圖
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
r
X 1 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0
- 0 . 0 2 5 - 0 . 0 2 - 0 . 0 1 5 - 0 . 0 1 - 0 . 0 0 5 0 0 . 0 0 5 0 . 0 1 0 . 0 1 5 0 . 0 2 0 . 0 2 5
X 2 state variable
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-6 a 各控制器x 狀態變數時間響應圖1
圖 4-6 b 各控制器x 狀態變數時間響應圖2
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0 - 0 . 0 8
- 0 . 0 6 - 0 . 0 4 - 0 . 0 2 0 0 . 0 2 0 . 0 4 0 . 0 6 0 . 0 8
ISMC slide function
t i m e ( c s e c )
圖 4-6 c ISMC 滑動函數時間響應圖
圖 4-6 d FISMC 滑動函數時間響應圖
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0
- 0 . 0 8 - 0 . 0 6 - 0 . 0 4 - 0 . 0 2 0 0 . 0 2 0 . 0 4 0 . 0 6 0 . 0 8
FISMC slide function
t i m e ( c s e c )
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2 0 . 2 5
CISMC slide function
t i m e ( c s e c )
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5
FCISMC slide function
t i m e ( c s e c )
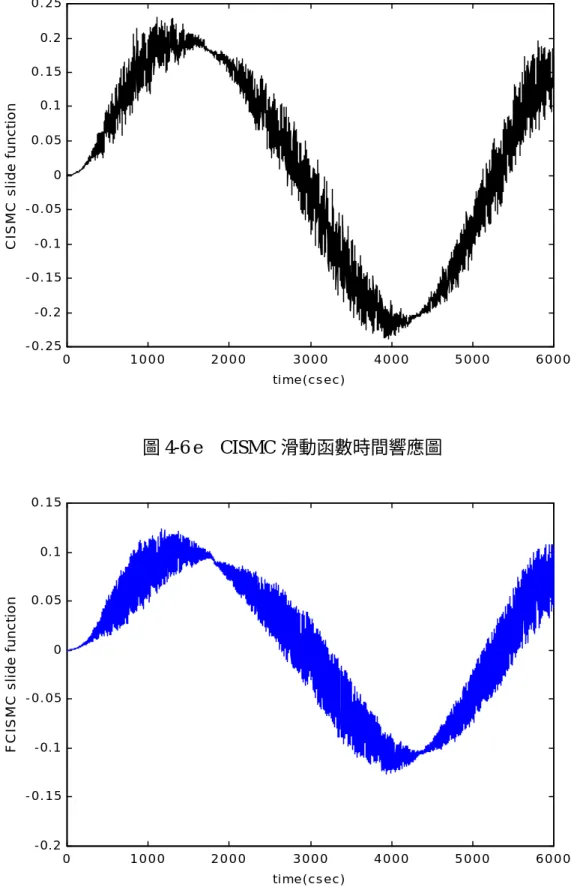
圖 4-6 e CISMC 滑動函數時間響應圖
圖 4-6 f FCISMC 滑動函數時間響應圖
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0 - 8 0
- 6 0 - 4 0 - 2 0 0 2 0 4 0 6 0 8 0
FISMC u control law
t i m e ( c s e c )
圖 4-6 g ISMC 控制律之時間響應圖
圖 4-6 h FISMC 控制律之時間響應圖
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0
- 8 0 - 6 0 - 4 0 - 2 0 0 2 0 4 0 6 0 8 0
ISMC u control law
t i m e ( c s e c )
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0 - 1 0 0
- 8 0 - 6 0 - 4 0 - 2 0 0 2 0 4 0 6 0 8 0 1 0 0
CISMC u control law
t i m e ( c s e c )
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0
- 1 0 0 - 8 0 - 6 0 - 4 0 - 2 0 0 2 0 4 0 6 0 8 0 1 0 0
FCISMC u control law
t i m e ( c s e c )
圖 4-6 i CISMC 控制律之時間響應圖
圖 4-6 j CFISMC 控制律之時間響應圖
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
r
y output
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5
r-y error
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-6 k 各控制器之輸出時間響應圖
圖 4-6 l 各控制器之誤差時間響應圖
經由模擬過程中,發現本論文提出的控制器,可適用於高階受控體雙倒單擺控制 系統,在設計高階受控體之控制器系統參數特徵值時,增加設計複雜度,而特徵值的 多寡,需取決於硬體設備的條件限制。
模擬雙倒單擺控制系統時,雙倒單擺的定位距離長度為±0.7 公尺,在設計時必須 要考量定位距離的長短,以及控制器之控制量的大小,圖 4-4 倒單擺系統參考輸入為 振幅 0.2 公尺之步階函數,圖 4-5 雙倒單擺系統參考輸入為振幅±0.2公尺週期 30 秒之 方波函數,圖 4-6 雙倒單擺系統參考輸入為振幅±0.2公尺週期 58 秒之正弦波函數,如 下表可得知四種控制器的差異性。
表 4-4 雙倒單擺控制系統各控制器差異性 控制器種類
控制性能 FCISMC CISMC FISMC ISMC 上昇時間(步階函
數) 5.43 秒 4.5 秒 6.05 秒 6.2 秒
累積總誤差量(步
階函數) 1.16 1.04 1.199 1.2
滑動函數 偏移最小(0.1) 偏移最大(0.2) 顫動最小(0) 顫動最小(0)
超越量(方波) 無 有 無 無
延遲時間 (正弦
波) 9.91 秒 9.51 秒 10.37 秒 10.37 秒
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0 - 0 . 2 5
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5 0 . 2
r
y output
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 6 0 0 0
- 0 . 2 - 0 . 1 5 - 0 . 1 - 0 . 0 5 0 0 . 0 5 0 . 1 0 . 1 5
r-y error
t i m e ( c s e c )
I S M C F I S M C C I S M C F C I S M C
圖 4-6 k 各控制器之輸出時間響應圖
圖 4-6 l 各控制器之誤差時間響應圖