行政院國家科學委員會專題研究計畫 成果報告
開關式磁阻馬達之設計、驅動、控制改善及前瞻技術開發- -子計畫二:開關式磁阻馬達在洗衣機的應用及其無轉軸驅
動器之研發(2/2) 研究成果報告(完整版)
計 畫 類 別 : 整合型
計 畫 編 號 : NSC 95-2221-E-011-189-
執 行 期 間 : 95 年 08 月 01 日至 96 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學電機工程系
計 畫 主 持 人 : 劉添華
計畫參與人員: 博士班研究生-兼任助理:林正凱
碩士班研究生-兼任助理:盧昶宇、蕭教成
報 告 附 件 : 國外研究心得報告
出席國際會議研究心得報告及發表論文
處 理 方 式 : 本計畫涉及專利或其他智慧財產權,2 年後可公開查詢
中 華 民 國 96 年 06 月 12 日
行政院國家科學委員會補助專題研究計畫 ■ 成 果 報 告
□期中進度報告
開關式磁阻馬達之設計、驅動、控制改善及前瞻技術開發-子計畫二:
開關式磁阻馬達在洗衣機的應用及其無轉軸驅動器之研發(2/2)
計畫類別:□ 個別型計畫 ■整合型計畫 計畫編號:NSC 95-2221-E-011-189-
執行期間:95 年 08 月 01 日至 96 年 07 月 31 日
計畫主持人:劉添華 共同主持人:
計畫參與人員:盧昶宇、蕭教成、林正凱
成果報告類型(依經費核定清單規定繳交):□精簡報告 ■完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
■出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、列 管計畫及下列情形者外,得立即公開查詢
■涉及專利或其他智慧財產權,□一年■二年後可公開查詢
執行單位:國立台灣科技大學電機工程系
中 華 民 國 96 年 7 月
中文摘要
本計畫旨在探討高功因無轉軸偵測元件之開關式磁阻電動機驅動 系統的研製,並實際應用在洗衣機。計畫中首先介紹開關式磁阻電動機 之結構、原理及數學模式,其次說明無轉軸偵測元件系統驅動方法。最 後,於電源側加入功率因數校正電路,以提升開關磁阻電動機運轉時輸 入側的功率因數。實驗結果說明電源側的功率因數確實有效提升,此 外,計畫中亦針對單相開路時的改善策略加以探討,以提高系統可靠度。
本計畫將開關式磁阻電動機應用在洗衣機驅動系統,並以數位信號 處理器 TMS320LF2407A 晶片為系統核心發展軟體,由無轉軸角度估測 方法計算轉軸角度及速度,完成閉迴路控速,實測結果驗證本計畫所提 出的方法確實可行。
關鍵詞:開關式磁阻電動機、無轉軸偵測元件系統估測角度、功率因 數校正、洗衣機驅動系統、數位信號處理器。
英文摘要
This project proposes the development of a high power factor sensorless switched reluctance motor drive system and its application in the washing machine. First, the structure, basic principle and mathematical model of the switched reluctance motor are introduced. Then, the sensorless method of the drive system is discussed. Finally, a power factor correction circuit is used to improve the power factor of the input source. Experimental results show that the proposed method can improve the power factor of the ac input source. In addition, the reliability improvement of a single-phase opened is also discussed.
This project proposes the switched reluctance motor applying in a washing machine system. A digital signal processor, TMS320LF2407A, is used as the system core. The software is developed as well. Based on the proposed sensorless technique, a closed-loop adjustable speed system can be achieved. The experimental results can validate that the proposed method.
Keywords: switched reluctance motor, sensorless, power factor correction, washing machine drive system, digital signal processor.
目錄
中文摘要... I 英文摘要...II 目錄...III 圖目錄...V 表目錄...VIII
第一章 緒論...1
1.1 研究動機...1
1.2 目的...2
1.3 大綱...3
第二章 開關式磁阻電動機基本原理及驅動系統 ...4
2.1 簡介...4
2.2 結構...4
2.3 數學模式...5
2.4 驅動原理...8
2.5 功率轉換器...11
第三章 無轉軸偵測元件驅動系統 ...15
3.1 簡介...15
3.2 轉軸角/速度估測方法 ...15
3.2.1 電動機自感估測...16
3.2.2 啟動方法...18
3.2.3 閉迴路系統...19
第四章 功因校正電路介紹 ...20
4.1 簡介...20
4.2 功因校正原理...21
4.2.1 功因校正電路架構...21
4.2.2 控制方法...22
第五章 系統研製 ...28
5.1 簡介...28
5.2 洗衣機簡介...29
5.2.1 洗衣機結構...30
5.2.2 開關式磁阻電動機驅動洗衣機系統簡介 ...31
5.3 硬體電路製作...31
5.3.1 功率轉換器電路...31
5.3.2 回授及偵測電路...33
5.3.3 電源側功因校正電路設計...35
5.3.4 功率級電路相關元件設計...38
5.3.5 控制電路設計...42
5.4 數位信號處理器架構...44
5.5 軟體程式設計...46
5.5.1 主程式...46
5.5.2 中斷服務程式...46
第六章 實測結果 ...49
6.1 簡介...49
6.2 實測結果...50
第七章 結論與建議 ...75
第八章 計畫成果及自評 ...76
參考文獻...77
圖目錄
圖 2.1 三相開關式磁阻電動機。 ...5
圖 2.2 開關式磁阻電動機動作原理示意圖: (a) a 相於非對正位置;(b) a 相於對正位置。 ...9
圖 2.3 理想的開關式磁阻電動機相關波形: (a)自感;(b)正轉時電流命令;(c)產生的正轉矩。...10
圖 2.4 非對稱半橋型轉換器電路圖。 ...11
圖 2.5 開關式磁阻電動機單相開關元件之操作模式: (a)模式 A;(b)模式 B;(c)模式 C 之 1;(d)模式 C 之 2。 ...14
圖 3.1 無轉軸偵測元件閉迴路驅動系統方塊圖。 ...19
圖 4.1 升壓型功因校正電路。 ...21
圖 4.2 升壓型功因校正電路動作原理:(a)模式 1;(b)模式 2。 ...21
圖 4.3 功因校正電路波形: (a)開關電流;(b)二極體電流; (c)電感電流;(d)開關控制信號。 ...22
圖 4.4 升壓型乘法器功因校正電路 ...24
圖 4.5 平均電流控制法:(a)電路;(b)電流波形。 ...25
圖 4.6 功因校正內部電路(UC3854N) ...26
圖 5.1 無轉軸偵測元件之開關式磁阻電動機閉迴路控速系統 實體圖。 ...28
圖 5.2 功因校正電路系統實體圖。 ...29
圖 5.3 功因校正電路系統方塊圖。 ...29
圖 5.4 美泰克 MAH5500 滾筒式洗衣機實體圖。...30
圖 5.5 洗衣機後視結構圖。 ...30
圖 5.6 非對稱半橋型功率轉換器單相電路示意圖。 ...32
圖 5.7 霍爾電流偵測元件電流偵測示意圖。 ...34
圖 5.8 類比/數位轉換電路圖。 ...34
圖 5.10 UC3854N 電路圖。 ...36
圖 5.11 輸出電壓設計示意圖。 ...43
圖 5.12 限流電路設計示意圖。 ...44
圖 5.13 eZdsp2407A 系統架構圖[38]。 ...45
圖 5.14 主程式流程圖。 ...46
圖 5.15 速度中斷服務程式流程圖。 ...47
圖 5.16 電流中斷服務程式流程圖。 ...48
圖 6.1 功因校正電路閘極驅動信號。 ...53
圖 6.2 加入功因校正電路,1/5 倍額定負載下電源側輸入波形: (a)電壓;(b)電流。 ...54
圖 6.3 加入功因校正電路,額定負載下電源側輸入波形: (a)電壓;(b)電流。 ...55
圖 6.4 加入功因校正電路,不同負載下功因及效率實測圖: (a)功因;(b)效率。 ...56
圖 6.5 未加入功因校正電路,無轉軸偵測元件,轉速命令 150 rpm 下, 電源側輸入波形:(a)電壓;(b)電流。...57
圖 6.6 未加入功因校正電路,無轉軸偵測元件,轉速命令 500 rpm 下電源側輸入波形:(a)電壓;(b)電流。...58
圖 6.7 加入功因校正電路,無轉軸偵測元件,轉速命令 150 rpm 下電源側輸入波形:(a)電壓;(b)電流。...59
圖 6.8 加入功因校正電路,無轉軸偵測元件,轉速命令 500 rpm 下電源側輸入波形:(a)電壓;(b)電流。...60
圖 6.9 具編碼器,洗衣機驅動系統在轉速 30 rpm 暫態響應。...61
圖 6.10 具編碼器,洗衣機驅動系統在轉速 500 rpm 暫態響應。...61
圖 6.11 具編碼器,洗衣機驅動系統在轉速 3000 rpm 暫態響應。...62
圖 6.12 具編碼器,洗衣機驅動系統在正反轉 500 rpm 暫態 響應圖。 ...62
圖 6.13 具編碼器,洗衣機驅動系統在轉速 500 rpm 下,於 2 秒 時 B 相開路實測圖:(a)轉速暫態響應圖。(b)電流。 ...63
圖 6.14 具編碼器,洗衣機驅動系統在轉速 800 rpm 下,於 3 秒
時 B 相開路實測圖:(a)轉速暫態響應圖。(b)電流。 ...64
圖 6.15 具編碼器,洗衣機驅動系統在轉速 500 rpm 下, 瞬間加載 3 公斤衣物暫態響應實測圖。 ...65
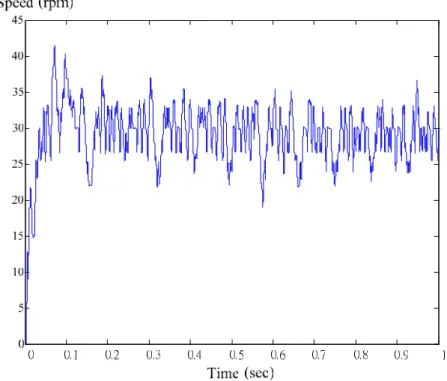
圖 6.16 典型洗衣機轉速實測圖。 ...65
圖 6.17 無轉軸偵測元件,轉速 150 rpm 暫態響應圖。...66
圖 6.18 無轉軸偵測元件,轉速 500 rpm 暫態響應圖。...66
圖 6.19 無轉軸偵測元件,轉速 1200 rpm 暫態響應圖。...67
圖 6.20 無轉軸偵測元件,轉速命令 500 rpm 下, 瞬間加載 1.5 公斤衣物暫態響應圖。 ...67
圖 6.21 無轉軸偵測元件,轉速命令 500 rpm,換相角度信號 與估測誤差關係圖: (a)電流波形;(b)換相信號; (c)轉軸角度估測誤差。 ...68
圖 6.22 無轉軸偵測元件,轉速-150 rpm 暫態響應圖。 ...68
圖 6.23 無轉軸偵測元件,轉速-500rpm 暫態響應圖。 ...69
圖 6.24 無轉軸偵測元件,轉速-500rpm 暫態響應圖。 ...69
圖 6.25 無轉軸偵測元件,轉速命令 150 rpm, a 相實測電壓 及電流波形:(a)電壓波形;(b)電流波形。 ...70
圖 6.26 無轉軸偵測元件,轉速命令 500 rpm, a 相實測電壓 及電流波形:(a)電壓波形;(b)電流波形。 ...71
圖 6.27 無轉軸偵測元件,轉速命令 1200 rpm, a 相實測電壓 及電流波形:(a)電壓波形;(b)電流波形。 ...72
圖 6.28 無轉軸偵測元件,轉速命令 150 rpm,輸入側電壓波形。..73
圖 6.29 無轉軸偵測元件,轉速命令 500 rpm,輸入側電壓波形。..73 圖 6.30 無轉軸偵測元件,轉速命令 1200 rpm,輸入側電壓波形。74
表目錄
表 2.1 功率轉換器單相電壓切換模式 ...12
表 5.1 洗衣機用開關式磁阻電動機規格表 ...31
表 5.2 Power MOSFET - IRF644 規格表...33
表 5.3 功率元件開關(SPW47N60C3)規格表...41
表 5.4 TMS320LF2407A 數位信號處理器規格表 ...45
第一章 緒論
1.1 研究動機
在環保意識高漲與石油逐漸短缺的今日,電動機成為利用電能的最 佳動力。目前電動機可概分為直流電動機及交流電動機兩種。直流電動 機因具有線性模式,控制器設計較容易,在 1980 年以前,被大量應用 在自動化工業中。直流電動機具有碳刷及換向片,而碳刷及換向片間的 機械接觸,易產生火花,因此不適合用於易爆場所。此外,碳刷有壽命 限制,需要定期更換維護,使得直流電動機的發展受到限制,而在工業 的應用上逐漸被交流電動機所取代[1]。
交流電動機具有結構堅固、製造容易、轉動慣量小以及壽命長的優 點,近年來隨著電力電子元件、微處理器以及控制技術的快速進步,使 得交流電動機驅動系統已成為工業應用中驅動器的主流。交流電動機包 括感應電動機、永磁式同步電動機及磁阻電動機等三大類[2]。其中感 應電動機成本較低,具有定子銅損、轉子銅損及鐵損,效率較低,散熱 亦較困難。此外,感應電動機具有滑差的問題,導致磁軸估測不易,只 能仰賴轉子的電阻及電感值進行估測,轉子電阻及電感易受溫度影響,
造成滑差估測的困難[3]。永磁式電動機其轉子為永久磁鐵,無轉子銅 損故效率較高,轉子的旋轉速度與定子的旋轉磁場同步,無滑差的問 題。然而,永磁式同步電動機需要磁性材料,良好的磁性材料產量稀少,
價格昂貴,故永磁式同步電動機造價昂貴,通常應用在高精度、高性能 的產品[4]。磁阻電動機,沒有滑差問題,轉子不需磁性材料,具有成 本低廉及結構堅固的特色。但磁阻電動機因為結構關係,易產生較大的
精度要求不高的場合[5]。近年來隨著電力電子、功率半導體、微處理 器及控制技術的快速發展[6]-[7],使得開關式磁阻電動機的設計與控制 引起學界與業界的重視。本計畫將針對開關式磁阻電動機的洗衣機驅動 系統,完成無轉軸偵測元件的方法,並達到閉迴路的驅動系統。
另ㄧ方面,隨著大功率電力電子設備使用率增加,導致功率因數與 諧波問題日益嚴重,其中,功率因數低落造成用電器具利用率下降,而 諧波太大則會導致電力品質下降。目前已有許多國際法規針對各類電子 電機產品電源側功率因數及所產生的諧波加以嚴格規範,以期提高輸入 側之電力品質。為了滿足這些需求,計畫中採用德州儀器(TI)之積體電 路(IC UC3854N),設計一價格低廉、電路簡單的功因校正電路,使得電 源側能達到改善功因及抑制諧波的目的。
1.2 目的
本計畫主要探討具高功因開關式磁阻電動機之無轉軸偵測元件洗 衣機驅動系統。計畫中提出一種簡單的轉軸角度估測方法,預先量測定 子自感、激磁電流與角度位置關係的自感曲線,藉由量測激磁相電流,
得到電流斜率,進而估測定子自感值,進一步根據自感曲線的參數,估 測出轉軸角度位置。在功率因數改善方面,提出一價格低廉、電路簡單 之功因校正電路,使其達到功因改善及諧波抑制的目的。本計畫所提出 的轉軸角度估測法則,不需要複雜的電路設計和程式運算,改善了傳統 估測法則可能帶來的負轉矩輸出、電路複雜及精確度低的缺點。此外,
本計畫成功地將所提的轉軸角度估測方法應用在洗衣機,並完成洗衣機 閉迴路系統的研製。為了實際驗證所提方法的可行性,計畫中將所提方 法實際在洗衣機進行測試,與過去傳統的單相感應電動機驅動式洗衣機
比較,本計畫所提的洗衣機系統具有扭力大、可靠度高等優點[6]-[8]。
就筆者所知,此為首次將具高功因無轉軸偵測元件開關式磁阻電動機應 用在洗衣機的研究,相關的研究成果,可供相關人員的參考。
1.3 大綱
本計畫共分七章:第一章為緒論,第二章針對開關式磁阻電動機的 結構、數學模式、驅動原理及驅動系統來做介紹。第三章探討無轉軸偵 測元件驅動系統,主要說明本文所提出之轉軸角度估測方法、原理及實 作方法,並完成無轉軸偵測元件閉迴路控制系統。第四章為電源側功因 改善,介紹功因校正原理及電路架構。第五章為系統研製,包含洗衣機 簡介、功率轉換器、回授及偵測電路、功因校正電路、數位信號處理器 簡介與軟體程式設計。第六章為實測結果。第七章對本計畫做一總結,
並提出未來研究方向。最後附上相關參考文獻。
第二章 開關式磁阻電動機基本原理 及驅動系統
2.1 簡介
開關式磁阻電動機的定子採用集中式繞組,轉子由矽鋼片堆疊而 成,故結構簡單、堅固及成本低廉,定子與轉子均為凸極式,亦即為雙 凸極(double salient pole)結構。開關式磁阻電動機是利用其轉子具有傾 向定子繞組以便產生最大電感的方向移動[8],亦即電動機轉子與定子 間朝向最小磁阻路徑運動,因此其轉矩與定子激磁電流的正負極性無 關。功率轉換器可使用單極性。且因其功率轉換器的結構特殊,無上、
下臂短路之虞,故可靠度較高。另一方面,由於此電動機具有高度非線 性轉矩特性,且有較大的脈動轉矩,噪音亦大,使得開關式磁阻電動機 較不適合使用在高精度的伺服系統。本章將就其結構特性、數學模式、
驅動原理及功率轉換器加以說明。
2.2 結構
三相開關式磁阻電動機,其結構如圖 2.1 所示,三相開關式磁阻電 動機在結構設計上須使定子與轉子具有不同的極數,以防止當定子與轉 子凸極對準時,發生電動機無法轉動之情形,一般三相開關式磁阻電動 機以 6/4、6/8、12/8 極的組合居多,本計畫即採用三相 12/8 極開關式 磁阻電動機。
圖 2.1 三相開關式磁阻電動機。
2.3 數學模式
開關式磁阻電動機一般採用分相激磁方式,亦即同一時間內,僅有 一相激磁,所以每相的基本電壓方程式可表示為:
a
a a
v Ri d dt
= + λ (2.1)
b
b b
v Ri d dt
= + λ (2.2)
c
c c
v Ri d dt
= + λ (2.3)
式中
va、vb、vc :a、b、c 相定子線圈繞組之相電壓 ia、ib、ic :a、b、c 相定子線圈繞組之相電流 λa、λb、λc :a、b、c 相定子線圈繞組之磁通鏈 R :定子線圈繞組之電阻
d :微分運算子
t :時間
本計畫所採用的激磁方式為單相激磁,同一時間只有一相有磁通,故 磁通鏈可表示如下:
a L ia a
λ = (2.4)
b L ib b
λ = (2.5)
c L ic c
λ = (2.6)
式中
La、Lb、Lc :a、b、c 相定子線圈繞組之自感
將(2.4)~(2.6)式代入(2.1)~(2.3)式中可得:
a a
a a
v Ri dL i
= + dt (2.7)
b b
b b
v Ri dL i
= + dt (2.8)
c c
c c
v Ri dL i
= + dt (2.9)
再將(2.7)~(2.9)式重新整理,可得:
a a e
a a a a
e
di dL d
v Ri L i
dt d dt
θ
= + + θ (2.10)
b b e
b b b b
e
di dL d
v Ri L i
dt d dt
θ
= + + θ (2.11)
c c e
c c c c
e
di dL d
v Ri L i
dt d dt
θ
= + + θ (2.12)
令 e d e dt
ω = θ 代入(2.10)~(2.12)式整理後,可得到電流方程式如下:
1 ( )
a a
a a a e
a e
di dL
v Ri i
dt L d ω
= − − θ (2.13)
1 ( )
b b
b b b e
b e
di dL
v Ri i
dt L d ω
= − − θ (2.14)
1 ( )
c c
c c c e
c e
di dL
v Ri i
dt L d ω
= − − θ (2.15)
式中
θe :轉子電機角度 ωe :轉子電機角速度
(2.13)~(2.15)式即為開關式磁阻電動機的電流方程式。
因此,開關式磁阻電動機每一相線圈所產生的轉矩可表示為[8]:
1 2
e 2 r
e
T N i dL dθ
= (2.16)
式中
Te :電機轉矩 Nr :轉子極數
本計畫所探討的開關式磁阻電動機具有 a、b、c 三相定子繞組,
則三相合成的轉矩如下:
2 2 2
1 1 1
2 2 2
a b c
e r a r b r c
e e e
dL dL dL
T N i N i N i
dθ dθ dθ
= + + (2.17)
轉速動態方程式可表示為:
1( )
r
e L r
d T T B
dt J
ω = − − ω (2.18)
式中
J :電動機轉動慣量 TL :電動機外加負載 B :電動機摩擦係數
由於同一時間只有一相被激磁,且依序激磁,故定子每相繞組激磁時 位移的機械角度可表示如下:
360 mNr
φ = D (2.19)
式中
φ :每相繞組激磁位移的機械角度
m :定子相數
本計畫中所使用的開關式磁阻電動機為三相繞組,轉子極數為 8 極,每 相導通時轉軸角度將移動 15 度的機械角。
2.4 驅動原理
開關式磁阻電動機的轉動原理可由圖 2.2(a)及圖 2.2(b)來說明,當 一相定子繞組被激磁時,轉子將朝向最小磁阻路徑的方向移動而產生轉 矩。以三相電動機為例,如圖 2.2(a),當定子的 A 繞組被激磁,編號 1 號的轉子凸極會往順時針方向移動,亦即朝向磁阻減少的路徑移動,一 直到達磁阻最小的地方,此時編號 1 號的轉子凸極與 A 相定子繞組凸 極的位置對正(aligned position),如圖 2.2(b)所示。同理,若再對定子的 B 相繞組激磁,則轉子將再產生順時針方向的轉矩,如此分別對 A、B、
C 三相繞組依序激磁,將得到順時針方向上的連續轉矩,電動機便可以 持續正轉。
由上述的驅動原理得知要使開關式磁阻電動機持續旋轉,必須配合 轉軸的角度適時的對定子繞組激磁。當開關式磁阻電動機之轉子凸極和 定子凸極完全分開時,磁阻最大,此時定子繞組自感為最小。反之,當 轉子凸極逐漸靠近定子凸極時,定子繞組自感將逐漸增加,直到轉子凸 極完全對正定子凸極,此時定子繞組之自感達到最大值,若轉子繼續旋 轉,則自感值將由最大值漸漸減少至最小值而呈週期性變化。
本計畫採用的開關式磁阻電動機定子部分為三相繞組,為了說明上 的方便,以下將忽略磁飽和效應,並以梯形波表示其理想化的自感對電 機角關係圖。此時三相自感間具有相差 120 度的電機角,且三相自感波 形相同,如圖 2.3(a)所示。依據轉矩方程式(2.16)式可知,若欲產生正轉 矩則需在自感上升期間注入激磁電流。因此,依照圖 2.3(b)的方式依序 對定子各相繞組注入激磁電流時,可得到平滑的輸出正轉矩,如圖 2.3(c) 所示。
A
A C
B
A
C B
A B
C
C B
1
1 2
1
2
1 2 2
Stator
Rotor
A
A C
B
A
C B
A B
C
C B
Rotor 1
1 2
1
2
1 2 2 Stator
(a) (b) 圖 2.2 開關式磁阻電動機動作原理示意圖:
(a) a 相於非對正位置;(b) a 相於對正位置。
定子自感
La Lb Lc La Lb
Lc
θe
(a)
定子電流
ic
ia ib ia ib ic
θe
(b)
轉矩
Tc
Ta Tb Ta Tb Tc
θe
(c)
圖 2.3 理想的開關式磁阻電動機相關波形:
(a)自感;(b)正轉時電流命令;(c)產生的正轉矩。
2.5 功率轉換器
開關式磁阻電動機的轉矩與電流的平方及自感值對角度的變化率 成正比,與電流的方向無關,只需配合轉軸角度適當地控制單極性電 流,即可達成正負轉矩控制的要求,故其功率轉換器為單極性的電路架 構。一般開關式磁阻電動機的功率轉換器架構,需根據電動機的結構、
相數及電流調制的需求來設計[9]。本計畫採用之功率轉換器為非對稱 半橋型轉換器(asymmetric half-bridge converter),如圖 2.4 所示,此種電 路為開關式磁阻電動機最基本的功率轉換器架構,每相線圈繞組需使用 兩個功率開關元件及兩個飛輪二極體連接至直流電壓源,可於每相線圈 繞組上產生正、負及零三種不同電壓,而且每相皆可獨立控制,上、下 臂可同時切換,得到最佳激磁電流驅動能力,亦可用於截波控制模式,
將一開關維持導通,用另一開關做切換,利用飛輪二極體,減少激磁電 流的下降率,同時降低切換頻率及切換損失,該電路不僅適合於波寬調 變或單脈波切換運轉,亦能配合所提的無轉軸角度估測方法,提供估測 角度時所需每相繞組上的三種不同的電壓切換模式,如表 2.1 所示。
+
- Vdc C
1
Dc
2
Dc 1
Sc
2
Sc
c
1
Da
2
Da 1
Sa
2
Sa
a
1
Db
2
Db 1
Sb
2
Sb
b
圖 2.4 非對稱半橋型轉換器電路圖。
表 2.1 功率轉換器單相電壓切換模式
開關及二極體狀態 切換模式
S1 S2 D1 D2
繞組電壓
模式 A ON ON OFF OFF Vd c
模式 B OFF OFF ON ON −Vd c
ON OFF OFF ON 模式 C
OFF ON ON OFF 0
為了說明方便,僅考慮電動機的其中一相繞組時,相電壓可表示為:
( ) ( ) d ( ( ) ( )) v t i t R L t i t
= +dt
( ) ( )
( ) ( ) ( ) e
e
di t dL t i t R L t i t
dt d ω
= + + θ (2.20)
模式 A
開關 S1 和 S2 同時導通,此時直流電源電壓直接對電動機的定子 繞組充電,定子電流i t( )快速增加,如圖 2.5(a)所示,此時電動機的相 電壓v t( )等於電源電壓Vdc,可得到下式:
dc e
e
di dL
V iR L i
dt d ω
= + + θ (2.21)
整理(2.21)式可得
1( dc e)
e
di dL
V iR i
dt L d ω
= − − θ (2.22)
模式 B
開關 S1 和 S2 同時截止,定子電流i t( )經由飛輪二極體 D1 及 D2 對電源放電,對電源電壓放電即為電動機的相電壓v t( )等於−Vdc。此時 定子電流i t( )快速減少,如圖 2.5(b)所示。
dc e
e
di dL
V iR L i
dt d ω
− = + + θ (2.23)
整理(3.4)式可得
1( dc e)
e
di dL
V iR i
dt L d ω
= − − − θ (2.24)
模式 C
開關 S1 導通、S2 截止或開關 S1 截止、S2 導通,此時定子電流 ( )
i t 經由二極體 D1 或 D2 放電,此時定子電流i t( )緩慢減少,即電動機 的相電壓v t( )等於 0,如圖 2.5(c)(d)所示。
0 e
e
di dL
iR L i
dt d ω
= + + θ (2.25)
整理(2.25)式可得
1( e)
e
di dL
dt L iR id ω
= − + θ (2.26)
(a) (b)
(c) (d)
圖 2.5 開關式磁阻電動機單相開關元件之操作模式:
(a)模式 A;(b)模式 B;(c)模式 C 之 1;(d)模式 C 之 2。
第三章 無轉軸偵測元件驅動系統
3.1 簡介
開關式磁阻電動機的控制必須仰賴轉軸角/速度回授,以決定定子 電流加入的時機與大小,達成換相及閉迴路控速系統。因此,通常使用 轉軸角度偵測元件作為電動機的轉軸角度回授,進而計算出轉軸速度。
一般使用光遮斷器,配合一個裝在轉軸上的開槽碟片。亦可使用編碼器 (encoder)或分解器(resolver)檢知轉軸角度。然而,這些額外的裝置,不 僅容易受外界雜訊干擾而降低其可靠度,且增加系統成本及佔空間,因 此,本計畫提出一轉軸角度估測方法用以降低系統空間及成本。所提的 方法係利用激磁相的電流斜率進行自感的估測,進而估測轉軸角度,最 後探討所提轉軸角度估測誤差的說明。
3.2 轉軸角/速度估測方法
本計畫所使用的轉軸角度估測法是先從電流斜率估測自感後,再利 用自感對電流及角度的關係計算出轉軸角度[10]。由第二章的介紹可以 得知圖 2.4 的非對稱半橋型功率轉換器,能提供三種電壓切換模式,如 表 2.1 所示。這三種電壓切換模式,可產生三種不同的激磁電流斜率,
若根據兩種不同的電流斜率配對轉換器又可分為模式 1 及模式 2 兩種不 同的估測模式。模式 1 由模式 A 配合模式 C 或模式 B 配合模式 C 的激 磁電流斜率估測自感;模式 2 由模式 A 配合模式 B 的激磁電流斜率估 測自感。其相關的分析如下。
3.2.1 電動機自感估測
首先根據第二章介紹的開關式磁阻電動機的相電壓(2.20)式,可以推 導出電動機的激磁電流斜率為:
1( e)
e
di dL
v iR i
dt L d ω
= − − θ (3.1)
轉換器操作在模式 1 和模式 2 的分析,分別如下:
(1)模式 1 時電動機的自感估測
當轉換器的操作模式為模式 1,電動機的相電壓共有Vdc、−Vdc和 0 三種數值。當轉換器切換於模式 C 狀態,此時電動機的相電壓v=0, 代入(3.1)式,可得模式 C 狀態的電流斜率為:
mod
1( e)
eC e
di dL
dt L iR id ω
= − − θ (3.2)
式中
mod eC
di
dt :切換狀態模式 C 下的電流斜率
同理,當轉換器切換於模式 A 狀態,此時電動機的相電壓v=Vdc,代 入(3.1)式可得模式 A 狀態的電流斜率為:
mod
1( dc e)
eA e
di dL
V iR i
dt L d ω
= − − θ (3.3)
式中
mod eA
di
dt :切換狀態模式 A 下的電流斜率
事實上(3.2)及(3.3)式中的瞬間電流i和反電勢 e
e
i dL d ω
θ 並不完全相同。
然而,當微處理器的取樣週期很短時,其電流及反電勢的平均值幾乎 相同,故可假設其反電勢和電阻壓降相同。此時可由(3.2)和(3.3)式推 導出電動機的自感估測值為:
mod mod
( )
dc
eA eC
di di
L V
dt dt
= − (3.4)
由(3.4)式自感估測關係式,可知電動機自感僅和繞組相電壓、切換 狀態模式 A 的電流斜率和切換狀態模式 C 的電流斜率有關。
同理,當轉換器切換於模式 B 的狀態,電動機的相電壓v= −Vdc, 代入(3.1)式,可得到模式 B 狀態的電流斜率為:
mod
1( dc e)
eB e
di dL
V iR i
dt L d ω
= − − − θ (3.5)
式中
mod eB
di
dt :切換狀態模式 B 下的電流斜率 由(3.2)和(3.5)式亦可推得電動機的自感估測值為:
mod mod
( )
dc
eB eC
di di
L V
dt dt
= − − (3.6)
(2)模式 2 時電動機自感估測
在模式 2 中,轉換器操作於模式 A 和模式 B 兩種切換狀態,故電 動機的相電壓只有Vdc和−Vdc兩種數值。和模式 1 近似的推導理論,由(3.3) 和(3.5)式,可得到自感的估測值為:
mod mod
2 dc ( )
eA eB
di di
L V
dt dt
= −
mod mod
2 dc ( )
eB eA
di di
V dt dt
= − − (3.7)
由(3.4)、(3.6)、(3.7)式的自感估測方法,可知本計畫的方法僅需回 授相電壓和電流斜率的變化兩個參數值,即可估測定子自感,進而得知 電動機轉軸/角速度,不論在硬體或軟體設計上均簡單許多。
3.2.2 啟動方法
開關式磁阻電動機的無轉軸偵測元件驅動系統中,電動機於靜止狀 態中很難估測其轉軸角度,所以電動機的靜止啟動策略是必要的。本計 畫提出一簡單的電動機自行啟動的方式,由數位信號處理器同時對電動 機的三相繞組送出一方波電流命令,判定靜止狀態時電動機的啟動激磁 相位,此電流偵測命令值大小為 0.5 安培且持續時間約 0.3 毫秒,由於 電流偵測命令值小且激磁時間短,電動機所產生的轉矩很小,故不會影 響電動機靜止狀態下的初始位置。由於開關式磁阻電動機在不同的初值 角度下,其各相的自感值均不盡相同。因此,由各相電流斜率的變化值,
仍然可以從(3.4)、(3.6)及(3.7)式估測到此時電動機各相的自感值,配合 圖 2.3(a)電動機各相自感關係圖可找到一些啟動的判斷技巧。以 A 相自 感為例,當電動機的三相自感值中最低的相為 B 相時,其前面一相為 A 相,此時 A 相轉子處於非對正的位置,即定子自感斜率為正值,所以 將電動機的啟動相位設定為 A 相,並對 A 相繞組激磁,電動機輸出正 轉矩產生正轉。同理,若自感最低的相為 C 相,電動機的啟動相位設 定為 B 相;若自感最低的相為 A 相,電動機的啟動相位設定為 C 相。
此外,若電動機要反轉啟動,則以三相自感值中最低相位的後面一 相設定為啟動相位。依據上述的方法判斷出電動機的啟動相位後,對適 當的繞組激磁,電動機即可順利用正/反轉啟動。
3.2.3 閉迴路系統
無轉軸角度偵測元件閉迴路驅動控速系統,如圖 3.1 所示。由霍爾 電流偵測元件偵測電動機三相電流信號ia、ib及ic,類比電流信號透過 類比/數位轉換器轉換成數位信號回授至數位信號處理器,將回授的電 流信號透過轉軸角度估測器估算出轉軸角度θr,轉軸角度θr再經過差分 運算得到電動機轉速ωr,將設定的轉速命令ωr*與估測得到的轉速ωr相 減得到轉速誤差∆ωr,然後經由速度控制器運算得到電動機所需的電流 命令i*。另外,電流命令i*配合估測的角度θr,計算出各相電流命令ia*、
*
ib 及ic*,再與回授的電動機三相電流信號ia、ib及ic一起送入電流磁滯 控制器,產生電動機的三相開關觸發信號。最後,將開關信號送至功率 轉換器並驅動電動機,完成無轉軸角度偵測元件的開關式磁阻電動機閉 迴路驅動系統。
ωr
*
ωr ∆ωr i*
θr
θr
ia
ia
ia
ib
ib
ib
ic
ic
ic
*
ic
*
ia
*
ib
Ta
Tb
TcTc'
'
Tb '
Ta
第四章 功因校正電路介紹
4.1 簡介
傳統交/直流電源轉換器,係利用橋式整流與濾波電路來達到輸出 為平穩直流之目的。此架構雖然簡單,但其由二極體自然換流的特性,
將導致電源側輸入電流發生畸變,無法維持正弦波的形式,使得輸入側 功率因數偏低,並含有極大的諧波,這些諧波將導致輸入端的電源污 染,使電力品質下降。在環保意識高漲的今日,各國陸續修定各項能源 法規,來規範電源輸入端的諧波含量,希望藉以降低電源污染以提高電 力品質,此也迫使許多專家學者,積極投入這方面的研究。
功因校正電路共分為被動式和主動式兩大類。被動式功因校正是直 接加入電感、電容等被動元件,藉以補償輸入端電流與電壓間之相位差 以提高功率因數,但目前市電僅有 50Hz 或 60Hz,此將造成電感及電 容體積過於龐大,無法達到電路輕、薄、短、小的要求,因此,被動式 功因校正較少應用於商用電力產品中。而主動式功因校正是利用控制器 與切換開關等元件,迫使輸入電流能與輸入電壓同相,達到功率因數趨 近於1的目的,且由於其為高頻切換,故可使輸入電感及濾波電容的體 積較小,並於輸入電壓變化時亦可達到功因校正功能,目前,此類電路 已廣泛應用於各種電力產品中。本章中將介紹主動式功因校正電路的基 本原理與控制方法,並探討以一功因修正電路來改善洗衣機驅動系統電 源側的功率因數。
4.2 功因校正原理
4.2.1 功因校正電路架構
主動式功因校正電路是置於整流器與負載之間,並操作在高頻切換 技術使輸入電壓與電流為同相位。為了達到此目的,必須偵測輸入電壓 再控制開關的導通或截止,使得輸入電流波形追隨輸入電壓波形。目前 最常使用的主動功因校正電路為升壓型電路,因其電感電流即為輸入電 流,較易控制。圖 4.1 即為升壓型功因校正電路架構,其操作原理如圖 4.2 所示。
圖 4.1 升壓型功因校正電路。
VL
iL iD
1
VS
(a)
VL
iL io
(b)
圖 4.2 升壓型功因校正電路動作原理:(a)模式 1;(b)模式 2。
模式 1:如圖 4.2(a)所示,開關 S1 導通,此時電感上的跨壓為Vin, 電感電流呈線性增加。
模式 2:如圖 4.2(b)所示,當開關 S1 截止後,電感電流為了保持連 續,其會通過二極體流至負載端,此時電感上兩端的跨壓為Vin與Vo之 差值,電感電流逐漸下降。
升壓型功因校正電路其電路動作的電流波形如圖 4.3 所示。當 S1 導通時,iS1為 S1 上所流過的電流,而當 S1 截止時,此時儲存在電感 L 內的磁能,經二極體釋放形成電流iD,當電感內的能量釋放完後,iD亦 降為零,由此可見只要開關 S1 的切換機制追隨輸入電壓波形,那麼電 感電流便會追隨輸入電壓波形,而達到功因校正的目的。
圖 4.3 功因校正電路波形:
(a)開關電流;(b)二極體電流;(c)電感電流;(d)開關控制信號。
4.2.2 控制方法
升壓型功因校正電路,其電感上的電流即為輸入電流。在電路控制 上可分為非連續導通模式(discontinuous conduction mode;簡稱 DCM) 與連續導通模式(continuous conduction mode;簡稱 CCM)二種。非連續
導通模式由於每個切換週期內電感上電流都會降至零,所以開關在每次 導通前都是在零電流的狀態,較易達成柔性切換,切換損失較小,對於 二極體逆向回復時間的需求較不嚴苛,但由於其峰值電流過大,使得開 關上流過的電流脈動量甚大,因此一般非連續導通模式較適合應用於小 功率的場合。此外,非連續導通模式通常不需要複雜的回授及控制,故 硬體電路較為簡單。
連續導通模式,由於輸入電流為連續,所以電磁干擾較不明顯,所 需的濾波器也較小,另一方面,其平均電流與峰值電流差距不大,對於 切換開關的電流應力需求較小,故適合用於大功率的場合,但是由於電 流為連續,所以無法直接應用於零電流切換,而且對於二極體逆向回復 時間的需求較為嚴格。此外,連續導通模式一般均需要回授電容的電壓 及電感的電流,以進行回授控制。
升壓型功因校正方法依電感電流操作模式分為乘法器控制法 (multiplier control approach)及電壓隨耦法(voltage follower approach),前 者為電感電流操作在連續導通模式,後者則為非連續導通模式。乘法器 控制法如圖 4.4 所示,此種方法的特性在於需要乘法器來達到控制的目 的,一般將整個控制系統分成內迴路與外迴路兩個部分:內迴路為電流 控制用來作為功因校正;而外迴路為電壓控制則用來穩定輸出電壓。藉 由乘法器將輸入電壓及控制電壓訊號相乘,作為輸入電流欲追隨的訊 號。本計畫在電感電流操作模式中即利用乘法器控制法,且在電流控制 方面採用平均電流控制法,平均電流控制法說明如下:
vin
iin
in in
k v
vvea
vref
vFB
vmo
Vo Io
C RL
圖 4.4 升壓型乘法器功因校正電路
平均電流控制法主要是操作在定頻控制模式下。電路與電流波形如 圖 4.5 所示,其優點為輸入電流失真較低,且比峰值電流控制有更低的 切換雜訊,不需作斜率補償。缺點為平均電流感測器較為複雜。在電流 回授所得的電流誤差信號,需經由一個低通濾波器將高頻雜訊濾除取得 低頻成份後,再與鋸齒波比較產生脈波寬度調變信號。本計畫採用平均 電流控制法,將輸入電流改善成與輸入電壓同相的正弦波,達到功因校 正的目的。
vac
ig L
Vg
S
D iL
RL
Vo
C
1 K
(a)
, g avg
i
(b)
圖 4.5 平均電流控制法:(a)電路;(b)電流波形。
4.3 電路說明
本計畫中採用德州儀器公司生產之電源管理晶片 UC3854N,來完 成以平均電流法控制方式的電源側功率因數校正電路,圖 4.6 所示即為 本計畫所使用的功因校正內部電路圖。圖中可知其內部包含了電流控制 器、電壓控制器與前饋補償電路三部分,電流控制內迴路與電壓控制外 迴路如 4.2.2 節所述,是用來進行功因校正與穩定直流輸出電壓。而前 饋補償電路除了可以讓輸入功率保持平衡外,並兼具二階低通濾波器的 作用,其操作原理如下:
輸出電壓固定在某一個定值的情況時,如果輸入電壓因為某些外來 的因素突然變為n倍,此時電流命令信號也會跟著變成n倍,但是電路 中額外多出的前饋補償路徑,使得此時尚需除以前饋電壓的平方值(亦 即除以n2),導致乘法器輸出端的電流命令信號(i*)反而變成原來的1
n,所 以即使在輸入電壓變成n倍的情況下,電流卻反而變成1
n倍,這樣的結 果將使得輸入功率的維持在定值。
接著,對此內部電路動作原理進行分析。首先,假設功率開關處於 導通的情況下、時脈信號(clock)保持在低態的情況,此時二極體D逆向 偏壓截止,電感電流i 流經功率開關對電感儲能,迫使電感電流逐漸上