國
立
交
通
大
學
電信工程研究所
碩
士
論
文
OFDM 系統在 60 GHz 頻帶之非直視傳輸:
使用混合式陣列天線之 DoA 估計與定位
Non Line-of-Sight Transmission in 60 GHz OFDM Systems:
DoA estimation and Localization with hybrid antenna array
研究生:姚侑君
指導教授:吳文榕 博士
OFDM 系統在 60 GHz 頻帶之非直視傳輸:
使用混合式陣列天線之 DoA 估計與定位
Non Line-of-Sight Transmission in 60 GHz OFDM Systems:
DoA estimation and Localization with hybrid antenna array
研 究 生:姚侑君 Student:Yu-Chun Yao
指導教授:吳文榕 博士 Advisor:Dr. Wen-Wrong Wu
國 立 交 通 大 學
電信工程研究所
碩 士 論 文
A ThesisSubmitted to Institute of Communications Engineering College of Electrical and Computer Engineering
National Chiao Tung University In Partial Fulfillment of the Requirements
For the Degree of Master of Science
In
Communications Engineering July 2013
Hsinchu, Taiwan, Republic of China
OFDM 系統在 60 GHz 頻帶之非直視傳輸:
使用混合式陣列天線之 DoA 估計與定位
學生:姚侑君
指導教授
:吳文榕 博士
國立交通大學電信工程研究所碩士班
摘要
IEEE 802.15.3c系統是一適合高速之上網或高畫質之影音傳輸的規格,但操作的頻 段是在免執照的57 ~ 64 GHz 的頻段,由於此頻段通道對訊號有嚴重的路徑損失、反射 損失及其他衰減的問題。為了解決路徑損失這些問題,混合平面陣列天線(hybrid planar antenna arrays) 被 提 出 用 以 波 束 形 成 的 傳 輸 與 接 收 。 本 論 文 在 探 討 60GHz 系 統 中 LOS/NLOS之傳輸技術與多使用者環境的定位問題。首先,我們提出遞迴的波束搜尋法, 可快速且精確地搜尋出最佳的波束對。同時,我們針對環境須由NLOS變動成LOS提出 一偵測架構。最後,我們考量到多使用者環境中的定位問題。我們提出兩個方法分別為 角度法及座標法來估計使用者之間的相對位置。在已知使用者間的相對位置情況下,波 束形成可以進行用戶對及多個排程平行傳輸有效改善系統吞吐量。Non Line-of-Sight Transmission in 60 GHz OFDM Systems:
DoA estimation and Localization with hybrid antenna array
Student:Yu-Chun Yao
Advisor
:Dr. Wen-Wrong Wu
Institute of Communications Engineering
National Chiao Tung University
Abstract
IEEE 802.15.3c system offers data rates of multiple Gbit/s for applications such as high speed internet access or high quality video streaming and it is operated in unlicensed 57-64 GHz band. However, this band is suffering from high path loss, high penetration loss, and other problems. To alleviate the path loss problem, hybrid planar antenna arrays have been proposed for bemaformed transmission/receiving. In this thesis, we consider LOS/NLOS transmission technologies for 60GHz systems and the localization problem in the multiuser environment. First, we propose a recursive beam matching method, which can find the best transmit and receive beamforming pair. Then, we propose a sensing scheme that can detect the environment change from NLOS to LOS. Finally, we consider the localization problem in the beamformed multiuser environment. We propose two methods, the angle and coordinate method, such that the relative positions of users can be estimated. With the relative positions, beamforming can be conducted for user pairs and multiple parallel transmissions can be scheduled to enhance the system throughput.
誌謝
這篇論文的完成,首先要感謝我的指導教授吳文榕老師對我的指導,當我研究遇到瓶頸 時老師總是能給予我寶貴的建議與協助;在每周的 meeting 中與我討論研究問題,每每都讓我有 所收穫與突破。在研究的期間,同時也要感謝 Lab720 的學長姊、學弟妹們,在研究上能夠適時 提供幫助,在生活上能夠一起歡笑、一起成長。再來感謝的是我的家人,總是在我需要鼓勵時 給我溫暖,回家一趟就會讓我感覺幹勁十足。兩年碩士學生生活,謝謝一直在我身邊支持給我 鼓勵的人,謝謝你們。目錄
摘要 ... I ABSTRACT ... II 目錄 ... IV 圖目錄 ... VI 表目錄 ... VII 第一章: 簡介 ... 1 第二章:波束形成與 DOA 估計 ... 42.1 線陣天線(Uniform Antenna Array) ... 4
2.2 線陣天線的波束形成 ... 5 2.3 線陣天線的 DoA 估計 ... 7 2.3.1 線陣天線之 MUSIC 演算法 ... 7 2.3.2 線陣天線之 TLS-ESPRIT 演算法 ... 9 2.3.3 混合式線陣列天線之 MUSIC 演算法 ... 10 2.3.4 混合式線陣列天線之 TLS-ESPRIT 演算法 ... 13
2.4 平面陣列天線(Planar Antenna Array) ... 14
2.5 平面陣列天線的波束形成 ... 14 2.6 平面陣列天線的訊號抵達方位估計 ... 17 2.6.1 平面陣列天線之 MUSIC 演算法 ... 17 2.6.2 平面陣列天線之 TLS-ESPRIT 演算法 ... 19 2.6.3 混合式平面陣列天線之 MUSIC 演算法 ... 22 2.6.4 混合式平面陣列天線之 TLS-ESPRIT 演算法 ... 25 2.7 混合式平面陣列天線 DoA 之遞迴估計 ... 25 2.7.1 混合式平面陣列天線之遞迴 MUSIC 演算法 ... 26
2.7.2 混合式平面陣列天線之遞迴 TLS-ESPRIT 演算法 ... 27 第三章: LOS 與 NLOS 傳輸:估計與傳輸 ... 28 3.1 從 LOS 到 NLOS 之傳輸 ... 28 3.2 從 NLOS 到 LOS 之傳輸 ... 34 3.2.1 傳送端的能量分配 ... 35 3.2.2 接收端的干擾消除 ... 39 第四章: 混合式陣列天線使用者的相對位置估計 ... 43 4.1 二維的角度法-凸多邊形 ... 43 4.2 二維的座標法-凸多邊形 ... 45 4.3 二維的角度法及座標法-凹多邊形 ... 48 4.4 三維的座標法 ... 50 第五章: 模擬結果 ... 53 5.1 直視環境下的波束搜尋 ... 53 5.2 LOS 與 NLOS 的切換 ... 58 5.3 混合式陣列天線使用者位置估計 ... 60 5.3.1 二維角度法-凸多邊形 ... 60 5.3.2 二維角度法-凹多邊形 ... 61 5.3.3 二維座標法-凸多邊形 ... 63 5.3.4 二維座標法-凹多邊形 ... 66 5.3.5 三維座標法 ... 68 第六章: 結論與未來展望 ... 70 參考資料 ... 72
圖目錄
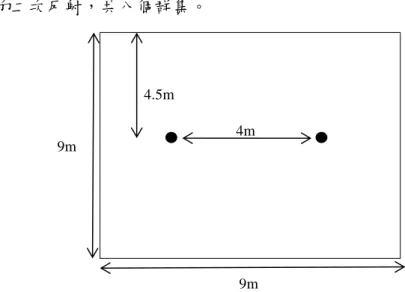
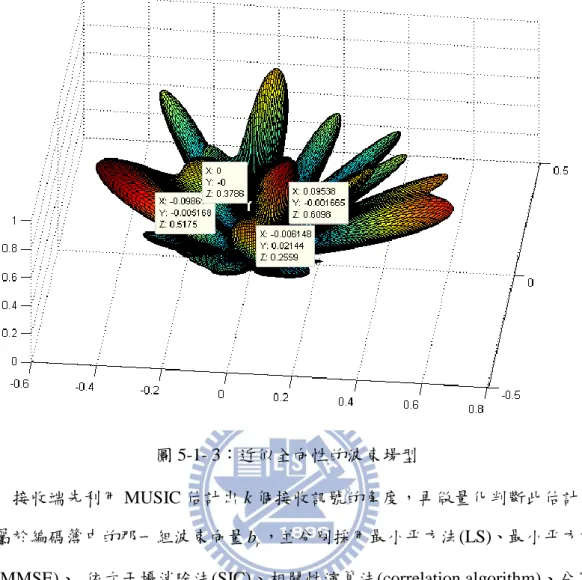
圖 2-1- 1:線陣天線架構圖 ... 4 圖 2-2- 1:線陣天線的數位波束形成架構 ... 6 圖 2-2- 2:線陣天線的混合式波束形成架構 ... 7 圖 2-4- 1:Nx乘 Ny個天線組成的平面陣列天線 ... 14 圖 2-5- 1:混合式波束形成架構圖 ... 16 圖 2-5- 2:8 8 平面陣列天線劃分成 4 個區塊分別是 A、B、C、D,每個區塊分享同一 個數位轉類比轉換器。 ... 16 圖 3-1- 1:波束搜尋流程圖 ... 29 圖 3-1- 2:最小平方法 ... 32 圖 3-2- 1:NLOS 與 LOS 切換示意圖 ... 35 圖 3-2- 2:NLSO 與 LOS 切換範例示意圖 ... 37 圖 3-2- 3:延伸的一維 LCMV 例子示意圖 ... 40 圖 4-1- 4:三個使用者估測 DoA 所建構出的三角形 ... 43 圖 4-3- 1:四個使用者在凹多邊形情況建構出的三角形 ... 48 圖 4-3- 2:凸多邊形與凹多邊形判斷流程圖 ... 49 圖 5-1- 1:傳送端與接收端位置俯視圖 ... 53 圖 5-1- 2:直視和三組一次反射的群集 ... 54 圖 5-1- 3:近似全向性的波束場型 ... 55 圖 5-1- 4:配對錯誤率( k=2 波束搜尋排序,T=5) ... 56 圖 5-1- 5:比較遞迴前與後的配對錯誤率( k=2,T=5) ... 57 圖 5-2- 1:接收波束場型 ... 58 圖 5-2- 2:LOS 利用 LCMV 消除 NLOS 干擾的波束場型 ... 59 圖 5-2- 3:NLOS 利用 LCMV 消除 LOS 干擾的波束場型 ... 59 圖 5-3- 1:角度法凸多邊形的均方誤差 ... 62 圖 5-3- 2:角度法凹多邊形的均方誤差 ... 63 圖 5-3- 3:座標法凸多邊形的均方誤差 ... 64 圖 5-3- 4:使用者為 3 時,角度法與座標法比較 ... 65 圖 5-3- 5:使用者為 4 時,角度法與座標法比較 ... 65 圖 5-3- 6:使用者為 5 時,角度法與座標法比較 ... 66 圖 5-3- 7:座標法凹多邊形的均方誤差 ... 67 圖 5-3- 8:使用者數為 4 時,座標法與多步驟座標法比較 ... 67 圖 5-3- 9:使用者數為 5 時,座標與多步驟座標法比較 ... 68 圖 5-3- 10:三維空間中,三個使用者位置構成的平面 ... 69 圖 5-3- 11:三維空間中,座標法的均方誤差 ... 69表目錄
表 3-1- 1:平面陣列天線的訓練序列數 ... 28 表 3-3- 1:HSI 實體層 MCS 相關參數 ... 34
第一章: 簡介
隨著無線的應用迅速發展,無線個人網路(wireless personal area network; WPAN)的效能大幅的提升,目前已能在短距離範圍內提很高傳輸率的服務,例 如IEEE所定義之WPAN資料傳其傳輸率最少是1Gbps,最高可達5Gbps,適合高 速之上網或高畫質之影音傳輸。由於毫米波(millimeter-wave)段的免執照頻寬很 寬,其相關技術受到重視且被用於IEEE的WPAN系統, IEEE 在2005 三月成立 了802.15 WPAN Task Group (TG3c) 發展毫米波的實體層規格。此毫米波是操作 在免執照 57 ~ 64 GHz 的頻段,由於此頻段通道對訊號有嚴重的路徑損失、反 射損失及其他衰減的問題,因此當傳送端與接收端之間有障礙物無法達到直視 (Line of Sight;LOS)的傳輸時傳收的效能將大受影響,如何在非直視(non-line of sight;NLOS) 的環境下能夠正常運作是此一技術的重大關鍵。 波束形成(beamforming)為有效改善NLOS傳輸問題的方法之一,因此有研究 者提出在傳送端與接收端使用陣列天線(antenna array)而能做波束形成[1]-[3],希 望可以藉此達到能量集中提高傳輸效能,能量集中並不侷限於單一方位,陣列天 線波束形成技術可以把訊號集中在多個特定方位,也可以使某些特定方位收不到 訊號。波束形成可以用類比或數位的方式來實現,如用類比的方式則無法達到干 擾消除的目的,但如用數位的方式則每一根天線都需要一組數位類比轉換器 (digital-to- analog circuit; DAC)和類比數位轉換器(analog-to-digital circuit; ADC), 成本會大大的提高,最近有研究者提出用混合式的波束形成(hybrid beamforming) 來解決此問題,其想法是把陣列天線分成少許區塊,同一區塊共同使用同一個轉 換器,如此一來就可在效能與成本之間取得一平衡。使用波束形成之一重要的前 提是訊號的接收方位須能準確的估計,此問題在文獻上稱之為(direction of Arrival; DoA),數位波束形成之DoA的問題已經廣泛的被討論[4][5],最近也有研究者提 出應用在混合式陣列天線的DoA估測演算法。
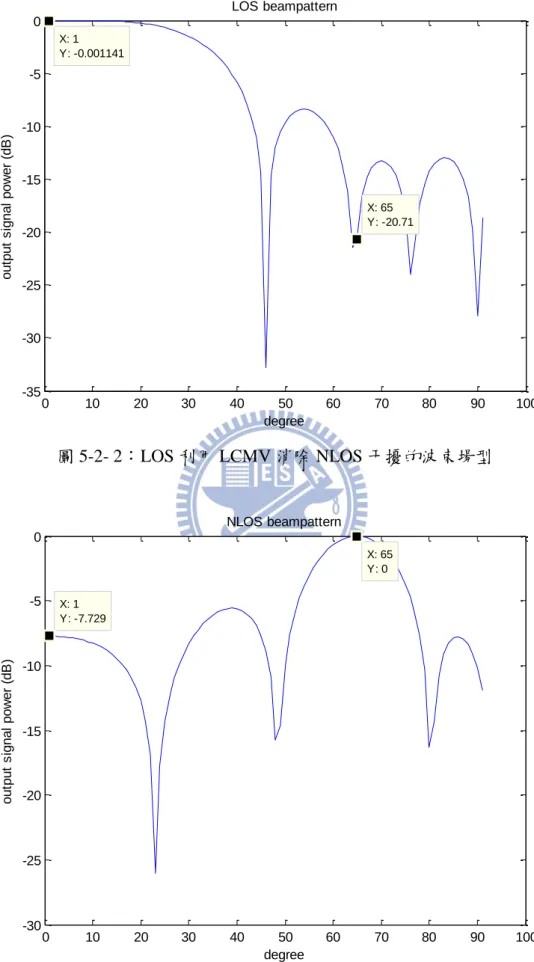
本篇論文的目的即是研究 60GHz 系統中使用混合波束形成之 LOS/NLOS 傳輸技術及多使用者之間的定位。首先考慮環境在變動時波束配對的問題,亦即 傳輸環境可能瞬間從 LOS 變為 NLOS 的狀況,或者也可能從 NLOS 變回成 NLOS, 我們首先考慮第一種狀況,一開始先做傳送與接收訊號的 DoA 估計,接著做波 束搜尋流程時,根據每組波束配對收到的訊號大小,依序排列出最佳、次佳... 等的序列,再依照當時的環境選擇最適當的一組波束配對,例如一開始採用最佳 的波束配對,但當此組波束配對被阻礙物擋住訊號無法傳遞時,改採用次佳的波 束配對。接者我們考慮輸環境由 NLOS 切換成 LOS 的情況,我們所提出的方法 是在傳送端和接收端在 NLOS 傳輸的過程中,LOS 同時保留一能量較小的波束 形成用於偵測 LOS 是否可以進行資料傳輸。但在傳送端會有能量分配的問題, 在接收端的則會有兩波束形成相互干擾的問題,我們參考 IEEE 802.15.3c 規格書 [7]中接收端靈敏度(receive sensitivity)來做傳送功率的分配,並且提出延伸的二維 線性限制最小變異量(linear constrained minimum variance, LCMV)演算法來消除 干擾。
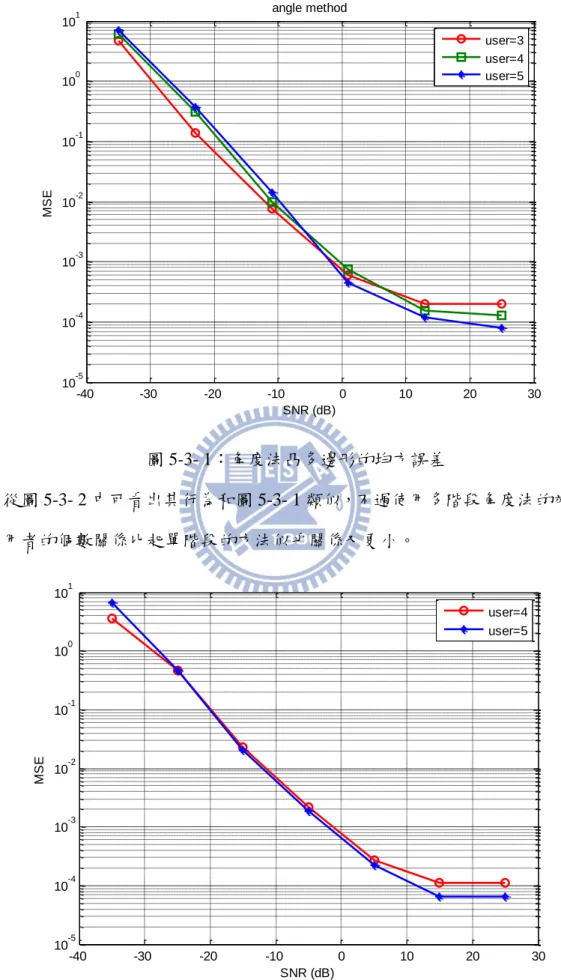
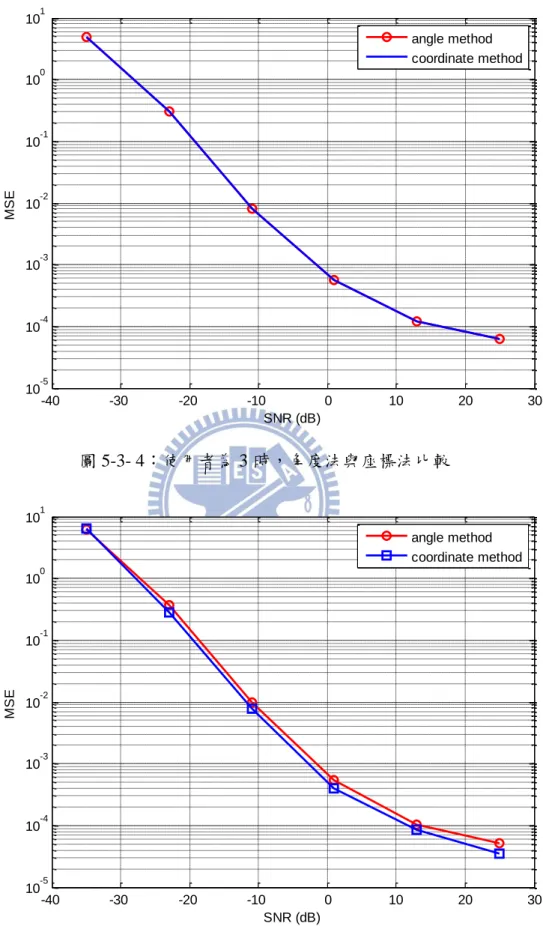
為了因應 WPAN 的網路環境,IEEE802.15.3 定義了微網(piconet)為網路的基 本架構,微網系統主要針對大約 10 公尺範圍的個人網路,微網允許多個獨立的 網路裝置彼此能夠相互溝通且可移動。本論文的另外一個主題就是探討在多個使 用者傳輸環境中,我們如何估計多個使用者間的相對位置,如果使用者的相對位 置可以知道,使用波束形成就可以做使用者之間的平行傳輸,透過適當的排程可 以大幅的提高整體網路的傳輸率。現有使用者定位的方法有很多種,但都是為了 找到使用者之間的方位及距離而設計[16],也就是估計使用者間的絕對位置,不 但困難而且有很多限制,我們提出一個的做法可以簡單有效的估得使用者間的相 對位置,我們假設每個使用者都具備有混合式的陣列天線及估計 DoA 的能力, 因此可以估計出其它使用者的方位,透過幾何的關係我們發展了兩個估計的方法: 角度法(angle method)及座標法(coordinate method)。
第三章中敘述 LOS 與 NLOS 之下的路徑切換方法,第四章討論利用混合式的平 面陣列天線多使用者相對位置的估計,第五章是討論敘述所提出方法之模擬結果, 第六章則是總結。
第二章: 波束形成與 DoA 估計
2.1 線陣天線(uniform antenna array)
一個典型的線性陣天線的架構如圖 2-1- 1 所示: 圖 2-1- 1:線陣天線架構圖 假設有 K 個期望值是零、彼此不相干而且是窄頻的訊號入射到有 N 根天線 的線陣天線上,入射到線陣天線的角度分別是θ{ , 1 2, ,K},k[0 ~ 180 ] , 而且 KN。此陣列的 N 個單一天線彼此相距離 d,而且 d 剛好是頻率是 f 的弦c 波的半波長。線陣天線接收到的訊號可以看成一個向量y,其數學模型可以表示 如下: d ● ● ● ● ● ● ● ● ● ● ● ● θk d*sinθk d
1 2 1 1 2 2 1 2 ( ) ( ) ( ) N K K K y n y n n y n s n n n s n n n s n n n n n y a a a As n (2.1) 其中 2 sin( ) / 2 ( 1) sin( ) / ( ) 1 j f dc k C j fc N d k C T k e e a 是一個操控向量(steering vector),n(n)是期望值為零的複數相加性高斯白雜訊向量。2.2 線陣天線的波束形成
線陣天線的波束形成可以分成:類比波束形成、數位波束形成及混合式波束 形成。首先我們介紹線陣天線的類比波束形成,類比的波束形成場型(analog beamforming pattern)可表示為: 0 [( 1)sin ] [( 1)sin ] 1 ( ) N j m j m m RF e e
(2.1) 場型RF( ) 的物理意義是說把接收天線擺放在遠區(far zone)所接收到的訊號振 幅。由於線陣天線的每一個天線都有一個自己的移相器(phase shifter),移相器用 來調整每一根天線所發射出去訊號的相位,因此我們可以適當的調整欲接收或傳 送的相位0使得RF( ) 可以在某個特定方位有最大的強度。數位波束形成場型(digital beamforming pattern)可以表示為:
0 [( 1)sin ] [( 1)sin ] 1 ( ) N j m j m m DF k e e
(2.3) 線陣天線的數位波束形成與類比波束形成最大的差別在於數位波束形成的每根 天線都各自配一個 DAC 或 ADC。透過在 DAC 或 ADC 之前調整訊號的相位和 振幅,可以決定想要傳送或接收的訊號方向。而可以調整振幅與相位的原因是每一根天線都接著數位轉類比轉換器,我們可以在數位端做振幅跟相位之調整,雖 然類比的波束形成也可以也類似的功能,但精準度及彈性遠不及數位的波束形成。 線陣天線的數位波束形成架構如下圖 2-2- 1 所示: 圖 2-2- 1:線陣天線的數位波束形成架構 可以同時調整振幅與相位的數位波束形成有一個很大的優點,它可以使在特 定方位的接收天線收不到訊號並且在另外一個特定方位的接收天線接收到的訊 號強度是最大,也就是說可以作干擾消除以及訊號聚焦。
混合式波束形成是由不同的區塊(section)分享共同的 DAC 和 ADC,每一天 線配有一移相器可以控制訊號的相位。此種做法可以把 DAC 和 ADC 的數量大 幅降低,藉以節省硬體成本。另外我們也可以使用混合的波束形成,利用類比的 權重調整相位,數位的權重調整振幅。混合式波束形成架構如圖 2-2- 2 所示: ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● ● θk ADC ADC ADC ADC
Digital beamforming weight
● ● ● ● ● ● ● ●
圖 2-2- 2:線陣天線的混合式波束形成架構
2.3 線陣天線的 DoA 估計
首先我們介紹一些傳統的 DoA [4][5],之後再敘述適用於混合式陣列天線訊 號之 DoA 估計。我們要做方位估測是因為在做波束形成之前,需要知道訊號的 傳收方向,值得注意的是 DoA 只能決定訊號之接收方向,如果我們假設通道是 是可逆的(Reciprocal),那麼最好的接收方向也將是最好的傳送方向,因此接收端 照著 DoA 所估出的方向發射訊號就可以讓傳送端收到最強的訊號。2.3.1 線陣天線之 MUSIC 演算法
式子(2.1)中y的協方差矩陣(covariance matrix)為: ● ● ● ● ADC ● ● ● ● ADC ● ● ● ●Digital beamforming weight
2 0 [ ] [ ] [ ] 1 n P m m m E n n E n n E n n P
H y H H H H s H R y y A s s A n n AR A I y y (2.4) 其中R 為s s的協方差矩陣,I是單位矩陣對角為 2 n , N N C H s AR A 是一個秩 (rank)為 K 的矩陣,這是因為每一個訊號是不相關而且矩陣A的列向量(columnvector)互相獨立並且R 是一個滿秩(full rank)矩陣。我們可以使用s yy 的時間平H
均來估計Ry,在雜訊為高斯分布下這樣的估計是最大似然。更進一步來把Ry做 SVD 分解我們可以得到:
H s s y s n H n n Σ 0 U R U U 0 Σ U (2.5) 其中Σ 與s Σ 為對角矩陣,n K K R s Σ 、 2 2 ( ) ( ) Diag{ , , } N K N K n n n R 。從以 上觀察,我們可以得到下面結論: span( )=span( ) span( )span( ) s n A U A U (2.6) 令enU 是n Ry的特徵向量(eigenvector),我們可以得到: 2 2 2 ( ) n n n H H n y n n n n H H n s n H s e (R - )e e e e 0 e AR A e v R v (2.7) 其中 H nv = A e。因為R 是正定矩陣(positive definite matrix),我們得到s H
s v R v 0, 所以 H n v = A e = 0。從以上討論,我們可以看出a( ), θ,跟特徵向量e 垂直,n 然後我們可以由以下數學計算得到: 1
其中a( ) 是操控向量。然而在我們真正執行 DoA 計算之前,我們需要估計有多 少個不同方向的訊號入射到線陣天線。我們假設所有天線的雜訊功率都相等而且 KN,我們可以重新排列Ry的特徵值(eigenvalue)由大排到小,也就是說 1 2 N 0 。若SNR 0時,且不同方向的訊號源共有K個,則我們可以假 設得到 2 1 2 K K N n 。
2.3.2 線陣天線之 TLS-ESPRIT 演算法
MUSIC 演算法需要高複雜度的搜尋,而 ESPRIT 演算法[4]改良天線排列的 幾何圖形,讓我們不需要很複雜的搜尋。ESPRIT 演算法把線陣天線分成兩個子 線陣天線。或者從數學上等價的角度,我們可以把它看成是做適當的行(row)交 換來做訊號來源方位估計。 我們把式子(2.1)中y做適當的行交換,數學模型可以改寫為:
1 3 1 2 4 N N y n y n y n n n n y n y n y n A y s n AΦ (2.9)其中ΦDiag{e-j2 f sin(c 1) /C, ,e-j2 f sin(c K) /C}。跟之前一樣的做法,我們找出 y 的協 方差矩陣如下: 2 n H H H y s s s s n n n A A R R I U Σ U + U Σ U AΦ AΦ (2.10) 接下來我們推導 EPRIT 演算法找出如下:
2 , , 2 1 , , 2 1 , , 2 1 , min min min min 1 1 1 1 s A Φ T s2 F s A Φ T s2 F s B Φ T s2 F s2 s Φ T F U A T AΦ U U AT ATT ΦT U U B BT ΦT U U U T ΦT (2.11) 其中 1 s U 、 2 s U 分別為Us 的上下兩半部。由最小平方誤差(least-square; LS)我們可 以得到: 1 1 2 † s s T ΦT U U (2.12) 我們要求的方向Φ即為 1 2 † s s U U 的特徵值。利用最小平方誤差求得的Φ是有偏差的, 這是由於雜訊或時間平均的影響造成的誤差使得 1 2 s s span(U )span(U )。我們可以 使用全部最小平方法(total-least-square; TLS),利用最小的校正量來解決此問題, 使得 1 2 s s span(U )=span(U ),解出來的解即為: 1 -1 12 22 T ΦT V V (2.13) 其中 1 2 1 1 2 2 H H H s 11 12 11 2 s s H H H 21 22 1 22 s U V V V V U U Λ V V V V U (2.14) 我們要找的方向Φ就是 -1 12 22 V V 的特徵值。2.3.3 混合式線陣天線之 MUSIC 演算法
在混合式陣列天線中,由不同的區塊分享共同的 DAC 和 ADC,而對第 i 格 區塊在某一個時間點接收到的訊號為:
H
i i i i y n u As n n n (2.15) 其中u 為一個操控向量,由各種相位所構成: i ,1 ,2 ,1 ,2 , , , 1 i i i i i i N i N u u u u u u u (2.16) 因為此時線陣天線收到的值,在u 的投影下只剩下一維的資訊,無法用傳統的i DoA 估計角度。所以一個簡單的方式是蒐集更多時間點的訊號,每個時間點採 用不同的u ,以取得更多軸的資訊來估計角度。假設現在共蒐集了 T 個時間,i T<N,則形成一操控矩陣(steering matrix):
,1 ,2 , , rank i i i i i N T u u U U u (2.17) 在 T 個時間中觀察到的訊號會形成一個向量:
1 1 i i i i H i i y n y n n y n T n n y U A s n (2.18) 蒐集所有區塊的訊號,假設共有 M 組區塊,可形成一組新的向量:
1 2 1 1 1 2 2 2 M H H H H H H M M M n n n n n n y y y y U A U U A U s n U A U (2.19)其中 1 2 1 sin 1 2 1 sin 0 0 0 0 , i=1~M 0 0 k j f i Nd i j f i Nd e e A A (2.20) 式(2.18)的y的協方差矩陣為:
1 1 1 1 2 2 2 2 2 [ ] H H H H n H H M M M M E n n H y H s R y y U A U A U A U A R I U A U A (2.21) 更進一步來把Ry做 SVD 分解我們可以得到:
H s s y s n H n n Σ 0 U R U U 0 Σ U (2.22) 從上面的討論我們可以得到下列之特性: 1 1 2 2 sapn( ) span( ) H H H M M n U A U A U U A (2.23) 因此我們可以從以下數學式子找出 ( )k :
1 max PMUSIC( ) H H n n a U U a (2.24)
1 2 sin 2 2 1 sin H j f Nd H j f M Nd H M e e U a U a a U a (2.25)2.3.4 混合式線陣天線之 ESPRIT 演算法
從上面的討論我們可以得到下列之特性: 1 1 2 2 span( ) span( ) H H H M M s U A U A U U A (2.26) 因此我們可以利用 ESPRIT 演算法解Φ 與x Φy,推導如下:
2 1 1 2 2 , 2 , , 2 1 , , 2 1 , min min min min H H H M M 1 1 1 s U T s B Φ T s2 F s B Φ T s2 F s2 s Φ T F U A U A U T U A U B T BΦ U U BT BTT ΦT U U U T ΦT (2.27) 其中 1 s U 與 2 s U 是U 的上下半部。由 LS 法我們可以得到: s 1 y 1 2 † s s T Φ T U U (2.28) 我們要求的方向Φ即為 1 2 † s s U U 的特徵值。然而由最小平方誤差求得的Φ是有偏差 的最佳解,這是因為雜訊的影響或者時間平均造成的誤差,使得 1 2 s s span(U )span(U )。我們可以使用 TLS 演算法,利用最小的校正量,使得 1 2 s s span(U )=span(U ),所得的解為: 1 -1 12 22 T ΦT V V (2.29) 其中 1 2 1 1 2 2 H H H s 11 12 11 2 s s H H H 21 22 1 22 s U V V V V U U Λ V V V V U (2.30)我們要找的方向Φ就是 -1 12 22
V V 的特徵值。
2.4 平面陣列天線(Planar Antenna Array)
平面陣列天線[9]是由許多相同的天線所組成,天線排列方式一般是成矩形, 如圖 2-1-1 所示,每一個圓點都代表著一個天線。我們定義平面陣列天線的長跟 寬分別是在 x 軸與 y 軸,在 x 軸上面的天線每個相距離d ,在 y 軸上面的天線x 每個相距離dy,d 與x dy都是 2 ,令此陣列共有NxNy個天線。同樣的,平面陣 列天線的每一個元件都有一個自己的移相器,用來調整每一根天線所發射出去訊 號的相位。 y d x d (0,0) (Nx-1,0) (Ny-1,0) (Nx-1,Ny-1) x y Isotropic radiator 圖 2-4- 1:Nx乘 Ny個天線組成的平面陣列天線
2.5 平面陣列天線的波束形成
平面陣列天線的類比波束形成場型可表示為: ( 1) ( 1) , 1 1 ( , ) y x y x N N j n j m m n m n RF w e e
(2.31) 0 0 0 0[( 1)sin cos ( 1)sin sin ] ,
j m n
m n
sin cos 2 2 sin cos x (2.33) sin sin 2 2 sin sin y (2.34) 場型 的物理意義是說把接收天線擺放在遠區所接收到的訊號振幅。我們 可以藉由移相器適當的調整相位
0, 0
使得 可以在某個特定方位有最 大強度。 平面陣列天線的數位波束形成場型[10]可表示為: ( 1) ( 1) , 1 1 ( , ) y x x x N N j m j n m n m n DF w e e
(2.35) 0 0 0 0 1 1 1 1[( 1)sin cos ( 1)sin sin ] [( 1)sin cos ( 1)sin sin ]
, 0 1 j m n j m n m n w e e (2.36) sin cos 2 2 sin cos y (2.37) sin sin 2 2 sin sin y (2.38) 數位波束形成最大的優點在於可以同時調整振幅與相位,也就是說可以做干擾消 除。例如我們想要往( , ) 0 0 方位發射訊號並且使得在( , ) 1 1 方位的接收機收不到 往( , ) 0 0 發射的訊號。則我們只需要讓wm n, 滿足下列方程式: 0 0 0 1 0 0 0 0 1 1 1 1 1 1 ( , ) ( , ) 1 ( , ) ( , ) 0 RF RF RF RF (2.39) 0 0 0 0
[( 1)sin cos ( 1)sin sin ] [( 1)sin cos ( 1)sin sin ] 0 0 0 ( , ) y x N N j m n j m n m n RF e e
(2.40) 1 1 1 1[( 1)sin cos ( 1)sin sin ] [( 1)sin cos ( 1)sin sin ] 1 0 0 ( , ) y x N N j m n j m n m n RF e e
(2.41) 上列數學式子所代表的意義是,數位波束先形成到兩個不同的方位,然後解數位 ( , ) RF ( , ) RF 的權重使得某一特定方位可以接收到最大能量,另一方位則為零。由上列數學式
子也可以看出wm n, 振幅跟相位會隨著m n, 改變而改變。
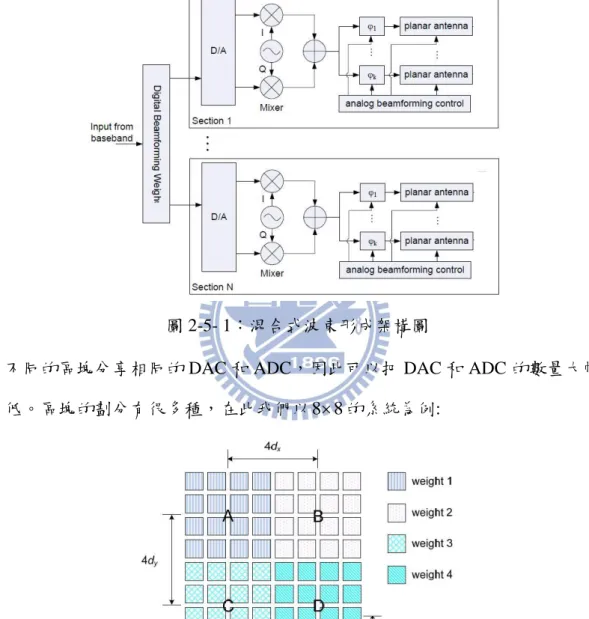
由於 DAC 和 ADC 的成本比較高,如果我們可以使用比較少的 DAC 和 ADC [1]-[3],就可以節省成本。混合式波束形成的平面陣列天線架構如下圖所示:
圖 2-5- 1:混合式波束形成架構圖
由不同的區塊分享相同的 DAC 和 ADC,因此可以把 DAC 和 ADC 的數量大幅
降低。區塊的劃分有很多種,在此我們以 8 8 的系統為例:
圖 2-5- 1: 8 8 平面陣列天線劃分成 4 個區塊分別是 A、B、C、D,每個區塊分
享同一個數位轉類比轉換器。 混合式波束形成的場型可表示為:
1 section1 2 section2 3 section3 4 section4 ( , ) ( , ) ( , ) ( , ) ( , ) BP w RF w RF w RF w RF (2.42) 其中每個區塊的場型: 4 4
[( 1)sin cos ( 1)sin sin ]
section1 section1 ,
1 1
4 4
4 (sin sin ) [( 1)sin cos ( 1)sin sin ]
section2 section2 , 1 1 4 (sin cos ) [ section3 section3 , ( , ) ( , ) ( , ) j m n m n m n j j m n m n m n j j m n RF w e RF e w e RF e w e
4 4( 1)sin cos ( 1)sin sin ]
1 1
4 4
4 (sin cos ) 4 (sin sin ) [( 1)sin cos ( 1)sin sin ]
section4 section4 , 1 1 ( , ) m n m n j j j m n m n m n RF e e w e
(2.43) 每個區塊的天線權重為: sec 1 , sec 2 , sec 3 , sec 4 , section1 , section2 , section3 , section4 , tion m n tion m n tion m n tion m n j m n j m n j m n j m nw
e
w
e
w
e
w
e
(2.44) 在混合式波束形成中,假如要往( , ) 0 0 方位發射訊號,同時讓( , ) 1 1 方位的天線 收不到訊號的話,w1~w 須滿足下列方程式: 4 1section1 0 0 section2 0 0 section3 0 0 section4 0 0 2
section1 1 1 section1 1 1 section1 1 1 section1 1 1 3
4 ( , ) ( , ) ( , ) ( , ) 1 ( , ) ( , ) ( , ) ( , ) 0 w RF RF RF RF w RF RF RF RF w w (2.45)
2.6 平面陣列天線的 DoA 估計
2.6.1 平面陣列天線之 MUSIC 演算法
平面陣列天線的 MUSIC 演算法可以由線陣天線的 MUSIC 演算法加以延伸 而得,他們主要的差別是在於線陣天線只搜尋一個角度,而平面陣列天線是要搜尋兩個角度。平面陣列天線的 DoA 估計是估計三維空間的方位,平面陣列天線 的 DoA 估計需要估計兩個角度,一個是垂直角,另外一個是水平角 平面陣列天線收到的訊號y可以排成一個向量,它的數學模型表示如下
1 2 x y N N y n y n n n n y n y As n (2.46) 此時: 1 1 1 12 sin( ) cos( )/ 2 ( 1) sin( ) cos( )/
2 sin( )sin( )/ 2 ( 1) sin( )sin( )/
vec( ( , ) ( , )) vec( ( , ) ( , )) ( , ) 1 ( , ) 1 c x k k c x k k c y k k c y k k y x y K K x K K T j f d C j f N d C x k k T j f d C j f N d C y k k e e e e A a a a a a a (2.47) 是克羅內克積(kronecker product)。vec(.)是一個把矩陣的列(column)排成一整列 向量的函數。 y的協方差矩陣可表示為:
2 0 [ ] [ ] [ ] 1 n P m m m E n n E n n E n n P
H y H H H H s H R y y A s s A n n AR A I y y (2.48) 更進一步來把Ry做 SVD 分解可得:
y H s n s s n H n n Σ Σ 0 U R U U 0 Σ U (2.49) 跟 2.3.1 節一樣的分析,我們可以得到: span( ) span( ) span( ) span( ) s n A U A U (2.50) 然後我們可以由以下數學計算得到與:2.6.2 平面陣列天線之 TLS-ESPRIT 演算法
平面陣列天線的 DoA 估計也可以適當的分成兩個子平面陣列天線,或者從 數學上的等價,我們可以把接收到的訊號做適當的行交換,來找出方位,跟線陣 天線不同的是我們需要做兩次行交換,解出兩個角度,並且要配對,因為假設垂 直角解出來有 30 度跟 60 度,水平角解出來有 0 度跟 180 度,那真正的方位是垂 直角 30 度必須配水平角 0 度還是配水平角 180 度?在接下來的推導可以得到答案。我們先解出{y1, ,yK}也就是{sin( )sin( ),1 1 ,sin(K)sin(K)},其中k是第 k 個
訊號源的垂直角,k是第 k 的訊號源的水平角。利用 span( )A span(Us) (2.52) 做更進一步的推導: 1 1 1 1 1 1 1 1 1 2 2 1 1 , ,
2 sin( )sin( )/ 2 sin( )sin( )/
1 1
,
( ) 2 sin( )sin( )/ ( ) 2 sin( )sin( )/
min min min x xK c y c y K K x xK y c y y c y K K x xK j f d C j f d C N j f d C N j f d C e e e e s s A T A T s A T U AT E U E AT a a a a E U E a a 1 1 1 1 1 1 1 1 1 1 2
2 2 sin( )sin( )/ 2 2 sin( )sin( )/
1 1 2 sin( )sin( )/ 1 2 sin( )sin( )/
, 3 2 sin( )sin( )/ 3 min x xK c y c y K K x xK c y c y K K x xK c y x j f d C j f d C j f d C j f d C j f d C e e e e e e F s A T T a a a a E U a a a
2 2 sin( )sin( )/ 2 2 1 , , , , 2 2 1 1 , , , min min min min c y K K xK j f d C 1 1 1 1 F s s A Φ T A Φ T s2 F s2 F s s2 s B Φ T Φ T F s2 F T a U A U AT T U AΦ U ATT ΦT U B U U T ΦT BT ΦT U (2.53)其中 2 sin(1)sin(1) / 2 sin( )sin( ) / Diag{ j f dc y C, , j f dc y K K C} e e Φ , 1 s U 、 2 s U 分別為E U 的1 s 上下半部,E 為行交換矩陣。 1 如此一來,我們可以得到: 1 -1 12 22 T ΦT V V (2.54) 其中 1 2 1 1 2 2 H H H s 11 12 11 2 s s H H H 21 22 1 22 s U V V V V U U Λ V V V V U (2.55)
我們就解出了 2 sin(1)sin(1) / 2 sin( )sin( ) /
Diag{ j f dc y C, , j f dc y K K C} e e Φ 為 -1 12 22 V V 的特徵 值。 接著我們用另外一種行交換方式解出{x1, ,xK}也就是 1 1
{sin( ) cos( ), ,sin(K) cos(K)},推導如下:
1 1 1 1 1 1 1 1 1 2 2 2 2 , ,
2 sin( )sin( )/ 2 sin( )sin( )/ 2 2
,
( ) 2 sin( )sin( )/ ( ) 2 sin( )sin( )/
min min min x xK c y c y K K x xK y c y y c y K K x xK j f d C j f d C N j f d C N j f d C e e e e s s A T A T s A T U AT E U E AT a a a a E U E a aa 1 1 1 1 1 1 1 1 1 1 2
2 2 sin( ) cos( )/ 2 2 sin( ) cos( )/ 2 1 2 sin( ) cos( )/ 1 2 sin( ) cos( )/ , 3 2 sin( ) cos( )/ 3 min y yK c y c y K K y yK c y c y K K y yK c y y j f d C j f d C j f d C j f d C j f d C j e e e e e e F s A T T a a a a E U a a a 2 2 sin( ) cos( )/ 2 2 1 , , , , 2 1 , , , min min min min c y K K yK f d C 1 1 1 F s s A Φ T A Φ T s2 F s2 F s s2 B Φ T Φ T s2 F T a U A U AT T AΦ ATT ΦT U U U B U BT ΦT U 2 1 U T ΦTs1 F
其中 2 sin(1)cos(1) / 2 sin( )cos( ) / Diag{ j f dc y C, , j f dc y K K C} e e Φ , 1 s U 、 2 s U 分別為E U 的2 s 上下半部,E 為行交換矩陣。 2 如此一來,我們可以得到: 1 -1 12 22 T ΦT V V (2.57) 其中 1 2 1 1 2 2 H H H s 11 12 11 2 s s H H H 21 22 1 22 s U V V V V U U Λ V V V V U (2.58)
我們就解出了 2 sin(1)cos(1) / 2 sin( )cos( ) /
Diag{ j f dc y C, , j f dc y K K C} e e Φ 為 -1 12 22 V V 的特 徵值。 接下來我們要配對Φ跟Φ,從以上的觀察我們發現 2-1 11 2 -V V 跟 -1 11 22 -V V 有相同的 特徵向量T,把相同的特徵向量所對應個別的特徵值配對起來,就是我們要的配 對方式。配對完後我們要把Φ跟Φ 轉換到k跟k,方法是我們取出 2 c ysin(k)sin(k) / j f d C k e 跟 j2 f dc ysin( k)cos(k) /C k e 的相位,相除得到 tank,此時的
做 tan 的反函數得到兩個可能的k,把這兩個帶回 j2 f dc ysin( k)sin( k) /C
e 跟 2 c ysin( k)cos(k) / j f d C e ,會發現只有一組 ( , ) k k 滿足 j2 f dc ysin(k)sin( k) /C k e 跟 2 c ysin(k)cos(k) / j f d C k e ,及解得我們要的相位。 我們可以從幾何意義上來看我們所做的兩次行交換把接收到的訊號排成向 量y換成y1 E y 與1 y2 E y ,如下圖所示。2 y所對應的天線座標為: y y [(0, 0) (1, 0) (0,1) (1,1) (0,N -1) (1,N -1) (Nx1,Ny1)]T 也就是說y即順著 x 軸方向照順序排成一個向量。y 所對應的天線座標為: 1 [(0, 0) (1, 0) (0,3) (1,3) (0,2) (1,2) (0, 4) (1,4) ]T
也就是說把 x 軸方向的奇數次序(order)先排,再來排 x 軸方向的偶數次序。y 所2 對應的天線座標為: [(0, 0) (0,1) (3, 0) (3,1) (2,0) (2,1) (4, 0) (4,1) ]T 即把 y 軸方向的奇數次序先排,再來排 y 軸方向偶數次序。
2.6.3 混合式平面陣列天線之 MUSIC 演算法
圖 2-5-2 的區塊 A 的天線共同用一個 ADC,也就是說 A 區塊的所有天線接 收到的訊號經過移相器後,在經過 ADC 器之前需要把它們加起來。所以區塊 A 的 ADC 的輸出數學模型是:
A A y n ur n (2.59) 其中r是區塊 A 的所有天線接收到的訊號所排成的向量,u是區塊 A 每根天線 經過移相器後所位移的相位,t代表著時間,我們先讓相位位移向量u不隨時間 改變。 我們把區塊 A~D 的天線,相對位置一樣的天線讓它們經過移相器後所位移 的相位相同,也就是對於不同的區塊,u都相同:
B B C C D D y n n y n n y n n ur ur ur (2.60) 我們把四個區塊的數位類比轉換器的輸出排成一個向量:
A A A B B B C C C D D D A A x A y A x y y n n n y n n n n y n n n y n n n n ur uA s ur uA s y ur uA s ur uA s uA uA Φ s uA Φ uA Φ Φ (2.61) 其中 1 1 1 1 vec( ( , ) ( , )) vec( ( , ) ( , )) A y x y K K x K K A a a a a T,2 sin( )cos( ) / 2 ( 1) sin( )cos( ) /
( , ) 1 j f dc x k k C j fc Nx dx k k C x k k e e T a , 2 ( 1) sin( )sin( ) / 2 sin( )sin( ) / ( , ) 1 j f dc x k k C j fc Ny dx k k C y k k e e
T a , c 1 1 c4 -j2 f sin cos / 4 -j2 f sin cos /
Diag{e d C, ,e d K K C} x Φ c 1 1 c
4 -j2 f sin sin / 4 -j2 f sin sin /
Diag{e d C, ,e d K K C} y Φ 那麼y的協方差矩陣為:
[ ] A A A x A x s A y A y A x y A x y E n n H y H H s n s n s n n R y y uA uA uA Φ uA Φ R uA Φ uA Φ uA Φ Φ uA Φ Φ Σ Σ 0 U U U U 0 Σ (2.62) 從上面數學式子的觀察我們得到: span( ) span( ) A A x A y A x y s uA uA Φ U uA Φ uA Φ Φ (2.63)span( ) span( ) A A x A y A x y n uA uA Φ U uA Φ uA Φ Φ (2.64) 上面的推導u是1 16 的向量,代表著我們只利用一種相位位移,並且此時y 的維度是四,如果時間允許的話,我們可以多等幾個符元時間(symbol time),每 個符元利用不同的相位位移,來增加y的維度。例如我們利用兩個符元時間,其 中一個符元的數位類比轉換器輸出是yA1 u r 另一個符元的輸出是1 A1 yA2 u r ,2 A2 考慮四個區塊 A~D,則接收向量的維度從四增加到八,最多可偵測的方向從三 增加到七,這時y[yA1 yA2 yB1 yB2 yC1 yC2 yD1 yD2]T。 因此Ry可以改寫成:
[ ] A A A x A x s A y A y A x y A x y E n n H y H H s n s n s n n R y y UA UA UA Φ UA Φ R UA Φ UA Φ UA Φ Φ UA Φ Φ Σ Σ 0 U U U U 0 Σ (2.65) 從上面數學式子推論: span( ) span( ) A A x A y A x y s UA UA Φ U UA Φ UA Φ Φ (2.66) span( ) span( ) A A x A y A x y n UA UA Φ U UA Φ UA Φ Φ (2.67)1 & rank( ) n n u U U u (2.68) 利用類似於 3.61 章節的方式,可以從以下數學式子找出 ( , ) k k : , 1 max ( , ) ( ( ( , ) ( , ))) ( ( ( , ) ( , ))) MUSIC y x y x P H H H n n U a a U U U a a (2.69) 要注意的是我們選擇的 U 不能跟vec(ay( , ) ax( , )) 垂直,選法是不要讓 U 的 相位有一定的規律。
2.6.4 混合式平面陣列天線之 TLS-ESPRIT 演算法
從上面的討論我們可以得到下列之特性: span( ) span( ) A A x A y A x y s UA UA Φ U UA Φ UA Φ Φ (2.70) 我們可以利用 ESPRIT 演算法解Φ 與x Φy,代入利用 3.6.2 章節的方式,此時原 本的 A 為: A A x A y A x y UA UA Φ A UA Φ UA Φ Φ (2.71) 即可解得我們要的相位。2.7 混合式平面陣列天線 DoA 之遞迴估計
由於 DoA 容易產生不精確的方位估計,因此我們提出混合式平面陣列天線估計,來改善因為 DoA 估計不準確的情況。
2.7.1 混合式平面陣列天線之遞迴 MUSIC 演算法
首先,在完成一次的 MUSIC 演算法後,可以得到訊號抵達方位一個是垂直 角1,另外一個是水平角1。有了特定的方向(1,1),u(sample matrix)就可以 重新設為一個波束形成矩陣,指向估得的方向,令一固定且有規律的相位差向量 NEW u ,uNEW 可以寫成:2 sin( )cos( )/ 2 ( 1) sin( )cos( )/
1 j f dc x C j fc Nx dx C x e e T u (2.72)
2 sin( )sin( )/ 2 ( 1) sin( )sin( )/
1 j f dc y C j fc Ny dy C y e e T u (2.73) vec( ( , ) ( , )) NEW y x T u u u (2.74) 我們便可以將式(2.61),即四個區塊的輸出,重新改寫成:
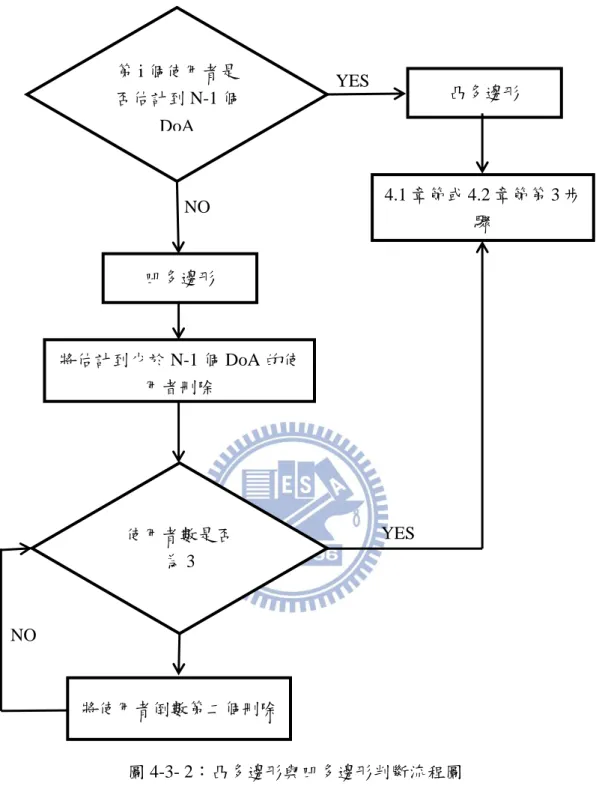
A NEW A NEW A B NEW B NEW B NEW C NEW C NEW C D NEW D NEW D NEW A NEW A x NEW A y NEW A x y y n n n y n n n n y n n n y n n n n u r u A s u r u A s y u r u A s u r u A s u A u A Φ s u A Φ u A Φ Φ (2.75) 利用 2.3.3 章節 DoA 估計 MUSIC 演算法估計出新的一組方向(2,2),再根據 新的(2,2)重新設計uNEW,來達到遞迴的目的。2.7.2 混合式平面陣列天線之遞迴 TLS-ESPRIT 演算法
同樣地,在完成 ESPRIT 估計後,我們假設也可以得到訊號抵達方位 (1, 1 ),依照前一章節 2.4.1 設計uNEW 的方式,重新設計uNEW 。根據之前的討論, 我們同樣也可以得到式(2.70)的特性,利用 2.6.2 及 2.3.4 兩個章節 ESPRIT 演算 法的方式,就可以求得我們要的相位。第三章: LOS 與 NLOS 傳輸:估計與傳輸
3.1 從 LOS 到 NLOS 之傳輸
由於 60GHz 的訊號穿透性較差,當 LOS 路徑突然被擋住時,傳輸即會中斷, 如要避免中斷,則需適時的切換至一適當的反射路徑,因此傳送與接收的方向波 束對在 NLOS 的環境下與 LOS 環境時會不同,如何快速的找到最佳波束對即是 60GHz 傳輸的一關鍵問題。現有的波束搜尋流程包括窮舉法、802.15.3c 中建議 的兩級訓練法(two level)、二分法(tree search)及[6]所提出的 LOS 到 NLOS 快速波束配對法。令平面陣列天線數為 M,二維的波束數 K,G K K,在 K=M 的情 況下, 每種波束搜尋流程所需的訓練序列數如下表所示: 窮舉法 G G 兩級訓練 16 81
ln K
1
二分法 4 ln G
[6]提出的方法(符元數 m) m+m 表 3-1- 1:平面陣列天線的訓練序列數 比較每種波束搜尋流程所需的訓練序列數可得知,窮舉法是最簡單且精確但所需 訓練序列數最高,而兩級訓練和二分法都可以有效降低訓練序列數,但兩級訓練 法較不精確,而二分法另外需要天線控制開關和類比振幅控制器,相對的,[6] 所提出的方法只要接收夠多的 OFDM 符元數可以有效降低波束搜尋所需傳送訓 練序列的次數,並減少設計的複雜度且提高精准度。 接下來我們將介紹[6]提出的波束搜尋法,假設傳輸鏈結開始時是 LOS 的環 境,在做初始波束搜尋時利用訊號處理得到多組可能的波束配對,根據每組波束擇最適當的一組波束配對。例如一開始採用最佳的波束配對(LOS 的配對),但當 此組波束配對被阻礙物擋住訊號無法傳遞時,改採用次佳的波束配對。值得注意 的是一個波束對是對應到一組傳送與接收方向,波束搜尋流程圖如圖 3-1- 1 所示。 本論文採用 IEEE802.15.3c 規格中的 OFDM 多載波模式,系統中有 512 個子載波, 其中 336 個子載波可以用來傳輸資料,[6]中有討論到子載波間的頻率差相較中 心載波是小的,對於某一方向來的訊號,其相位差可視為相同,因此我們可以利 用這些子載波的訊號來統計接收向量y的協方差矩陣(covariance matrix): 336 1 1 336 H H y m m m E y y
R yy (3.1) 圖 3-1- 2:波束搜尋流程圖 傳送端: 傳送全向性場型訊號 接收端: 估計接收訊號的 DoA 接收端: 判斷估計角度屬於編碼簿 中的哪一組波束向量 br,j 傳送端: 判斷估計角度屬於編碼簿 中的哪一組波束向量 bt,i 接收端: 找出通道增益,建立通道 路徑優先順序表 決定傳送端與接收端的波 束配對為 (bt,i ,br,j) 傳送端: 估計接收訊號的 DoA 接收端: 將訊號藉由優先順序表中 的方向回傳至傳送端另外,802.15.3c 的編碼簿設計主要是針對相位控制的陣列(Phased array) , 也就是為了降低設計複雜度而只控制天線的相位偏移。在編碼簿中每一列向量皆 代表一組天線陣列的相位偏移,又稱為波束向量,根據編碼簿中的波束向量可產 生不同指向的波束,且每一波束向量彼此正交,因此利用編碼簿可以同時產生多 組波束並能將彼此的干擾降到最小。而為了降低射頻端的功率損耗,802.15.3c 採用的編碼簿其移相器之解析度僅有 90 度,即只用 2 位元來控制移相器。 接者我們討論 802.15.3c 所定義之碼簿,首先考慮一維陣列天線,假設天線 數為 M,天線間距 d 為 / 2 ,天線為均勻排列,且一波束編碼簿 W 包含的波束 數為 K,在此 W 為一 M K 矩陣,該矩陣中每一元素由下式決定: mod ( / 2), / 4 mod( , ) mod ( / 2), / 4 ( , ) , for ( ) , when 0 ( , ) , for = ( 1) , when 1, , m k K K floor K m k m k K K floor K m k j K M j k M m k K k K W W 2 m0, ,M 1;k0, ,K1 (3.2) 其中floor
為一階梯函數,回傳小於或等於輸入的最大整數。mod
定義為回 傳餘數的函數。而二維的波束編碼簿定義如下: x y W W W (3.3) x W 和Wy分別定義如式(3.2)所示。DoA 估計可以採用前面提到的 MUSIC 或 ESPRIT,注意在這個系統中只有一 個 DAC 或 ADC,所以需要收較多個 OFDM 符元估計 DoA。假設我們設定有四
組波束配對選擇,系統在 8 8 混合式平面陣列天線的情況下,採用 MUSIC 演算
法估計 DoA,則最少需要 5 個符元的時間才能估出 4 個角度,詳細的波束搜尋 步驟如下:
1. 傳送端傳送一個近似全向性場型的訊號。
![圖 2-2- 2:線陣天線的混合式波束形成架構 2.3 線陣天線的 DoA 估計 首先我們介紹一些傳統的 DoA [4][5],之後再敘述適用於混合式陣列天線訊 號之 DoA 估計。我們要做方位估測是因為在做波束形成之前,需要知道訊號的 傳收方向,值得注意的是 DoA 只能決定訊號之接收方向,如果我們假設通道是 是可逆的(Reciprocal),那麼最好的接收方向也將是最好的傳送方向,因此接收端 照著 DoA 所估出的方向發射訊號就可以讓傳送端收到最強的訊號。 2.3.1 線陣天線之 MUSIC 演算](https://thumb-ap.123doks.com/thumbv2/9libinfo/7703929.145162/16.892.209.666.99.748/傳統的之接收方向如果我們假設通道是是可逆的Reciprocal那麼最好接收也將.webp)