5. Environmental map 的產生
此章我們將運用前一章所產生的攝影機架設位置的資訊,來產生 environmental map,將來可供車輛追蹤之用。
首先我們將前一章中的已佈置好攝影機的平面圖影像對其做二 值化,將白色區域值設為 1,其餘為 0,接著在停車場範圍內之區域 做connected component[Lin01]的計算,並且同時計算其質心位置,在 這裡有些區域的尺寸太小,可能僅有幾個像素點,我們將其忽略,而 由於我們欲對每個區域標記號碼顯示於影像中,最直覺的方式,便是 標記在其質心位置,但是有時候有些區域其質心並不在該區域中,如 圖5.1 所示,此時我們運用一種我們稱之為 shrinking 的方法,設法在 該區域中找出一個適當的位置來標記號碼顯示於影像中,方法詳述如 下:
一開始我們先求出做完 connected component 所得到的區域之邊 界,由於此區域中每個像素其值皆相同,所以我們找出該區域中的像 素其四個鄰居(4-neighbors) [Lin01]當中只要有一個值不相同,則該像 素即為邊界,如圖 5.2 所示,在該圖中,該區域的像素其值皆為 1,
而粗體標記的像素因其四個鄰居當中至少有一像素值不為1,所以為 邊界,接著我們於邊界上任取一點,以該點之右邊一點為優先,使用
5-1
逆時鐘的方式以及八鄰居的方法(8-neighbors) [Lin01]選取下一邊界 點,每當選取了下一邊界點時,便將之前的邊界點去除,直到再回到 原先選取的第一個邊界點,接著計算新的邊界點,再重複上述步驟,
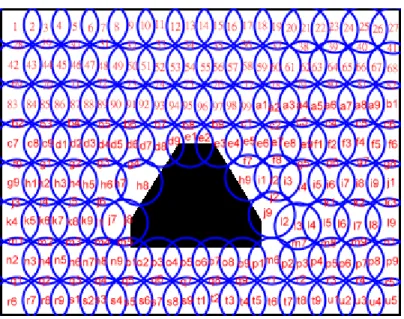
直到剩下一點,而此點也就是該區域標記號碼的位置,見圖5.3 之例 子,而圖5.4 為產生 environmental map 的結果。
圖5.1 p 點為彎月狀區域之質心,並不在該區域中。
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 1 1 1 1 0 0 0 0 0 0 0 1 1 1 1 1 1 0 0 0 0 0 1 1 1 1 1 1 1 1 1 0 0 1 1 1 1 0 0 1 1 1 1 0 0 1 1 1 0 0 0 0 1 1 1 0 0 1 1 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0
圖5.2 為做完 connected component 所得到的區域之一例,其中該區域之像素值 為1,而粗體標記之點表示為邊界。
圖5.3 為對應圖 5.2 做完二次 shrinking 所得到的之結果,黑色部分為該區域中去 除的邊界部份,剩下之一點為該區域標記號碼的位置。
5-2
圖5.4 為一 environmental map。
5-3