行政院國家科學委員會專題研究計畫 成果報告
開關式磁阻馬達之設計、驅動、控制改善及前瞻技術開發- -總計畫(2/2)
研究成果報告(完整版)
計 畫 類 別 : 整合型
計 畫 編 號 : NSC 95-2221-E-011-190-
執 行 期 間 : 95 年 08 月 01 日至 96 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學電機工程系
計 畫 主 持 人 : 劉添華
計畫參與人員: 學士級-專任助理:鄭珊珊
處 理 方 式 : 本計畫可公開查詢
中 華 民 國 96 年 06 月 28 日
行政院國家科學委員會補助專題研究計畫成果報告
開關式磁阻馬達之設計、驅動、控制改善及 前瞻技術開發-總計畫(2/2)
計畫類別:□ 個別型計畫 ■ 整合型計畫 計畫編號:NSC 95-2221-E-011-190-
執行期間:95 年 08 月 01 日至 96 年 07 月 31 日
計畫主持人:劉添華 共同主持人:
計畫參與人員:鄭珊珊
成果報告類型(依經費核定清單規定繳交):□精簡報告 ■完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、
列管計畫及下列情形者外,得立即公開查詢
■涉及專利或其他智慧財產權,□一年■二年後可公開查詢
執行單位:國立台灣科技大學電機工程系
行政院國家科學委員會專題研究計畫成果報告
開關式磁阻馬達之設計、驅動、控制改善及前瞻技術開發-總計畫(2/2)
Research on Machine Design, Drive, Control Improvement and Advanced Technology Development for Switched Reluctance Motors-The Main Project
計畫編號:NSC 95-2221-E-011-190-
執行期限:95 年 08 月 01 日至 96 年 07 月 31 日 主持人:劉添華
執行機構及單位名稱:國立臺灣科技大學電機系 計畫參與人員:鄭珊珊
一、中文摘要
本計畫針對開關式磁阻馬達之設計、驅動、控制的相關技術,提出改善對策及前 瞻性技術開發。本計畫由六個子計畫所組成,以系統化的方法,進行開關式磁阻馬達 相關技術開發,包括:磁阻馬達先進轉換器及驅動控制技術開發(子計畫一),磁阻馬 達洗衣機應用及其無轉軸驅動技術(子計畫二),毫米級微型磁阻馬達設計與製造(子 計畫三),磁阻馬達智慧型控制與電動機車應用(子計畫四),磁阻馬達無軸承控制(子 計畫五),SOPC 磁阻馬達控制器研究(子計畫六)。
經由本計畫之執行,進行開關式磁阻馬達相關前瞻性技術的開發及應用。計畫中,
除注重先導性技術的研發外,並探討與國內工業界充份交流及合作,以期將磁阻馬達 引入國內。本計畫的執行,可培育電機控制與電力電子方面的人材,並擴展國內電機 控制領域,提升國內電機控制研究水平。
關鍵詞:開關式磁阻馬達、馬達設計、新型轉換器、無轉軸偵測元件驅動、無軸承控 制、洗衣機應用、智慧型控制、電動機車應用。
ABSTRACT
This project focuses on research of the performance improvement and advanced technology development for a switched reluctance motor (SRM) with its drive system, which include: motor design, drive, control, and applications. In order to systematically study these topics, this project consists of six sub-projects, including: the design and implementation of the advanced power converters and drives of the SRM(sub-project 1), the application of SRM in washing machine and its related sensorless technique(sub-project 2), the design and implementation of the micro-SRMs(sub-project 3), the intelligent control with its application in motorcycle for SRM drives(sub-project 4), the new control method
By executing this project, some advanced technology has been developed and the related applications have been studied. This project focuses on both advanced technology development and its real industrial applications. In addition, the project has cooperated with local industry. As a result, this project can set up the SRM design and drive technology in our nation. In addition, this project can train graduate students who major in motor drives and power electronics. It extends the research areas of motor drive, and raises the research capability in our nation.
Keywords: switched reluctance motor, motor design, novel power converter, sensorless drive system, bearing-less control, washing machine application, intelligent control, motorcycle application.
二、計畫緣由與目的
開關式磁阻馬達具有結構簡單,可靠度高,無滑差,無轉子銅損,此外,其驅動 器為單極性電流調制,結構點簡單,無上下臂短路問題,在國外已引起工業界及學術 界廣泛的研究興趣,如 Tridelta Industries Inc.應用在多功能的地板整理機及電動車驅 動。Emerson Motor Co.應用在大容量滾筒式洗衣機以及抽真空泵。不但耐用,且能運 轉在高於31000rpm,壽命超過 10000 小時,並能全速範圍調速。福特公司應用在汽車 的動力方向盤。AMC 與日本電氣精器公司及美國西屋電氣製造以開關式磁阻馬達應 用在牽引車,另一方面,英國飛機製造業者亦開始採用此種磁阻馬達作飛機擋板的致 動器。為了使開關式磁阻馬達能在國內生根,並有效整合國內有限的人力及資源,本 計畫結合了六個子計畫,其結構如下:
圖1 子計畫架構圖
三、研究方法,進行步驟及研究結果
本計畫共包括六個子計畫相關的研究方法、進行步驟及獲得的結果分別說明如下:
子計畫一:開關式磁阻馬達之先進轉換器及驅動控制技術開發 清華大學電機系 廖聰明
1-1 前言
開關式磁阻馬達(Switch-reluctance motor, SRM)在結構及轉換器電路上雖固有一 些優點,但仍具許多缺點、需研發一些關鍵技術以增進其驅動性能及應用能力。本計 畫之主要目的在於從事開關磁阻馬達之先進轉換器及其驅動控制技術開發,第一及第 二年之計畫完成開發了電源介面電路及控制機構、直流鏈增壓控制策略、強健電流及 電壓控制技術、直流鏈電壓追控與調控技術、軟式轉換器、隨機脈寬調制技術、轉換 器模組化先期研究等。本年度之主要研究工作內容含:(i) SRM 前端 SMR 之建構與控 制;(ii) 直流鏈漣波之產生、模式化及其效應分析、轉換器之模組化研究;(iii) 換向 時刻移動之弱磁等值性及調整;(iv) 增壓配合換向調控之操控性能影響;(v) 電流波 形與換相調控對轉矩、機械振動等之影響;(vi) 馬達之動態模式研擬、估測與強健控 制。
vac iac
iL
L D
+
− iD
ac div v=
+
+
− EC
RL PMSG SRM
HAHB W1
D1 D3 D2
DA
SA
S4 S2 S3
S1 DB
SB D4
d dp i ,
1
Co vd
i1 S
SMR front-end SRM drive
i2 i3 i4
ωr
Hall signals
∗ Σ ωr
+
SASB
Iˆc
S2 S3S4 S1
S2S3S4 S1
D A /
interface Encoder PIO
SB
dt d /
θr
×
schemePWM vcont
vtri Current control scheme
*L i
' iL
Ki iL ac di v v=
Kf A/D Kv
vo ' vd
*d vVoltage
control scheme
= u
ac acv v /ˆ ˆ*L I
i1 i2 i3 i4 EC HA HB 2
Co
W2 W3 W4
S
cω G
Gate driver
) (s Hm
*1 ωr εω
Σ
* i4 1* i
* i2
* i3 Current command generator S2S3S4 S1
Gci
∗m i1 Σεi
Σ vc1
vtri PWM schemes ) (s Wi )
(s Wω +
*rm ω
Speed feedback controller
Current feedback controller
Commutation logic generator HBA
H '
ωr +−
++
1' i '2 i
'3 i '4 i +
− Command
generator εi
DSP DSP
* ωr
SA Gate
driver
2 vcvc3vc4
Sameas above 2 vc
3 vc
4 vc
(a)
*rc
ωSRDFC
SBC
CRDFC CBC
Gcbi
−1
= pi cfi H G
=
×i*L i′L ˆ* IL
) sin 2ˆ 1 ˆ(
* t
V V V
d
tri− ac ω
Gcfp
vcfp
Vˆac
*
Vd
) (s Wi
i d
v tri
K V
s K V L
* 2 ˆ
iL Ki iL'
−1 Hpi
d* V
'
vd
vd
εi vcbi
vcfi vcdi
) ˆ s( di
Pd
v′d
I ′d
IˆL
Kv
ˆ*
ILb
v′d
∗ Vd
εv
vd
δ vd
ˆ*
IL
δ
Hpv δ
Hpv ˆ*L
I
∗ 1
Vd ) (s
Wv δ
'
iL
)
i(s
∗ ε
iL Gcbi(s)vcbi
s L K V
V
v tri
d
2ˆ
* iL
Ki '
iL
≈1 vd
δ ′
圖1-1 控制方塊圖;(a) SMR 供電 SRM 驅動系統及其控制架構;(b) SMR 電流控制 器;(c) SMR 電壓控制器;(d) SMR 電流控制等效方塊圖
1-2 研究內容
1-2-1 馬達驅動系統組成及模式
所建切換式整流器(Switch-mode rectifier, SMR)供電之 SRM 驅動系統及其控制架 構如圖1-1 (a)所示,而圖 1-1 (b)及圖 1-1 (c)為所提 SMR 之電壓及電流控制器,圖 1-1 (d)為 SMR 電流之控制簡化等效方塊。忽略相間互耦效應及假設線性磁路,SRM 之相 線圈電壓方程式可寫成:
) , , ( ) , ( )
, ) (
, ) (
,
( r r e r r r
r r
r e i
dt i di L Ri i dt R i di L Ri i i
L dt i di L Ri
v ω θ θ θ ω
θ
θ θ ∆ + + ω ∆ + +
∂ +∂ +
= (1-1)
其中,Rew(ωr)=等效能量轉換電阻,其他變數之定義可參照既有文獻。所用 SRM 之 實測參數為(在i 5= A下量):
Ω ) 2827 . 0 ( 125
) 5 . 22 ( ) ( 14
) 0 ( Ω, 96 .
0 L mH L r L mH Rew ωr
R= D = ≤ θ ≤ D = = (1-2) 產生轉矩及轉矩方程式可表為:
2 4 2
1
) , ) (
, ( 2
, 1 L i K ii
i dt T
Jd B T T
T t r
r r ei
r r
L i
ei
e θ
θ θ
ω ω ∆
∂
= ∂ +
+
=
=∑
=
(1-3)
觀察:(i) Back-EMF e(i,θr,ωr)為i , ωr及θr之非線性函數,速度及負載越高,線圈電 流之時變率將降低,將損及轉矩之動態及穩態能力;(ii) 有些時段線圈端電壓及電流 與直流鏈失去關聯,造成直流鏈電壓及電流漣波之產生,主要含二倍頻率、換向頻率 及切換頻率漣波。於中等速度下之草繪直流鏈電壓及電流漣波如圖 1-2(a),其可概表 為:
2 4
1 d ds dh d
j dj
d i I i i i
i =∑ ∆ + + +
=
(1-4)
ds d d d ds
d d
d V v v V v v v v
v ∆ + 2+ ∆ d +δ , δ ∆ 2 + (1-5)
θr
θr
id
vd
(a)
iL
L D
+
− +
d d p i ,
1
Co
d∆ S v
SMR front-end
2
Co
− vac
iD
1
Rs Rs2 d
I δid
(b)
Rde
SRM load model
d
d v
V +δ (Pd)
圖 1-2 (a) 於中等速度下之草繪直流鏈電壓及電流漣波;(b) SMR 之 SRM 等效負載 電路模型
其中:I ,d Vd =直流成份,i ,ds vds =換向頻率成份,id2,vd2 =二倍頻率成份,idh =切換 頻率成份,v 忽略之。因此將 SMR 之 SRM 等效負載模型表為如圖 1-2 (b),其中: dh
d d d d d
de i i I
V
R ∆P , δ = − (1-6)
於Vd =400V, Pd =2kW 及4kW 相當於Rde = 80Ω及40Ω。
控制策略:SMR 之電路及控制器先於所定正規R 下設計,由於 SRM 馬達主動性負載de 所導致之δid與R 之變動效應,將由強健控制克服改善之。 de
1-2-2 SMR 建立之直流鏈
A. 電力電路
(a) 規格:單相升壓型 SMR:輸入:Vac =220±10%Vrms/60Hz; )
342 2 1 . 1 220 (
400V V
Vd = ≥ × × = ;輸出:Pd =2kW;Efficiency:η≥0.85;Power factor:
kHz fs =30 .
(b) 儲能電感:量測之所設計電感:L=L=1.184mH (at 30kHz, HP4194A Impedance/
Gain-Phase Analyzer)。
(c) 直流鏈濾波電容
(i) 大濾波電容:Co1 =1000µF/500V, electrolytic, 量測之 ESRs:
) 120 ( 64 .
1 59 m Hz
Rs = Ω , 49.95mΩ(1kHz), )44.29mΩ(10kHz .
(ii) 小高頻濾波電 Co2, film-foil polypropylene, 量測之 ESRs:Rs2 =600.36mΩ(120Hz), )
1 ( 43 .
3 mΩ kHz , 31.79mΩ(10kHz).
(d) 功率半導體:開關:IGBT IXGH60N60(600V ,ID =60A(continuous), IDM =200A (pulsed));二極體:fast diode RURP3060(600V , average currentIF =30A, repetitive currentIFRM =70A)。
B. 控制架構 (a) 電流迴路
如圖1-1 (b)之 SMR 電流控制機構含:current feedback controller(CBC), current PWM feedforward controller(CPFC), current robust disturbance feedforward controller (CRDFC), current command feedforward controller(CCFC)。前向控制係用以降低下列 參數及變數變化之影響:儲能電感、直流鏈電壓及其漣波尤其是換向頻率及二倍頻 成份、交流輸入電壓等。
(b) 電壓迴路
如圖1-1 (c) 之電壓控制機構含:voltage feedback controller(VBC), voltage robust disturbance feedforward controller(VRDFC).
1-2-3 開關式磁阻馬達驅動系統
A. 電力電路
(a) 直流鏈:由單相升壓型 SMR 建立可升及穩壓調整之直流電壓。
(b) 轉換器:Miller’s converter。
(c) 馬達:4-phase 8/6 pole, 400V, 1500rpm, 4kW(TASC Drives Ltd.)。
(d) DSP 數位控制環境:ADMC401(Analog Devices)。
(e) PWM 機構: RC-CCPWM, fs =10kHz。
B. 控制架構 (a) 電流迴路
如圖1-1 (a)之 SMR 電流控制機構含:current feedback controller(CBC), current robust disturbance feedforward controller(CRDFC)。
(b) 速度迴路
如圖 1-1 (a)之速度控制機構含:speed feedback controller (SBC), speed robust disturbance feedforward controller(SRDFC).
(c) 直流鏈電壓之增壓
直流鏈由單相升壓型SMR 建立可升及穩壓調整之直流電壓,以降低 Back-EMF 於 高速下之效應。
C. 換向時刻移動之弱磁等值性及調整
(a) Back-EMF 對線圈電流之時變率之影響由(1-1),線圈電流之時變率可表為:
) , (
) (
) , (
) ) , ( (
r e d
r r r d r
i L
i R R v i
L i i R L v dt di
θ θ
θ ω θ
+ ω
= −
∂ +∂
−
= (1-7)
故速度及負載越高,線圈電流之時變率將降低,損及轉矩之動態及穩態能力。藉由 換向時刻前移可降低L(i,θ 及r) e(i,θr,ωr)=( ∂L(i,θr)/∂θr)ωri∆Reωi之效應。
(b) 換向時刻移動之弱磁等值性
為簡化推導,假設:(i) turn-on and turn-off instants are shifted simultaneously with fixed dwell angleθd =π/12;(ii) α =advanced shift angle, β=the residue of dwell angle.於是可表示前移角度佔導通角度之責任週比:
1 0
,
, = + ≤ ≤
∆ D
D d
d
β α θ θ
α (1-8)
根據所設如圖1-3 之電流波形可推得相線圈之電壓及轉矩產生公式:
) , , ( ) 1 ) (
, ) (
1
( r r r
r
r i i Ri D e i
D L i
R
v ω θ ω
θ
θ = + −
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛
∂
− ∂ +
= (1-9)
r e a r
r
e L i i D P T
T ω
θ
θ − =
∂
= ∂ ( , ) (1 ), 2
1 2
(1-10)
由(1-9)及(1-10)式可得:
2 2
) 1 ) ( , (
) 1 ( )
, ( 2 1
⎥⎦
⎢ ⎤
⎣
⎡ −
∂ +∂
−
∂
= ∂
i D R L
D v i
T L
r r r r
e r
θ ω θ θ
θ (1-11)
觀察:(i) (1-9)式顯示換向時刻前移可使 back-EMF 降低(1−D)倍,即具弱磁之效應;
(ii) 圖 1-3 顯示換向時刻前移亦可降低激磁線圈之電感效應;(iii) 由(i)、(ii)及(1-7)可
自動換向時刻前移調控技術;(v) 換向時刻前移亦可減小線圈於消磁時定子與轉子齒 部之重疊角度,降低定子之機械振動。
α β θd Lmax
Lmin ) 1 r( L θ
advanced
i ioriginal
θr
圖1-3 草繪之理想電感及移位前後之線圈電流波形
1-2-4 實測結果與性能評估
z 數位控制取樣頻率:SMR 之電流及電壓迴路:30kHz 及 3kHz:SRM 之電流及速 度迴路:10kHz and 2kHz。
z 模式轉換法:bilinear transformation method。
z 數位控制設計法:Redesign。
A. 直流鏈電壓漣波
SRM 由 前 端 SMR 供 電 , 工 作 於 (Vd =400V , ωr =1500rpm , RL = 22Ω , W
Pd ≈1973 ),採Co =Co1及Co =Co1+Co2下量測之直流鏈電壓波形如圖1-4 (a)及 1-4 (b) 所示。結果顯示加入高頻低ESR 之C 大輻降低了直流鏈之換向頻率電壓尖波。 o2
圖1-4 量測之直流鏈電壓波形:(a) Co =Co1;(b) Co =Co1 +Co2
B. SMR 控制性能
在(Vac =220V , Vd =400V , ωr =1500rpm, RL = 22Ω, Pd ≈1973W )下,量測之 ˆ )
,
(iL∗ I*L 波形,(vac,iL∗,iL)波形,(∆vd,iL)相量如圖1-5 (a)及 1-5 (b)所示。結果顯示加入
VRDFC 強健控制可得較乾淨之電流命令及較佳之 SMR 控制性能。
C. SRM 之全系統驅動控制性能 (a) 直流鏈電壓波形及定子機械振動
令 SRM 驅動系統受所提控制架構控制,且工作在(Vd =400V , ωr =1500rpm, Ω
L = 22
R , Pd ≈1973W )下,應用不同之 AC/DC 前端轉換器建立直流鏈電壓,量測 之直流鏈電壓波形Vd(t)及定子機械振動(加速度)a(t)比較於圖1-6 (a)及 1-6 (b)。結 果顯示加入所提控制可得較平順之直流鏈電壓及較小之定子機械振動。
(b) 直流鏈電壓之調控特性
令Vd =400V ,應用 PI 及所提之控制,在馬達負載變動為(1200rpm 至 1500rpm, Ω
L = 22
R )下,量測之馬達轉速ω 及直流鏈電壓r v 如圖 1-7 所示。結果顯示加入所d 提控制可得較佳之直流鏈電壓調控特性。
(c) SRM 之線圈電流及速度動態響應、機械振動
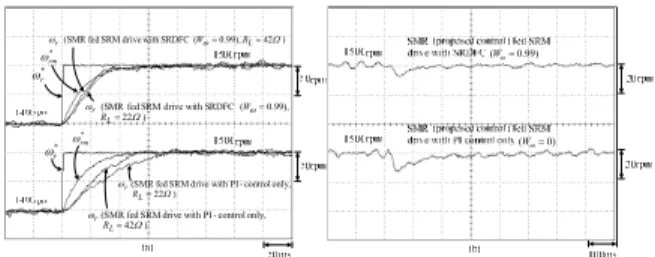
在(1400rpm, RL = 22Ω)下,應用不同之 AC/DC 前端轉換器建立直流鏈電壓,速 度命令變化為(1400rpm 至 1500rpm)下,量測之速度動態響應如圖 1-8 (a),對應之 線圈電流及其命令如圖 1-8 (b)。結果顯示:(i) 由所提 SMR 前級建立較高及較穩 之直流鏈電壓可得較快速之線圈電流及速度動態響應;(ii) 換向時刻前移可降低 back-EMF,具弱磁效應,可得較快速之線圈電流及速度動態響應;(iii) 由上兩者 亦可得改善之轉矩動態及穩態能力、降低定子之機械振動。
在Vd =400V , RL = 42Ω及RL = 22Ω下,SMR-fed SRM 之速度變化為 1400rpm 至 1500rpm, 應 用 PI 及所提之速度強健控制,量測之轉速比較於圖 1-9 (a) 。在 (ωr =1500rpm, RL = 42Ω)下,負載變化為RL = 42Ω to 22 下,量測之轉速比較於Ω 圖1-9 (b)。結果顯示加入所提控制可得較佳之速度動態控制特性。
*
iL
vd
∆ iL
iL
*
iL
vac
*
iL
vd
∆ iL
iL
*
iL
vac
ˆL*
I
ˆ*
IL
Ω
L = 22
R , Pd ≈1973W ):(a) Vac =220V , PI feedback current control;(b) V
Vac =220 , the proposed control
) (t
vd a(t)
4D 4D
圖1-6 應用不同之 AC/DC 前端轉換器建立直流鏈電壓,量測之直流鏈電壓波形vd(t) 及 定 子 機 械 振 動( 加 速 度 ) a(t) (Vd =400V , ωr =1500rpm , RL = 22Ω ,
W
Pd ≈1973 ):(a) )vd(t ;(b) )a(t
V 400
V 400
) 0.99) with
control (Proposed
(SMR v=
d W
v
) only) control - (PI (SMR d v
*
ωr
) 0.99) with control (Proposed
(SMR v=
r W
ω
) only) control - (PI (SMR
r ω
圖1-7 令Vd =400V ,應用PI 及所提控制,在馬達負載變動為(1200rpm 至 1500rpm, Ω
L = 22
R )下,量測之馬達轉速ω 及直流鏈電壓r v d
*
ωr
) control) ed SMR(Propos , 450 ( :V V E d=
) control) (Proposed SMR , 400 (
:V V
D d=
) only) control - (PI SMR , 400 ( :V V C d=
) Rectifier , 310 ( :V V A d=
) Rectifier , 400 ( :V V B d=
) 4 shift advanced with control) ed SMR(Propos , 450 (
:V V D
F d= A
BC D E F
A
DC B , ,
E
F 1* i
*1 i 1* i
*1 i
BC D
i1
i1 i1
) (i1
) (i1
) (i1
圖1-8 在(1400rpm, RL = 22Ω)下,應用不同之 AC/DC 前端轉換器建立直流鏈電壓,
速度命令變化為(1400rpm to 1500rpm)下,量測之:(a) 速度動態響應;(b) 對 應之線圈電流及其命令
) 99 . 0 (Wω=
) 0 (Wω=
* ωr
) 42 0.99), ( SRDFC with drive SRM fed (SMR
Ω
ωr Wω= RL=
*
ωrm
) 22
(SMRfedSRMdrive with PI-controlonly, ω Ω
L= rR
* ωr
* ωrm
) 2 2
(SMRfedSRMdrive with SRDFC ( 0.99),
ω Ω ω
= =
L
rR W
) 2 4
(SMRfedSRMdrive with PI-controlonly, ω Ω
L= rR
圖 1-9 在Vd =400V ,應用 PI 及所提之速度強健控制之 SMR-fed SRM 轉速響應比 較:(a) RL = 42Ω及RL = 22Ω下,速度變化為 1400rpm 至 1500rpm;(b) 在 (ωr =1500rpm, RL = 42Ω)下,負載變化為RL = 42Ω to 22 Ω
1-2-5 功率模組化及集積化
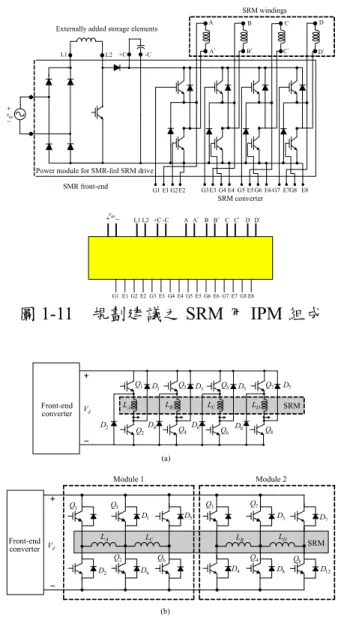
雖然用於三相標準AC 馬達驅動系統之智慧型功率模組(Intelligent power modules, IPM)已成熟化且已有商用化產品可購得,但尚少有用於 SRM 之 IPM。此方面之進展 及所提替代方案簡述如下:
A. Fairchild 產品 SRM IPM FCAS50SN60:如圖 1-10,僅可供單一相線圈之供電,對 於一個四相SPM 需四個 IPM 模組。
B. 較得宜之 SRM IPM 組成:如圖 1-11 之規劃建議,目前尚無市售產品,有待開發。
C. 所提替代方案:如圖 1-12 之規劃建議,應用兩個三相標準 AC 馬達驅動系統之智 慧型功率模組(如典型之 PS21265-P/AP, Mitsubishi Company)構建。
圖1-10 Fairchild 出產之 SRM IPM FCAS50SN60
vac
+
−
SMR front-end
SRM converter Power module for SMR-fed SRM drive
SRM windings
G1 E1 G2 E2 G3E3 G4 E4 G5 E5G6 E6 G7 E7G8 E8 A
A'
B C D
B' C' D'
-C
L1 L2 +C
AA'BB'CC'DD'
-C L1 L2 +C + −vac
G1 E1 G2 E2 G3 E3 G4 E4 G5 E5 G6 E6 G7 E7 G8 E8 Externally added storage elements
圖1-11 規劃建議之 SRM 用 IPM 組成
Module 1 Module 2
Q1 Q3
D1 Q5
Q2 Q6 Q4
D2 D4
D3 D5
D6
LA LC
Q7
D7
Q8 D8 D12
LB LD
Front-end
converter Vd SRM
SRM
Q2 Q4 Q6
D2 D4 D6
Q8 D8
Q1 Q3
LA LB LC LD
D1 D3 Q5 D5 Q7 D7
Front-end converter Vd
(a)
(b)
圖1-12 建議應用兩個三相標準 AC 馬達驅動系統智慧型功率模組構建之 SRM 用 IPM
1-3 自我評估
本研究主要已完成下列研究工作:SRM 前端 SMR 之建構與控制;應用於 SRM 轉換器電力電路之模組化進展研究;換向時刻移動之弱磁等值性;換向時刻移動對馬 達驅控性能及機械振動減小之影響;增壓配合換向調控之操控性能影響;直流鏈漣波 之產生、模式化及其效應分析;馬達之動態模式研擬、估測與強健控制。
1-3-1 本計畫所訂目標已大致完成。
1-3-2 研究業績(期刊發表):
J. Y. Chai and C. M. Liaw, “Robust control of switch-mode rectifier considering nonlinear behavior,” IET, Electric Power Applications, to appear, 2007.
子計畫二:開關式磁阻馬達在洗衣機的應用及其無轉軸驅動器之研發 臺灣科技大學電機系 劉添華
2-1 前言
本計畫旨在探討具功因校正無轉軸角度偵測元件之開關式磁阻電動機驅動系統的 研製。計畫中研製功因校正電路並利用偵測定子電流之斜率估算自感,進而達成估測 轉軸角度之閉迴路控速。
本計畫主要包括三個工作項目。首先,設計及製作具功因校正電路,其次,以 TMS320LF2407A 之 DSP 處理器完成無轉軸偵側元件洗衣機閉迴路控制軟體撰寫。最 後,量測輸入端功率因數及洗衣機實際運轉速度,以期與理論分析作一比較。本計畫 中將探討具功因校正開關式磁阻電動機無轉軸閉迴路驅動系統應用在洗衣機。其相關 的原理分析及實測結果均將在報告中加以說明。
2-2 動機與目的
傳統洗衣機皆使用單相感應電動機來達到變速驅動。然而單相感應電動機效率 差,需使用啟動電容及離心開關,在能源日益昂貴的今日,已不是最佳選擇。
ㄧ般而言,洗衣機需要扭力大、可靠度高、效率高的需求,考慮上述需求時,開 關式磁阻電動機為甚佳的選擇。開關式磁阻電動機及其驅動器具有結構簡單、可靠度 高等特性。因此,本計畫針對開關式磁阻電動機在洗衣機上的應用進行較深入的研究。
本 計 畫 提 出 升 壓 型 架 構 來 作 為 整 流 器 電 路 , 並 利 用 功 因 校 正 積 體 電 路 (UC3854N)[1]高頻切換技術控制開關的導通及截止,使得輸入電流波形能追隨輸入電 壓波形,達到輸入電壓與電流同相位並抑制諧波的目的。
在無轉軸角度偵測研究方面,本計畫提出一種簡單的轉軸角度估測方法,預先量 測定子自感、激磁電流與角度位置關係的自感曲線,藉由回授激磁相電流,得到電流 斜率,進而估測定子自感值,進一步根據自感曲線的參數,估測出轉軸的位置。為了 實際驗證所提方法的可行性,本計畫中將所提方法實際在洗衣機進行測試,與過去傳 統的單相感應電動機驅動式洗衣機比較,本計畫所提的洗衣機系統具有扭力大、可靠 度高等優點。
2-3 功因校正器介紹
本節針對功因校正電路的基本原理與控制方法加以探討,分述如下:
2-3-1 功因校正電路控制方法