行政院原子能委員會 委託研究計畫期末研究報告
輻射事件應變技術開發與研究(1/4)
Research on the emergency-response technology for the radioactive events(1/4)
計畫編號:109- - - -
(GRB 系統科技計畫編號:PG10903-0036 ) 受委託機關(構):原子能委員會核能研究所
計畫主持人:姚忠
聯絡電話:(03)4711400 ext 7610
主要工作項目負責人:楊穆、盧信、黃翰、許霞、林得 聯絡人:彭琪
報告日期:109 年 12 月 25 日
目 錄
中文摘要 ... i
英文摘要 ... ii
壹、前言(計畫緣起) ... 1
貳、研究目的 ... 2
一、強化輻射應變技術 ... 3
二、完備應變設備整備相關作業及其作業程序 SOP ... 3
三、輻射事件應變技術開發與研究 ... 3
四、建置遠端遙控行動式輻射偵測平台 ... 3
五、建置輻射災害應變資訊平台 ... 4
參、研究方法、過程、結果與產出 ... 5
一、強化輻射應變技術 ... 9
二、完備應變設備整備相關作業及其作業程序 SOP ... 17
三、輻射事件應變技術開發與研究 ... 19
四、建置遠端遙控行動式輻射偵測平台 ... 46
五、建置輻射災害應變資訊平台 ... 60
肆、結論與建議 ... 93
一、強化輻射應變技術 ... 93
二、完備應變設備整備相關作業及其作業程序 SOP ... 93
三、輻射事件應變技術開發與研究 ... 95
四、建置遠端遙控行動式輻射偵測平台 ... 96
五、建置輻射災害應變資訊平台 ... 97
伍、參考文獻 ... 99
中文摘要
為提供輻射災害緊急應變防災、救災人員之教育訓練與應變所 需資源,本計畫擬建置輻災防救訓練研發中心基地,協助解決現今 輻射災害防救訓練場所、裝備與教材不足之問題,研擬國內輻射彈 爆炸事件應變策略,透過開發應變所需之遠端遙控輻射偵檢技術,
以及核子事故以外類型之輻射災害管理技術與平台,擴大輻射災害 的應變效益及效能。針對前述目的,本計畫執行工作包括:
1. 強化輻射應變技術
2. 完備應變設備整備相關作業及其作業程序 SOP
3. 輻射事件應變技術開發與研究(放射性物質擴散分析能力建 立)
4. 開發遠端遙控行動式輻射偵測平台、應變資訊平台
關鍵字:輻射災害、緊急應變
英文摘要
In order to provide the education, training and resources of radiation disaster response and disaster relief personnel, this project plans to build a radiation disaster prevention and rescue training research and development center to help solve the current shortage problems of radiation disaster prevention and rescue training sites, equipment and teaching materials. This project also plans to expand the effectiveness of response to radiation disasters by developing domestic dirty bomb incident response strategies, remote control radiation detection technologies, and the radiation disaster management technology and platform other than nuclear accidents. For the aforementioned purposes, the implementation of this project includes:
1. Enhance the radiation disaster response technology
2. Complete operating procedures for the emergency equipments and preparation.
3. Research and development of radiation incident response technology (establishment of radioactive material diffusion analysis capability)
4. Develop remote control mobile radiation detection platform and response information platform
Keywords: radiation disaster, emergency response
壹、前言(計畫緣起)
輻射應用隨科學技術發展遍布農、工、商、醫用等各行業,先 進國家日益重視其潛在伴隨之輻射災害事件預防與救災,並因應國 際化之社會發展,為消弭使用輻射源惡意攻擊對民眾的威脅,逐步 進行輻射彈爆炸事件應變策略的研擬。
輻射災害事件或輻射彈爆炸事件初始數小時的應變作為至為關 鍵,影響各階段整體救災執行策略與成效。因此第一線應變人員需 負有多工的任務,例如確認輻射外釋狀況、污染分布情形、導入搶 救生命行動、民眾防護行動措施建議,回報現場狀況等等。這些任 務在第一線應變人員抵達現場內數分鐘即開始執行,初始應變活動 效能與協調狀況,將決定後續其他支援之組織團隊與資源抵達現場,
接續救災行動的執行成效。因此,進行輻射事件應變技術開發與研 究,對我國提升災害防救能量至為重要。
貳、研究目的
為提供輻射災害緊急應變防災、救災人員之教育訓練與應變所 需資源,本計畫擬建置輻災防救訓練研發中心基地,協助解決現今 輻射災害防救訓練場所、裝備與教材不足之問題,並研擬國內輻射 彈爆炸事件應變策略,透過開發應變所需之遠端遙控輻射偵檢技術,
以及核子事故以外類型之輻射災害管理技術與平台,擴大輻射災害 的應變效益及效能。
針對前述研究目的,本計畫今年執行工作如圖 1。
圖 1 109 年度計畫主要工作項目
其中具體內涵包括下列5個主題(子項工作項目),係以核研所之 技術為中心,依據原能會109年度政府科技發展中程個案計畫書之指
建置輻射災害防救訓練研發中心
109年「輻射事件應變技術開發與研究」(1/4)
強 化 輻 射 應 變 技 術
完 備 應 變 設 備 整 備 相 關 作 業 及 其 作 業 程 序
S O P
輻 射 事 件 應 變 技 術 開 發 與 研 究
建 置 遠 端 遙 控 行 動 式 輻 射 偵 測 平 台
建
置 應
變 資
訊 平
台
示而訂定,報陳原能會審查同意後執行。
一、強化輻射應變技術
透過研究建立輻射災害防救訓練初級教材、輻射偵檢儀器 之操作手冊及影片,並辦理輻射應變技術隊(以下簡稱輻應隊) 年度訓練,改善現今輻射災害防救訓練場所與教材不足之問題,
以強化我國輻射應變技術,未來並可將訓練研發中心的研發成 果納入訓練項目中,提升應變人員技能。
二、完備應變設備整備相關作業及其作業程序SOP
完成個人輻射偵檢儀器操作與維護手冊及影片各1 份。進行 輻 射 彈 爆 炸 事 件 初 期 應 變 規 劃 研 究( 主 要 參 考 Radiological Dispersal Device Response Guidance,美國國土安全部,2017),
進行輻應隊輻射彈爆炸事件初期應變應變人力、設備需求之評 估,補充相關作業程序之不足。
三、輻射事件應變技術開發與研究
選定擴散模擬模式,建立未來模擬演算戶外輻射彈爆炸事 件影響之區域輻射強度或污染範圍之基礎,降低應變人員曝露 於輻射下的健康風險與壓力,以利必要之防護行動決策。
四、建置遠端遙控行動式輻射偵測平台
初步建置遠端(20 公尺範圍)遙控行動式輻射偵測平台,偵測 現場輻射劑量率、二氧化碳濃度、高溫等有害狀況,並回傳現 場實景,減少應變人員處於潛在高輻射或高危險區域之工作時 間。
五、建置輻射災害應變資訊平台
配合前述輻射彈爆炸事件初期應變規劃研究,開發核子事 故以外類型之應變所需之輔助平台雛形,做為未來提升應變組 織與成員間溝通、資訊分享效益,協助應變任務規劃的基礎,
厚植輻射災害應變能量。
參、研究方法、過程、結果與產出
有關輻災防救訓練研發中心基地選址一案,經原能會核能技術 處與核能研究所所部、核能研究所各功能組間,多次協調、討論、分 析、與實地勘察後,選定於桃園市龍潭區文化路1000號核能研究所,
所內012A館1樓室內及所鄰近之戶外場地。
其中室內空間長7.34公尺、寬6.60公尺,預計作為多功能會議、
展示、解說、訓練及儀器裝備器材儲放空間,預計於110年間進行該 內部空間原有物資、人員遷移,並進行外牆、大門鐵捲門如圖 2更換。
於111年進行室內工程,今年完成室內規劃設計如圖 3。
圖 2 輻災防救訓練研發中心基地原有外牆及大門
預計可進行輻射災害緊急應變相關之:
1. 輻射偵檢儀器、人員防護裝備、器材等儲放、展示、解說;
2. 無人飛行載具及地面遙控載具展示、解說;
3. 會議與輻射災害應變資訊平台應用;
4. 訓練課程教室如圖 3。
圖 3 輻災防救訓練研發中心基地之室內平面設計圖
戶外場地長約80公尺、寬約50公尺,預計作為演習訓練場地如圖 4。
圖 4 輻災防救訓練研發中心基地戶外場地示意圖
今年完成整地、填土、拆除圍欄等工作如圖 5、圖 6,擬規劃放 置活動布景以及貨櫃,模擬購物中心或車廂,輻射彈爆炸事故發生後 之處置應變場所,及輻射應變技術隊戶外搜索、偵測之演練場地,並 保留部分坡地作為指揮中心制高觀察地。預計於110年進行細部規劃,
因預算分配緣故,於112年進行採購。
圖 5 輻災防救訓練研發中心基地(整地前)
圖 6 輻災防救訓練研發中心基地(整地後)
本年度研究計畫工作項目依原能會核定版本計畫書執行,各項 目研究方法、過程與產出詳述如下:
一、強化輻射應變技術
(一)研究方法
為改善現今輻射災害防救訓練及教材不足之問題,於本年 度辦理一場次輻射應變技術隊年度訓練課程,經由課堂授課、
情境模擬與實地操作演練,強化輻射災害應變作業人員知識 與技能。
(二)研究過程
本次訓練於今年6 月 4、5 日,假核能研究所 060 館國際 會議廳、大禮堂以及壘球場大草坪進行。邀請所內外專家擔任 本次訓練課程講師,課程內容包括人員防護裝備介紹與實作、
SPARCS 空中偵測結果電腦分析與演算地表 1 公尺輻射劑量 率訓練、輻射偵測與射源搜索概念說明、現場小組作業前準備 與作業方式、射源搜索實作(室內與室外)以及實作錄影回顧與 討論,課程表如錯誤! 找不到參照來源。及所示,實際課程進 行情形如圖 7 至圖 13。
因受 COVID-19 疫情影響,依嚴重傳染性肺炎中央流行 疫情指揮中心之防疫規定,宣導學員遵守社交距離,室內應 至少保持 1.5 公尺,室外至少保持 1 公尺,若無法有效維持
社交距離,需全程配戴口罩。本次訓練課程之學員、工作人 員及講師需於訓練課程前填寫健康聲明表,若有疑似症狀或 接觸史,不予參加訓練。
(三)研究產出
本分項完成一場次之輻射應變技術隊訓練課程以及輻射 應變技術隊訓練辦理報告一份,以及各課程之教材及上課影 片。訓練對象為原能會各局處及所屬相關單位(核研所、南部 輻射偵測中心),任務編組之輻應隊成員共 38 人。
本次訓練學員完成第一線偵測人員基礎訓練,包含基礎防 護裝備穿脫(防塵衣、N95 口罩、雙層手套及腳套、密封紙膠 帶等),輻射偵測與射源搜索概念說明、現場小組作業前準備 與作業方式、並進行室內大禮堂與戶外大草坪分組分時、實際 射源搜索訓練。
各訓練課程,同步進行攝影與收音,特邀請核能研究所退 休資深保健物理及輻射安全專業人員擔任教練,於實作現場 全程指導,學員射源搜索觀念、動作與團隊合作方法,以及個 人防護注意事項與裝具運用手法,實作結束後,全體學員回顧 各組分時分地之攝影內容,同時由教練帶領學員複習、檢討,
各組間亦藉由相互觀摩學習、確實精進輻射偵測與射源搜索 技能。
表 1 輻應隊訓練第一天課程表
日期:109 年 6 月 4 日 地點: 060 館國際會議廳
時間 課程名稱 課程內容說明 時數
(時) 講師
9:10- 11:10
人員防護 裝備介紹 (呼吸防護 具)
呼吸防護具分類介 紹
呼吸防護具之選用 與密合度測試說明
2 賴全裕 副教授 (中山醫學大學)
11:20- 12:20
人員防護 裝備實作 (防護衣穿 脫)
教導學員正確穿脫 人員防護裝備及實 作練習
1
潘宗梁 黃昭輝 (核研所退休同
仁)
13:00- 15:00
SPARCS 空 中偵測結 果電腦分 析與演算 地表1 公 尺輻射劑 量率訓練 課程
SPARCS 空中偵測系 統介紹
空中偵測結果回推 地表一公尺輻射劑 量率演算教學
2 劉祺章 (輻射監測中心)
15:00- 16:00
輻射偵測 與射源搜 索概念說 明
射源搜索應用設備 介紹
一般搜索程序介紹 與搜索行動規畫考 量說明
1
黃昭輝 (核研所退休同
仁)
表 2 輻應隊訓練第二天課程表
日期:109 年 6 月 5 日 地點:國際會議廳、大禮堂及壘球場大草 坪
時間 課程名稱 課程內容說明 時數
(時) 講師
9:10- 10:10
現場小組 作業前準 備與作業 方式
射源搜索演練作業 前說明
各組學員領取輻射 偵檢儀器及射源搜 索所需裝備
1
黃昭輝 潘宗梁 (核研所退休同
仁)
10:10- 11:10
射源搜索 實作第一 場
本次學員共分為四 組,前兩組先進行 室內射源搜索實 作,後兩組則進行 室外射源搜索實作
1
黃昭輝(室外) 潘宗梁(室內) (核研所退休同
仁)
11:20- 12:20
射源搜索 實作第二 場
交換場地,每組學 員需完成室內及室 外射源搜索練習
1
黃昭輝(室外) 潘宗梁(室內) (核研所退休同
仁)
13:00- 14:00
實作錄影 回顧與討 論
播放射源搜索實作 側錄影片
綜合討論
問卷填寫
1 許玉霞 (核研所)
圖 7 中山醫學大學賴全裕副教授講授呼吸防護具課程
圖 8 防護衣穿脫實作
圖 9 空中偵測結果分析與演算地表 1 公尺輻射劑量率課程
圖 10 輻射偵測與射源搜索概念說明課堂實況
圖 11 室內射源搜索實作
圖 12 戶外射源搜索實作
圖 13 實作錄影回顧與討論之進行
二、完備應變設備整備相關作業及其作業程序SOP
(一) 研究方法
研析由美國國家都市安全技術實驗室(NUSTL :National Urban Security Technology Laboratory)於 2017 年 11 月所發行 報告:“Radiological Dispersal Device(RDD) Response Guidance Planning for the First 100 Minutes”,並由研讀其內容來對我國 輻射應變技術隊程序書中有關輻射彈爆炸事件部分進行檢討 與提出修改意見。
(二)研究過程
假設現場輻射彈爆炸事件初期 100 分鐘應變時間的框架 下進行研究,來提供現場作業、公眾資訊和協調應變的技術建 議。100 分鐘為假設中央政府其他支援單位之輻射應變專業人 員與資源到達現場所需的最短時間,亦可視需要或實際現場 狀況調整時間長短。須注意在時間軸上有兩個關鍵假設:
1.在輻射彈爆炸事件應變初期數小時內,中央政府其他支 援單位不太可能已抵達現場,這意謂當地轄區和單位必須依 賴本身資產、技術裝備和訓練。
2.許多公共安全建議具時間敏感性,一個完整地方輻射彈 爆炸事件應變方案應該包括一個可達成的、詳細的時間軸讓 策略以及協調順利執行。
(三)研究成果
完成輻射彈爆炸事件應變導則:前100 分鐘計畫研究報告 一篇,內容摘要如下:
輻射彈爆炸事件前 100 分鐘科學的應變計畫導則描述了 應變的任務和策略,可以被第一線和地方應變人員與組織在 對戶外輻射彈爆炸後前 100 分鐘內應變救災中所執行,這些 應變計畫導則的訂定是基於可能發生之後果所作的真實評估 結果。導則中也包括設備需求建議,其中含個人防護裝備(PPE:
personal protective equipment)和公眾資訊。
輻射彈爆炸事件後前100 分鐘應變是非常重要的,這是因 為這段期間必須設下這整個應變作為的執行步驟。第一線應 變人員將負有多層任務如確認放射性外釋、執行搶救生命作 業、發布防護行動和封鎖調查現場,這些行動必須在第一線應 變人員抵達現場數分鐘內開始進行,這些早期行動的效果與 協調會確立在緊急階段與隨後階段當其他資源和專家團隊抵 達現場來支援應變後,所進行應變作業的成效。
本研究提供可行動導則,輻射彈爆炸事件應變導則的參考 文字和附加工具可以用來協助輻射彈爆炸事件現場有效應變 的計畫擬定,以便保護第一線應變人員與公眾,並且建立後續 資源整合的跨單位協調。
另亦完成常用 4 種個人輻射偵檢儀器操作與維護手冊及 影片各1 份。
三、輻射事件應變技術開發與研究
(一)研究方法
首先進行流體力學模式及擴散模式解析評估,因為環境風 場的特性,在於建築物周圍的流況相當複雜,建築物的幾何形 狀會直接對風場造成影響,因此模擬時應同時包含主建物及 其周遭的鄰近建築。於實際模擬時,為確保鄰近建築之影響有 被納入模擬中考量,常需將模擬域擴展至百公尺至公里之較 為寬廣的大小。而為精確模擬風場現象,所使用之網格又必須 足夠解析地形地物之幾何形狀及各式風場現象,寬廣的模擬 域與高解析度之網格配置兩者之因素將可能導致產生數量龐 大的網格,如此數量的網格不僅提高模擬的困難度,也會增加 前後資料處理的時間。因此,模式本身的強度,以及對於各種 資源的支援及使用上的效率與便利性也成為選擇模式的重要 關鍵。
(二)研究過程
1.流體力學模式簡介
流體力學模式 (Computational Fluid Dynamic, CFD)
是一種對於模擬複雜的地形地物,掌握複雜流場具有著 良好效果的工具,藉由 CFD 分析風場,可迅速且精準的 分析各建築物對整體風場之影響。因此,無論是於開發
階段對於 建築物的先期評估、環境風場的現況了解、行 人舒適度的評估改善方式,或是污染物傳輸行為的掌握,
皆非常適合以 CFD 作為研究方法。
CFD 的紊流計算方式被分類為三種: 1.數值直解法 (Direct Numerical Simulation , DNS)。2.大渦模擬法(Large- Eddy Simulation , LES)。3.雷諾平均數值模擬法(Reynolds Averaged Navier-Stokes Simulation , RANS)。理論上,確 切 地 運 用 正 確 邊 界 條 件 以 及 合 理 的 數 值 解 析 程 序 的 Navier-Stokes (NS)方程組,DNS 法要模擬任何一種紊流 流動都是可能的。然而在實際條件下,要呈現出所有的 渦流(最小為消散運動,最大至邊界尺寸),且計算時間的 間隔必須小到足以解析最快速的變動量(fluctuations),其 所需運算容量過大。因此,尚無法實際運用於實際條件 下之通風模擬。
大渦模擬(LES)則是對紊流運動中,受動量傳輸影 響之大渦運動以及受黏滯力影響之小渦運動,分別加以 計算。雖然 LES 法的優點在於可準確計算出大渦運動 的紊流傳遞,明顯地在紊流傳遞方式上優於 RANS 法,
也較 DNS 法更實際可行,唯仍需在大型快速的工作站平 台上運算,在目前建築設計應用上尚無法完全普及。
RANS 法則是使用紊流模型(turbulence model) 求 解整體平均數之Navier-Stokes 方程式,其中廣泛被使用 的則是 k-ε 紊流模型,在本土建築通風應用實例之模擬
與實驗數據比對結果中,k-ε 紊流模型是可接受的,可應 用在建築流場結構趨勢之預測。
2.擴散模式簡介
大氣擴散模式主要分成以下三種:高斯(Gaussian)擴 散模式、軌跡模式及網格模式,其中最被廣為討論的大 氣擴散模式是為點源高斯模式。點源高斯模式描述了空 間裡為數眾多的點之濃度。首先假設:1.污染物之排放速 率為一定。2.平均風速和風向一定。3.排放物的化學性質 穩定且不從周圍的空氣中下沈(fallout)。4.排放源的周圍 是平坦開闊的。物質隨風水平移動是由於一種風的平均 運動所造成,被稱為平流(advection)的橫向輸送形式。隨 風任意移動導致物質與平面風向呈現垂直上的縱向分布,
這被稱為擴散(diffusion)。高斯模式是在上述條件下,運 用質量不滅定律於排放物上所得的,此定律被寫成包括 描述平流和擴散二者的微分方程。方程式在穩定情況下 的一個解答通常是統計學中的常態分配,如圖14 的鐘形 曲線來描述排放源順風處的物質濃度。圖中座標系統之 x 軸表風向朝水平延伸,y 軸是在垂直於 x 軸的水平面 上,z 軸則為垂直延伸。圖 14 中,煙流(plume,如羽狀 物)的總高度比排放源的高度稍高些。該現象的發生是由 於氣體物質由像是煙囪這樣的點源排放出來,遇到大氣 時,一般而言會有額外的上升現象 (由於浮力、熱力和動 量作用)。如圖 14 中高度 h,表示有效排放高度取決於所
採用的標準方程式。
在點源高斯模式的一般形式下,可預測下風處某位 置(x,y,z)的濃度。通常採用以下簡化模式來預測點源下風 方向之地面處(z0 )污染物濃度:
c(x, y) = 𝑄
𝜋𝜎 𝜎 𝑈exp (− 𝑦
2𝜎 − ℎ 2𝜎 )
式中 Q 為固定的排放速率(mg /sec) ;U 為固定的風 速(m/sec) ;h 為煙囪的有效排放高度(公尺) ; 𝜎 為水平擴 散係數(公尺); 𝜎 為垂直擴散係數(公尺)。為了預測地面 任一點(x, y)濃度,首先要決定擴散係數𝜎 與𝜎 ,它們是 根據進行預測的氣象條件來決定的。數種有效推算𝜎 與 𝜎 的方法之一是利用經驗觀測所得的結果與適當的穩定 度分類相結合的方法。這種分類取決於地面風速、白天 入射的太陽輻射量和夜間的雲量。根據表 3 表示由這些 因素決定的 6 個穩定度分類,一旦分類被確定,根據 Turner(1969)研究指出水平擴散係數與排放源下風處距 離的關係與垂直擴散係數與排放源下風處距離的關係,
可分別用來估算𝜎 與𝜎 值。
表 3 穩定度分類的關鍵影響因素
為了檢驗其有效性,此點源高斯模式曾做過許多實 驗研究。一般而言,這種研究是先計算出模式參數𝜎 和 𝜎 及選用 Q、U 和 h 值,然後用上式預測並將其結果與 野外實測比較。許多有效的研究指出,當點源高斯模式 用於 CO、SO2 和懸浮微粒濃度的預測都合理的近似觀 測值。
擴散模式主要是從排放源去找到與受體相關的污染 影響情況。反之,如果想要知道,目前的髒空氣的氣團是 從哪裡來的呢?這就得要以逆軌跡模式 (back trajectory) 去反向找出來氣團的來源。假設氣團就是一個從地表到 上空的氣體柱,這個氣體柱會被水平方向的風吹著跑,
當然需要考慮到地形因素導致的風場變化。那麼,我們 先將需要模擬的區域的風場,全部抓出來,做個解析。舉 例來說,全台灣共有 70 個以上的環保署監測站資料,
裡面都有風速風向的資料。此外,比較具有代表性的,還 有中央氣象局的監測站資料,將這些資料全部取得,並
且每個資料加上經緯度座標,就可以知道同一時間每個 位置的風場變化。再經過時間內插,取得每分鐘的風場 變化狀態。最終風場圖示顯示如圖 15。
圖 15 的左邊圖示就是每個位置的風場,然後將你 需要推算軌跡線的(1)座標與(2)時間帶入到軌跡模式中,
軌跡模式就會透過你給的地點與時間,去找到該點的座 標位置與附近的風場,然後藉由逐時的風場計算每一分 鐘或數分鐘,該氣團的行進路線,最終就可以取得氣團 行進的路線,而推算出軌跡線。
如果軌跡線是往以前的時間推算,亦即推算該氣團 的來源,就稱為逆軌跡;如果軌跡線是往未來的時間推 算,亦即推算該氣團的走向,就稱為前軌跡。無論如何,
最終取得氣團在不同時間的座標,將座標連結起來,就 成為軌跡線。如圖 14 的右側圖示兩種軌跡線的推估,其 中紅色三角形是採用未校正風場;黑色菱形則是採用已 校正風場進行推估。
網格模式是將真實大氣以網格劃分(包括水平網格 與垂直網格),並假設每個網格內的物理、化學特性均一 致,最後針對每網格求解其統御方程式的數值解,由此 即可獲得污染物濃度在空間上的分布及其隨時間的變化 情形。網格模式採用的參考座標系統通常是尤拉(Eulerian) 座標系統,因此又稱為尤拉網格模式,其參考座標不隨 時間而改變。網格模式常用的數值解法為有限差分法
(finite difference method) 或 有 限 元 素 法 (finite element method)。此類模式考量詳細的污染物在大氣中的物理與 化學過程(包括傳輸、化學反應、乾沈降、雲與濕沈降、
氣膠等程序),且需要大量輸入資料(包括污染物排放量、
氣象、地形等),因此網格模式是含有最少假設、功能最 強大的空氣品質模式,但對於電腦資源之需求也較其他 類型模式大。
圖 14 煙流示意圖
圖 15 地表風場變化情況與軌跡推估示意(張能復,2004)
3.模式選用
因應符合輻射防護與緊急應變子項計畫之需求,需 要滿足以下條件,進行篩選:
1.能快速計算。
2.能使用區域性即時數值預報氣象資料,並且搭配 可以運用此種氣象場的大氣污染物擴散模式。
3.適合使用點源之大氣擴散模式。
4.模式模擬解析度需要能解析至城市尺度範圍。
5.模式模擬適合地形需要能因應臺灣的複雜地形。
在地形處理上 AERMOD 模式和 ISCST3 模式皆使 用分界流線的概念,當水平煙羽和抬升煙羽在通過山體 時,只是對複雜地形和簡單地形進行一體化處理,處理 精確度不高,分層簡化的處理結果與實際條件不一定完 全吻合,因此在處理近場複雜地形時,容易出現短期預 測結果超標的現象。CALPUFF 大氣污染控制模式使 用”slug 方法”,最終生成三維網格風場,更加真實地反映 出在地的氣象分佈及地形分佈,因此對於複雜流場和較 廣範圍條件下具有突出優勢。
為了因應即時輻射防護與緊急應變,需要較快速的
計算出輻射彈影響範圍,而 CALPUFF 模式與 Models- 3/CMAQ 相比,相對需要較少的計算資源,CALPUFF 模 式計算速度也比較快速。而從各大氣擴散模式的應用層 面,可以看到HYSPLIT 模式主要應用污染物長程傳輸並 追蹤其污染來源為主,而 CALPUFF 模式已有些跟核電 廠排放的污染有相關應用的研究產出。
綜合以上,CALPUFF 模式除了是美國 EPA 推薦模 式,符合本項計畫之需求也具有成熟的理論基礎和長期 的跟蹤改進及驗證研究,是一個成熟的應用模式。且 CALPUFF 模式可運用於複雜地形,非穩態的流場,在長 距離情況下可以矯正地形對流場的影響,而且在擴散計 算時可以根據具體流場特點選擇積分方式和擴散參數計 算方法。CALPUF 模式的計算區域可以從幾十米到上千 公里,從局部尺度到區域尺度,對於模擬突發核事故情 況下的短期及長期擴散非常適合。故此研究選擇使用 CALPUFF 模式系統來建置輻射彈爆炸事件市區小尺度 氣象模式中的大氣擴散模式。
(三)研究成果
本計畫完成 CFD 及擴散模式的引入與建置,詳細說明如 下:
1.CALPUFF 模式簡介
最早是由美國 Sigma Research Corporation(現在為 Earth Tech, Inc.的研究部門)發展 CALPUFF 擴散模式以 及相關模組與程式,且包含 CALMET 氣象模式(Scire et al., 2000)。初始由加州空氣資源管理局(California Air Resources Board, CARB)所贊助支持。 Sigma Research Corporation 交給 System Application, Inc.(SAI)來負責承 包 CALMET 模式的原始風場模組。於 1998 年美國空 氣品質模式工作小組委員會( Interagency Workgroup on Air Quality Model, IWAQM) 推 薦 使 用 CALPUFF/CALMET 模式,來估算有關於美國國家品質 空氣標準(NAAQS)與防止空品嚴重劣化指數(PSD)等的 空氣品質影響。美國環保署建議 CALPUFF 模式系統為 指導方針模式應用於管制目的,在涉及到長距離傳輸與 當非穩態效應為重要時的近場應用。
CALPUFF 模式系統包含 CALMET、CALPUFF、
CALPOST 以及一系列前處理程式,來與這些程式所需 要的氣象和地理資料作介面相容。此三大組成部分簡述 如下:
(1)CALMET:是在三維尺度的網格模擬區域中,呈 現逐時的風場與溫度場的氣象模式。對於二維場,如混 合層高度、地表特性、擴散特性等,也都包含在模式所產 生的輸出檔中。
(2)CALPUFF : 是 多 層 、 多 物 種 且 非 穩 態 的
Lagranigian 高斯煙陣模式,可模擬從污染源排放的污染 物,經過大氣擴散與化學轉化等程序後之變化。可應用 在CALMET 中產生的輸出檔,亦可使用較簡化的非網格 氣象資料如以存在的煙柱模式。空間與時間變異的氣象 條件下,藉由模式來結合煙陣在整個模擬期間下的結果 分佈。CALPUFF 基本輸出檔包含所選擇受體的小時濃度 或小時沉降通量。
(3) CALPOST:為後處理程式,以數據及圖表來總結 模擬的結果,舉例來說,如辨別在每一受體三小時平均 濃度中的最高與次高,亦能分別列出前幾十大值等。
2.CALPUFF 模式建置
CALPUFF 模式系統包含 CALMET、CALPUFF、
CALPOST 以及一系列處理程式,目前 CALPUFF 模式 最新系統版本為第 7 版,其中三個主要模式版本分別為 (1) CALPUFF - Version 7.2.1 - Level 150618 ; (2) CALMET - Version 6.5.0 - Level 150223 ; (3) CALPOST - Version 7.1.0 - Level 141010 ,其它處理程式可分為四類 分別為後處理、地球物理數據處理、數值天氣預報模型 處理及其他相關處理,其版本整理如表 4 至表 6。
因相關程序都在Linux 環境下運作,建置 CALPUFF 模式系統第一步為至 www.exponent.com 下載各模式的 相對應版本之壓縮檔(*.zip);第二步是確認系統編譯器版
本,及透過解壓縮指令(ex. tar -xvzf*.zip)解壓縮檔案並建 置目錄;第三部為利用編譯器進行編譯成各模式目錄下 相對應的執行檔(*.exe)及 FORTRAN 檔(*.for),舉例說明 如 CALMET 模 式 目 錄 下 會 有 calmet_v6.5.0.exe 及 calmet.for 檔,其編譯指令為 gfortran -o calmet_v6.5.0.exe calmet.for;此外,解壓縮檔內多為大寫的英文檔名,多 數在編譯時會出現錯誤其說明為找不到檔案,則需轉換 檔名為小寫英文檔名,透過Shell 批次檔來改檔名,其範 例如圖 16。
表 4 CALPUFF 模式系統所需之後處理程式及地球物理數據處理 程式
表 5 CALPUFF 模式系統所需之數值天氣預報模型處理程式
表 6 CALPUFF 模式系統所需之其他處理程式
圖 16 英文檔名大小寫轉換 Shell 批次檔範例
3.CALPUFF 模式之運作方法
在進行 CALPUFF 擴散模式模擬案例之前,必須先 處 理 欲 模 擬 案 例 相 配 合 的 氣 象 條 件 , 才 能 利 用 CALPUFF 模式預測污染物擴散的分佈情形。因此,首先 要處理模擬地區的地面與探空氣象資料及給定該地區地 理資料,經由程式作資料格式的轉換,轉換成為模式所 接受的格式,再搭配著CALMET 模式的控制檔設定,即 可進行演算並生成氣象輸出檔(CALMET.DAT)。
CALPUFF 模式必須要有三類的基本輸入設定:(1) 氣象資料檔(2)模式的參數控制檔(3)其他參數的輸入檔,
以下大略上說明,詳細說明請參照 CALPUFF 模式操作 手冊。
(1) 氣象資料檔(*.DAT):此檔案即是利用 CALMET 模式,配合相關的參數設定計算處理得到的檔案,可利 用PRTMET 後處理器程式,依照使用者的目的,輸出想 要得到的參數。可輸出的參數有每個垂直層逐時的水平 風向風速、垂直向的風速大小、溫度場、莫寧赫夫尺度、
大氣穩定度、混合層高度、地表溫度、地表空氣密度、摩 擦速度等。
(2) 參數的控制檔(*.INP):此檔案中包括了八個控制 單元(a)網格設定單元(b)模擬物種設定單元(c)化學轉化 單元(d)沉降設定單元(e)模式控制選項單元(f)污染源設
定單元(g)受體資訊單元(h)模式輸出單元。說明如下:
(a) 網格設定單元:包括地圖的投影方式、氣象格網 的水平(x, y)及垂直項(z)設定、網格解析度大小、欲處理 的計算網格範圍。
(b) 模擬物種設定單元:本單元可選擇欲模擬或排放 的污染物種,亦可配合化學轉化選項設定來選取模擬污 染物種。
(c) 化學轉化單元:包括了化學轉化方法的設定,且 模式還必須有逐時背景臭氧濃度檔(OZONE.DAT)的輸 入,倘若沒有輸入此檔,亦可自行輸入每個月的臭氧濃 度或是NH3 濃度來當作備用的方法。此單元亦有以預設 值輸入的夜間化學轉化率於此。
(d) 沉降設定單元:沉降單元有乾沉降與濕沉降兩部 份,並且有各個污染物相互配合的參數預設值配合於此 來使用。
(e) 模式控制選項單元:
氣象資料的格式選擇
都市土地利用的範圍
風速剖面的類型,是屬於 ISC 鄉村型或是都 市型
煙流上升是否模擬
煙囪頂端下洗作用是否模擬
煙囪頂端上的垂直風切效應是否模擬
煙流部分滲入逆溫層是否模擬
煙流模擬的計算方式是以 Puff 還是 Slug 的方 式
擴散係數的計算方式選擇
是否使用 PDF 的方式處理 Sigma-z
地形效應的處理,是否為平坦或是複雜地形 (f) 污染源設定單元:
點源:點源座標位置、煙囪高度、點源地表高 程、煙囪出口直徑、煙氣出口速度、煙氣出口 溫度、鄰近建築物的高度及寬度、各種污染物 的排放率、動量通量因子。
線源:每段線源的開始點及結束點的座標位 置、釋放高度、線源地表高程、各種污染物的 排放率。
面源:面源有效高度、面源地表高程、Initial- Sigmas z、四個角落的座標位置(四邊形可以 是任何形狀)、各種污染物的排放率。
體源:體源座標位置、體源有效高度、體源地 表高程、Initial Sigma-y 與 Sigma-z、各種污染 物的排放率。
(g) 受體資訊單元:要模擬的受體在此單元分為三類,
分 為 網 格 受 體(gridded receptor) 、 離 散 受 體 (discrete
receptor)、與 CTSG Receptor,並可以輸入受體的座標位 置、受體點的高度、受體點地面高程。由此單元可定義出 欲模擬區域的範圍。
(h) 模式輸出單元:在此可輸出的單元有各個污染物 的濃度值、乾濕沉降量,且可依照使用者需求要每隔幾 小時輸出一次於List File 中。另外還可以輸出 Debug 檔 案,追溯Puffs 在傳輸擴散期間內的成長情形及相對位置 等。
(3) 其他的參數檔輸入:此類的參數檔輸入,都具有 選擇性的,模式不強制一定要輸入,這類的參數檔在模 式中有複雜地勢的地形或受體資料檔、隨時間變異的污 染源排放量檔等。以上都可依照使用者的需求來自由選 用。
CALPUFF 系統運算流程如圖 17 所示。
圖 17 CALPUFF 模式運算流程
4.簡易建物運跑測試
由於輻射彈很可能會在人口密集的都市開放空間,
如市區街道中引爆並隨建築物周圍之大氣擴散污染物,
因此根據臺灣主要地標及附近周圍進行建物模型建置。
首先根據前述的運算流程先處理 CALMET 模式的地形 設定,將收集之中華民國內政部公開資料的30m 水平解 析度的地形資料引進 CALMET 模式並先選取範圍以臺 北 101 大樓為中心點半徑五公里的距離內之區域為分析 對象(如圖 18),取出地形如圖 19 所示。圖中所示臺北 101 大樓附近地形多為海拔 20 公尺左右平地,在 101 大 樓東側為四獸山群,海拔最高高度為344.7 公尺。氣象資
料由CWB/WRF 模式輸出之水平解析度 1 公里逐時氣象 資料,引入CALMET 做降尺度處理成 250 公尺水平解析 度,結果如圖 20 所示,圖中顯示主要風向為東北風。
單一建築模型根據臺灣首都臺北的地標臺北 101 大 樓進行建物模型外觀設計(如圖 21 所示)。臺北 101 是位 於臺灣臺北市信義區的摩天大樓,總高度包含尖頂及天 線約509 公尺,不包含尖頂及天線約 449 公尺,地上 101 層、地下5 層,總樓地板面積 37 萬 1 千平方公尺,主體 建築旁有六層樓,約60 公尺高的「裙樓」為購物中心,
主體建築最寬處的寬度約55 公尺。故此研究先以高度不 含尖頂及天線449 公尺以及寬度 55 公尺的長方形柱體進 行建物模型建置。CALPUFF 模式設定文件中的 Subgroup (13c)(如圖 22)建置相對應的模型高度、寬度。
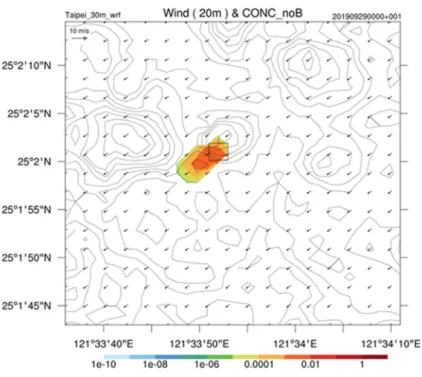
單一簡易建物運跑測試中,先以污染物碘-131 的乾 濕沉降參數進行模擬測試,模式設計輸入之輻射彈參數 如表7,假設輻射彈大小半徑為 0.3 公尺,污染物排放速 率為 1.0E01 Bq/s,爆炸位置為 101 大樓東北方的 10 公 尺處,模擬示意圖如圖 23 至圖 24。
圖 23 為無建築物影響之模擬分析結果,污染物以 高斯分布的進行擴散。在有單一建築影響下,如圖 24 所 示會在建築西南側有較高累積污染物濃度。
多建物簡易運跑測試與單一建物建模方式簡易運跑 測試方法相同。在CALPUFF 模式設定文件中的 Subgroup
(13c)建置相對應的模型高度、寬度。此次設計在 101 大 樓西方(左側)5 公尺處建置一長 70 公尺,寬 30 公尺,高 度為45 公尺之建築模型進行測試,模擬參數如表 8,模 擬結果如圖 25。圖中所示在兩個建築物西南側有較高累 積污染物濃度,且較單一建築時污染物濃度更高,高濃 度之分布範圍較大。當兩棟大樓靠近時,會因大樓夾擠 效應導致風速加大,以30 公尺水平解析度的結果來看,
類似夾擠效應導致的污染物分布變較為細長。
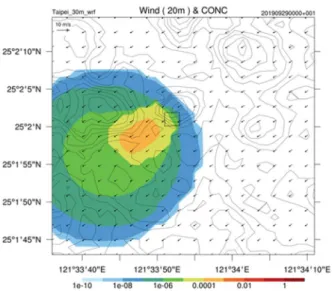
接著當水平解析度提高為 3 公尺時的運跑測試,模 式設定如表9。當水平解析度提高為 10 倍時,在相同輸 出資料筆數條件下,模式計算時間從2 秒增加為 3600 秒。
提升模式水平解析度模擬結果如圖 26 所示,同於 30 公 尺水平解析度兩個建築物模擬結果在建築物西南側有較 高累積污染物濃度,且高濃度的分布更為細長,解析度 提升可以更細緻看到污染物的分布結果。
表 7 輻射彈設定參數
表 8 建築物設定
表 9 模式水平解析度設定
圖 18 Google 地圖之臺北 101 大樓周圍五公里範圍示意圖(黑色框線 內)
圖 19 臺北 101 大樓附近五公里範圍之地形圖
圖 20 CALMET 降尺度之 250 公尺水平解析度氣象資料風場分布圖 (輪廓線為地形高度分布,紅線為臺北市市界線)
圖 21 臺北 101 大樓示意圖
圖 22 CALPUFF 模式設定文件範例
圖 23 CALPUFF 水平解析度 30 公尺無建物影響之模擬結果 (填色部分為濃度柱狀累積分布單位為 Bq/𝑚 )
圖 24 CALPUFF 水平解析度 30 公尺單一建物影響之模擬結果 (填色部分為濃度柱狀累積分布單位為 Bq/𝑚 ,黑色方框為 101 的建
物範圍)
圖 25 CALPUFF 水平解析度 30 公尺多建物影響之模擬結果 (填色部分為濃度柱狀累積分布單位為 Bq/𝑚 ,黑色方框為 101 的建
物範圍)
圖 26 CALPUFF 水平解析度 3 公尺多建物影響之模擬結果 (填色部分為濃度柱狀累積分布單位為 Bq/𝑚 ,黑色方框為 101 的建
物範圍)
圖 27 CALPUFF 水平解析度 3 公尺多建物影響之模擬結果與 Google 地圖之疊圖
四、建置遠端遙控行動式輻射偵測平台 (一)研究方法
本計畫先參考圖 28 之遠端遙控輻射偵測平台之技術研 發示意圖,進行遙控行動式輻射偵測平台的建置規劃,並依計 畫執行過程所發現新的需求,適度策略滾動修正載具平台規 格。行動式輻射偵測載台可經由遠端操控,執行輻射偵測、環 境感測、環景影像監視之畫面與量測數據整合通訊,讓控制人 員於遠端遙控操作人機介面,並即時傳輸相關監測資訊,使得 應變人員進入現場前,預先了解狀況與潛在之危害,降低應變 人員遭受輻射曝露、高溫、粉塵、高濃度二氧化碳、潛在爆裂 物等之健康風險。計畫第一年以戶外型手持遙控輻射偵測載 具車台開發建置為主軸,並預留至少20 公斤載重能力與相關 訊號處理、系統控制擴充規格與介面,以備第2 年(110 年2) 增加機械手臂、夾具、GPS 定位、4G 訊號傳輸模組功能,延 伸無線遙控傳輸距離,與夾取潛在輻射污染碎片之功能。
配合戶外混凝土或柏油路地形,規劃採用輪式載具台,其 優點為質量輕、速度快、機動靈活、效率高、不易損壞路面。
雖然其垂直越障跨越能力差、但仍被廣泛應用,各類型戶外載 具動力輪組比較說明如表10 所述。
表 10 戶外載具動力輪組比較說明表
動力
輪組 優點 缺點 備註
輪式 機組
避震效果好,移動 靈活且速度快。
應用範圍廣,行駛 距離長。
機 構 簡 便 維 護 容 易。
操控便利性佳。
可經由變更輪胎型 式,因應越野/沙灘 地 形 應 用( 如 沙 灘 車、越野車系等)。
容易受限於地形地貌,
荷重能力較履帶差。
可經由變更輪胎樣 式,達到越野功能 需求。
機動性佳、佈署容 易、行駛距離長。
履帶 機組
可克服複雜地形地 貌,荷重能力佳。
移動速度慢,避震能力 差且維護保養不易。
震動性大,可能影響平 台搭載設備之穩定性。
耗能,運行距離相對 短。
靈活性相對差,轉向操 控不易,金屬履帶容易 損傷路面。
動力機組設計基本重 量高,體積較大,不適 合輕載場域應用。
載具移動運作時,
過大震動會影響其 搭載光學或電子組 件的運作可靠度。
適用嚴苛複雜多變 場域,可設計爬梯 應用。
輻射偵檢載具歸類為智慧型機器人的一種,此載具能夠透 過網路通訊將感測器量測資料、即時影像畫面、運算單元及機 器人控制器結合至區域網路。並透過 ROS Topic 及 RESTFul API 等通訊協議,進行資訊交換,實現雲端控制,並具有良好 的跨平台通用性與擴充性。
ROS 可透過網路等常用通訊協定,將來自控制板的命令 下達到微控制器和接收來自於控制器的命令,亦可接收來自 各感測器的回傳訊息,以此模式建構之遙控行動式輻射偵測 平台,後續可擴充至遠端操控模式,並支援環境偵測資訊即時 回傳需求。
遠端遙控行動式輻射偵測載具由執行機構、驅動裝置、檢 測裝置和控制系統等基本元件所組成。其中又可分為三大模 組及六個子系統。三大模組分別是感測器模組、控制模組和驅 動模組。六個子系統是驅動系統、載具結構系統、感受系統、
載具與環境交換系統、人機交換系統和控制系統。載具的「大 腦」通常是由電腦或微控制器組成。它可收集周圍環境的信 息,並根據收集到的環境情況向執行機構發出命令,驅動載具 完成各種指令動作。
計畫第一階段,先以近端遙控方式建構遙控行動式輻射 偵測平台,遙控距離規劃為於可視區域20 公尺內可進行操控,
運作訊號流程圖如圖 29 右下方紅色區塊處所示。初期採開迴 路方式設計,以手持遙控器直接操控載具施行環境偵測任務,
載具預留智慧控制模組導入區塊,後續搭配相關控制機組、定
位/防護感測器,並導入自走程式形成必迴路系統,即可透過 網路進行命令傳輸,於中控室進行遠端遙控偵蒐作業。
圖 29 遙控型行動式載具操控訊號流程架構圖
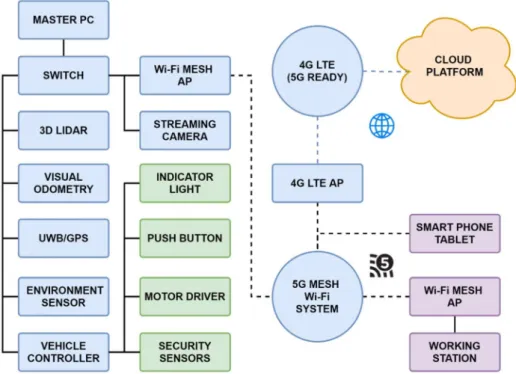
為使行動式輻射偵測平台內部多個子系統能夠順利相互 通訊,採用全網路通訊機制,讓所有的資料交換接能夠過網路 通訊完成,其實體通訊架構規劃可參照圖 30 所示。該通訊架 構圖藍色區塊部分組件都為網路化模組,可直接利用網路通 訊達成所有的資料交換及控制。
綠色區塊部分組件屬於非網路化模組,需經過網路化的控 制器組件,使其能夠透過網路通訊與其它非網路化模組資料 交換。紫色部分為外部裝置,可直接利用網路通訊模式,與行 動式輻射偵測平台任一裝置組件進行資料交換。此通訊架構 具有非常好的穩定性以及擴充性,能夠快速地與其他系統互 相整合,方便後續與雲端系統整合,達到多機協作、遠端資料 蒐集及監控等作業需求。
圖 30 行動式輻射偵測平台實體通訊架構圖
Rosserial package 能夠使只有支援串列通訊的模組,也能 夠收發ROS topic,但必須在模組本身也支援 Rosserial 協定的 情況下才能完成,然而大多數支援串列通訊的模組並不支援 Rosserial 協定。此時需額外建構串列通訊轉模組(如圖 31 所 示),用以將一般串列通訊轉換為 ROS topic,同時這個驅動程 式也是一個ROS node。此架構任何支援串列通訊的模組,都 能導入整個ROS 通訊系統中,並與其它子系統模組/程式協作 進行資料交換。計畫中使用的輻射偵檢器將使用此架構開發 通訊模組,鏈結到遙控輻射偵測平台的主控系統,讓現有載具 平台上方搭載之輻射偵檢器與環境感測模組的探測資料,能 夠回傳主控端,並進一步的應用於其它程式(如熱區探測、環 境地圖疊加與路徑規劃等)。
圖 31 串列通訊轉模組架構圖
(二)研究過程
考量遙控行動式輻射偵測平台主要運行環境為戶外場 域,初期計畫書規劃場域是以戶外平整路面地形為主,隨著任 務演練場域複雜度提升,增加崎嶇路面、草地與沙灘場景等多 元地貌場域應用的考量,以及後續平台上方機械手臂搭載,與 遠端中控室操作等需求,逐步調整載具車體尺寸與輪式架構。
因應輻射事件緊急應變與多元化場域應用需求,戶外型 移動載具底盤動力模組規劃 6 輪式傳動底盤車台,採全驅輪 組傳動架構,由前輪轉向方式操控載具運動,期間可經更換輪 型方式,達到多元地貌應用需求,並適度降低車載量測儀器與 光學感測元件震動損害。初期採手持遙控模組操控行動式輻 射偵測平台環境偵測任務,後續規劃加載光學雷達/視覺輔助 定位施行地圖建模、影像擷取與環境參數偵測功能,並導入 4G LTE 通訊與 GPS 定位機制,用以擴增戶外場域操控與通 訊傳輸能力。因應計畫任務需求,車台考量IP55 防塵防水結 構設計,並預留機械手臂架設空間,用以因應遠端夾取物件需 求,整體行動式輻射偵測平台規劃示意圖與機能如圖 32 所示。
圖 32 遙控行動式輻射偵測平台設計模型
現階段遙控行動式輻射偵測平台通訊系統架構由 Wi-Fi Mesh 及 4G LTE 行動網路組成(參考圖 33)。Wi-Fi Mesh 網絡 由多個Wi-Fi 節點構成,所有的節點都互相連接,每個節點擁 有多條連接通道,當某一條線路堵塞或者無回應時,Wi-Fi Mesh 網絡可以根據現況選擇其他的線路進行數據傳輸,任何 一個節點故障都不影響網絡的連接,可靠性非常高;並且網絡 發生故障時可自動修復,確保網絡高速流暢。遙控行動式輻射 偵測平台於Wi-Fi Mesh 涵蓋場域內作業時,與工作站及 IOT 裝置等連網設備緊密連結,作業場域內的設備都能輕易透過 4G LTE 行動網路連結雲端資料。Wi-Fi 節點模組外殼採用 IP67 等級防護盒,盒內包含Wi-Fi Mesh 通訊機組及鋰電池模組,
可於戶外快速架設網路通訊系統,在短期間內無需顧慮電源 供應問題。
圖 33 載具搭載 Wi-Fi Mesh 及 4G LTE 行動網路通訊架構 現階段最容易取得,且在成本效益考量下的 5G 訊號鏈 結的設備,為支援5G 頻段的智慧型手機。可利用 5G 智慧型 手機透過USB Tethering 提供整個 Wi-Fi Mesh 網際網路(實作 方式參考圖 34)。
圖 34 高速 5G 通訊架構擴充模式
在遙控行動式輻射偵測平台戶外定位架構中,規劃採用 普及化的全球定位系統,搭載現有商用GPS-RTK 模組,可於 戶外場域進行公分級全域定位。Real Time Kinumatic 即時動 態定位技術是利用衛星達到即時精準定位的一種技術,同時 在參考站與移動站接收衛星資料,透過通訊設備,將參考站的
觀測資料傳送給移動站,移動站再透過差分計算,可以在移動 時即時獲得精確的定位坐標。
遙控行動式輻射偵測平台轉向操控,規劃採用汽車移動 模型之阿克曼轉向[3]作為底盤轉向設計模式,讓行動式輻射偵 測平台具備適應多種地形的能力。並且相較於適合室內的差 速轉向移動載具,它能夠以更高的速度穩定行駛於戶外場域,
圖 35 為阿克曼轉向運動模型架構示意圖。
圖 35 阿克曼轉向運動設計模型
遙控行動式輻射偵測平台因應任務需求,設計預留至少 50 kg 之載重能力(為搭載較大擺弧範圍商用機械手臂,及車 台預留載運夾取物件需求,大幅提升原先計劃書預劃之載重 能力,由20 kg 加至 50 kg),並增加裝置機械手臂與載物的空 間,作為遠端物件夾取任務應用,且在搭載機械手臂後,仍可 於戶外崎嶇路面正常運行,故需提升載具底盤車體尺寸規格。
因 應 車 體 剛 性 結 構 強 度 與 車 台 重 量 評 估 需 求 , 利 用 Autodesk Inventor 軟體進行車體結構應力應變和模態分析,以 市售商規 3030 鋁擠型柱體作為車台結構材料,在主體承受 1470N(約計 150 公斤)局部應力下,車體主樑變形量小於 0.1mm(可參考圖 36)。所以當車體重量(含電控元件)壓制在 80kg 以內,載具尺寸約計 1540mm*760mm*510mm,此時車 體將有充足載重能力加裝機械手臂。依此較大尺寸車體規模,
採用 6 輪式獨立驅動方式運行,可減低各車輪局部受力,提 升車體穩定性。並可利用更換輪型方式,達到多元地貌應用需 求。車台採取 IP55 防塵防水結構設計,在環境狀態(含輻射) 偵檢過程中遭受污染,仍可適度施行清洗作業。載具車台初期 採用無線遙控介面操控運型,加載環境偵測模組(空間輻射計、
溫度、濕度、CO2及PM2.5 感測器),並導入網路通訊鏈結方 式即時傳輸偵檢資訊,後續也便於施行遠端遙控機制整合作 業,達到中控室遠端操控與緊急應變作業需求。
圖 36 載具底盤結構應力分析圖
依上述設計條件,完成初款遙控式戶外型移動載具平台,
良好的底盤設計,能使遙控行動式輻射偵測平台能夠於戶外 多元地貌的場域移動,圖 37 為初代戶外型輻射偵測平台戶外 實測運行紀錄,載具在未鋪設柏油路面道路的區域也可以順 利遙控移動,能輕易越過150mm 高度之人行道障礙。具有良 好的負重能力,搭載60 公斤負載,仍可於戶外場地穩定行駛。
六輪驅動設計,使載具有良好的爬坡能力,輕鬆爬上40 度陡 坡,適應各種地形。載具上方搭載環境感測模組與空間輻射偵 檢模組,現階段可利用手持遙控載具平台接近輻射源,直接量 測輻射劑量值,並經場域構建之WiFi 通訊模式,即時回傳偵 測資訊(參考圖 38)。
圖 37 初代戶外型輻射偵測平台戶外運行測試實況
圖 38 環境偵測資訊即時回傳展示
因應地貌變化落差較大地形或沙灘場域行走作業,另外設 計一組降低車身重心結構載具,採取六輪獨立懸吊系統設計 (如圖 39 所示)。此設計讓輻射偵測平台於戶外作業時,可更 貼合多元地面,並可降低使用越野款式輪胎(例如人字胎面)時 的震動效應,減少載具內部電控元件與偵檢儀器的損傷。此外 車身上設計載重區,全區由獨立懸吊系統支撐,提共了載重區 平穩的支撐力。可用於裝設機械手臂及特殊容器,使戶外型輻 射偵測平台有良好的機械手臂擴充性。
圖 39 二階動力款車台設計
載具車體採六輪獨立驅動,每輪搭配一個 70W 功率的直 流無刷馬達及控制器獨力驅動。此配置下車台設計,可精確掌 控各輪運動狀態及動力輸出使用步進馬達裝配機械式絕對式 編碼器,即使在斷電情況也能夠掌握馬達絕對角度,無需外部 檢知器,就能夠掌握轉向極限,減少機構複雜程度,同時提升 穩定性。搭配電子差速可讓戶外型輻射偵測平台,有良好的轉 向控制性能,並能依照行走現況調配電子差速,可防止輪胎打 滑影響系統定位精確度問題。二階車體平台已完成平台建構 (圖 40),持續完善車體操控機能與系統調校,讓操作人員可 在中控室內,遠端操控戶外型輻射偵測平台施行緊急應變任 務。光學雷達、視覺里程之影像定位模組及機械手臂等模組,
規劃將加載於二階動力款式車台,用以滿足輻射災害緊急應 變任務需求。
圖 40 二階動力款車台實體外觀圖
計畫書排定每兩個月進行計畫查核與檢討作業,配合實際 需求滾動修訂遙控式戶外型輻射偵檢載具設計規格,表11 展 示戶外型輻射偵測平台計畫書目標規劃與滾動式演進修訂現 況,及後續搭載機械手臂之載具規格與機能彙整表。車台為了
搭載商用型多軸機械手臂,且能運行於戶外崎嶇路況,需增加 載具底盤車體尺寸與載重能力,可增加載具多元地貌行走穩 定度,故載具由原先規劃 20 公斤載重能力,提升至 50 公斤 載重能力,用以滿足載具搭載較大擺弧範圍之機械手臂應用。
因應計畫經費限制,載具初期以手持遙控方式操作運行,後續 再擴展至中控室操控機能,可遠端遙控載具,進行環境探索、
輻射偵蒐與物件夾取應用等任務。
表 11 戶外型輻射偵測載具規格設計與現況說明表
計劃書目標 載具現況(109) 載具後續規劃(110)
適用場域 戶外型場域,水泥路面。 戶外型場域,50mm 障礙(實際至少可達 150mm)
驅動方式 4 輪(含以上) 6 輪驅動/前輪轉向 替換式輪胎
越障能力 50mm(爬15%坡度) 150 mm(實測40%坡度) 200mm
防塵防水 IP 55
車體尺寸
(±10cm) L70/W65/H50 [cm] L150/W75/H50 [cm] L150/W100/H80 [cm]
載重能力 20 kg(載重) 80kg(車重)/50kg(載重) 搭載手臂(餘 20kg 載重) 通訊方式 4G LTE+Wi-Fi 4G LTE+Wi-Fi 4G LTE(5G)+Wi-Fi
操作距離 4G LTE 涵蓋範圍/手持控制器遙控(20m)
定位方式 109 年:近端遙控
110 年:中控室連結操作 GPS 定位資訊回饋 中控室遠端連結操作,
物件識別定位。
(3D LiDAR+深度相機 +GPS RTK)
搭載配件 環境感測器(空間輻射、溫
度、濕度、粉塵、CO2等)
環境感測器+預留機械 手臂搭載空間與界面
加載機械手臂(UR10)
即時影像 影像遙控裝置 前視角單鏡頭 多鏡頭(車台環景影像)
雲端連線 預留雲端資料儲存通訊界面
載具功能 開發可於非平坦地型移動
之地面遠端遙控載具,並可 搭載多種手持式/行動式輻 射偵檢設備,執行遠端輻射 劑量/污染偵測。
手持遙控操作、即時環 境監測(含空間輻射劑 量偵測)、4G LTE+WiFi 無線通訊傳輸。
遠端中控室遙控操作、
即時環境監測、光達(光 學量測與避障)、視覺輔 助、GPS 定位、4G/5G 通 訊傳輸與地圖建模,支
(三)研究產出
計畫年度產出實體戶外型遙控移動載具底盤動力模組乙 部,載具搭載空間輻射偵檢模組,以 WiFi 5G 通訊模式建構 遠端操控平台,可遙控載具執行射源偵蒐任務,並即時回傳偵 測數據。
五、建置輻射災害應變資訊平台
(一)研究方法
以美國國土安全部文件 U.S. Homeland, “RDD Response Guidance”, 2016.做為資訊平台針對輻射彈爆炸事件研析事件 資訊之功能需求,而其他輻應隊任務相關、非輻射彈爆炸事件 之輻射事件,則以國際原子能總署文件 INTERNATIONAL ATOMIC ENERGY AGENCY, “Manual for First Responders to a Radiological Emergency”, 2006 做為研析平台使用者介面與功 能之參考來源。
另外,為因應輻應隊平時整備需求,依往年整備訓練等經 驗,同時規劃增添資訊平台於平時可建立、編輯應變人員名 單、相關儀器物品清單與訓練課程之資料庫功能。
(二) 研究過程
援機械手臂夾取試件。
考量應變過程中,於電子地圖上進行線上繪圖功能,可協 助提升指揮中心與現場輻應隊成員之間的溝通效能與正確性,
選用線上繪圖程式庫較為完整之Google 電子線上地圖,再發 展實際使用者介面與功能雛型。
1.事件資訊功能需求計有:
(1)確認爆炸現場含有輻射
(2)通知應變人員與民眾初始熱區與疏散區 (3)量測並映射輻射強度至各相關區域與下風處
2. 人員資訊功能需求計有:
(1)服務單位、人名、電話、手機、輻應隊職稱、資訊最新更 動日期與更新人員人名(預計包含輻應隊與各縣市對口單 位人員名單)。
(2)提供搜尋框與自動完成功能搜尋人名。
(3)提供各欄位排序功能與下載報表為 ODF 檔功能。
(4)提供新增、刪減人員、異動此筆資訊之人員人名與留存 三年內紀錄之功能。
(5)依使用者權限提供瀏覽或編輯功能。
3. 儀器/物品資訊功能需求計有:
(1)欄位計有:儀器/物品種類(概略列舉如下)、儀器/物品名稱、
儀器/物品型號、儀器/物品數量、保管單位、保管地點、
保管人名、電話、手機、資訊最新更動日期、更新資訊之 人名、圖片。
(2)提供搜尋框與自動完成功能搜尋儀器/物品。
(3)提供各欄位排序、數量統計功能與下載報表為 ODF 檔功 能。
(4)依使用者權限提供瀏覽或編輯功能。
(5)提供使用者新增儀器/物品種類與名稱功能。
4. 訓練資訊功能需求計有:
(1)歷年資料庫欄位計有:課程名稱、講師人名、單位、資訊 最新更新日期與更新人員人名、授課年度、講義、影片。
(2)課程名稱、學員人名、單位、電話、用餐需求核取方塊與 葷素核取方塊、公務人員學分需求核取方塊,輻防積分需 求核取方塊與身分證字號。
(3)提供課程搜尋輸入框與自動完成功能搜尋。
(4)依登入者權限提供講義、影片上傳、下載、刪除功能。
(5)提供新增、刪減、編輯課程、講義、影片、異動此筆資訊 之人員人名與留存三年內紀錄之功能。
(三)研究產出
今年度已完成平台雛型功能規劃,其介面如表 12 至表 41。
表 12 指揮中心端點使用者介面與功能畫面(系統管理-1)
一. 系統管理 驗收結果: ■相符 不相符 1.權限管理:主要區分為系統管理、儀器管理、人員管理、訓練管理、事件管 理等五大權限設定種類。
表 13 指揮中心端點使用者介面與功能畫面(系統管理-2)
一. 系統管理 驗收結果: ■相符 不相符 2.各權限種類下,權限區分為管理員、讀寫員、瀏覽員等三種不同身分等級。
3.各權限種類管理員具有審核所有帳號申請該權限之身分等級權利,並具有資 料創建、編輯、刪除、下載與瀏覽之權限。
4.各權限種類讀寫員具有資料創建、編輯、刪除、下載與瀏覽之權限。
5.各權限種類瀏覽員具有資料下載與瀏覽之權限。
6.同一帳號可同時套用到不同種類權限管理應用。
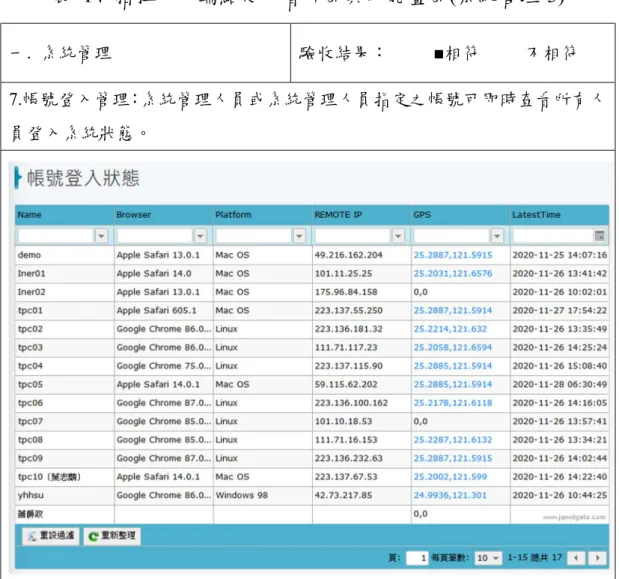
表 14 指揮中心端點使用者介面與功能畫面(系統管理-3)
一. 系統管理 驗收結果: ■相符 不相符 7.帳號登入管理:系統管理人員或系統管理人員指定之帳號可即時查看所有人 員登入系統狀態。
表 15 指揮中心端點使用者介面與功能畫面(儀器管理)
二. 儀器管理 驗收結果: ■相符 不相符 1.資料庫欄位計有:儀器名稱、保管人名、單位、電話、手機、資料最新更新日 期與更新人員人名、儀器種類、校正日期、財產編號、圖片與攜出人名。
表 16 指揮中心端點使用者介面與功能畫面(人員管理)
三.人員管理 驗收結果: ■相符 不
相符
1.人員資料庫欄位計有:人名、密碼、單位、電話、手機、輻應隊職稱、資料最 新更新日期與更新人員人名。
2.提供關鍵字搜尋框與自動完成功能搜尋人名。
3.提供各欄位排序功能。
5.依登入者權限提供瀏覽或編輯功能。
表 17 指揮中心端點使用者介面與功能畫面(群組管理-1)
四. 群組管理 驗收結果: ■相符 不相 符
1.群組資料庫欄位計有:群組名稱、群組備註、資料最新更新日期與更新人員 人名。
2.提供關鍵字搜尋框與自動完成功能搜尋群組。
3.提供各欄位排序功能。
表 18 指揮中心端點使用者介面與功能畫面(群組管理-2)
四. 群組管理 驗收結果: ■相符 不相 符
5.依登入者權限提供瀏覽或編輯功能。
表 19 指揮中心端點使用者介面與功能畫面(事件資訊-1)
五. 事件即時圖台資訊 驗收結果: ■相符 不相符
1.採用全螢幕分割區域方式顯示,可於一個螢幕上同時查看人員部署、儀器分 佈、事件狀態、地圖等相關資訊。
表 20 指揮中心端點使用者介面與功能畫面(事件資訊-2)
五. 事件即時圖台資訊 驗收結果: ■相符 不相符
2. 自動監測部署與回報
(1) 顯示可選取的事件及可用儀器。
表 21 指揮中心端點使用者介面與功能畫面(事件資訊-3)
五. 事件即時圖台資訊 驗收結果: ■相符 不相符
2. 自動監測部署與回報
(2) 部署自動監測儀器(開啟電源後)於平台確認部署完成。
表 22 指揮中心端點使用者介面與功能畫面(事件資訊-4)
五. 事件即時圖台資訊 驗收結果: ■相符 不相 符
3. 人工監測部署與回報 (1) 顯示可選取的事件。
表 23 指揮中心端點使用者介面與功能畫面(事件資訊-5)
五. 事件即時圖台資訊 驗收結果: ■相符 不相符
3. 人工監測部署與回報
(2) 提供可供標注日期時間方式。
(3) 輸入事件說明備註並可上傳現場照片或影音。
表 24 指揮中心端點使用者介面與功能畫面(事件資訊-6)
五. 事件即時圖台資訊 驗收結果: ■相符 不 相符
3. 人工監測部署與回報 (1) 顯示可選取的可用儀器。
(4) 標註地點量測值:提供 α、β、γ 量測選單,提供輸入框使用者自行輸入數 字,提供預設之單位選單(α:cps、cpm,β:cps、cpm、γ:μSv/h、mSv/h)。
表 25 指揮中心端點使用者介面與功能畫面(事件資訊-7)
五. 事件即時圖台資訊 驗收結果: ■相符 不相 符
4. 人員部署:
(1) 與群組管理資料及人員資料連動。
(2) 可以列表或地圖方式查看各人員登入及即時所處地點,檢視方式可依條件 過濾顯示。
表 26 指揮中心端點使用者介面與功能畫面(事件資訊-8)
五. 事件即時圖台資訊 驗收結果: ■相符 不相符 5. 事件狀態:可以新增、編輯、終止事件。
表 27 指揮中心端點使用者介面與功能畫面(事件資訊-9)
五. 事件即時圖台資訊 驗收結果: ■相符 不相 符
6. 任務分派與回報:可分派各人員任務、接收任務資訊、回報任務執行狀況。
表 28 指揮中心端點使用者介面與功能畫面(事件資訊-10)
五. 事件即時圖台資訊 驗收結果: ■相符 不 相符
7. 圖層及圖示管理:
(1) 提供平台線上地圖繪圖加入與刪除功能:線、圓、矩形及多邊形,線條顏色 分有紫、紅、黃、綠、藍色:
表 29 指揮中心端點使用者介面與功能畫面(事件資訊-11)
五. 事件即時圖台資訊 驗收結果: ■相符 不相符
7. 圖層及圖示管理:
(2) 線:可採手繪、輸入兩點經緯度、輸入兩點地址 3 種方法。
(3) 圓: 可採手繪、輸入圓心與輸入半徑(單位:公尺/公里)。
(4) 矩形及多邊形: 可採手繪、輸入各點經緯度、輸入各點地址 3 種方法。