航測及遙測學刊 第十一卷 第四期 第 339-359 頁 民國 95 年 12 月 339 Journal of Photogrammetry and Remote Sensing
Volume 11, No.4, December 2006, pp. 339-359
萃取物表角面特徵點供多測站地面光達 點雲面之連結
蔡展榮
1李姝儀
2摘要
本文提出一個半自動化的多測站地面光達點雲面連結方法,它是從雷射點雲萃取被掃瞄物表面上的 局部角面特徵點並求定其三維坐標,進而將這些共軛角面特徵點做為連結點,把多個光達測站點雲轉換 到同一個物空間坐標系統中,俾行資料連結整合之用。而在實務上,會有角面特徵點品質不佳、點數少、
或分佈不佳的情況,所以本文以加入適當的「虛擬角點」的構想來解決此一問題;本文實驗成果顯示,
在前述的情況下,加入適當的虛擬角點可改善連結點的幾何分佈強度,使得整體坐標轉換參數精度可提 升 36%~71%。掃瞄距離 S 大於 50m 時,局部平面點雲到最小二乘擬合平面的距離均方根值 RMSD 和 S 之 比值 RMSD/S 約收斂於常數 0.00015。
關鍵詞:光達、最小二乘擬合、角面特徵點、連結點、坐標系統
1. 前言
地面雷射掃瞄儀(terrestrial laser scanner)為主 動式的非接觸量測系統,其優點是它能在短時間內 獲得物表上的大量點群之三維點位坐標(幾何資 訊),也能記錄雷射回波強度值(輻射資訊),這些 點群又常被稱為點雲(point cloud)。點雲可視為密 集覆蓋在被掃瞄物體表面上的量測點,提供物體
(如:建物)的細節資訊,廣泛應用於測量、建築 及計算機視覺等各領域進行三維模型重建的工作。
在實際的模型重建應用上,單一掃瞄站往往無 法完全的涵蓋被測物,需以多測站施測之,再進行 各測站資料的連結整合。而點雲之點位資訊是以掃 瞄時的測站為參考坐標系,稱為「測站坐標系」,
故各個掃瞄站的坐標系統皆不相同,必須先將各測 站的點雲資料轉換到同一個坐標系統中。
進行坐標轉換時,可在多測站量測對應的同名
點作為連結點(tie points),達到資料連結的目的,
例如,以相鄰測站間之共軛覘標做為連結點。目前 亦有研究將連結點擴展成以線、面等特徵進行連結 處理,可從不同測站的資料中找出共同的幾何特 徵,再進一步據以求得轉換參數,如 Zhao and Shibasaki(2001)將點雲資料以人類視覺三維透視模 式展示成距離影像(range image),經由投影處理 後可得到特徵線段,再匹配這些特徵線段,求定測 站連結的轉換參數。或是 Dold and Brenner(2004)以 兩測站間互相不平行的三對共軛平面為條件,使用 平面法向量之幾何關係來達到測站連結的目的。而 目前以地面雷射掃瞄儀為基礎的多測站連結的方 法,可分為共軛面轉換法、共軛覘標控制法、測站 後視稜鏡法、及曲面匹配法(曾義星、等,2003)。
由 於 點 雲 具 有 次 隨 機 (sub-random) 的 特 性 (Axelsson, 1999),它們在三維物空間的位置分佈和 掃瞄線方向有關,但在距離方向是隨機的。而且任
1國立成功大學測量及空間資訊學系副教授
2國立成功大學測量及空間資訊學系碩士
收到日期:民國 94 年 10 月 01 日 修改日期:民國 95 年 09 月 11 日 接受日期:民國 95 年 09 月 14 日
不存在有一對一的點位對應關係;此外,受掃瞄密 度、掃瞄方向的限制,雷射點也無法落在被測物面 的特徵點(線)上。若將點雲資料展示在三維空間 中,由人目視判斷並量測特徵點,此法難以精確決 定特徵點的中心位置,如圖 1 所示,在局部放大的 離散點雲中,難以精確量測角面特徵點位,其量測 點和實際物面對應的特徵點間易存有顯著偏差。但 是,藉由幾何條件的運用,這些特徵點可改用(半)
自動方法來求定之,以做為較可靠、精確的連結點 之用。故以各個測站間共軛的三個交會平面之交點 做為連結點,就是本文所稱的「角面特徵點」,如:
建物屋角點,使用它們來進行幾何約制以統一多個
點品質不佳、點數少、或分佈位置不佳的情況,導 致坐標系統的轉換精度不佳,所以本文以加入適當 的「虛擬角點」之構想來解決此一問題。
使用角面特徵點連結多個地面雷射掃瞄測站 之點雲資料時,由於角面特徵點是由三個平面交會 而得,故本文先探討被掃瞄物體表面局部平面上的 點雲擬合一個數學平面之方法,並分析其實際的擬 合精度,進而求定角面特徵點的坐標與其後驗中誤 差。而在多測站連結實驗部分,將連結點分為角面 特徵點和加入虛擬角點兩種情形,進行測站連結、
成果比較與分析。
圖 1. 在實際光達點雲中,人工量測角面特徵點之困難性
2. 最小二乘擬合平面之求 定與精度分析
本文的構想是以角面特徵點做為連結點,它是 近似垂直交會的三個平面之交點,先圈選出屬於同 一個局部平面上的點雲後,再進一步萃取角面特徵 點做連結之用,因此,本章目的在於探討不同的掃 瞄條件與擬合平面精度之關係,以提供後續評估角 面特徵點精度之用。
將落在同一個局部平面上的光達觀測點群 以最小二乘平差法來求定擬合平面,(1) 式 表 達此 一平 面 ,任 一點 Pi 的 坐標 觀 測值 為
,歸項整理(1)式,可得(2)式。
0 )
( ) (
)
(x +v +B y +v +C z +v +D=
A i x i y i z (1)
i i
i
i By Cz D v
Ax + + + =0+ (2)
依據最小二乘原理,令各點至擬合平面的距離 之平方總和為最小,將距離公式取平方,如(3)式所 示。
( )
2 2 2 2 2 2
2
2 2
2 A B C
v v C
B A
D Cz By d Ax d C B A
D Cz By
d Ax i i i i i ii
i i i
i = + +
+ +
+ +
= + + ⇒
+ + +
= + (3)
平面參數A、B、C、D 為未知數,其中,A、B、C 為組成平面法向量的三個分量,實務上,此一待求 定的平面甚少恰巧通過坐標原點,即 D 值常不為 零,因此,我們假設 D≠0,並且將這四個平面參 數做一尺度調整,使得D=1,則平面參數縮減為 3 個,且(2)式為線性,可直接求解。對參與平差計算 的點群 而言,A、B、C 為待定的常數,所
蔡展榮、李姝儀:萃取物表角面特徵點供多測站地面光達點雲面之連結 341
以 ( 3 ) 式 的 分 母 A2+B2+C2 為 一 常 數 , 此 時 , 的 條 件 等 義 於 , 且 間 接觀測平差的基本式V=Ax+L 如(4)式所示(Akca,
2003;湯凱佩、等,2004),其中,假設權矩陣 P 是一個單位方陣。
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡ +
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
′
′
′
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡
=
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡
1 1 1
2 2 2
1 1 1 2 1
M M
M M
M C
B A
z y x
z y x
z y x
v v v
n n n n
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡
=
1 0 0
0 1 0
0 0 1
L M O M M
L L P
(4)
因為已先將 D 約制成 1,所以最後得到的平面 參數 A′、B′、C′和原法向量三分量 A、B、C 間存 有一定比例的關係。
本文在 InnovMetric 軟體之 IMInspect 模組下,
以人工圈選方式來選出位於同一個局部平面上的 點群,可能的圈選錯誤、光達點內含的各式誤差(隨 機偶然誤差、系統偏差、錯誤),所以必須進行剔 點處理;取各點到擬合平面距離之均方根值的三倍 做為門檻值,若大於門檻則視為錯誤點。剔除錯誤 點後,再進行一次最小二乘平差(LSA),重覆此一 計算處理,直到全部點到擬合平面的距離皆小於門 檻值為止,即可得擬合平面的參數。剔點後,各點 至擬合平面距離之均方根值,以下全文皆以 RMSD 表示之。
根據本文實際研究經驗,一般情況下,剔點率
(剔點數/圈選點數)在 1%以內,但若掃瞄方向與 平面接近平行時,則剔點率高達 10%左右。由於角 面特徵點多位於建築物細部結構上,可用來擬合平 面的雷射點分佈範圍小且點數較少,以本文各項真 實建物實驗為例,點數約在 30~2500 點左右,依 各角面特徵結構不同而異,而 LSA 計算次數在 1~3 次。但在分析擬合精度的實驗中,由人工盡量圈選 落在全開紙張或是實驗桌面上所有的雷射點,所取 的雷射點分佈範圍較廣,約 1m2且點數多,掃瞄距 離 5m~100m 間,同一個掃瞄區的點數約 3 千~30 萬點間,計算次數 1~5 次,當掃瞄距離 5m 時,計 算次數 4 次,而掃瞄距離 100m 時,計算次數 1 次
(即:全部點均合格,不需剔點)。而在約 4m 之 近距離下,不同掃瞄方向下(請參閱圖 8),擬合 平面計算次數在 4~13 次之間,平面與掃瞄方向接
近垂直時,計算 4 次,當平面與掃瞄方向接近平行 時,計算 13 次。
另外,地面雷射掃瞄儀對地物掃瞄,每一個雷 射點在掃瞄儀坐標系下的三維坐標 是由 斜距 s'及掃瞄向量在兩個正交方向上的方向角
W1、W2計算而得,如(5)式(Thiel and Wehr,2004),
斜距s'是由雷射光發射和接收的時間差 t 之半再 乘上光速c 而得。
) cos(
'
) cos(
) sin(
'
) sin(
) sin(
' ' 2
1
2 1
2 1
W s z
W W
s y
W W
s x
c t s
p p p
=
×
=
×
=
×
=
(5)
從點位三維坐標公式(5)可知,點位坐標誤差來 源包括掃瞄距離誤差及掃瞄角度誤差。其中,掃瞄 角度包含了二個分量:雷射掃瞄儀之掃瞄線至感測 器坐標系統 z 軸之夾角W1(垂直角)、以及掃瞄線方 向向量在 xy 平面上的投影分量與+y 軸之夾角 W (水平角)。另外,掃瞄過程中的瞬間旋轉角度增2
量θ決定點雲資料的點間距,即所謂的掃瞄間距。
本文使用的角面特徵點是三個交會平面的共同交 點,角面特徵點之精度受這三個擬合平面的精度之 影響,故此節將分析與驗證不同的掃瞄條件對擬合 平面精度之影響。
2.1 掃瞄距離與擬合平面精度 的關係
本節探討不同的掃瞄距離對點雲擬合平面之 精度的影響。在此實驗中,選定一個垂直於地面的 平坦水泥牆面做為實驗對象,並考量一般在城市區 對建物掃瞄時,很少有掃瞄距離會超過 100m 的情 形,所以,在實驗設計時,原則上以 10m 為間隔,
分別在 5m、10m、20m 最遠至 100m 的距離下,以 掃瞄儀所能提供的最密的掃瞄間距進行掃瞄,即每 2mm~16mm 一個掃瞄點,相同的瞬間旋轉角度增量 弳度,如圖 2 所示,在水泥牆貼上大小 為 78.7cm×109cm 的米白色紙,總共 11 個測站,掃 瞄點數為 3320~301280 點。
圖 2. 點雲擬合平面精度實驗示意圖 圖 3. 米白色紙區(圓圈內的矩形區)與 背景牆面區的光達回波強度不同
圖 4. 掃瞄距離 S 與 RMSD 值之關係 圖 5.掃瞄距離 S 與比值 RMSD/S 之關係
如圖 3 所示,藉由光達回波強度之不同來區別 落在水泥牆和色紙上的點雲,由人工選取色紙上的 點雲,進行最小二乘擬合平面之計算,並且經過剔 錯處理後,可得到 RMSD 值、及 RMSD 值與掃瞄 距離 S 之比值(RMSD/S),如圖 4 及 5 所示,從關 係折線圖 4 可知,掃瞄距離越遠,擬合平面精度指 標 RMSD 值也越大。而圖 5 顯示掃瞄距離 S 大於 50m 時,RMSD/S 之比值約收斂於常數 0.00015,它 近 似 等 於 雷 射 掃 瞄 儀 瞬 間 旋 轉 角 度 增 量
,兩者是否相關,尚待研究。另外,觀 察各點到擬合平面的距離向量
dri得知,大部份的
|
dri|
趨近於 0,正、負dri出現機率相近且具隨機性。
2.2 掃瞄密度與擬合平面精度 的關係
此節將分析掃瞄密度對點雲擬合平面精度之 影響,所謂不同掃瞄密度指的是不同的瞬間旋轉角 度增量 θ,如圖 6 所示,其中 V、H 分別是垂直、
水平掃瞄視角。雖然儀器提供的選單為經過掃瞄距 離換算後的點間距,不是原始的瞬間旋轉角度增量 θ,不過仍可由掃瞄距離和已知點密度去推估 θ 值。另外,垂直和水平掃瞄視角(V、H)分別是掃瞄 儀器所能設定垂直及水平方向的最大掃瞄角度,以 ILRIS-3D 為例,垂直及水平方向 -20°~+20° 為可掃 瞄區。
蔡展榮、李姝儀:萃取物表角面特徵點供多測站地面光達點雲面之連結 343
圖 6. 地面雷射掃瞄儀的掃瞄角度參數
圖 7. 在掃瞄距離 S=5、20、40、60、80、100m 下,掃瞄密度與擬合精度之關係
本節實驗設計,分別在 5m、20m 及 40m 處,
共 3 個測站分別以四種不同掃瞄密度掃瞄。圖 7 顯 示掃瞄密度與 RMSD 值的關係折線,其中,掃瞄 密度是從儀器選單中設定,表示掃瞄距離上的概略 點間距。從圖 7 中,可以發現在相同掃瞄距離下,
不 同 的 掃 瞄 密 度 的 RMSD 值 之 差 值 Δ 在 0.15~0.5mm 間,相較於 RMSD ,顯示Δ 並不顯著。又在掃瞄距離 60m、80m 及 100m 分別
以三種不同掃瞄密度掃瞄,分析得Δ在 0.7~1.4mm 間,相較於 RMSD ,顯示Δ也不顯著。
換言之,只改變掃瞄密度,則 RMSD 值幾乎不變;
相同的掃瞄距離,其擬合精度也趨近相同。另外,
為避免如圖 9 所示的邊界效應之影響,選點時儘量 不要圈選邊界附近的點群,才能得到良好精度的擬 合平面。
圖 8. 不同掃瞄方向之測站位置俯視圖(左);測站坐標系統xyz、平面法向量OP之幾何 關係,α、β分別是水平角、垂直角(右)
圖 9. 講桌邊界附近的點雲俯視圖:水平角α趨近於 0°(左)、80°(右)
2.3 掃瞄方向與擬合平面精度 的關係
此節探討掃瞄方向與擬合平面精度之關係,實 驗設計如下:將木製講桌做為掃瞄對象,且在室內 環境固定測站至被測面之距離,約為 4m 之近距離 掃瞄,不移動講桌,只改變測站位置,期望能得到 儀器中心掃瞄方向與平面 P 法向量形成不同夾角 之掃瞄成果,一共有 11 個測站,即 11 個不同的掃 瞄方向,如圖 8(左)所示,依序掃瞄。儀器螢幕 顯示的可掃瞄區之中心位置,本文稱此一位置的掃 瞄方向為「中心掃瞄方向」,它近似等於測站坐標 系的+y 軸之方向。實際操作時,從測站沿虛線至 桌面為掃瞄方向,將中心掃瞄方向大略對準平面 P 的中心位置。由操作人員盡量圈選出位於平面 P 上所有的點,並經過剔點處理後,以最小二乘平差 計算平面參數,可平移擬合平面之法向量使其通過 坐標原點 O,計算 α、β 兩角度,水平角 α 是 OQ 和+y 軸之夾角,而垂直角 β 為OP、OQ 兩向量夾
角,如圖 8(右)所示,其中,OP表示擬合平面 P 的 法向量方向,OQ 是OP在儀器坐標系統 xy 平面上 的投影分量。
如圖 10 所示,各測站掃瞄方向的水平及垂直
角度為 、 ,相鄰測站
水平角度差Δα約 15°,且絕對值相等的正負水平 角度有相對應的兩測站,如測站 1 與測站 11,測 站 2 與測站 10 相對應。雷射測距的誤差方向落在 觀測方向上,當觀測方向垂直平面 P 時,雷射光垂 直平面,α=0°,雷射測距誤差方向也垂直平面 P,
此時的雷射測距誤差可完全反映在擬合平面的 RMSD 值上。反之,當觀測方向不垂直平面 P 時,
雷射光不垂直平面,α≠0°,只有雷射測距誤差的 cosα 分量可反映在擬合平面的 RMSD 值上。因 此,如實驗成果圖 10 所示,cosα函數曲線是以測 站 6(α
≈
0.9°)之 RMSD 值分別乘上各測站水平角度 α之 cos 值而得,與各測站的 RMSD 值做比較,明 顯可知兩者的趨勢一致。換言之,各測站的擬合平 面精度 RMSD 值與水平角度α的 cos 值成正比。蔡展榮、李姝儀:萃取物表角面特徵點供多測站地面光達點雲面之連結 345
圖 10. 實際掃瞄方向與 RMSD 值關係折線圖之趨 勢和 cosα 函數一致
3. 求定物空間三平面 之交點
本文使用的角面特徵點是以彼此近似正交的 三個交會平面之交點為主,例如屋角點,由人工選 取落於角面特徵上的平面點群,分別計算出組成角 面特徵的三個平面之平面參數,再求得此三面的交 點,如圖 11 所示,同時計算交點坐標之精度,將
其精度做為連結時給權的依據。
實務上,理想的角面特徵是三個平面的點雲結 構完整良好、無遮蔽問題、且落在平面上的雷射點 數夠多、均勻分佈於較大的正方形區,如圖 12 所 示之一例,是一個較理想的角面特徵點。而大部分 的角面特徵點是位在建物外牆的突出部分,如窗 台、樑柱等,而組成這些角面特徵點的三平面,通 常因為掃瞄方向、掃瞄密度或遮蔽,造成某個面上 的雷射點數相較其他兩個面少的情況發生,如圖 13 所示之一例,S3 的結構屬於狹長形,因為受掃 瞄方向的影響,不易有雷射點落在 S3 上,故 S3 上的雷射點明顯比 S1、S2 少。
圖 11. 角面特徵點 PC
(a) 成大鐘樓影像 (b) 局部點雲放大 圖 12. 理想角面特徵點--成大鐘樓為例
(a) 測量系館影像 (b) 局部點雲放大 圖 13. 三個交會平面上的點數差距懸殊之角面特徵—成大測量系館外牆面
圖 14. 虛擬角點 PV
(a) 成大鐘樓影像 (b) 局部點雲放大 圖 15. 虛擬角點之一例
在角面特徵點品質不佳、點數少、或分佈不佳 的情況下,除了建物上真實存在的角面特徵點外,
亦可以使用如圖 14 所示的「虛擬角點」,其中,S1 及 S2 是真實建物的兩個相鄰面,而 S3 為另一個物 體上的平面多邊形,與 S1、S2 不相交,或是因遮 蔽導致 S3 與 S1、S2 之間無光達點,此時,圖中虛 線代表 S3 的延伸面,S1、S2 及 S3 可交會出PV,
稱之為虛擬角點,真實物面的角面特徵點並不包含
PV此點,但在真實空間中,S1、S2 及 S3 之幾何 關係是固定的,暫不考慮誤差問題下,「外插」交 會出的PV點也是固定的,所以考量局部光達點的 相對精度,只要外插的偏差不顯著,即 S1 和 S2 的交線夠接近平面多邊形 S3,使得 S3 的求定精度 換算到該交線上的大小仍落在局部光達點相對精 度的可容許範圍時,則PV點仍可做為適當的連結
點之用,俾以增強多測站連結的幾何強度。
圖 15 顯示虛擬角點之一例,S1、S2 為成大鐘 樓上垂直於地面的水泥牆面,S3 為地面之水泥地 板,此三面的交點不在物體表面上,但此三面之延
伸面可以交會出虛擬角點PV。
點雲擬合平面之最小二乘平差計算,它假設選 取的點群均落在一個絕對平面之真實物面上,但 是,真實物面常常不是一個理想的絕對平面,而且 光達點必含有誤差,所以擬合平面和真實物面間存 有偏差,則再以平面去交會角點時,角點也會有偏 差。
最小二乘平差計算可分別求得每一個擬合平 面的擬合精度估值,如(6)式所示:
t n
v vi i
j
−
= Σ ˆ
0σ
(6)其中,而n 為各平面上的點數,t 為必要觀測 數,通過不共線的三個點可決定一個平面,故 t=
3。欲求定物空間近似垂直交會的三平面之交點位 置,可由三個平面方程式聯立求解。假設 S1、S2 及 S3 三平面之交點為 ( , , )
C C C
C x y z
P ,此時的平面
參數 Aj、Bj及 Cj為已知,j=1~3,三個未知數,三 個條件式,可求得唯一解,如(7)式所示。
蔡展榮、李姝儀:萃取物表角面特徵點供多測站地面光達點雲面之連結 347
0
3 2 1
3 3 3
2 2 2
1 1 1
=
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡ +
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
D D D
z y x
C B A
C B A
C B A
C C C
(7)
由(7)式可得(8)式:
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
−
−
−
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
=
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
3 2 1 -1
3 3 3
2 2 2
1 1 1
D D D
C B A
C B A
C B A
z y x
C C C
(8)
最後,根據誤差傳播公式,可得PC(xC,yC,zC) 之坐標精度估值。
4. 多測站連結之實驗成果
為了分析多測站地面光達點雲面的相對連結 精度,避免地控點的誤差影響分析,所以本文不採 用地控點,只進行最小約制條件之套合計算,單純 以各測站的局部平面點雲交會而得到的角面特徵 點且依其坐標之後驗中誤差給權,對各測站間的同 名點群做套合,藉以計算各測站間的轉換參數,並 依多測站連結成果分析各測站間所得的角面特徵 點是否存在顯著的偏差以及影響多測站連結精度 的原因。
4.1 多測站連結的數學模式
本文採用三維正形變換(3D conformal transform) 來將各個 LIDAR 測站坐標系統轉換至同一個測站 坐標系統中,它包含七個坐標轉換參數,分別為:
比例尺因子λ、旋轉角Φ、Ω、Κ、及平移量 XG、 YG、ZG。因為它是一個非線性函數,因此平差計算 前必須先給定未知參數的起始近似值。為此,本文 將輸入的第 1 測站視為參考站,在連結測站 1、2 時,使用兩測站全部的連結點來求定測站 2 轉換到 測站 1 的轉換參數近似值(詳請參閱(李姝儀,2005)
附錄),並將測站 2 經坐標轉換至測站 1 的坐標系 後,可將測站 1 和 2 視為一個新套接而成的參考站 1',再以測站 3 與參考站 1'兩測站全部的連結 點求定轉換參數近似值,藉以將測站 3 轉至參考站 1',依此類推,完成各測站轉換到測站 1 的坐標
轉換參數的近似值之求定。此時,使用(8)式計算出 的各測站連結點的原始測站坐標值,將它們視為觀 測值,建立觀測方程式如(9b)。
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
1 1 1
i i i
Z Y X =λR
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
j i
j i
j i
Z Y X
+
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
G G G
Z Y X
⎥⎥
⎥⎥
⎦
⎤
⎢⎢
⎢⎢
⎣
⎡
+ + +
j i j i
j i
Z j i
Y j i
X j i
v Z
v Y
v X
=
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
−
−
−
G i
G i
G i T
Z Z
Y Y
X X R
1 1 1
1 λ
(9a)
(9b) 其中 R=
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
Ω Φ Κ Ω Φ + Κ Φ
− Κ Ω Φ + Κ Φ
Ω
− Κ
Ω Κ
Ω
Ω Φ
− Κ Ω Φ
− Κ Φ
− Κ Ω Φ
− Κ Φ
cos cos cos sin cos sin sin sin sin cos cos sin
sin cos
cos sin
cos
cos sin cos sin sin sin cos sin sin sin cos cos
) , ,
(Xi1Yi1 Zi1 、(Xij,Yij,Zij)分別表示第i 個共 同點在第 1 個、及第j 個測站的坐標值,R 為旋轉 矩陣,λ 為比例尺因子,XG、YG、ZG為平移量。
在第 1 測站分別固定 2 及 3 個品質良好的連結點之 坐標觀測值(X,Y)及 Z,視為 2 個平控點及 3 個高控 點,以做為最小約制條件。除了前述的固定點外,
測站 1 的其他連結點與其它測站的連結點之觀測 方程式,給定權值的方式如下:
1. 第一次迭代使用每一個點坐標的中誤差
σ
ˆX、σ
ˆY、σ
ˆZ及它們的平均值σ
代入(10)式來給定其權值。
2 2
ˆX pX
σ
= σ ,
2 2
ˆY pY
σ
=σ , 22
ˆZ pZ
σ
=σ , (10)
2. 第二次(含)以後的迭代計算中, 如果第一 次迭代後的點位坐標改正數 vX、vY、vZ之絕對 值大於
σ
,則採用(11)式來給權。2 2
X
X v
p
= σ
, 2
2
Y
Y v
p
= σ
, 2
2
Z
Z v
p
= σ
(11)
如果點位坐標的改正數 vX、vY、vZ之絕對值小 或等於
σ
,則採用(10)式給權。4.2 引入虛擬角點做為連結點
本實驗掃瞄對象為成大鐘樓,屬於小型的人造
的表面點雲資料,兩相鄰測站有足夠的重疊區,且 兩測站間至少需有三個共軛點才能求解七個坐標 轉換參數。此實驗只對兩測站點雲進行連結。此兩 測站點雲之掃瞄距離各為 38m 及 30m,掃瞄密度皆
均距離,掃瞄密度則是指掃瞄距離上的相鄰點間 距。掃瞄站之影像與連結點之分佈,如圖 16 所示,
其中 6 個實心點為角面特徵點,3 個空心點為虛擬 角點。
圖 16. 掃瞄站 1(左)、2(右)之影像與連結點的分佈
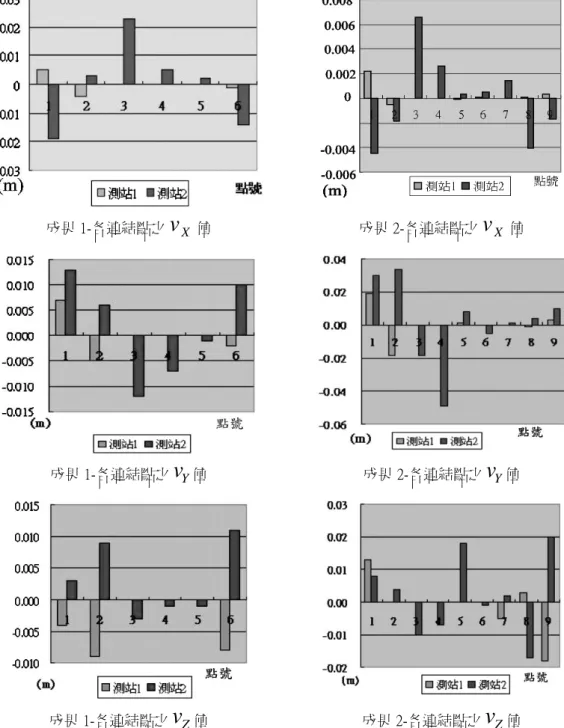
圖 17. 成果 1、2 之vX、vY、vZ及v0之均方根值
圖 18. 成果 1 及成果 2 之轉換參數精度比較
蔡展榮、李姝儀:萃取物表角面特徵點供多測站地面光達點雲面之連結 349
在這兩個測站中,總共使用 9 對共軛點對,其 中 6 對(點號 1~6)為被測物表面之角面特徵點,
3 對(點號 7~9)為虛擬角點,平面控制點為 3、
4,高程控制點為 3、4、5。只以角面特徵點連結 得 成 果 1 , 平 差 後 點 位 坐 標 改 正 數 向 量 長 度
(v0 = v2X +vY2 +v2Z )之均方根值為 1.4cm,而成 果 2 引入虛擬角點,其坐標改正數向量長度(v0) 之均方根值為 3.3cm,此兩種情形下,連結點在 X、
Y、Z 軸方向上的改正數
v
X 、v
Y、v
Z之均方根 值及轉換參數精度,如圖 17、18 所示。成果 1 及 2 的 比 例 尺 因 子λ±σ ˆ
λ 分 別 為 1.005±0.07 及 1.014±0.04,兩者均近似等於 1。在實務上,會有測站不易找到夠多的角面特徵 點,或受到掃瞄角度的影響,點位容易集中在被測 物的某一個表平面上,造成轉換參數的精度不佳,
而引入虛擬角點可以提供新的連結點群,改善連結 點的幾何分佈強度,提升轉換參數的精度,如圖 18 所示,可知引入虛擬角點後,能改善相關的轉 換參數之精度(例如
σ
Φ、σ
Ω、σ
ZG)。在室內 10m 掃瞄距離下,以 ILRIS-3D 重複掃 瞄,則點之坐標精密度約±0.8~1.2cm(賴志凱,
2004),在此實驗中,由平面參數誤差傳播所得的 角面特徵點與虛擬角點之坐標中誤差約為±0.5~
2cm,兩者之坐標中誤差無明顯的差異。本次實驗 在只使用 6 對共軛角面特徵點為連結點的情況 下,各點v0之值在 1.0 ~ 2.5cm 之間,平差後兩測 站各角面特徵點
v
X、v
Y、v
Z,如圖 19 所示,各 點之|v
X |小於 2.5cm,|v
Y |與|v
Z |均小於 1.5cm,表示相鄰測站間的共軛角面特徵點具有 cm 級的套 合精度。另外,圖 19 也顯示出,引入虛擬角點後,
改正數
v
X、v
Y、v
Z之均方根值變大,而兩測站上角 面 特 徵 點 之
v
X、v
Y 、v
Z 的 均 方 根 值 也 從 6mm~1cm 增加至 1cm~2.5cm,表示在兩測站間以三 平面外插所交會出的共軛虛擬角點之點位一致性 不如角面特徵點,才會使坐標改正數增大。為了進一步了解加入虛擬角點對多測站連結 的影響,改以只使用點號 1~4 為連結點,及點號 1~4 再加入點號 9(虛擬角點)分別為成果 3、4。
連結後,點位坐標改正數向量長度(v0)之均方 根值分別為 1.1cm 與 1.2cm,而各角面特徵點在 X、
Y、Z 軸方向上的改正數
v
X、v
Y、v
Z之均方根值 比較,如圖 20 所示。另外,兩測站間的比例尺因 子分別為 λ±σ ˆ
λ=0.9998±0.200 及 1.0002±0.129,近似等於 1,所得之轉換參數中誤差如圖 21。
成果 3、4 使用的 4 個角面特徵點近似分布於 同一個平面上,而成果 4 引入了能提升點位分布強 度的虛擬角點(點號 9),平差後,兩者的改正數向 量長度之均方根值接近相等,加入虛擬角點後,平 移參數精度σXG、σYG、σZG從±0.29m~0.92m 提高 至±0.1m~0.42m,角度參數精度
σ
ˆΦ、 σ
ˆΩ、 σ
ˆκ也 從±0.27~0.44 弳度提高為±0.08~0.23 弳度,顯示了虛 擬角點能改善連結點的幾何分布強度,也能提升約 36%~71%之轉換參數精度。換言之,實務上,當角面特徵點數量不足、品 質不佳、或分布位置差的時候,增加其它約制條件 或觀測量以增加連結強度是必須的,例如:加入本 文提出的虛擬角點。雖然各測站的共軛虛擬角點之 一致性不如真實的角面特徵點,但是它們仍然具有 提升多測站連結幾何強度的潛力,解決實務上角面 特徵點數不足或分布不良的問題,以提升轉換參數 的精度。
成果 1-各連結點之
v
X 值 成果 2-各連結點之v
X 值成果 1-各連結點之
v
Y值 成果 2-各連結點之v
Y值成果 1-各連結點之
v
Z值 成果 2-各連結點之v
Z值 圖 19. 平差成果 1 及成果 2 連結點在各方向上的改正數圖 20. 成果 3、4 之
v
X 、v
Y、v
Z及v
0 之均方根值蔡展榮、李姝儀:萃取物表角面特徵點供多測站地面達點雲面之連結 351
圖 21. 成果 3、4 之轉換參數精度比較
4.3 多測站連結實驗成果
本實驗以 ILRIS-3D 地面雷射掃瞄儀取得建物 的點雲資料,而掃瞄對象為成大測量系館,事先規 劃測站的掃瞄位置,雖然受場地遮蔽限制,使得無 法將掃瞄儀架設在理想的測站位置上,但至少兩相 鄰測站仍有足夠的重疊區。
總共以 9 個測站對成大測量系館進行掃瞄,系 館兩側受到場地限制且四周亦受樹木遮蔽影響,不 易取得良好的重疊區,甚至有無法掃瞄到的區域,
掃瞄站和被測物間的位置關係平面圖,如圖 22 所 示,圖中灰色方塊為掃瞄站的概略位置,測站 1 至 測站 7 掃瞄距離約為 30m,測站 8 及 9 約為 65m,
各測站掃瞄密度約每 2~3mm 一個掃瞄點,圖 23 為 9 個測站的連結點分佈位置及測站資料,總共有 30 個連結點,其中虛擬角點有 3 個,其點號為 8、18 及 21。另外,以點號 10、13 兩點為例,這兩點在 測站 3 無遮蔽,是角特徵點,但是它們在測站 4 被 樹木遮蔽,其點位是以其角面特徵之平面上較遠處 的點群所交會而得,是虛擬角點。
首先,以連結測站 1 至 5 為例,各測站的掃瞄 方向皆不盡相同,但掃瞄距離大約一致,測站 1 與 測站 2 之連結點皆為真實的角面特徵點,無遮蔽,
且交會條件良好,而測站 3、4、5 則受遮蔽影響大,
部分連結點是採用離真實面上的特徵角點較遠的 點雲交會而成的。這五個測站進行最小約制的七參 數轉換之結果如表 1,平差計算時選擇測站 1 中的 5、6 為平面控制點,2、5、6 為高程控制點,點位 坐標的改正數向量長度
v
0之均方根值為 30.4cm,其
v
X、 v
Y、 v
Z之均方根值,分別為 7.8cm、26.2cm 與 5.9cm,整體平差的權單位中誤差σ ˆ
0=±5.0cm,多餘觀測數為 38。由表 1 可知,各測站的比例尺 因子可視為等於 1,表示各測站間的尺度一致。
圖 22. 掃瞄測站和被測物間的位置關係俯視
XG (m) YG (m) ZG (m) Φ (弳度) Ω (弳度) Κ (弳度) λ 測
站
σ ˆ
XG(m)σ ˆ
YG(m)σ ˆ
ZG(m)σ
ˆΦ(弳度)σ
ˆΩ(弳度)σ
ˆΚ(弳度)σ ˆ
λ15.641 -12.156 0.521 0.001015 -0.052133 -0.057094 1.003776 2
0.092 0.062 0.039 0.001083 0.000762 0.001835 0.001211 -3.297 24.729 -1.862 0.160407 0.022368 -1.318242 1.025474 3
8.460 11.826 12.926 0.141411 0.292582 0.182124 0.184555 35.530 -13.344 -0.471 0.001843 0.040261 0.033775 1.043260 4
20.352 24.235 9.290 0.200023 0.352281 0.745267 0.487804 58.417 2.542 -1.324 -0.108514 0.029541 0.498024 1.044366 5
28.169 30.842 38.222 0.950858 1.67440 1.121216 0.695549
表 2. 以測站 7 為參考站,測站 8 之轉換參數及其中誤差
XG (m) YG (m) ZG (m) Φ (弳度) Ω (弳度) Κ (弳度) λ 測
站
σ ˆ
XG(m)σ ˆ
YG(m)σ ˆ
ZG(m)σ
ˆΦ(弳度)σ
ˆΩ(弳度)σ
ˆΚ(弳度)σ ˆ
λ42.591 -20.105 0.273 -0.063625 0.003419 0.443916 0.986580 8
1.558 1.270 1.944 0.007671 0.028338 0.025489 0.005824
(測站 1)掃瞄距離:31m,掃瞄間距:19mm (測站 2) 掃瞄距離:34m,掃瞄間距:21mm
(測站 3) 掃瞄距離:29m,掃瞄間距:18mm (測站 4) 掃瞄距離:33m,掃瞄間距:21mm
蔡展榮、李姝儀:萃取物表角面特徵點供多測站地面達點雲面之連結 353
(測站 5) 掃瞄距離:27m,掃瞄間距:21mm (測站 6) 掃瞄距離:26m,掃瞄間距:20mm
(測站 7) 掃瞄距離:33m,掃瞄間距:21mm (測站 8) 掃瞄距離:64m,掃瞄間距:20mm
(測站 9) 掃瞄距離:65m,掃瞄間距:20mm 圖 23. 各測站的連結點分佈位置及測站資料
另外,對測站 7、8 連結,此兩測站之掃瞄距 離相差 2 倍,8、9 兩站掃瞄距離一致,但掃瞄距 離為其他測站 2 倍,觀察掃瞄距離是否會影響各測 站間的比例尺因子之一致性。兩者得到的轉換參數 及中誤差,如表 2 及表 3 所示。
由於測站 7 和 8 間的掃瞄距離相差 2 倍,從表 2 可以看出,比例尺因子λ±
σ ˆ
λ約為 0.987±0.006,顯示在掃瞄距離相差 2 倍的情形下,兩測站 7 和 8 之尺度因子之值仍可視為 1;而其平移參數的中誤 差達±1.3~1.9m,點位坐標的改正數長度
v
0之均方 根值為 15.2cm,v
X、 v
Y、 v
Z之均方根值為 10.8cm、6.7cm、3.6cm,整體平差的權單位中誤差σ ˆ
0為±1.5cm,多餘觀測數 11。測站 8 和 9 的掃瞄距離 相近,其比例尺因子可視為 1,平移參數的中誤差 為±16~44cm,點位坐標的改正數向量長度
v
0之均 方根值為 4cm,其v
X、 v
Y、 v
Z之均方根值,則分別為 3.2cm、0.6cm 和 0.2cm,而
σ ˆ
0為±8.0cm,多餘觀測數 5。
連結 7~9 測站之轉換參數及中誤差,如表 4 所 示,比例尺因子約為 0.99±0.08,同樣的可將尺度因 子視為 1,但平移參數的中誤差為±1.35~29.28m,
在表 3 中可知測站 8、9 連結的平移參數中誤差為±
16~44cm,而這裡之平移參數之中誤差顯著增大為±
1.3~29.3m,而各點位坐標的改正數向量長度
v
0之值分別為 9.3cm、6.5cm、2.9cm,
σ ˆ
0則為±1.2cm,多餘觀測數 19。
最後,連結測站 1~9,由於連結此 9 個測站並 無使用地控點,它是一個展開的模型連結,如表 5 及圖 24 所示,轉換參數之中誤差值會隨著測站數 的 5~7 次方快速遞增,坐標改正數向量長度
v
0之 均方根值為 23.2 cm,而在 X、Y、Z 軸方向上的改 正數v
X、 v
Y、 v
Z之均方根值分別為 14.8cm、16.5cm 及 3.3cm,而
σ ˆ
0為±3.0cm,多餘觀測數 64。表 1~5 驗證了在展開式的多測站連結中,誤差 會逐站累積。故這裡以相鄰兩測站連結來觀察共軛 角面特徵點群在各測站裡的相對位置之一致性,得 到的連結點各方向坐標改正數 RMS 值,如表 6;
而表 7 則為相鄰兩測站之轉換參數及轉換參數中 誤差。從表 6、7 可知,單以相鄰兩測站連結,所
向、距離相近且點位分佈良好,可得公分級的坐標 改正數 RMS 值,如測站 1+2、2+3 及 8+9 之連結,
其中測站 1+2 的連結點分佈非集中在一同平面 上,故有最佳之轉換參數精度,平移參數之中誤差 在±5cm 以下。反之,如測站 3+4、測站 5+6 及測站 7+8,掃瞄方向差異大,而測站 4 中又受遮蔽影響,
使交會出的連結點點位精度差,而測站 5、6 所能 使用的角面特徵點只有 3 個,沒有多餘觀測數,且 分佈集中於建物下方,使轉換參數中誤差之精度不 佳,連結點之
v
0均方根約 18cm,表示此兩測站的 連結點間存有偏差,且轉換參數成果顯著不佳。由 此三組成果的轉換參數來看,可以發現掃瞄方向不 一致時,轉換參數的精度較差。而測站 7+8 則是兩 測站距離相差兩倍,故其坐標改正數 RMS 約 15cm。表 3. 以測站 8 為參考站,測站 9 之轉換參數及其中誤差
XG (m) YG (m) ZG (m) Φ (弳度) Ω (弳度) Κ (弳度) λ 測
站
σ ˆ
XGσ ˆ
YGσ ˆ
ZGσ
ˆΦσ
ˆΩσ
ˆΚσ ˆ
λ32.008 5.360 -0.514 -0.039694 -0.109686 0.179792 1.000642 9
0.207 0.163 0.440 0.002767 0.006718 0.003416 0.001609
表 4. 以測站 7 為參考站,測站 8、9 之轉換參數及其中誤差
XG (m) YG (m) ZG (m) Φ (弳度) Ω (弳度) Κ (弳度) λ 測
站
σ ˆ
XG(m)σ ˆ
YG(m)σ ˆ
ZG(m)σ
ˆΦ(弳度)σ
ˆΩ(弳度)σ
ˆΚ(弳度)σ ˆ
λ42.521 -20.131 0.147 -0.064136 0.005142 0.443078 0.986668 8
1.351 1.041 1.867 0.005967 0.027725 0.021714 0.003845 68.967 -1.678 -2.999 -.055173 -.094520 0.618022 0.985588 9
12.458 11.080 29.284 0.069268 0.449803 0.226790 0.078790
蔡展榮、李姝儀:萃取物表角面特徵點供多測站地面達點雲面之連結 355
表 5. 以測站 1 為參考站,測站 2~9 之轉換參數及其中誤差
XG (m) YG (m) ZG (m) Φ (弳度) Ω (弳度) Κ (弳度) λ 測
站
σ ˆ
XG(m)σ ˆ
YG(m)σ ˆ
ZG(m)σ
ˆΦ(弳度)σ
ˆΩ(弳度)σ
ˆΚ(弳度)σ ˆ
λ15.497 -12.245 0.639 0.004 -0.054 -0.060 1.002 2
0.138 0.090 0.096 0.002 0.002 0.003 0.002 -4.549 26.285 -.814 0.135 -0.030 -1.384 1.008 3
46.695 63.635 65.563 1.726 3.025 2.169 1.268 28.214 -17.411 0.680 -0.016 0.015 -0.122 0.989 4
85.313 69.099 81.602 1.577 1.654 1.636 1.317 54.385 -4.605 -0.970 -0.126 0.017 0.333 0.994 5
85.828 79.653 67.272 1.873 1.942 1.972 1.639 81.032 29.182 -1.162 -0.047 -0.030 1.352 0.986 6
145.536 239.861 179.206 4.717 5.079 6.785 3.815 76.089 69.456 -0.211 0.069 -0.035 2.206 0.969 7
426.155 417.391 566.342 10.445 10.466 12.316 4.304 59.036 117.995 -5.596 0.071 -0.115 2.752 0.965 8
1232.756 464.050 922.254 10.334 10.771 15.182 5.194 26.675 125.138 -9.711 0.145 -0.034 2.936 0.967 9
3258.276 1288.917 5397.216 53.550 63.536 42.894 17.643
表 6. 相鄰兩測站連結後的各方向坐標改正數 RMS 值
測站 Rms_vX (m) Rms_vY(m) Rms_vZ(m) Rms_v0(m)
σ ˆ
0(m)1+2 0.004 0.010 0.008 0.015 0.011 2+3 0.058 0.013 0.007 0.078 0.046 3+4 0.083 0.056 0.077 0.140 0.012 4+5 0.010 0.017 0.005 0.023 0.020 5+6 0.115 0.103 0.038 0.182 1.039 6+7 0.096 0.213 0.080 0.280 0.154 7+8 0.108 0.06691 0.036 0.152 0.015 8+9 0.032 0.006 0.002 0.040 0.008
圖 24. 展開式的多測站連結誤差會逐站快速遞增
表 7. 相鄰兩測站之轉換參數及其中誤差
XG(m) YG(m) ZG(m) Φ(弳度) Ω(弳度) Κ(弳度) λ 測
站
σ ˆ
XG(m)σ ˆ
YG(m)σ ˆ
ZG(m)σ
ˆΦ(弳度)σ
ˆΩ(弳度)σ
ˆΚ(弳度)σ ˆ
λ15.638 -12.329 0.471 0.002591 -0.051092 -0.057697 1.000301 1+2
0.042 0.033 0.049 0.001310 0.001022 0.000858 0.000648 13.138 -4.029 0.489 0.004330 0.061356 -0.060548 0.995605 2+3
0.402 0.019 0.304 0.001735 0.006163 0.00716 0.001240 43.469 22.104 -16.031 -0.297811 0.123824 1.214020 1.047967 3+4
26.605 51.614 23.219 0.510680 0.694500 1.091140 0.417496 24.350 15.792 -1.627 -0.112483 -0.006686 0.547497 1.002322 4+5
0.580 0.694 0.532 0.010051 0.017113 0.019602 0.015553 37.213 24.283 3.570 0.066017 -0.135699 1.062096 0.963578 5+6
193.485 459.939 270.049 4.870731 10.305980 13.243220 5.374228 37.703 12.045 -1.601 -0.040052 -0.053962 0.831769 0.964588 6+7
14.407 15.789 27.670 0.556429 0.396274 0.479253 0.111139 42.591 -20.105 0.273 -0.063625 0.003419 0.443916 0.986580 7+8
1.558 1.270 1.944 0.007671 0.028338 0.025489 0.005824 32.008 5.360 -0.514 -0.039694 -0.109686 0.179792 1.000642 8+9
0.207 0.163 0.440 0.002767 0.006718 0.003416 0.001609
蔡展榮、李姝儀:萃取物表角面特徵點供多測站地面達點雲面之連結 357
5. 結論與建議
本文提出一個半自動化的方法,它是從雷射點 雲萃取被掃瞄物表面上的局部角面特徵點並求定 其三維坐標,進而將這些共軛角面特徵點群做為連 結點,把多個光達測站點雲轉換到同一個物空間坐 標系統中,俾行資料連結整合之用。然而,在實務 上,會有遮蔽、掃瞄方向、掃瞄距離、掃瞄視角之 限制,造成角面特徵點品質不佳、點數少、或分佈 不佳的情況,所以本文以加入適當的「虛擬角點」
的構想來解決此一問題。
本文實驗成果顯示:
1. 雖然由平面多邊形區的點雲外插得到的各測 站的虛擬角點之一致性不如角面特徵點,但 是,在角面特徵點品質不佳、點數少、或分佈 不佳的情況下,加入適當的虛擬角點可改善連 結點的分佈強度,使得相關的測站坐標轉換參 數精度可提升 36%~71%,確實具有改善轉換參 數的精度之潛力,以解決實務上角面特徵點品 質不佳、點數少、或分佈不佳的問題。
2. 在 100m 的掃瞄距離內,局部平面上的雷射掃 瞄點到擬合平面距離之均方根值 RMSD 為 5mm~1.5cm;掃瞄距離 S 愈遠,則 RMSD 值會 隨著增大,當 時,RMSD/D 比值趨近 於常數約 0.00015,它近似等於雷射掃瞄儀瞬間
旋轉角度增量 ,兩者是否相關,尚
待研究。換言之,相同掃瞄方向下,掃瞄距離 越遠,則擬合平面精度越差,但是,兩者比值 卻趨於常數。
3. 在相同掃瞄距離(4m)及掃瞄密度下,掃瞄方向 垂直被測物平面時,得到的點至擬合平面距離 之 RMSD 值為最大,約 7mm,且不同掃瞄方 向的 RMSD 值近似正比於 cosα值,其中,α 是掃瞄方向與平面之法向量的夾角。
4. 在相同掃瞄距離 5m、20m、或 40m 下,不同的 掃瞄密度的 RMSD 值之差值Δ在 0.15~0.5mm 間,相較於 RMSD ,顯示Δ並不顯 著。又在掃瞄距離 60m、80m 及 100m 分別以
三 種 不 同 掃 瞄 密 度 掃 瞄 , 分 析 得 Δ 在 0.7~1.4mm 間,相較於 RMSD ,顯示 Δ也不顯著。換言之,在相同掃瞄距離及掃瞄 方向下,掃瞄密度對擬合平面精度無顯著的影 響。
5. 取各點到擬合平面距離之均方根值的三倍做 為門檻值,若大於門檻則視為錯誤點剔除之。
一般情況下,剔點率(剔點數/圈選點數)在 1%以內,但若掃瞄方向與平面接近平行時,則 剔點率高達 10%左右。
6. 根據擬合平面參數精度與誤差傳播定律,計算 角 面 特 徵 點 的 點 位 坐 標 中 誤 差 多 數 約 為
±1cm~2cm 間,少部分點位受掃瞄方向、遮蔽 之限制,其點位坐標中誤差可達±10cm 左右。
7. 以測量系館為掃瞄對象的實驗成果顯示:
(1) 若能得到良好的連結點位,且掃瞄距 離、掃瞄方向一致,則測站連結精度可 達公分級,如測站 8、9 連結成果,整體 坐標改正數 RMS 為 4cm。
(2) 若掃瞄距離、掃瞄方向差距過大,如 7、
8 兩測站,掃瞄距離約相差 2 倍,則測站 連結後其整體坐標改正數 RMS 增加至公 寸級(15cm)。
(3) 9 個測站之連結是一個非閉合的模型連 結,誤差累積明顯,又加上角面特徵點 角面特徵多位於建物表面上,造成連結 點集中在三維空間中的平面上,使得轉 換參數之精度差,且整體坐標改正數 RMS 為 23cm。
(4) 連結測站 1~9,並無使用地控點,它是一 個展開的模型連結,轉換參數之中誤差 值會隨著測站數的 5~7 次方快速遞增 (5) 掃瞄方向不一致時,光達測站坐標系統
轉換參數的精度較差。
雖然求定角面特徵點可得到高精度的連結點 位,可是受限於掃瞄方向、掃瞄視角及遮蔽等各種 因素,實務上在相鄰兩測站間並不容易得到相對應 的良好角面特徵。建議可以加入其他連結點,如在
連結,應可以改善本文中角面特徵點皆位於建物平 面上,近似在物空間同一平面上,造成轉換參數精 度不佳的情形。或加入其他的連結點,例如,以人 工量測一個特徵點、再加入平行或垂直等幾何約制 條件等,或是可考慮引入其他特徵,如特徵線,做 為輔助連結之用。
本文採用角面特徵點進行多測站連結之演算 法,可進一步擴充為地面多測站點雲或是空載光達 區域整體平差之用。另外,也可更進一步研究自動 化的方法以獲得更多且分佈良好之角面特徵點或
「虛擬角點」。而虛擬角點對多測站連結區域平差 之實際效果,仍待更多實驗成果來加以驗證分析。
誌謝
非 常 感 謝 國 科 會 提 供 補 助 經 費 ( 計 畫 編 號 NSC93-2211-E-006-067),讓本研究得以順利進行,
特此致謝。另外,兩位匿名審查委員提供寶貴的修 正建議使得本文更臻完善,謹此致以由衷謝忱。
參考文獻
曾義星、史天元,2003,”三維雷射掃瞄儀技術及 其在工程測量上的應用”,2005年5月23日下載 自 :http://nhmrc.cv.nctu.edu.tw/People/tyshih/Pu blications/35.pdf
湯凱佩、曾義星,2004,”以八分樹三維網格結構 組織光達點雲資料並進行平面特徵萃取”,第 23 屆 測 量 學 術 及 應 用 研 討 會 論 文 集 , pp.143~150,2004。
賴志凱,2004,”地面雷射掃瞄儀的精度分析與檢 定”,國立成功大學碩士論文。
李姝儀,2005,”從地面雷射點雲萃取物面角特徵 供多測站連結之研究”,國立成功大學碩士論 文。
Akca, D., 2003, “Full automatic registration of laser scanner point cloud.” http://www.
/TS9_5_Akca_neu.pdf. (accessed on 23 Mar.
2005)
Axelsson, P., 1999, “Processing of laser scanner data—algorithms and applications”. ISPRS Journal of Photogrammetry and Remote Sensing 54, pp.138–147.
Dold, C. and Brenner, C., 2004, ”Automatic Matching of Terrestrial Scan Data as A Basis for The Generation of Detailed 3D City Models”.
International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. 35, pp.1091-1096, ISPRS, Istanbul, 2004.
Thiel, K-H. and Wehr, A., 2004, ” Performance Capabilities of Laser-Scanners - An Overview and Measurement Principle Analysis “, Proceedings of the ISPRS working group VIII/2, Laser-Scanners for Forest and Landscape Assessment, Vol. XXXVI, Part 8/W2, pp. 14-18, Freiburg, Oct. 3-6, 2004.
Zhao, H. and Shibasaki, R., 2001, ”A Robust Method for Registering Ground-based Laser Range Images of Urban Outdoor Objects”, PE&RS, Vol. 67, No. 10, pp.1143-1153.
Journal of Photogrammetry and Remote Sensing, Volume 11, No. 4, December 2006 359
Extracting Corner Points for Registration of Terrestrial Multi-Station LIDAR Scanned Surfaces
Jaan-Rong Tsay
1Shu-Yi Lee
2ABSTRACT
Terrestrial laser scanner can rapidly acquire accurate and dense 3D point clouds covering the surfaces of scanned objects such as buildings. The point clouds provide the detailed data necessary for accurate building modeling. In order to acquire complete data points on a scanned building, the scanning operations must be done at more stations. Each station has its own coordinate system representing the 3D position of each laser point. Therefore, all coordinate systems of different laser scanning stations must be transformed into a common system to register laser points acquired on different LIDAR stations.
This paper proposes a semi-automatic method for registration of terrestrial laser point sets acquired on different stations. Firstly, a point cloud on a local plane is selected manually, and then a mathematical plane is fitted in a least squares manner onto them. Three local planes on an object corner are thus respectively determined, and their intersection point is computed by solving these three plane equations. Such points are used as tie points for transforming different laser coordinate systems into a common one. The transformation is bad in cases of inaccurate, or insufficient, or worse-distributed tie points. This paper suggests to apply suitable “virtual corner points” to solve this problem.
The test results show that suitable virtual corner points really can strengthen the geometrical configuration for the transformation and thus raise the accuracy of corresponding transformation parameters with the improvement rate of 36% to 71%. On the other hand, the ratio of the RMSD-value to the scanning distance S becomes a constant of 0.00015 in case of , where RMSD denotes the root mean square value of the perpendicular distance from a laser point to its corresponding plane.
Key Words: LIDAR, least squares fitting, corner feature point, tie point, coordinate system
1 Associate Professor Dr.-Ing., Department of Geomatics, National Cheng Kung University
2 M.Sc., Department of Geomatics, National Cheng Kung University
Received Date: Oct. 01, 2005 Revised Date: Sep. 11, 2006 Accepted Date: Sep. 14, 2006