行 政 院 國 家 科 學 委 員 會 / 經 濟 部 能 源 局
「 能 源 科 技 學 術 合 作 研 究 計 畫 」 成 果 報 告
***********************************************
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
***********************************************
變頻壓縮機馬達高效率驅動模組之研製
與省能技術之研究
Implementation of a Sensorless Inverter Drive Module for
High-Efficiency Compressor for Energy Saving
計畫類別:
█
個別型計畫 □ 整合型計畫
計畫編號:96-ET-7-009-002-ET
執行期間:96 年 1 月 1 日至 97 年 12 月 31 日
計畫主持人:鄒應嶼 教授
成果報告類型(依經費核定清單規定繳交):□ 精簡報告
█
完整報告
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計
畫、列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,
□一年
█
二年後可公開查詢
執行機構:國立交通大學電機與控制工程研究所
中華民國九十七年二月二十二日
目
錄
摘要(中文) ... iii 摘要(英文) ...iv 1. 向量控制與無感測壓縮機控制的技術發展 1.1 變頻式驅動器研究背景與研究目標...1 1.2 有橋式與無橋式 PFC 電路架構分析...2 1.3 可程式化 DSP 晶片控制壓縮機系統簡介...6 2. 高效率壓縮機變頻驅動器設計 2.1 發展 Buck-Boost VOPFC-PWM 電路架構 ...11 2.2 VOPFC 架構與硬體規劃 ...13 3. 發展交流變頻壓縮機驅動器 PAM 控制法 3.1 PAM 控制簡介...15 3.2 向量控制法 ...16 3.3 永磁馬達參數鑑別 ...19 3.4 演算法簡化&查表法實踐...21 3.5 控制器設計 ...25 3.6 無感測演算法 ...27 4. 電腦程式模擬 4.1 Psim 模擬驗證演算法 ...30 4.2 非理想因素考量...345.1 DSP2407A 簡介...40 5.2 程式實現無感測...41 5.3 實測波形比較...46 6. 執行現狀及檢討 6.1 現今計畫執行成果...51 6.2 未來研究目標與結論...52 參考文獻...54
摘
要
高效率、高功因、變頻控制已成為新型電冰箱壓縮機驅動器的基本需 求。有鑑於高效率壓縮機變頻器在能源節約的重要影響,本計畫為期兩年, 研究新型高效率變頻式電冰箱壓縮機驅動器之關鍵技術,發展高效率的變頻 器驅動電路,採用高頻軟開關(soft switching)方式,提高功率轉換器的效率; 發展以可程式系統晶片(SoPC)為基礎的高效率無刷馬達控制法則,研究高效 率脈寬調變策略,並發展其軟體實現技術。本計畫針對未來高效率冷凍技術 之發展,研究其中變頻器驅動技術,提高整體之冷凍效率,研製完成一個以 SoPC控制為核心的變頻器驅動控制電路板與控制軟體。 本階段之研究著重於針對高效率電冰箱壓縮機發展具有功因修正控制的 PAM高效率變頻驅動器,用脈衝振幅調變(pulse amplitude modulation: PAM) 控制方式,達到高效率、高功因的控制效果。研究內容包括發展可變輸出功 因修正轉換電路,高效率換流器柔切技術,採用高頻軟開關(soft switching)方 式,提高功率轉換器的效率。研究計畫將發展高效率之VOPFC-PAM功率轉 換電路,進行新型高效率PAM變頻驅動器之研製。 關鍵詞:壓縮機、無刷直流馬達、可變輸出功因修正器、脈衝振幅調變、最佳換相 控制策略、可程式系統晶片(SoPC)數位控制、無感測轉子位置估測演算法Abstract
High efficiency, high power factor, and variable speed control have become fundamental requirements of modern compressor drive used in high-efficiency refrigerators and cooling machines. In recent years, high efficiency permanent magnet brushless DC motors have been developed for variable speed control of compressors used in refrigerators. This project is focused on the design and implementation of a high-efficiency PAM inverter drive for compressor used in next-generation refrigerators.
Single-phase AC-DC converter with power factor correction and variable output can be used to improve power quality at the same time to reduce switching losses by adopting pulse amplitude modulation (PAM) technique. An advanced digital control technique will be developed to improve the dynamic responseofthe VOPFC converter. FPGA-based system-on-a-programmable-chip (SoPC) solution will be developed to improve the efficiency of the PAM inverter driven compressor. A prototype of the PAM inverter will be constructed to verify the proposed control scheme.
In the first year of this project, we will focus on the development of a bridgeless PFC converter combined with a PWM inverter to achieve the PAM control of a brushless dc motor used for high-efficiency compressor applications. Soft switching control techniques will be developed to minimize the switching losses as well as the switching stress. Digital power factor correction control technique will be developed for the bridgeless PFC converter to achieve PAM control for the brushless dc motors. A bridgeless PFC converter will be constructed to evaluate the proposed converter topology and control scheme used for high efficiency compressor applications.
Keywords:compressor, brushless dc motor, variable output power factor correction (VOPFC) converter, pulse amplitude modulation (PAM), sensorless start control, sensorless position estimation algorithm, optimal efficiency control strategy, SoPC-based digital motor control
1. 高效率、高功因變頻式壓縮機驅動器技術發展
1.1
變頻式驅動器研究背景與研究目標
傳統的電冰箱與冷凍系統…等白色家電產品多採用以單相感應馬達為主 的壓縮機驅動系統,以ON-OFF方式進行溫度控制。近年來由於馬達驅動技 術的進步,冷凍系統的壓縮機驅動方式也有了重大的改變,採用交流變速驅 動方式進行壓縮機之控制已成為市場發展的主流[1]-[23]。 傳統單相感應馬達的壓縮機驅動系統,在低轉速工作區輸出扭矩低,在 額定運轉速度之效率亦低。如要提高壓縮機的整體效率,就必須考慮馬達的 選擇與壓縮機整體結構之配合,其中變頻器PAM功率級設計與控制方法扮演 著關鍵的角色;透過最佳化的PAM控制策略[24]-[31],得以改善馬達驅動器 的效率與提高功率轉換器的功率密度。 隨著科技進步,變頻式壓縮機除了要求功率的提升之外,對於供電之品 質要求也越來越高;大功率的電能轉換器造成了電源品質汙染,過大的諧波 將導致功率因數不佳,此種現象不僅惡化了供電品質,也間接的造成輸配電 的損失。針對此現像,許多先進國家均已著手擬定相關的標準法規,對於用 電設備之功率因數及諧波污染加以規範,歐盟於2001年一月正式對電子設備 諧波有詳細規範(EN 61000-3-2),規定凡輸出在75W~600W範圍間之電子設備 產品,都必須通過諧波測試[Harmonics test],測量待測物對電力系統所產生 的諧波干擾,限制其功率因數及諧波標準,使其具備功率因數修正器。[45-46] 由於變頻式冷凍機壓縮機廣大的市場潛力,以及從環保觀點出發的所謂 環保冰箱的市場訴求,其關鍵均在於發展高效率低噪音的變頻式壓縮機。結的無刷直流馬達最具發展潛力,具有高效率、高功率密度、高轉速控制範圍 等優點,結合無感測控制(sensorless control)技術[38]-[40],更可以低成本方 式發揮無刷直流馬達的效能,由此當可瞭解採用低單價高效能DSP控制器的 變頻式壓縮機將成為新一代冷凍與空調系統的發展關鍵。 近年來,由於電力電子、微電子、與馬達控制技術的進展,變頻器馬達 驅動技術得到了快速的發展,其應用也日趨廣泛,由於環境保護的要求水準 日益提高,針對各式電機電子產品,國際間訂立更嚴厲的規範,強調電源品 質及節能的重要性;高效率、高功因的直流馬達變頻式驅動器已成為未來的 發展趨勢,為了有效提升白色家電產品的整體效率,新一代壓縮機必須採用 高效率永磁式無刷馬達變速驅動方式,透過單一系統晶片整合,進行系統控 制,發展高效率、高功因且低成本的變頻式壓縮機。 發展高效率、高功因變頻驅動器有三個方法:其一是降低功率元件的開 關損失;其二是提高扭矩效率;其三是提高系統的功率因數。本計劃針對高 效率變頻式壓縮機所使用的無刷直流馬達,進行新型變頻驅動模組之研製, 研究內容包括發展高效率可變輸出功因修正轉換電路、無刷直流馬達的最佳 扭矩控制技術、發展具有功因修正控制的PAM高效率變頻驅動模組,達到高 效率高功因的控制效果。
1.2
有橋式與無橋式PFC電路架構分析
因應各類電機電子設備對電源品質之要求愈趨嚴苛,除對市電供應者提 供用電品質及穩定度要求外,積極降低用電設備對電網(Electric Grid)的污 染,更是電機電子研發者的責任。近年來在半導體產業的長足進展下,耐壓 耐流更高的功率半導體開關元件不斷推陳出新,且電力電子切換技術研發精 進,功率轉換器類別及應用日新月異,使得各式電器產品如:馬達驅動器 (Motor Driver)、不斷電系統(UPS)及各式電源供應器(Power Supply)等,皆能 改善運作效能,提高效率。市面上大多數電源產品均以市電作為輸入來源,將交流電轉換至直流電 源,提供設備內部控制半導體驅動及輸出功率需求,然而傳統上大都採用橋 式二極體或相控閘流體為主之交直流轉換器[47]-[49],使用橋整二極體做成 之交直流轉換器,將交流市電轉換成直流電源輸出端,再接一大電容來降低 輸出電壓漣波,建立所需之穩定直流電源以供應後級之負載;雖然此轉換器 之電路簡單、成本低廉且不需額外之控制,但橋式整流器的非線性特性將導 致電源的輸入端含有大量之諧波電流,而造成諧波電力損失。而相控閘流體 整流器之延遲角控制,更將使輸入端電流諧波成分更嚴重,為解決上述之缺 點,因此我們需要功率修正因數,藉此降低電流諧波,改善電源品質。近年 來應用 MOSFET 與 IGBT 等功率元件設計不同架構於交直流轉換控制之系統 中,達到改善交流轉換直流電路缺點;由於應用上的需要,大部分採以升壓 型(Boost Type)電路架構為之,藉此提供輸出端較高的直流電壓。 升壓型功率因數修正器電路架構,可分成單開關、雙開關及四開關及無 橋式等電路架構[50],如圖1.1所示;從表1.1為升壓型功率因數修正器三種電 路架構之比較可知,單開關具有電路簡單、效率高等優勢,但較適用於小功 率容量;雙開關架構為半橋式架構(Half-Bridge Topology),雖效率介於單開 關與四開關間,為一般中高功率不斷電系統常用之架構,主要是配合輸出半 橋換流器(Half-Bridge Inverter)容易完成共地式架構,最符合安規要求;四開 關架構,即所謂的全橋式架構(Full-Bridge Topology),適用於高功率之電源 系統,其效率較低,控制複雜度高為主要缺點,在共地式處理上仍存在問 題,電力流可控制雙向傳輸,為其最大優點,且在雙開關架構下,開關所需 承受開關應力只有一半,更適用於高壓操作。除此之外無橋式轉換器架構相 較於前述幾種有橋式電路損耗較低,因為不需要橋式整流電路,可以降低二 極體切換導致的能量損耗,所以更適合用來發展高效率交流轉換器。其藉由 控制開關的責任週期比(Duty Ratio),來修正電流波形及調整輸出電壓準位;
有近似正弦波的輸入電流、良好的功率因數,因此廣泛的使用於伺服馬達驅 動器或不斷電系統等場合。 + − LO A D o V b C 2 D S 1 D IL L S V 4 D 5 D 3 D + − LO A D o V b C 2 D S 1 D IL L S V 4 D 5 D 3 D (a)單開關 + − LO A D o V 1 C 2 C 2 D 2 S 1 D 1 S L I L S V + − LO A D o V 1 C 2 C 2 D 2 S 1 D 1 S L I L S V (b)雙開關 + − LO A D o V b C 2 D 2 S 1 D 1 S L I L S V 4 D 4 S 3 D 3 S + − LO A D o V b C 2 D 2 S 1 D 1 S L I L S V 4 D 4 S 3 D 3 S (c)四開關 L L L L + − LO A D o
V
bC
+ − LO A D oV
bC
2 D2 D4 D D4 S VS V S S SS L L L L + − LO A D oV
bC
+ − LO A D oV
bC
2 D2 D4 D D4 S VS V S S SS (d)無橋式 圖1.1 升壓型功率因數修正器之種類表1.1 四種功率因數修正器電路架構之比較 轉換器型式 優 點 缺 點 1.單開關 1. 只使用單開關,效率高。 2. 一個 PWM 訊號,控制電路較簡 單。 3.適用小容量系統。 1. 電力無法雙向傳輸。 2. 負載動態變化時,變動範 圍較大。 3. 不易完成共地架構。 2.雙開關 1.效率介於單開關及四開關之間。 2.電力可雙向傳輸。 3.適用中高容量系統。 4.容易完成共地架構。 1.直流電容電壓可能不平 衡。 3.四開關 1.電力可雙向傳輸。 2.適用大容量系統。 1.開關數量多,故效率差。 2.不易完成共地架構。 4.無橋式 無橋式整流電路,效率為四者中最 高 boost 架構,輸出電壓大於 輸入電壓
然而透過數位信號處理器(Digital Signal Processor, DSP),其具備類比信 號輸入、A/D轉換、浮點運算及處理架構,如TMS320LF240X系列,使得數 位控制技術得以應用於動態響應複雜多變的交直流電源供應器中;具有可程 式化的優點,使得複雜的控制理論得以藉由軟體控制的方式完成;此外DSP 尚能提供各種通訊介面,透過網路與電腦系統連結,可提高產品的附加價 值,成為未來競爭之最大優勢。
1.3
可程式化DSP晶片控制壓縮機系統簡介
圖1.2是一個典型的採用交流變速驅動方式的壓縮機的系統方塊圖。本計 畫將針對變頻式壓縮機冷凍系統,分析其系統架構,改善系統效率,研究主 要針對壓縮機馬達與驅動器的功率因數及扭矩輸出效率作分析,同時設計驅 動器功率級buck-boost電路架構、發展VOPFC電源轉換器,同時進行DC-ACSinusoidal Pulse Width Modulation Inverter 4-20 mA U V W R S Temp. Controller Fan motor Reciprocating Compressor 3 Ph Cap. Run Magnetic Contact SW HI MED 10 R S Fan motor Cap. Run TEV 220V/50Hz A C B Ther mocouple Type T 圖1.2 交流變頻驅動壓縮機的系統功能方塊圖 壓縮機之交流驅動器主要由控制器與功率級兩部分所構成,如圖1.3所 示。本計畫將發展以DSP微控器為基礎的直流馬達最佳效率控制方法,根據 變頻器系統特性,發展高功因、高效率、寬速控範圍的變速控制方法,同時 採用DSP實現無感測控制法則,期望實現全數位之壓縮機無刷直流馬達無感 測變速控制,以應用在白色家電產品中,降低在工作時所造成的能量損耗。 TMS320L F2407A Power conveter PC Conpressor 圖1.3 採用DSP控制的變頻式壓縮機實驗系統的硬體架構圖
Vdc S1 S2 Zc Za C a E b E S3 S4 S5 S6 PWM Generator Zb c E LOAD ENCODER Commutation Control speed calculator current controller speed controller Estimated speed Commutation Angle & Speed
Estimator m ωˆ m ω * m ω m ωˆ Δ _ + Estimated speed error analysis VA VC VB 圖1.4 無刷直流馬達無感測控制架構圖 無刷直流馬達基本的無感測控制架構如圖1.4所示,主要的無感測控制方 法可分為三類:反抗電動勢法、第三次諧波法、與磁通觀測器法。這三種方 法各有其優缺點,而本計劃將以這些方法為基礎,發展適用於壓縮機變速控 制之無感測控制架構。 本計畫主要進行高效率變頻式壓縮機驅動技術之軟體發展,整合無感測 控制及最佳脈寬調變技術,並配合冰箱冷凍系統作有效控制理論規劃,透過 電腦軟體驗證其可行性,詳細之進行步驟如下: • VOPFC-PAM 變頻技術文獻蒐集及功率轉換器的電路拓譜分析 • VOPFC 轉換器電路設計 • 柔切換驅動電路設計 • 無刷直流馬達無感測控制技術文獻蒐集 • 無刷直流馬達速度估測法則之整數運算實現與分析 • 無刷直流馬達無感測控制迴路設計 • PAM 無刷直流馬達速度控制的模擬與實驗
+ − A+ A-B+ B-C+ C-A B C S S N N encoder BLDCM Power Converter
TMS320LF2407A Based DSP Controler 圖1.5 實驗系統架構方塊圖 針對變頻式壓縮機馬達驅動器之研究,目前主要著重於VOPFC功率級架 構與PAM換流器的控制理論實現。 圖1.5為此實驗系統架構方塊圖。在本實驗中將三相定子電流迴授至DSP 控制板之類比/數位轉換模組,並且根據無感測驗演算法估測出轉子角度,再 透過向量控制演算法即可有效進行速度控制。
2. 高效率壓縮機變頻驅動器設計
2.1
發展B
UCK-B
OOSTVOPFC-PWM電路架構
圖2.1為基本Buck-Boost PFC電路的方塊圖,使用平均電流控制模式。首 先對輸入電壓取樣,主要是提供電流波形,以作為輸入電流追隨控制的參考 標準,進而使得輸出電壓、電流能夠達到同相位,提高功率因數;為了使輸 出電壓能夠穩定,因此藉由回授電路將輸出電壓傳回;透過將回授的輸入電 壓波形以及輸出電壓回授訊號丟入乘法器(Multi)產生一個參考電流,然後將 輸入電流訊號與乘法器作用產生訊號,此訊號與先前提出的參考電流相比 較,再經由電流回路補償器(Current EA),最後透過脈衝寬度調變(PWM)產生 兩開關的控制訊號,輸出穩定電壓在負載兩端。Buck-Boost PFC的控制架構 與一般的Boost PFC控制架構有極大差異,其中最大特點為Buck-Boost PFC可 以讓輸出電壓低於輸入電壓,而Boost PFC控制架構輸出電壓僅能操作在比輸 入電壓高狀態。因為Buck-Boost PFC的此架構特性,讓變頻驅動器的直流鏈 端電壓有更多選擇,增加控制策略上的彈性,更易於針對驅動器效率進行改 良。 Input current feedback S1 D1 S2 L D2 C EA Mult/Div Current EA Iref PWM
Vin
Vo
Buck
BoostBuck
Vo < √2 × Vin
Vin
Vo
Buck
BoostBuck
Vo < √2 × Vin
圖2.2 Buck + Boost Operation
Buck-Boost PFC的控制分為兩種模式,此兩種模式會根據輸出電壓與輸 入電壓關係變換時進行切換,如果輸出電壓低於輸入電壓則控制切換為Buck 模式,反之如果輸出電壓高於輸入電壓,則控制切換為Boost模式,由此討論 可知,若此轉換器輸入電壓為震盪弦波,而輸出電壓持續操作比輸入電壓振 伏小時,轉換器將控制在Buck及Boost兩模式輪流切換下,因此如何有效控 制此兩種架構使其皆能正常運作是本計劃所關注的,其控制模式關係可見圖 2.2。 Input current sensing Input current sensing
圖2.3 Charge average current sensing circuit
系統工作於Buck-Boost電路架構且當輸出電壓低於輸入的峰值電壓時, 由於輸入電流是脈衝波形且不連續,此時如果想要回授輸入電流進行控制, 必須加上低通濾波器,濾掉脈衝訊號的高頻成份後,才將訊號回授並和參考 電流進行比較。然而此低通濾波器對系統並未全然是好,此濾波器架構將降
低系統的響應速度,導致系統效能不彰。為了改善此問題,本計畫採用平均 電流偵測的模式,如圖2.3所示,藉由兩個電容讓輸入電流對其充電,進而取 得平均輸入電流資訊;圖中兩個開關對電容進行快速的放電,而四個二極體 使偵測結果的輸出電壓為兩電容電壓中較高者,也就是平均輸入電流的大 小。
2.2
VOPFC架構與硬體規劃
如圖2.4所示,若系統接於較低電壓的來源,亦可藉由buck-boost dc-dc轉 換器,將電壓予以升壓,之後再藉由換流器對產生交流輸出;反之若無刷直 流馬達在高功率輸出實,則提高前級轉換器的輸出電壓,藉由PAM控制策略 驅動馬達,降低開關切換頻率,減少能量損失。此混合式降升壓型交直流轉 換器,可以作為一個主動式電源功率因數調節器,改善系統的功率因數。 85V~265VAC Input current feedback S1 D1 S2 L D2 C Output voltage feedback圖2.4 Charge average current sensing circuit
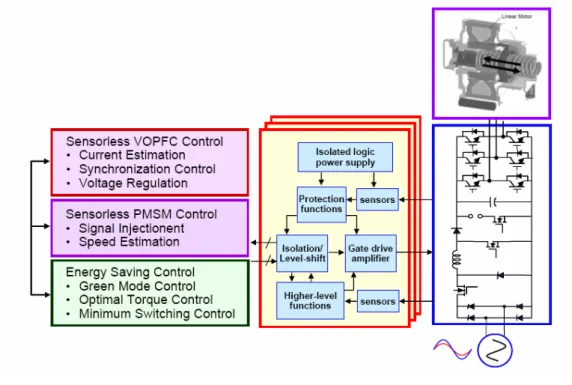
本研究針對驅動器將發展可調輸出電壓的數位式功因修正控制技術、降低開關 頻率與控制EMI、整合無刷直流馬達無感測馬達扭矩控制技術,整合可程式數位電 路與軟體控制技術,成為一個高效率變頻器的變頻控制晶片,其系統架構如圖2.5, 硬體規劃如圖2.6。
圖2.5 馬達驅動系統控制器架構 L N U V W FUSE DYNAMIC BRAKING
Vs Is Vdc Idc Iuf Vuv
S1 Ivf Vvw Vwu Vcmd PWM-u PWM-v PWM-w Ucmd Wcmd DIGITAL PWM INVERTER CONTROLLER Iuf Ivf DB1 FG DB2 Gate Drive
Complementary and Blanking Circuit Protection Circuits Vdc+ Vdc-PWM-f PWM-e PWM-f PWM-u PWM-v PWM-w JUMPER L N EARTH LINE NEUTRAL AC LINE 100-230V 50/60 HZ FG L N EARTH LINE NEUTRAL AC LINE 100-230V 50/60 HZ FG Lf O Vdc+ Vdc-U V W O DB1 DB2 L NC N FG 圖2.6 變頻式驅動器硬體架構
3. 發展交流變頻壓縮機驅動器PAM控制法
3.1
PAM控制簡介
透過脈波寬度調變(Pulse Width Modulation: PWM)控制方法,在壓縮機驅 動級實現脈波震幅調變Pulse Width Modulation: PAM),達到DC-AC的轉換功 能,常用於直流馬達的控制、電源變換器之穩壓控制、甚至是直流轉換交流 弦波的控制等,是控制直流馬達轉速最常見的方法。其原理如圖3.1(a)與 3.1(b)所示,圖中高電位的部份是馬達「動作」時間,或叫做「責任週期 (Duty Cycle)」,低電位的部份是馬達「停止」時間,兩者時間和即為一週 期。當使用者想降低馬達轉速時,只要減少動作的時間、增加停止的時間, 並保持週期不變即可,如圖3.1(a)所示。反之,如果想加快馬達的轉速,則需 要加長動作的時間、縮短停止的時間,並且保持週期不變,如圖3.1(b)所 示。由於改變轉速係透過改變動作的時間比例,也就是圖1(a)與1(b)中高電位 脈波(Pulse)的相對時間寬度(Width),因此這樣的控制方式稱作脈波寬度調 變。 圖3.1(a) PWM作用原理於低轉速時
圖3.1(b) PWM作用原理於高轉速時
3.2
向量控制法
透過現今DSP的高速運算能力,可以讓我們順利地利用向量控制演算法 將原本的靜止三軸座標轉換到d-q兩軸座標,簡化控制器的設計,並大大地提 高控制的效率及穩定度。 所謂的馬達即是個電與磁交互作用的系統,為了簡化操作模式,將磁場 及電流視作為向量函數,並將同步旋轉座標軸定義在動態的轉子之上,屆時 操作系統只要考量對應在轉子上的兩個垂直磁通量,分別λ (定子等效磁通S 量)及λR(轉子等效磁通量);在等速旋轉下的馬達需要固定的轉矩,因此需要 固定大小的λ ,透過改變S λ 即可等比例地改變馬達轉矩,增快或減慢轉速。S 此外也可透過改變λR大小,進行弱磁或是強磁控制。 為了達到座標轉換與解耦的控制技巧,透過座標轉換的數學模型,可藉 此完成演算法。交流馬達在不同座標系之下的變數表示如以下討論。在複數 平面上,a-b-c 與 分別代表『靜止』三軸座標系與二軸座標系,d-q 代表 『同步旋轉』座標系。如圖3.2 所示: 圖3.2 向量座標轉換關係圖 a-b-c 靜止三軸座標 α−β靜止二軸座標 d-q 兩軸同步旋轉座標令表示定子變數,可以代表電壓、電流或是磁交鏈。因此,瞬間的複數 空間向量定義為: ) ( 3 2 23π 43π α β α j cs j bs s s s s e f e f f jf f f + + = + = (3-1) 其中 3 2 係數主要是用來令轉換後的向量仍能保持與原三相輸入相同的振幅大小;將 上式分解成實部與虛部。靜止兩軸座標α − 至靜止三軸座標 a-b-c 的轉換矩陣β 表示如下: ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ cs bs as os s s f f f f f f 2 / 1 2 / 1 2 / 1 ) 3 / 2 sin( ) 3 / 2 sin( ) sin( ) 3 / 2 cos( ) 3 / 2 cos( ) cos( 3 2 θθ θθ ππ θθ ππ β α (3-2) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + + − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ os s s cs bs as f f f f f f β α π θ π θ π θ π θ θ θ 1 ) 3 / 2 sin( ) 3 / 2 cos( 1 ) 3 / 2 sin( ) 3 / 2 cos( 1 ) sin( ) cos( (3-3) os f 是零序分量,對於三相平衡系統而言,零序分量為零;其中定義α 軸與a 軸重合,所以將θ=0 值代入上式,得到轉換矩陣。 d-q 同步旋轉座標與α−β靜止兩軸座標之間的轉換矩陣則是如下: ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ s s e e e e qs ds f f f f β α θ θ θ θ cos sin sin cos (3-4) ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ qs ds e e e e s s f f f f θ θ θ θ β α cos sin sin cos (3-5) 其中θ 定義為靜止座標e α軸與同步旋轉座標d軸的夾角,即為為電氣角。
圖3.3 三座標系間定義位置與馬達實體關係圖
藉由已推導完成的向量控制數學模型,架構出以下完整閉迴路系統控制 方塊圖:
3.3
永磁同步馬達的參數鑑別
3.3.1 電氣參數的鑑別 永磁同步馬達主要的電氣參數為定子線圈電阻、電感與反抗電動勢常 數。電阻與電感決定馬達的電氣時間常數;反抗電動勢常數與馬達扭矩的產 生以及馬達的速度控制範圍有關. 電阻與電感除了可利用儀器直接量測之外,也可輸入一電壓訊號,藉由 觀察電流響應波形求得。為了使問題單純化,可將馬達的轉子鎖住,如此就 不會有反抗電動勢產生,再由馬達的任意二線輸入步階電壓訊號: 0 ( ) s( ) v t = ⋅V u t−t (3-6) 同時將馬達的第三條線開路。輸入電壓與電流的響應波形應如圖3.5所示,利 用(3-7)可求出電阻值與時間常數,進而得到電感值。(
( 0))
0 ( ) 1 ( ) 2 s s R t t L s s V i t e u t t R − − = − ⋅ − (3-7) t V i(t) v(t) 2 s V R t0 0 圖3.5 定子線圈的電壓與電流響應波形 反抗電動勢常數為馬達每單位的轉速所產生的反抗電動勢振幅。在一般才是反抗電動勢。為了直接得到馬達反抗電動勢的波形,可利用外力驅使馬 達旋轉,再以示波器量測馬達的線間電壓,即可得到馬達線對線的反抗電動 勢,根據反抗電動勢的頻率 fe以及峰值E可求出反抗電動勢常數,如圖3.6與 (3-8),通常反抗電動勢常數是以V rpm為單位表示: ( V rpm) 60 E e PE K f = (3-8) 其中的P為馬達的極對數。 t 0 ( ) ab e t 1 e f 3E 圖3.6 反抗電動勢常數的計算 3.3.2 機械參數的鑑別 與速度控制或位置控制的響應直接相關的馬達參數為轉子的轉動慣量以 及摩擦係數。根據(3-9),馬達無負載時的轉矩方程式可寫成(3-10)。 M L B N B B= 2 + (3-9) r M r M e B dt d J T = ω + ω (3-10) 若控制電流使馬達產生固定的轉矩,並假設摩擦力BM可忽略,馬達的轉速會 如圖3.7直線上升,轉子的轉動慣量JM可由下式計算得到: e M r T t J ω ⋅ Δ = Δ (3-11)
若考慮摩擦力,定轉矩應使轉速呈指數曲線上升,如下式: (1 BM t JM) e r M T e B ω = − − ⋅Δ (3-12) 利用(3-12)可同時求出轉子的轉動慣量JM與摩擦力BM。 0 t Te r ω t Δ r ω Δ 圖3.7 馬達機械參數的計算
3.4
向量控制演算法簡化&查表法實踐
雙矩陣簡化由系統方塊圖1.3可知系統下命令id*及iq*指令後,依序經過Inverse Park
transform(3-13) 及Inverse Clark transform(3-14)進行座標轉換成a-b-c座標fa ,fb ,fc
函數輸出。
Inverse Park transform
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ qs ds e e e e s s f f f f θ θ θ θ β α cos sin sin cos (3-13) Inverse Clark transform
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + + − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ os s s cs bs as f f f f f f β α π θ π θ π θ π θ θ θ 1 ) 3 / 2 sin( ) 3 / 2 cos( 1 ) 3 / 2 sin( ) 3 / 2 cos( 1 ) sin( ) cos( (3-14) 將(3-13)及(3-14)兩式結合,並令α 軸與a軸同向,La方向定為角度0度,
15),藉由此轉換矩陣可減少DSP控制器為了實踐演算法所必須進行的兩次矩 陣運算。 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − − − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ qs ds e e e e e e c b a f f f f f ) 3 / 2 sin( ) 3 / 2 cos( ) 3 / 2 sin( ) 3 / 2 cos( sin cos π θ π θ π θ π θ θ θ (3-15) 依照前述推導理論,可同理類推,當a-b-c座標fa ,fb ,fc 函數經過兩次座標
轉換依序為Park transform (3-16)及Clark transform (3-17)回傳id及iq數值,可將
兩次矩陣運算結合,得到一個新的轉換矩陣(3-18)。 Park transform ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ s s e e e e qs ds f f f f β α θ θ θ θ cos sin sin cos (3-16) Clark transform ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ cs bs as os s s f f f f f f 2 / 1 2 / 1 2 / 1 ) 3 / 2 sin( ) 3 / 2 sin( ) sin( ) 3 / 2 cos( ) 3 / 2 cos( ) cos( 3 2 θθ θθ ππ θθ ππ β α (3-17)
結合Park transform 及Clark transform,其中令θ =0
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − − − − + − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ cs bs as e e e e e e os s s f f f f f f ) 3 / 2 sin( ) 3 / 2 sin( ) sin( ) 3 / 2 cos( ) 3 / 2 cos( ) cos( 3 2 π θ π θ θ π θ π θ θ β α (3-18) 得到兩個簡化矩陣後,觀察轉換矩陣(3-15)、(3-18)中元素分別由正弦及 餘弦函數組成,為了方便以後轉換成查表法,我們可以利用三角函數公式(3-19)將所有餘弦函數變成等效正弦函數,最終可將轉換矩陣簡化成由單一正弦 函數組成矩陣(3-20)、(3-21)。 ) 90 sin( ) cos(θ = θ + o (3-19)
⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + − − − − + − + = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − − − − + − ) 3 / 2 sin( ) 3 / 2 sin( ) sin( ) 6 / sin( ) 6 / sin( ) 2 ( 3 2 ) 3 / 2 sin( ) 3 / 2 sin( ) sin( ) 3 / 2 cos( ) 3 / 2 cos( ) cos( 3 2 π θ π θ θ π θ π θ π θ π θ π θ θ π θ π θ θ e e e e e e e e e e e e s (3-20) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − − − − + = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − + − − − − ) 3 / 2 sin( ) 6 / sin( ) 3 / 2 sin( ) 6 / sin( sin ) 2 / ( ) 3 / 2 sin( ) 3 / 2 cos( ) 3 / 2 sin( ) 3 / 2 cos( sin cos π θ π θ π θ π θ θ π θ π θ π θ π θ π θ θ θ e e e e e e e e e e e e s (3-21) 查表法 透過DSP晶片雖然可以進行大量高速運算,但是在向量控制演算法中需 要大量且重複性的矩陣運算,其中矩陣內正弦值的運算不但為系統增加大量 負擔,也因此限制住系統的操作最高頻率。為了降低系統CPU的運算量,並 讓演算法的單週期運算時間更短,採用查表法來減少CPU運算的時間,增進 向量控制演算法的工作效率。 在DSP程式中宣告一個副程式執行建立sin表,以供查表法使用。雖然正 弦值為一個360度(角度)的函數,但根據(3-22)、(3-23)三角函數關係,可找出 其對稱性。 ) sin( ) 180 sin(θ + o =− θ (3-22) ) sin( ) 360 sin(θ + o = θ (3-23) 利 用 正 弦 函 數 對 稱 性 , 僅 需 建 立0o ~180o 的 正 弦 值 加 上 『 區 間 判 定 法』,即可推導出所有角度的正弦值,此法可再減少一半儲存記憶空間,同 時所需建表時間也只要一半。
已知簡化向量控制轉換矩陣為(3-20)、(3-21),又馬達回傳電氣角度範圍 o o ~360 0 = e θ ,故可以推得演算法所需角度範圍為−120o ~480o之間。 表3.1 正弦函數操作角度範圍 矩陣元素 正弦值角度範圍 ) sin(θ e =0o ~360o e θ ) 120 sin( + o e θ =120o ~480o e θ ) 120 sin( − o e θ =−120o ~240o e θ ) 90 sin( + o e θ =90o ~450o e θ ) 30 sin( + o e θ =30o ~390o e θ ) 30 sin( − o e θ =−30o ~330o e θ 依照圖3.8 將θ 共畫分成四個區間,藉由邏輯判斷式依序調整並傳回合e 理函數值,提供演算法執行運算,合理函數值操作可見表3.2。 『區間判定法則』如下:
120
180
180
120
0
180
360
480
-120
120
180
180
120
0
180
360
480
-120
圖3.8 正弦函數與區間判定法關係表3.2 區間分割關係分配表 區塊分割θ 角度操作 數值操作 o o ~0 120 − θ +180o −sin(θ) o o ~180 0 θ +0o sin(θ ) o o ~360 180 θ −180o −sin(θ) o o ~480 360 θ −360o sin(θ ) 成功利用查表法求得正弦函數數值後,再將值代入向量控制演算法中獲 得合理電流命令,完成向量控制。 利用Matlab程式直接驗證比較 a. 查表法(不含建表時間)與 b. 直接運算法 運算一次所需時間,分別為表3.3: 表3.3 Matlab模擬兩種演算法執行時間 運算方法 花費時間 a.查表法 0.022285 sec b.直接運算法 0.032906 sec 由以上驗證可得知查表法將可作為此向量控制演算法之最佳解決方案。
3.5
控制器設計
目前控制器使用的PWM控制方法,屬於電壓控制電流模式,然而馬達本 身即為一個大型電感性負載,所以電流與電壓之間存在有一個相位落後關 係,所以在控制過程中控制命令與輸出電流間存在一個固定相位落後角,如 圖3.9所示。e θ a i b i c i a f b f c f 0 0 0 e T f α 0° 60° 120° 180° 240° 300° 360° θe a i b i c i a f b f c f 0 0 0 e T f α 0° 60° 120° 180° 240° 300° 360° 圖3.9 相位命令與三相電流相位關係 因為電流響應的落後,導致反抗電動勢與響應電流間存在一個相位差, 降低輸出功率,減少馬達工作效率。冷凍機的壓縮馬達運作時間長久,其工 作效率為最大考量,所以為了改善電流響應的品質,將做電流閉迴路控制圖 3.10,獲得更佳的電流響應。
Inverter PMSM DC AC + _ Current Controller a i ib ic * a v * c v vb* PWM Signal Generator Encoder Sine Table a-b-c d-q d I Iq e θ sinθe cosθe + _ * d I * q I Current Controller a-b-c d-q sinθe cosθe * d V * q V sinθe cosθe 圖3.10 向量控制閉迴路控制架構 電流控制器最簡單的形式之一為比例積分控制器(PI controller),使用靜 止三軸轉同步旋轉二軸的磁場導向向量控制,電流控制器所控制的是直流 量,因此降低了系統控制的複雜度,透過比例積分器可以使馬達對於定速命 令達到零穩態誤差。不過所能下的速度命令也受到馬達所容許的最大電流限 制,馬達能承受較大的電流流過,代表馬達能產生的轉矩也愈大,能有較高 的加速度。 在選擇積分常數時須注意電流控制器所能產生的馬達最大加速度,若是 積分常數太大,對於斜率較大的速度命令,甚至是步階命令,積分器可能提 前飽和而失效。
3.6
無感測轉子角度估測演算法的基本原理
永磁同步馬達的電壓方程式如(3-24): 0 0 0 0 0 0 0 0 an s a s a a v R i L i e d v R i L i e ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢+ ⎥ ⎢ ⎥ ⎢ ⎥+ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ (3-24)其中的反抗電動勢為轉子角度的函數,振幅與馬達轉速成正比,可將其表示 成: 1 1 1 1 1 1 ( ) ( ) ( ) ( ) ( ) ( ) a a e a e e E b E r b e b e c c e c e e e e d K e K e e P dt e e e θ θ θ ω θ θ θ θ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥= ⎢ ⎥= ⋅ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (3-25) 其中ea1、eb1與ec1為振幅正規化後的反抗電動勢波形,對於弦波型永磁同步 馬達可表示為: 1 1 1 ( ) sin( ) ( ) sin( 120 ) ( ) sin( 120 ) a e e b e e c e e e e e θ θ θ θ θ θ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢= + ° ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ + ° ⎥ ⎣ ⎦ ⎣ ⎦ (3-26) 將(3-25)代入(3-24),且為了能以數位方式實現此演算法,將微分運算以差分 的方式表示,則分別由各相估測所得到的轉子角度增量為 1 ( ) ˆ ˆ ( ) an s a est s a ea E a e v R i T L i P K e θ θ − ⋅ − Δ Δ = ⋅ (3-27a) 1 ( ) ˆ ˆ ( ) bn s b est s b eb E b e v R i T L i P K e θ θ − ⋅ − Δ Δ = ⋅ (3-27b) 1 ( ) ˆ ˆ ( ) cn s c est s c ec E c e v R i T L i P K e θ θ − ⋅ − Δ Δ = ⋅ (3-27c) 其中Test代表轉子角度估測的取樣週期,Δia、Δib與Δic為三相電流的變化 量。理想的情況下各相所得到的結果應相等 ˆ ˆ ˆ ˆ ae be ce e θ θ θ θ Δ = Δ = Δ = Δ (3-28) 其中Δθˆe代表轉子角度變化量。 然而,若使用(3-27)估測轉子角度,當反抗電動勢為零時會得到無限大 的結果,導致很大的估測誤差。為了改善這個問題,首先將(3-27)改寫成:
[
]
1 1 1 1 ˆ ( ) ( )ˆ ˆ ( ) ( )ˆ ( )ˆ ea a e b e a s a est s a b e a b e E E P P e e v R i T L i e e K K θ θ θ θ ψ θ Δ ⋅ = ⋅ − ⋅ − Δ ⋅ = ⋅ Δ ⋅ (3-29a)[
]
1 1 1 1 ˆ ( ) ( )ˆ ˆ ( ) ( )ˆ ( )ˆ eb b e c e b s b est s b c e b c e E E P P e e v R i T L i e e K K θ θ θ θ ψ θ Δ ⋅ = ⋅ − ⋅ − Δ ⋅ = ⋅ Δ ⋅ (3-29b)[
]
1 1 1 1 ˆ ( ) ( )ˆ ˆ ( ) ( )ˆ ( )ˆ ec c e a e c s c est s c a e c a e E E P P e e v R i T L i e e K K θ θ θ θ ψ θ Δ ⋅ = ⋅ − ⋅ − Δ ⋅ = ⋅ Δ ⋅ (3-29c) 其中的Δψa、Δψb與Δψc分別代表各相對應於反抗電動勢的磁通鏈變化量。 由於ea1、eb1與ec1為相位差120°、振幅為1之三相弦波,對於所有的θ 下式恆ˆe 成立 1 1 1 1 1 1 0.75 a b b c c a e e +e e +e e = − (3-30) 將(3-27)三式相加並根據(3-29),經過一些運算後可推導得轉子角度變化量為 1 1 1 ˆ ( )ˆ ( )ˆ ( )ˆ 0.75 e a b e b c e c a e E P e e e K θ ⎡ ψ θ ψ θ ψ θ ⎤ Δ = ⋅ Δ⎣ + Δ + Δ ⎦ − (3-31) 將上式的結果累加可估測轉子位置θˆe: ˆ ( ) ˆ( 1) ˆ ( ) e k e k e k θ =θ − + Δθ (3-32) 圖3.11為此無感測轉子角度估測方法的方塊圖[38],圖中由虛線所包圍的部 分構成一迴路,當轉子角度估測結果產生誤差時,能自動修正使轉子角度的 估測結果得以逐漸收斂至正確值[39]-[40]。 a ψ Δ b ψ Δ c ψ Δ Flux Linkage Increments Calculation Rotor Position Increment Estimation Back-EMF Function Generation an v ia 1 a e 1 − z 1 b e ec1 bn v vcn ib ic ˆ e θ Δ θˆe(Internal Closed-Loop Correction)
4. 電腦程式模擬
4.1
P
SIM模擬驗證演算法
為了測試向量控制演算法之可行性,使用Psim軟體進行電路驗證。Psim 軟體可透過DLL檔設定,連結Visual C++軟體,成功以C語言代替DSP數位控 制器完成數位演算法計算,並將結果輸出控制PWM Modual,驗證向量控制 演算法。 利 用 速 度 感 測 器 、 積 分 器 及 取 商 數 函 數 可 得 到 週 期 電 氣 角 度 o o ~360 0 = e θ ,如圖 4.1,並將電氣角度代入向量控制演算器,得到三相磁通 命令訊號,如圖4.2。 速度量 測器 積分器 取商數 圖4.1 PMSM Model 及角度估測器0 50 100 150 200 250 300 350 400 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 fa fb fc 圖4.2 a-b-c座標系三相電壓相位命令 結合訊號比較器,如圖 4.3,控制 PWM 輸出六個開關訊號,成功啟動 並定速控制永磁同步馬達,圖 4.4 為六組開關及其控制訊號與 PMSM 之連 結;圖4.5 為馬達成功啟動,並最終定速在 2500 rpm。 向量控制演算器 向量控制演算器 圖4.3 無感測轉子角度估測演算法方塊圖
圖4.4 六組開關及其控制訊號與PMSM之連結 圖4.5 馬達成功啟動,並最終定速在2500 rpm 除了定速控制之外,同時針對正反轉速度變化進行模擬驗證,圖4.6為磁 通命令訊號由正到負,對應速度由正2500 rpm到負方向2500 rpm。圖4.7為正 反轉控制時三相電流變化比較,圖4.8為正反轉控制時可見Idc在啟動及馬達 轉子反轉時皆電流變大,可預測此兩階段皆需要較大扭力及加速度。
圖4.6 向量控制正反轉控制
與上述同理,透過 DLL 檔設定,代入馬達參數後可進行無感測演算法 模擬,取代原先藉由速度感測器而取得位置座標,將角度估測後的電氣角θe 代入向量控制演算器進行速度控制,圖 4.9 為加入無感測估測後進行定速控 制,速度命令為2500 rpm。 圖4.9 無感測演算法控制
4.2
非理想因素考量
取樣頻率 在數位控制器操作下,首先面臨問題就是數位控制器的訊號控制並非連 續,所以即使是用向量控制法控制弦波電流,也面臨到取樣頻率該取多少的 問題,取樣頻率大的話就會減少每週期的運算時間,也因開關切換次數上升 導致散逸功率增加;但是取樣頻率取得過小將導致電流連波上升,電流控制 頻寬降低,造成系統響應變差。 定子電感誤差 除此之外還有來自馬達參數誤差造成無感測演算法角度估測誤差;假設 實際的定子電感Ls與標稱值Lˆs的關係為 ˆ s s s L =L + ΔL (4-1) 其中的ΔLs代表標稱定子線圈電阻的誤差。根據上式所得到磁通鏈增量為( ) ˆ ( ) a an s a est s a an s a est s a s a v R i T L i v R i T L i L i ψ Δ = − − Δ = − − Δ − Δ (4-2) b ψ Δ 、Δψc的推導與(4-2)類似。假設其它的參數與回授訊號皆準確無 誤,並且馬達各相的電流與反抗電動勢無相位差,利用(4-30)與(4-2)可導出 轉子角度變化量的估測結果: 2 ˆ sin(30 ) cos(30 ) 2 sin(30 ) cos(30 ) 2 sin(30 ) 2 cos(30 ) 2sin(30 ) 2 cos(30 ) est e err s r err E
est err s r err
E err s r err e e err L err PT E L IP K PT E E L IP K E E L IP E θ θ ω θ θ ω θ θ ω θ θ θ θ α θ ⎡ ⎤ Δ = ⎣ ° + + Δ ° + ⎦ ° + + Δ ° + = ⋅ ° + + Δ ° + = Δ ⋅ = Δ ⋅ ° + + ° + (4-3) 其中α 為L ΔLs所對應的電壓降峰值與反抗電動勢峰值之比。當估測結果到達 穩態時,ea1( )θ 、ˆe 1 ˆ ( ) b e e θ 以及ec1( )θˆe 的頻率應與馬達的電機頻率相同,也就是 ˆ e θ Δ 與Δθe相同,但因αL不等於 0,使得θerr必須不為0°才能使(4-3)的等式成 立。由(4-2)可得到θerr與αL的關係為: 1 1 2 1 sin tan ( ) 30 2 1 err L L θ α α − ⎛⎜ ⎞⎟ − ° = − − ⎜ + ⎟ ⎝ ⎠ (4-4) 類似於定子線圈電阻誤差的分析結果,標稱定子線圈電感值誤差的程度 並非直接影響估測結果的量,定子線圈電阻實際值與標稱值之間的差所對應 電壓降大小,與反抗電動勢之間比例關係,才能決定其對估測結果所造成的 影響。圖 4.10 顯示標稱定子線圈電感誤差對應的電壓降峰值與反抗電動勢峰 值之比對轉子角度估測誤差的關係曲線。圖 4.11 為標稱定子線圈電感誤差所 對應的電壓降峰值為反抗電動勢峰值的20%時轉子角度估測的結果。
(degree) err θ L α 圖4.10 標稱定子線圈電感誤差對應的電壓降峰值與反抗電動勢峰值之比對轉子角 度估測誤差的關係曲線圖 圖4.11 標稱定子線圈電感誤差所對應的電壓降峰值為反抗電動勢峰值的 20%時對 轉子角度估測的影響 馬達端電壓或線電流感 馬達端電壓或線電流的回授因感測器的非理想因素可能產生包括直流偏 移誤差、增益誤差與相位落後等靜態誤差。假設馬達端電壓的回授訊號三相
同時有一相同大小的直流偏移誤差Voffset: ˆ ˆ ˆ an an offset bn bn offset cn cn offset v v V v v V v v V ⎡ + ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ =⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ + ⎣ ⎦ ⎣ ⎦ (4-5) 將上式代入(4-30)可得到轉子角度變化量的估測結果為
(
1 1 1)
2 ˆ sin( 30 ) ( )ˆ ( )ˆ ( )ˆ 0.75 sin(30 ) offset est e err a e b e c e E e err V PT E e e e K θ θ θ θ θ θ θ ⎡ ⎤ Δ = ⋅⎢ + ° + ⋅ + + ⎥ ⎣ ⎦ = Δ ⋅ ° + (4-6) 電流回授三相訊號同時有一相同大小直流偏移誤差對估測結果的影響, 推導方式與上式類似。由(4-6)可知,若馬達端電壓或電流三相同時有相同大 小的直流偏移誤差,對估測的結果不會造成影響。圖 4.12 為感測電壓有直流 偏移誤差時轉子角度估測的模擬,圖中顯示,即時三相有等量的的直流偏移 誤差,轉子角度估測誤差仍維持不變。 圖4.12 三相電壓回授訊號有直流偏移誤差對轉子角度估測的影響計算。假設正確的對應於反抗電動勢的磁通鏈增量Δψa、Δψb與Δψc與計算 出的對應於反抗電動勢的磁通鏈增量Δψˆa、Δψˆb與Δψˆc之間的關係為 ˆ ˆ ˆ a a b b c c ψ ψ ψ ψ α ψ ψ ψ Δ Δ Δ ⎡ ⎤ ⎡ ⎤ ⎢Δ ⎥= ⎢Δ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢Δ ⎥ ⎢Δ ⎥ ⎣ ⎦ ⎣ ⎦ (4-7) 其中的αΔψ代表Δψa(或Δψb、Δψc)與Δψˆa(或Δψˆb、Δψˆc)的比值。由(1-30)與 (4-7)可推得 2 ˆ est sin(30 ) e err E PT E K ψ θ αΔ θ Δ = ⋅ ° + (4-8) 因此Δψˆa 、Δψˆb與Δψˆc的振幅誤差可等效成標稱反抗電動勢常數的誤 差。 電壓或電流的感測誤差造成計算磁通鏈增量相位誤差對估測結果的影響分析 如下。若假設Δψˆa、Δψˆb與Δψˆc有一相位誤差θΔψ,表示成 ˆ sin( ) ˆ sin( 120 ) ˆ sin( 120 ) a e b est e c e T E ψ ψ ψ ψ θ θ ψ θ θ ψ θ θ Δ Δ Δ ⎡ ⎤ Δ − ⎡ ⎤ ⎢ ⎥ ⎢Δ ⎥= − − ° ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢Δ ⎥ − + ° ⎣ ⎦ ⎣ ⎦ (4-9) 由(1-30)與(4-9)可推得 ˆ 2sin(30 ) e est err E P T E K ψ θ θ θΔ Δ = ⋅ ⋅ ° + − (4-10) 因此在穩態時 err ψ θ =θΔ (4-11) 圖 4.13 為Δψˆa、Δψˆb與Δψˆc有相位誤差時的轉子角度估測結果,如(4-11) 所示,計算磁通鏈增量的相位誤差將直接反應至估測角度的誤差。
5. DSP程式設計
5.1
DSP2407A簡介
本 實 驗 系 統 所 採 用 之 控 制 電 路 為 以 DSP(TMS320LF2407A)為核心之 VP2407AEVM 數位控制板,實體電路如圖 5.1 所示,此控制板為旺宏科技所 自行開發之控制板。德州儀器公司(Texas Instrument)所生產之單晶片數位訊 號處理器 TMS320LF2407A 的核心處理單元,其中除了加入程式記憶體及資 料記憶體以簡化使用者設計電路外,本身亦含有許多周邊功能,如事件管理 模組、類比/數位轉換模組、數位/類比轉換模組、串列通訊介面模組、串列 周邊介面模組、鎖相迴路模組編碼器四倍頻電路、看門狗計時器…等。 其中,事件管理模組、類比/數位轉換器模組及編碼器四倍頻電路更是針 對電力電子相關用途所特別設計,以事件管理模組為例,脈寬調變波輸出方 式有三種可供選擇設定,在應用時提供較大之彈性空間。 在撰寫程式方面,因為 TMS320LF2407A 有 C 語言的編譯器,因此除了 使用組合語言撰寫程式外,亦可以使用 C 語言來撰寫程式。透過以 C 語言為 基礎的軟體發展環境,可將複雜的組合語言控制程式以 C 語言撰寫與編譯, 除可減少程式發展時間及增加程式維護性及可讀性外,也使得程式的偵錯更 容易,唯使用 C 語言時需特別注意系統的執行時間是否夠用,因為經由編譯 器將 C 語言程式編譯成組合語言程式,再組譯成機器語言時,效率將比直接 撰寫組合語言再經由組譯成機器語言效率較差,這也是使用 C 語言時所需注 意到的地方。最後,再將組譯後的程式(*.out)經由 DSP Emulator(XDS-510PP)或 WinDSP 軟體下載至數位控制板來執行即可。圖5.1 VP2407AEVM 的實體圖
5.2
程式實現無感測
5.2.1 以定點DSP實現整數運算 由 於 本 實 驗 所 採 用 之 控 制 單 元 為 單 晶 片 數 位 控 制 器 , 而 TMS320LF2407A 為一定點(fixed-point)16 位元之數位控制器,而在設計控制 器參數時常常都含有小數成分,因而數值與數值間運算上的精度會受到硬體 內部字元長度之限制,在撰寫程式時需考量數值處理問題,必須運用其他方 法以求有效提高運算精度。類比/數位轉換之解析度選擇亦為程式撰寫所需注 意的地方,以下針對常見的問題作說明。 Q 格式尺規化 一般微處理器的基本運算(加減乘除)都是以二進位整數來完成,數值 表 示 式 部 分 , 通 常 以 2 補 數 描 述 式 為 基 礎 , 以 定 點 16 位 元 之 TMS320LF2407A 為例,包含一個符號位元及 15 個有效位元,能表示之數值 範圍為-32768~+32768。若要執行小數運算,則需以定點數 2 補數表示式為元所組成,此種表示式稱為Q 格式表示法。 選擇適當之 Q 格式表示法,就可以把數值依據所需要的精度作適當的轉 換,使定點 DSP 也能處理高精度之浮點數。假想小數點位於一個數字之第 8 位數與第9 位數之間,則下列數字代表了 2.625 0 0000010 10100000 符號位元 整數部分← . →小數部分 此即為 Q8 格式,其所能表示的範圍為-128(1000 0000 0000 0000)~ +127.996 ( 0111 1111 1111 1111 ) 之 間 , 有 效 精 確 度 為 0.004 (1256或 8 2 1 )。 以Q15 格式為例,其轉換方式如下: 1. 先確定準備轉換之十進制數值 N,是在 Q15 格式的數值範圍之間,亦 即 999997 . 0 000000 . 1 ≤ ≤+ − N 2. 把數值 N 乘以 215,亦即 = ×215 = ×32768 N N N 3. 把步驟 2 的結果加 216,亦即 = +216 = +65536 N N N 4. 把步驟 3 的結果轉換為 16 進制,並將第 17 位元捨棄掉,所得結果即 為N 的 Q15 轉換值。 以整數運算實現乘法與除法 在某些 DSP 演算法中,必須將存在或是即將進入累加器中的資料倍率 化。在適應(adaptation)或其他的演算法中,經常需要計算及使用修正因子 (correction factor)或對某些結果作正規化處理。而移位方式可分為邏輯移位及 算術移位兩種;邏輯移位是將移位之後所空下來最左邊的最高位元補 0;算 術移位則將最左邊的符號位元保持不變,即原來 1 則仍為 1,原來 0 則保持 為0。 減法之實現方法多以 2 補數完成,在此不加以詳談。而要以整數運算的
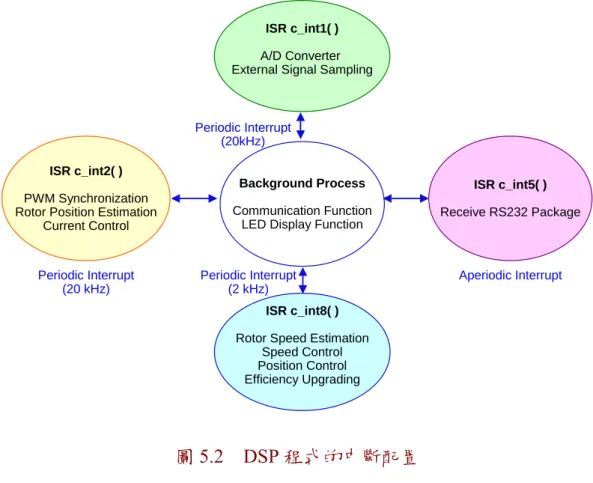
方式實現分數或小數的乘法,必需利用移位的方式達成,亦即將分數或小數 化先化成分數後,再將分母調整成以 2 為倍數,除配合硬體架構取位元數 外,並求盡量減少誤差,舉例如下 16 10 6 2 2 27 2 27 64 27 42 . 0 ≈ ⋅ = ⋅ = ⋅ ⋅ ⋅ X X X X (5-1) 即先將數值乘上 27,再將乘積左移十位元,最後將最前面 16 位元作為計算 結果,因為 TMS320F240 的硬體結構會將乘積結果放在一 32 位元的 P 暫存 器中,而左移 10 個位元相當於乘上 210,而取前面 16 個位元則相當於除 216 的動作。由於為近似值,因此可得誤差大小為 001875 . 0 64 27 42 . 0 − =− (5-2) 關於除法部分,由於除法所需時間較長,若考慮程式執行的速度,可將 除法的計算先化為小數或分數乘法的形式,舉例如下 64 27 42 . 0 38 . 2 ≈ ⋅ ≈ ⋅ ÷ X X X (5-3) 關於符號及溢位的問題,在組合語言的程式運算中,數字部分均是以有 號數的形式來表示,因此在乘法運算中,無論是整數或小數的運算,均較不 會有問題產生。但在作移位動作時,就需特別注意累加器對部分位元作補 0 或補1 的動作,因此必須特別對數值作處理以免產生計算上的誤差。 5.2.2 DSP程式實踐演算法 DSP程式中的工作主要是在各個中斷服務常式中執行,中斷的配置如圖 5.2,共有三個以計時器觸發的定時中斷,與一個由外部觸發的不定時中斷。 透過RS232的與電腦之間資料傳遞是在背景程式中進行,DSP接收資料時, 該不定時中斷會被觸發。
兩個頻率為20 kHz定時中斷的其中之一負責讀取A/D轉換器的轉換結 果;另一個20 kHz定時中斷的服務常式流程圖如圖5.3,負責執行無感測轉子 角度估測演算法、根據速度控制器的輸出結果產生各相電流命令以及電流控 制器的運算,並利用電流控制器的輸出產生PWM開關控制訊號。在此中斷 服務常式中可選擇使用霍爾感測器訊號或以無感測的方式所產生的正規化反 抗電流勢波形調變相電流命令。 第三個定時中斷的頻率為2 kHz,服務常式流程圖如圖5.4所示,負責以 霍爾感測器訊號計算轉速,若為定位控制模式,還需計算轉子的累計旋轉角 度。若在速度控制模式下,可選擇以霍爾感測器訊號所得到的轉速或無感測 轉速估測的結果做為速度回授。當馬達轉速穩定後,提升馬達運轉效率的演 算法亦包含在此服務常式中。 Background Process Communication Function LED Display Function
ISR c_int2( )
PWM Synchronization Rotor Position Estimation
Current Control
ISR c_int8( )
Rotor Speed Estimation Speed Control Position Control Efficiency Upgrading ISR c_int5( ) Receive RS232 Package Periodic Interrupt (20 kHz) Periodic Interrupt (2 kHz) Aperiodic Interrupt ISR c_int1( ) A/D Converter External Signal Sampling
Periodic Interrupt (20kHz)
PWM duty ratio limitation Servo ready? Disable PWM output PWM output no yes RET Sensorless rotor position estimation Sensorless rotor position estimation ISR-2
Clear interrupt flags
Reset watchdog timer
Read Hall signals and currents from A/D converter
Read Hall signals and currents from A/D converter Hall signal or sensorless selection vector control command modulation vector control command modulation Phase current controllers Phase current controllers 圖5.3 內迴路控制之程式流程圖 Output current peak value command
Speed controller Speed controller Sensorless speed estimation Sensorless speed estimation Position control? no yes Efficiency upgrading Efficiency upgrading ISR-8 RET Speed calculation using Hall signals
Speed calculation using Hall signals
Speed_Hall or Speed_est selection Record data for communication Position controller Position controller Sensorless speed control? no yes Rotation angle accumulation Rotation angle accumulation
Output for sensorless position estimation
'
E K
Output for sensorless position estimation
'
E K
5.3
實測波形比較
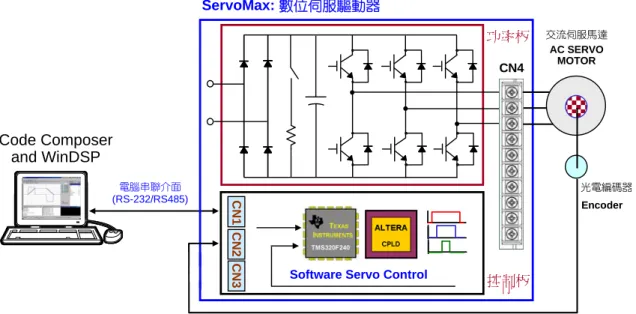
系統硬體圖5.5、圖5.6及圖5.7為永磁同步馬達伺服控制系統的發展平 台,主要包括了一個4極的弦波型永磁同步馬達(圖5.7)、功率級電路、訊號 偵測與回授電路、定點數運算的DSP(德州儀器,TMS320LF2407A)、與一台 個人電腦。馬達的參數值如表5.1所示。DSP做為控制系統之核心,負責讀取 外部訊號、各項控制機制以及無感測轉子角度與速度估測。功率級電路採用 ST公司的L6234晶片,負責依DSP的PWM開關控制訊號驅動馬達運轉。訊號 偵測與回授電路將馬達的電流訊號與霍爾感測器訊號經過放大和濾波後接到 DSP的數位類比轉換器(A/D converter)。透過RS-232的介面與DSP連結,可在 個人電腦利用WinDSP軟體觀察與調整DSP程式的所有參數與數據。 電腦串聯介面 (RS-232/RS485) CN 3 CN1 CN 2 AC SERVO MOTOR 功率板 控制板 Encoder CN4 外部控制訊號 交流伺服馬達 光電編碼器 Windows Based EasyTune: 伺服控制軟體 運動控制卡 ServoMax: 數位伺服驅動器Software Servo Control
Code Composer and WinDSP
DSP編碼器 無刷直流馬達 光學Eencoder 前級功率電路 DSP2407A 電子煞車器 DSP編碼器 無刷直流馬達 光學Eencoder 前級功率電路 DSP2407A 電子煞車器 圖5.6 實驗硬體配置
圖5.8 實際操作測試馬達
表5.1 永磁同步主軸馬達的參數值
3-phase permanent magnet synchronous motor Type Y-connection, 4 poles Rated voltage 280~340 VDC Stator resistance 1.65 Ω Stator inductance 5.5 mH Back-EMF constant 0.0523 mV/rpm (line-to-line) Rotor Power 550W Rated Speed 3350rpm 本節呈現無感測速度控制之實驗結果。圖5.8及圖5.9分別為為300 rpm及 3000rpm定速控制的實驗結果;圖5.10為穩態時,產生一步階減速命令之響 應,此無感測演算法在突然減速時無法立即反應而暫時失去同步,約在兩個 電機週期後角度估測才又恢復同步。
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 -1 -0.5 0 0.5 1 Time (sec.) Pha s e Cur ren ts ( A ) 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 0 100 200 300 400 Ro to r P o s it io n (deg re e ) 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 0 200 400 600 Steady-State Response at 300 rpm (λ = 1) S p ee d ( rp m ) Speed command Speed from Hall Estimated speed
Estimated position Position from Hall
圖5.9 無感測定轉速控制,速度命令300rpm 0.1 0.11 0.12 0.13 0.14 0.15 0.16 0.17 0.18 0.19 0.2 -4 -2 0 2 4 Time (sec.) P h a s e C u rre n ts (A ) 0.1 0.11 0.12 0.13 0.14 0.15 0.16 0.17 0.18 0.19 0.2 0 100 200 300 400 R o to r Pos it ion ( d eg ree) 0.1 0.11 0.12 0.13 0.14 0.15 0.16 0.17 0.18 0.19 0.2 0 2000 4000 6000 Steady-State Response at 3000 rpm (λ = 1) Sp eed ( rp m ) Speed command Speed from FG Estimated speed Estimated position Position from Hall
0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 -2 -1 0 1 2 Time (sec.) P h a s e C u rr e n ts ( A ) 0.040 0.06 0.08 0.1 0.12 0.14 0.16 0.18 100 200 300 400 Ro to r P o s it io n (d e g re e ) 0.040 0.06 0.08 0.1 0.12 0.14 0.16 0.18 500 1000 1500
Sensorless Speed Control with a Step Change Command
Sp eed ( rp m ) Speed Command Speed from Hall Estimated speed
Estimated position Position from Hall