國 立 交 通 大 學
光 電 工 程 學 系 碩 士 班
碩 士 論 文
電腦全像投影顯示系統研究
Research on Projection Display System Using
Computer Generated Hologram
研究生:許育銘
指導教授:許根玉 教授
電腦全像投影顯示系統研究
Research on Projection Display System Using Computer Generated
Hologram
研究生:許育銘
Student:Yu-Ming Hsu
指導教授:許根玉 教授
Advisor:Ken-Yuh Hsu
國 立 交 通 大 學
光 電 工 程 學 系 碩 士 班
碩士論文
A ThesisSubmitted to Institute of Electrical-Optical Engineering College of Electrical Engineering and Computer Science
National Chiao Tung University in partial Fulfillment of Requirements
for the Degree of Master in
Institute of Electrical-Optical Engineering, June 2014
Hsinchu, Taiwan, Republic of China
電腦全像投影顯示系統研究
學生:許育銘
指導教授:許根玉
國立交通大學光電工程學系碩士班
摘要
本論文探討以空間光調制器顯示電腦全像片之遠場繞射投影成像顯
示技術,並結合紅外光人體感測系統之互動式影像研究。
我們採用對稱式遞迴傅立葉轉換演算法設計純相位電腦全像片,並
經由遠場繞射之傅立葉轉成像。我們以電腦模擬其光學重建影像,以重
建影像之訊雜比及誤碼率為參數分析影像重建品質,並設計光學投影系
統驗證之。我們評估此電腦全像投影系統對於空間光調制器之調制能力
需求限制。最後,結合光學實驗及人體感測儀器,我們以互動式投影系
統演示數字計算。
Research on Projection Display System Using Computer Generated
Hologram
Student:Yu-Ming Hsu Advisor:Ken-Yuh Hsu
Institute of Electrical-Optical Engineering
National Chiao Tung University
ABSTRACT
In this thesis, we discuss the holographic projection display by the use of computer generated hologram (CGH) displayed by spatial light modulator (SLM). With the connection of near-infrared ray human motion sensor, an human-interactive projection system is proposed.
A phase-only CGH, as known as Kinoform, generated by applying symmetric iterative Fourier transform algorithm (SIFTA) which enhances projected image quality is employed for its better diffraction efficiency. We have simulated the reconstruction image by Matlab program. The parameters of signal noise ratio (SNR) and bit error rate (BER) for quantifying the image quality are analyzed. We design an optical setup to verify the simulation results above and the projection image can be found after the distance of Fraunhofer approximation.
Further, We have assessed the impact of LCoS modulation capabilities on diffractive imaging, and concluded the physical restrict of this projection method. Finally, we design
誌謝
兩年一瞬間就過去了。在新竹念碩士班的這段時間,首先是非常感謝許老師的 教導。許老師給了我很多光學上的知識,但相較於課業上的知識,老師更喜歡分享 做人處事的人生道理。記得老師曾說:當下的決定,就是最好的決定。讓我有勇氣 面對各種影響未來的選擇。謝謝老師。 謝謝我的父母支持我自大學以來所作的任何瘋狂事。因為你們給予我的自由以 及重要的經濟支柱,讓我有無限美好的大學及碩士研究生活。謝謝你們讓我有機會 能和人分享我學跳舞的心路歷程還有第一次出國就當美國背包客的冒險心得。 謝謝爸,你總在我開口的時候對我抱持信任,並不計辛勞的為我在新竹、中壢、 台北間奔波。謝謝媽在我每次回家都和我聊天分享心情,和媽說心事的感覺讓我感 到很紓壓。天下的媽媽好像都有能力找回兒子不見的任何東西,謝謝妳在我每次感 到困惑的時候願意幫助我找回我的初衷。另外我要謝謝阿嬤,阿嬤私底下對我很好, 從我三歲到碩士畢業,都堅持偷偷塞一張一百塊給我去買餅乾或便當。想跟我阿嬤 說:阮畢業啦,阿嬤欸凍提錢去買恁想袂買欸囉,望哩欸凍跨丟阮娶某生子,擱予 哩曾孫來甲恁友孝。 謝謝大學同學,我會永遠記住大家聚在一起的歡笑聲。David、阿超、小綠、喇 機、小瑞,研究所考試的羈絆把我們幾個連結在一起。往後大家將走向不同的道路, 可以確定的是,只要說一聲大家就是有辦法團聚,再分享彼此經歷的酸甜苦辣。友 誼萬歲! 謝謝在交大認識的朋友們。謝謝仁崇給了我很多研究的建議,沒有你這篇論文 就不會這麼順利完成。口試前一天還好有你聽我口試預演,謝謝你的幫忙。Vera, I am indeed grateful for your trust in me. You are the key to my confidence in my work. 謝謝 呂哲宇學弟給了實驗室很多歡笑,有時釘你是真心希望你變好,考上碩士班要加油, 繼續朝著夢想前進。謝謝黃怡芯,妳面對未來的態度值得我去學習,感謝妳在軟體 方面的幫忙。謝謝周信甫,我們是一起打拼研究的夥伴,也謝謝你對我的誇獎。謝 謝童仲帆總是幫實驗室處理很多大大小小的事。謝謝卓學長推薦的好吃便當。謝謝 紀政宏,我永遠記得我們的夢想,能夠出國交換真的很棒很厲害。 謝謝中央熱舞還有 Hakuna Matata 的團員,庸庸碌碌的研究生活可以跳舞真的很開心。 最後,由衷地感謝我的女朋友郭靜汶,與妳走過的路、經歷的回憶無可取代。 是妳給了我許多正面能量,讓我得以完成碩士學業。妳總是不管自己是否忙碌,逕 自為我分析對未來的各種決策;不管我最後決定如何,妳也全心地支持。妳的支持 正是我前進最大的動力。感謝這四年來的相互扶持,妳對我的好我都放在心上。 三言兩語道不盡許多感謝情,最後謹以此篇論文獻給我的家人、靜汶、以及我 的好友們。 2014/07/01 於田家炳光電大樓 217 室 許育銘 謹誌
目錄
摘要 ... I ABSTRACT ... II 誌謝 ... III 目錄 ... V 圖目錄 ... VII 表目錄 ... X 第 1 章 緒論 ... 1 1.1 動機:未來手機之夢想 ... 1 1.2 電腦全像片簡介 ... 3 1.3 電腦全像投影顯示系統簡介 ... 4 1.3.1 投影顯示系統簡介 ... 4 1.3.2 電腦全像投影顯示系統 ... 4 1.4 論文架構 ... 6 第 2 章 投影鍵盤之電腦全像片設計及模擬分析 ... 7 2.1 相位電腦全像片之設計 ... 7 2.1.1 Kinoform 純相位式電腦全像片 ... 7 2.1.2 SIFTA 對稱遞迴傅立葉轉換演算法 ... 8 2.2 光學投影鍵盤之成像模擬 ... 13 2.2.1 遠場繞射理論 ... 13 2.2.2 SLM 遠場繞射成像 ... 15 2.3 鍵盤影像及光學成像系統設計 ... 19 2.3.1 鍵盤影像設計 ... 20 2.3.2 投影系統設計 ... 22 2.4 電腦全像片參數分析 ... 24 2.4.1 方均根誤差值 ... 24 2.4.2 遞迴圈數影響 ... 25 2.4.3 相位取樣影響 ... 27 第 3 章 矽基液晶顯示器相位調製特性量測 ... 30 3.1 LCoS 顯示器簡介 ... 30 3.2 向列扭轉型液晶光學特性 ... 31 3.3 LCoS 相位及振幅調制特性之模擬分析 ... 32 3.4 LCoS 相位及振幅調制實驗測量結果 ... 39 第 4 章 光學鍵盤投影實驗及分析 ... 49 4.1 光學實驗架構 ... 494.2 光學繞射成像實驗 ... 51 4.2.1 數字鍵盤之光學成像 ... 51 4.2.2 繞射效率分析 ... 54 4.3 LCoS 調制參數分析 ... 55 4.3.1 振幅調制能力不足 ... 55 4.3.2 相位調制能力不足 ... 60 第 5 章 人機互動系統實驗 ... 64 5.1 人體動作感測儀器簡介 ... 64 5.2 體感儀器 Leap Motion 之紅外光感測設計 ... 66 5.3 投影鍵盤操作實驗 ... 68 5.3.1 影像資訊處理 ... 68 5.3.2 計算機操作實驗結果 ... 69 第 6 章 電腦全像片之影像誤碼率評估 ... 72 6.1 雲端運算帶動之資訊儲存系統革新 ... 72 6.2 USB 系統、BD 光儲存與全像儲存系統表現參數比較 ... 73 6.3 電腦全像儲存系統 ... 74 6.3.1 電腦全像儲存系統簡介 ... 74 6.3.2 機率分布函數與誤碼率 ... 75 6.4 演算法參數之誤碼率比較 ... 77 6.4.1 遞迴圈數影響 ... 79 6.4.2 相位階數影響 ... 82 第 7 章 結論及未來工作 ... 83 參考文獻 ... 85
圖目錄
圖 1 智慧型手機及傳統手機使用者市場調查 ... 1 圖 2 未來手機概念示意圖 ... 2 圖 3 投影鍵盤概念示意圖 ... 3 圖 4D.GABOR全像術實驗結果 (A) 物體, 直徑 1.4 MM.(B) 直接觀看顯微鏡下之物體 (C) 干涉圖樣 (D) 重建物體影像 ... 3 圖 5 電腦全像投影顯示系統示意圖 ... 5 圖 6 電影「鋼鐵人 2」之元素週期表投影 ... 5 圖 7 欲投影之數字鍵盤,畫素大小為300 × 300 ... 7 圖 8 捨去振幅資訊且相位數位化後 KINOFORM重建鍵盤影像 ... 8 圖 9IFTA 空間關係流程圖 ... 10 圖 10SIFTA 目標影像之訊號區及雜訊區 ... 11 圖 11IFTA 與 SIFTA 影像品質比較 ... 12 圖 12 繞射孔徑示意圖 ... 13 圖 13SLM 畫素分佈示意圖 ... 15 圖 14 光學重建鍵盤影像 ... 18 圖 15SINC函數處理影像(A).處理前(B).處理後 ... 20 圖 16SINC修正之光學重建鍵盤影像 (A).修正前(B).修正後 ... 21 圖 17SIFTA 之目標影像設計(SINC修正後) ... 21 圖 18SIFTA 光學重建影像(SINC修正後) ... 22 圖 19 光學系統設計概念 ... 23 圖 20RMSE 對迴圈數作圖 ... 26 圖 21RMSE 對相位階數作圖 ... 28 圖 22LCOS 分層結構圖 ... 30 圖 23LC-R2500 空間光調制器 (含控制器及顯示器) ... 30 圖 24 正負型液晶分子外加電壓示意圖(A)液晶分子 (B)外加電壓偏轉示意圖 ... 31 圖 25 45°向列扭轉液晶盒示意圖 ... 32 圖 26SLM 系統光軸等效光路圖 ... 34 圖 27TNLC 外加電場之液晶分子導向(A).TN-LC 於外加電場下之液晶倒向(B).液晶 分子外加電場偏轉示意圖 ... 37 圖 28 振幅及相位調制模擬圖 ... 39 圖 29 相位調制實驗光學系統架構 ... 40 圖 30LCOS 未加電壓之同心圓干涉條紋 ... 42 圖 31LCOS 凸反射面示意圖 ... 42 圖 32CCD 擷取 LCOS 未加電壓之平行干涉條紋影像... 42圖 33 輸入灰階 100 之干涉條紋影像 ... 43 圖 34 干涉條紋截線之光強分佈及條紋位移 ... 43 圖 35 輸入灰階 100 之干涉條紋影像(水平方向低通處理) ... 44 圖 36 干涉條紋截線之光強分佈及條紋位移(水平方向低通處理) ... 44 圖 37 相位調制實驗結果 ... 46 圖 38 振幅及相位調制實驗結果(偏振角:75°,檢偏角:116°) ... 47 圖 39 振幅及相位調制實驗結果(偏振角:80°,檢偏角:85°) ... 48 圖 40 傅立葉成像系統 ... 49 圖 41 傅立葉成像投影系統 ... 50 圖 42SIFTA 之目標影像設計(SINC修正後) ... 52 圖 43SIFTA 計算之電腦全像片 ... 52 圖 44 電腦模擬之光學重建影像 ... 53 圖 45 成像投影系統之光學重建影像 ... 53 圖 46 濾除 DC 亮點及多階繞射之鍵盤影像 ... 54 圖 47SLM 系統調制振幅亂數區間 0 至 1 之 CGH 光學重建影像 ... 56 圖 48SLM 系統完美振幅調制之 CGH 光學重建影像 ... 56 圖 49 不同 SLM 系統之振幅與相位調制能力圖表 ... 59 圖 50 理論及實際相位調制圖 ... 60 圖 51SLM 畫素相位飽和誤差示意圖 ... 61 圖 52(A).傳統搖桿控制器(B).WII之手把控制器主機(圖右)及其手把控制器(圖左) .... 64 圖 53 微軟公司體感儀器 KINECT ... 65 圖 54 華碩公司體感儀器 XTION ... 65 圖 55XTION感測紅外影像 (圖右)及深度資訊(圖左) ... 65 圖 56LEAP MOTION體感儀器及其內部結構圖 ... 66 圖 57LEAP MOTION最佳感測範圍及儀器尺寸 ... 66 圖 58 成像面之壓克力架設計屏幕 ... 67 圖 59 加入 LEAP MOTION體感儀器之光學系統架構 ... 68 圖 60 簡單計算機之光學影像重建(A)簡單計算機影像(B)光學重建計算機影像 ... 68 圖 61 未來用戶端與資料中心端關係示意圖 ... 72 圖 62 二元資訊頁面(10 × 10)示意圖 ... 75 圖 63 二元資訊頁面(10 × 10)IFTA 重建影像 ... 75 圖 64 二元資訊影像之機率分布函數 PDF ... 75 圖 65 以 IFTA 計算之電腦全像片計算其重建影像之機率分布函數 ... 76 圖 66 判斷灰階閥值之二元影像比較圖 (A)原始二元影像(B)閥值判斷前重建影像(C) 閥值判斷後重建影像 ... 77 圖 67 畫素大小600 × 600之二元影像 ... 78 圖 68 二元影像之 IFTA 電腦全像重建影像比較(A).遞迴 4 圈 (B).遞迴 100 圈 ... 78
圖 70PDF 圖與 IFTA 迴圈數之關係 ... 80 圖 71PDF 圖與 SIFTA 迴圈數之關係 ... 81
表目錄
表 1SIFTA 之目標影像在不同空間中的自由度 ... 10 表 2SIFTA 設計不同迴圈數之電腦模擬重建影像 ... 27 表 3SIFTA 設計不同相位階數之電腦模擬重建影像 ... 29 表 4HOLOEYELC-R2500 規格表 ... 31 表 5 常見光學元件之瓊式矩陣表示式 ... 34 表 6 透鏡組別之各項投影參數 ... 51 表 7 理論及實驗繞射效率 ... 54 表 8SLM 系統不同振幅調制能力對應 CGH 重建影像及 SNR 比較 ... 57 表 9 振幅調制能力數據及光學重建影像實驗結果 ... 59 表 10SLM 系統不同相位調制能力對應 CGH 重建影像及 SNR 比較 ... 62 表 11 相位調制能力數據及光學重建影像實驗結果 ... 63 表 12 不同影像解析度之 SIFTA 演算法所需時間表 ... 69 表 131+2=3 之算術運算流程表 ... 70 表 143+4=7 之算術運算流程表 ... 71 表 15USB 不同版本性能比較 ... 74 表 16 不同資訊儲存方式表現參數比較 ... 74 表 17IFTA 遞迴圈數與誤碼率關係表 ... 80 表 18BER 值與 SIFTA 迴圈數之關係 ... 81 表 19IFTA 與 SIFTA 計算之電腦全像片相位取樣階數與誤碼率之關係 ... 82第 1 章 緒論
1.1 動機:未來手機之夢想
自從 2007 年 1 月 9 日蘋果公司 CEO 史蒂夫∙賈伯斯發表了第一代 iphone 後,世 人掀起了一股智慧型手機的熱潮。智慧型手機結合了傳統手機的通話功能以及多點 觸控技術。此外,透過 Wi-Fi 或 3G 網路,智慧型手機使用者可以順暢地瀏覽網頁 就如同使用個人電腦一般,更可以藉由不同行動作業系統之網路商店擴充更多應用 程式 app 增加手機功能性。 根據市場調查公司尼爾森於 2012 年所提出的報告(見圖 1)指出,近年來美國智 慧型手機使用者的數量成長迅速,且於 2012 年的二月與傳統手機之使用者數量達到 交叉點,證實了手機市場的轉變。 圖 1 智慧型手機及傳統手機使用者市場調查 (資料來源:http://www.hksilicon.com/kb/articles/64798/iOSampampAndroid) 智慧型手機的崛起,連帶促進觸控式系統的發展。在智慧型手機被發明以前, 觸控式系統只應用於一些簡單的指令,例如:「確認」、「取消」等僅需要單點觸控輸 入指令即可。隨著智慧型手機及觸控螢幕的發明,多點觸控的技術被引入,以應付 各種複雜的指令,例如:「縮放頁面」、「滑動頁面」、「旋轉頁面」等。上述之智慧型手機觸控系統之感測技術皆以電路設計為基礎,主要分為電阻式、電容式兩種,藉 由人體觸碰螢幕時所造成的壓力改變電阻值或者電容值,判斷觸碰位置。 在目前主流的觸控系統研究之中,唯有紅外線偵測系統,藉由接收人體輻射的 紅外線判定觸控位置。其優點是不需要將觸控電路設於面板之中。然而,缺點是其 感測過程較容易被干擾或是產生誤判。 隨著科技的進步,未來手機的趨勢概括來說有以下方向:1.透明顯示面板。2. 可撓式顯示面板。兩種方式對 IC 設計或者面板材料來說無疑都是很艱難的挑戰。以 下舉例數張未來手機之概念圖做為未來世界行動裝置之想像:
從幾張圖可以發現,顯示技術將是未來手機的一大研究重點。本論文中,我們 將以可操作投影鍵盤作為互動式投影系統之構想,結合電腦全像投影系統以及紅外 線人體感測系統,以未來手機投影鍵盤作為目標並證實互動式投影影像可行性,投 影鍵盤概念如圖 3 示意,下一節我們將簡介電腦全像技術: 圖 3 投影鍵盤概念示意圖
1.2 電腦全像片簡介
1948 年,英國籍匈牙利裔物理學家 Denis Gabor 提出了一種波前重建的方法[1], 試圖改善當時電子顯微鏡之解析力。為證實其重建波前之可行性,Gabor 以同軸的 方式設計光路,使平面波照射幾乎透明之物體,部分的光波照射物體後產生散射, 稱為物體光,部分的光波則直線前進,稱為參考光。將底片置於兩束同調光波之干 涉區紀錄干涉條紋。藉由條紋週期與兩束光相位差相關之特性,紀錄了物體光之相 位資訊。以原參考光照射記有條紋之底片後,繞射光將重建出物體光之相位,還原 原物體之樣貌,而後稱此方法為全像術。 圖 4 D. Gabor 全像術實驗結果 (a) 物體, 直徑 1.4 mm. (b) 直接觀看顯微鏡下之物 體(c) 干涉圖樣 (d) 重建物體影像全像術能夠以干涉的方式完整記錄物體之光場資訊,但須注意的是,光學干涉 對外界環境干擾極為敏感,紀錄時必須避免震動以及空氣擾動使得干涉條紋位移, 以免降低底片紀錄條紋之明晰度。
1966 年,B.R. Brown 以及 A. W. Lohmann 發明了一種不需要光學干涉紀錄的電 腦全像片,所用的方法為「相位繞道法(Detour Phase Method)」[2][3]。先求出由物 體發出至全像片之複數光場,接著將振幅資訊以及相位資訊編碼成二元振幅影像(黑 白),藉由入射光之斜向入射角度以及某一畫素之開孔位置決定出射光調制之相位值, 藉由開孔的大小決定出射光所調制之振幅值。 此後,電腦全像片的編碼方法不斷地推陳出新,如:Kinoform 相位電腦全像片 [4]、雙相位合成法[5]、改良型雙相位合成法[6]等。不管何種編碼方法,電腦全像片 皆無光學干涉過程,僅需電腦計算、編碼後製作即可。相較於傳統全像片干涉紀錄, 電腦全像片的製作流程更為方便,適合應用於設計不同功能之全像光學元件
(Holographic Optical Element,簡稱 HOE)。若以可動態顯示之空間光調制器(Spatial Light Modulator,簡稱 SLM)作為媒介播放電腦全像片,將可用做動態光學元件。電 腦全像在目前已有許多應用如:全像 3D 顯示[7][8][9]、複合式全像[10]、影像處理 [11]、動態顯微術[12]等。
1.3 電腦全像投影顯示系統簡介
1.3.1
投影顯示系統簡介
所謂的投影顯示,指的係利用光源照射某物體,物體之反射或者透射光經由透 鏡成像系統,將物體實像成像至屏幕。投影顯示系統則是由光源、顯示欲投影影像 之 SLM、成像系統及屏幕構成。 常用的 SLM 有以下幾種: 1.穿透式液晶顯示器 LCD 2.反射式矽基液晶顯示器 LCoS 3.數位微型反射鏡 DMD 市面上的投影機,除了上述投影系統外,更以 IC 電路板連結了電腦,讓投影影 像可以與電腦螢幕同步達到動態顯示的效果。早期結合電腦的三槍投影機,以三個 光源分別照射 RGB 三種顏色的影像並在屏幕疊合呈現彩色影像。現今常見的投影 機為單槍投影機,藉由數位光處理(Digital Light Processing)的方式,以單光源將 SLM 放大實像成像至屏幕之中,且由於光學設計技術的進步使透鏡成像系統像差影響亦 愈趨漸小。1.3.2
電腦全像投影顯示系統
電腦全像投影顯示,指的係以 SLM 顯示電腦全像片,並由重建光波入射 SLM 重建影像,繞射光在屏幕上成像。
成像透鏡將實像放大至屏幕;後者 SLM 顯示電腦全像片,由繞射光在屏幕上成像。 電腦全像的優點為其保留了全像最重要的特性:資訊分佈於全像片任一處。因此若 電腦全像有任一位置破損,或者某些畫素無法顯示,將不會影響投影影像的判讀。 本論文所設計之電腦全像片,其概念是將欲投影之影像執行傅立葉轉換影像得 到。我們利用函數執行傅立葉轉換兩次後,將得到與原函數相同、座標相反之特性, 以 SLM 顯示影像第一次傅立葉轉換的結果,並於其後滿足遠場繞射條件之距離下 擺放屏幕,將得到第二次傅立葉轉換的結果,也就是原影像,電腦全像投影系統如 圖 5 所示。更詳細的編碼方法及投影成像性質,將於第二章詳細介紹。 圖 5 電腦全像投影顯示系統示意圖 也許在不久的將來,電影世界中由電腦特效製作出立體投影的效果(見圖 6)便可 能以電腦全像投影技術成真。 圖 6 電影「鋼鐵人 2」之元素週期表投影 (資料來源:https://www.youtube.com/watch?v=mbj3XSvDyw8)
1.4 論文架構
第一章簡介電腦全像片以及電腦全像投影顯示系統之概念。第二章研究電腦全 像片的產生方式、以理論推導分析成像性質並且以電腦模擬光學重建影像,根據遠 場繞射成像特性設計一成像投影系統。第三章介紹用於顯示電腦全像片之反射式矽 基液晶顯示器 LCoS 的原理,接著模擬其光學調制性質,並且設計實驗量測其調制 能力。第四章實際設計光學實驗架構,展示光學投影影像成果並且分析成像品質, 接著以模擬探討 LCoS 調制能力若不如預期將對投影成像造成之影響,並設計實驗 的方式驗證模擬結果。第五章簡介人體感測儀器,並將其加入光學實驗架構之中展 示影像互動成果。第六章討論數位二元影像以此方法儲存下,其光學重建影像之誤 碼率分析,作為本論文所提出之電腦全像方法在全像資訊儲存上之延伸應用。第七 章為結論及未來工作。第 2 章 投影鍵盤之電腦全像片設計及模擬分析
在本章中,我們設計鍵盤影像如圖 7 所示,並以對稱遞迴傅立葉轉換演算法設 計電腦全像片。接著,根據傅立葉光學理論,以電腦模擬 SLM 顯示電腦全像片之 光學重建影像。透過模擬重建影像,我們可知遠場繞射投影之影像限制,進而重新 設計製作電腦全像的目標鍵盤影像。最後,根據設計好的影像製作新的電腦全像片, 模擬並比較設計前後的重建影像差異。在最後一節,我們比較演算法之不同參數對 投影成像的影響。 圖 7 欲投影之數字鍵盤,畫素大小為300 × 3002.1 相位電腦全像片之設計
在 2.1 節中,我們將介紹 Kinoform 電腦全像片,以及 Kinoform 的產生方法—對 稱遞迴傅立葉轉換演算法。2.1.1
Kinoform 純相位式電腦全像片
我們的投影系統所採用的電腦全像片為純相位式的電腦全像片。假設一函數 𝑓(𝑥, 𝑦) = 𝑎(𝑥, 𝑦) (1) 其傅立葉轉換 ℱ(𝑓(𝑥, 𝑦)) = 𝐴(𝑥′, 𝑦′)𝑒𝑖𝜃(𝑥′,𝑦′) (2) 若將其再作一次傅立葉轉換,則可得到ℱ[𝐴(𝑥′, 𝑦′)𝑒𝑖𝜃(𝑥′,𝑦′)] = 𝑎(−𝑥, −𝑦) (3) 上述的數學運算,在傅氏光學中可解讀成:一影像函數經過傅立葉轉換後的傅 氏影像,可再經由一次傅氏轉換得到原來的影像,不同之處只有影像象限正負互換, 也就是影像將上下顛倒左右相反。 值得注意的是,影像經過傅氏轉換後,傅氏空間的複數係數之中包含振幅係數𝐴 以及相位係數𝑒i𝜃。然而,我們很難找到一空間光調制器,使其穿透函數可以同時準 確地調制光的振幅以及相位。一般認為,相對於振幅係數,相位係數存有較多原本 的影像資訊,基於此假設,Kinoform 捨棄了振幅係數,保留了相位資訊,並用相位 全像材料記錄下此資訊。由於 Kinoform 電腦全像片只有相位分佈,因此不會吸收入 射光的強度而不會浪費能量。換句話說,和傳統全像一樣,純相位式的電腦全像片 繞射效率較振幅式高。 由於捨棄掉 Kinoform 振幅係數,部分影像資訊將流失。此外,使用電腦計算離 散傅立葉轉換,必須將相位數位化。這些過程都將導致 Kinoform 電腦全像片重建影 像對比度及訊雜比下降,圖 8 所示為 Kinoform 之重建影像,因此我們必須尋求演算 法來增進影像品質。 圖 8 捨去振幅資訊且相位數位化後 Kinoform 重建鍵盤影像 在遠場繞射影像為純相位式電腦全像片之傅立葉轉換的前提下,基於 Gerchberg-Saxton 演算法[13]所延伸的對稱遞迴傅立葉轉換演算法(Symmetric Iterative Fourier Transform Algorithm,以下我們以 SIFTA 簡稱之。[14])適用於我們的 投影系統,以下我們將介紹此演算法的操作原理。
2.1.2
SIFTA 對稱遞迴傅立葉轉換演算法
在介紹對稱遞迴傅立葉轉換演算法前,先介紹一下其前身:遞迴傅立葉轉換演 算法(簡稱 IFTA[15])。此演算法的原理,是讓影像函數在影像空間以及傅氏空間中 來回遞迴並且作修正,使重建影像函數越來越接近目標影像函數。而演算法遞迴的
說,我們希望在影像空間的振幅能夠與原來影像相同,因此以原來影像振幅分佈作 為影像空間之振幅限制;我們希望傅氏空間的振幅能夠均勻歸一,因此就以 1 作為 傅氏空間之振幅限制。 換個方式來說,我們的 Kinoform 電腦全像片,藉由此演算法遞迴的方式,將存 在於振幅係數中的影像資訊加入相位係數中,使得純相位的電腦全像片能夠有更好 的重建影像品質。 以下為 IFTA 詳細流程介紹: 1. 選定目標影像:𝑓(x, y) = a𝑛,n 表示第 n 個畫素。 2. 設定影像空間及傅氏空間的振幅限制: 影像空間:a𝑛 傅氏空間:1 ───────────────────IFTA 遞迴開始─────────────────── 3. 在傅氏空間中產生一個亂數相位分佈:𝑟𝑛 = 𝑒𝑖𝜃𝑛 4. 將此相位矩陣做反離散傅立葉轉換(IDFT)得到影像: 𝑓𝑛,𝐾= |𝐴𝑛,𝐾|𝑒𝑖𝛼𝑛.𝐾,其中 K 表示第 K 次遞迴。 5. 代入影像空間振幅限制,得到修正影像:𝑓𝑛,𝐾′ = a𝑛𝑒𝑖𝛼𝑛.𝐾 6. 將修正影像作離散傅立葉轉換(DFT),得到傅氏係數𝑅𝑛,𝐾 = |𝑅𝑛,𝐾|𝑒(𝑖∅𝑛,𝐾) 7. 代入傅氏空間振幅限制,得到電腦全像片:𝐶𝐺𝐻𝐾 = 𝑒(𝑖∅𝑛,𝐾) 8. 將電腦全相片做 IDFT,得到重建影像𝑓𝑛,𝐾+1 = |𝐴𝑛,𝐾+1|𝑒𝑖𝛼𝑛.𝐾+1 此時我們將重建影像|𝐴𝑛,𝐾+1|與原來影像a𝑛做比較,當誤差值已收斂,則停止迴 圈;若否,則繼續遞迴,重複第 5 步驟代入影像空間振幅限制,得到修正影像: 𝑓𝑛,𝐾+1′ = a𝑛𝑒𝑖𝛼𝑛.𝐾+1。 9. 重複第 6 步驟,持續迴圈。直到重建影像與原來影像誤差值收斂,停止迴圈。 ───────────────────IFTA 遞迴結束─────────────────── 10. 此時傅氏空間的𝐶𝐺𝐻𝐾即為我們所要的 Kinoform 電腦全像片。 以上即為 IFTA 的詳細流程。實際上我們使用電腦以 Matlab 矩陣數學模擬軟體 去做此演算法的計算。 另外,上述流程中,可以注意到遞迴傅立葉轉換演算法除了增進影像品質外, 還可以為我們達成兩個目的: 第一,由第 10 步驟可知,可以得到我們所需要的 Kinoform 電腦全像片。 第二,由第 8 步驟可知,可以得到該電腦全像片的模擬重建影像。 演算法的這兩個步驟,讓我們可以隨時監控重建影像,並且可以藉由模擬重建 影像,比較遞迴前後的影像品質。
圖 9 IFTA 空間關係流程圖 介紹完詳細流程,我們以圖 9 表示 IFTA 的空間關係演算流程。從 IFTA 的流程 裡可以發現,在遞迴的過程中,不管是影像空間還是傅立葉空間,我們都不處理函 數的相位,我們稱此演算法有「相位自由度」。而正是此相位自由特性使得演算法能 夠改進影像品質。 介紹完 IFTA,回到我們使用的對稱遞迴傅立葉演算法 SIFTA。
SIFTA 與 IFTA 基本上流程圖相同,最大的不同處有二,其一是根據 IFTA 的相 位自由度特性,SIFTA 欲在影像空間部分加上振幅自由度,而所謂的振幅自由度, 意思就是在遞迴的過程中不加上振幅限制,讓函數反覆迭代後能使重建影像比 IFTA 的運算結果更趨近於原來影像。 為了達到上述目的,用於 SIFTA 的目標影像被分成兩部分區域,一部分是訊號 區、另一部份的是雜訊區。對於訊號區,我們如同 IFTA 給予振幅限制,繼續迴圈; 對於雜訊區,我們不給予振幅限制,保留振幅及相位,繼續迴圈。以下,我們用一 個簡單的表格來表示訊號區以及雜訊區不同空間中的自由度: SIFTA 影像空間 傅氏空間 影像訊號區 振幅限制、相位自由 振幅限制、相位自由 影像雜訊區 振幅自由、相位自由 振幅限制、相位自由 表 1 SIFTA 之目標影像在不同空間中的自由度 我們設計目標鍵盤影像如圖 10 所示。我們給予訊號區代號 S,雜訊區代號 N, 訊號區及雜訊區的選定並不是唯一,也沒有一定比例關係。從圖 10 中可以發現,我
詳細原因我們將在 2.3 節解釋。 圖 10 SIFTA 目標影像之訊號區及雜訊區 第二個不同之處,則是在影像空間中的振幅限制函數。SIFTA 的振幅限制,想 法是希望能將每次遞迴之中,重建影像強度比原始影像低的部分加強;強度比原始 影像高的部分減弱,就像以原始影像的強度當作對稱軸,將重建影像強度調整得更 接近原始影像,再進行下一次的迴圈,也因此稱作對稱式遞迴傅立葉演算法。下式 即為 SIFTA 中的振幅限制: {{2𝑐|𝑓| − |𝑓𝑛,𝐾|}𝑒 𝑖𝛼𝑛,𝐾, 𝑛 ∈ 𝑆 |𝑓𝑛,𝐾|𝑒𝑖𝛼𝑛,𝐾, 𝑛 ∈ 𝑁 (4) 其中, c = ∑ 𝑓𝑛,𝐾 ∑ 𝑓 , 𝑛 ∈ 𝑆 (5) 舉例來說,假設以圖 7 之目標影像以 IFTA 及 SIFTA 增進重建影像品質,並設 定迴圈次數 150 圈及相位階數 200 階後,計算出 Kinoform 電腦全像片,並以電腦重 建影像,結果如下圖 11(a)(b)所示。由於我們擴增了原來的鍵盤影像,增加了雜訊區 的部分,使得目標影像解析度(600 × 600)變成鍵盤影像解析度(300 × 300)的兩倍, 因此電腦全像片以及重建影像的解析度大小也將是原來鍵盤影像的兩倍(600 × 600)。另外,從圖 11 中可以發現,SIFTA 重建影像在訊號區的對比度較 IFTA 重建 影像高,訊雜比也較高,然而相對的 SIFTA 影像有些許能量散落在雜訊區。但我們 注重的是訊號區的重建影像品質,故未來我們將以 SIFTA 作為產生 Kinoform 的主 要演算法。
(a). IFTA 重建影像,影像畫素大小600 × 600
(b). SIFTA 重建影像,影像畫素大小600 × 600 圖 11 IFTA 與 SIFTA 影像品質比較
2.2 光學投影鍵盤之成像模擬
我們的光學投影系統,是使用空間光調制器顯示電腦全像片,再由一均勻平面 波入射,被相位調制後的平面波,帶著相位電腦全像片的資訊,經由遠場繞射後成 像。本節將以 2.2.1 小節的遠場繞射理論為基礎,在 2.2.2 小節模擬 Kinoform 電腦全 像片的光學繞射投影影像。2.2.1
遠場繞射理論
在這一小節,我們將推導一繞射孔徑經過遠場繞射後之成像,並證明成像的結 果即為繞射孔徑的傅立葉轉換。 假設一繞射孔徑位於(𝜉, 𝜂)平面,一往+z方向傳播之平面波入射此孔徑後,其出 射光場繞射至一與(𝜉, 𝜂)平面平行,且距離為z0之(𝑥, 𝑦)觀測平面上,如圖 12 所示。 圖 12 繞射孔徑示意圖 根據惠更斯-菲涅耳光波繞射原理(Huygens-Fresnel Principle),此孔徑之繞射光波 可寫成: 𝑈(𝑃0) =𝑗𝜆1 ∬ 𝑈(𝑃1)𝑒 𝑗𝑘𝑟01 𝑟01 cos 𝜃 𝑑𝐴 Σ (6) 其中λ為光波波長,𝑈(𝑃0)為觀測平面之繞射光場分佈,𝑈(𝑃1)為平行光 入射繞射孔徑後,經由繞射孔徑調制後之出射光場,𝑟0為繞射孔徑上之點𝑃1到觀測 平面之一點𝑃0之距離,𝜃為𝑟0與 z 軸之夾角,式中cos 𝜃可寫成: cos 𝜃 = 𝑧0 𝑟0 (7) 將(7)式代入(6)式:𝑈(𝑃0) =𝑧0 𝑗𝜆∬ 𝑈(𝑃1) 𝑒𝑗𝑘𝑟01 𝑟012 𝑑𝐴 Σ (8) 其中r01又可以寫成 𝑟01 = √(𝑥 − 𝜉)2+ (𝑦 − 𝜂)2+ 𝑧 02 (9) 考慮一般情況下繞射孔徑與繞射屏幕之距離𝑟01遠大於孔徑大小Σ,也就是當 r0 ≫ √Σ時。我們可以利用二項式展開將展開並近似: 𝑟01 ≈ 𝑧0[1 +12(𝑥−𝜉𝑧 0 ) 2 + (𝑦−𝜂𝑧 0 ) 2 ] (10) 將(10)式代入(8)式: 𝑈(𝑥, 𝑦) =𝑧0 𝑗𝜆∫ 𝑈(𝜉, 𝜂) 𝑒𝑗𝑘𝑧0[1+ 1 2(𝑥−𝜉𝑧0) 2 +(𝑦−𝜂 𝑧0) 2 ] 𝑧02[1+12(𝑥−𝜉𝑧0) 2 +(𝑦−𝜂 𝑧0) 2 ] 2𝑑𝜉𝑑𝜂 ∞ −∞ (11) 積分內部 1 2( 𝑥−𝜉 𝑧0 ) 2 + (𝑦−𝜂𝑧 0 ) 2 ≪ 1,分母之中可消去,但分子為複數指數不可消 去,整理得: 𝑈(𝑥, 𝑦) = 𝑒𝑗𝜆𝑧𝑗𝑘𝑧0 0 ∫ 𝑈(𝜉, 𝜂)𝑒 𝑗𝑘[12(𝑥−𝜉𝑧0)2+(𝑦−𝜂𝑧0)2] 𝑑𝜉𝑑𝜂 ∞ −∞ (12) 將積分式內之指數展開,並將不影響積分之部份提出,可將繞射公式整理成: 𝑈(𝑥, 𝑦) =𝑒𝑗𝜆𝑧𝑗𝑘𝑧0 0 𝑒 𝑗 𝑘 2𝑧0(𝑥2+𝑦2)∫ {𝑈(𝜉, 𝜂)𝑒𝑗 𝑘 2𝑧0(𝜉2+𝜂2)} 𝑒−𝑗 𝑘 𝑧0(𝑥𝜉+𝑦𝜂)𝑑𝜉𝑑𝜂 ∞ −∞ (13)
(13)式即為菲涅耳繞射公式(Fresnel diffraction equation),又稱作近場繞射 (near-field diffraction)公式。 接者,考慮傳播距離夠遠的情況下,使得繞射孔徑滿足下式條件: 𝑧0 ≫𝑘(𝜉22+𝜂2) (14) 又可寫成 𝑧0 ≫𝜋𝐷𝜆2~2𝐷𝜆2 (15) 其中 D 為繞射孔徑大小之最大值,對於一個方孔孔徑來說 D 就是其對角線長度。 上式即為遠場繞射條件,滿足上式條件後,繞射光強可化簡成: 𝑈(𝑥, 𝑦) =𝑒𝑗𝜆𝑧𝑗𝑘𝑧0 0 𝑒 𝑗2𝑧0𝑘 (𝑥2+𝑦2) ∫ 𝑈(𝜉, 𝜂)𝑒−𝑗 𝑘 𝑧0(𝑥𝜉+𝑦𝜂)𝑑𝜉𝑑𝜂 ∞ −∞ (16) (16)式即為遠場繞射(far-field diffraction)公式,又稱作夫朗和斐繞射公式 (Fraunhofer diffraction equation)。
𝔉{𝑓(𝜉, 𝜂)} = ℱ(𝑢, 𝑣) =√2𝜋1 ∫ 𝑓(𝜉, 𝜂)𝑒−∞∞ −𝑗2𝜋(𝜉𝑢+𝜂𝑣)𝑑𝜉𝑑𝜂 (17) 其中(𝑢, 𝑣)為原函數之空間頻率座標。比較兩式後可以發現,當滿足(15)式之遠場繞 射條件後,繞射光場分布即為繞射孔徑之傅立葉轉換,唯常數係數不同。值得注意 的是,傅立葉平面的空間頻率座標(u,v)與位置座標(x,y),有著以下座標變換關係:
𝑢 =
𝜆𝑧𝑥 0, 𝑣 =
𝑦 𝜆𝑧0 (18) 另外,由於人眼及一般的感光元件,遵循平方守則,人眼實際看到的光輻照度 I (irradiance)和光強度關係如下: I ∝ |𝑈|2 ∝ |∫ 𝑈(𝜉, 𝜂)𝑒∞ −𝑗2𝑧0𝑘 (𝑥𝜉+𝑦𝜂)𝑑𝜉𝑑𝜂 −∞ | 2 (19) 由上述推導可得以下結論: 1. 由(19)式可知,我們觀察到的遠場繞射影像即為繞射孔徑函數之傅立葉轉換。 2. 由(15)式可知,只要知道電腦全像片的尺寸大小以及使用光波波長,便可以推 斷出遠場繞射所需距離。 在下一個小節中,我們將實際考慮空間光調制器 SLM 顯示電腦全像片。以(19) 式求出其遠場繞射光強分佈,將其平方得到人眼看見的光輻照度,最後以電腦模擬 實際投影成像。2.2.2
SLM 遠場繞射成像
假設總畫素為N × N之電腦全像片顯示在 SLM 上,SLM 上每單位子畫素有效顯 示區為∆x × ∆x大小之正方形,兩畫素中心間距為∆s,SLM 顯示電腦全像片之區塊 大小為L × L之正方形,如圖 13 所示。 圖 13 SLM 畫素分佈示意圖為了方便討論,這裡我們僅討論 x 方向的一維 SLM 表示式,假設有一平面波入 射顯示電腦全像片的 SLM,其出射光可表示為:
U(𝜉) = 𝑟𝑒𝑐𝑡 (
𝜉𝐿) {∑
𝑁𝑓
𝑛∙ 𝑟𝑒𝑐𝑡 (
𝜉−𝑛∆𝑠∆𝑥)
𝑛=1+ 𝑒
𝑖∅1𝑟𝑒𝑐𝑡 (
∆𝑠−∆𝑥𝜉) ∗ 𝑐𝑜𝑚𝑏 (
∆𝑠𝜉)}
(20) 其中,𝑟𝑒𝑐𝑡(𝜉 𝐿⁄ )代表整個 SLM 的顯示範圍,𝑟𝑒𝑐𝑡[(𝜉 − 𝑛∆𝑠) ∆𝑥⁄ ]代表某一畫素的有 效顯示區域,乘上𝑓𝑛即代表該畫素的複數調制量為𝑓𝑛。𝑟𝑒𝑐𝑡[𝜉 (∆𝑠 − ∆𝑥)⁄ ]代表的是 畫素與畫素之間的間隙。「∗」代表的是摺疊積分(convolution)符號,畫素間隙與 𝑐𝑜𝑚𝑏(𝜉 ∆𝑠⁄ )之摺積代表間隙是以週期∆s重複排列。而𝑒𝑖∅1則是代表每個畫素間隙都 調制一個常數相位。 將(20)式做傅立葉轉換,我們可以得到遠場繞射的光場分佈如下: U(𝑢) ∝ 𝐿𝑠𝑖𝑛𝑐(𝐿𝑢) ∗ {∑𝑁 𝑓𝑛𝛥𝑥𝑠𝑖𝑛𝑐(∆𝑥 ∙ 𝑢) ∙ 𝑒−𝑖2𝜋𝑛∆𝑠∙𝑢 𝑛=1 + 𝑒𝑖∅1(∆𝑠 − ∆𝑥)𝑠𝑖𝑛𝑐[(∆𝑠 − ∆𝑥)𝑢] ∙ ∆𝑠 ∙ 𝑐𝑜𝑚𝑏(∆𝑠 ∙ 𝑢)} (21) 其中 u 為影像在傅立葉空間的空間頻率分佈,其和座標空間的關係請見(18)式。 在大括號中,第一項級數∑𝑁𝑛=1𝑓𝑛𝛥𝑥𝑠𝑖𝑛𝑐(∆𝑥 ∙ 𝑢) ∙ 𝑒𝑥𝑝(−𝑖2𝜋𝑛∆𝑠 ∙ 𝑢)即為我們的重建 影像,我們亦可以離散傅立葉轉換的方式將此級數改寫成 ∑𝑁 𝑓𝑛𝛥𝑥𝑠𝑖𝑛𝑐(∆𝑥 ∙ 𝑢) ∙ 𝑒𝑥𝑝(− 𝑗2𝜋𝑚𝑛 𝑁⁄ ) 𝑛=1 (22) 此級數代表所有有效畫素做離散傅立葉轉換 DFT 的結果。其中,m 表示離散傅 立葉空間的座標。這項級數直接對應到我們的成像結果。比較光學及離散傅立葉轉 換,我們可以發現: 𝑚 𝑁= ∆𝑠 ∙ 𝑢
(23) 𝑚 = N∆s 𝑥 𝜆𝑧0, (𝑚 = 1,2,3, … , N) (24) 𝑥𝑚 = 𝑚 ∙ 𝜆𝑧0 𝑁Δ𝑠, (𝑚 = 1,2,3, … , N) (25) x𝑚代表在成像平面第 m 個畫素的位置。由上式可知,成像平面中相鄰兩畫素的 間距為Δx = 𝑥
𝑚+1− 𝑥
𝑚=
𝜆𝑧0 𝑁Δ𝑠 (26) 有了成像平面的畫素間距後,我們可以估計完整重建影像大小。重建影像由 N 個畫素構成,故成像大小 X 為X = N ∙ Δx =
𝜆𝑧0 Δ𝑠 (27) 值得注意的是,影像的大小 X 僅與使用光波長λ、傳播距離𝑧0、SLM 的畫素間 距Δ𝑠有關,與影像的畫素多寡無關。 由於離散傅立葉轉換特性,傅氏空間中的畫素將每 N 個畫素後重複出現。簡言 之,傅氏空間中第 N+1 個畫素將與第 1 個畫素相同,第 N+2 個畫素將與第 2 個畫 素相同,以此類推。因此第 N+1 個畫素到第 2N 個畫素,將構成第二個完整影像。 完整影像最多重複 N 次,級數中的 n 即代表在離散傅氏空間中,某畫素或者完整影 像重複第 n 次, n 為 1 到 N 之正整數。 此影像函數同時乘上一個𝑠𝑖𝑛𝑐(∆𝑥 ∙ 𝑢)函數,代表整個影像強度分佈將受到此 sinc 函數影響,中心強度較強而兩端強度較弱。此 sinc 函數的零點位於 ∆𝑥 ∙ 𝑢 = ±1 (28) 代入頻率-位置座標轉換(18)式,上式變成∆𝑥 ∙
𝜆𝑧𝑥 0= ±1,
(29)𝑥 = ±
𝜆𝑧0 Δ𝑥。
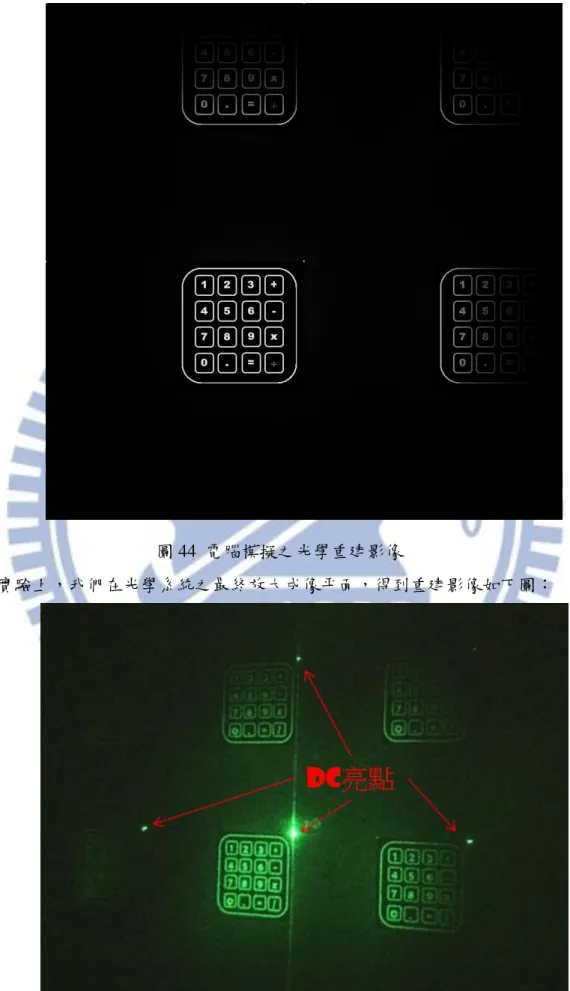
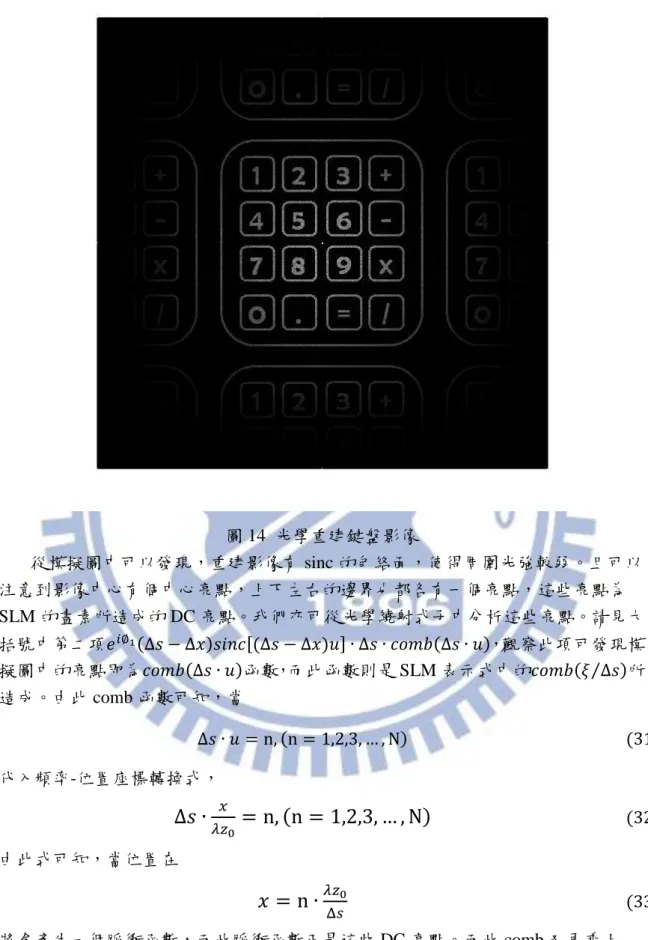
(30) 在此二位置影像將被減弱至零光強。我們以圖 7 作為目標影像,並以光學重建模擬 上述影像特性如圖 14:圖 14 光學重建鍵盤影像 從模擬圖中可以發現,重建影像有 sinc 的包絡面,使得周圍光強較弱。且可以 注意到影像中心有個中心亮點,上下左右的邊界也都各有一個亮點,這些亮點為 SLM 的畫素所造成的 DC 亮點。我們亦可從光學繞射式子中分析這些亮點。請見大 括號中第二項𝑒𝑖∅1(∆𝑠 − ∆𝑥)𝑠𝑖𝑛𝑐[(∆𝑠 − ∆𝑥)𝑢] ∙ ∆𝑠 ∙ 𝑐𝑜𝑚𝑏(∆𝑠 ∙ 𝑢),觀察此項可發現模 擬圖中的亮點即為𝑐𝑜𝑚𝑏(∆𝑠 ∙ 𝑢)函數,而此函數則是 SLM 表示式中的𝑐𝑜𝑚𝑏(𝜉 ∆𝑠⁄ )所 造成。由此 comb 函數可知,當 ∆𝑠 ∙ 𝑢 = n, (n = 1,2,3, … , N) (31) 代入頻率-位置座標轉換式,
∆𝑠 ∙
𝜆𝑧𝑥 0= n, (n = 1,2,3, … , N)
(32) 由此式可知,當位置在𝑥 = n ∙
𝜆𝑧0 Δ𝑠 (33) 將會產生一個脈衝函數,而此脈衝函數正是這些 DC 亮點。而此 comb 又再乘上 𝑠𝑖𝑛𝑐[(∆𝑠 − ∆𝑥)𝑢],可知這些 DC 亮點也有一個 sinc 函數的強度包絡面,且此包絡面(∆𝑠 − ∆𝑥)𝑢 = ±1 (34) (∆𝑠 − ∆𝑥) 𝑥 𝜆𝑧0 = ±1 (35) 由此式可知,DC 亮點的 sinc 包絡面之零點位於
𝑥 = ±
𝜆𝑧0 (∆𝑠−∆𝑥)≠ ±
𝜆𝑧0 Δ𝑥← 影像之包絡面零點位置
(36) 最後,光學繞射式最前方的𝑠𝑖𝑛𝑐(𝐷𝑢)即為遠場繞射成像面上的點擴散函數(point spread function PSF)。PSF 摺積大括號中各項,表示成像平面上構成影像的所有畫素 之光強並非真是一個「點」,而是都呈現 sinc 函數分佈。我們同樣以 sinc 的零點作 為成像面單一畫素的大小依據,當𝐿𝑢 = ±1時,sinc 為零:𝐿
𝜆𝑧𝑥 0= ±1
(37) 我們得到成像面單一畫素的大小為x =
𝜆𝑧0 𝐿− (−
𝜆𝑧0 𝐿) = 2
𝜆𝑧0 𝐿 (38) 在本小節中,我們以遠場繞射理論為基礎,計算出已 SLM 顯示 CGH 之遠場繞 射影像,並以電腦模擬之。我們將重建模擬影像的特性結論如下: 1. 遠場繞射所需距離z0 >2𝐷 2 𝜆 2. 重建影像畫素大小x = 2𝜆𝑧𝐿0 3. 重建影像畫素間距x =𝑁Δ𝑠𝜆𝑧0 = 𝜆𝑧𝐿0 4. 重建影像大小X =𝜆𝑧Δ𝑠02.3 鍵盤影像及光學成像系統設計
經由上一節的理論推導以及模擬,我們可以直接地利用電腦模擬重建出此遠場 繞射投影方法的鍵盤影像。然而,從模擬圖中可以發現影像有一些理論上的限制。 首先是由 SLM 的畫素間距分佈,所導致的影像中間的中央亮點。由於此量點的能 量相對較高,因此將直接地影響我們觀看影像。另外,由於畫素大小影響,影像在 周圍有漸弱的趨勢,將導致影像強度失去標準。顯示二元影像(黑白影像)時即有 光強強弱分佈,若要顯示灰階影像,則影像強度將完全失真。在本節之中,我們將 針對上述兩個影像的缺陷做鍵盤的影像設計。2.3.1
鍵盤影像設計
首先,由於鍵盤的光學重建影像結果將受到 sinc 函數的影響,使得中心光強度 較強而兩旁的強度較弱,因此我們讓目標影像(包含振幅區及雜訊區的影像)先除 上此 sinc 函數,先壓低中心亮度並拉高兩旁的強度。圖 15 即為影像作 sinc 處理前 後的比較圖。 (a) (b) 圖 15 Sinc 函數處理影像(a).處理前(b).處理後 接著我們利用光學重建公式將影像光學重建,結果如圖 16 所示: (a)(b) 圖 16 Sinc 修正之光學重建鍵盤影像 (a).修正前(b).修正後 從重建影像可以看出做 sinc 修正後重建影像強度較為均勻。再者,根據 SIFTA 的設計流程,我們知道進入演算法的目標影像可以利用畫素擴增的方式,將影像分 成訊號區及雜訊區,如圖 10 所示。 此處我們將鍵盤影像擺置在目標左下角,原因有二,一是可以將目標影像分出 訊號區與雜訊區,訊號區的部分站左下角四分之一,也就是我們的鍵盤影像。此處 的鍵盤影像,包含白色的鍵盤與黑色的背景。之所以把黑色的背景也列為訊號區, 是因為訊號區的振幅在影像空間有受到限制,因此將黑白部分都設為我們的振幅限 制,可以得到較高的黑白對比。而雜訊區則是另外四分之三區域。第二個將影像移 至左下角的原因,則是可以避開中心亮點。圖 17 為經過設計後的目標影像。 圖 17 SIFTA 之目標影像設計(sinc 修正後)
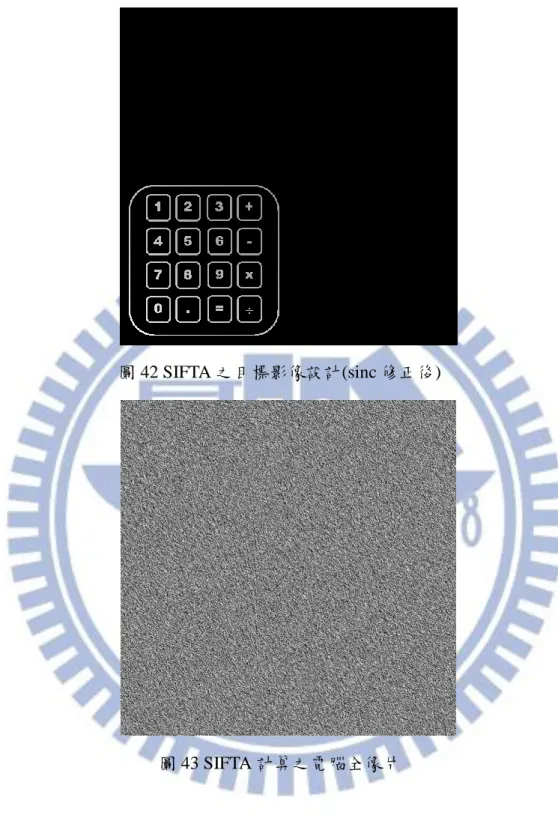
同樣的我們利用光學重建公式將影像光學重建,結果如圖 18 所示: 圖 18 SIFTA 光學重建影像(sinc 修正後) 藉由 SIFTA 的目標影像訊號區與雜訊區的設計,我們增加了演算法的自由度且 藉此增進了影像品質,並且順利避開 SLM 的畫素間距所造成的繞射中心亮點。另 外,藉由目標影像的 sinc 函數修正前置處理,我們使光學重建影像之光強更均勻。 經由上述目標影像設計,我們解決了在光學繞射理論下的成像缺陷,並模擬出 最後修正後的光學重建影像結果,且得到 SIFTA 演算法計算後 Kinoform 電腦全像 片。有了電腦全像片後,接著我們設計一組光學投影系統,實踐我們提出的投影方 法。
2.3.2
投影系統設計
在此小節中,我們將以實驗室可取得之光學元件建立一組光學投影系統。在此 之前,我們必須先知道欲投影一n × n大小的鍵盤影像,需要多少距離才可達到遠場 繞射條件,根據(39)式:z >
2𝐷2 𝜆 (39) 其中 D 為目標影像之對角線長度(即最大孔徑)。我們的目標影像經過設計後之解析度大小 為2n × 2n(包含訊號區及雜訊區),以 SLM 顯示後,其對角線長度 D 為2√2𝑛∆s,代入上z >
2(2√2𝑛∆s) 2 𝜆=
16𝑛2Δ𝑠2 𝜆 (40) 假設欲顯示300 × 300解析度鍵盤之電腦全像片的SLM 畫素間距Δs為 20μm,而使 用波長為 532nm 的綠光,則遠場繞射條件為:z >
16𝑛𝜆2Δ𝑠2=
16×300532×102×(20×10−9 −6)2≅ 270(𝑚)
(41) 一般用於投影的顯示器之顯示畫素大小大約落在 8 至 20μm。由上式可知,投影距離 必須在 270 公尺後成像才可以滿足遠場繞射條件,在實用上還欠缺可行性。 若我們限定投影鍵盤距離為 SLM 後 50 公分,則需要多小畫素呢?z = 50 × 10
−2>
16×3002×∆𝑠2 532×10−9 (42) ∆s < 0.43𝜇𝑚 (43) 現今的微影製程技術,製作此種畫素尺寸的 SLM 晶片是可能做得到的。但由於此畫素 大小已略小於波長,純量繞射的理論已不適用,這部分超越我們的投影理論,在此暫不討 論。 為了達到將 CGH 作傅立葉轉換之目的,我們設計了一個傅立葉透鏡成像系統如圖 19 所示: 圖 19 光學系統設計概念 自雷射出光後,經由擴束並入射輸入 CGH 之 SLM 開始繞射,此時我們在距離 SLM 之 d 處擺上一個焦距為𝑓1傅立葉透鏡,使得在焦距面上的光場分佈為:U(𝑥, 𝑦) =
𝑒𝑗𝑘(𝑑+𝑓1) 𝑗𝜆𝑓1𝑒
𝑗 𝑘 2𝑓1(1− 𝑑 𝑓1)(𝑥2+𝑦2)∬ 𝑈(𝜉, 𝜂)𝑒
−𝑗 𝑘 2𝑓1(𝑥𝜉+𝑦𝜂)𝑑𝜉𝑑𝜂
∞ −∞ (44) 比較上式及傅立葉轉換公式,我們可知在焦平面上的繞射光場U(𝑥, 𝑦)正是 SLM 平面光場 𝑈(𝜉, 𝜂)之傅立葉轉換。因此在焦平面上將出現鍵盤影像,由於我們只看得見強度分佈,積 分式前的相位項並不影響成像。焦平面鍵盤影像尺寸大小同樣以 2.2 節分析可得到:X =
𝜆𝑓1 Δ𝑠 (45) 此時影像大小與傅立葉透鏡焦距相關。根據實驗經驗,此時的鍵盤影像過小(小於兩公分),我們可以配合具放大影像效果之成像透鏡將鍵盤影像放大。我們在距離焦平 面後𝑠𝑜處擺上焦距𝑓2之成像透鏡,此成像透鏡遵守成像公式: 1 𝑠𝑜
+
1 𝑠𝑖=
1 𝑓2 (46) 此時的放大倍率 M 為像距與物距比值:M =
𝑠𝑖 𝑠𝑜 (47) 放大後的鍵盤影像大小X′,則可以表示為X
′= MX =
𝑠𝑖 𝑠𝑜 𝜆𝑓1 ∆𝑠 (48) 藉由調整物距𝑠𝑜及像距𝑠𝑖,我們可以控制想要的鍵盤影像大小。本章我們討論光 學系統的設計並探討此投影方法的可行性,更詳細的光學架構、實驗數據及投影影 像成果我們將在第四章闡述並討論。2.4 電腦全像片參數分析
利用 SIFTA 設計的相位電腦全像片,影響重建影像品質原因主要有二:第一為 演算法中的遞迴次數。理論上遞迴迴圈次數愈多,影像品質愈佳。然而遞迴圈數的 增加亦增加演算法的計算時間。且由模擬後我們可以發現,隨著遞迴的圈數增加, 影像品質增進的速度愈慢,甚至停止增加影像品質。 第二個影響影像品質的因素是電腦全像片的相位階數。換句話說,傳統全像調 制的相位在 0 到2π之間是連續值;不同於傳統相位全像片,電腦全像片的相位調制 是離散的。因此 0 到2π細分的階數多寡,將會影響電腦全像片的重建影像品質。2.4.1
方均根誤差值
上述兩種重要的影響因素都將決定影像品質。在此一小節,我們定義重建影像 的方均根誤差值(Root Mean Square Error,以 RMSE 簡稱之),並以此來估計影像 品質的好壞。其定義如(49)式:𝐸
𝑟𝑚𝑠= √
𝑀×𝑁1∑
𝑚=1𝑀∑
𝑁𝑛=1(|𝑓
𝑚,𝑛|
2− 𝑃|ℎ
𝑚,𝑛|
2)
2 (49) 其中,P =
∑ ∑ (|𝑓𝑚,𝑛| 2 ) 𝑁 𝑛=1 𝑀 𝑚=1 ∑𝑀𝑚=1∑𝑁𝑛=1(|ℎ𝑚,𝑛|2)。
(50) (49)式中 M、N 代表影像之解析度為M × N,𝑓𝑚,𝑛為目標影像之複數振幅分佈函 數,ℎ𝑚,𝑛為重建影像之複數振幅分佈函數。由於電腦之快速傅立葉轉換(FFT)等計算及重建影像之能量能處在同一標準下比較。 RMSE 的主要物理意義在於比較重建影像與目標影像的差異。取方均根即是找 到重建影像與目標影像的平均誤差正值。當迴圈圈數增加時,RMSE 值將會下降, 最後收斂於某值。為了判斷收斂值,我們定義收斂判斷值𝐸𝑙:
𝐸
𝑙(𝐾) =
𝐸𝑟𝑚𝑠(𝐾−1)−𝐸𝑟𝑚𝑠(𝐾) 𝐸𝑟𝑚𝑠(𝐾−1)。
(51) 𝐸𝑙(𝐾)表第迴圈時,𝐾迴圈及𝐾 − 1迴圈 RMSE 減少量的比例,我們定義當 𝐸𝑙(𝐾) < 0.001時,再增加遞迴運算亦無法減少影像誤差量,運算此時達到收斂標準, 可以停止迴圈。 同樣地,在固定一迴圈數的情況下,亦可用 RMSE 判斷相位取樣階數多寡之影 響。此時收斂判斷值𝐸𝑝:𝐸
𝑝(𝐾) =
𝐸𝑟𝑚𝑠(𝐾−1)−𝐸𝑟𝑚𝑠(𝐾) 𝐸𝑟𝑚𝑠(𝐾−1)。
(52) 同樣定義當𝐸𝑝(𝐾) < 0.001時,再增加相位階數亦無法減少影像誤差量,運算此 時達到收斂標準,此時的相位階數即可使用。2.4.2
遞迴圈數影響
在此我們同樣以圖 7 之鍵盤影像作為目標影像。鍵盤影像之總畫素為300 × 300, 經過影像設計後變為600 × 600。以 RMSE 作為縱軸對迴圈數做圖,觀察 RMSE 隨 著迴圈數的變化趨勢。此時為避免相位取樣改變的雙重參數影響,我們固定相位取 樣為 200 階,並設定迴圈數從 1 至 200 圈。 由於我們最後只觀察鍵盤影像的部分,因此我們只以設計影像中左下角四分之 一部分,計算 RMSE 值。其模擬結果如圖 20:圖 20 RMSE 對迴圈數作圖 觀察此趨勢圖可以發現,RMSE 的值在迴圈達到 40 圈時,就已經達到判斷條件。需 要注意的是,不同的圖形所需要的圈數不同,然而其差異並不大,且直接觀看圖形 也不會察覺差異,因此往後 SIFTA 演算法的迴圈圈數將設定為 40 圈。 表 2 為重建影像隨著迴圈數增加所對應的改變趨勢。從表中亦可看出當迴圈數 到達 40 圈後,影像品質進步已經有限。
遞迴圈數 1 20 RMSE 值 0.1952 0.0099 SIFTA 電腦模擬重建影像 遞迴圈數 40 200 RMSE 值 0.0074 0.0053 SIFTA 電腦模擬重建影像 表 2 SIFTA 設計不同迴圈數之電腦模擬重建影像
2.4.3
相位取樣影響
接著,我們以 SIFTA 演算法的迴圈次數 40 次為基礎,探討相位取樣的階數對 影像造成的影響。 我們將相同鍵盤圖形設計為 SIFTA 的目標影像,並將 0 至 2π的相位調制量做階 數變化,從 2 階(即分成 0、π、2π)開始,直到細分為 200 階(階距為 0.01π)。將 RMSE 與相位階數變化作圖 21 如下:圖 21 RMSE 對相位階數作圖 由圖 21 可知,當相位階數取到 80 階時,達到判斷標準。但此時再增加相位階 數增進影像品質尚有幫助。由於相位的取樣階數對演算法的計算速度沒有影響,故 我們最後仍將相位分成 200 階。 表 3 為重建影像隨著相位階數增加所對應的改變趨勢。從表中亦可看出當相位 階數超過 80 階後,影像品質進步已經有限。此外,本模擬讓微影製程製作晶片型空 間光調制器有一個參考依據。不同於可以顯示 8 位元(256 灰階)的液晶顯示器,微影 製程一次曝光只可增加一個位元,且每一次曝光都含有許多製程參數設定需要考量, 尤其是曝光位置校準困難,使得提高相位階數有一定困難度。但從表格中可以發現, 當相位取樣階數在 4 階(2 位元)時,即使對比度較差,但已可觀看完整鍵盤影像。由 於 2 位元所需要的曝光次數較少,較容易實現晶片型空間光調制器的製程。
相位階數 2 4 RMSE 值 0.0595 0.0590 SIFTA 電腦模擬重建影像 相位階數 80 200 RMSE 值 0.0086 0.0060 SIFTA 電腦模擬重建影像 表 3 SIFTA 設計不同相位階數之電腦模擬重建影像 在第二章之中,我們先介紹了此繞射投影系統所使用的電腦全像片,並提出演 算法 SIFTA 來增進電腦全像片的重建影像品質。接著以繞射理論為基礎,分析電腦 全像片之光學繞射成像結果。藉由 SIFTA 的目標影像訊號區及雜訊區設計,以及 sinc 函數的修正,使得光學繞射成像鍵盤能夠強度均勻分布。根據遠場繞射的理論計算, 我們設計一套光學系統並探討此投影技術的可能性。最後,我們定義方均根誤差值 量化了影像品質,並分析演算法中的重要參數對影像品質的影響。 在瞭解上述的成像理論後,下一個章節中將實際考量用於顯示設計好的電腦全 像片之空間光調制器。
第 3 章 矽基液晶顯示器相位調製特性量測
本論文所使用的空間光調制器為矽基液晶顯示器(Liquid crystal on silicon,往後 以 LCoS 簡稱之),本章中我們將詳細探討其光學調制特性。由液晶光學理論延伸, 說明其是如何顯示相位,接著利用實驗的方式實際量測 LCoS 的振幅及相位調制曲 線,證實其可用於顯示相位分佈複雜的 Kinoform 電腦全像片。
3.1 LCoS 顯示器簡介
我們所使用的 SLM 是由 HOLOEYE 公司出產,型號為 LC-R 2500 之 LCoS。其 為一種液晶與 CMOS 電路製程結合之液晶顯示器。此款 LCoS 為反射式液晶顯示器, 結構如圖 所示: 圖 22 LCoS 分層結構圖 分層結構圖中,正中間為液晶層,其上下層是液晶的配向版,用於配向液晶層 的分子初始偏轉角度。配向版上下方是透明電極層以及 CMOS 層,藉由 CMOS 控 制電路與透明電極之間加入電壓,我們可以改變液晶層的液晶分子傾角(tilt angle), 以達到控制液晶層光學特性之目的。最上層為玻璃保護層保護內部結構。最下層為 軟性電路板,接到 LCoS 控制器。完整的 LC-R 2500 儀器如圖 23: 圖 23 LC-R2500 空間光調制器 (含控制器及顯示器)反射式液晶顯示器與穿透式顯示器最大的不同,在於反射式顯示器之 CMOS 驅 動電路位在反射層底下,而穿透式的電路則是位於畫素之間。反射式顯示器中的畫 素開口率因此較穿透式顯示器高。所謂的畫素開口率,指的是單一畫素實際有顯示 影像的區域比例,其餘部分則是畫素的間隙。一般穿透式的液晶之開口率約為 75%, 而 LC-R 2500 型號的反射式液晶顯示器可以達到 93%開口率。 有關 LC-R 2500 更詳細的規格見下表: 表 4 HOLOEYE LC-R2500 規格表 由上表可知,此型號之 LCoS 為 45 度偏轉的向列扭轉型液晶。可輸入的灰階為 256 階(8 位元),解析度為1024 × 768,單一畫素間距為 19μm。在下一節,我們將 簡述何謂向列扭轉型液晶以及其光學特性。
3.2 向列扭轉型液晶光學特性
所謂液晶,指的是一種單光軸(uniaxial)的非等向性(anisotropic)雙折射液態晶體。 我們稱橢圓液晶分子的長軸方向為液晶指向向量(director),平行於此方向的折射率 為𝑛𝑒,垂直於此方向的折射率為𝑛𝑜。如下圖 24 所示,當某液晶材料的𝑛𝑒大於𝑛𝑜時, 我們稱之為正型液晶,反之為負型液晶。當存在一外加電場時,液晶內的電偶極將 受到電場驅動,克服液晶的恢復能(彈性位能),使液晶分子產生偏轉,而正型液晶 將會使 director 偏轉至平行於外加電場,負型則使 director 偏轉至垂直於外加電場。 (b) (b) 圖 24 正負型液晶分子外加電壓示意圖(a)液晶分子 (b)外加電壓偏轉示意圖由於液晶保有液體的流動特性以及固體的排列特性,故衍伸出一種非常適合作 為開關(on-off)的向列扭轉型液晶(twist nematic liquid crystal-TNLC)。此種液晶盒在 製作時,會在其上、下基板做配向的動作,所謂配向指的是在上下基板加入某個特 定的邊界條件,液晶分子會根據上、下基板的邊界條件自動排列以達到最低的位能。 最常使用的配向方法是利用基板板面凹凸不一致,讓液晶排列成想要的分佈方式, 例如平行刮痕就可讓液晶平行整齊排列。圖 25 即是上、下基板配向夾 45 度的液晶 盒,由於上、下基板邊界條件的不同,在基板之間的液晶,將會漸進式的偏轉以達 到最低位能。 圖 25 45°向列扭轉液晶盒示意圖 在無外加電壓的情況下,根據液晶波導特性(Waveguiding in TN-LC,即 Adiabatic Following 現象),一線偏振入射光從上基板進入,其偏振方向將隨著液晶分子的指 向向量跟著轉動,到達下基板時,線偏振會與入射時夾45°,經由反射層反射後,沿 著原方向轉至上基板,最後出射光的偏振態將與原偏振態平行。 由於 LCoS 結構上並沒有附加偏振片來控制入射液晶層的偏振態,我們常在光 學系統中進入 LCoS 的位置放置偏振片,出射 LCoS 後再放置檢偏片。藉由線偏振 光進入液晶層後出射液晶層後相位改變,再由擺放檢偏片的角度來改變出光振幅。 偏振片、TN-LC 液晶層、檢偏片之組合系統我們稱為空間光調制系統(簡稱為 SLM 系統),並以此系統達到調制入射光的振幅及相位之目的。
3.3 LCoS 相位及振幅調制特性之模擬分析
由上一小節論述可知,藉由在 TN-LC 外加偏振片以及檢偏片,可以調制入射光 的相位以及振幅。此處我們引用瓊式矩陣運算(Jones calculus),去計算入射光經過此Jones calculus 非常適合用於分析光的傳播,可以藉由簡單的矩陣運算,獲得入 射光被光學系統的調制影響。以下將簡介 Jones calculus 基本的操作原理。首先,定 義實驗室坐標系 xyz,一線性偏振光朝向+z 方向傳播。光的電場可以表示成: 𝐸⃑ = 𝐸⃑⃑⃑⃑ 𝑒0 𝑖(𝑘𝑧−𝜔𝑡) = (𝑥̂𝐸 0𝑥+ 𝑦̂𝐸0𝑦)𝑒𝑖(𝑘𝑧−𝜔𝑡) = 𝐸0(𝑥̂ cos 𝜃 + 𝑦̂ sin 𝜃)𝑒𝑖(𝑘𝑧−𝜔𝑡) (53) 其中,E 0 ⃑⃑⃑⃑⃑⃑ 為入射光之振幅向量,𝐸 0𝑥為振幅在 x 方向上的分量,𝐸0𝑥為振幅在 y 方向上的分量,𝑘為波數,𝜔為入射光之角頻率,𝜃為振幅向量與 x 軸之夾角。 若我們以 Jones calculus 的方式表示,省略𝑒𝑖(𝑘𝑧−𝜔𝑡)波動的傳播項,可以將此線 性偏振光表示成 Jones vector: 𝐸⃑ = [𝐸𝐸0𝑥 0𝑦] = 𝐸0[cos 𝜃sin 𝜃] (54) 當 x 方向的電場若和 y 方向的電場存在著一相位差∆𝜑=𝜑𝑦− 𝜑𝑥,則雷射偏振態 將會成為橢圓偏振態,此橢圓偏振電場可以表示成 𝐸⃑ = [𝐸 𝐸0𝑥 0𝑦𝑒𝑖∆𝜑] = 𝐸0[ cos 𝜃sin 𝜃 𝑒𝑖∆𝜑] (55) 由於 x 方向與 y 方向的電場存在的相位差有各種可能,故上式橢圓偏振電場可 用於表示任意偏振態。舉例來說∆𝜑 = 0時,(55)式將回到(54)式成為線偏振;當 ∆φ = ± 𝜋 2⁄ 時,電場之偏振態為圓偏振。
我們常以 Jones vector 表示電場偏振態,並以 Jones matrices 來表示光學元件。 將光學元件矩陣與電場向量乘積,可以用來表示此電場向量通過光學元件的過程。 矩陣乘積後得到新的電場向量,此向量即代表通過元件後偏振態及 x 方向上和 y 方 向上的振幅及相位值。表 5 為常見光學元件之瓊式矩陣表示式。 介紹完液晶的特性以及瓊式矩陣的基本原理,接下來將實際考慮我們所使用到 的 SLM 系統,比較入射光及出射光的 Jones vector,算出通過此系統之振幅及相位 調制量。 以光軸的角度來看入射光經過 SLM 系統,光路可等效於圖 26,入射光束往正 z 軸傳播,平面波經過了半波板調整線性偏振角度使線偏振方向與 x 軸夾θ角,再入 射 LCoS,接著反射出 LCoS(圖中標示為 LCoS′),最後透過檢偏片,得到系統最後 出射光。
圖 26 SLM 系統光軸等效光路圖 光學元件 對應瓊式矩陣 線偏振片-穿透軸平行於 x 方向 線偏振片-穿透軸平行於 y 方向 線偏振片-穿透軸平行於±45°方向 線偏振片-穿透軸與 x 軸夾𝜃角 四分之波版-快軸平行於 x 方向 四分之波版-快軸平行於 y 方向 半波板-快軸與 x 軸夾θ角 表 5 常見光學元件之瓊式矩陣表示式 根據 Jones calculus,圖 26 之入射光與出射光關係如下: 𝑉′ ⃑⃑⃑ = 𝐴𝑀̃𝑀𝑉⃑ (56)
LCoS 之光學元件 Jones matrix,𝑀̃為經由下基板反射後,反向 LCoS 之 Jones matrix,
A 則為檢偏片之 Jones matrix。從 Pochi Yeh 教授與 Claire Gu 教授所著之 Optics of
Liquid Crystal Displays[16]中查表,得到檢偏片以及 TN-LC 之 Jones matrices 如下: A= [ 𝑐𝑜𝑠2𝜃′ cos 𝜃′sin 𝜃′
cos 𝜃′sin 𝜃′ 𝑠𝑖𝑛2𝜃′ ] (57)
𝑀 = [cos 𝜙 −sin 𝜙sin 𝜙 cos 𝜙 ] [cos 𝑋 − 𝑖 𝛤 2 sin 𝑋 𝑋 𝜙 sin 𝑋 𝑋
−𝜙sin 𝑋𝑋 cos 𝑋 + 𝑖𝛤2sin 𝑋𝑋 ] (58)
由書中推導的過程可知,在垂直入射的前提下,LCoS 下基板反射的光看到的反 向 LCoS 矩陣𝑀̃,恰等於原 LCoS 矩陣取轉置後的結果。 𝑀̃ = 𝑀𝑡 = [cos 𝑋 − 𝑖 𝛤 2 sin 𝑋 𝑋 −𝜙 sin 𝑋 𝑋
𝜙sin 𝑋𝑋 cos 𝑋 + 𝑖𝛤2sin 𝑋𝑋 ] [
cos 𝜙 sin 𝜙 −sin 𝜙 cos 𝜙] (59) 其中,𝜃′為檢偏片穿透軸與x軸夾角,𝜙為 TN-LC 上下基板配向夾角,也就是上下 基板液晶分子所扭轉的總角度,Γ為光經過液晶分子快軸及慢軸方向的相位延遲量, 最後X = √𝜙2+ (Γ 2⁄ )2。需要注意的地方是,此 TN-LC 瓊式矩陣是由上基板的 director 平行於 x 軸為前題所推導而來。 假設偏振片與 x 軸夾𝜃角,則入射光之偏振態: 𝑉 = [cos 𝜃sin 𝜃] (60) 經過矩陣與向量相乘後得到以下式子: 𝑉′ ⃑⃑⃑⃑ = 𝐴𝑀̃𝑀𝑉⃑ (61) = [ 𝑐𝑜𝑠2𝜃′ cos 𝜃′sin 𝜃′ cos 𝜃′sin 𝜃′ 𝑠𝑖𝑛2𝜃′ ] [ cos 𝑋 − 𝑖𝛤 2 sin 𝑋 𝑋 −𝜙 sin 𝑋 𝑋 𝜙sin 𝑋 𝑋 cos 𝑋 + 𝑖 𝛤 2 sin 𝑋 𝑋
] [−sin 𝜙 cos 𝜙]cos 𝜙 sin 𝜙
∙ [cos 𝜙 −sin 𝜙sin 𝜙 cos 𝜙 ] [cos 𝑋 − 𝑖 𝛤 2 sin 𝑋 𝑋 𝜙 sin 𝑋 𝑋 −𝜙sin 𝑋 𝑋 cos 𝑋 + 𝑖 𝛤 2 sin 𝑋 𝑋 ] [cos 𝜃sin 𝜃] = ⋯ …
= Z [cos 𝜃′
sin 𝜃′] (62)
其中Z =
cos(𝜃 − 𝜃′) [cos2𝑋 + (𝜙2− (Γ 2⁄ )2) (sin 𝑋 𝑋 ) 2 − 𝑖Γ2sin 2𝑋𝑋 ] −𝑖 sin(𝜃 − 𝜃′) Γ𝜙 (sin 𝑋 𝑋 ) 2 。 (63) 複數調制量 Z 亦可以整理成: Z = 𝐸0′exp 𝑖𝜑′ (64) 此時𝐸0′即為振幅調制量,𝜑′為相位調制量。 舉例來說,假設使用的光波長為 532 nm,TNLC 液晶扭轉 45 度,未加電壓之 𝑛𝑒− 𝑛𝑜值為 0.23(外加電壓後降為 0)、液晶層厚度 d 為 5.5 um,快、慢軸相位延 遲量為Γ =2𝜋𝜆 (𝑛𝑒− 𝑛𝑜)𝑑,入射光偏振方向為0°,檢偏片的角度為30°,則在無外加 電壓的情況下,出射光之複數振幅 Z 如下: Z = 0.795𝑒𝑖1.193𝜋。 (65) 由此可知,入射光經過此 SLM 系統之振幅調制為 0.795,相位調制為 1.193π。 Jones calculus 讓我們能準確地判斷線偏振光通過 LCoS 及檢偏片後的振幅以及相位 調制量。 然而,此處我們尚未考慮液晶存在外加電壓的情況,現在我們將更深入地討論 若液晶層存在外加電壓時的情況。圖 27 為 TN-LC 在外加電壓後的液晶偏轉情形。 從圖(a)可以發現,正型液晶在外加電壓後將倒向電場方向。如圖(b)所示,隨著電壓 的增強,入射光看到的𝑛𝑒值愈來愈小,直到液晶完全倒向電場方向。此時入射方向 與液晶 director 平行,任何偏振角度的線偏振,都只會看到𝑛𝑜的折射率。換句話說, 隨著外加電壓上升,𝑛𝑒− 𝑛𝑜值將越來越小,直到液晶完全平行電場方向,𝑛𝑒− 𝑛𝑜值 將降為零,。
(b) 圖 27 TNLC 外加電場之液晶分子導向(a).TN-LC 於外加電場下之液晶倒向(b).液晶分 子外加電場偏轉示意圖 我們在顯示器的每個畫素中輸入灰階,就是給予該畫素外加電場驅動液晶使液 晶偏轉。接著,我們希望知道以 Jones calculus 算出來的結果(振幅𝐸0′及相位調制量 𝜑′)與電壓之間的關係。然而, HOLOEYE 公司並沒有提供我們外加電壓與𝑛𝑒值的 關係,也就是說我們無法知道電壓與Γ = 𝑘(𝑛𝑒− 𝑛𝑜)𝑑之間的關係。但由前述可知, 我們可以Γ = 𝑘(𝑛𝑒− 𝑛𝑜)𝑑值的衰減,代表逐漸增加外加電壓時液晶倒向的過程。以 下我們將以振幅𝐸0′及相位調制量𝜑′與Γ之間的關係做模擬:假設使用的光波長為 532 nm,TNLC 液晶扭轉 45 度,未加電壓之𝑛𝑒 − 𝑛𝑜值為 0.23(外加強電壓後逐漸降為 0)、液晶層厚度 d 為 5.5 um,快、慢軸相位延遲量為Γ,入射光偏振方向為與 x 軸 夾0°,檢偏片從0°轉到180°。經過計算後,得到的𝐸0′及𝜑′對Γ做圖如下: (a) 入射偏振0°,檢偏片0°之振幅及相位調制量
(b) 入射偏振0°,檢偏片30°之振幅及相位調制量
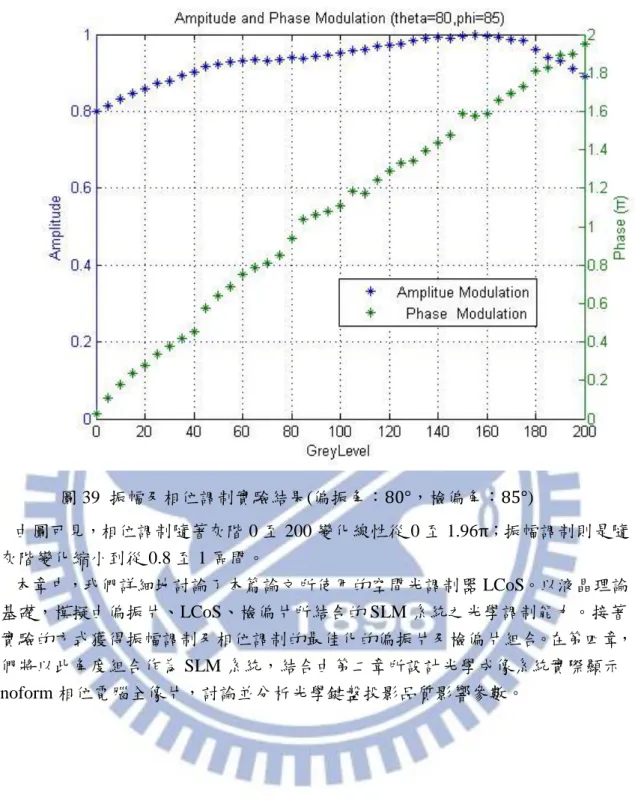
(d) 入射偏振0°,檢偏片90°之振幅及相位調制量 圖 28 振幅及相位調制模擬圖 圖 28 中,藍色線為振幅變化,綠色線為相位變化,橫軸為Γ值,最左端的零代 表外加電壓極大,液晶完全倒向電場方向,此時液晶分子完全垂直於液晶盒表面, 使得入射光的線偏振不管為何角度都只會看到𝑛𝑜,而Γ值為零;又由圖中隨著Γ值愈 增加表示外加電壓愈弱,橫軸的最右表示無外加電壓,此時液晶分子完全平行於液 晶盒表面,從上基板漸漸扭轉至下基板。 此次模擬是以𝑛𝑒− 𝑛𝑜之初始值為 0.23 做計算。然而,LCoS 原廠並無提供𝑛𝑒− 𝑛𝑜 之實際值,且 HOLOEYE-LC R2500 使用時,乃是從電腦輸入已知灰階後,儀器會 自動以灰階對應之電壓驅動液晶,所以我們並不知道實際液晶在輸入灰階時,所對 應到電壓以及Γ變化為何範圍。故總的來說,以實驗的方式找到某一入射偏振態及 檢偏片角度,使輸入灰階時振幅調制為均一且相位調制為線性變化至2𝜋,最為方便。 然而,從模擬圖中可發現,並無一種偏振態及檢偏片的角度,使得振幅調制為 均一不變。但相對於振幅調制,不同角度下,相位調制隨著灰階的改變量則較為線 性,且可以達到2𝜋。由模擬結果可知,我們只可找到振幅隨著灰階改變變化量小而 相位調制量最大(達2𝜋)所對應到的入射線性偏振態及檢偏片角度。




![圖 30 LCoS 未加電壓之同心圓干涉條紋 在前人的參考文獻中,有人實驗發現 HOLOEYE 公司出產的 LC R-2500 反射面 為一凸面而非平面,因此導致反射光波前改為球面波,並與平面波干涉呈同心圓條 紋[17][18]。從干涉條紋圖可以發現,自中心往上數共有四條亮紋,往左右數共約 9 條亮紋。由於反射光走了兩倍的距離,可知 LCoS 最上邊與最中間之深度差為 2 個 波長;最右邊與中間的深度差為 4.5 個波長,也就是大約 1 到 2.25μm 左右。 圖 31 LCoS 凸反射面示意圖 在](https://thumb-ap.123doks.com/thumbv2/9libinfo/8754880.206668/54.892.349.550.108.260/為一凸面而以發現自中心往上數共四條亮紋往左右數個波長也就是.webp)