轉動慣量測量及角動量守恆實驗
一、目的:
測量不同形狀之物體繞特定對稱軸作旋轉運動時的轉動慣量,及驗證角動量守恆定律。
實驗內容包括:
[A]質點式剛體轉動慣量 [B]圓盤與圓環的轉動慣量 [C]圓盤的偏離軸心轉動慣量 [D]角動量守恆
二、原理:
(1)轉動運動和平移運動的比較
當物體的運動速度遠低於光速時,物體的平移運動滿足牛頓第二定律的運動方程式 F = ma (1) 式中m 為物體的慣性質量(inertia mass),F 為物體所受的淨外力,a 為運動加速度。對於轉動 運動,物體的運動方程式則須以淨力矩(net torque) τ、轉動體的轉動慣量(moment of inertia) I 和角加速度(angular acceleration) 分別取代平移運動方程式中的作用力 F、慣性質量 m 和加 速度a,改寫為下式:
τ = I (2) 設物體轉動的角度隨時間的變化為𝜃(𝑡),則角速度(angular velocity) ω 為𝜃(𝑡)對時間的微分,
角加速度為角速度 ω 對時間的微分。表一列出物體作移動運動和物體對某一固定軸轉動 時,其運動方程式及各種動力學方程式的對照比較。
表一 轉動與平移運動的運動方程式和動力學公式對照表比較
(2)轉動慣量
若不考慮摩擦力和空氣阻力等因素,物體平移運動的難易和運動體的形狀和運動方向無關,
僅取決於運動體的質量。但轉動運動則複雜多了,決定物體轉動的難易,不僅取決於物體的質 量,也取決於物體繞轉軸的位置和方向,通常以轉動慣量(rotational inertia) I 作為物體轉動難易 的指標。對相同質量的物體,其轉動慣量將依質量分佈、形狀、繞轉的旋轉軸不同,而有不同 的數值。對於形狀簡單或具高對稱性的物體,其轉動慣量可經由積分計算得到。具高對稱性的 幾種不同幾何形狀的均質剛體(uniform rigid body)繞不同軸旋轉的轉動慣量列於表二中。
對於對稱性低、形狀複雜、及密度不均勻的物體,則其轉動慣量很難以積分求出,此時就 必須透過實驗測量。可使物體作適當的轉動運動,經實驗測量直接獲得物體的轉動慣量。
表二 不同幾何形狀之均質剛體的轉動慣量計算公式
三、實驗器材:所有器材如圖1 所示
1. 轉動測量基台:組件包含 A-型底座、轉動基台零件、轉動平台(rotating platform),如 圖1(a)。
2. 轉動慣量配件:如圖 1(c)所示直徑 25.4 cm 的剛體圓盤,外徑 12.7 cm 的剛體圓環、
10 軸輻滑輪組和轉動平台連接固定器(rotating platform adapter) 3. 光電閘:見圖 1(d)
4. Arduino box01:見圖 1(e)
(a) 轉動基台所有組件
(b) 轉動基台組裝示意圖
(c) 剛體圓盤與圓環待測物,及滑輪組件
(d) 光電閘 (e) Arduino box01
圖 1 轉動基台(a)組件,(b)組裝示意圖,(c)剛體圓盤與圓環待測物及滑輪組件,(d)光 電閘,(e)Arduino box01。
四、儀器介紹和組裝 1. 轉動基台組裝:
依圖1(b)所示將圖 1(a)之組件組裝。
(1) 先將支撐桿插入 A 型底座(“A”base),在支撐桿底部套入“C”型環,使之固定。
(2) 如圖 1(b)所示,將轉動長直平台下方的固定孔插進支撐桿上端,注意有形狀限制。支撐 桿呈D 型。
2. 轉動基台底座的水平調整:轉動平台需處於水平狀態,如果不水平,會影響實驗結果的準 確度。請按下列步驟調整水平:
(a) (b) 圖2 轉動平台底座水平調整步驟示意圖。
(1) 如圖 2 所示,將重約 300 克的方形重物(300 g square mass)放在軌道的任何一邊,以所 附螺絲將之拴緊於轉動平台上。如果有裝向心力裝置,則裝置在同一邊。
(2) 調整底座一腳的螺絲,直到如圖 2(a)所示,軌道平台對準另一腳的螺絲。
(3) 然後,如圖 2(b)所示將軌道旋轉 90 度,會與 A 型底座的一邊成平行,再調整底座的另
一個腳螺絲,直到軌道能夠平穩的停留在這個位置。
(4) 若確實達到水平,則在不受外力作用下,轉動平台不論處於哪一方位都會靜止,不會 發生轉動。
3. 安裝 10 輪輻智慧滑輪及光電閘:兩配件的安裝位置和方式如圖 3 所示 (1) 使用光電閘
(a) (b)
圖3 智慧滑輪及光電閘的安裝示意圖 (1) 將支撐桿(photogate mount rod)插入底座靠近轉動桿的孔上。
(2) 鬆開底座的螺絲,讓支撐桿可以轉動,調整支撐桿與光電閘的方向,讓紅外線光束可 以通過智慧滑輪的孔洞。如果光電閘是用電腦驅動,可以利用觀察光電閘末端的LED 指示燈來得知。光電閘頭勿接觸滑輪。當光電閘頭在正確的位置時,拴緊底部的螺絲 固定支撐桿。如圖3(a)。
5. 使用滑輪與支撐桿
(1) 將滑輪水平架設。將滑輪的支撐桿插入黑色支撐桿的孔洞上旋緊於支桿上,並拴緊螺 絲。如圖3(b)。
(2) 調整黑色支桿位置,讓從中心轉軸的線能夠對齊滑輪上的溝槽,調整 A 型底座位置,
讓線能通過滑輪並不碰觸桌子邊緣。
6. 轉動剛體組裝:
(1) 待測的轉動剛體可以直接鎖定在轉動基座上方測量。
(2) 也可如圖 4 所示,將待測之轉動剛體利用轉動平台連接固定器(rotating platform adapter) 鎖定於轉動平台上操作。平台轉接器組裝過程:將方形螺帽(square nut)接到平台轉接器 平台上,如圖4,將平台連接固定器移至在待測剛體擬置放的位置,拴緊連接固定器,
以固定轉體。
(3) 圓盤可透過盤上四個不同位置的 D 形孔(“D”holes),選擇圓盤的轉動軸和轉動方式。
(a) 在盤面中心處的 D 形孔:如圖 4 中的左圖所示。固定此孔,使圓盤繞圓盤外的某一 轉軸轉動時,圓盤不會自轉。
(b) 位在另一盤面設有軸承的 D 形孔:如圖 4 中的右圖所示。可使圓盤繞圓盤外的某一 轉軸作公轉時,圓盤能夠繞經過圓盤面中心之垂直軸作幾近無磨擦阻力的自旋轉
動。
(c) 位於盤之邊緣上的兩個 D 形孔:兩孔相距 180 度,固定此 D 形孔,則轉動軸為通過 此孔的直徑軸。
圖4 圓盤轉體上四個 D 形孔洞位置和轉體組裝於轉動平台上的示意圖。
7. 轉動慣量測量原理
以圓盤為例說明轉動慣量測量原理,實驗裝置如圖5 所示。為找出轉動慣量,在物體上 施加一個已知的力矩,量測物體的角加速度,因為 = Iα,就可以得到轉動慣量。其中是 由懸掛物(砝碼)繞著裝置底座所產生的力矩,a 為懸掛重物的加速度。因為
𝜏⃑ = 𝑟⃑ × 𝑇⃑⃑ (3) 其中r 等於纏線物體的半徑,T 為物體轉動時線的張力。按牛頓第二運動定律可得
ΣF=mg-T=ma (4)
圖5 圓盤為例的實驗裝置圖。
所以線的張力T 為:
𝑇 = 𝑚(𝑔 − 𝑎) (5) 一旦知道懸掛物體m 的線性加速度 a,就可以得到力矩 及角加速度 α(角加速度等於 a/r)。
轉動慣量計算公式如下:
𝐼 =
𝑚𝑟2(𝑔−𝑎)𝑎 (6)
本實驗利用Arduino 讀取智慧滑輪的轉速,亦即旋轉體的角速度 ω,使用 EXCEL 做圖,線性 擬合求出角加速度α,則
𝐼 =
𝑚𝑟(𝑔−𝑟𝛼)𝛼
(7) 8. 摩擦力的修正
有幾個不同的方法可以找出摩擦力對實驗的影響,分別說明如下:
(1) 取適當的懸掛質量(約 5-15 公克之間),讓滑輪可以克服動摩擦力等速度落下。設該質量 為mf,則只要把公式(6)或(7)中的 m 以 m-mf取代就可以求得轉動慣量。
(2) 不加懸掛質量,讓旋轉物體轉動(注意:轉動方向與加上懸掛質量相同),測量角加速度 αf,將公式中的α 以α + |𝛼𝑓|取代 α 就可以求得轉動慣量。
(3) 如果繫懸掛質量的線不會碰觸地面,當旋轉質量降到最低點後,由於旋轉物體的慣性會 將旋轉質量往上拉,將旋轉質量下降及上升過程的角加速度求出,計算兩者絕對值的平均 值,代入公式(7)就可以求得轉動慣量。
在這裡必須強調如同滑車在軌道上的運動,當滑車質量改變,其摩擦力跟著改變。每次 改變旋轉體,都需要重新測量摩擦力的大小或影響。
[
A]質點式剛體的轉動慣量
質量為M 的物體繞著距其質心距離為 R 的某特定軸旋轉,若物體三個維度的尺寸都遠小
於旋轉半徑R,則可將之視為體積可忽略的質點。則該質點對此旋轉軸的轉動慣量為 I = MR2
式中M 為質量,R 為轉軸到物體質心的距離。
圖6 質點式剛體的實驗示意圖 實驗步驟:
1. 將方塊剛體鎖定在轉動平台上的任一位置,如圖 6。
2. 將智慧滑輪架設在底座,連結至 Arduino 盒。
3. 估算理論值的轉動慣量:秤量方塊剛體的質量 M 及量測旋轉軸到方塊中心的距離 R,理論 估算物體的轉動慣量。
4. 掛一個約 50 克的物體在滑輪上,纏繞繩子至上方並讓物體可以由桌子邊掉落至地板,做 旋轉角速度與時間的關係圖,由斜率得出角加速度。
5. 實驗求出摩擦力的修正,計算轉動慣量。
6. 將點質量從轉動平台上拿開,找出轉動平台的角加速度以及轉動慣量,然後再由全部的轉 動慣量減去,以得到點質量的轉動慣量。
7. 改變方塊位置,重複實驗步驟 4-6。
8. 比較理論值與計算值,討論之間的差異。
[B]圓盤與圓環的轉動慣量 一個均質圓環(如圖二所示)繞中心軸的轉動慣量為
𝐼 =1
2𝑀(𝑅12+ 𝑅22) (8) 其中M 是環的質量,R1為內徑半徑,R2為外徑半徑。
圖 7 圓環。
一個圓盤對中心軸的轉動慣量為:
𝐼 =1
2𝑀𝑅2 (9) 其中R 為圓盤半徑。
實驗步驟:
1. 直接將圓盤裝在中心軸上,圓盤的凹槽面要朝上。
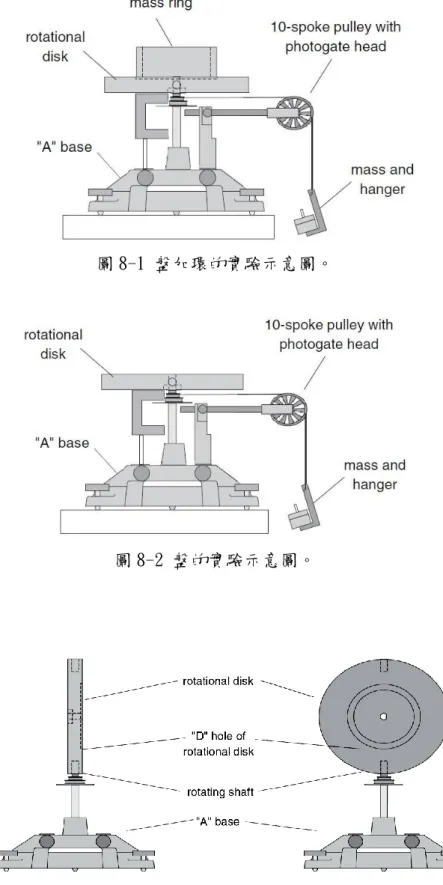
2. 將圓環放在圓盤的凹槽上,如圖 8-1。
3. 將智慧滑輪裝在底座並連結至 Arduino 盒。
4. 測圓盤與圓環的質量。
5. 測圓環的內徑與外徑,計算半徑 R1 , R2。測圓盤的直徑並計算圓盤的半徑R。
6. 計算圓環和圓盤的轉動慣量。
7. 掛一個約 50 克的物體在滑輪上,纏繞繩子至上方並讓物體可以由桌子邊掉落至地板,做 旋轉角速度與時間的關係圖,由斜率得出角加速度。
8. 實驗求出摩擦力的修正,計算圓盤加圓環的轉動慣量。
9. 將圓環從圓盤上移開,如圖 8-2,重複步驟 7-8,計算圓盤的轉動慣量。
10. 用全部的轉動慣量減去圓盤的轉動慣量即可得圓環的轉動慣量。
11. 將盤從軸上移開並轉動使其直立。透過盤旁邊的兩個 D 型孔,將盤直立插入到轉軸上,
如圖9,以同樣方法測得直立圓盤的的轉動慣量。
圖 8-1 盤加環的實驗示意圖。
圖 8-2 盤的實驗示意圖。
圖9 直立圓盤的實驗示意圖
[
C]圓盤的偏離軸心轉動慣量
理論上,一個圓盤的垂直軸心通過質心的轉動慣量為:
𝐼𝑐𝑚 = 1
2𝑀𝑅2 (10) 其中M 為圓盤的質量,R 為盤的半徑。而軸心平行質心軸的圓盤的轉動慣量為:
𝐼 = 𝐼𝑐𝑚+ 𝑀𝑑2 (11) 其中d 為兩轉軸的距離。
在本實驗的一部份中,將圓盤的軸承面架設在轉動平台上,圓盤能夠自由的在轉動平台 上轉動。所以當轉動平台轉動時,對於質心而言,圓盤是相對不轉動的。因此,其作用就如 同一個點質心,而非額外的物體,其轉動慣量會降低,由𝐼𝑐𝑚+ 𝑀𝑑2降低為𝑀𝑑2。
實驗步驟:
1. 如圖 10,將轉動慣量配件架設起來。將盤的軸承面(無凹槽面)朝上,用平台轉接器將盤 旋緊在較大的半徑上。
圖 10 2. 將智慧滑輪裝在底座並連結至 Arduino 盒。
3. 將盤的重量 M 秤重,量測盤的半徑 R,量測轉動軸心到盤的質心的距離 d。
4. 掛一個約 50 克的物體在滑輪上,纏繞繩子至上方並讓物體可以由桌子邊掉落至地板,做 旋轉角速度與時間的關係圖,由斜率得出角加速度。
5. 實驗求出摩擦力的修正,計算轉動慣量。
6. 將圓盤面反轉,軸承面朝下,重複步驟 4-5,計算轉動慣量。
7. 將圓盤從轉動平台上拿開,重複步驟 4-5,計算轉動慣量。
8. 由步驟 5-6 得到的轉動慣量,計算偏離軸心固定不動圓盤及自由轉動圓盤的轉動慣量。
[D]角動量守恆
當一個環掉落在轉動的盤上,整個系統並沒有淨力矩,因此,角動量並沒有改變,角動 量L 保持守恆。
𝐿 = 𝐼𝑖𝜔𝑖 = 𝐼𝑓𝜔𝑓 (12) 其中Ii是初始的轉動慣量,ωi是初始角速度。盤的初始轉動慣量為:
𝐼𝑖 = 1
2𝑀1𝑅2 (13)
終末時結合盤與環的轉動慣量為:
𝐼𝑖 = 1
2𝑀1𝑅2+1
2𝑀2(𝑅12+ 𝑅22) (14)
所以末角速度為:
𝜔f= 𝑀1𝑅2
𝑀1𝑅2+𝑀2(𝑅12+𝑅22)𝜔𝑖 (11) 實驗步驟:
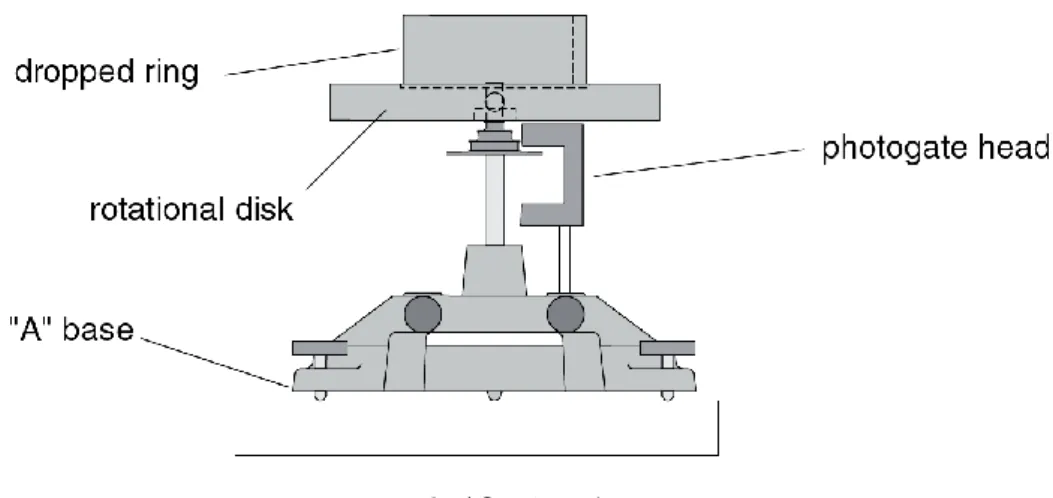
1. 將轉動慣量配件如圖 11 進行組裝,將圓盤有凹槽的哪一面朝上,讓環可以放入。
2. 將智慧滑輪光電閘架在底座的黑色支撐桿上,並調整位置,使其能跨立在中心轉軸的滑輪 孔上。在盤的中心正上方握住環,用手轉動盤。讀取角速度之後,放開環使之落在盤上,
如圖12。讀取角速度。
3. 量測盤秤重,量測半徑,以測量得到的初角速度𝜔𝑖,求理論末角速度𝜔𝑓,再將理論末角 速度𝜔𝑓與實驗量測所得的末角速度𝜔𝑓′。
圖 11 起始狀況
圖 12 終止狀況
問題:
1. 為什麼調水平時,要在轉動平台鎖定一方塊剛體?
2. 摩擦力的測量除實驗步驟中的方法,是否有其他方法可以測出摩擦力?
3. 本實驗測量轉動慣量的誤差來源有來些?請討論。
4. 何謂平行軸定理?何謂垂直軸定理?
5. 已知一個圓盤對中心軸的轉動慣量為 1
2𝑀𝑅2,試利用垂直軸定理證明,厚度可忽略的圓盤 對平行圓盤通過圓心轉軸的轉動慣量為 1
4𝑀𝑅2。
6. 承上題,試利用平行軸定理證明,厚度為 L 的圓盤對平行圓盤通過質心轉軸的轉動慣量為
1
4𝑀𝑅2+ 1
12𝑀𝐿2。
7. 承上題,試估算本實驗的圓盤,考慮厚度與不考慮厚度的轉動慣量差異多少%?