行政院國家科學委員會專題研究計畫 成果報告
跳遠助跑階段的知覺行動縱貫研究(I)
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 96-2413-H-028-005- 執 行 期 間 : 96 年 08 月 01 日至 97 年 07 月 31 日 執 行 單 位 : 國立臺灣體育大學(臺中)體育研究所 計 畫 主 持 人 : 陳重佑 計畫參與人員: 碩士班研究生-兼任助理人員:戴偉勳 碩士班研究生-兼任助理人員:張綺珊 碩士班研究生-兼任助理人員:陳郁婷 碩士班研究生-兼任助理人員:林義傑 處 理 方 式 : 本計畫可公開查詢中 華 民 國 97 年 12 月 31 日
跳遠助跑階段的知覺行動縱貫研究
(第一年期成果報告)
摘要
本研究的主要目的係以跑走動作的生物力學特徵為理論基礎,探討高頻雷射距離 測量系統收集連續性跑走動作量化分析的運動學參數,並通過動態的 GM(1, 1) 灰色模型處理實地運動競賽的遺漏數值。研究以雷射距離測量系統(LDM module 300C,100Hz)與 AcqKnowledge 3.7.2 版訊號分析統記錄與分析全國運動會或大 運會等男子跳遠之運動學參數計算,在步長與步頻計算方面,研究也將使用二度 空間影片分析的方法進行最後 2 步至起跳階段的參數確認。本研究計畫已收集 2004 年大專運動會、2005 年大專運動會與 2006 年大專運動會的相關資料,並預 計追蹤優秀跳遠運動員在未來三年的跳遠動作表現,並進行助跑動作過程的分 析。研究結果方面,從高頻雷射距離測量系統獲得的運動學參數,可以間接推算 助跑階段的步頻與步長特性,並立即回饋給運動教練員與運動員關於助跑過程的 質化或量化訊息。 關鍵詞:急行跳遠、助跑、運動學、移動性動作壹、問題背景
若深入探究移動性動作技能,其技術特徵不外乎是週期性或連續性的跑、 走、爬等動作。但是,尚有許多經歷跑走後的接續動作,例如較為單純的田徑運 動之跳高、跳遠、跨欄等,這些運動通常是通過助跑(approach run)階段進入 較為適當或是較佳的起跳位置,再完成主要動作。關於這種助跑後完成主要動作 的動作技術專書,雖然總是認為這一階段相當重要,可是論述著墨並非很多,或 者 Hay(1993)和 Boosey(1980)等總是以逐漸加速階段(gradual acceleration) 和刻意加速階段(conscious acceleration)作為這一階段的整體交代,而多是著墨 在較為重要的起跳階段(takeoff)、騰空階段(flight)與著地階段(landing)。思 索其主要原因可能有二,一為因為助跑階段的動作屬於連續動作,重覆因素較 高,亦非為主要動作,且有其他跑走相關文獻足以支持這一階段的技術特點;二 為研究的限制問題,固定的攝影機拍攝範圍有其局限性,而測力板多固定安置在 起跳板或前一步,想要大範圍採樣,就必須使用掃描攝影的分析技術了,但是, 掃描攝影技術的數位化處理在時程因素上頗為浪費,使得研究者望之卻步。 即使對於助跑過程的影片分析曠日廢時,Berg、Wade 和 Greer(1994)為了 檢證 Lee 和 Reddish(1981)提出的視知覺在接近時間(time to contact)動作控 制概念,所以仿製 Lee、Lishman 與 Thomson(1982)在跳遠動作分析的實驗, 使用二部高速攝影機(137Hz)並列的方式採集 19 名高中級跳遠運動員約 71 次 的跳遠動作,研究者利用這種攝影機並列架設的方法可以收集跳遠運動員踏板起跳前約 12 步助跑的動作,也就是拍攝範圍約 21 米,研究結果顯示跳遠助跑在進 入踏板起跳的過程,特別是在越接近起跳板時的變異性都產生大幅的增加,說明 了跳遠運動員在進入踏板階段會如同 Lee、Lishman 與 Thomson 的研究所述以垂 直衝量的調控修正步長,但是,是否為過去視覺參數τ(tau hypothesis)的控制 影響,則就仍待更有力的證據支持了。Berg、Wade 和 Greer 此一研究結果並不 十分認同 Hay(1988)推論優秀跳遠運動員在最後一步才調整步長、優秀跳遠運 動員較少使用視覺訊息作為踏板起跳的修正參照之假說。不過,Scott、Li 和 David (1997)與 Montagne、Cornus、Glize、Quaine 和 Laurent(2000)等二篇文獻卻 認為 Hay 與 Berg 等人的這二篇研究並無矛盾存在,這些研究者均認為完成跳遠 這種必須衝刺後準確踏板的知覺-動作控制,在步幅的變異參數特徵均明顯出現 相似的變異性,只是 Scott 等人認為專業接受過訓練的跳遠運動員會在起跳前 5 步逐漸降低步幅的變異性。 競技運動項目中的移動性動作技能一直是生物力學研究者關注的重點,而由 於過去研究認為步長與步頻是影響著跑步速度的關鍵性問題,所以,有許多的研 究者著述說明了步長與步頻的消長關係(Elliott & Blanksby, 1979; Luhtanen &
Komi, 1973)。Hunter、Marshall 和 McNair(2004a)則就這一負向交互作用(negative
interaction)深入說明,運動員腿長、離地重心高度、離地重心垂直速度等,均 是產生負向交互作用的原因所在,並且指出優秀運動員在加大離地瞬間水平速 度、減少離地瞬間垂直速度的動作技術下,就會提高步長與步頻,進而增加衝刺 的速度。不過,研究者認為運動員會因為疲勞的生理限制,通過離地瞬間重心垂 直速度的增加,以盡力維持高速衝刺跑而應有的步頻要素。 移動性動作技能中,田徑的跳遠(long jump)項目通常是生物力學研究者探 討的主題。因為這種運動項目的特點要求運動員在高速衝刺助跑的移動性技能 中,不損失過多的衝刺跑水平速度情況下,於起跳線(take-off line)前起跳,表 現的好壞在表現結果評量就是不超過起跳線的基本要求,使得起跳線到著地點能 擁有最大的水平距離。Jaitner、Mendoza 和 Schöllforn(2001)則認為一次成功的 跳遠表現,取決於運動員跳躍支撐階段將水平助跑速度轉變為起跳離地瞬間的垂 直速度與水平速度能力,研究者因此以圖樣辨識研究法(pattern recognition approach)對 18 名田徑運動員與學生,進行共約 57 次跳遠動作最後三步到起跳 階 段 的 運 動 學 資 料 參 數 比 對 , 並 針 對 最 佳 動 作 與 最 差 動 作 進 行 鑑 別 分 析 (discriminant analysis),結果顯示擺動腳與軀幹的運動在最後一步騰空階段對於 準備起跳離地扮演了相當重要的角色,研究者也指出助跑起跳階段的支撐腳位置 調整將受到騰空擺動階段與支撐階段的交互影響。 跳遠運動員助跑起跳的相關研究,如同前述 Jaitner 等人僅針對進入踏板並 接續起跳的研究,近年來尚有 Seyfarth、Blickhan 和 Van Leeuwen(2000)就起 跳階段膝關節肌肉工作的非線性特徵進行分析;也有 Kakihana 和 Suzuki(2001) 探討助跑起跳動作過程肌肉電訊號與生物力學參數對於起跳離地角度的影響; Hay、Thorson 和 Kippenhan(1999)也針對跳遠運動起跳階段的下肢伸肌被拉長 機制分析,說明肌肉牽張-縮短循環(stretch-shortening cycle,簡稱 SSC)對於起 跳階段的垂直速度並沒有顯著貢獻。這些研究在助跑距離將近 50 米的跳遠運動 資料收集,通常僅是著眼於踏板前 3-4 步至踏板離地這一階段的運動學特徵,而 使用測力板的動力學測量則通常只是將測力板埋設於起跳板處,並量測起跳的那 一步動力學參數。因為實驗儀器的侷限性,動力學測量僅能收集到最後一步的行 為參數;影片分析對於運動學參數的處理,在分析 3-4 步以至於起跳離地的取景
範圍就必須長達 15 米左右,生物力學研究者在資料收集與分析的技術則是使用 掃描攝影(panned camera)分析法(Jaitner, Mendoza, & Schöllforn, 2001; Scott, Li,
& Davids, 1997),也有些生物力學研究者使用紅外線光學辨識的設備進行運動學
參數收集(Hunter, Marshall, & McNair, 2004a; Hunter, Marshall, & McNair,
2004b)。當然,使用紅外線光學辨識系統進行數位化分析,就必須在實驗參加者 身上黏貼標誌點以利系統辨識,這種分析方法就無法應用在實際比賽情境的資料 收集了。 事實上,除了前述的數篇研究外,過去研究者幾乎很少記錄分析研究對象完 成長程加速跑或助跑起跳動作全程的生物力學特徵。當然,以運動科學實際服務 運動訓練的工作中,生物力學學者則經常使用光電管、光柵開關等分段記錄跑走 全程的各階段時間,並進一步由計算光柵開關或光電管間固定距離的動作時間估 算該階段的平均速度(velocity)或平均速率(speed)。然而這種分段計時的運動 學分析方式,從微觀的角度仍屬於一種動作結果的測量方式(performance outcome measures),想要確切描述運動者每一瞬間、每一位置的運動學參數,就 亟待更為新穎的研究方法和技術介入與開發。再者,從 Winter 和 Patla(1997) 就採樣理論(sampling theory)的觀點,指出數值收集的擷取頻率應至少為人體 動作頻率的 2 倍,若以百米衝刺跑為例,國際級運動員平均使用 45-50 步在約 10 秒左右跑完,所以,每秒就有 2-3 步的動作頻率,而過去分段計時常以每 10 米 作為各階段的劃分,顯然並無法真確反應人體跑走動作的原貌。
近年來,雷射距離測量系統(laser distance measurement system)已由開發初 期啟動後,僅量測特定一瞬間的位置或速度指標,發展為現今採樣頻率可高達 100Hz 的人體運動位置-時間關係曲線。本計畫研究者通過雷射距離測量系統對 於 2002 年亞運體操運動員進行跳馬助跑過程的運動學分析,也即時回饋體操運 動員實施跳馬助跑過程的運動學參數訊息,例如回饋助跑速度、開始減速距離、 最大速度產生的位置等,以協助教練員對於體操運動員助跑動作技術的修正(郭 榮全、陳重佑、俞智贏,2003)。有鑒於過去關於衝刺跑的動作發展研究,僅就 固定時間或一定的動作距離量測動作表現的結果,本計畫研究者則通過可以記錄 動作表現全程人體位移的雷射距離測量系統,進行青少年衝刺跑過程的年齡差異 與性別差異比較,由於研究對於衝刺跑全程進行記錄,所以,分析了衝刺跑過程 的速度變異性,研究顯示 15 歲青少年的衝刺跑能力正處於發展階段轉換的關鍵 期(Chen & Hsu, 2004)。
動作行為學領域中,視覺快速且直接地提供為動作控制的訊息,所以,視 覺與動作系統的配合工作非常密切。由於生物體通常僅有相當短的時間獲得視 覺訊息組織其動作,為了說明生物體在高速度運動情境的動作控制機制,所以, Lee 和 Reddish(1981)以視覺輸入作為訊息源的考量,實驗說明生物體移動到 上方或是一個物體接近時,對於一定接近速度下的接觸時間是受視覺視野的特 定簡單參數τ控制,此理論解釋了球賽時產生快速動作的時間調控,或跳遠運 動員進入起跳板時調整步長節奏而起跳等現象。爾後相關探討控制參數τ的實 證性研究就自此接踵而至,並有許多文獻論戰著控制參數τ是否存在等相關問 題(Bootsma、Fayt、Zaal、Laurent,1997;Wann,1996;Farrell、Thomson, 1999)。將跳遠作為此一視覺-行動在控制的問題,就成為研究者舉證解釋控制 參數τ的媒介了。 有鑑於訊息處理理論在解釋個體的動作表現,認為受個體的認知歷程所影 響 之 局 限 性 , 生 態 心 理 學 取 向 ( the ecological approach ) 則 就 直 接 知 覺
(direct-perception)與環境賦使(affordances)等觀點,指出出動作控制是根據 環境所賦予的特徵,如紋理梯度(textured gradients)、物體大小外觀及距離等 等,藉由周圍視覺(peripheral vision)的偵測暗示,以視覺流模式(optic flow
patterns)的評判方式,去影響一個人的動作和產生行動(Gibson,1979)。由於 知覺與行動彼此之間的相互作用且關聯,因此,動作控制是須藉由環境訊息的 傳導形成動作的修正,以最有效率的方式與環境互動完成工作任務。生命體不 僅運用感覺系統(sensation)感官週遭的環境變異,並能知覺(perception)且 引導身體做特殊任務的目標導向行動以達到工作需求。而個體本身也會因所知 覺環境的不同而有個別差異存在(王俊杰,2004)。Oztop、Bradley 和 Arbib(2004) 即應用環境賦使的概念,針對嬰幼兒的抓握物體動作以開放環的介入,達到透 過交互作用的方式,採目標導向的反覆試驗學習產生一更複雜的抓握行為。所 以生態理論最主要的貢獻在於個體能主動探索環境,利用多種方法來達到目標 的適應性(adaptability),不僅表現在動作系統,也同時出現在感知系統中,而 不是被動地期待環境所給予的限制與回饋(胡名霞,2003)。 Gibson(1979)以不變的特徵(invariant feature)和環境賦使的概念說明知 覺和行動的關係,主張個體動作行為的表現是知覺-行動連結控制的手段,認為 感覺是光流的陣列(optical array)提供時間(temporal)和空間(spatial)物件 配置明確或不變的豐富訊息,以直接截取(pick up)的處理方式,使視知覺收 集環境所給予的訊息,提供人直接和環境交互作用與尋找機會的歷程,是一種 直接知覺的理念,因此個體動作的產生是本身知覺外在環境的資訊,不須涉及 內在歷程的思索,知覺與行動是緊密相互結合的;而針對知覺和行動的關係, 吳惠如、陳怡珮和林美純(2004)則指出知覺能對行動提供有價值的訊息來源, 而行動和運動有助於精確的知覺判斷,所以,知覺與行動相互緊密結合。Cutting (1986)以跨領域的概念,結合哲學、歷史、知覺的科學和聲音平衡的觀點, 認為知覺對運動有判斷分析之可用性,透過移動中的個體之視覺流(optical flow)過程,藉由敏銳的視覺直接截取飛行物體有用的環境訊息,推論視覺訊 息足以產生個體知覺,基本上,此一視覺訊息並不考慮認知的介入。而 Vishton 和 Cutting(1995)認為當一個人走路或跑歩行經混亂的環境時,眼睛會追踪注 視前方的物體與個體之間的距離,為避免撞擊障礙物而想保持行進中的步速 時,有三個決定性的關鍵時期:個體觀察並識別物體之環境變異,做為調整自 己步法的依據,然後轉移步法以避開障礙物;而第一階段是研究者認為最重要 的一個時段,大約花費個體接近物體距離的 75%。所以視覺是個體步伐控制及 轉換的一個重要因素,並且視覺系統亦提供個體處於環境中時間和空間的訊 息,以調適走路的步速或步長的重要來源。 關於視知覺對於動作行為的影響也可以從下述研究的問題深入觀察,生物力 學研究者若排除跑步機上的實驗室情境收集資料,在實際跑道的衝刺就會面臨了 實驗參加者是否準確地踏上測力板之問題;而如果調整實驗參加者相對於測力板 的距離以要求實驗參加者可以成功踏上測力板,又會衍生出測驗的信度問題。所 以,Hunter、Marshall 和 McNair(2004b)就以 28 名運動屬性為衝刺跑的運動員 為實驗參加者,分析實驗參加者在 7-8 次衝刺跑中成功踏上測力板的 4 或 5 次衝 刺跑動作之運動學和動力學參數,以評估這一種生物力學測驗的系統性誤差、隨 機誤差和再測信度,結果顯示屬於測驗儀器與方法學的系統性誤差並不存在;而 運動學參數中,關於水平速度的運動學參數則是隨機誤差較少、信度較高,而垂 直方向的重心位移參數和減速的地面反作用力則呈現信度較低的現象。因此,
Hunter 等人在就實驗參加者成功踏上測力板的 4 或 5 次動作之動力學和運動學參 數平均後,考驗其信度問題,結果說明使用平均值描述衝刺跑的生物力學變數將 可減少隨機誤差,提高了測驗評量的再測信度。 關於 Hunter 等人研究的結果,Abendroth-Smith(1996)也同樣認為在步態 分析中,測力板計量分析系統的效度與信度問題確實受到了踏板或踏上測力板的 工作限制(task constrain)影響,Abendroth-Smith 以 12 名美國奧林匹克訓練中 心的中長距離跑運動員為實驗參加者,並使用一部 60Hz 的攝影機進行掃描攝影 分析(panning videography)實驗參加者以 2.46-3.38min/km 之步調(pace)踏上 距離 40 米的測力板,研究通過每一步長與平均步長的計算,指出實驗參加者為 了正確踏上測力板,就會通過視覺進行接近測力板時的步長調整,這種視覺對於 步長的調整策略,研究中指出專項中長距離跑者約有 7 名在使用視覺調整時,會 增加-減少足著地位置的變異性;而有 3 名實驗參加者使用視覺的控制策略,是 逐漸減低足著地位置的變異性;另 2 位實驗參加者則是不使用視覺瞄準踏板的策 略。視覺的調控下,步長產生了改變,就造成了測力板計量測驗的信度明顯降低
了。Hay(1988)、McGinnis 和 Abendroth-Smith(1989)與 Warren、Young 和 Lee
(1986)均認為這就是運動員利用視覺資源對於動作產生控制的證據,而不使用 視覺訊息的運動員則是屬於採用動作程式策略(motor programming strategies) 者。 上述研究顯示許多研究者關心移動性技能控制過程的課題,在研究方法與設 備包含了簡易的足印距離分析、二度空間的影片分析、掃描攝影分析,也有研究 者以紅外線光學辨識系統擷取人體關節標誌點。然而,研究者則曾利用高頻雷射 距離測量系統對於 2002 年亞運體操運動員進行跳馬助跑過程的運動學分析,也 即時回饋體操運動員實施跳馬助跑過程的運動學參數訊息,例如回饋助跑速度、 開始減速距離、最大速度產生的位置等,以協助教練員對於體操運動員助跑動作 技術的修正(郭榮全、陳重佑、俞智贏,2003)。再就過去相關問題研究的對象, 多僅限於單一次測驗的結果分析,而缺乏縱貫性的多次追縱研究與探討,關於知 覺行動關係的長期變化與資料建立的必要性,則成為本研究關心的論題。 本研究的主要目的係以生態理論的觀點,追蹤探討專業跳遠運動員在不同場 次的知覺動作控制機制,藉以說明知覺行動聯結的機制在動作的調整與運動表現 的提昇是否產生關聯。
貳、研究方法
本研究主要針對高頻雷射距離測量系統在移動性動作技能的動作過程測驗 方法與問題進行探討,在實證性數據收集、處理與分析等方面,茲分下列小節 說明:1. 研究對象;2. 實驗儀器與設備;3. 實驗步驟;4. GM(1, 1)灰色模 式的處理方法;5. 數值的濾波與導數計算;6. 運動學參數獲得的方法;7. 先 前研究的資料。 1. 研究對象 本文研究者過去使用高頻雷射距離測量系統分析青少年加速跑的運動學特 徵,也使用此系統協助 2002 年亞運體操運動員在跳馬項目的訓練實務,這些資 料的獲得可以說是一種準實驗室情境的條件下採樣,若測驗時發現部分數值資料遺失,在處理上則視為該次試做失敗或視作該實驗參加者流失即可。但是, 實際運動場的比賽情境中,若僅是部分資料流失,將有可能致使重要的該次表 現失去完整的記錄。 是以,本研究在移動性動作技能的資料收集中,擬採用真實運動場比賽情 境資料,就資料收集與分析過程的問題,在生物力學的理論基礎與資料的動態 特性提出解決的方法。真實運動比賽情境的資料以全國大專院校運動會(簡稱 大運會)之甲組田徑跳遠決賽、全國運動會或臺灣地區舉辦的國際田徑邀請賽 等作為移動性動作技能運動學分析的參考。本研究已連續收集 2004 年大運會、 2005 年大運會、2006 年大運會等相關賽事的資料,為了追蹤探討國內優秀跳遠 運動員的動作,擬須要收集記錄分析 2007 年至 2009 年等相關重要賽事的資料, 以進一步了解優秀跳遠運動員在助跑動作的表現特徵。 2. 實驗儀器與設備 本研究原始運動學參數的獲得主要是通過高頻雷射距離測量系統進行採樣 與分析,儀器與設備如下: A. 硬體方面
a. 高頻雷射距離測量系統(Jenoptik Laser, Optik, Systeme CmbH,LDM 300
C-SPORT,德國製,如圖 1),採樣頻率 100Hz。
測量範圍:0.5-400.0 米,具有反射鏡的條件下可達 1500.0 米。 雷射類型:Laser Class 1-EN 60825-1:1997-03。
b. Manfrotto 055C 腳架、Manfrotto 029 雲臺(義大利製)。
c. TWINHEAD 340S8 攜便式終端訊號處理系統(Intel Pentium III 997MHz)。
d. Sony 高畫值數位攝影機(預計購置 Model DCR-VX2000 以上之機型)。
圖 1:高頻雷射距離測量系統。(LDM module 300C) B. 分析軟體方面
a. LAVEG 3.8 版雷射距離訊號收集與處理程式(Jenoptik Laser, Optik, Systeme
CmbH)。
b. AcqKnowledge 3.7.2 版生物訊號分析系統(BIOPAC System, Inc.)。
d. Origin 7.0 版專業版科學訊號繪製程式(OriginLab Corporation)。 e. 灰色預測 GM(1, 1)模型軟體程式進行模型建構,並由本文研究者另行歸 零初始值與滾動建模的計算。 3. 實驗步驟 本研究通過高頻雷射距離測量系統,收集全國運動會、國際田徑邀請賽或 大運會甲組田徑跳遠運動員實施 6 次助跑起跳過程的運動學參數,資料收集由國 立臺灣體育學院運動科學研究中心生物力學研究室專案提出申請,並由大運會籌 備處同意,始進行實驗資料的收集。 測驗時,高頻雷射距離測量系統架設在運動員開始助跑區的那一端,並將 高頻雷射距離測量系統固定於專業角架與雲臺上,資料收集人員調整角架與雲臺 高度,俾使資料收集時可以通過高頻雷射距離測量系統的瞄準視窗對準運動員助 跑全程的背部。 高頻雷射距離測量系統固定於專業角架與雲臺上,並通過 15 針序列連接埠 (15 pin serial COM port)連接線將雷射距離量測得的訊號傳送到攜便式終端訊 號處理系統,高頻雷射距離測量系統的電力供應設備為可攜式電源供應器 (12V)。正式採樣的過程,在跳遠運動員進入助跑跑道並準備開始助跑時,本 研究資料收集人員即通過瞄準視窗對準跳遠運動員的背部,且隨即透過終端訊號 處理系統先啟動高頻雷射距離測量系統。實驗資料收集時,資料收集人員極力通 過瞄準視窗對準與跟隨著跳遠運動員該次試跳動作全程的背部,至跳遠動作全程 結束後,方再經由終端訊號處理系統關閉高頻雷射距離測量系統的資料記錄工 作。 為了檢查步頻、步幅等參數計算的效度,本研究計畫於起跳階段進行二度 空間攝影分析,以評估起跳前約 2-3 步的落腳位置、步幅與步頻等資料,數位化 的人體標誌點擬設定為左腳腳尖、左腳腳跟、右腳腳尖、右腳腳跟等四個位置。 實驗獲得的人體位置原始 ASCII 資料經由 AcqKnowledge 3.7.2 版生物訊號 分析系統進行轉檔與零點平移,才進行運動學參數的計算。轉檔與零點平移係將 原始 ASCII 資料以微米(mm)為單位的數值轉換單位為米(m),且將原本以雷 射距離測量系統的所在位置作為直線運動的座標原點,平移到以起跳線為原點。 4. GM(1, 1)灰色模式的處理方法 在競技運動中使用高頻雷射距離測量時,因為,比賽場的環境並不是測驗 者可以完全掌控,參加比賽的運動員又經常有其習慣性,所以,測量時的干擾因 素進入後,數值獲得就產生了偏差。這些干擾因素,例如:測驗時該次試跳運動 員出發後,在該次試跳尚未結束前,下一位運動員已然進入助跑跑道,進行動作 的準備,縱使本研究任務編配有實驗襄助人員協助進出助跑跑道的秩序,可是, 仍有零星數位運動員由於動作的習慣性影響了測驗。此外,這種比賽場地的測 驗,也或多或少有資料收集人員在瞄準運動員背部的過程產生誤差。這些情況發 生時,若該次試跳又是屬於運動成績最佳的一次試跳,或是其他研究或分析想要 探討的關鍵試跳,本研究則必須盡可能對於這些遺漏數值在一特定範圍下插補還 原其應有的面貌。本研究依運動學時間序列的動態性變化考量,遂採用 GM(1, 1)模型的理論與方法處理遺漏的數值。 GM(1, 1)源模型為 x(0)(k) + az(1)(k) = b 其中 z(1) (k) = 0.5 (x(1)(k) + x(1)(k - 1));
x(1)(k) =
k m m x 1 ) 0 ( ) ( (AGO) 而 GM(1, 1)源模型的白化方程(或稱為影子方程)為 b ax dt dx (1) ) 1 ( 在 dt dx(1) 對應到 x(0) (k);ax(1)對應到 az(1) (k); x(1)= (x(1)(1), x(1)(2), x(1)(3),…,x(1)(k)) 對應到 x(1)(t); x(0)= (x(0)(1), x(0)(2), x(0)(3),…,x(0)(k)) 對應到 x(0)(t)等條件下 令 x(0)(1) = x(1)(1) 求解微分方程,而到離散化的 x(1)響應方程式為 x(1)(k + 1) = ( x(0)(1))e-ak+ a b (1 - e-ak) x(0)(k + 1) = x(1)( k + 1) - x(1)(k ) 上述方程的第一項係反應初始值 x(0) (1)所使用的一種動態過程;而第二項可以反 應 a b 此一參數比值的動態作用。在 b = 0 或 a 趨近於無限大時, 初值項則為 (x(0)(1))e-ak 參數項則為 a b (1 - e-ak) 本研究由於需要插補遺失數值,所以,x(0) (k + 1)則為此一模型的預測值(在 k + 1 > n 時)。在求解參數 a 與 b 時,本研究以矩陣形式進行辨識計算,其辨識計算係採用最小平方法(least square method)求解。
根據 GM(1, 1)源模型 x(0)(k) + az(1)(k) = b 且其數列 x(1)= (x(1)(1), x(1)(2), x(1)(3),…,x(1)(n)) x(0)= (x(0)(1), x(0)(2), x(0)(3),…,x(0)(n)) x(1)(k) =
k m m x 1 ) 0 ( ) ( 所以 x(0)(2) + az(1)(2) = b x(0)(3) + az(1)(3) = b …… x(0)(n) + az(1)(n) = b 其矩陣表達式為 b a n z z z n x x x 1 ) ( ... 1 ) 3 ( 1 ) 2 ( ) ( ... ) 3 ( ) 2 ( ) 1 ( ) 1 ( ) 1 ( ) 0 ( ) 0 ( ) 0 ( 以最小平方法求解的計算式為 N T T Y B B B aˆ( )1而 b a aˆ , 1 ) ( ... 1 ) 3 ( 1 ) 2 ( ) 1 ( ) 1 ( ) 1 ( n z z z B , ) ( ... ) 3 ( ) 2 ( ) 0 ( ) 0 ( ) 0 ( n x x x YN GM(1, 1)白化模型的殘差檢驗為 % 100 ) ( ) ( ˆ ) ( ) ( (1) ) 1 ( ) 1 ( ) 1 ( k x k x k x k % 100 ) ( ) ( ˆ ) ( ) ( (0) ) 0 ( ) 0 ( ) 0 ( k x k x k x k 方程中 x(1)(k)、x(0)(k)為實際值,xˆ(1)(k)、xˆ(0)(k)為模型計算值。 100% -(1)(k)或 100% -(0)(k)則為模型精度,而本研究利用已知的 x(0)中第 1 至 第 4 個數值構成的數列 (0) 4 , 1 x 之模型預測xˆ(0)(5),通過第 1 至第 5 個數值構成的數 列 (0) 5 , 1 x 之模型預測xˆ(0)(6),通過第 1 至第 6 個數值構成的數列x1(,06)之模型預測 ) 7 ( ˆ(0) x 。在數值的處理上稱之為滾動建模,是一種對數列的發展進行預測,其預 測的可信度(或稱為預測的精度),以預測的殘差 e(k)平均數進行計算, % 100 ) ( ) ( ˆ ) ( ) ( (0) ) 0 ( ) 0 ( k x k x k x k e , k = 5, 6, 7
7 5 3 1 ( ) k k e e 5. 數值的濾波與導數計算 本研究實驗獲得的原始運動學參數(原始位置-時間曲線),若有產生部分數 值遺漏者,則採用 GM(1, 1)灰色模型法進行補點的處理,所有數值則再通過Butterworth 低通濾波處理(Butterworth low pass filter)。關於截止頻率(cutoff
frequency)的選擇,依研究者過去相關研究的殘差分析(residual analysis)結 果,選擇使用 4Hz 進行數值噪音的過濾。 濾波處理後的位置函數 y(t)計算速度函數 v(t),此間斷數列導數(或稱為微 分)計算的方式為 t t y t y t v 2 ) 1 ( ) 1 ( ) ( y(t+1)為時間 t + 1 時的位置; y(t - 1)為時間 t - 1 時的位置; 2t 為時間 t + 1 與時間 t - 1 的時間差。 6. 運動學參數獲得的方法 根據 Hay(1993)的定義,在田徑運動中的半個跑步周期稱之為一步(a stride),也就是左(右)腳著地到下一次的右(左)腳著地的這一階段,而這一 階段的左右腳著地距離稱之為一個步長;而在人體走路動作的研究中,左腳著地 到下一次的左腳著地之完整周期才稱為一步(a stride),一個周期的一步則包含 了兩個跨步(step)。因此,跑和走動作形式是周而復始地下肢著地、下肢離地 特徵;下肢著地時,人體受到前後水平方向的地面反作用力向後,而產生原本具 有一定移動速度減慢的曲線特徵;下肢在離地階段,由於經歷了下肢向後方向地
扒地,人體就受到前後水平方向地面反作用力向前的作用,而出現移動速度逐漸 增加的曲線特徵,並在離地前或瞬間會產生移動速度的相對最大值。理論上,人 體騰空階段的水平方向沒有外力作用,移動的水平速度應是維持不變的一定值, 但是,隨著跑走的移動速度越快,空氣阻力向後減速的影響也就逐漸增加。是以, 在連貫這些周而復始的跑步動作移動速度特徵,其速度曲線的每一個起伏變化, 就象徵了左右兩腳每一週期的跑走動作,並稱之為每一步。本研究因為探討的主 題均是以動作速度快的跑步動作為分析的重點,所以,關於步長的定義係採用田 徑運動常用的方式,且由於跑步動作的重要特徵是雙腳有同時離地的騰空階段階 段,就基本力學原理,在空氣阻力不計的情況下,人體騰空階段水平方向並沒有 外力作用,其水平速度應為定值。因此,就生物力學定義的一個步長由離地距離、 飛行距離和著地距離總加(Hay,1993),又跑步動作有明顯的腳離地、腳著地 過程,所以,本研究在步長的判定則以雷射距離測量系統獲得的位移-時間曲線 微分值的速度極值為步長計算的界定,其方法如圖 2 所示。 步頻的基本定義為運動員跑步動作每秒的步數,事實上就是腳接觸地面時間 與在空中時間的總和(每一步時間,stride time)之倒數。本研究在計算步頻時, 係以位移-時間曲線微分值的速度極值之時間差為每一步時間,而這每一步時間 的倒數則為步頻,其方法見圖 2。 圖 2:助跑階段的參數示意。註:Vmax代表最大速度;Tmax代表最大速度所相對 應到起跳板的時間;Pmax代表最大速度所相對應到起跳板的距離;jump 代表起
參、研究結果—第一年期的工作進度報告
本計畫屬於多年期的追蹤研究,在 2007 年 8 月開始執行以來,計畫主持人即著 手籌措研究計畫的實施,直至 2007 年 12 月止的工作重點包括了:1. 研究方法 的再檢證;2. 過去收集資料的匯整與分析;3. 2007 年 10 月下旬的全國運動會資 料收集。相關的部份成果說明如下: 1. 研究方法的再檢證 為了評估通過高頻雷射距離測量系統,推論計算獲得的跑走動作運動學參 數,是以這種推論計算的結果就必須經過其他方法的驗證。研究以傳統的影片分 析方法,記錄分析一位體育系專修學生完成衝刺跑的運動學參數,並與高頻雷射 距離測量系統分析的結果進行比對。 A. 二度空間影片數位化分析 實驗記錄跑步動作的高速攝影機為 IDT MotionPro X3 數位影像系統一套(Redlake Alliance, INC.),攝影機架設距離實驗參加者約 30 米、拍攝景
寬約 5.2 米、景高約為 4 米,研究設定攝影機的採樣頻率為 500Hz,拍攝的 快門(shutter)則設定為 1/10000,影片的解析度(resolution)則為 1280 × 1024 pixels。在比例尺的架設方面,本研究採用二組高為 2 米的標誌桿 (Myzox 牌,日本製)垂直置放於攝影平面,二標誌桿的距離為 5 米,進 行二度空間運動平面的校正。 在影片資料的數位化處理方面,本研究通過 Peak Motus 9.0 版二度空間 影片分析系統,對於實驗參加者的身體關節標誌點進行數位化的處理,擷 取的 17 個標誌點依序為頭、左右肩、左右肘、左右腕、左右髖、左右膝、 左右踝、左右腳跟、左右腳尖等,將人體分成 12 個肢段。研究並通過德國 法蘭克福大學運動生物力學實驗室開發的 Hanavan 人體肢段參數模型,進 行身體各肢段重心位置與身體重心百分比的計算,以進行影片分析的身體 重心運動學參數評估。數位化處理的標誌點原始資料,則經過 Butterworth 四階零相位移低通濾波的修勻處理,修勻的截止頻率(cutoff frequency)設 定為最佳化,修勻處理後的資料方進行一次導數的速度計算。有關低通濾 波處理與導數計算的方法,請參見本章第三節。從影片分析中進行步長與 步頻的計算,則通過拍攝的影片資料觀察實驗參加者腳尖離地、腳跟或腳 尖著地的方式,作為相關時相的判定以計算步頻之訊息,再就此關鍵時相 計算步長資料。 B. 高頻雷射距離測量系統的運動學分析 在高頻雷射距離測量系統的運動學參數收集方面,檢證實驗在影片拍 攝範圍的左側比例尺外 15.5 米,架設高頻雷射距離測量系統,記錄實驗參 加者加速衝刺快跑的位移-時間曲線,原始資料經 4Hz 低通濾波修勻處理 後,將座標系統平移轉換成與二度空間攝影分析系統相同,計算一次導數 以獲得速度-時間曲線。再通過本研究提出的步頻與步長判別方式,計算高 頻雷射距離測量系統的步長與步頻等相關訊息。 研究為了結合二度空間影片分析系統與高頻雷射距離測量系統的運動 學資料,考慮了訊號同步處理的方法和座標系歸零轉換處理等二種方法, 其中,因為高頻雷射距離測量系統主要是通過瞄準視窗對準跑步者身體軀 幹的部位,研究假定這一記錄的運動學參數比較接近人體軀幹(trunk)部
位的重心運動學參數。而若就訊號在時間同步的觀點,即使高頻雷射距離 測量系統記錄的就是人體軀幹的運動學訊息,將此訊息與影片分析的軀幹 運動學參數同步比對,這將導致身體軀幹基本厚度的問題與雷射距離測量 系統觀測的位置不同,有可能產生約 5-10 公分的位置差異。因此,在檢證 實驗中,研究採用平移轉換高頻雷射距離測量系統座標系之方法,結合影 片分析系統與高頻雷射距離測量系統的運動學資料。 圖 4:高頻雷射距離測量系統與影片分析法獲得的軀幹重心速度-位置曲線。 C. 檢證結果 在檢證實驗中,本研究影片數位化分析實驗參加者衝刺跑動作的資 料,並與轉換過的高頻雷射距離測量系統之資料合併,其軀幹重心的速度-位置曲線如圖 4 所示,在影片位置 2.0 米至 4.0 米間,實驗參加者約完成一 步,二種測量方法所獲得的速度-位置曲線,從極值產生的位置觀察,具有 相當接近的變動特徵(圖 4 的縱軸座標係為 6.5-9.0 區間放大的結果)。此 二曲線經估計標準誤差值(standard error of estimate,SEE)的計算,顯示 數值的差異約為 0.151 米/秒。由於影片分析在計算人體動作的速度仍存在 有誤差的問題,這些誤差的來源包括了人體肢段參數的選擇、數位化分析 的過程、資料修勻處理的過程、數值微分計算的誤差量放大等,所以,估 計標準誤差值 0.151 米/秒並非就是表達高頻雷射距離測量系統評估人體移 動性動作技能(跑走動作)的誤差,此一數值卻是顯示高頻雷射距離測量 系統獲得的軀幹速度-位置曲線與二度空間影片分析數位化處理獲得的資 料差異情況。從差異性的曲線特徵與差異量的均方根值(就是 SEE 值)來 看,本研究方法在探討跑走此種的移動性動作技能,深具測驗的信度水準。 為了探討高頻雷射距離測量方法計算得的步頻、步長與速度,相較於 影片分析法獲得這些運動學參數的差異,是以通過傳統的生物力學影片分 析計算步頻、步長的方式,評量檢證實驗的實驗參加者直線衝刺跑步動作 3 次的動作資料,就檢證實驗的過程說明,影片拍攝的範圍為 5.2 米,這一範 圍約能記錄實驗參加者完成一步的完整動作資料。在數位化分析的過程, 研究者遂以較為主觀的影片觀察方式,標記腳跟著地與下一次另一腳跟著 地的影片,並設定為跑步動作的關鍵時相,再計算這二次關鍵時相的影片 時間間隔,就是此一步動作的每步時間,而這一步時間的倒數即為該次動
作的步頻;而數位化分析獲得的這二張影片雙腳腳跟著地距離,就是該次 動作的步長訊息;上述的步長與步頻的乘積就是該次動作的平均速度。實 驗也通過本研究推論的步頻、步長與速度分析方法,從高頻雷射距離測量 系統讀取影片拍攝分析範圍的這一步相關步頻、步長與速度資料,並彙整 影片分析的結果呈現於表 1。 表 1:雷射距離測量法與影片分析法獲得的步頻、步長與速度差異比較。 雷射距離測量 影片分析 差異百分比 試 做 步長 a 步頻 b 速度 c 步長 a 步頻 b 速度 c 步長 d 步頻 d 速度d 1 2.01 4.13 8.30 1.89 4.35 8.22 6.35 -5.06 -0.97 2 1.99 4.17 8.30 1.94 4.42 8.57 2.58 -5.66 -3.15 3 2.05 4.00 8.20 1.96 4.17 8.17 4.59 -4.08 -0.36 平均數 4.51 -4.93 -0.60 註:速度=步長×步頻;單位:a米、b步/秒、c米/秒、d %。 表 1 顯示 3 次跑步動作中,高頻雷射距離測量系統與影片分析的差異, 在步長的差異相較於影片資料平均約增加了 4.51%、步頻則平均減少了 4.93%,也就是說,雷射距離測量系統估算步長資料約較影片分析的資料高 0.05 米至 0.12 米,而步頻的資料則呈現雷射距離測量系統較影片分析法少 約 0.14 步/秒至 0.25 步/秒。因為速度的參數係由步頻與步長的乘積計算而 來,二種分析方法獲得跑步平均速度的資料,在差異上就降低了許多,如 表 1 所示為 0.03 米/秒至 0.27 米/秒之間,相較於影片分析的資料,則有-3.15% 至 0.36%之差異。在此處的方法檢證,本研究仍然要強調是此二種分析方 法的差異比較,主要的原因,也不外乎影片分析獲得的步長與步頻訊息, 乃通過分析者肉眼觀察的主觀處理,且影片拍攝頻率又為 500Hz,腳跟著 地後造成身體軀幹速度或是身體重心的速度變化之延遲與否,就成為研究 關鍵時相判斷的研究限制了。然而,從 5%左右的差異思索本研究方法推論 的運動學資料,應屬於可接受的範圍。 2. 過去收集資料的匯整與分析 本研究收集與分析的 2006 年大運會女子甲組田徑跳遠決賽資料,顯示了起 跳前的 5-6 步出現相同的視知覺控制情況,可是,這種控制的特徵卻是每位運動 員均有所不同。以最後成績為第一名的 A 運動員步長進行探討,如表 2,其起跳 前 5 步,步長的訊息顯示了 2.22 米、1.78 米、2.05 米、1.29 米到 1.87 米的遞次 變化,這種變化的程度確有 40%以上的大幅改變;而同為比賽成績相同,可是最 後排名第二名的 B 運動員,其最後 5 或 6 步至起跳前的步長變化範圍在 1.98 米 到 2.17 米之間,這一動作的步長變化幅度就僅達約 10%,可是,最後一步的步 長可以大幅增加到 2.90 米(約增加了 40%)。 若僅就第一名與第二名的這二次表現進行比較,研究者推論 A 運動員在起 跳前以特定腳調整或控制最後一步的準確踏板;B 運動員在起跳前則先是微微調
整落腳位置,而在最後一步時方有大幅改變步長的踏板技術。這種差異也就表現 在助跑速度的變化特徵有所不同,因為,A 運動員的動作速度沒有超過 9.00 米/ 秒,而採用特定腳的逐步調整步長策略,所以,動作速度的變化就是一種漸緩的 趨勢進入踏板起跳位置;A 運動員則由於動作速度可以穩定維持在 9.00 米/秒以 上,是以最後幾步的步長微調後,再憑藉最後一步的加大步長,大幅減速、踏板 起跳,即為該運動員的技術特點,但是,此般突然跨大步產生減速工作的策略, 是否會對於最後一步之向上推蹬造成控制的限制?則有待未來的訓練工作審慎 評量了。 表 2:A 運動員最佳成績的助跑過程運動學參數。(成績 5.92 米) 時相 時間 (秒) 位置 (米) 速度 (米/秒) 步長 (米) 步頻 (步/秒) 離地瞬間 0.12 0.96 8.03 起跳線 0.00 0.00 8.18 起跳前 1 步離地 -0.22 -1.87 8.61 1.87 2.94 起跳前 2 步離地 -0.37 -3.16 8.81 1.29 6.67 起跳前 3 步離地 -0.61 -5.21 8.68 2.05 4.17 起跳前 4 步離地 -0.82 -6.99 8.80 1.78 4.76 起跳前 5 步離地 -1.08 -9.21 8.86 2.22 3.85 起跳前 6 步離地 -1.33 -11.30 8.62 2.09 4.00 起跳前 7 步離地 -1.59 -13.45 8.80 2.15 3.85 起跳前 8 步離地 -1.85 -15.57 8.45 2.12 3.85 起跳前 9 步離地 -2.11 -17.66 8.34 2.09 3.85 起跳前 10 步離地 -2.36 -19.64 8.33 1.98 4.00 起跳前 11 步離地 -2.64 -21.82 8.00 2.18 3.57 起跳前 12 步離地 -2.91 -23.88 7.89 2.06 3.70 起跳前 13 步離地 -3.16 -25.73 7.52 1.85 4.00 起跳前 14 步離地 -3.42 -27.58 7.22 1.85 3.85 起跳前 15 步離地 -3.69 -29.43 6.85 1.85 3.70 起跳前 16 步離地 -3.96 -31.14 6.31 1.71 3.70 起跳前 17 步離地 -4.22 -32.70 5.74 1.56 3.85 起跳前 18 步離地 -4.45 -33.96 5.33 1.26 4.35 起跳前 19 步離地 -4.71 -35.24 4.49 1.28 3.85 起跳前 20 步離地 -4.97 -36.25 3.60 1.01 3.85
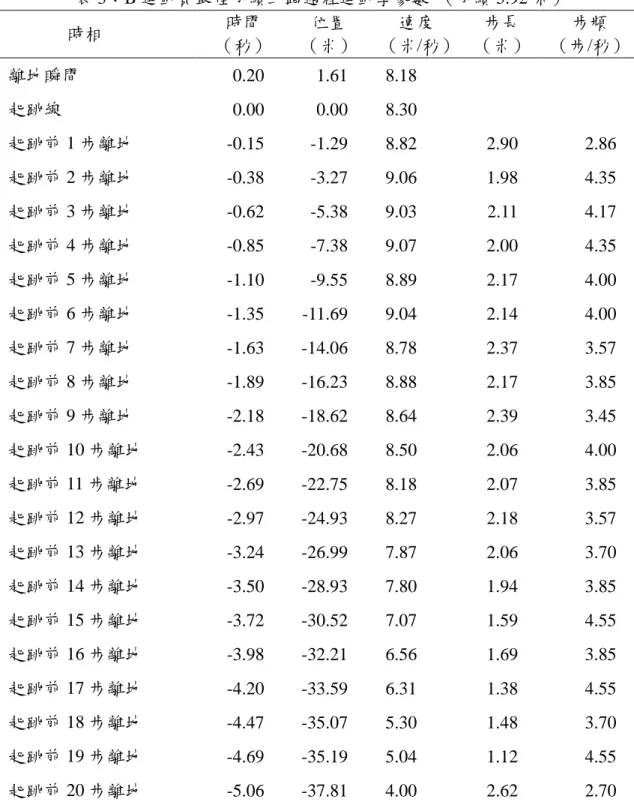
表 3:B 運動員最佳成績助跑過程運動學參數。(成績 5.92 米) 時相 時間 (秒) 位置 (米) 速度 (米/秒) 步長 (米) 步頻 (步/秒) 離地瞬間 0.20 1.61 8.18 起跳線 0.00 0.00 8.30 起跳前 1 步離地 -0.15 -1.29 8.82 2.90 2.86 起跳前 2 步離地 -0.38 -3.27 9.06 1.98 4.35 起跳前 3 步離地 -0.62 -5.38 9.03 2.11 4.17 起跳前 4 步離地 -0.85 -7.38 9.07 2.00 4.35 起跳前 5 步離地 -1.10 -9.55 8.89 2.17 4.00 起跳前 6 步離地 -1.35 -11.69 9.04 2.14 4.00 起跳前 7 步離地 -1.63 -14.06 8.78 2.37 3.57 起跳前 8 步離地 -1.89 -16.23 8.88 2.17 3.85 起跳前 9 步離地 -2.18 -18.62 8.64 2.39 3.45 起跳前 10 步離地 -2.43 -20.68 8.50 2.06 4.00 起跳前 11 步離地 -2.69 -22.75 8.18 2.07 3.85 起跳前 12 步離地 -2.97 -24.93 8.27 2.18 3.57 起跳前 13 步離地 -3.24 -26.99 7.87 2.06 3.70 起跳前 14 步離地 -3.50 -28.93 7.80 1.94 3.85 起跳前 15 步離地 -3.72 -30.52 7.07 1.59 4.55 起跳前 16 步離地 -3.98 -32.21 6.56 1.69 3.85 起跳前 17 步離地 -4.20 -33.59 6.31 1.38 4.55 起跳前 18 步離地 -4.47 -35.07 5.30 1.48 3.70 起跳前 19 步離地 -4.69 -35.19 5.04 1.12 4.55 起跳前 20 步離地 -5.06 -37.81 4.00 2.62 2.70 前述的過去行動-知覺研究,在研究或實驗的工作,主要為跳遠動作,研究 者們對於視知覺在動作表現的調整,均以步長的反應為一種因應環境或動作等交 互作用的外顯特徵,並在這種研究假定下探討行為表現。本研究就過去關於視知 覺對於動作調整的控制因素研究,多僅是侷限於步長的探討,而確實有必要思考 步頻在動作行為的調整策略。就 C 運動員的步頻資料分析,該運動員為了維持 其一定的跑速,在策略上採用小步長、高步頻的動作特點,因此,從表 4 的分析 結果顯示該運動員的最後數步的步長約為 1.50 米,且步長的變異性也較其他運
動員要來得小;反觀步頻資料,C 運動員在助跑末期的步頻約在 5.56 步/秒以上, 雖然資料採集無法獲得最後一步的步長與步頻訊息,但採用小步長控制踏板的策 略,似乎是該運動員較其他運動員不同的表現特徵。 表 4:C 運動員最佳成績的助跑過程運動學參數。(成績 5.73 米) 時相 時間 (秒) 位置 (米) 速度 (米/秒) 步長 (米) 步頻 (步/秒) 離地瞬間 * * * 起跳線 0.00 0.00 7.91 起跳前 1 步離地 -0.07 -0.57 8.22 * * 起跳前 2 步離地 -0.25 -2.03 8.36 1.46 5.56 起跳前 3 步離地 -0.42 -3.49 8.64 1.46 5.88 起跳前 4 步離地 -0.60 -4.99 8.47 1.50 5.56 起跳前 5 步離地 -0.81 -6.76 8.68 1.77 4.76 起跳前 6 步離地 -1.03 -8.62 8.56 1.86 4.55 起跳前 7 步離地 -1.29 -10.77 8.48 2.15 3.85 起跳前 8 步離地 -1.49 -12.44 8.45 1.67 5.00 起跳前 9 步離地 -1.74 -14.45 8.27 2.01 4.00 起跳前 10 步離地 -1.97 -16.30 8.41 1.85 4.35 起跳前 11 步離地 -2.25 -18.52 8.10 2.22 3.57 起跳前 12 步離地 -2.46 -20.17 7.79 1.65 4.76 起跳前 13 步離地 -2.72 -22.13 7.78 1.96 3.85 起跳前 14 步離地 -3.00 -24.18 7.51 2.05 3.57 起跳前 15 步離地 -3.26 -26.01 7.24 1.83 3.85 起跳前 16 步離地 -3.52 -27.72 6.46 1.71 3.85 起跳前 17 步離地 -3.77 -29.29 6.44 1.57 4.00 起跳前 18 步離地 -4.06 -31.01 5.99 1.72 3.45 起跳前 19 步離地 -4.55 -33.43 4.76 2.42 2.04 起跳前 20 步離地 -4.72 -34.21 4.34 0.78 5.88 *無法判讀
b. c. 圖 3:運動員 A 完成 6 次跳遠動作之起跳前 8 步的動作分析。a. 為起跳前 8 步 的平均步長;b. 為起跳前 8 步的落腳位置標準差;c. 為起跳前 8 步的平 均離地速度。0 代表為起跳離地瞬間的水平速度。 圖 3 為 2006 年大運會男子甲組運動員 A 完成 6 次試跳的助跑動作資料,該 運動員的最佳成績為 7.83m,由圖 3c 可以發現運動員在起跳前 8 步的助跑速度
隨著越接近起跳板其速度越來越快,但是,在起跳離地瞬間的水平速度的標準差 相當大,顯示該名運動員在起跳的最後一步仍有控制減速的動作調整機制,這一 機制可以從 a 與 b 圖顯示的起跳前第三步深入解釋,因為落腳位置的標準差在起 跳前第三步增加了,且反應到起跳前第三步步長的變異大幅增加,就有可能造成 起跳瞬間的速度產生較劇烈的變化。由圖 3 的綜合比較,研究的資料足以解釋運 動員的知覺調控策略。
引用文獻
王俊杰(2004):男性晚期兒童立定跳遠動作表現的相關因素。未出版碩士論文, 國立臺灣師範大學,臺北市。 吳惠如、陳怡珮和林美純(2004):知覺、運動和行動。擷取日期 2004 年 11 月 28 日。資料取自 http://dlearn.ncue.edu.tw/1000110116/2004_LearningTechCongnition/new_page_1 00.htm 。 胡名霞(2003):動作控制與動作學習。台北縣:金名。 郭榮全、陳重佑、俞智贏(2003):短跑訓練對跳馬助跑之影響。中華民國體育 學會體育學報,35,25-35。Abendroth-Smith, J. (1996). Stride adjustments during a running approach toward a force plate. Research Quarterly for Exercise and Sport, 67(1), 97-101.
Berg, W. P., Wade, M. G., & Greer, N. L. (1994). Visual regulation of gait in bipedal locomotion: Revisiting Lee, Lishman, and Thomson (1982). Journal of
Experimental Psychology: Human Perception and Performance, 20, 854-863.
Boosey, D. (1980). The jumps: Conditioning and technical training. Victoria, Australia: Beatrice.
Bootsma, R. J., Fayt, V., Zaal, F. T. J. M., & Laurent, M. (1997). On the information-based regulation of movement: What Wann (1996) may want to consider. Journal of Experimental Psychology: Human Perception and
Performance, 23, 1282-1289.
Chen, C. Y., & Hsu, C. M. (2004). Developmental effects of sprinting variability for adolescence. Book of Abstracts for the 8th International Asian Society of
Adapted Physical Education Symposium (p. 21). Sahid Raya, Bali, Indonesia:
2004 the 8th International Asian Society of Adapted Physical Education Symposium.
Cutting, J. E. (1986). Perception with an eye for motion. Cambridge, MA: MIT Press. Elliott, B. C., & Blanksby, B. A. (1979). A biomechanical analysis of the male jogging
action. Journal of Human Movement Studies, 5, 42-51.
Farrell, M. J., & Thomson, J. A. (1999). On-line updating of spatial information during locomotion without vision. Journal of Motor Behavior, 31(1), 39-53. Gibson, J. J. (1979). The ecological approach to visual perception. Boston: Houghton
Mifflin.
Hay, J. G. (1993). The biomechanics of sports techniques (4th ed.). Englewood Cliffs, NJ: Prentice-Hall.
Hay, J. G. (1988). Approach strategies in the long jump. International Journal of
Sport Biomechanics, 4, 114-129.
Hay, J. G. (1986). The biomechanics of the long jump. Exercise and Sports science
Hay, J. G., Thorson, E. M., & Kippenhan, B. C. (1999). Changes in muscle-tendon length during the take-off of a running long jump. Journal of Sports Sciences,
17, 159-172.
Hunter, J. P., Marshall, R. N., & McNair, P. (2004a). Interaction of step length and step rate during sprint running. Medicine & Science in Sports & Exercise, 36(2), 261-271.
Hunter, J. P., Marshall, R. N., & McNair, P. (2004b). Reliability of biomechanical variables of sprint running. Medicine & Science in Sports & Exercise, 36(5), 850-861.
Jaitner, T., Mendoza, L., & Schöllforn, W. I. (2001). Analysis of the long jump technique in the transition from approach to takeoff base on time-continuous kinematic data. European Journal of Sport Science, 1(5), 1-12.
Kakihana, W., & Suzuki, S. (2001). The EMG activity and mechanics of the running jump as a function of takeoff angle. Journal of Electromyography and
Kinesiology, 11(5), 365-372.
Lee, D. N., Lishman, J. R., & Thomson, J. A. (1982). Regulation of gait in long jumping. Journal of Experimental Psychology: Human Perception and
Performance, 8, 448-459.
Lee, D. N., & Reddish, P. E. (1981). Plummeting gannets: a paradigm of ecological optics. Nature, 293(24), 293-294.
Luhtanen, P., & Komi, P. V. (1973). Mechanical factors influencing running speed. In E. Asmussen and K. Jorgensen (Eds.), Biomechanics VI-B (pp. 23-29). Baltimore: University Park Press.
McGinnis, P. M., & Abendroth-Smith, J. (1989). Approach run variability in the pole vault. In C. J. Dillman, R. C. Nelson, B. M. Nigg, R. O. Voy, & M. M. Newsom (Eds.), Proceedings of the First IOC Congress on Sport Sciences (pp. 340-341). Colorado Springs, CO: U. S. Olympic Committee.
Montagne, G., Cornus, S., Glize, D., Quaine, F., & Laurent, M. (2000). A perception-action coupling type of control in long jumping. Journal of Motor
Behavior, 32(1), 37-43.
Oztop, E., Bradley, N. S., & Arbib, M. A. (2004). Infant grasp learning: a computational model. Experimental Brain Research, 158, 480-503.
Scott, M. A., Li, F.-X., & Davids, K. (1997). Expertise and the regulation of gait in the approach phase of the long jump. Journal of Sports Sciences, 15, 597-605. Seyfarth, A., Blickhan, R., & Van Leeuwen, J. L. (2000). Optimum take-off
techniques and muscle design for long jump. Journal of Experimental Biology,
203(4), 741-750.
Vishton, P. M., & Cutting, J. E. (1995). Wayfinding, displacements, and mental maps: Velocity fields are not typically used to determine one's aimpoint. Journal of
Experimental Psychology: Human Perception and Performance, 21(5), 978-995.
Wann, J. P. (1996). Anticipating arrival: Is the tau margin a specious theory? Journal
of Experimental Psychology: Human Perception and Performance, 22,
1031-1048.
Warren, W. H., Young, D. S., & Lee, D. N. (1986). Visual control of step length during running over irregular terrain. Journal of Experimental Psychology:
Human Perception and Performance, 12, 259-266.
Weyand, P. G., Sternlight, D. B., Bellizzi, M. J., & Wright, S. (2000). Faster top running speeds are achieved with greater ground forces not more rapid leg movements. Journal of Applied Physiology, 89(5), 1991-1999.