國 立 交 通 大 學
光 電 工 程 研 究 所
博 士 論 文
外差干涉術在中央條紋法的應用與誤差分析
The application and error analysis of heterodyne
interferometry with central fringe identification
technique
研 究 生 :吳旺聰
指導教授 :蘇德欽 教授
外差干涉術在中央條紋法的應用與
誤差分析
The application and error analysis of heterodyne
interferometry with central fringe identification
technique
研究生:吳旺聰
Student: Wang-Tsung Wu
指導教授:蘇德欽 教授 Advisor: Prof. Der-Chin Su
國 立 交 通 大 學
光 電 工 程 研 究 所
博 士 論 文
A Dissertation
Submitted in Partial Fulfillment of the Requirements
For the Degree of Doctor of Philosophy in
The Institute of Electro-Optical Engineering
College of Electrical Engineering and Computer Science
National Chiao-Tung University
Hsin-chu, Taiwan, R.O.C.
外差干涉術在中央條紋法的應用與誤差分析
研究生:吳旺聰
指導教授:蘇德欽 教授
國立交通大學 光電工程研究所
摘 要
外差式中央條紋定位法,是一種利用可調波長雷射結合外差干涉術與中央條 紋定位法,進行定位的絕對距離量測技術。具有光學架構簡單、定位方便、測量 範圍大、準確度高、準確度不易受到波長擾動影響等優點。本研究設法將外差式 中央條紋定位法應用在塊規厚度、透明帄板厚度及多階高樣本量測,其中多階高 樣本的量測是使用相機取樣的全場外差量測架構。 研究中,提出了外差式中央條紋定位法的快速定位步驟,並且發現外差式中 央條紋定位法原理中應考慮的初始相位問題;當系統的相位重複性較差時,也提 出了快速定位步驟中的波長選擇條件。另外整理了出外差干涉術可能有的 20 多 種誤差來源,並以程式模擬分析部分誤差對干涉信號相位項的影響,結果歸納出 最佳化的取樣參數設定。經由此研究可解決從前使用外差干涉術時不知道如何設 定最佳取樣參數的窘境,也能夠直接根據誤差來源強度推論出相位誤差的大小, 或是藉此評估實驗中最迫切需要改善的誤差來源。The application and error analysis of heterodyne interferometry with
central fringe identification technique
Student: Wang-Tsung Wu
Advisor: Prof. Der-Chin Su
Institute of Electro-Optical Engineering
National Chiao Tung University
ABSTRACT
Heterodyne central fringe identification technique is an absolute distance metrology technique, which combined the heterodyne interferometry and the central fringe identification method with a wavelength tunable laser. It has some merits such as simple optical configuration, easy operation, wide measurable range, high precision and the accuracy isn‟t easily affected by wavelength fluctuation. In this research, the heterodyne central fringe identification technique is applied on the gauge block, thickness of a parallel transparent plate, and multi-step height measurements. In the multi-step height measurement, the data is acquired by one camera with the full-field heterodyne central fringe identification configuration.
In this research, we propose fast identification procedures, and discover that the initial phase condition must be taken into account in the principle of heterodyne central fringe identification. As the phase repeatability is not good, the best wavelength suggestion is also proposed to the fast identification procedures. Besides, more than 20 kinds of error sources of the heterodyne interferometry are arranged. Then, we use simulation programs to analysis the phase error from some of the error sources. As a result, the optimal sampling conditions are induced. By this research, we solve the question of how to setup the sampling conditions in heterodyne interferometry, and induce phase error formulas to estimate the most important error in systems.
誌 謝
這本博士論文能夠順利完成,最要感謝的就是我的指導教授 蘇德欽教授, 蘇教授在光學量測方面的學識十分淵博,對於研究的直覺常令我得到相當大的啟 發,他的指導總是嚴而不厲,更多時候像是父親一樣的和藹,教授常秉持「教學 本土化,研究國際化」的原則也深深的影響我。許多研究生會稱自己的指導教授 為老闆,但在我們實驗室,我們更願意稱他為老師,因為他確實是理想的教師典 範。然而造化弄人,老師在我完成博士論文口詴後不久,就因病逝世並羽化而去 了,但老師慈祥的微笑、拖著地板短促的腳步聲、還有與老師爭論研究方法的回 憶已深深的刻在我的腦海,我會永遠感念老師的諄諄教導,謝謝老師。 另外也要感謝過去從實驗室畢業的學長們, 邱銘宏博士 以及 李朱育博 士,由於有他們過去的研究基礎,才能讓我站穩腳步並探索新的領域;感謝實驗 室的夥伴,謝博任、簡志成、楊惠婷、謝鴻志、陳彥良、張巍耀、徐凡媐、翁俊 仁與何承舫,在研究、修課與實驗方面的協助與陪伴,其中我要特別感謝謝鴻志 學長在這幾年的照顧與指導;也感謝我的朋友謝明憲與陳龍翌陪我談天論地,讓 我這段研究生涯增添許多樂趣。 最後要感謝我的父親 吳昆固先生、母親 胡瓊文女士、以及我的女友薇祺, 感謝你們長久以來的支持與鼓勵,讓我沒有後顧之憂,順利完成博士學位,願與 我最愛的家人分享這份榮耀!目 錄
中文摘要 ...i
英文摘要 ... ii
誌 謝 ... iii
目 錄 ... iv
表 目 錄 ... vii
圖 目 錄 ... viii
第一章 緒論 ... 1
參考文獻 ... 3第二章 外差干涉術 ... 6
2.1 前言 ... 6 2.2 外差干涉術的基本原理... 7 2.3 相位解析 ... 8 2.3.1 三參數最小方差弦波擬合法 ... 8 2.3.2 程式範例與提高效率的寫法 ... 11 2.4 外差光源 ... 12 2.4.1 EO 外差光源產生原理 ... 14 2.4.2 半波電壓的檢測方法 ... 16 2.4.3 EO 外差光源精確架設的方法 ... 17 2.5 小結 ... 18 參考文獻 ... 19 附錄 A:弦波的疊加 ... 22第三章 外差干涉術相位誤差與取樣最佳化設定 ... 24
3.1 前言 ... 24 3.2 誤差的種類... 24 3.2.1 EO 外差光源相位誤差 ... 24 3.2.2 基本光學元件相位誤差 ... 303.2.3 干涉儀系統誤差 ... 30 3.2.4 偏極元件相位誤差 ... 32 3.2.5 光偵測器誤差 ... 36 3.2.6 其他誤差 ... 41 3.3 總合分析 ... 41 3.4 模擬分析-最佳化設定與相位誤差 ... 44 3.5 小結 ... 51 參考文獻 ... 52 附錄 B:常被忽視的 Jones 矩陣問題 ... 53
第四章 外差式中央條紋法 ... 55
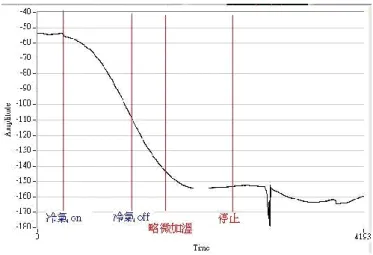
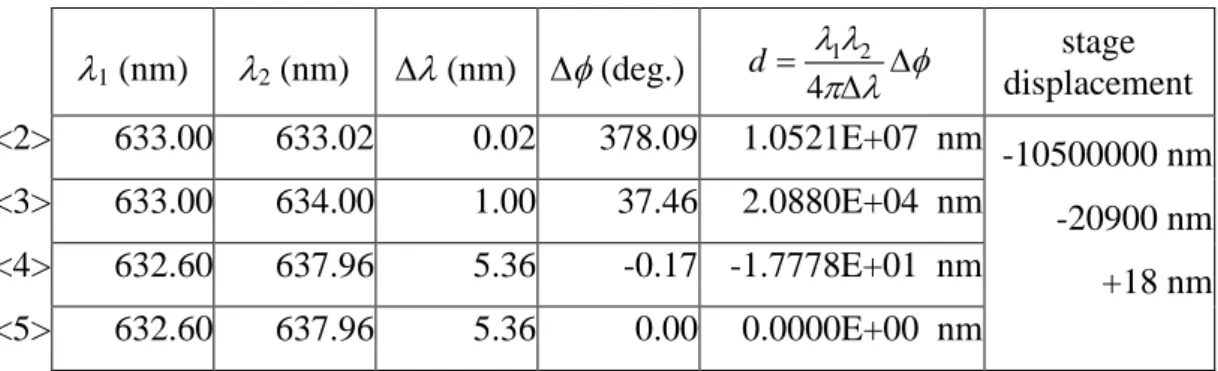
4.1 前言 ... 55 4.2 傳統的中央條紋定位法... 55 4.3 外差式中央條紋定位法... 57 4.3.1 非共光程外差干涉術 ... 57 4.3.2 外差式中央條紋定位法原理 ... 59 4.3.3 快速定位步驟 ... 61 4.3.4 波長變化量的選擇 ... 61 4.4 更正確的外差式中央條紋法原理 ... 62 4.5 使用外差干涉術精密測量位移 ... 63 4.6 小結 ... 64 參考文獻 ... 65第五章 以外差式中央條紋定位法進行塊規量測 ... 68
5.1 前言 ... 68 5.2 原理 ... 69 5.3 實驗 ... 70 5.4 討論 ... 73 5.5 小結 ... 74 參考文獻 ... 75第六章 以外差式中央條紋定位法測量透明帄板厚度 ... 76
6.1 前言 ... 76 6.2 原理 ... 76 6.2.1 第一種方法 ... 76 6.2.2 第二種方法 ... 80 6.3 實驗 ... 84 6.4 討論 ... 85 6.5 小結 ... 88 參考文獻 ... 90
第七章 以外差式中央條紋定位法進行全場階高量測 ... 92
7.1 前言 ... 92 7.2 原理 ... 93 7.3 實驗 ... 95 7.3.1 小區域量測的定位步驟 ... 96 7.3.2 全畫素的定位量測 ... 99 7.3.3 實驗結果 ... 101 7.4 討論 ... 103 7.5 小結 ... 103 參考文獻 ... 104第八章 未來工作與結論 ... 105
簡 歷 ... 107
著 作 ... 108
表 目 錄
Table 2.1 使的值域擴展為 。 ... 10 Table 2.2 使的值域擴展為 0 2。 ... 10 Table B.1 各種光學元件的 Jones 矩陣。 ... 54 Table 4.1. 各步驟的定位範例。 ... 61 Table 4.2 波長的選擇與 d 的解析範圍的關係。 ... 62 Table 5.1 各步驟的實驗數據(20°C)。... 72 Table 7.1 小區域量測中各步驟的實驗參數。 ... 97 Table 7.2 全畫素定位量測的相關參數。 ... 99圖 目 錄
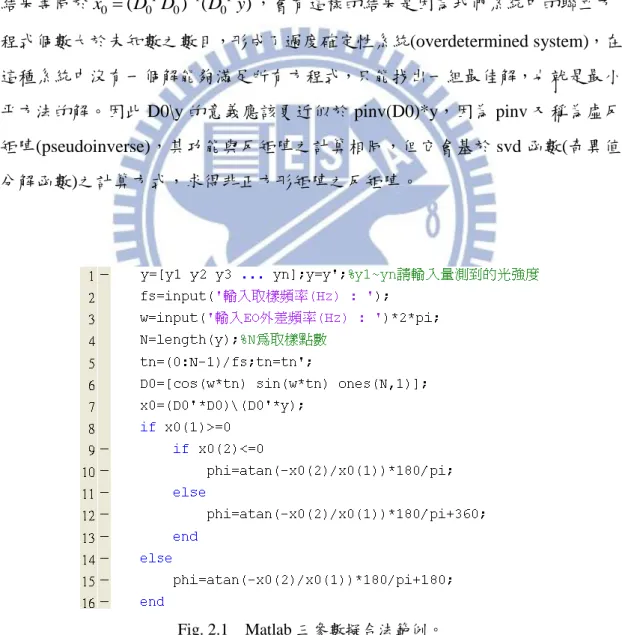
Fig. 2.1 Matlab 三參數擬合法範例。 ... 11
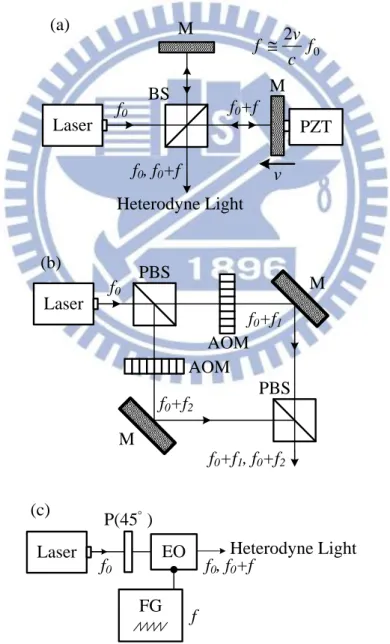
Fig. 2.2 (a)都普勒外差光源 (b)AO 外差光源 (c)EO 外差光源。 ... 13
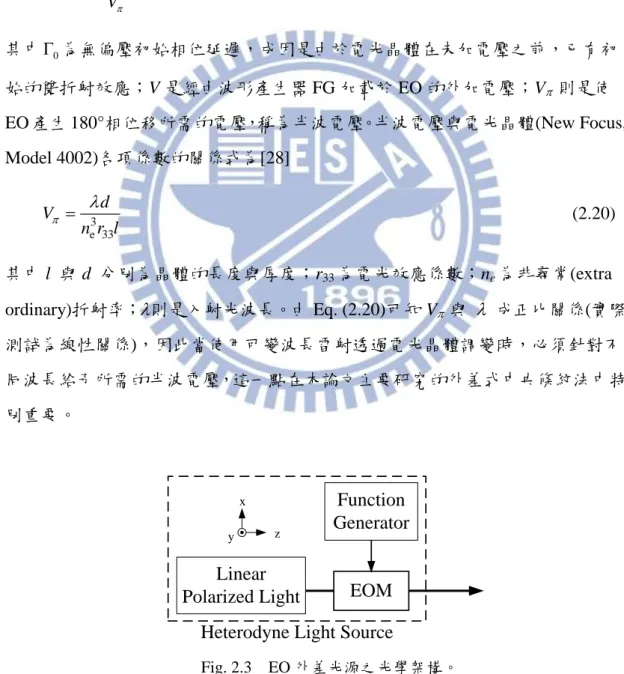
Fig. 2.3 EO 外差光源之光學架構。 ... 14 Fig. 2.4 驅動電光晶體的電壓信號。 ... 15 Fig. 2.5 半波電壓的檢測架構。 ... 16 Fig. 3.1 EO 外差干涉術常見架構簡圖。 ... 24 Fig. 3.2 EO 反應時間造成弦波斷點的示意圖。 ... 25 Fig. 3.3 鋸齒波訊號振幅為 120 V 時的干涉訊號@Vπ = 148 V, 0 = 60°。 . 26 Fig. 3.4 溫度對 EO 相位的影響。 ... 27 Fig. 3.5 偏極旋轉示意圖。 ... 27 Fig. 3.6 偏極旋轉誤差R、與R之間的關係圖。 ... 29 Fig. 3.7 各式環境振動來源示意圖。 ... 31 Fig. 3.8 PBS 的偏極混合現象。 ... 33 Fig. 3.9 偏極混合誤差m與的關係圖。 ... 35 Fig. 3.10 相機的 值預設為 1,偵測到的光信號。 ... 36 Fig. 3.11 關閉 值調整功能或是設為零,偵測到的光信號。 ... 36 Fig. 3.12 CCD 相機背景雜訊 10 秒內的跳動。 ... 37 Fig. 3.13 計算取樣頻率方法的示意圖。 ... 38 Fig. 3.14 取樣時間間隔不穩定的現象。 ... 40 Fig. 3.15 (a)取樣頻率逐漸降低,(b)取到的資料點所重建的波形。 ... 40 Fig. 3.16 模擬的流程。 ... 45 Fig. 3.17 程式控制面板。 ... 45 Fig. 3.18 內部組態。 ... 46 Fig. 3.19 不同條件下相位誤差標準差對 P 的關係圖。 ... 48 Fig. 3.20 不同參數時的相位誤差標準差。 ... 49 Fig. 4.1 干涉信號。 ... 56
Fig. 4.2 低同調干涉儀。 ... 56 Fig. 4.3 使用EO晶體調變之非共光程外差干涉術。 ... 57 Fig. 4.4 示波器上的信號。 ... 60 Fig. 4.5 精密位移測量系統架構圖。 ... 64 Fig. 5.1 測量塊規新法的光學裝置。 ... 69 Fig. 5.2 相位計的相位重複性測詴。 ... 71 Fig. 5.3 示波器上的信號。 ... 72 Fig. 6.1 實驗架構簡圖。 ... 77 Fig. 6.2 實驗架構簡圖。 ... 81 Fig. 6.3 四組定位點在空間上的關係。 ... 82 Fig. 6.4 相位計的重複取樣測詴。 ... 85 Fig. 6.5 當波長變化時,相位的變化情形 (a)正確的定位 (b)錯誤的定位。 . 86 Fig. 6.6 對焦不準確示意圖。 ... 86 Fig. 6.7 同時考慮面鏡傾斜、透鏡離軸與對焦不準的示意圖。 ... 88 Fig. 7.1 中央條紋定位實驗架構。 ... 93 Fig. 7.2 樣本示意圖(虛線區域表示量測範圍)。 ... 95
Fig. 7.3 (a) 樣本表面的影像,(b) s-與 p-偏光干涉後的影像,(c) 過 IEEE1241 弦波擬合後的相位分佈(單位為 degree)。 ... 96 Fig. 7.4 小區域量測。 ... 97 Fig. 7.5 在不同距離下波長變化與相位變化量的關係。 ... 98 Fig. 7.6 步進量測的定位結果示意。 ... 99 Fig. 7.7 全場階高量測實驗流程示意圖。 ... 100 Fig. 7.8 全畫素的定位量測參數控制面板。 ... 100 Fig. 7.9 階高樣本的全場量測結果。 ... 101 Fig. 7.10 (a)AB 線段的高度剖面圖 (b)其中 1~300 畫素的高度分布。 ... 102 Fig. 7.11 本方法(實線)與掃描探針顯微鏡(虛線)的量測結果。 ... 102
第一章 緒論
外差干涉術(heterodyne interferometry)由於具有精確度高、可快速量測、不 易受背景光干擾等優點,因此被廣泛的應用在表面輪廓、距離量測[1,2]、表面粗 糙度檢測[3,4]、折射率量測[5,6]、薄膜厚度量測、物體微小位移測量[7],小角度 量測[8,9],絕對距離測量[10,11],折射率[12-14]、雙折射率測量[15]等系統中。 而中央條紋(central fringe)是光學干涉儀裡的重要特性之一,當中央條紋出現時, 表示干涉儀兩臂所引入的光程差(optical path difference)是相等的。利用決定中央 條紋位置的方法,可以應用在位移、壓力、溫度、應力以及任何可以轉換成位移 量參數的測量上[16-19]。1996 年,李朱育等人提出以可調波長雷射(wavelength tunable laser)結合外差 干涉術與中央條紋法,用以定位出干涉儀兩臂等長的位置的技術,我們稱之為外 差式中央條紋定位法。外差式中央條紋定位法,原理上與雙波長干涉術[20]類 似,皆利用到等效波長的特性。雙波長干涉術是直接由兩個波長分別取得的相 位,能夠以等效波長推算出干涉儀兩臂的光程差,量測快速又方便,但是當應用 在絕對距離量測時,在,光程差越大會使得距離的準確度越低;而外差式中央條 紋定位法,由於是定位在變波長前後相位變化量為零的位置,也就是兩臂光程差 為零的位置,因此當應用在絕對距離量測時,不會因距離較長就使準確度變差。 另外,外差式中央條紋定位法具有光學結構簡單、定位方便、測量範圍大、準確 度高、準確度不易受到波長擾動影響等優點,是一種很有潛力的新型量測技術。 本研究將外差式中央條紋定位法應用在幾種不同的待測對象上,對於不同的 待測物皆提出了相配合的原理與實驗方法,如第五章到第七章的應用。起初研究 時發現用來做為相位計使用的鎖相放大器(lock-in amplify),常常會有定不住相位 的問題,同時為了第七章的全場外差式中央條紋定位法的研究,迫使我們開發了 電腦虛擬示波器以及虛擬相位計,也意外地讓筆者對於外差干涉術的相位誤差理 論有更深入的了解與研究動機。 為了徹底地了解外差式中央條紋定位法的誤差來源,必頇回歸到外差干涉術 來分析其相位誤差的成因。由 2007 年與 2011 的兩篇取樣最佳化研究[21,22]給予 的靈感,與外差干涉術應用過程中所觀察到的誤差現象,本研究也歸納這些誤 差,並找出合理的最佳化條件。
研究外差式中央條紋法之前,必頇先了解此方法的基礎知識,因此在第二章 中說明了外差干涉術的原理,以及如何利用電腦進行相位解析,並提出程式範例 與提高效率的寫法;在外差光源的架構部份,介紹了各式外差光源,以及本論文 所用之電光晶體調變器的工作原理,並交代如何精確的架設 EO 外差光源。提供 往後相關研究人員能夠快速地了解並應用 EO 外差干涉術。 接著在第三章中,說明了各種相位誤差與來源,對於外差干涉術的各部份元 件進行分類討論,如:外差光源、基本光學元件、干涉儀系統、偏極元件、光偵 測器等,共二十多種誤差來源,並整理了整體的數學表示式,再利用程式模擬擬 合頻率錯誤與均勻隨機雜訊兩項誤差的影響並分析,最後歸納出相位誤差量與這 兩項誤差之間的數學關係,另外還能夠解析出最佳化的取樣週期數。能 夠 解 決 以 往 不 知 道 該 如 何 設 定 實 驗 參 數 的 窘 境 第 四 章 則 說明了外差式的中央條紋定位法的原理以及實驗時的快速定位 步驟,特別針對相位重複性較差的系統來評估波長的選擇,接著又修正了外差中 央條紋法中的初始相位隨波長變化的問題,而為了提高中央條紋法中移動帄台的 定位準確度,提出使用外差干涉儀來精密測定移動帄台的位移量。 第五章利用外差式中央條紋定位法,來進行塊規兩端的零光程差的位置定 位,並且待測物的量測範圍只受限於移動帄台的最大行程,而不像傳統的超出片 段法會受限於雷射的同調長度。本研究證明了外差式中央條紋定位法在塊規量測 上的可行性。 而在透明帄板厚度量測上,由於大多數的現有技術在測量樣本時,準確度會 隨著樣本厚度的增加而下降[23-26],或是使用很難被準確測量的物鏡有效數值孔 徑來推導透明帄板的幾何厚度[27,28],使得在樣本厚度大於 1 mm 時,很難得到 奈米等級的準確度。因此在第六章,提出兩種外差式中央條紋定位法的應用架 構,來準確地測量透明帄板的幾何厚度。 為了量測具有二維階高分佈的樣本,在第七章以一部 CCD 相機結合外差式 中央條紋法,來定位出樣本各階高帄面的高度分佈,能夠同時量測具有大小階高 分佈的樣本,並能保持高準確度。在此研究中為了避免人為操作造成誤差,以及 提升實驗量測的效率,也發展自動化控制及量測系統。 最後一章將對本研究做一個總結,並提出幾種未來可能繼續的研究方向。
參考文獻
1. E. Collett, Polarized light: fundamentals and applications, Marcel Dekker, New York, 515-556 (1993).
2. H. Kikuta, K. Iwata, and R. Nagata, “Distance measurement by the wavelength shift of laser diode light,” Appl. Opt. 25, 2976-2980 (1986).
3. E. Gelmini, U. Minomi, and F. Docchio, “Tunable, double-wavelength heterodyne detection interferometer for absolute distance measurement,” Opt.
Lett. 19, 213-215 (1994).
4. G. E. Sommargren, “Optical heterodyne profilometry,” Appl. Opt. 20, 610-618 (1981).
5. D. Pantzer, J. Politch, and L. Ek, “Heterodyne profiling instrument for the angstrom region,” Appl. Opt. 25, 4168-4172 (1986).
6. D. C. Su, J. Y. Lee, and M. H. Chiu, “New type of liquid refractometer,” Opt.
Eng. 37, 2795-2797 (1998).
7. D.C. Su, M. H. Chiu, and C. D. Chen, “A heterodyne interferometer using an electro-optic modulator for measuring small displacements,” J. Opt. 27, 19-23 (1996).
8. M. H. Chiu and D. C. Su, “Angle measurement using total-internal-reflection heterodyne interferometry,” Opt. Eng. 36, 1750-1753 (1997).
9. M. H. Chiu and D. C. Su, “Improved technique for measuring small angle,” Appl.
Opt. 36, 7104-7106 (1997).
10. H. Kikuta, K. Iwata, and R. Nagata, “Distance measurement by the wavelength shift of laser diode light,” Appl. Opt. 25, 2976-2980 (1986).
11. E. Gelmini, U. Minomi, and F. Docchio, “Tunable, double-wavelenght heterodyne detection interferometer for absolute distance measurements,” Opt.
Lett. 19, 213-215 (1994).
12. M. H. Chiu, J. Y. Lee, and D. C. Su, “Refractive index measurement based on the effects of the total internal reflection and the uses of the heterodyne interferometry,” Appl. Opt. 36, 2936-2939 (1997).
13. D. C. Su, J. Y. Lee, and M. H. Chiu, “New type of liquid refractometer,” Opt.
Eng. 37, 2795-2797 (1998).
14. J. Y. Lee and D. C. Su, “A method for measuring Brewster‟s angle by circularly polarized heterodyne interferometry,” J. Opt. 29, 349-353 (1998).
15. Y. C. Huang, C. Chou, and M. Chang, “Direct measurement of refractive Indices of a linear birefringent retardation plate,” Opt. Commun. 133, 11-16 (1997). 16. Y. J. Rao, Y. N. Ning, and D. A. Jackson, “Synthesized source for white-light
sensing systems,” Opt. Lett. 18, 462-464 (1993).
17. P. Sandoz, G. Tribillon, and H. Perrin, “High-resolution profilometry by using phase calculation algorithms for spectroscopic analysis of white-light interferograms,” J. Mod. Opt. 43, 701-708 (1996).
18. P. D. Groot and L. Deck, “Surface profiling by analysis of white-light interferograms in the spatial frequency domain,” J. Mod. Opt. 42, 389-401 (1995).
19. U. Schnell, E. Zimmermann, and R. Dandliker “Absolute distance measurement with synchronously sampled white-light channelled spectrum interferometry,”
Pure Appl. Opt. 4, 643-651 (1995).
20. K. Creath, “Step height measurement using two-wavelength phase-shifting interferometry,” Appl. Opt., 26, 2810-2816 (1987).
21. Z. C. Jian, Y. L. Chen, H. C. Hsieh, P. J. Hsieh, “An optimal condition for the full-field heterodyne interferometers,” Opt.Eng. 46, 115604 (2007).
22. H. C. Hsieh, W. T. Wu, W. Y. Chang, Y. L. Chen, and D. C. Su, “Optimal sampling conditions for a common-used CCD camera in the full-field heterodyne interferometry,” Opt.Eng. 50, 045601 (2011).
23. Z. C. Jian, C. C. Hsu and D. C. Su, “Improved technique for measuring refractive index and thickness of a transparent plate,” Opt. Comm. 226, 135-140 (2003). 24. J. C. Brasunas and G. M. Cushman, “Interferometric but nonspectroscopic
technique for measuring the thickness of a transparent plate Opt. Eng. 34, 2126-2130 (1995).
25. C. H. Liu, S. C. Yeh and H. L. Huang, “Thickness measurement system for transparent plates using dual digital versatile disc (DVD) pickups,” Appl. Opt.,
49, 637-643 (2010).
26. J. Na, H. Y. Choi, E. S. Choi, C. Lee, B. H. Lee, “Self-referenced spectral interferometry for simultaneous measurements of thickness and refractive index,”
Appl. Opt., 48, 2461-2467 (2009).
27. T. Fukano and I. Yamaguchi, “Separation of measurement of the refractive index and the geometrical thickness by use of a wavelength-scanning interferometer with a confocal microscope,” Appl. Opt., 38, 4065-4073 (1999).
28. M. Ohmi, H. Nishi, Y. Konishi, Y. Yamada and M. Haruna, “High-speed simultaneous measurement of refractive index and thickness of transparent plates by low-coherence interferometry and confocal optics,” Meas. Sci. Technol. 15, 1531-1535 (2004).
第二章 外差干涉術
2.1 前言
雷射干涉術已經發展成為一項重要的量測工具,舉凡長度、微小位移的測 量、折射率、表面粗糙度、物體定位與其他精密工程,都廣泛地使用雷射干涉術。 在各種干涉術中,應屬外差干涉術最為重要,因為它具有快速反應、排除雜訊與 克服訊號飄移的能力。從已經發表的一些論文可看出外差干涉術的應用訊息 [1-5]。典型的外差干涉術是指將兩個具有不同頻率的波前互相干涉的技術[6], 將待測的參數引進光的相位之中,再利用相位解析技術取得相位。本章將針對相 位解析方法與外差光源的架設做詳細的說明。首先 2.2 節是外差干涉術的基本原 理。其次 2.3 節是相位解析方法,其中包含了程式範例與提高效率的寫法。2.4 節介紹的是外差光源,說明外差光源的種類,並特別敘述 EO 外差光源的原理與 架設要注意的問題。 外差干涉術應用的領域相當廣泛,例如表面輪廓、粗糙度測量[1,2],物體 微小位移測量[7],小角度量測[8,9],絕對距離測量[10,11],折射率[12-14]、雙折 射率測量[15]以及凡是能夠將相位差引進光學信號的參數都可以用外差干涉術 量測出來。在光電半導體產業中,所用的精密定位系統,就是利用外差干涉術來 完成的。而它之所以被廣泛應用的理由,是因為具有以下幾項優點: 1. 測量精確度高; 2. 可做快速的量測; 3. 避免背景光干擾的影響; 4. 避免光源強度變化的影響。 當外差干涉術應用在不同的量測系統時,會有不同的光學結構加以配合; 例如在位移、表面粗糙度或表面輪廓的方面,大都會架設麥克森(Michelson) 干涉儀或特外曼-格林(Twyman-Green) 干涉儀來測量。在折射率,雙折射率 方面,則以共光程外差干涉術來測量。雖然光學架構也許不盡相同,但都需要一 個共同的外差光源。2.2 外差干涉術的基本原理
光在反射或穿透後皆可能會引入額外相位,然而光的頻率極高,以目前的 科技無法記錄到光的電場震盪,因此也無法直接量測到光的相位項,為了解決這 個問題,一般使用外差干涉術來取得相位。外差干涉術使用兩個具有不同頻率且 頻率差很小的光波其電場形式分別為
1 1exp 1 E t a i t , (2.1) 與
t a
i t
E2 2exp 2 , (2.2) 其中 a1與 a2分別為兩波的振幅,ω1與ω2分別為兩波的角頻率,而為兩波的相 位差。當此二光波完全重疊在一起形成干涉並送入光偵測器,干涉光的強度可表 示為
2 2 2
1 2 1 2 2 1 2cos I t E E a a a a t , (2.3) 其中 ω 為兩光波的角頻率差( 2 1)。由 Eq. (2.3)可知此干涉光為弦波的形 式,且該弦波的角頻率等於,由於很小使得光偵測器能夠清楚的記錄到干涉 光訊號,兩個光波的相位差則被保留在此弦波訊號的相位項裡,我們常稱此弦 波訊號為外差訊號,這種同時具有兩種頻率且頻差很小的光源也被稱為外差光 源,而頻率差則被稱作外差頻率。 若再設法產生一組具有相同角頻率的參考訊號,形式為 0 ( ) (1 cos ) r I t I t , (2.4) 其中 I0為參考光的帄均強度,為弦波的對比度,將此參考訊號與 Eq. (2.3)的測 詴訊號同時送入相位計中作比較,即可得到相位差。對於不同的實驗樣本及系 統架構,將會對應不同相位差,我們便能夠藉由外差干涉術量測出樣本的各項資 訊。2.3 相位解析
要取得兩弦波訊號之間的相位差,需將參考訊號及測詴訊號同時送入相位 計中,再分別解析出兩弦波訊號的相位,兩相位之間差值即為所求。相位計一般 可利用鎖相放大器來解析相位,但有時可能需要對訊號做特殊的處理,必頇改用 資料擷取卡(DAQ)將訊號送入電腦中做相位的解析,或者訊號是以相機取得,一 定得使用電腦做相位解析的情況,我們必頇特別考慮如何進行相位解析。 一般而言,弦波的相位解析方法有兩種:快速傅立葉轉換法(FFT)與最小方 差弦波擬合法(least-squares fit to sine wave data),最小方差弦波擬合法又可細分 為三參數(已知頻率)及四參數(未知頻率)擬合法,這些方法皆能夠精確的擬合弦 波,針對已知單一頻率的弦波訊號進行擬合時,三者所得到的相位幾乎沒有差 別,然而考慮到要減少全場外差干涉術中大量相位解析所耗費的時間,我們通常 使用三參數最小方差弦波擬合法來取得相位。2.3.1 三參數最小方差弦波擬合法
假設有一組弦波訊號包含了 N 個資料點,每個資料點的訊號強度分別為 y1, y2, …, yN,所對應的時間為 t1, t2, …, tN,在沒有誤差的情況下所記錄到的信號強 度可表示為 0cos( ) 0sin( ) 0 n n n y A
t B
t C , (2.5) 然而實際上 yn不可能沒有誤差,使得方差合 S 不為零 2 0 0 0 1 [ cos( ) sin( ) ] N n n n n S y A t B t C
。 (2.6) 為了擬合出一個最接近的弦波,首先以 A0, B0, C0 分 別 對 S 做 一 次 微 分 ,找 出 S 極小值的位置,因此只要將 S A0 0, S B0 0, S C0 0三式聯立, 即可解出極小值的位置 A0, B0, C0。這組聯立方程式的解,即為該組弦波訊號的 最小方差解,用矩陣表示可寫成 1 0 ( 0 0) ( 0 ) T T x D D D y , (2.7)其中 0 0 0 0 A x B C , (2.8) 1 1 2 2 0 cos sin 1 cos sin 1 : : : : : : cos n sin n 1 t t t t D t t , (2.9) 1 2 n y y y y : 。 (2.10) 擬合後的弦波為 ' 0 0 0 0 cos( ) sin( ) cos( ) n n n n y A t B t C A t C
, (2.11) 其中弦波的振幅與相位分別為 2 2 0 0 A A B , (2.12) 1 0 0 tan [ B ] A 。 (2.13) 許多論文中在解相位時常常只寫到這一步是不對的,因為三角函數 tan-1的值域 只在 -/2 ~ /2,為了將相位的值域重新拓展到- ~ ,必頇根據 A0,B0,的正負 號進行判斷,並且把判斷式附在相位算式旁,判斷方法如 Table 2.1。本文提出另 一種相位表示式 2 2 0 0 0 1 0 2 tan A A B B ; (2.14) 此表示式可直接將值域拓展到- ~ ,且計算結果與判斷式的表示法完全相同,可簡潔的表示相位,相當推薦在論文中使用,但需注意應用在電腦程式計算時, 此表示法的處理速度比判斷式的表示法稍微慢一些。其推導過程如下: 改寫 Eq. (2.13)為兩倍 tan-1的形式
1 0 1 0 tan B 2 tan x A , (2.15) 再利用倍角公式轉換 0 2 2 0 2 tan 2 2 tan 1 1 tan 2 B x A x , (2.16) 推得 2 2 0 0 0 0 A A B x B 。 (2.17) 其中 x 只能選相減的解,理由可參考附錄 A,最後即得到 Eq. (2.14)結果。若 想將 的值域拓展為 0 ~ 2 則可參考 Table 2.2。此外,弦波擬合的方均根 (root mean square)誤差為rms S N 。 (2.18) T abl e 2.1 使的 值 域 擴 展 為 。 A0 0 B 0 <0 0 1 0 0 tan ( B ) A 1 0 0 tan ( B ) A >0 1 0 0 tan ( B ) A 1 0 0 tan ( B ) A T abl e 2.2 使的 值 域 擴 展 為 0 2。 A0 0 B 0 <0 0 1 0 0 tan ( B ) A 1 0 0 tan ( B ) A >0 tan (1 B0) 2 A tan (1 B0) A
2.3.2 程式範例與提高效率的寫法
Fig. 2.1 為 Matlab 三參數最小方差弦波擬合範例,使用此程式所得到的 phi 即為該弦波訊號的相位項 (值域為 0~ 360°),若將第 7 行改寫成 x0=D0\y,能夠 大幅減少運算所需的時間。根據 Matlab 的語法說明,右除(„\‟)是用來找出 D0*x0=y 時的解 x0,意義上近似於 x0=inv(D0)*y,然而三參數弦波相位擬合法中所使用 的 D0 通常不為正方形矩陣,因此不存在 D0 的反矩陣 inv(D0),照理執行後應會 出現警告,但是我們在 Matlab 中測詴發現,當 D0 不為正方形矩陣時,x0=D0\y 結果等同於 1 0 ( 0 0) ( 0 ) T T x D D D y ,會有這樣的結果是因為我們系統中的聯立方 程式個數大於未知數之數目,形成了過度確定性系統(overdetermined system),在 這種系統中沒有一個解能夠滿足所有方程式,只能找出一組最佳解,也就是最小 帄方法的解。因此 D0\y 的意義應該更近似於 pinv(D0)*y,因為 pinv 又稱為虛反 矩陣(pseudoinverse),其功能與反矩陣之計算相同,但它會基於 svd 函數(奇異值 分解函數)之計算方式,求得非正方形矩陣之反矩陣。
為使整個系統得到最佳化,也會利用 pinv 指令求得最接近解,故 D0\y、 inv(D0*D0)*D0*y、pinv(D0)*y 三者意義皆相同,但前提是行列式 det(D0*D0) 不能為零,否則 x0 的解會沒有意義,而使用三參數弦波相位擬合法時,只要確 保取樣地時間點 tn至少能取到弦波中三個不同的相位點,使矩陣 D0 的秩 rank(D0)
= 3,det(D0*D0)將保證非零。運算速度方面,因為 D0\y 的寫法 Matlab 已經預 先編譯(compiler)過了,運算速度較 inv(D0*D0)*D0*y 的寫法快上許多,因此在 全場外差干涉術之類必頇多次重複解相位的情況下,建議改用 x0=D0\y 來求解, 以加快相位解析的速度。
2.4 外差光源
產生外差光源較常見的方法有以下幾種:
都普勒效應:利用壓電制動器(Piezoelectric Transducer, PZT)定速推動 Twymann Green 干涉儀其中一臂的反射鏡,使參考光產生都普勒效應,達到移頻的效果, 結合另一臂的反射光即為外差光源,此法產生的頻差通常低於 kHz 等級,裝置 的簡圖如 Fig. 2.2(a)所示。
聲光調變[16-18]:利用聲光調變器(Acousto-Optic Modulator, AOM),使入射光 子與聲子作用後產生移頻的效果,再與移頻前的光源合在一起後即為外差光, 然而 AOM 的移頻量通常為 MHz 等級以上,若想得到低頻的外差光,可將光束 分別穿過兩個具有不同移頻量且頻差較小的 AOM,再重合即可,如 Fig. 2.2(b) 所示。
電光相位調變[19]:當施以電場於電光晶體時,能夠改變晶體的雙折射率,此裝 置稱為電光調制器(Electro-Optic Modulator, EOM)。光線通過此晶體時,兩正交 的偏極光會被引入相位差,適當的控制電壓信號,使相位產生連續變化,就可 以控制兩偏極光的頻差,從而得到具有兩種頻率且偏極方向互相垂直的外差 光,這種對相位調制的電光調制器稱為電光相位調制器,架構的簡圖如 Fig. 2.2(c) 所示;順帶一提,有另一種是組合兩個不同軸向的電光晶體,能夠調制光的振 幅,稱為電光振幅調制器。
Zeeman 雷射[20,21]:Zeeman 雷射為一種常見的雙頻雷射(Two-Frequency Laser),其利用 Zeeman 效應,加磁場於雷射共振腔時,會使激發態的能階分裂,
進而使雷射產生兩個正交且具有不同頻率的偏極光,,一般而言輸出功率低於 1 mW,頻差約為 1~2 MHz。由於它可直接輸出外差光源,使用起來很方便。 此外還有旋轉波片法[22,23]與移動繞射光柵法[24,25]也可產生外差光,但其頻差 受機械轉速限制以及容易引入機械式的震盪,因此只能應用在一些特殊場合。 本實驗室選用電光相位調制的方式來產生外差光源,優點是外差頻率可調 變的範圍極廣,從 0 Hz(直流)到數百 MHz 皆可,能夠搭配不同雷射光源產生外 差光,應用上非常多元,使用方便且穩定性高。利用這種方式產生的外差光源, 稱為 EO 外差光源,下一節中將說明如何利用電光相位調制器產生外差光源。 BS PZT M M Heterodyne Light Laser f0 f0+f f0, f0+f v 0 2v f f c (a) PBS PBS M AOM AOM M Laser f0 f0+f1 f0+f2 f0+f1, f0+f2 (b) Laser EO FG Heterodyne Light P(45゚) f0 f f0, f0+f (c)
2.4.1 EO 外 差 光 源 產 生 原 理
當外加電壓於電光晶體時,其雙折射率與電壓一次方成正比時,稱為一次電 光效應,或 Pockels 效應。一般常用的電光晶體材料有,鈮酸鋰(LiNbO3),ADP (NH4H2PO4),KDP (KH2PO4)等[26,27]。 如 Fig. 2.3 所示,假設 z 軸為光前進方向,y 軸為垂直紙面向上的方向。將 電光晶體 EO 的快軸設定在 x 軸上,且一與 x 軸夾角為 45°的線性偏極光源通過 此 EO 後,x-偏光與 y-偏光之間會有一個相位延遲(phase retardation) Γ 0 V V , (2.19) 其中0為無偏壓初始相位延遲,成因是由於電光晶體在未加電壓之前,已有初 始的雙折射效應;V 是經由波形產生器 FG 加載於 EO 的外加電壓;V則是使 EO 產生 180°相位移所需的電壓,稱為半波電壓。半波電壓與電光晶體(New Focus, Model 4002)各項係數的關係式為[28] 3 e 33 d V n r l (2.20) 其中 l 與 d 分別為晶體的長度與厚度;r33為電光效應係數;ne為非尋常(extra ordinary)折射率;則是入射光波長。由 Eq. (2.20)可知 V與 成正比關係(實際 測詴為線性關係),因此當使用可變波長雷射透過電光晶體調變時,必頇針對不 同波長給予所需的半波電壓,這一點在本論文主要研究的外差式中央條紋法中特 別重要。 EOM Function Generator Linear Polarized Light
Heterodyne Light Source
y z x
V V+Vb -V+Vb Vb t T Fig. 2.4 驅動電光晶體的電壓信號。 當 Γ > 0 時 , 快軸在 x 軸上的電光晶體相位延遲 Jones 矩陣可寫為 2 2 0 0 i i e EO e , (2.21) 若使用波形如 Fig. 2.4 所示的鋸齒狀之電壓信號 V(t) 來驅動此電光晶體, 此鋸齒波的頻率為 f 且振幅為 V ,其數學形式可表示為
b
2V V t t mT V V T , mT t
m1
T, (2.22) 其中 m 為整數,T=1/f 為電壓信號的週期;Vb為鋸齒波的直流偏壓。將此電壓訊 號代入 Eq. (2.19)後,可得到隨時間變化的相位延遲
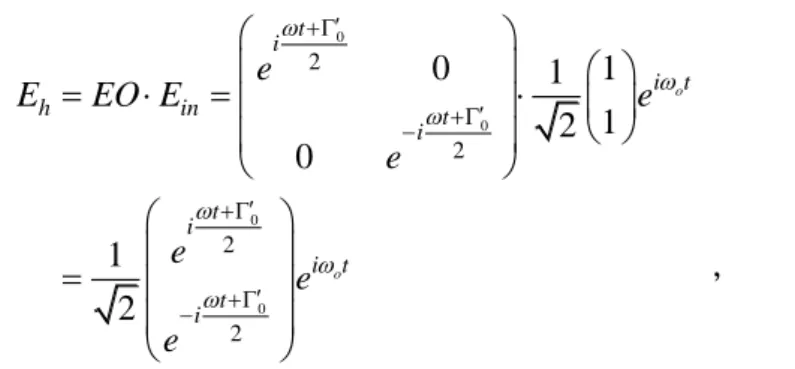
0 2 t t mT T , (2.23) 其中 b 0 0 V V V , (2.24) 0 為 EO 的初始相位延遲,包含了偏壓項與無偏壓項,理論上與時間無關。因此, 此時電光晶體相位延遲的 Jones matrix 可改寫為 0 0 0 0 2 2 2 2 0 0 0 0 t t i i im t t i i e e EO e e e , (2.25) 其中=2f,且第二個等式成立的原因是 Jones matrix 只重視兩個偏極態之間的相對關係。當偏極方向為45 之線性偏光 E in 通過電光晶體後,其電場的 Jones vector 可寫為 0 0 0 0 2 2 2 2 0 1 1 1 2 0 1 2 o o t i i t h in t i t i i t t i e E EO E e e e e e , (2.26) 其中 o 為雷射光源的光頻;明顯地,線性偏光經由電光晶體調制過後,即成 為頻差 相位差 0 的外差光源,可與 Eqs. (2.1), (2.2)比較。調整直流電壓 b V 可以改變初始相位項0,進而使外差光源的相位差變為零,此調製方式常 應用在外差干涉術測量介質的絕對折射率這類系統中[29]。
2.4.2 半波電壓的檢測方法
當對 EOM 加以不同的調制頻率,或針對不同波長的光源使用時,所需的半 波電壓皆不相同,因此廠商所提供的型錄很難清楚指出我們所需的半波電壓是多 少,就算能夠指出,以精密量測的觀點來看,都應該假設他們所提供的規格不準 確。為此我們設計一種簡單的方法來檢測半波電壓。 利用共光程 EO 外差干涉儀,如 Fig. 2.5,改變訊號產生器 FG 輸出的鋸齒波 振幅,觀察相位計 PM 中 Eq. (2.18)的弦波擬合方均根誤差rms為最小時的鋸齒波 振幅,此振幅即為半波電壓。注意相位計每次的總取樣時間至少大於一個弦波週 期,以確保未達半波電壓時所造成弦波波形斷裂的影響會引入rms中。 Laser EOM FG P(45゚)Heterodyne light source
AN(45゚)
PM D
此外可測詴各入射光波長 及調制頻率 f 所對應的半波電壓。對於 New
Focus, Model 4002 這款 EOM 而言,廠商提供的規格中說明該 EOM 的調制深度 (modulation depth) V 0.015radians/volts @ =1060 nm,利用 Eq. (2.20)
可推算出 V= 125.4 V @ = 632.8 nm。然而實際上我們在調制頻率 f = 500Hz 時,測得該 EOM 的 V= 150.0 V @ = 632.8 nm 或是 V= 151.6 V @ = 638.0 nm。此外還發現另一顆同型號 EOM 測得的 V結果皆少 2 V,可能是由於切削 的晶體大小略有差異,因此建議對每顆 EOM 即使是同款式的也要一一測量出所 對應的半波電壓。不正確的半波電壓將會造成額外的相位誤差。
2.4.3 EO 外差光源精確架設的方法
測詴架構如同 Fig. 2.5 ,以 EOM 的快慢軸為實驗室座標方便分析,當偏光 板 P(45°)有P的旋轉角度誤差,即代表入射 EOM 前的入射光電場 Ein需改為Ein cos sin 1 1 ( ) sin cos 2 1 P P in P in P P E R E , (2.27) 若檢偏板 AN(45°)也有A的旋轉角度誤差,因此檢偏板的矩陣 AN 應改為AN ( ) ( )cos sin 1 1 1 cos sin sin cos 2 1 1 sin cos
A A A A A A A A A A AN R AN R 。 (2.28) 而電光晶體調制器的矩陣 EO 如 Eq. (2.26)形式保持不變,因此穿過檢偏板後的電 場為E AN EO E in ,而光偵測器 D 所偵測到的干涉光強度即為 2 0 cos( 0) I E I A t , (2.29) 其中帄均光強度 I0與振幅 A 分別為
0 1 1 sin 2 sin 2 2 A P I , (2.30) 1 cos 2 cos 2 2 A P A , (2.31) 由 Eq. (2.29) 可發現 AN 與 P 的旋轉角度誤差並不會影響外差光的相位項0,只會造成帄均光強度與振幅的改變,而帄均光強度較容易受到背景光的影響,不適 合拿來利用,相較之下干涉光的振幅項便較有利用價值。由 Eq. (2.31)可知 A 的 最大值發生在P與A皆為 0 的時候,因此校準時可以先微調 P 的旋轉角度找到 A 的極大值,將 P 固定後,接著微調 AN 的旋轉角度找到 A 的最大值,此時 EO 外 差光源便正確的架設完成,同時也得到正確的 45°檢偏板。
2.5 小 結
本章中說明了外差干涉術的原理,以及如何利用電腦進行相位解析,並提出程式 範例與提高效率的寫法;在外差光源的架構部份,介紹了各式外差光源,以及本 論文所用之電光晶體調變器的工作原理,並交代如何精確的架設 EO 外差光源。 提供往後相關研究人員能夠快速地了解並應用 EO 外差干涉術。參考文獻
1. G. E. Sommargren, “Optical heterodyne profilometry”, Appl. Opt. 20, 610-618 (1981).
2. D. Pantzer, J. Politch, and L. Ek, “Heterodyne profiling instrument for the angstrom region”, Appl. Opt. 25, 4168-4172 (1986).
3. H. Kikuta, S Asai, H. Yasukochi, and K. Iwata, “Force microscopy using common-path optical-heterodyne interferometer”, Jap. J. Appl. Phys. 130, 587-590 (1991).
4. C. H. Lin, C, Chou, and K. S. Chang, ”Real time interferometric ellipsometry with optical heterodyne and phase lock-in techniques”, Appl. Opt. 29, 5159-5162 (1990).
5. Y. Lin, Z. Zhou, and R. Wang, “Optical heterodyne measurement of the phase retardation of a quarter-wave plate”, Opt. Lett., 13, 553-555 (1988).
6. R. S. Sirohi and M. P. Kothiyal, “Optical components, systems, measurement techniques”, Marcel Dekker, Inc., New York, 219-246 (1992).
7. D.C. Su, M. H. Chiu, and C. D. Chen, “A heterodyne interferometer using an electro-optic modulator for measuring small displacements”, J. Opt. 27, 19-23 (1996).
8. M. H. Chiu and D. C. Su, “Angle measurement using total-internal-reflection heterodyne interferometry”, Opt. Eng. 36, 1750-1753 (1997).
9. M. H. Chiu and D. C. Su, “Improved technique for measuring small angle”, Appl.
Opt. 36, 7104-7106 (1997).
10. H. Kikuta, K. Iwata, and R. Nagata, “Distance measurement by the wavelength shift of laser diode light”, Appl. Opt. 25, 2976-2980 (1986).
heterodyne detection interferometer for absolute distance measurements”, Opt.
Lett. 19, 213-215 (1994).
12. M. H. Chiu, J. Y. Lee, and D. C. Su, “Refractive index measurement based on the effects of the total internal reflection and the uses of the heterodyne interferometry”, Appl. Opt. 36, 2936-2939 (1997).
13. D. C. Su, J. Y. Lee, and M. H. Chiu, “New type of liquid refractometer”, Opt.
Eng. 37, 2795-2797 (1998).
14. J. Y. Lee and D. C. Su, “A method for measuring brewster‟s angle by circularly polarized heterodyne interferometry”, J. Opt. 29, 349-353 (1998).
15. Y. C. Huang, C. Chou, and M. Chang, “Direct measurement of refractive Indices of a linear birefringent retardation plate”, Opt. Commun. 133, 11-16 (1997). 16. M. J. Ehrlich and L. C. Philips, and J. W. Wanger, “Voltage-controlled
acousto-optic phase shifter”, Rev. Sci. Instrum. 59, 2390-2392 (1988).
17. M. G. Gazalet, M. Raveg, F. Haine, C. Bruneel, and E. Bridoux, “Acousto-optic low frequency shifter”, Appl. Opt. 33, 1293-1298 (1994).
18. P. Dirksen, J. V. D. Werf, and W. Bardoel, “Novel two-frequency laser”, Prec.
Eng. 17, 114-116 (1995).
19. D. C. Su, M. H. Chiu, and C. D. Chen, “Simple two frequency laser”, Prec. Eng.
18, 161-163 (1996).
20. H. Takasaki, N. Umeda,and M. Tsukiji, “Stabilized transvere Zeeman laser as a new light soure for optical measurement”, Appl. Opt. 19, 435-441 (1980).
21. N. Umeda, M. Tsukiji, and H. Takasaki, “Stabilized 3He-20Ne transverse Zeeman laser”, Appl. Opt. 19, 442-450 (1980).
22. J. C. Suits, “Magneto-optical rotation and ellipticity measurements with a spinning analyzer”, Rev. Sci. Instrum. 42, 19-22 (1971).
23. M. P. Kothiyal and C. Delisle, “Optical frequency shifter for heterodyne interferometry using counterrotating wave plates”, Opt. Lett. 9, 319-321 (1984). 24. W. H. Stevenson, “Optical frequency shifting by means of a rotating diffraction
grating”, Appl. Opt. 9, 649-652 (1970).
25. T. Suzuki and R. Hioki, “Translation of light frequency by a moving grating”, J.
Opt. Soc. Am. 57, 1551 (1967).
26. H. Takasaki, M. Isobe, T. Masaki, A. Konda, T. Agatasuma, and Y. Watanable, “An automatic retardation meter for automatic polarimetry by means of an ADP polarization modulator”, Appl. Opt. 3, 371-377 (1964).
27. B. H. Billings, “The electro-optic effect in uniaxial crystal of the type XH2PO4. I. Theoretical”, J. Opt. Sci. Am. 39, 127-133 (1949).
28. http://assets.newport.com/webDocuments-EN/images/15207.pdf
29. Y. L. Chen, H. C. Hsieh, W. T. Wu, W. Y. Chang and D. C. Su, “An alternative method for measuring the full-field refractive index of a GRIN lens with normal incidence heterodyne interferometry,” Appl. Opt. 49, 6888-6892 (2010).
附錄 A:弦波的疊加
若以兩個同頻率的弦波相加時,可得到另一個不同振幅、相位但同頻率的 弦波,例如
1 2 3
cos( ) cos( ) cos( )
A t B t C t . (A.1) 想求出 C、3的值可將(1)式展開得到
1 2 3
1 2 3
cos(t) Acos Bcos Ccos sin(t) Asin Bsin Csin 0 進而推得一組聯立方程式,並定義為變數 p,q 以簡化運算
3 1 2
3 1 2
cos cos cos sin sin sin
C A B p C A B q , (A.2) (A.3) 2 2 2 3 tan C p q q p 。 (A.4) 一般常見錯誤的解,是直接將(A3)式改寫為 2 2 1 3 tan C p q q p 。 (A.5) 錯誤在於反三角函數 tan-1的值域只在-90°~90°之間,使得 3的值域不正確,必頇 設法將值域拓展到-180°~180°。常見做法是判斷 p,q 的正負號,將 tan-1加減 180°, 可參考本章 Table 2.1 的判斷式。 然而有另一種算法不用這麼麻煩,方法是設 3 tan 2 x , (A.6) 使得 Eq. (A.4)可改寫為 2 2 2 2 2 1 C p q x q x p , (A.7) 解得
2 2 2 2 C p q p p q x q . (A.8)
為了檢驗 Eq. (A.8)中,x 的兩個解分別對應何種條件,將 x 的解代回 Eq. (A.2)中
2 2 2 2 2 2 2 2 2 2 2 2 1 1 q p p q x C p C C p x p q q p p q . (A.9) 因此得知 2 2 C p q 對應 2 2 p p q x q 的解; 2 2 C p q 對應 2 2 p p q x q 的解。一般較習慣使用 C > 0 的形式,歸納後可得到 1 2 3cos( ) cos( ) cos( )
A t B t C t 2 2 2 2 1 3 1 2 1 2 2 tan cos cos sin sin C p q p p q q p A B q A B . (A.10) 此時3值域為-180°~180°,便能夠合理的表示兩弦波相加的結果。 檢驗:以 Eq. (2.11)為例 ' 0 0 0 0 cos( ) sin( ) cos( ) n n n n y A t B t C A t C
。 (2.11)與 Eq. (A.1)比較,可知1 = 0°, 2 = -90°,將1、2代入 Eq. (A.10)可得到
2 2 0 0 2 2 0 0 0 1 0 2 tan A A B A A B B . 即為 Eq. (2.14)的結果。
第三章 外差干涉術相 位 誤 差 與 取 樣 最 佳 化 設 定
3.1 前 言
外差干涉術,有別於一般強度型量測方法,必頇清楚的考慮光束經過各元件 後所引入的相位與相位誤差。本章將說明各項相位誤差來源及所造成的誤差量, 其中外差光源的部份特別針對 EO 外差光源進行討論,接著以數學模型總合表示 這些誤差對干涉訊號的影響,並利用所提出模擬分析的方法,找出最佳化的參數 設定值。Fig. 3.1 為 EO 外差干涉術常見的架構。3.2 誤差的種類
3.2.1 EO 外差光源相位誤差
(i) 雷射功率不穩定 雷射輸出的光功率不穩定,一般 He-Ne 雷射的光強度穩定度約為1%,而強度穩定型雷射(intensity stabilized laser)[1],一分鐘強度的穩定度(stability)可低於
0.1%,雷射輸出光強度的變化通常是緩慢的漂動,因此當外差頻率約為 1 Hz 等級,或是總取樣時間達 1 秒時,較容易受到這項誤差的影響,但一般而言對相 位影響不大,除了在干涉光對比度很差時不能忽略外(相機取樣較常見),一般還 是都忽略此項誤差。 (ii) EOM 相位調制非線性 Eq. (2.19)中假設 EO 相位變化量對外加電壓為線性關係,然而這只是近似後 的結果,實際上可能會有些許非線性影響,經測詴我們所使用的 EOM,相位對 電壓線性程度很好,擬合後的弦波最小方差合也很小。 各式 干涉儀 檢偏板 參考光偵測器 測詴光偵測器 相位計 Laser EOM FG 偏光板 EO外差光源 Fig. 3.1 EO 外 差 干 涉 術 常 見 架 構 簡 圖 。
(iii) 反應時間誤差 驅動 EO 晶體的外部電壓劇烈變化時(Ex:從高突然掉到低),相位變化需要一 段反應時間(response time),使 EO 外差干涉術干涉後的弦波波形不完美,關係圖 如 Fig. 3.2,調制頻率(外差頻率 f )越高,即週期 T 越短,此反應時間的影響越大; 相對的當我們使用較低的調制頻率時,反應時間影響較小,使得 Fig. 3.2(c)中弦 波斷裂處幾乎只有一小點,雖然只有一小點,但仍有可能造成擬合時的相位誤 差。當弦波取樣頻率較低時(Ex:相機 fs < 1 kHz),不小心取到斷點資料的機率較 低,一般常忽略斷點的影響;然而當取樣頻率較高時(Ex: DAQ 卡 fs > 100 kHz), 較容易取到斷點的資料,並造成些微相位誤差(約 0.1°),為了彌補這個缺陷,可 先對取到的訊號資料進行一次弦波擬合,將擬合後的弦波與原資料點比較,找出 誤差過大的那些資料點(斷點處),將這部份資料點挑除,以擬合後的資料取代, 再進行第二次弦波擬合,如此可降低相位誤差量。這些過程可寫成程式自動移除 斷點並解相位,甚至提示我們是否有過多的資料點被取代,以確保與預測不符的 現象發生後能夠立刻被發現。
V
V
+V
b-V
+V
bV
b 0
0
0
I
t t t Response time T (a) (b) (c) Fig. 3.2 EO 反應時間造成弦波斷點的示意圖。(a)輸入的鋸齒波信號,(b)造成的相位延 遲對時間的變化,其中反應時間的影響有刻意凸顯,(c) 干涉後的弦波波形出現斷點。(iv) 半波電壓不準確 2.4.2 小節中提到半波電壓不準確,會造成相位誤差,其原因為加載在 EOM 上鋸齒波訊號的振幅未達半波電壓時,會使干涉後的弦波訊號出現不連續的現 象,如 Fig. 3.3,此時被分割的每個片段弦波頻率將低於鋸齒波頻率;反之鋸齒 波訊號的振幅超過半波電壓時,被分割的每個片段弦波頻率將高於鋸齒波頻率, 這樣的干涉訊號送入相位計中擬合時,將會造成相位誤差。 (v) EOM 相位熱飄移 2.4.1 小節中提到調整直流電壓 Vb,使外差光源的初始相位0= 0,然而 EO 受到 thermal birefringence 效應的影響,使得的無偏壓初始相位0會隨著室溫 Te
的擾動,如 Fig. 3.4,產生熱漂移(Thermal Drift)的現象,即 0 0( )Te ,因此實
際操作時很難穩定保持0= 0,在測量絕對折射率的 EO 外差干涉儀中必頇設法
解決此問題,通常做法是使用恆溫裝置,並在找到使0= 0 的電壓之後盡快量測
所要測量的樣本,減少相位漂移的程度。這種 EOM 熱漂移的現象也被註明在一 些廠商的型錄中[2],為了降低熱漂移的影響,有人使用兩個相對的 EO 晶體組合 在一起,讓兩晶體的熱漂移現象互相消除,然而這種 EOM 只有強度型的調制(Ex: New Focus, Model 4102),能夠消除熱漂移影響的相位型 EOM 目前還未能在市面 上找到。
Fig. 3.4 溫度對 EO 相位的影響。
(vi) 偏極旋轉誤差[3,4]
偏極旋轉誤差也可稱作二次諧波誤差(second harmonic error)。主要的成因是 在架設干涉儀時,外差光源的兩正交偏極光與實驗室座標有偏移量所致。例如以 z 軸為光前進方向,x 軸為水帄方向,則理想的兩正交偏極光應在 x 與 y 軸的方 向。當兩正交偏極光與 x 或 y 軸有一旋轉角度時,如 Fig. 3.5 所示,x 軸上會出 現兩個頻率不同的偏極分量,y 軸上也會有兩個頻率不同的偏極分量。也就是, s- 與 p-偏光不再是單一頻率了。假設兩正交偏極光與實驗室座標有R偏移量, 則 Eq. (2.26)中的外差光源的光束電場形式可改為 Fig. 3.5 偏極旋轉示意圖。 R x y 2 t i e 2 t i e
t i t i R t i R t i R t i R t i t i t i R R R R o o o o e e e e e e e e E R E 2 2 2 2 2 2 cos sin sin cos 2 1 2 1 cos sin sin cos ; (3.1) 其中 R 為旋轉矩陣。在參考光路中,光線通過穿透軸為45 角的檢偏板 AN 後,r 光的振幅與其強度分別為
i t t i R R t i R R t i t i R t i R t i R t i R o o o e e e e e e e e E E 1 1 sin cos sin cos 2 2 1 cos sin sin cos 2 1 1 1 1 1 2 1 45 AN 2 2 2 2 2 2 r r , (3.2) 與
t
E I R cos 2 cos 1 2 1 2 r r , (3.3) 由此可發現參考信號中交流部分的振幅為 cos2R,而相位項並沒有改變。另一 方面,光線經過測詴系統引進相位差之後,再通過穿透軸為45 角的檢偏板 ANt 後,光的振幅與其強度分別為
i t t i R i R t i R R i t i t i R t i R t i R t i R i o o e e e e e e e e e e e E 1 1 sin cos sin cos 2 2 1 cos sin sin cos 2 1 1 0 0 1 1 1 1 2 1 2 2 2 2 2 2 t , (3.4) 與
t E IRcos sin cos
2 cos 1 2 1 2 2 2 2 t t , (3.5) 其中
2 2 2
1 cos (2 ) cos sin cos cos(2 )
2 tan sin R R , (3.6) 測詴信號相對於參考信號的相位差為,而不是待測系統所引進的相位差,只 有在沒有偏極旋轉的情況下R 0,才會等於。在偏極旋轉存在的情況下, 相位差的誤差量為 R , (3.7) 將 R, 與 R 之間的關係以 Fig. 3.6 來表示,可發現誤差量 R 是一個 週期函數,當相位差 經過一個 2 的週期時,誤差量 R 已經過了兩個 週期,因此,才有二次諧波誤差的稱呼。當偏極旋轉 R 的情況越大時,誤差 量 R 也越大,然而這是在架設系統時,校正與準直的失誤所帶來的,只要細 心的調整各個元件,此項誤差就可減至最低。圖中有一些特別的相位差值,例 如 180,90 與 0 的地方,誤差量為 0,也就是說,若設計一待測系統 使測詴相位差為 0 時,可以有最小的誤差量。 Fig. 3.6 偏極旋轉誤差R、與R之間的關係圖。
3.2.2 基本光學元件相位誤差
(i) 面鏡、分光鏡、偏極分光鏡反射後的相位影響
光經過面鏡、分光鏡(beam splitter, BS)、偏極分光鏡(polarization beam splitter, PBS)反射後,皆會使 s-偏光與 p-偏光之間引入相位差[5,6],原因是光經由金屬反 射或經由介質全反射[7]後會使 s-偏光與 p-偏光的反射係數出現虛數項,也因此 s-偏光與 p-偏光之間產生額外相位差,此相位差與光的入射角以及波長有關[6], 相位變化量可達 20°。外差干涉術中常需設法先量出系統中這些元件所引入的相 位,扣除後才能得到真實樣本引入的相位。事實上這些不該稱為誤差,而是本來 就會引入並且必頇考慮的相位項。 (ii) 應力造成的雙折射現象 結晶物質常伴隨著雙折射(birefringence)現象,只是程度多寡的問題,然而照 一般觀念,玻璃這種非晶(amorphous)材料,幾乎不會有雙折射的問題,但事實上 玻璃遇到應力(strain)時也會出現稍微明顯的雙折射現象,應力的來源可以是玻璃 製造過程中造成的內應力,或是使用夾具施加在玻璃上的外應力。許多元件如偏 光板、衰減片、波片等都會以玻璃作為基板,因此以偏極光入射這些元件後,都 有可能引入額外的相位延遲,並且由於應力分布不均勻,使得元件引入的相位分 布也不均勻;而一些本來就有雙折射現象的晶體,受到應力作用後也會改變其雙 折射率分佈,如電光晶體、晶體式偏極分光鏡與晶體式偏極化鏡等,造成元件引 入的相位分布也不均勻。甚至可能得考慮光學元件表面的抗反射鍍膜是否也會出 現雙折射現象。此問題在全場量測的系統中需特別注意。
3.2.3 干涉儀系統誤差[8]
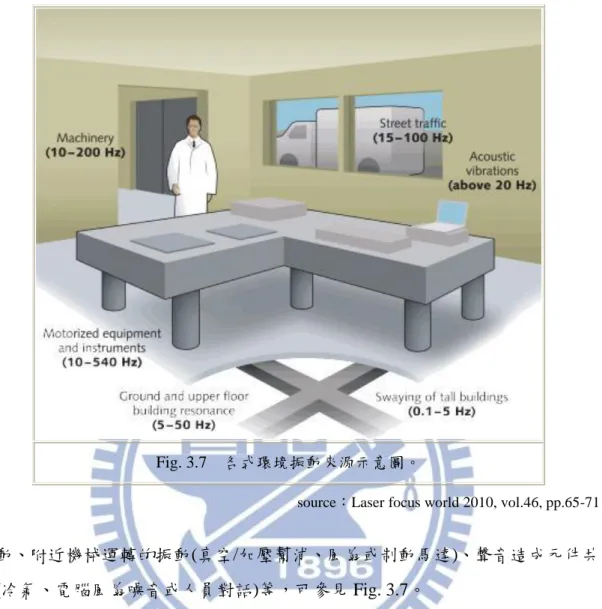
干涉儀系統誤差較複雜,必頇依據不同的干涉儀架構進行針對性的分析,舉 例來說面鏡是否傾斜、分光鏡中兩稜鏡切磨不完美、透鏡擺設位置不準確、入射 光束有些許收斂或發散、環境振動、空氣擾動、元件受熱膨脹等,皆可能引入額 外光程誤差,造成干涉光的相位產生誤差。 而在非共光程干涉儀中,由於使用非共光程架構,特別容易受環境振動影 響,必頇設法抑制環境振動造成的影響。環境振動有許多來源,由外而內列舉如: 附近道路交通或工廠施工的振動、大樓低頻擺動(風吹或電梯昇降)、實驗室人員Fig. 3.7 各式環境振動來源示意圖。
source:Laser focus world 2010, vol.46, pp.65-71 走動、附近機械運轉的振動(真空/加壓幫浦、風扇或制動馬達)、聲音造成元件共 振(冷氣、電腦風扇噪音或人員對話)等,可參見 Fig. 3.7。 抑制環境振動的方法,由易到難列舉如:實驗時關閉實驗區的冷氣機、避免 觸碰實驗帄台、人員不走動、電腦散熱風扇或人員呼吸時避免對著實驗帄台、盡 可能降低光學元件高度以減少振動的振幅、使用更穩定的元件支撐架、縮短干涉 儀兩臂的光程、隔離噪音、減少量測時間以避免低頻振動影響、封閉干涉儀區域 減少空氣對流、購置合適的光學桌抑制振動、實驗室設置於郊區地底下且地面上 無建物。手邊如果有 Newport 型錄的話,可以參考 vibration control 目次中的 technical reference,有不少關於振動抑制的知識。